
Multi-LEO Satellite Stereo Winds

Abstract
1. Introduction
2. Materials and Methods
2.1. Stereo Wind Retrievals
2.2. Multi-Angle Sensing
3. Results
4. Discussion
4.1. Validation
4.1.1. Clear-Sky Terrain Features
4.1.2. LiDAR Layer Heights
4.1.3. Reanalysis Winds
4.2. Applications
4.2.1. Consistency in Polar Day–Night Cloudiness
4.2.2. Polar Meridional Transport Processes
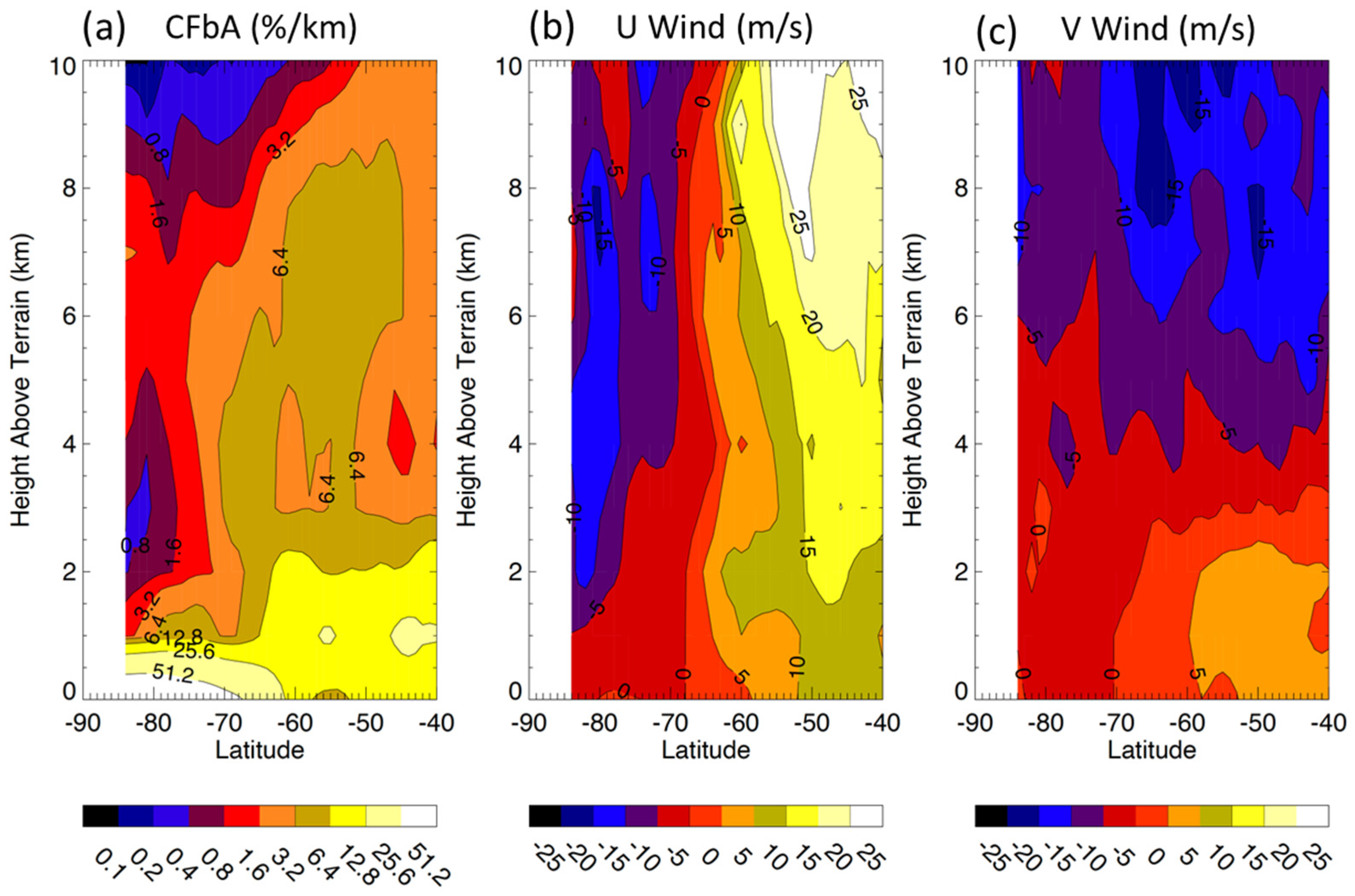
4.2.3. Antarctic Tropospheric Circulation
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Solution by Simple Least Squares
Appendix A.2. Solution with Priors
Appendix A.3. Solution by Constrained Optimization
Appendix A.4. Cloud Mask Only
Appendix B




References
- Menzel, W.P. Cloud tracking with satellite imagery: From the pioneering work of Ted Fujita to the present. Bull. Am. Meteorol. Soc. 2001, 82, 33–47. [Google Scholar] [CrossRef]
- Velden, C.; Daniels, J.; Stettner, D.; Santek, D.; Key, J.; Dunion, J.; Holmlund, K.; Dengel, G.; Bresky, W.; Menzel, P. Recent innovations in deriving tropospheric winds from meteorological satellites. Bull. Am. Meteorol. Soc. 2005, 86, 205–224. [Google Scholar] [CrossRef]
- Daniels, J.; Bresky, W.; Bailey, A.; Allegrino, A.; Velden, C.S.; Wanzong, S. Winds from ABI on the GOES-R Series. In The GOES-R Series; Elsevier: Amsterdam, The Netherlands, 2020; pp. 79–94. [Google Scholar] [CrossRef]
- Borde, R.; Carranza, M.; Hautecoeur, O.; Barbieux, K. Winds of Change for Future Operational AMV at EUMETSAT. Remote Sens. 2019, 11, 2111. [Google Scholar] [CrossRef]
- Key, J.R.; Santek, D.; Velden, C.S.; Bormann, N.; Thepaut, J.N.; Riishojgaard, L.P.; Zhu, Y.; Menzel, W.P. Cloud-drift and water vapor winds in the polar regions from MODISIR. IEEE Trans. Geosci. Remote Sens. 2003, 41, 482–492. [Google Scholar] [CrossRef]
- Santek, D. The impact of satellite-derived polar winds on lower-latitude forecasts. Mon. Weather Rev. 2010, 138, 123–139. [Google Scholar] [CrossRef]
- Nieman, S.J.; Schmetz, J.; Menzel, W.P. A Comparison of Several Techniques to Assign Heights to Cloud Tracers. J. Appl. Meteorol. 1993, 32, 1559–1568. [Google Scholar] [CrossRef]
- Velden, C.S.; Bedka, K.M. Identifying the Uncertainty in Determining Satellite-Derived Atmospheric Motion Vector Height Attribution. J. Appl. Meteorol. Clim. 2009, 48, 450–463. [Google Scholar] [CrossRef]
