
Multivariate Calibration of the SWAT Model Using Remotely Sensed Datasets

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
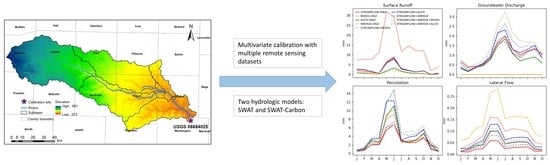
2.1. Study Area
2.2. Hydrologic Models
2.2.1. SWAT Model Description
2.2.2. SWAT-C
2.3. Model Setup
2.4. Remotely Sensed Evapotranspiration and Soil Moisture Content Data Products
2.4.1. MODIS Evapotranspiration
2.4.2. ALEXI Evapotranspiration
2.4.3. SMERGE Volumetric Soil Moisture Content
2.5. Model Calibration and Evaluation
3. Results
3.1. Sensitive Parameters Resulting from Different Multivariable Calibration Setups
3.2. Impact of Multi-Variable Model Evaluation on Model Calbiration and Performance
3.3. Effects of Choice of ET Products on Model-Simulated ET
3.4. Variations in Hydrologic Pathways under Different Calibration Schemes
3.5. Influence of Model Structure on Multivariate Model Calibration
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Herman, M.R.; Nejadhashemi, A.P.; Abouali, M.; Hernandez-Suarez, J.S.; Daneshvar, F.; Zhang, Z.; Anderson, M.C.; Sadeghi, A.M.; Hain, C.R.; Sharifi, A. Evaluating the role of evapotranspiration remote sensing data in improving hydrological modeling predictability. J. Hydrol. 2018, 556, 39–49. [Google Scholar] [CrossRef]
- Parajuli, P.B.; Jayakody, P.; Ouyang, Y. Evaluation of Using Remote Sensing Evapotranspiration Data in SWAT. Water Resour. Manag. 2018, 32, 985–996. [Google Scholar] [CrossRef]
- Qi, J.; Zhang, X.; Yang, Q.; Srinivasan, R.; Arnold, J.G.; Li, J.; Waldholf, S.T.; Cole, J. SWAT ungauged: Water quality modeling in the Upper Mississippi River Basin. J. Hydrol. 2020, 584, 124601. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Beeson, P.; Link, R.; Manowitz, D.; Izaurralde, R.C.; Sadeghi, A.; Thomson, A.M.; Sahajpal, R.; Srinivasan, R.; Arnold, J.G. Efficient multi-objective calibration of a computationally intensive hydrologic model with parallel computing software in Python. Environ. Model. Softw. 2013, 46, 208–218. [Google Scholar] [CrossRef]
- Paul, M.; Rajib, A.; Negahban-Azar, M.; Shirmohammadi, A.; Srivastava, P. Improved agricultural Water management in data-scarce semi-arid watersheds: Value of integrating remotely sensed leaf area index in hydrological modeling. Sci. Total Environ. 2021, 791, 148177. [Google Scholar] [CrossRef]
- Senay, G.B.; Friedrichs, M.; Singh, R.K.; Velpuri, N.M. Evaluating Landsat 8 evapotranspiration for water use mapping in the Colorado River Basin. Remote Sens. Environ. 2016, 185, 171–185. [Google Scholar] [CrossRef]
- Sheffield, J.; Wood, E.F.; Pan, M.; Beck, H.; Coccia, G.; Serrat-Capdevila, A.; Verbist, K. Satellite Remote Sensing for Water Resources Management: Potential for Supporting Sustainable Development in Data-Poor Regions. Water Resour. Res. 2018, 54, 9724–9758. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, Y.; Liu, D.; Nordblom, T.; Wu, B.; Yan, N. Regional Water Balance Based on Remotely Sensed Evapotranspiration and Irrigation: An Assessment of the Haihe Plain, China. Remote Sens. 2014, 6, 2514–2533. [Google Scholar] [CrossRef]
- Li, Y.; Grimaldi, S.; Pauwels, V.R.N.; Walker, J.P. Hydrologic model calibration using remotely sensed soil moisture and discharge measurements: The impact on predictions at gauged and ungauged locations. J. Hydrol. 2018, 557, 897–909. [Google Scholar] [CrossRef]
- Lee, S.; Qi, J.; McCarty, G.W.; Anderson, M.; Yang, Y.; Zhang, X.; Moglen, G.E.; Kwak, D.; Kim, H.; Lakshmi, V.; et al. Combined use of crop yield statistics and remotely sensed products for enhanced simulations of evapotranspiration within an agricultural watershed. Agric. Water Manag. 2022, 264, 107503. [Google Scholar] [CrossRef]
- Lee, S.; Qi, J.; Kim, H.; McCarty, G.W.; Moglen, G.E.; Anderson, M.; Zhang, X.; Du, L. Utility of Remotely Sensed Evapotranspiration Products to Assess an Improved Model Structure. Sustainability 2021, 13, 2375. [Google Scholar] [CrossRef]
