
Vector Road Map Updating from High-Resolution Remote-Sensing Images with the Guidance of Road Intersection Change Detection and Directed Road Tracing



Abstract
1. Introduction
2. Related Work
2.1. Road Extraction
2.1.1. Road Surface Segmentation
2.1.2. Road Centerline Extraction
2.2. Road Map Update
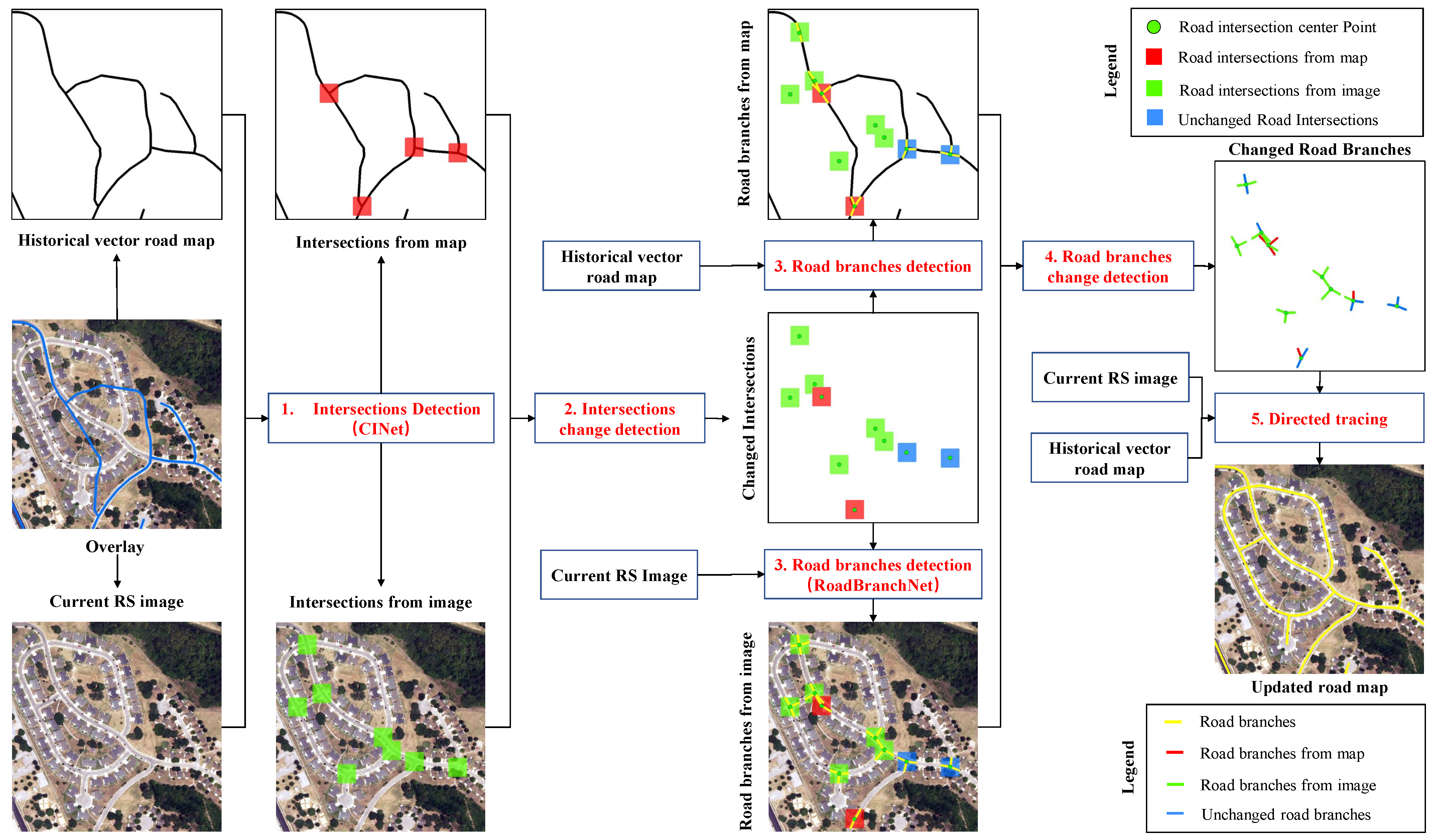
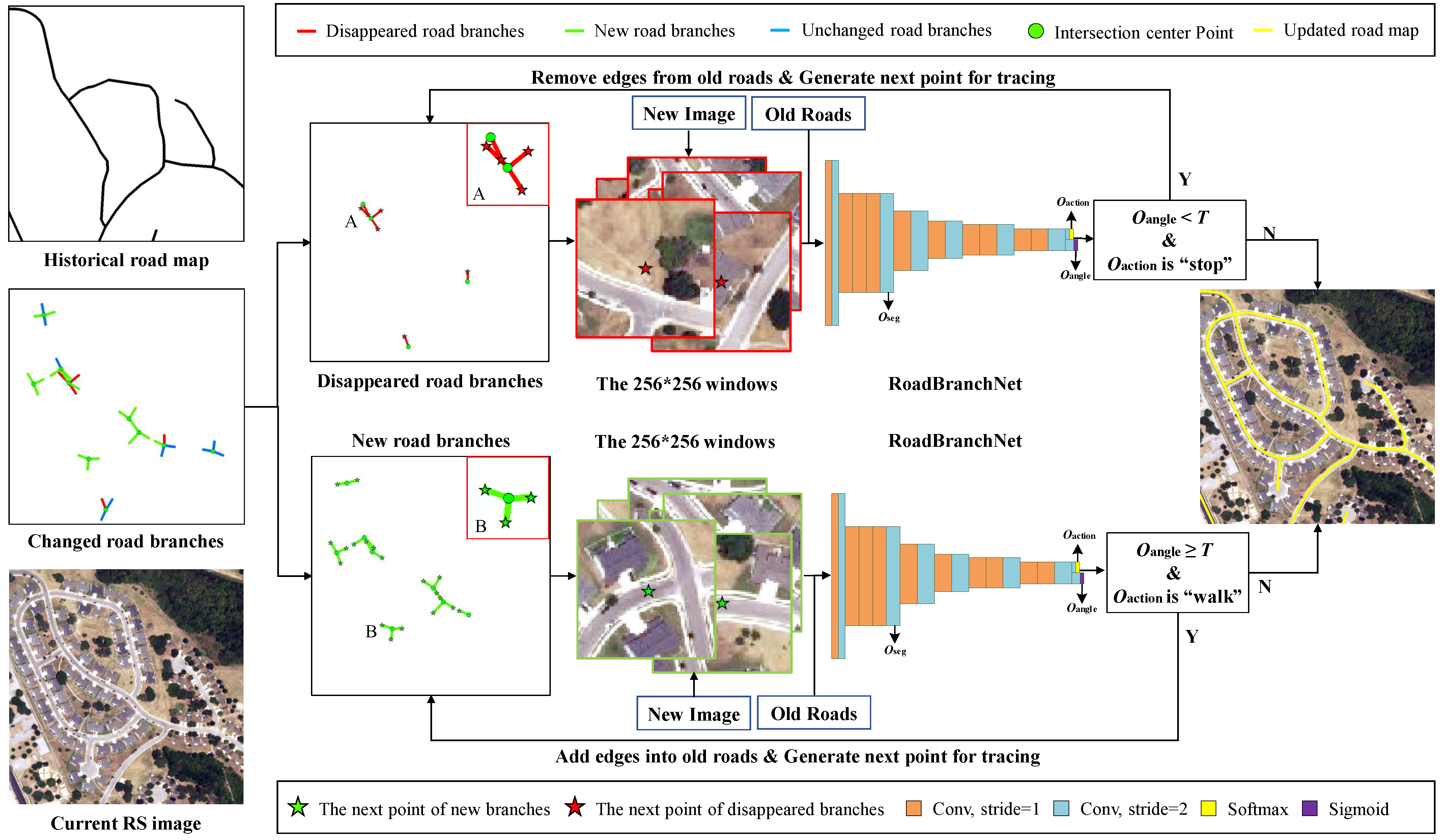
3. Methodology
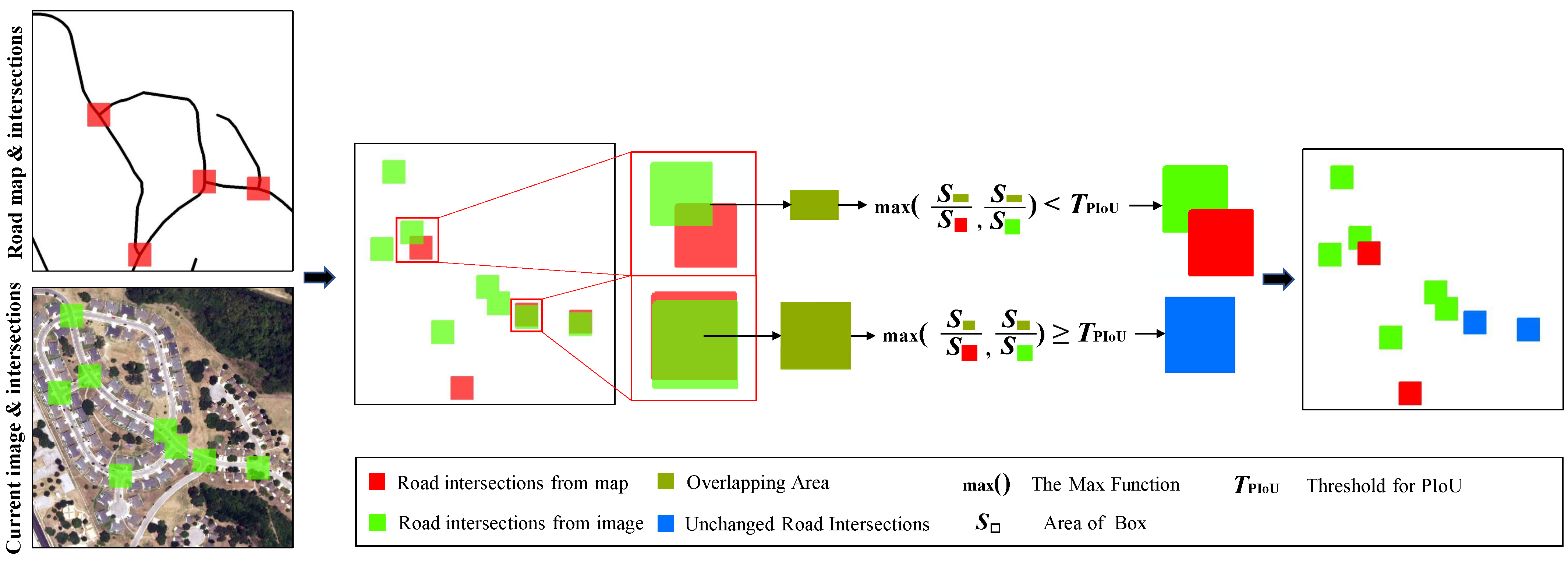