- Bedka, K.M.; Velden, C.S.; Petersen, R.A.; Feltz, W.F.; Mecikalski, J.R. Comparisons of Satellite-Derived Atmospheric Motion Vectors, Rawinsondes, and NOAA Wind Profiler Observations. J. Appl. Meteorol. Clim. 2009, 48, 1542–1561. [Google Scholar] [CrossRef]
- Weissmann, M.; Folger, K.; Lange, H. Height Correction of Atmospheric Motion Vectors Using Airborne Lidar Observations. J. Appl. Meteorol. Clim. 2013, 52, 1868–1877. [Google Scholar] [CrossRef]
- Hernandez-Carrascal, A.; Bormann, N. Atmospheric Motion Vectors from Model Simulations. Part II: Interpretation as Spatial and Vertical Averages of Wind and Role of Clouds. J. Appl. Meteorol. Clim. 2014, 53, 65–82. [Google Scholar] [CrossRef]
- Wood, R.; Bretherton, C.S. Boundary Layer Depth, Entrainment, and Decoupling in the Cloud-Capped Subtropical and Tropical Marine Boundary Layer. J. Clim. 2004, 17, 3576–3588. [Google Scholar] [CrossRef]
- Zuidema, P.; Painemal, D.; De Szoeke, S.; Fairall, C. Stratocumulus cloud-top height estimates and their climatic implications. J. Clim. 2009, 22, 4652–4666. [Google Scholar] [CrossRef]
- Karlsson, J.; Svensson, G.; Cardoso, S.; Teixeira, J.; Paradise, S. Subtropical cloud-regime transitions: Boundary layer depth and cloud-top height evolution in models and observations. J. Appl. Meteorol. Climatol. 2010, 49, 1845–1858. [Google Scholar] [CrossRef]
- Zhu, A.; Ramanathan, V.; Li, F.; Kim, D. Dust plumes over the Pacific, Indian, and Atlantic oceans: Climatology and radiative impact. J. Geophys. Res. Atmos. 2007, 112. [Google Scholar] [CrossRef]
- Val-Martin, M.; Logan, J.; Kahn, R.; Leung, F.-Y.; Nelson, D.L.; Diner, D.J. Smoke injection heights from fires in North America: Analysis of 5 years of satellite observations. Atmos. Chem. Phys. 2010, 10, 1491–1510. [Google Scholar] [CrossRef]
- Woodhouse, M.J.; Hogg, A.J.; Phillips, J.C.; Sparks, R.S. Interaction between volcanic plumes and wind during the 2010 Eyjafjallajökull eruption, Iceland. J. Geophys. Res. Solid Earth 2013, 118, 92–109. [Google Scholar] [CrossRef]
- Sassen, K.; Khvorostyanov, V.I. Cloud effects from boreal forest fire smoke: Evidence for ice nucleation from polarization lidar data and cloud model simulations. Environ. Res. Lett. 2008, 3, 025006. [Google Scholar] [CrossRef]
- Delanoë, J.; Hogan, R.J. Combined CloudSat-CALIPSO-MODIS retrievals of the properties of ice clouds. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef]
- Rennie, M.P.; Isaksen, L.; Weiler, F.; de Kloe, J.; Kanitz, T.; Reitebuch, O. The impact of Aeolus wind retrievals on ECMWF global weather forecasts. Q. J. R. Meteorol. Soc. 2021, 147, 3555–3586. [Google Scholar] [CrossRef]