- Bastiaanssen, W.G.M.; Menenti, M.; Feddes, R.A.; Holtslag, A.A.M. A remote sensing surface energy balance algorithm for land (SEBAL). 1. Formulation. J. Hydrol. 1998, 212–213, 198–212. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Droogers, P. Calibration of a distributed hydrological model based on satellite evapotranspiration. J. Hydrol. 2008, 349, 411–424. [Google Scholar] [CrossRef]
- Wu, X.; Zhou, J.; Wang, H.; Li, Y.; Zhong, B. Evaluation of irrigation water use efficiency using remote sensing in the middle reach of the Heihe river, in the semi-arid Northwestern China. Hydrol. Process. 2015, 29, 2243–2257. [Google Scholar] [CrossRef]
- Arnold, J.G.; Srinivasan, R.; Muttiah, R.S.; Williams, J.R. Large area hydrologic modeling and assessment part I: Model development 1. JAWRA J. Am. Water Resour. Assoc. 1998, 34, 73–89. [Google Scholar] [CrossRef]
- Choudhary, R.; Athira, P. Effect of root zone soil moisture on the SWAT model simulation of surface and subsurface hydrological fluxes. Environ. Earth Sci. 2021, 80, 620. [Google Scholar] [CrossRef]
- Kundu, D.; Vervoort, R.W.; van Ogtrop, F.F. The value of remotely sensed surface soil moisture for model calibration using SWAT. Hydrol. Process. 2017, 31, 2764–2780. [Google Scholar] [CrossRef]
- Myers, D.T.; Ficklin, D.L.; Robeson, S.M. Incorporating rain-on-snow into the SWAT model results in more accurate simulations of hydrologic extremes. J. Hydrol. 2021, 603, 126972. [Google Scholar] [CrossRef]
- Rajib, M.A.; Merwade, V.; Yu, Z. Multi-objective calibration of a hydrologic model using spatially distributed remotely sensed/in-situ soil moisture. J. Hydrol. 2016, 536, 192–207. [Google Scholar] [CrossRef]
- Shah, S.; Duan, Z.; Song, X.; Li, R.; Mao, H.; Liu, J.; Ma, T.; Wang, M. Evaluating the added value of multi-variable calibration of SWAT with remotely sensed evapotranspiration data for improving hydrological modeling. J. Hydrol. 2021, 603, 127046. [Google Scholar] [CrossRef]
- Rajib, A.; Kim, I.L.; Golden, H.E.; Lane, C.R.; Kumar, S.V.; Yu, Z.; Jeyalakshmi, S. Watershed Modeling with Remotely Sensed Big Data: MODIS Leaf Area Index Improves Hydrology and Water Quality Predictions. Remote Sens. 2020, 12, 2148. [Google Scholar] [CrossRef]
- Rajib, A.; Evenson, G.R.; Golden, H.E.; Lane, C.R. Hydrologic model predictability improves with spatially explicit calibration using remotely sensed evapotranspiration and biophysical parameters. J. Hydrol. 2018, 567, 668–683. [Google Scholar] [CrossRef]
- Zhang, G.; Su, X.; Ayantobo, O.O.; Feng, K.; Guo, J. Remote-sensing precipitation and temperature evaluation using soil and water assessment tool with multiobjective calibration in the Shiyang River Basin, Northwest China. J. Hydrol. 2020, 590, 125416. [Google Scholar] [CrossRef]
- Karimi, P.; Bastiaanssen, W.G.M. Spatial evapotranspiration, rainfall and land use data in water accounting—Part 1: Review of the accuracy of the remote sensing data. Hydrol. Earth Syst. Sci. 2015, 19, 507–532. [Google Scholar] [CrossRef]
- Pan, S.; Pan, N.; Tian, H.; Friedlingstein, P.; Sitch, S.; Shi, H.; Arora, V.K.; Haverd, V.; Jain, A.K.; Kato, E.; et al. Evaluation of global terrestrial evapotranspiration using state-of-the-art approaches in remote sensing, machine learning and land surface modeling. Hydrol. Earth Syst. Sci. 2020, 24, 1485–1509. [Google Scholar] [CrossRef]
- Velpuri, N.M.; Senay, G.B.; Singh, R.K.; Bohms, S.; Verdin, J.P. A comprehensive evaluation of two MODIS evapotranspiration products over the conterminous United States: Using point and gridded FLUXNET and water balance ET. Remote Sens. Environ. 2013, 139, 35–49. [Google Scholar] [CrossRef]
