



A Novel Atmospheric Correction for Turbid Water Remote Sensing



Abstract
1. Introduction

2. Dataset and Methods
2.1. Satellite Data
2.2. Field Spectral Data
2.3. Methods
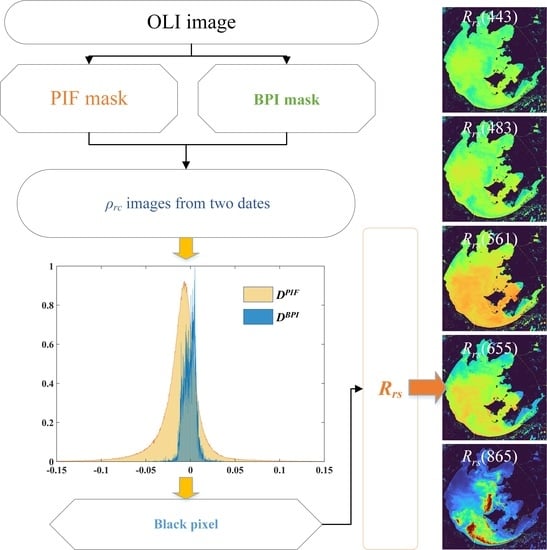
2.3.1. The m-ACZI Algorithm
- (1)
- We extracted the PIF mask according to Schott et al., 1988 [17] and Concha and Schott 2016 [16]. For Lake Taihu, the 2201 nm band with a threshold of 0.05 was used to obtain the water mask, and the threshold of the NIR/RED band ratio was set to 1.3 for obtaining the vegetation mask. The previous two masks were combined using logic. AND. gate, creating a “PIF mask” that rejects the vegetation and water and only accepts the construction land features.
- (2)
- In this step, we calculated the ρrc and t using the 6SV-LUT from ACOLITE (atmospheric correction for OLI lite).
- (3)
- Based on step 2, we adopted the BPI [12] to obtain the BPI mask, and the threshold of the BPI was set to 0~0.1.
- (4)
- Following steps 1, 2, and 3, concerning t values, two images with similar t values were selected to obtain their PIF mask and BPI mask, respectively. Then, these masks were applied to the ρrc (SWIR) images, respectively, to obtain the PIF and BPI images. We subtracted two of each image type to obtain the DPIF and DBPI images.
- (5)
- We counted the average value of DPIF and used the average DPIF with 10% variation as the judgment value for DBPI, i.e., DBPI pixels greater than the average DPIF with 10% variation were discarded.
- (6)
- Following the ACZI process [12], we counted the median value from the final retained DBPI pixels, and this median value was taken as ρa on two SWIR bands. The aerosol scattering ratio (ε), consisting of these two ρa(SWIR) values, was applied to all water pixels, and aerosol scattering in the visible and near-infrared bands was obtained using an exponential extrapolation method, thus completing the final atmospheric correction process to obtain Rrs.
2.3.2. Other Atmospheric Correction Algorithms
The SeaDAS-SWIR Algorithm
The EXP Algorithm
The DSF Algorithm
2.3.3. Algorithm Accuracy Analysis
3. Results
3.1. Assessment of the m-ACZI Algorithm
3.2. Comparison with other AC Algorithms
3.3. Assessment of AC Algorithms for Different Water Types
4. Discussion
4.1. The Assumption of the Spatially Uniformity Distribution of Aerosol Types
4.2. The Black Pixels from Two Date Images Overlap
4.3. The m-ACZI Algorithm Depends on Pure Pixels
4.4. The Impact of Δt on DPIF
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, C.; Carder, K.L.; Muller-Karger, F.E. Atmospheric Correction of SeaWiFS Imagery over Turbid Coastal Waters. Remote Sens. Environ. 2000, 74, 195–206. [Google Scholar] [CrossRef]
- Ruddick, K.G.; Ovidio, F.; Rijkeboer, M. Atmospheric correction of SeaWiFS imagery for turbid coastal and inland waters. Appl. Opt. 2000, 39, 897–912. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Chen, C. A new approach for atmospheric correction of MODIS imagery in turbid coastal waters: A case study for the Pearl River Estuary. Remote Sens. Lett. 2014, 5, 249–257. [Google Scholar] [CrossRef]
- Wang, J.; Lee, Z.; Wang, D.; Shang, S.; Wei, J.; Gilerson, A. Atmospheric correction over coastal waters with aerosol properties constrained by multi-pixel observations. Remote Sens. Environ. 2021, 265, 112633. [Google Scholar] [CrossRef]