- Garrett, K.; Liu, H.; Ide, K.; Hoffman, R.N.; Lukens, K.E. Optimization and impact assessment of Aeolus HLOS wind assimilation in NOAA’s global forecast system. Q. J. R. Meteorol. Soc. 2022, 148, 2703–2716. [Google Scholar] [CrossRef]
- Laroche, S.; St-James, J. Impact of the Aeolus Level-2B horizontal line-of-sight winds in the Environment and Climate Change Canada global forecast system. Q. J. R. Meteorol. Soc. 2022, 148, 2047–2062. [Google Scholar] [CrossRef]
- Holz, R.E.; Ackerman, S.A.; Nagle, F.W.; Frey, R.; Dutcher, S.; Kuehn, R.E.; Vaughan, M.A.; Baum, B. Global Moderate Resolution Imaging Spectroradiometer (MODIS) cloud detection and height evaluation using CALIOP. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Garay, M.J.; de Szoeke, S.P.; Moroney, C.M. Comparison of marine stratocumulus cloud top heights in the southeastern Pacific retrieved from satellites with coincident ship-based observations. J. Geophys. Res. Atmos. 2008, 27, 113. [Google Scholar] [CrossRef]
- Hasler, A.F. Stereographic Observations from Geosynchronous Satellites: An Important New Tool for the Atmospheric Sciences. Bull. Am. Meteorol. Soc. 1981, 62, 194–212. [Google Scholar] [CrossRef]
- Chapel, J.; Stancliffe, D.; Bevacqua, T.; Winkler, S.; Clapp, B.; Rood, T.; Gaylor, D.; Freesland, D.; Krimchansky, A. Guidance, navigation, and control performance for the GOES-R spacecraft. CEAS Space J. 2015, 7, 87–104. [Google Scholar] [CrossRef]
- Tan, B.; Dellomo, J.J.; Folley, C.N.; Grycewicz, T.J.; Houchin, S.; Isaacson, P.J.; Johnson, P.D.; Porter, B.C.; Reth, A.D.; Thiyanaratnam, P.; et al. GOES-R series image navigation and registration performance assessment tool set. J. Appl. Remote Sens. 2020, 14, 032405. [Google Scholar] [CrossRef]
- Carr, J.L.; Wu, D.L.; Daniels, J.; Friberg, M.D.; Bresky, W.; Madani, H. GEO–GEO Stereo-Tracking of Atmospheric Motion Vectors (AMVs) from the Geostationary Ring. Remote Sens. 2020, 12, 3779. [Google Scholar] [CrossRef]
- Carr, J.L.; Daniels, J.; Wu, D.L.; Bresky, W.; Tan, B. A Demonstration of Three-Satellite Stereo Winds. Remote Sens. 2022, 14, 5290. [Google Scholar] [CrossRef]
- Carr, J.L.; Wu, D.L.; Kelly, M.A.; Gong, J. MISR-GOES 3D Winds: Implications for Future LEO-GEO and LEO-LEO Winds. Remote Sens. 2018, 10, 1885. [Google Scholar] [CrossRef]