- Dembélé, M.; Hrachowitz, M.; Savenije, H.H.G.; Mariéthoz, G.; Schaefli, B. Improving the Predictive Skill of a Distributed Hydrological Model by Calibration on Spatial Patterns With Multiple Satellite Data Sets. Water Resour. Res. 2020, 56, e2019WR026085. [Google Scholar] [CrossRef]
- López, P.; Sutanudjaja, E.H.; Schellekens, J.; Sterk, G.; Bierkens, M.F.P. Calibration of a large-scale hydrological model using satellite-based soil moisture and evapotranspiration products. Hydrol. Earth Syst. Sci. 2017, 21, 3125–3144. [Google Scholar] [CrossRef]
- Sirisena, T.A.J.G.; Maskey, S.; Ranasinghe, R. Hydrological Model Calibration with Streamflow and Remote Sensing Based Evapotranspiration Data in a Data Poor Basin. Remote Sens. 2020, 12, 3768. [Google Scholar] [CrossRef]
- Yapo, P.O.; Gupta, H.V.; Sorooshian, S. Multi-objective global optimization for hydrologic models. J. Hydrol. 1998, 204, 83–97. [Google Scholar] [CrossRef]
- Zhang, X.; Liang, F.; Yu, B.; Zong, Z. Explicitly integrating parameter, input, and structure uncertainties into Bayesian Neural Networks for probabilistic hydrologic forecasting. J. Hydrol. 2011, 409, 696–709. [Google Scholar] [CrossRef]
- Zhang, X.; Srinivasan, R.; Bosch, D. Calibration and uncertainty analysis of the SWAT model using Genetic Algorithms and Bayesian Model Averaging. J. Hydrol. 2009, 374, 307–317. [Google Scholar] [CrossRef]
- Strauch, M.; Volk, M. SWAT plant growth modification for improved modeling of perennial vegetation in the tropics. Ecol. Model. 2013, 269, 98–112. [Google Scholar] [CrossRef]
- Yang, Q.; Zhang, X. Improving SWAT for simulating water and carbon fluxes of forest ecosystems. Sci. Total Environ. 2016, 569–570, 1478–1488. [Google Scholar] [CrossRef]
- Zhang, X.; Izaurralde, R.C.; Arnold, J.G.; Williams, J.R.; Srinivasan, R. Modifying the Soil and Water Assessment Tool to simulate cropland carbon flux: Model development and initial evaluation. Sci. Total Environ. 2013, 463–464, 810–822. [Google Scholar] [CrossRef]
- Qi, J.; Li, S.; Li, Q.; Xing, Z.; Bourque, C.P.-A.; Meng, F.-R. A new soil-temperature module for SWAT application in regions with seasonal snow cover. J. Hydrol. 2016, 538, 863–877. [Google Scholar] [CrossRef]
- Wang, Q.; Qi, J.; Wu, H.; Zeng, Y.; Shui, W.; Zeng, J.; Zhang, X. Freeze-Thaw cycle representation alters response of watershed hydrology to future climate change. CATENA 2020, 195, 104767. [Google Scholar] [CrossRef]
- Dieter, C.A.; Maupin, M.A.; Caldwell, R.R.; Harris, M.A.; Ivahnenko, T.I.; Lovelace, J.K.; Barber, N.L.; Linsey, K.S. Estimated Use of Water in the United States in 2015; Circular: Reston, VA, USA, 2018; p. 76. [Google Scholar]
- Dangol, S.; Zhang, X.; Liang, X.-Z.; Miralles-Wilhelm, F. Agricultural Irrigation Effects on Hydrological Processes in the United States Northern High Plains Aquifer Simulated by the Coupled SWAT-MODFLOW System. Water 2022, 14, 1938. [Google Scholar] [CrossRef]
- Alley, W.M.; Emery, P.A. Groundwater model of the Blue River basin, Nebraska—Twenty years later. J. Hydrol. 1986, 85, 225–249. [Google Scholar] [CrossRef]
- Barnes, P.L.; Kalita, P.K. Watershed monitoring to address contamination source issues and remediation of the contaminant impairments. Water Sci. Technol. 2001, 44, 51–56. [Google Scholar] [CrossRef]
- Helgesen, J.O. Surface-Water-Quality Assessment of the Lower Kansas River Basin, Kansas and Nebraska: Results of Investigations, 1987–1990; U.S. Geological Survey: Kansas, NE, USA, 1996. [Google Scholar]
- Neitsch, S.L.; Arnold, J.G.; Kiniry, J.R.; Williams, J.R. Soil and Water Assessment Tool Theoretical Documentation Version 2009; Texas Water Resources Institute: College Station, TX, USA, 2011; p. 647. [Google Scholar]
- Li, M.; Ma, Z.; Du, J. Regional soil moisture simulation for Shaanxi Province using SWAT model validation and trend analysis. Sci. China Earth Sci. 2010, 53, 575–590. [Google Scholar] [CrossRef]