3.1. Road Intersection Change Detection
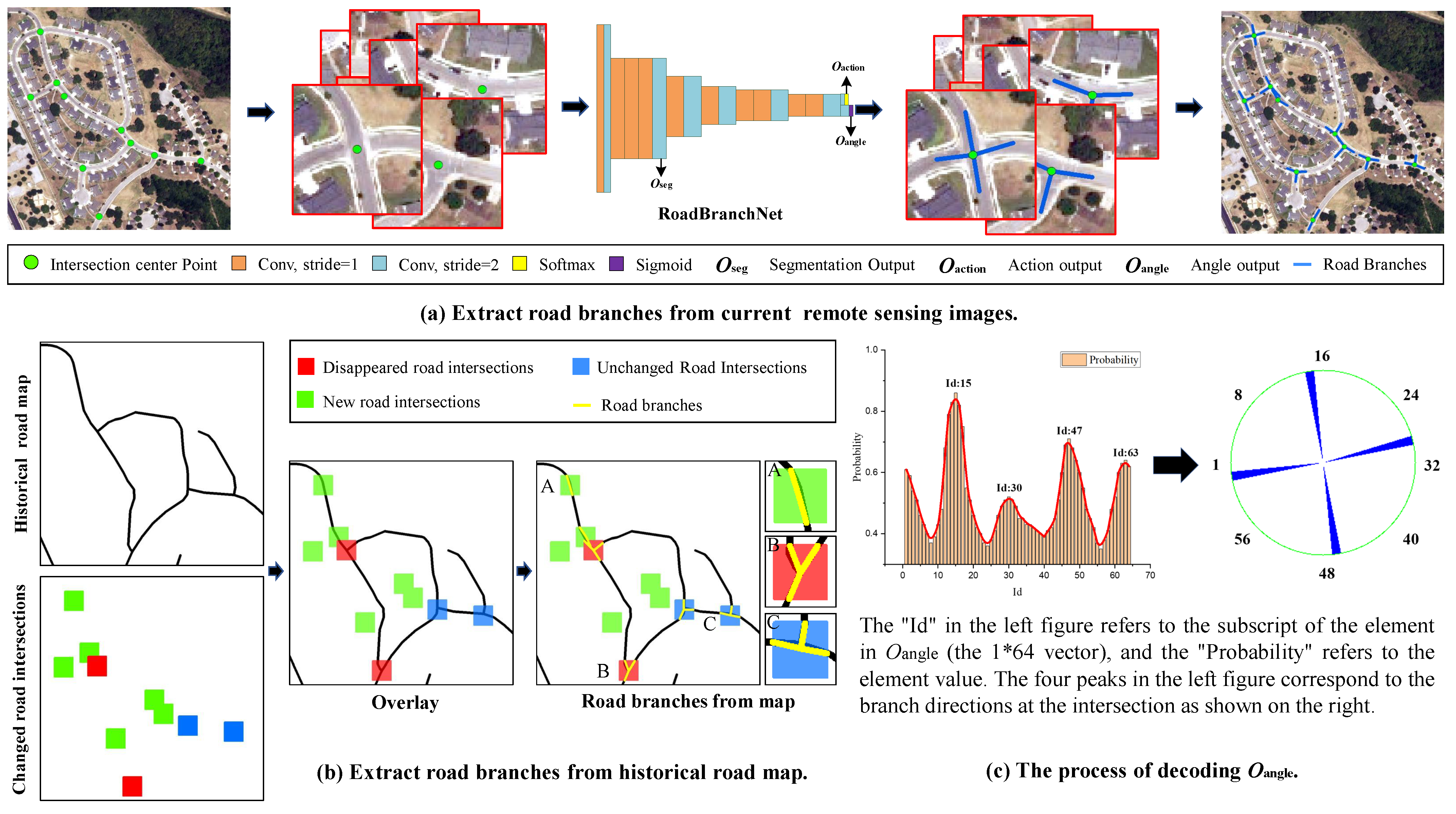
3.2. Road Branch Change Detection
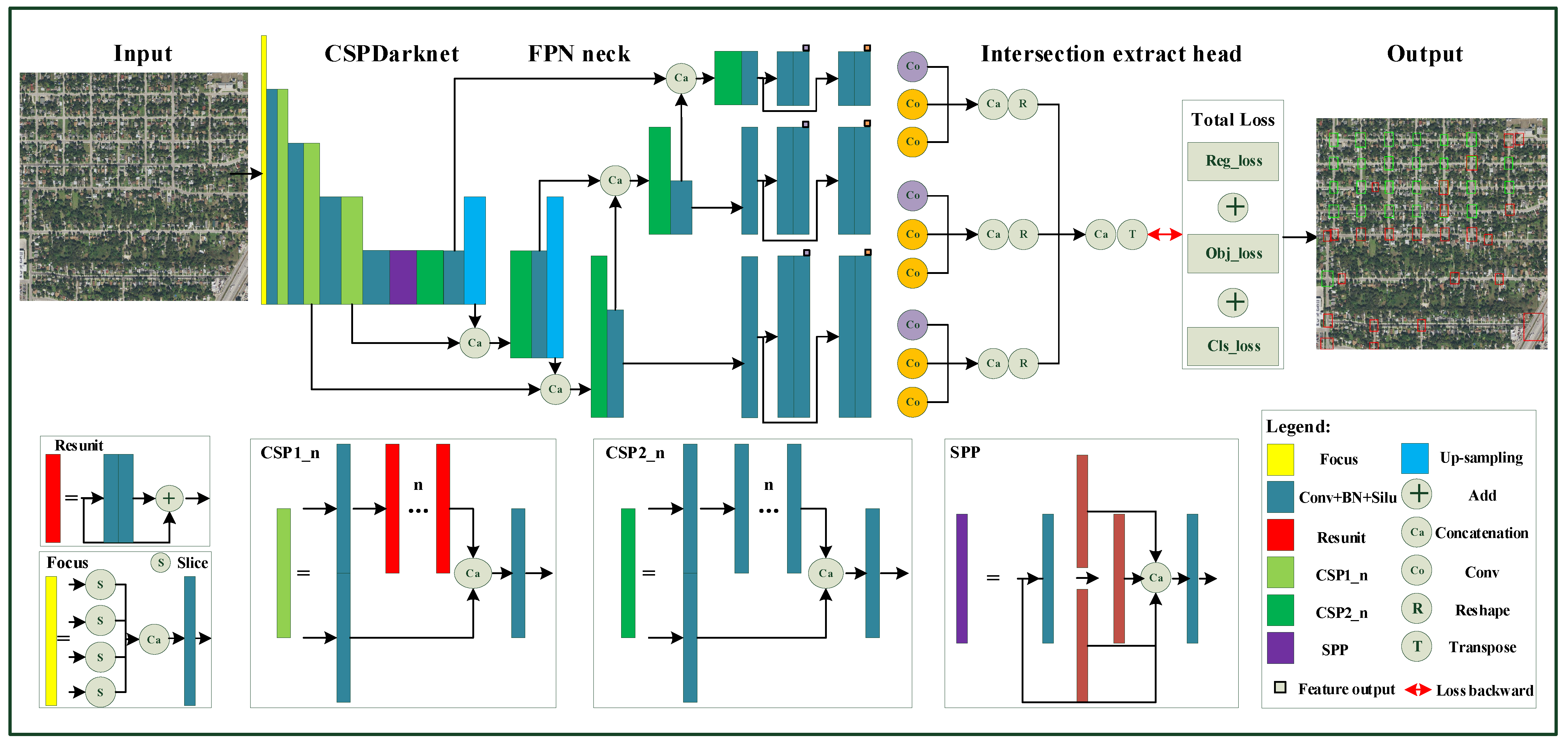