- Carr, J.L.; Wu, D.L.; Wolfe, R.E.; Madani, H.; Lin, G.; Tan, B. Joint 3D-Wind Retrievals with Stereoscopic Views from MODIS and GOES. Remote Sens. 2019, 11, 2100. [Google Scholar] [CrossRef]
- Diner, D.J.; Beckert, J.C.; Reilly, T.H.; Bruegge, C.J.; Conel, J.E.; Kahn, R.A.; Martonchik, J.V.; Ackerman, T.P.; Davies, R.; Gerstl, S.A.; et al. Multi-angle Imaging SpectroRadiometer (MISR) instrument description and experiment overview. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1072–1087. [Google Scholar] [CrossRef]
- Muller, J.P.; Mandanayake, A.; Moroney, C.; Davies, R.; Diner, D.J.; Paradise, S. MISR stereoscopic image matchers: Techniques and results. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1547–1559. [Google Scholar] [CrossRef]
- Mueller, K.J.; Wu, D.L.; Horváth, Á.; Jovanovic, V.M.; Muller, J.-P.; Di Girolamo, L.; Garay, M.J.; Diner, D.J.; Moroney, C.M.; Wanzong, S. Assessment of MISR cloud motion vectors (CMVs) relative to GOES and MODIS atmospheric motion vectors (AMVs). J. Appl. Meteorol. Climatol. 2017, 56, 555–572. [Google Scholar] [CrossRef]
- Mueller, K.J.; Di Girolamo, L.; Fromm, M.; Palm, S.P. Stereo observations of polar stratospheric clouds. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Coppo, P.; Mastrandrea, C.; Stagi, M.; Calamai, L.; Barilli, M.; Nieke, J. The sea and land surface temperature radiometer (SLSTR) detection assembly design and performance. In Sensors, Systems, and Next-Generation Satellites XVII; SPIE: Bellingham, WA, USA, 2013; Volume 8889, pp. 256–279. [Google Scholar] [CrossRef]
- Barbieux, K.; Hautecoeur, O.; De Bartolomei, M.; Carranza, M.; Borde, R. The Sentinel-3 SLSTR Atmospheric Motion Vectors Product at EUMETSAT. Remote Sens. 2021, 13, 1702. [Google Scholar] [CrossRef]
- Muller, J.P.; Fisher, D.; Yershov, V. Stereo Retrievals of Cloud and Smoke Winds and Heights from EO Platforms: Past, Present and Future. In Proceedings of the International Winds Workshop #12, Auckland, New Zealand, 20–24 February 2012; Available online: https://www-cdn.eumetsat.int/files/2020-04/pdf_conf_p60_s1_05_muller_v.pdf (accessed on 6 January 2023).
- Muller, J.P.; Walton, D.; Fisher, D.; Cole, R. SMVs (Stereo Motion Vectors) from ASTR2-AATSR and MISRlite (Multi-Angle Infrared Stereo Radiometer) Constellation. In Proceedings of the 10th International Winds Workshop, Tokyo, Japan, 22–26 February 2010; pp. 22–26. Available online: https://www-cdn.eumetsat.int/files/2020-04/pdf_conf_p56_s7_04_muller_v.pdf (accessed on 6 January 2023).