- Uniyal, B.; Dietrich, J.; Vasilakos, C.; Tzoraki, O. Evaluation of SWAT simulated soil moisture at catchment scale by field measurements and Landsat derived indices. Agric. Water Manag. 2017, 193, 55–70. [Google Scholar] [CrossRef]
- Monteith, J.L. Evaporation and environment. In Symposia of the Society for Experimental Biology; Cambridge University Press (CUP) Cambridge: Cambridge, UK, 1965; Volume 19, pp. 205–234. [Google Scholar]
- Parton, W.J.; Ojima, D.S.; Cole, C.V.; Schimel, D.S. A General Model for Soil Organic Matter Dynamics: Sensitivity to Litter Chemistry, Texture and Management. In SSSA Special Publications; Bryant, R.B., Arnold, R.W., Eds.; Soil Science Society of America: Madison, WI, USA, 1994; pp. 147–167. ISBN 978-0-89118-934-3. [Google Scholar]
- Liang, K.; Qi, J.; Zhang, X.; Deng, J. Replicating measured site-scale soil organic carbon dynamics in the U.S. Corn Belt using the SWAT-C model. Environ. Model. Softw. 2022, 158, 105553. [Google Scholar] [CrossRef]
- Zhang, X. Simulating eroded soil organic carbon with the SWAT-C model. Environ. Model. Softw. 2018, 102, 39–48. [Google Scholar] [CrossRef]
- Qi, J.; Lee, S.; Du, X.; Ficklin, D.L.; Wang, Q.; Myers, D.; Singh, D.; Moglen, G.E.; McCarty, G.W.; Zhou, Y.; et al. Coupling terrestrial and aquatic thermal processes for improving stream temperature modeling at the watershed scale. J. Hydrol. 2021, 603, 126983. [Google Scholar] [CrossRef]
- Wang, Q.; Qi, J.; Qiu, H.; Li, J.; Cole, J.; Waldhoff, S.; Zhang, X. Pronounced Increases in Future Soil Erosion and Sediment Deposition as Influenced by Freeze–Thaw Cycles in the Upper Mississippi River Basin. Environ. Sci. Technol. 2021, 55, 9905–9915. [Google Scholar] [CrossRef]
- USDA NASS. Cropland Data Layer Published Crop-Specific Data Layer [Online]. USDA-NASS. Washington, DC, USA. 2008. Available online: https://nassgeodata.gmu.edu/CropScape/ (accessed on 28 March 2019).
- Pervez, M.S.; Brown, J.F. Mapping Irrigated Lands at 250-m Scale by Merging MODIS Data and National Agricultural Statistics. Remote Sens. 2010, 2, 2388–2412. [Google Scholar] [CrossRef]
- Her, Y.; Frankenberger, J.; Chaubey, I.; Srinivasan, R. Threshold Effects in HRU Definition ofthe Soil and Water Assessment Tool. Trans. ASABE 2015, 58, 367–378. [Google Scholar] [CrossRef]
- USDA-NASS. Field Crops Usual Planting and Harvesting Dates (October 2010); US Department of Agriculture National Agriculture Statistics Service: Washington, DC, USA, 2010; p. 51. [Google Scholar]
- Woznicki, S.A.; Nejadhashemi, A.P. Sensitivity Analysis of Best Management Practices Under Climate Change Scenarios1: Sensitivity Analysis of Best Management Practices Under Climate Change Scenarios. JAWRA J. Am. Water Resour. Assoc. 2012, 48, 90–112. [Google Scholar] [CrossRef]
- Ferguson, R.B.; Shapiro, C.A.; Dobermann, A.R.; Wortmann, C.S. G87–859 Fertilizer Recommendations for Soybean (Revised August 2006); Historical Materials from University of Nebraska-Lincoln Extension; University of Nebraska-Lincoln Extension: Lincoln, NE, USA, 2006. [Google Scholar]
- Van Liew, M.W.; Feng, S.; Pathak, T.B. Climate change impacts on streamflow, water quality, and best management practices for the Shell and Logan Creek Watersheds in Nebraska, USA. Int. J. Agric. Biol. Eng. 2012, 5, 13–34. [Google Scholar] [CrossRef]
- Mesinger, F.; DiMego, G.; Kalnay, E.; Mitchell, K.; Shafran, P.C.; Ebisuzaki, W.; Jović, D.; Woollen, J.; Rogers, E.; Berbery, E.H.; et al. North American regional reanalysis. Bull. Am. Meteorol. Soc. 2006, 87, 343–360. [Google Scholar] [CrossRef]
- Jarvis, A.; Reuter, H.I.; Nelson, A.; Guevara, E. Hole-filled SRTM for the Globe Version 4; CGIAR Consortium for Spatial Information: Washington DC, USA, 2008; Volume 15, pp. 25–54. Available online: http://srtm.csi.cgiar.org (accessed on 28 March 2019).
