
A Localization and Tracking System Using Single WiFi Link



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- A 3D MUSIC algorithm is proposed, which can estimate AOA, TOF, and radial velocity information of moving targets simultaneously; an adaptive range adjustment algorithm is implemented to reduce the search time from about ten hours to tens of seconds;
- (2)
- The adaptive Kalman filter is used to improve the performances;
- (3)
- The particle filter is used to realize real-time trajectory tracking.
2. Materials and Methods
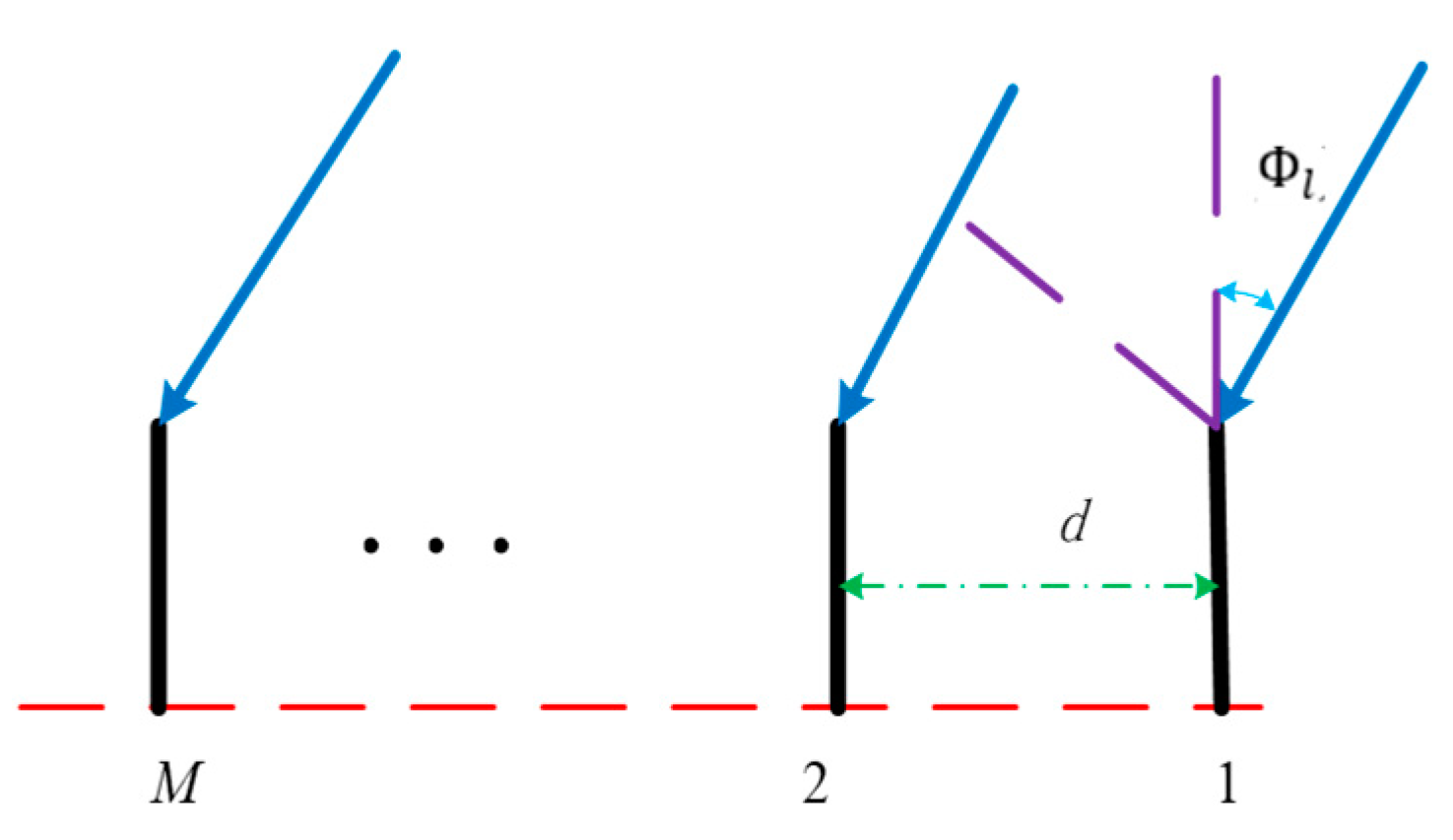
2.1. CSI Modeling
- (1)
- The phase difference due to the different propagation distances between the elements
- (2)
- The phase difference due to the different subcarrier frequencies
- (3)
- The phase difference due to the Doppler frequency shift
- (4)
- The total phase difference between the CSI subcarriers
2.2. Phase Calibration and Static Path Elimination
2.3. The Proposed System with the Three-Dimensional MUSIC Algorithm of Dynamic Step Size
2.4. Adaptive Kalman Filtering
| Algorithm 1: Real-time tracking system algorithm. |