- Muller, J.P.; Denis, M.A.; Dundas, R.D.; Mitchell, K.L.; Naud, C.; Mannstein, H. Stereo cloud-top heights and cloud fraction retrieval from ATSR-2. Int. J. Remote Sens. 2007, 28, 1921–1938. [Google Scholar] [CrossRef]
- Fisher, D.; Poulsen, C.A.; Thomas, G.E.; Muller, J.P. Synergy of stereo cloud top height and ORAC optimal estimation cloud retrieval: Evaluation and application to AATSR. Atmos. Meas. Tech. 2016, 9, 909–928. [Google Scholar] [CrossRef]
- Seiz, G.; Poli, D.; Gruen, A. Stereo cloud-top heights from MISR and AATSR for validation of Eumetsat cloud-top height products. In Proceedings of the Prague: EUMESTAT Users, Conference 2004, Prague, Czech Republic, 31 May–4 June 2004. [Google Scholar]
- Naud, C.A.; Mitchell, K.L.; Muller, J.P.; Clothiaux, E.E.; Albert, P.E.; Preusker, R.E.; Fischer, J.U.; Hogan, R.J. Comparison between ATSR-2 stereo, MOS O2-A band and ground-based cloud top heights. Int. J. Remote Sens. 2007, 28, 1969–1987. [Google Scholar] [CrossRef]
- Fisher, D.; Muller, J.P. Stereo Derived Cloud Top Height Climatology over Greenland from 20 Years of the Along Track Scanning Radiometer (ATSR) Instruments; International Society of Photogrammetry & Remote Sensing ISPRS: Melbourne, Australia, 26 August 2012; Available online: https://noa.gwlb.de/servlets/MCRFileNodeServlet/cop_derivate_00025154/isprsarchives-XXXIX-B8-109-2012.pdf (accessed on 6 January 2023).
- Naud, C.; Muller, J.P.; Clothiaux, E.E. Assessment of multispectral ATSR2 stereo cloud-top height retrievals. Remote Sens. Environ. 2006, 104, 337–345. [Google Scholar] [CrossRef]
- Fisher, D.; Muller, J.P.; Yershov, V.N. Automated stereo retrieval of smoke plume injection heights and retrieval of smoke plume masks from AATSR and their assessment with CALIPSO and MISR. IEEE Trans. Geosci. Remote Sens. 2013, 52, 1249–1258. [Google Scholar] [CrossRef]
- Virtanen, T.H.; Kolmonen, P.; Rodríguez, E.; Sogacheva, L.; Sundström, A.M.; de Leeuw, G. Ash plume top height estimation using AATSR. Atmos. Meas. Tech. 2014, 7, 2437–2456. [Google Scholar] [CrossRef]
- Fernandez-Moran, R.; Gómez-Chova, L.; Alonso, L.; Mateo-García, G.; López-Puigdollers, D. Towards a novel approach for Sentinel-3 synergistic OLCI/SLSTR cloud and cloud shadow detection based on stereo cloud-top height estimation. ISPRS J. Photogramm. Remote Sens. 2021, 181, 238–253. [Google Scholar] [CrossRef]
- European Space Agency. Sentinel-3 SLSTR User Guide. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-3-slstr/coverage (accessed on 4 January 2023).
- Polehampton, E.; Cox, C.; Smith, D.; Ghent, D.; Wooster, M.; Xu, W.; Bruniquel, J.; Dransfeld, S. Copernicus Sentinel-3 SLSTR Land User Handbook. Available online: https://sentinel.esa.int/documents/247904/4598082/Sentinel-3-SLSTR-Land-Handbook.pdf (accessed on 4 January 2023).
- NASA. MODIS Specification. Available online: https://modis.gsfc.nasa.gov/about/specifications.php (accessed on 4 January 2023).