- USDA-NRCS1. State Soil Geographic (STATSGO) Database—Data User Guide; U.S. Department of Agriculture, Natural Resources Conservation Service: Washington, DC, USA, 1994. [Google Scholar]
- Running, S.; Mu, Q.; Zhao, M. MOD16A2GF MODIS/Terra Net Evapotranspiration 8-Day L4 Global 500m SIN Grid V006; NASA EOSDIS Land Processes DAAC: Sioux Falls, SD, USA, 2019. [Google Scholar] [CrossRef]
- Anderson, M. A Two-Source Time-Integrated Model for Estimating Surface Fluxes Using Thermal Infrared Remote Sensing. Remote Sens. Environ. 1997, 60, 195–216. [Google Scholar] [CrossRef]
- Crow, W.; Tobin, K. Smerge-Noah-CCI Root Zone Soil Moisture 0–40 cm L4 Daily 0.125 × 0.125 Degree V2.0 2018. Available online: http://srtm.csi.cgiar.org (accessed on 17 October 2017).
- Lin, P.; Rajib, M.A.; Yang, Z.-L.; Somos-Valenzuela, M.; Merwade, V.; Maidment, D.R.; Wang, Y.; Chen, L. Spatiotemporal Evaluation of Simulated Evapotranspiration and Streamflow over Texas Using the WRF-Hydro-RAPID Modeling Framework. J. Am. Water. Resour. Assoc. 2018, 54, 40–54. [Google Scholar] [CrossRef]
- Mu, Q.; Zhao, M.; Running, S.W. MODIS global terrestrial evapotranspiration (ET) product (NASA MOD16A2/A3). Algorithm Theor. Basis Doc. Collect. 2013, 5, 600. [Google Scholar]
- Mu, Q.; Zhao, M.; Running, S.W. Improvements to a MODIS global terrestrial evapotranspiration algorithm. Remote Sens. Environ. 2011, 115, 1781–1800. [Google Scholar] [CrossRef]
- Norman, J.M.; Anderson, M.C.; Kustas, W.P.; French, A.N.; Mecikalski, J.; Torn, R.; Diak, G.R.; Schmugge, T.J.; Tanner, B.C.W. Remote sensing of surface energy fluxes at 101-m pixel resolutions. Water Resour. Res. 2003, 39, 1221. [Google Scholar] [CrossRef]
- Anderson, M.C.; Kustas, W.P.; Norman, J.M.; Hain, C.R.; Mecikalski, J.R.; Schultz, L.; González-Dugo, M.P.; Cammalleri, C.; d’Urso, G.; Pimstein, A.; et al. Mapping daily evapotranspiration at field to continental scales using geostationary and polar orbiting satellite imagery. Hydrol. Earth Syst. Sci. 2011, 15, 223–239. [Google Scholar] [CrossRef]
- Yang, Y.; Anderson, M.C.; Gao, F.; Wardlow, B.; Hain, C.R.; Otkin, J.A.; Alfieri, J.; Yang, Y.; Sun, L.; Dulaney, W. Field-scale mapping of evaporative stress indicators of crop yield: An application over Mead, NE, USA. Remote Sens. Environ. 2018, 210, 387–402. [Google Scholar] [CrossRef]
- Tobin, K.J.; Torres, R.; Crow, W.T.; Bennett, M.E. Multi-decadal analysis of root-zone soil moisture applying the exponential filter across CONUS. Hydrol. Earth Syst. Sci. 2017, 21, 4403–4417. [Google Scholar] [CrossRef]
- Tobin, K.J.; Crow, W.T.; Dong, J.; Bennett, M.E. Validation of a New Root-Zone Soil Moisture Product: Soil MERGE. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3351–3365. [Google Scholar] [CrossRef]
- Zhang, X.; Srinivasan, R.; Van Liew, M. Multi-Site Calibration of the SWAT Model for Hydrologic Modeling. Trans. ASABE 2008, 51, 2039–2049. [Google Scholar] [CrossRef]
- Feng, Q.; Chaubey, I.; Cibin, R.; Engel, B.; Sudheer, K.P.; Volenec, J.; Omani, N. Perennial biomass production from marginal land in the Upper Mississippi River Basin. Land Degrad. Dev. 2018, 29, 1748–1755. [Google Scholar] [CrossRef]