| In put: , intalv, intalaoa, intaltof |
| Output: location |
| 1: Convert matrix; |
| 2: Compute R; 3: Obtained un; Dopple: intalv-v:0.2: intalv + v; AOA: intalaoa-aoa:2: intalaoa + aoa; TOF: intaltof-t:2 e−9: intaltof + t; 4: Use Formula (12) to calculate PMUSIC; Find parameters corresponding to the three maximum peaks 5: Take the mean value of the parameters obtained in step 4; 6: Filter Formulas (16)–(22); 7: Substitute result of step 6 into Formula (13) to ; 8: plug into Formula (14); if abs(var) > T, Re-search PMUSIC with the full range Repeat steps 4, 5, and 6, 7, 8 end |
| 9: Localization by particle filter |
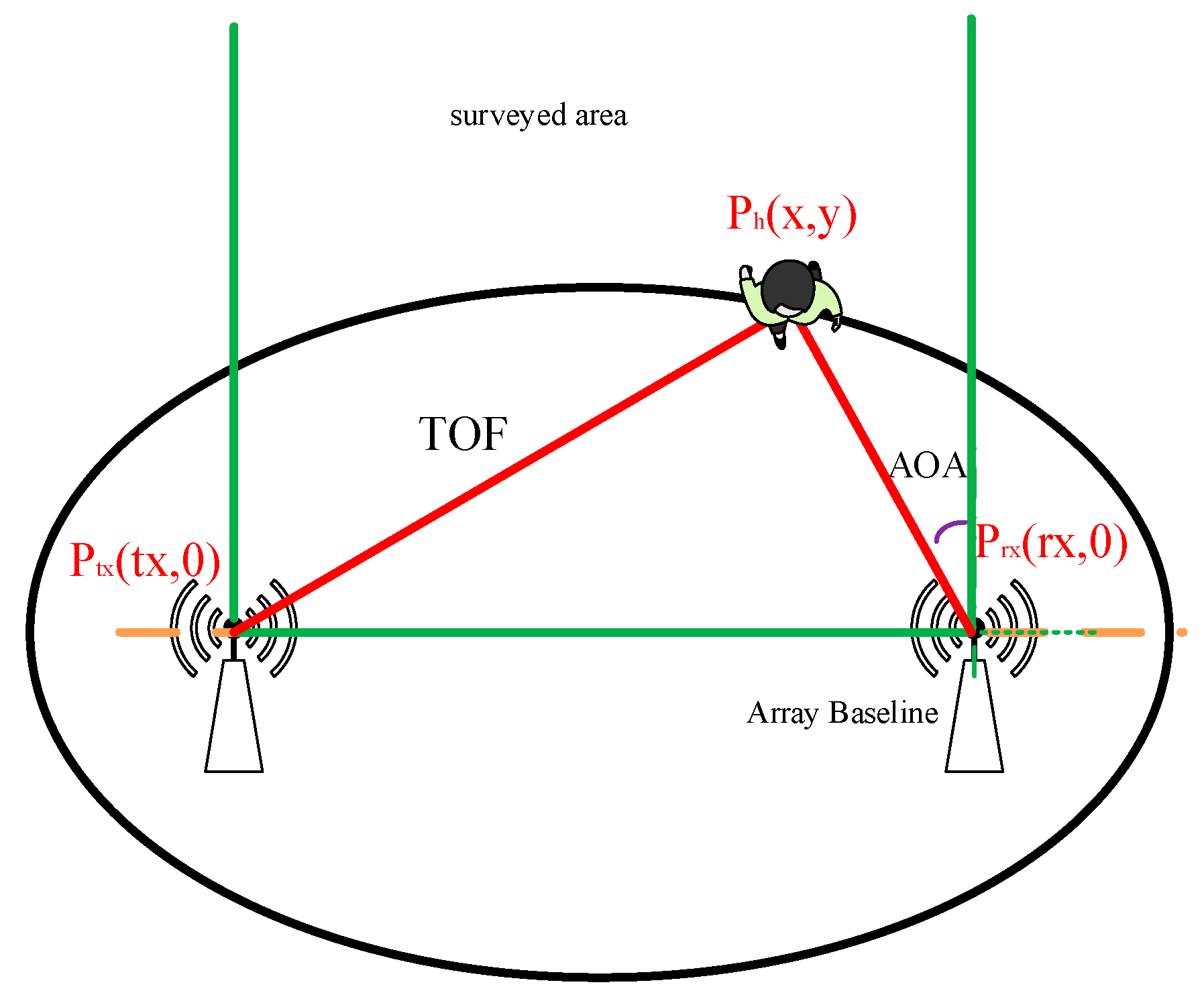
2.5. Trajectory Tracking
3. Results
3.1. Accuracy of Doppler Velocity Estimation
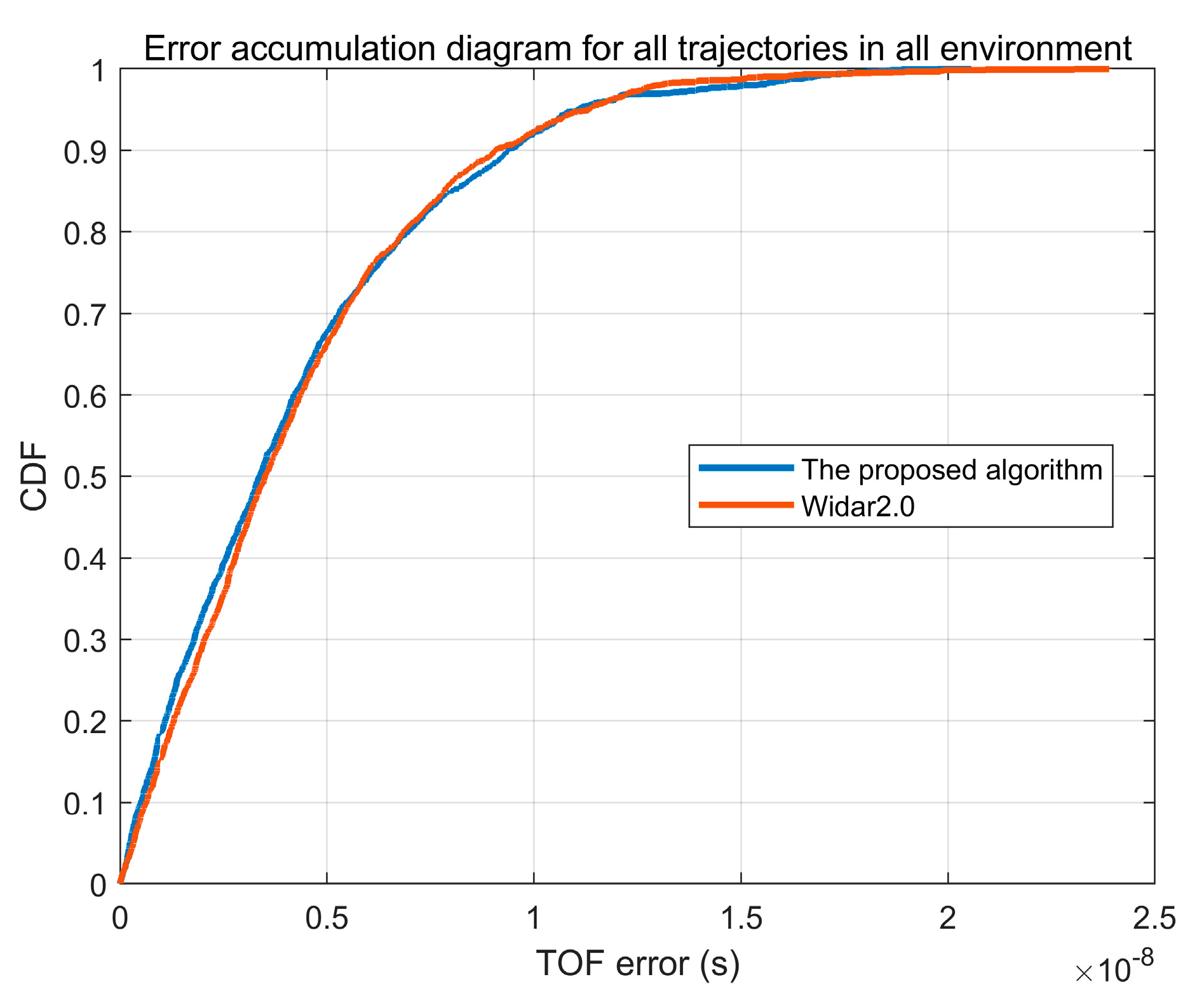
3.2. Accuracy of the TOF Estimation
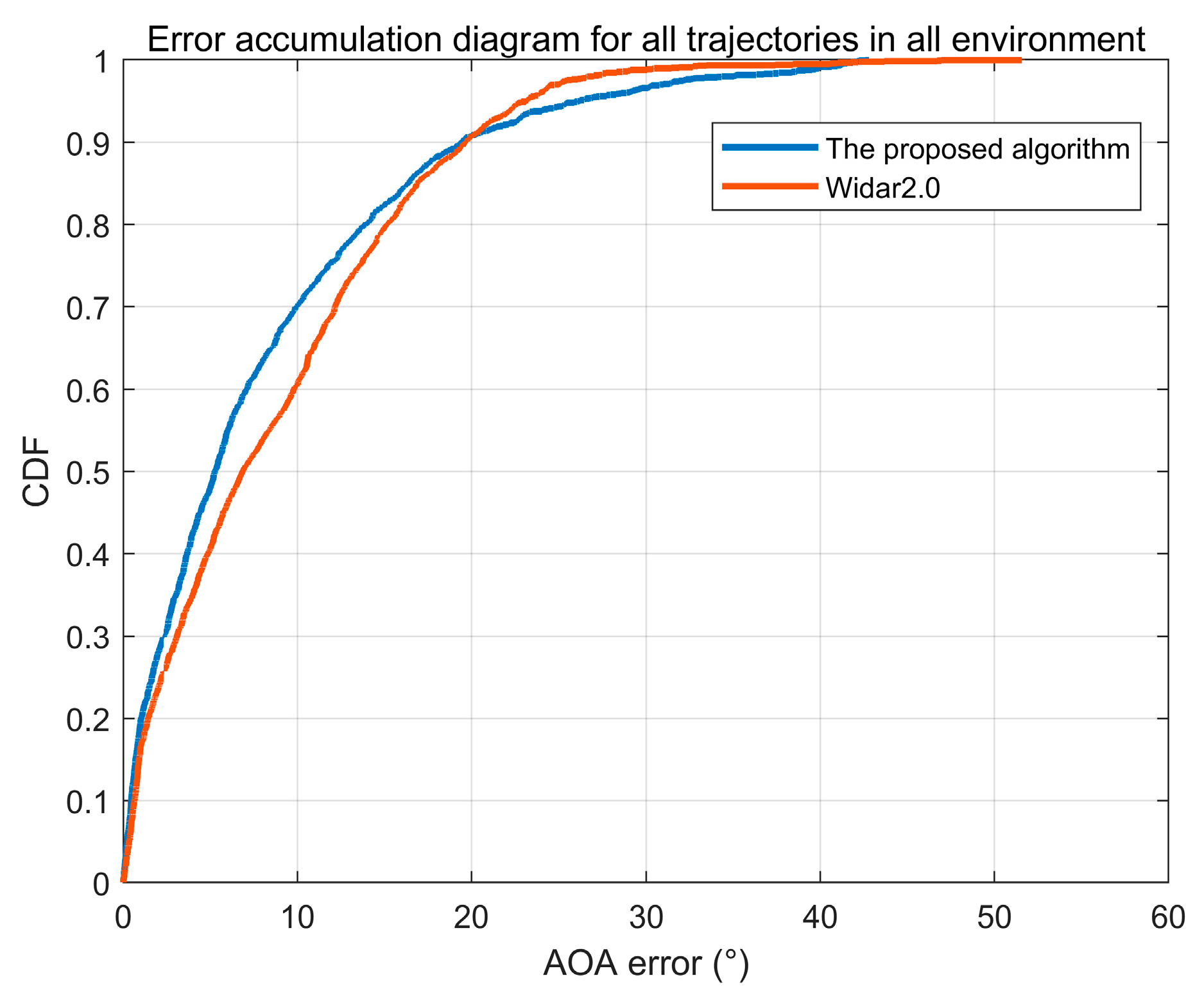
3.3. Accuracy of AOA Estimation
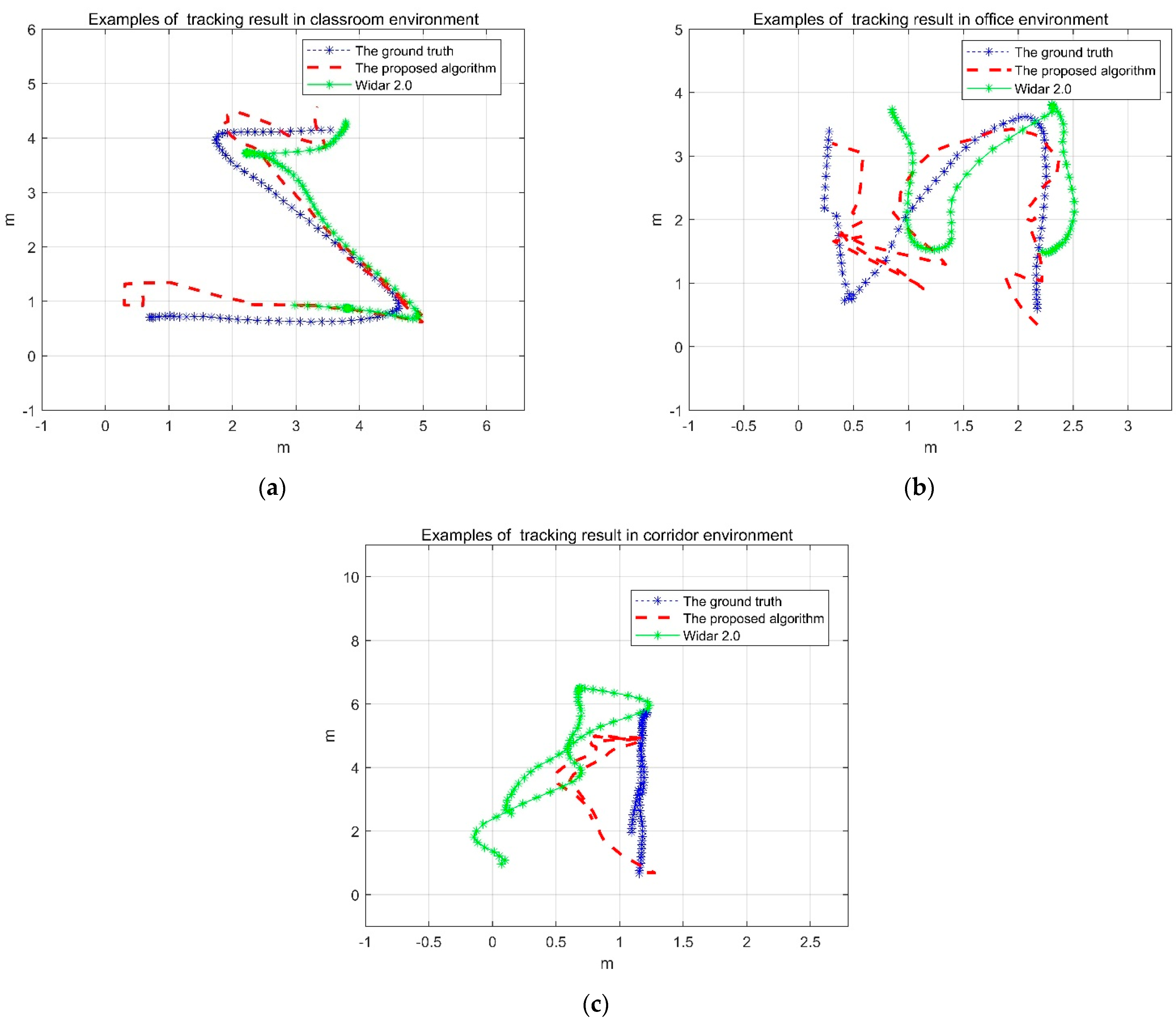
3.4. Estimation of Trajectory Accuracy
4. System Performance
4.1. The Influence of Environments on Tracking Accuracy
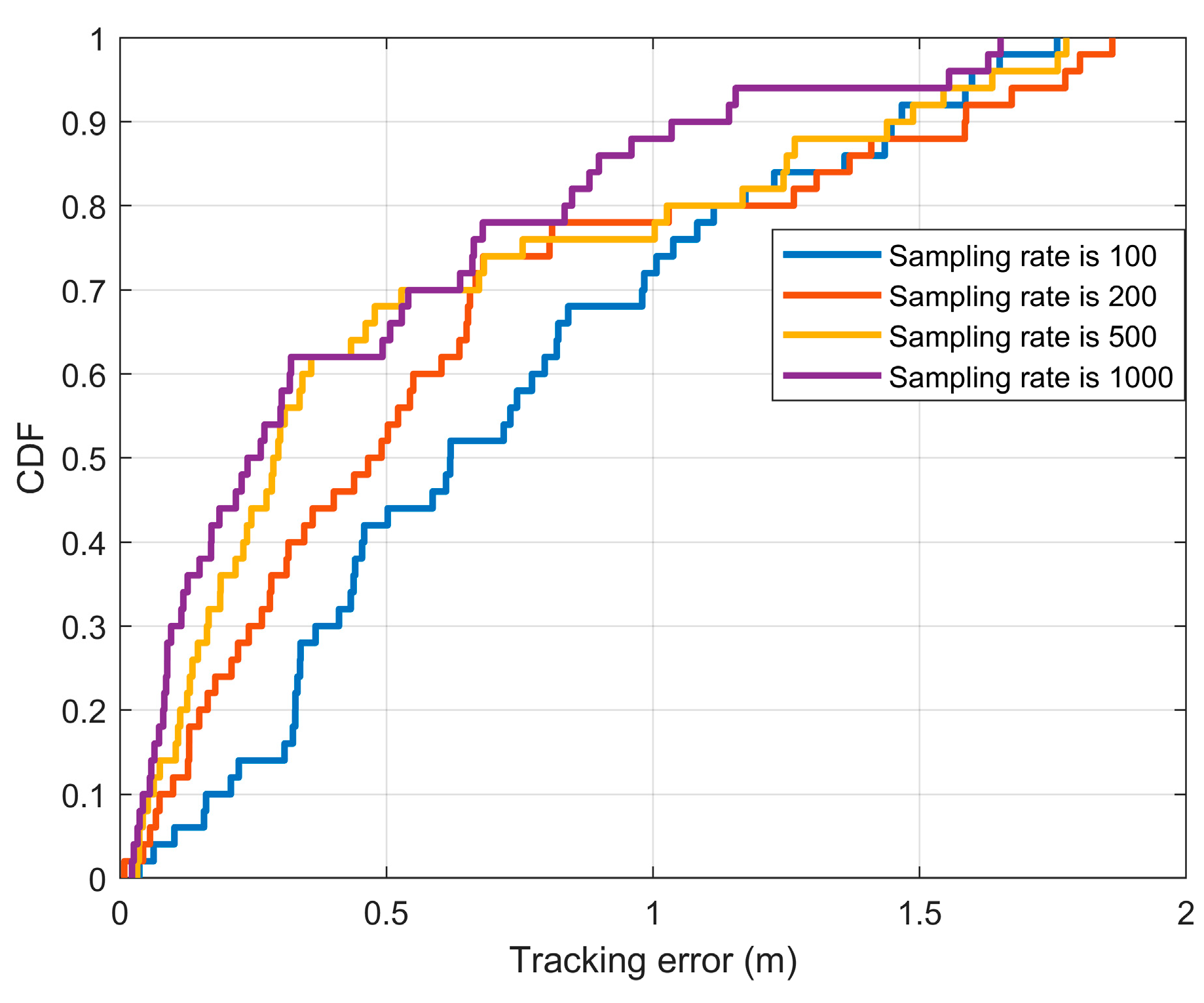