- Caseiro, A.; Rücker, G.; Tiemann, J.; Leimbach, D.; Lorenz, E.; Frauenberger, O.; Kaiser, J.W. Persistent Hot Spot Detection and Characterisation Using SLSTR. Remote Sens. 2018, 10, 1118. [Google Scholar] [CrossRef]
- Moroney, C.; Horvath, A.; Davies, R. Use of stereo-matching to coregister multiangle data from MISR. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1541–1546. [Google Scholar] [CrossRef]
- Lin, G.; Wolfe, R.E.; Tilton, J.C.; Zhang, P.; Dellomo, J.J.; Tan, B. (Terra, Aqua) MODIS Geolocation Status. In Proceedings of the October 2018 MODIS Science Team Meeting, Silver Spring, MD, USA, 15–19 October 2018; Available online: https://modis.gsfc.nasa.gov/sci_team/meetings/201810/calibration.php (accessed on 4 September 2019).
- European Space Agency. S3 SLSTR Cyclic Performance Report. Available online: https://sentinels.copernicus.eu/web/sentinel/technical-guides/sentinel-3-slstr/data-quality-reports (accessed on 6 January 2023).
- Fisher, D.; Muller, J.P. Global warping coefficients for improving ATSR co-registration. Remote Sens. Lett. 2013, 4, 151–160. [Google Scholar] [CrossRef]
- Lonitz, K.; Horváth, Á. Comparison of MISR and Meteosat-9 cloud-motion vectors. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef]
- Di Michele, S.; McNally, T.; Bauer, P.; Genkova, I. Quality assessment of cloud-top height estimates from satellite IR radiances using the CALIPSO lidar. IEEE Trans. Geosci. Remote Sens. 2012, 51, 2454–2464. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Graham, R.M.; Hudson, S.R.; Maturilli, M. Improved performance of ERA5 in Arctic gateway relative to four global atmospheric reanalyses. Geophys. Res. Lett. 2019, 46, 6138–6147. [Google Scholar] [CrossRef]
- Rantanen, M.; Karpechko, A.Y.; Lipponen, A.; Nordling, K.; Hyvärinen, O.; Ruosteenoja, K.; Vihma, T.; Laaksonen, A. The Arctic has warmed nearly four times faster than the globe since 1979. Commun. Earth Environ. 2022, 3, 168. [Google Scholar] [CrossRef]
- Liu, Y.; Ackerman, S.A.; Maddux, B.C.; Key, J.R.; Frey, R.A. Errors in cloud detection over the Arctic using a satellite imager and implications for observing feedback mechanisms. J. Clim. 2010, 23, 1894–1907. [Google Scholar] [CrossRef]
- Taylor, P.C.; Boeke, R.C.; Li, Y.; Thompson, D.W. Arctic cloud annual cycle biases in climate models. Atmos. Chem. Phys. 2019, 19, 8759–8782. [Google Scholar] [CrossRef]
- Lenaerts, J.T.; Van Tricht, K.; Lhermitte, S.; L’Ecuyer, T.S. Polar clouds and radiation in satellite observations, reanalyses, and climate models. Geophys. Res. Lett. 2017, 44, 3355–3364. [Google Scholar] [CrossRef]
- Cawkwell, F.G.; Bamber, J.L.; Muller, J.P. Determination of cloud top amount and altitude at high latitudes. Geophys. Res. Lett. 2001, 28, 1675–1678. [Google Scholar] [CrossRef]
- Frey, R.A.; Ackerman, S.A.; Liu, Y.; Strabala, K.I.; Zhang, H.; Key, J.R.; Wang, X. Cloud detection with MODIS. Part I: Improvements in the MODIS cloud mask for collection 5. J. Atmos. Ocean. Technol. 2008, 25, 1057–1072. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Holz, R.E.; Frey, R.; Eloranta, E.W.; Maddux, B.C.; McGill, M. Cloud detection with MODIS. Part II: Validation. J. Atmos. Ocean. Technol. 2008, 25, 1073–1086. [Google Scholar] [CrossRef]
- Baum, B.A.; Menzel, W.P.; Frey, R.A.; Tobin, D.C.; Holz, R.E.; Ackerman, S.; Heidinger, A.; Yang, P. MODIS cloud-top property refinements for collection 6. J. Appl. Meteorol. Climatol. 2012, 51, 1145–1163. [Google Scholar] [CrossRef]
- Liu, Y.; Key, J.R.; Frey, R.A.; Ackerman, S.A.; Menzel, W.P. Nighttime polar cloud detection with MODIS. Remote Sens. Environ. 2004, 92, 181–194. [Google Scholar] [CrossRef]
- Jafariserajehlou, S.; Mei, L.; Vountas, M.; Rozanov, V.; Burrows, J.P.; Hollmann, R. A cloud identification algorithm over the Arctic for use with AATSR–SLSTR measurements. Atmos. Meas. Tech. 2019, 12, 1059–1076. [Google Scholar] [CrossRef]
- Pithan, F.; Svensson, G.; Caballero, R.; Chechin, D.; Cronin, T.W.; Ekman, A.M.; Neggers, R.; Shupe, M.D.; Solomon, A.; Tjernström, M.; et al. Role of air-mass transformations in exchange between the Arctic and mid-latitudes. Nat. Geosci. 2018, 11, 805–812. [Google Scholar] [CrossRef]
- Available online: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/ESA_selects_Harmony_as_tenth_Earth_Explorer_mission (accessed on 11 April 2023).