- IOCCG. Atmospheric Correction for Remotely-Sensed OceanColour Products; International Ocean Colour Coordinating Group: Dartmouth, NS, Canada, 2010. [Google Scholar]
- Wang, M.; Gordon, H.R. A Simple, Moderately Accurate, Atmospheric correction algorithn for SeaWiFS. Remote Sens. Environ. 1994, 50, 231–239. [Google Scholar] [CrossRef]
- Gordon, H.R.; Menghua, W. Influence of oceanic whitecaps on atmospheric correction of ocean-color sensors. Appl. Opt. 1994, 33, 7754–7763. [Google Scholar] [CrossRef]
- Gordon, H.R.; Clark, D.K. Clear Water Radiance for Atmospheric Correction of Coastal Zone Color Scanner Imegery. Appl. Opt. 1981, 20, 4175–4226. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W. The NIR-SWIR combined atmospheric correction approach for MODIS ocean color data processing. Opt. Express 2007, 24, 15722–15733. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W. Estimation of ocean contribution at the MODIS near-infrared wavelengths along the east coast of the U.S.: Two case studies. Geophys. Res. Lett. 2005, 32, L13606. [Google Scholar] [CrossRef]
- Wang, M. Remote sensing of the ocean contributions from ultraviolet to near-infrared using the shortwave infrared bands: Simulations. Appl. Opt. 2007, 46, 1535–1547. [Google Scholar] [CrossRef]
- Wang, D.; Ma, R.; Xue, K.; Li, J. Improved atmospheric correction algorithm for Landsat 8–OLI data in turbid waters: A case study for the Lake Taihu, China. Opt. Express 2019, 27, A1400–A1418. [Google Scholar] [CrossRef]
- Shi, W.; Wang, M. An assessment of the black ocean pixel assumption for MODIS SWIR bands. Remote Sens. Environ. 2009, 113, 1587–1597. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Turbid wakes associated with offshore wind turbines observed with Landsat 8. Remote Sens. Environ. 2014, 145, 105–115. [Google Scholar] [CrossRef]
- Wang, D.; Ma, R.; Xue, K.; Loiselle, S. The Assessment of Landsat-8 OLI Atmospheric Correction Algorithms for Inland Waters. Remote Sens. 2019, 11, 169. [Google Scholar] [CrossRef]
- Concha, J.A.; Schott, J.R. Retrieval of color producing agents in Case 2 waters using Landsat 8. Remote Sens. Environ. 2016, 185, 95–107. [Google Scholar] [CrossRef]
- Schott, J.R.; Salvaggio, C.; Volchok, W.J. Radiometric scene normalization using pseudoinvariant features. Remote Sens. Environ. 1988, 26, 1–16. [Google Scholar] [CrossRef]
- Hu, C.; Lee, Z.; Ma, R.; Yu, K.; Li, D.; Shang, S. Moderate Resolution Imaging Spectroradiometer (MODIS) observations of cyanobacteria blooms in Taihu Lake, China. J. Geophys. Res. 2010, 115, C04002. [Google Scholar] [CrossRef]
- Hu, C. A novel ocean color index to detect floating algae in the global oceans. Remote Sens. Environ. 2009, 113, 2118–2129. [Google Scholar] [CrossRef]
- Shen, M.; Duan, H.; Cao, Z.; Xue, K.; Qi, T.; Ma, J.; Liu, D.; Song, K.; Huang, C.; Song, X. Sentinel-3 OLCI observations of water clarity in large lakes in eastern China: Implications for SDG 6.3.2 evaluation. Remote Sens. Environ. 2020, 247, 111950. [Google Scholar] [CrossRef]
- Xue, K.; Ma, R.; Shen, M.; Li, Y.; Duan, H.; Cao, Z.; Wang, D.; Xiong, J. Variations of suspended particulate concentration and composition in Chinese lakes observed from Sentinel-3A OLCI images. Sci. Total Environ. 2020, 721, 137774. [Google Scholar] [CrossRef]