4.2. The Influence of Sampling Rates on Tracking Accuracy
4.3. The Influence of the Shapes of Trajectory on Tracking Accuracy
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Bluetooth Low Energy Based Occupancy Detection for Emergency Management. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 31–38. [Google Scholar]
- Tekler, Z.D.; Low, R.; Yuen, C.; Blessing, L. Plug-Mate: An IoT-based occupancy-driven plug load management system in smart buildings. Build. Environ. 2022, 223, 109472. [Google Scholar] [CrossRef]
- Balaji, B.; Jian, X.; Nwokafor, A.; Gupta, R.; Agarwal, Y. Sentinel: Occupancy based HVAC actuation using existing WiFi infrastructure within commercial buildings. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 11–15 November 2013; ACM: New York, NY, USA, 2013. [Google Scholar]
- Tekler, Z.D.; Chong, A. Occupancy prediction using deep learning approaches across multiple space types: A minimum sensing strategy. Build. Environ. 2022, 226, 109689. [Google Scholar] [CrossRef]
- Liu, S.; Jiang, Y.; Striegel, A. Face-to-Face Proximity Estimation Using Bluetooth on Smartphones. IEEE Trans. Mob. Comput. 2014, 13, 811–823. [Google Scholar] [CrossRef]
- Zhao, X.; Xiao, Z.; Markham, A.; Trigoni, N.; Ren, Y. Does BTLE measure up against WiFi? A comparison of indoor location performance. In Proceedings of the European Wireless 2014; 20th European Wireless Conference, Barcelona, Spain, 14–16 May 2014; VDE: Offenbach am Main, Germany, 2014. [Google Scholar]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A Scalable Bluetooth Low Energy Approach to Identify Occupancy Patterns and Profiles in Office Spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Zheng, S.; Purohit, A.; De Wagter, P.; Brinster, I.; Hamm, C.; Zhang, P. PANDAA: Physical arrangement detection of networked devices through ambient-sound awareness. In Proceedings of the Ubiquitous Computing, International Conference, Ubicomp, Beijing, China, 17–19 September 2011. [Google Scholar]
- Huang, W.; Xiong, Y.; Li, X.-Y.; Lin, H.; Yang, P.; Liu, Y. Shake and walk: Acoustic direction finding and fine-grained indoor localization using smartphones. In Proceedings of the IEEE Infocom 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April—2 May 2014. [Google Scholar]