- Ciani, D.; Sabatini, M.; Buongiorno Nardelli, B.; Lopez Dekker, P.; Rommen, B.; Wethey, D.S.; Yang, C.; Liberti, G.L. Sea Surface Temperature Gradients Estimation Using Top-of-Atmosphere Observations from the ESA Earth Explorer 10 Harmony Mission: Preliminary Studies. Remote Sens. 2023, 15, 1163. [Google Scholar] [CrossRef]
- Kelly, M.A.; Carr, J.L.; Wu, D.L.; Goldberg, A.C.; Papusha, I.; Meinhold, R.T. Compact Midwave Imaging System: Results from an Airborne Demonstration. Remote Sens. 2022, 14, 834. [Google Scholar] [CrossRef]
- Available online: https://www.space.commerce.gov/business-with-noaa/future-noaa-satellite-architecture/ (accessed on 11 April 2023).
- Nelson, D.L.; Garay, M.J.; Kahn, R.A.; Dunst, B.A. Stereoscopic height and wind retrievals for aerosol plumes with the MISR INteractive eXplorer (MINX). Remote Sens. 2013, 5, 4593–4628. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SLSTR 1 | MODIS 2 | ||||
|---|---|---|---|---|---|
| Channel | Center Wavelength (μm) | Nadir Sampling (km) | Channel | Wavelength Band (μm) | Nadir Sampling (km) |
| S1 | 0.554 | 0.5 | 4 | 0.545–0.565 | 0.5 |
| S2 | 0.659 | 0.5 | 1 | 0.620–0.670 | 0.25 |
| S3 | 0.868 | 0.5 | 2 | 0.841–0.876 | 0.25 |
| S4 | 1.375 | 0.5 | 26 | 1.360–1.390 | 1.0 |
| S5 | 1.613 | 0.5 | 6 | 1.628–1.652 | 0.5 |
| S6 | 2.256 | 0.5 | 7 | 2.105–2.155 | 0.5 |
| S7, F1 | 3.742 | 1.0 | 22 | 3.660–3.840 | 1.0 |
| S8, F2 | 10.854 | 1.0 | 31 | 10.780–11.280 | 1.0 |
| S9 | 12.023 | 1.0 | 32 | 11.770–12.270 | 1.0 |
| Stereo-Wind Case | Ground Points | CALIOP | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Case | Pole | Date | Band | N | μ(h) m | σ(h) m | N | μ(h) m | σ(h) m |
| 3A | N | 21 December 2021 | LWIR | 24,702 | −1.6 | 206.0 | 339 | 322.6 | 459.4 |
| 3B | N | 21 December 2021 | LWIR | 44,317 | 12.3 | 153.7 | 417 | 240.3 | 415.3 |
| 3A | S | 21 December 2021 | LWIR | 15,252 | −0.9 | 275.9 | 276 | 114.6 | 501.5 |
| 3B | S | 21 December 2021 | LWIR | 26,308 | 21.0 | 170.4 | 647 | −28.0 | 463.4 |
| 3A | N | 9 July 2021 | LWIR | 7726 | 2.3 | 236.0 | 514 | 53.5 | 469.7 |
| 3B | N | 9 July 2021 | LWIR | 17,451 | 24.4 | 163.5 | 299 | 10.1 | 420.4 |
| 3A | S | 9 July 2021 | LWIR | 23,501 | 0.4 | 251.5 | 88 | 352.0 | 549.5 |