3.2.1. Road Branch Detection
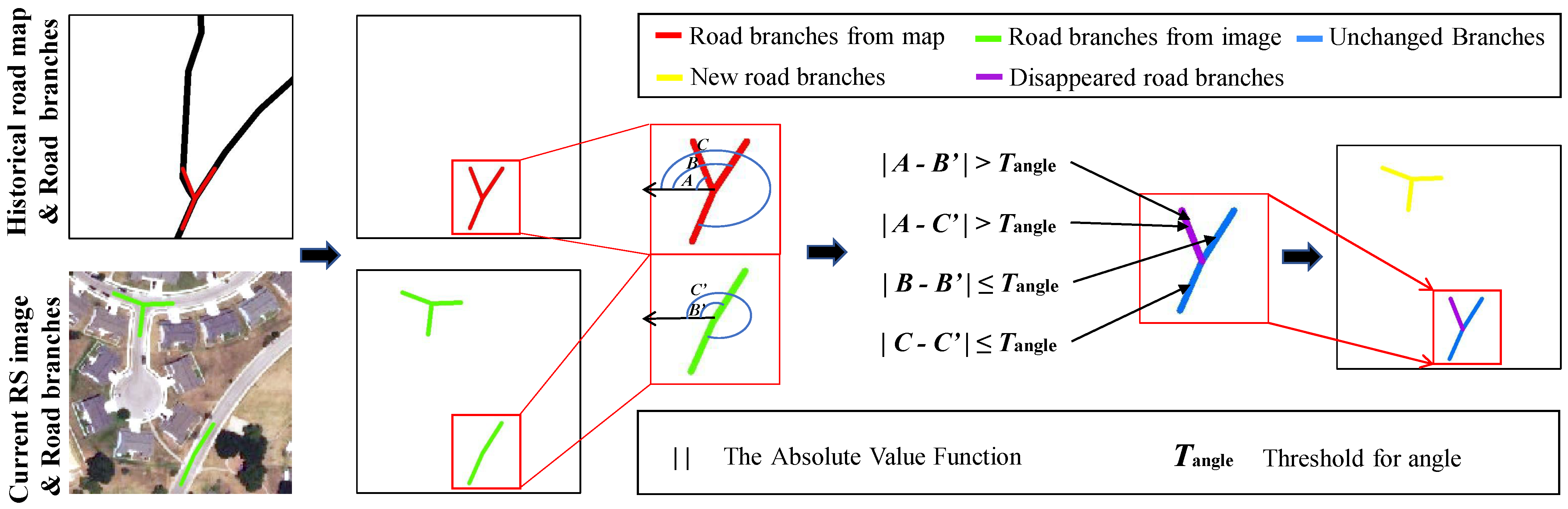
3.2.2. Road Branch Change Detection
3.3. Directed Road Tracing