- Moriasi, D.N.; Arnold, J.G.; Van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Gupta, H.V.; Kling, H.; Yilmaz, K.K.; Martinez, G.F. Decomposition of the mean squared error and NSE performance criteria: Implications for improving hydrological modelling. J. Hydrol. 2009, 377, 80–91. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Beven, K.; Freer, J. Equifinality, data assimilation, and uncertainty estimation in mechanistic modelling of complex environmental systems using the GLUE methodology. J. Hydrol. 2001, 249, 11–29. [Google Scholar] [CrossRef]
- Zhang, B.; Xia, Y.; Long, B.; Hobbins, M.; Zhao, X.; Hain, C.; Li, Y.; Anderson, M.C. Evaluation and comparison of multiple evapotranspiration data models over the contiguous United States: Implications for the next phase of NLDAS (NLDAS-Testbed) development. Agric. For. Meteorol. 2020, 280, 107810. [Google Scholar] [CrossRef]
- Miralles, D.G.; Jiménez, C.; Jung, M.; Michel, D.; Ershadi, A.; McCabe, M.F.; Hirschi, M.; Martens, B.; Dolman, A.J.; Fisher, J.B.; et al. The WACMOS-ET project—Part 2: Evaluation of global terrestrial evaporation data sets. Hydrol. Earth Syst. Sci. 2016, 20, 823–842. [Google Scholar] [CrossRef]
- Faisol, A.; Indarto; Novita, E. Budiyono An evaluation of MODIS global evapotranspiration product (MOD16A2) as terrestrial evapotranspiration in East Java—Indonesia. IOP Conf. Ser. Earth Environ. Sci. 2020, 485, 12002. [Google Scholar] [CrossRef]
- Qi, J.; Zhang, X.; McCarty, G.W.; Sadeghi, A.M.; Cosh, M.H.; Zeng, X.; Gao, F.; Daughtry, C.S.T.; Huang, C.; Lang, M.W.; et al. Assessing the performance of a physically-based soil moisture module integrated within the Soil and Water Assessment Tool. Environ. Model. Softw. 2018, 109, 329–341. [Google Scholar] [CrossRef]
- Sun, L.; Anderson, M.C.; Gao, F.; Hain, C.; Alfieri, J.G.; Sharifi, A.; McCarty, G.W.; Yang, Y.; Yang, Y.; Kustas, W.P.; et al. Investigating water use over the C hoptank R iver W atershed using a multisatellite data fusion approach. Water Resour. Res. 2017, 53, 5298–5319. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Resolution | Source |
|---|---|---|
| Weather | 0.3° × 0.3° | NARR [59] |
| Digital Elevation Model (DEM) | 90 m × 90 m | Shuttle Radar Topography Mission (SRTM) [60] |
| Land Use | 30 m × 30 m | USDA NASS Cropland Data Layer [52] |
| MODIS Irrigated Land | 250 m × 250 m | Pervez and Brown [53] |
| Soil Property | 1:250,000 | STATSGO [61] |
| Data | Resolution | Source |
|---|---|---|
| MODIS Evapotranspiration | 500 m × 500 m | Running et al. [62] |
| ALEXI Evapotranspiration | 4 km × 4 km | Anderson [63] |
| SMERGE 40 cm volumetric soil moisture content | 0.125° × 0.125° | Crow and Tobin [64] |
| Parameters | Unit | Benchmark (Streamflow Only) | MODIS Only | ALEXI Only | SMERGE Only | Streamflow + MODIS | Streamflow + ALEXI | Streamflow + SMERGE | Streamflow + SMERGE + MODIS | Streamflow + SMERGE + ALEXI |
|---|---|---|---|---|---|---|---|---|---|---|
| r_CN2 | * | −0.004 (−17.49) | 0.188 (47.71) | −0.122 (−35.42) | −0.149 (−56.73) | 0.0035 (−14.06) | −0.004 (−18.57) | −0.008 (−19.50) | −0.0003 (−16.35) | −0.025 (−20.44) |