| 3B | S | 9 July 2021 | LWIR | 31,642 | −0.52 | 197.0 | 242 | 346.4 | 355.9 |
| 3B | S | 21 December 2021 | VIS | 63,943 | 8.3 | 145.4 | 746 | −31.5 | 435.2 |
| 3B | N | 21 December 2021 | MWIR | 36,547 | 8.5 | 170.5 | 284 | 189.1 | 413.3 |
| Stereo-Wind Case | Ground Points | ERA5 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case | Pole | Date | Band | N | μ(Vu) m/s | σ(Vu) m/s | μ(Vv) m/s | σ(Vv) m/s | N | μ(ΔVu) m/s | σ(ΔVu) m/s | μ(ΔVv) m/s | σ(ΔVv) m/s |
| 3A | N | 21 December 2021 | LWIR | 24,702 | −0.02 | 0.23 | 0.03 | 0.18 | 45,337 | 0.80 | 3.53 | 0.94 | 3.66 |
| 3B | N | 21 December 2021 | LWIR | 44,317 | −0.01 | 0.22 | 0.00 | 0.22 | 275,131 | −0.17 | 3.30 | 0.21 | 3.15 |
| 3A | S | 21 December 2021 | LWIR | 15,252 | 0.00 | 0.25 | 0.10 | 0.26 | 69,251 | 0.53 | 3.65 | −0.72 | 3.52 |
| 3B | S | 21 December 2021 | LWIR | 26,308 | −0.05 | 0.23 | 0.03 | 0.24 | 160,300 | 0.40 | 2.91 | −0.32 | 2.86 |
| 3A | N | 9 July 2021 | LWIR | 7726 | 0.06 | 0.23 | 0.05 | 0.22 | 68,339 | 0.44 | 3.36 | 0.65 | 3.33 |
| 3B | N | 9 July 2021 | LWIR | 17,451 | 0.05 | 0.24 | −0.05 | 0.22 | 94,714 | −0.20 | 3.20 | −0.82 | 3.73 |
| 3A | S | 9 July 2021 | LWIR | 23,501 | −0.03 | 0.26 | 0.10 | 0.28 | 87,784 | 0.59 | 3.66 | 0.15 | 3.44 |
| 3B | S | 9 July 2021 | LWIR | 31,642 | 0.03 | 0.23 | 0.00 | 0.24 | 110,322 | 0.19 | 3.00 | 0.03 | 3.64 |
| 3B | S | 21 December 2021 | VIS | 63,943 | −0.01 | 0.18 | 0.03 | 0.18 | 250,146 | 0.42 | 3.18 | −0.25 | 2.95 |
| 3B | N | 21 December 2021 | MWIR | 36,547 | 0.01 | 0.23 | −0.01 | 0.23 | 57,285 | −1.31 | 4.31 | −1.49 | 5.13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carr, J.L.; Wu, D.L.; Friberg, M.D.; Summers, T.C. Multi-LEO Satellite Stereo Winds. Remote Sens. 2023, 15, 2154. https://doi.org/10.3390/rs15082154
Carr JL, Wu DL, Friberg MD, Summers TC. Multi-LEO Satellite Stereo Winds. Remote Sensing. 2023; 15(8):2154. https://doi.org/10.3390/rs15082154
Chicago/Turabian StyleCarr, James L., Dong L. Wu, Mariel D. Friberg, and Tyler C. Summers. 2023. "Multi-LEO Satellite Stereo Winds" Remote Sensing 15, no. 8: 2154. https://doi.org/10.3390/rs15082154
APA StyleCarr, J. L., Wu, D. L., Friberg, M. D., & Summers, T. C. (2023). Multi-LEO Satellite Stereo Winds. Remote Sensing, 15(8), 2154. https://doi.org/10.3390/rs15082154