- Cao, Z.; Duan, H.; Feng, L.; Ma, R.; Xue, K. Climate- and human-induced changes in suspended particulate matter over Lake Hongze on short and long timescales. Remote Sens. Environ. 2017, 192, 98–113. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Chen, X.; Tian, L.; Chen, L. Human induced turbidity changes in Poyang Lake between 2000 and 2010: Observations from MODIS. J. Geophys. Res. Ocean. 2012, 117, C07006. [Google Scholar] [CrossRef]
- Mueller, J.L.; Fargion, G.S.; Charles, R.; McClain, C.R. Biogeochemical and bio-optical measurements and data analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 5; Tech, N., Ed.; NASA Tech: Washington, DC, USA, 2003; Volume V. [Google Scholar]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar]
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of metre-scale optical satellite data for inland and coastal water applications. Remote Sens. Environ. 2018, 216, 586–597. [Google Scholar] [CrossRef]
- Vermote, E.F.; Member, I.; Tan, D.; Deuze, J.L.; Herman, M. Second Simulation of the Satellite Signal in the Solar Spectrum, 6s: An Overview. IEEE Trans. Geosci. Remote Sens. 1997, 35, 675–687. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Advantages of high quality SWIR bands for ocean colour processing: Examples from Landsat-8. Remote Sens. Environ. 2015, 161, 89–106. [Google Scholar] [CrossRef]
- He, X.; Bai, Y.; Pan, D.; Tang, J.; Wang, D. Atmospheric correction of satellite ocean color imagery using the ultraviolet wavelength for highly turbid waters. Opt. Express 2012, 20, 20754–20770. [Google Scholar] [CrossRef]
- Hale, G.M.; Querry, M.R. Optical constants of water in the 200 nm to 200 µm wavelength region. Appl. Opt. 1973, 12, 555–563. [Google Scholar] [CrossRef]
- Vanhellemont, Q. Adaptation of the dark spectrum fitting atmospheric correction for aquatic applications of the Landsat and Sentinel-2 archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of Sentinel-3/OLCI data for mapping of suspended particulate matter and chlorophyll-a concentration in Belgian turbid coastal waters. Remote Sens. Environ. 2021, 256, 112284. [Google Scholar] [CrossRef]
- Vanhellemont, Q. ACOLITE processing for Sentinel-2 and Landsat-8 atmospheric correction and aquatic applications. In Proceedings of the 2016 Ocean Optics Conference, Victoria, BC, Canada, 23–28 October 2016. [Google Scholar]
- Sun, D.; Li, Y.; Wang, Q.; Le, C.; Lv, H.; Huang, C.; Gong, S. Specific inherent optical quantities of complex turbid inland waters, from the perspective of water classification. Photochem. Photobiol Sci. 2012, 11, 1299–1312. [Google Scholar] [CrossRef] [PubMed]
- IOCCG. Uncertainties in Ocean Colour Remote Sensing; International Ocean Colour Coordinating Group: Dartmouth, NS, Canada, 2019. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | 443 | 483 | 561 | 655 | 865 | |
|---|---|---|---|---|---|---|
| m-ACZI | RMSE(sr−1) | 0.0063 | 0.0062 | 0.0111 | 0.0082 | 0.0228 |
| sMAPE(%) | 30.71 | 23.01 | 21.41 | 21.27 | 48.31 | |
| Bias(%) | 52.07 | 7.59 | −16.48 | −11.65 | 88.83 | |
| ACZI | RMSE(sr−1) | 0.0070 | 0.0076 | 0.0146 | 0.0102 | 0.0203 |
| sMAPE(%) | 35.88 | 34.07 | 29.16 | 29.10 | 57.48 | |
| Bias(%) | −8.91 | −12.32 | −22.70 | −16.18 | 94.16 |
| Method | 443 | 483 | 561 | 655 | 865 | |
|---|---|---|---|---|---|---|
| m-ACZI | RMSE(sr−1) | 0.0063 | 0.0062 | 0.0111 | 0.0082 | 0.0228 |
| sMAPE(%) | 30.71 | 23.01 | 21.41 | 21.27 | 48.31 | |
| Bias(%) | 52.07 | 7.59 | −16.48 | −11.65 | 88.83 | |