| v_EPCO | * | 0.946 (1.68) | 0.904 (−3.01) | 0.813 (2.26) | 0.982 (3.38) | 0.773 (1.50) | 0.862 (1.72) | 0.929 (1.78) | 0.816 (1.62) | 0.982 (−1.81) |
| a_GWQMN | mm | −250.75 (−1.58) | −486.25 (1.66) | 329.25 (−1.74) | – | 373.25 (−1.54) | −58.75 (−1.60) | −210.75 (−1.55) | 399.75 (−1.51) | −434.5 (−1.57) |
| r_SOL_AWC | mmH2O/mm soil | 0.137 (−0.81) | −0.047 (−10.82) | 0.067 (4.71) | 0.282 (60.84) | −0.174 (−2.02) | – | 0.129 (1.88) | 0.088 (0.93) | 0.233 (2.03) |
| v_FFCB | * | 0.441 (0.88) | – | – | – | 0.128 (0.80) | 0.505 (0.91) | 0.243 (0.85) | 0.571 (0.77) | 0.282 (0.88) |
| v_SURLAG | days | 8.122 (−0.81) | – | – | – | 3.863 (0.68) | 6.483 (0.67) | – | – | – |
| v_REVAPMN | mm | 100.133 (−0.81) | 0.135 (−2.43) | 59.384 (3.40) | 247.38 (−3.09) | 236.63 (−1.14) | – | 218.13 (−0.92) | 366.38 (−1.25) | 174.256 (−0.71) |
| r_SOL_BD | Mg/m3 | −0.290 (−0.92) | 0.058 (5.56) | – | 0.217 (−3.98) | – | 0.105 (−0.92) | −0.004 (−1.07) | – | 0.249 (−1.06) |
| v_ESCO | * | – | 0.973 (29.75) | 0.931 (2.04) | – | 0.948 (2.86) | – | – | 0.989 (2.77) | – |
| v_GW_REVAP | * | 0.023 (−0.90) | 0.163 (5.24) | 0.022 (−4.63) | 0.143 (2.56) | – | 0.037 (−1.11) | 0.029 (−0.77) | – | 0.021 (−0.97) |
| v_SLSOIL | m | – | 29.21 (−2.14) | – | – | – | – | – | – | – |
| Calibration Setups | Performance Metrics | NSE | KGE | PBIAS | |||
|---|---|---|---|---|---|---|---|
| Cal | Val | Cal | Val | Cal | Val | ||
| Benchmark (Streamflow only) | Streamflow | 0.56 | 0.72 | 0.78 | 0.55 | 4.48 | 43.31 |
| ALEXI ET | 0.85 | 0.79 | 0.88 | 0.83 | 0.25 | 3.03 | |
| Soil moisture | 0.05 | −0.28 | 0.69 | 0.65 | 7.02 | 10.96 | |
| Average | 0.49 | 0.41 | 0.78 | 0.68 | 3.92 | 19.10 | |
| ALEXI ET only | Streamflow | 0.19 | 0.44 | 0.17 | 0.13 | 56.07 | 69.31 |
| ALEXI ET | 0.86 | 0.81 | 0.88 | 0.85 | −0.30 | 1.86 | |
| Soil moisture | 0.19 | 0.22 | 0.71 | 0.66 | −3.90 | −1.37 | |
| Average | 0.41 | 0.49 | 0.59 | 0.55 | 17.29 | 23.27 | |
| SMERGE only | Streamflow | −0.22 | 0.20 | −0.13 | −0.11 | 81.47 | 86.48 |
| ALEXI ET | 0.85 | 0.81 | 0.89 | 0.86 | 0.21 | 1.34 | |
| Soil moisture | 0.44 | 0.37 | 0.74 | 0.73 | 1.71 | 5.12 | |
| Average | 0.36 | 0.46 | 0.50 | 0.49 | 27.80 | 30.98 | |
| Streamflow + ALEXI ET | Streamflow | 0.53 | 0.75 | 0.77 | 0.63 | 2.82 | 35.52 |
| ALEXI ET | 0.86 | 0.81 | 0.87 | 0.83 | 3.57 | 4.38 | |
| Soil moisture | 0.00 | 0.03 | 0.63 | 0.59 | −6.71 | −5.40 | |
| Average | 0.46 | 0.53 | 0.76 | 0.68 | −0.11 | 11.50 | |
| Streamflow + SMERGE | Streamflow | 0.52 | 0.72 | 0.78 | 0.56 | 5.22 | 42.12 |
| ALEXI ET | 0.86 | 0.80 | 0.88 | 0.83 | 1.48 | 3.71 | |
| Soil moisture | −0.01 | 0.12 | 0.69 | 0.66 | −7.11 | −4.48 | |
| Average | 0.46 | 0.55 | 0.78 | 0.68 | −0.14 | 13.78 | |
| Streamflow + ALEXI ET + SMERGE | Streamflow | 0.53 | 0.71 | 0.77 | 0.53 | 2.32 | 44.97 |
| ALEXI ET | 0.86 | 0.80 | 0.89 | 0.83 | 0.49 | 3.15 | |
| Soil moisture | 0.22 | 0.24 | 0.71 | 0.67 | −2.91 | 0.14 | |
| Average | 0.54 | 0.58 | 0.79 | 0.68 | −0.03 | 16.09 | |
| Calibration Setups | Performance Metrics | NSE | KGE | PBIAS | |||
|---|---|---|---|---|---|---|---|