- Mohammadmoradi, H.; Heydariaan, M.; Gnawali, O.; Kim, K. UWB-Based Single-Anchor Indoor Localization Using Reflected Multipath Components. In Proceedings of the International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 18–21 February 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Wang, C.; Xu, A.; Kuang, J.; Sui, X.; Hao, Y.; Niu, X. A High-Accuracy Indoor Localization System and Applications Based on Tightly Coupled UWB/INS/Floor Map Integration. IEEE Sens. J. 2021, 21, 18166–18177. [Google Scholar] [CrossRef]
- Jin, G.Y.; Lu, X.Y.; Park, M.S. An Indoor Localization Mechanism Using Active RFID Tag. In Proceedings of the IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing, Taichung, Taiwan, 5–7 June 2006; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar]
- Colin, E. Indoor performance analysis of LF-RFID based positioning system: Comparison with UHF-RFID and UWB. In Proceedings of the International Conference on Indoor Positioning & Indoor Navigation, Taichung, Taiwan, 5–7 June 2006; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Chen, R.; Huang, X.; Zhou, Y.; Hui, Y.; Cheng, N. UHF-RFID-Based Real-Time Vehicle Localization in GPS-Less Environments. IEEE Trans. Intell. Transp. Syst. 2021, 23, 9286–9293. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, Q.; Ma, X.; Wang, J.; Yang, T.; Wang, H. DeFi: Robust Training-Free Device-Free Wireless Localization with WiFi. IEEE Trans. Veh. Technol. 2018, 67, 8822–8831. [Google Scholar] [CrossRef]
- Zheng, Y.; Sheng, M.; Liu, J.; Li, J. OpArray: Exploiting Array Orientation for Accurate Indoor Localization. IEEE Trans. Commun. 2019, 67, 847–858. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, S.; Katabi, D. Decimeter-Level Localization with a Single WiFi Access Point; USENIX Association: Berkeley, CA, USA, 2016. [Google Scholar]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-Based Fingerprinting for Indoor Localization and Tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-Based Fingerprinting for Indoor Localization: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Shi, S.; Sigg, S.; Chen, L.; Ji, Y. Accurate Location Tracking From CSI-Based Passive Device-Free Probabilistic Fingerprinting. IEEE Trans. Veh. Technol. 