| SeaDAS-SWIR | RMSE(sr−1) | 0.0113 | 0.0100 | 0.0108 | 0.0104 | 0.0134 |
| (n = 54) | sMAPE(%) | 45.11 | 32.70 | 20.65 | 27.33 | 76.35 |
| Bias(%) | 33.32 | 13.36 | −1.38 | 4.37 | 126.68 | |
| EXP | RMSE(sr−1) | 0.0060 | 0.0070 | 0.0150 | 0.0105 | 0.0217 |
| sMAPE(%) | 34.12 | 27.76 | 32.79 | 28.29 | 55.56 | |
| Bias(%) | 2.50 | −10.31 | −27.00 | −19.72 | 90.38 | |
| DSF | RMSE(sr−1) | 0.0058 | 0.0061 | 0.0098 | 0.0080 | 0.0244 |
| sMAPE(%) | 32.27 | 24.34 | 17.68 | 21.80 | 63.00 | |
| Bias(%) | 34.22 | 4.94 | −4.46 | 0.01 | 113.55 |
| Method | 443 | 483 | 561 | 655 | 865 | |
|---|---|---|---|---|---|---|
| m-ACZI | RMSE(sr−1) | 0.0058 | 0.0058 | 0.0087 | 0.0072 | 0.0127 |
| (n = 53) | sMAPE(%) | 25.63 | 20.49 | 18.97 | 17.86 | 48.62 |
| Bias(%) | 21.32 | 3.93 | −14.76 | −10.45 | 91.30 | |
| ACZI | RMSE(sr−1) | 0.0071 | 0.0073 | 0.0109 | 0.0085 | 0.0112 |
| (n = 53) | sMAPE(%) | 31.77 | 25.94 | 23.13 | 22.59 | 59.54 |
| Bias(%) | −6.01 | −6.81 | −18.20 | −10.54 | 102.18 | |
| SeaDAS-SWIR | RMSE(sr−1) | 0.0113 | 0.0101 | 0.0107 | 0.0103 | 0.0123 |
| (n = 48) | sMAPE(%) | 44.17 | 31.74 | 20.02 | 26.57 | 74.39 |
| Bias(%) | 30.91 | 11.20 | −2.26 | 2.61 | 119.49 | |
| EXP | RMSE(sr−1) | 0.0058 | 0.0068 | 0.0126 | 0.0093 | 0.0123 |
| (n = 53) | sMAPE(%) | 26.63 | 24.18 | 30.28 | 24.10 | 55.98 |
| Bias(%) | −3.30 | −10.77 | −25.36 | −17.42 | 93.74 | |
| DSF | RMSE(sr−1) | 0.0055 | 0.0058 | 0.0075 | 0.0068 | 0.0144 |
| (n = 53) | sMAPE(%) | 26.92 | 21.81 | 15.16 | 19.31 | 65.51 |
| Bias(%) | 8.72 | 3.16 | −1.85 | 1.95 | 117.79 |
| Method | 443 | 483 | 561 | 655 | 865 | |
|---|---|---|---|---|---|---|
| m-ACZI | RMSE(sr−1) | 0.0078 | 0.0072 | 0.0162 | 0.0107 | 0.0396 |
| (n = 18) | sMAPE(%) | 45.68 | 30.42 | 28.61 | 31.29 | 47.40 |
| Bias(%) | 142.60 | 18.39 | −21.53 | −15.18 | 81.53 | |
| ACZI | RMSE(sr−1) | 0.0067 | 0.0086 | 0.0222 | 0.0140 | 0.0355 |
| (n = 18) | sMAPE(%) | 51.47 | 58.00 | 46.92 | 48.25 | 51.41 |
| Bias(%) | −19.90 | −28.52 | −35.93 | −32.81 | 70.54 | |
| SeaDAS-SWIR | RMSE(sr−1) | 0.0111 | 0.0097 | 0.0115 | 0.0110 | 0.0204 |
| (n = 6) | sMAPE(%) | 52.71 | 40.43 | 25.69 | 33.33 | 92.05 |
| Bias(%) | 52.55 | 30.56 | 5.67 | 18.46 | 184.26 | |
| EXP | RMSE(sr−1) | 0.0067 | 0.0075 | 0.0205 | 0.0134 | 0.0376 |
| (n = 18) | sMAPE(%) | 56.19 | 38.30 | 40.20 | 40.63 | 54.32 |
| Bias(%) | 19.58 | −8.93 | −31.81 | −26.47 | 80.47 | |
| DSF | RMSE(sr−1) | 0.0067 | 0.0070 | 0.0147 | 0.0107 | 0.0416 |
| (n = 18) | sMAPE(%) | 48.00 | 31.78 | 25.10 | 29.13 | 55.60 |
| Bias(%) | 109.31 | 10.17 | −12.16 | −5.71 | 101.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Xiang, X.; Ma, R.; Guo, Y.; Zhu, W.; Wu, Z. A Novel Atmospheric Correction for Turbid Water Remote Sensing. Remote Sens. 2023, 15, 2091. https://doi.org/10.3390/rs15082091
Wang D, Xiang X, Ma R, Guo Y, Zhu W, Wu Z. A Novel Atmospheric Correction for Turbid Water Remote Sensing. Remote Sensing. 2023; 15(8):2091. https://doi.org/10.3390/rs15082091
Chicago/Turabian StyleWang, Dian, Xiangyu Xiang, Ronghua Ma, Yongqin Guo, Wangyuan Zhu, and Zhihao Wu. 2023. "A Novel Atmospheric Correction for Turbid Water Remote Sensing" Remote Sensing 15, no. 8: 2091. https://doi.org/10.3390/rs15082091
APA StyleWang, D., Xiang, X., Ma, R., Guo, Y., Zhu, W., & Wu, Z. (2023). A Novel Atmospheric Correction for Turbid Water Remote Sensing. Remote Sensing, 15(8), 2091. https://doi.org/10.3390/rs15082091