| Cal | Val | Cal | Val | Cal | Val | ||
| MODIS ET only | Streamflow | −7.60 | −3.37 | −1.92 | −1.46 | −213.13 | −182.22 |
| MODIS ET | 0.33 | 0.51 | 0.62 | 0.74 | −14.45 | −2.11 | |
| Soil moisture | 0.05 | −0.11 | 0.52 | 0.43 | 5.11 | 6.05 | |
| Average | −2.41 | −0.99 | −0.26 | −0.10 | −74.16 | −59.43 | |
| Streamflow + MODIS ET | Streamflow | 0.52 | 0.75 | 0.77 | 0.71 | 2.39 | 25.96 |
| MODIS ET | −0.16 | 0.38 | 0.30 | 0.60 | −37.20 | −24.08 | |
| Soil moisture | 0.05 | −0.10 | 0.58 | 0.52 | 5.77 | 6.91 | |
| Average | 0.14 | 0.34 | 0.55 | 0.61 | −9.68 | 2.93 | |
| Streamflow + MODIS ET + SMERGE | Streamflow | 0.49 | 0.73 | 0.75 | 0.78 | 3.51 | 15.97 |
| MODIS ET | −0.13 | 0.41 | 0.30 | 0.62 | −35.46 | −22.09 | |
| Soil moisture | −0.05 | 0.00 | 0.68 | 0.62 | −7.67 | −6.49 | |
| Average | 0.10 | 0.38 | 0.58 | 0.67 | −13.21 | −4.20 | |
| Calibration Setups | Performance Metrics | NSE | KGE | PBIAS | |||
|---|---|---|---|---|---|---|---|
| Cal | Val | Cal | Val | Cal | Val | ||
| Benchmark (Streamflow only) | Streamflow | 0.63 | 0.72 | 0.80 | 0.79 | −2.02 | 18.59 |
| ALEXI ET | 0.84 | 0.81 | 0.87 | 0.83 | 1.86 | 7.13 | |
| Soil moisture | 0.08 | 0.11 | 0.71 | 0.73 | 0.41 | 0.82 | |
| Average | 0.52 | 0.55 | 0.79 | 0.78 | 0.08 | 8.85 | |
| Streamflow + ALEXI ET | Streamflow | 0.64 | 0.71 | 0.81 | 0.76 | 5.45 | 17.68 |
| ALEXI ET | 0.84 | 0.81 | 0.88 | 0.83 | 2.28 | 7.39 | |
| Soil moisture | 0.08 | 0.11 | 0.71 | 0.72 | −0.43 | −0.22 | |
| Average | 0.52 | 0.54 | 0.80 | 0.77 | 2.43 | 8.28 | |
| Streamflow + SMERGE | Streamflow | 0.62 | 0.69 | 0.80 | 0.77 | 7.59 | 5.49 |
| ALEXI ET | 0.86 | 0.82 | 0.87 | 0.84 | 2.61 | 7.61 | |
| Soil moisture | −0.03 | −0.05 | 0.73 | 0.71 | 6.25 | 6.20 | |
| Average | 0.48 | 0.49 | 0.80 | 0.77 | 5.48 | 6.43 | |
| Streamflow + ALEXI ET + SMERGE | Streamflow | 0.63 | 0.69 | 0.80 | 0.77 | 8.31 | 5.48 |
| ALEXI ET | 0.85 | 0.82 | 0.87 | 0.84 | 2.74 | 7.63 | |
| Soil moisture | −0.04 | −0.05 | 0.73 | 0.72 | 6.26 | 6.27 | |
| Average | 0.48 | 0.49 | 0.80 | 0.78 | 5.77 | 6.46 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dangol, S.; Zhang, X.; Liang, X.-Z.; Anderson, M.; Crow, W.; Lee, S.; Moglen, G.E.; McCarty, G.W. Multivariate Calibration of the SWAT Model Using Remotely Sensed Datasets. Remote Sens. 2023, 15, 2417. https://doi.org/10.3390/rs15092417
Dangol S, Zhang X, Liang X-Z, Anderson M, Crow W, Lee S, Moglen GE, McCarty GW. Multivariate Calibration of the SWAT Model Using Remotely Sensed Datasets. Remote Sensing. 2023; 15(9):2417. https://doi.org/10.3390/rs15092417
Chicago/Turabian StyleDangol, Sijal, Xuesong Zhang, Xin-Zhong Liang, Martha Anderson, Wade Crow, Sangchul Lee, Glenn E. Moglen, and Gregory W. McCarty. 2023. "Multivariate Calibration of the SWAT Model Using Remotely Sensed Datasets" Remote Sensing 15, no. 9: 2417. https://doi.org/10.3390/rs15092417
APA StyleDangol, S., Zhang, X., Liang, X.-Z., Anderson, M., Crow, W., Lee, S., Moglen, G. E., & McCarty, G. W. (2023). Multivariate Calibration of the SWAT Model Using Remotely Sensed Datasets. Remote Sensing, 15(9), 2417. https://doi.org/10.3390/rs15092417