2018, 67, 5217–5230. [Google Scholar] [CrossRef]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. Spotfi: Decimeter level localization using WiFi. In Proceedings of the ACM SIGCOMM, London, UK, 17–21 August 2015. [Google Scholar]
- Xiang, L.; Li, S.; Zhang, D.; Xiong, J.; Wang, Y.; Mei, H. Dynamic-MUSIC: Accurate device-free indoor localization. In Proceedings of the ACM International Joint Conference ACM, Heidelberg, Germany, 12–16 September 2016. [Google Scholar]
- Qian, K.; Wu, C.; Yang, Z.; Liu, Y.; Jamieson, K. Widar: Decimeter-Level Passive Tracking via Velocity Monitoring with Commodity WiFi. In Proceedings of the ACM MobiHoc 2017, Chennai, India, 10–14 July 2017. [Google Scholar]
- Li, X.; Zhang, D.; Lv, Q.; Xiong, J.; Li, S.; Zhang, Y.; Mei, H. IndoTrack: Device-Free Indoor Human Tracking with Commodity WiFi. In Proceedings of the ACM IMWUT 2017, Maui, HI, USA, 3 September 2017. [Google Scholar]
- Qian, K.; Wu, C.; Zhang, Y.; Zhang, G.; Yang, Z.; Liu, Y. Widar2.0: Passive Human Tracking with a Single WiFi Link. In Proceedings of the 16th Annual International Conference, Munich, Germany, 10–15 June 2018. [Google Scholar]
- Zhang, L.; Wang, H. Device-Free Tracking via Joint Velocity and AOA Estimation with Commodity WiFi. IEEE Sens. J. 2019, 19, 10662–10673. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, L.-P.; Chen, L.-Q.; Xu, Z.-M.; Chen, Z. A Localization and Tracking System Using Single WiFi Link. Remote Sens. 2023, 15, 2461. https://doi.org/10.3390/rs15092461
Tian L-P, Chen L-Q, Xu Z-M, Chen Z. A Localization and Tracking System Using Single WiFi Link. Remote Sensing. 2023; 15(9):2461. https://doi.org/10.3390/rs15092461
Chicago/Turabian StyleTian, Li-Ping, Liang-Qin Chen, Zhi-Meng Xu, and Zhizhang (David) Chen. 2023. "A Localization and Tracking System Using Single WiFi Link" Remote Sensing 15, no. 9: 2461. https://doi.org/10.3390/rs15092461
APA StyleTian, L.-P., Chen, L.-Q., Xu, Z.-M., & Chen, Z. (2023). A Localization and Tracking System Using Single WiFi Link. Remote Sensing, 15(9), 2461. https://doi.org/10.3390/rs15092461