4. Experiments
4.1. Experimental Setups
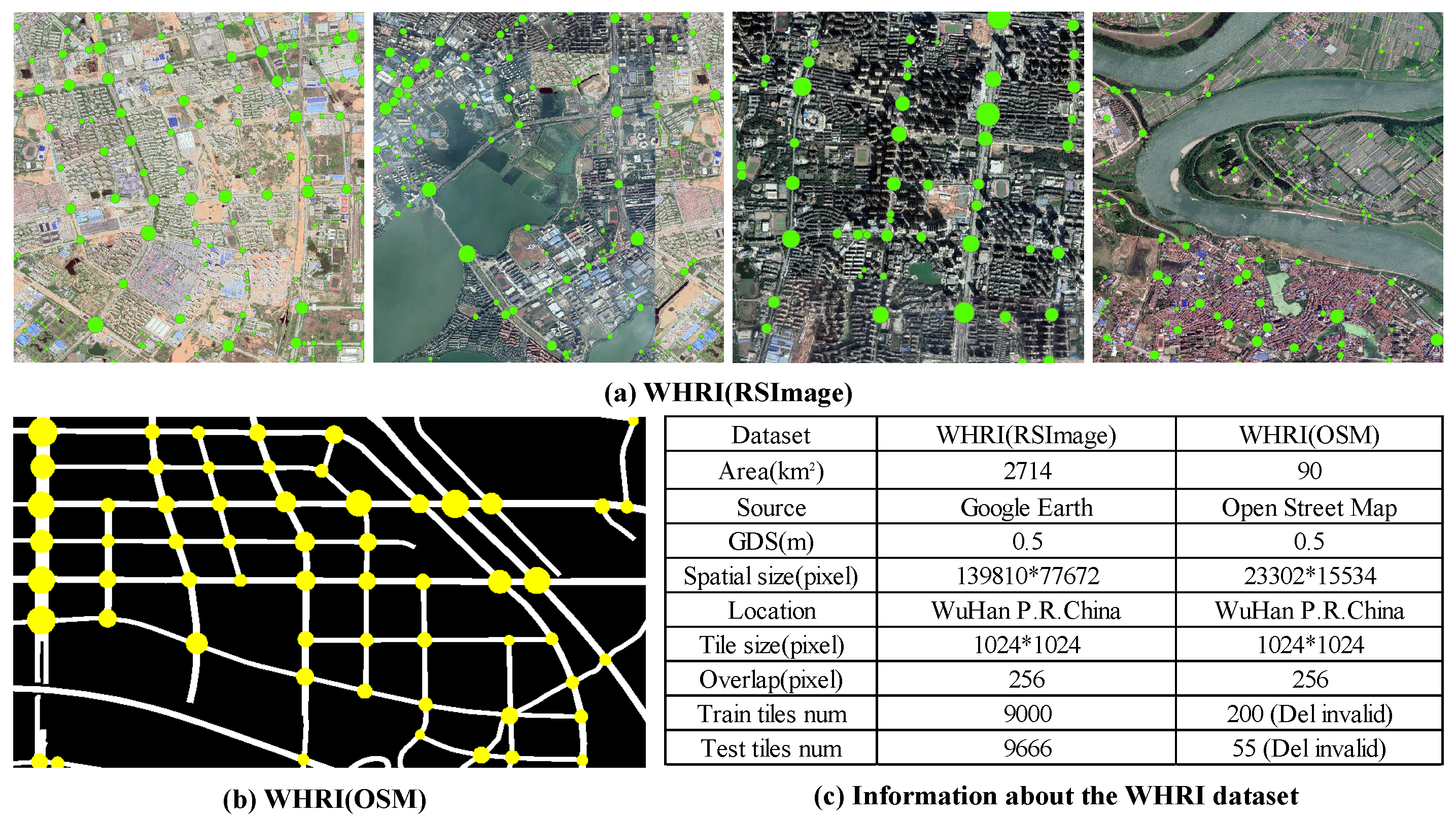
4.1.1. Dataset Description
4.1.2. Implementation Details
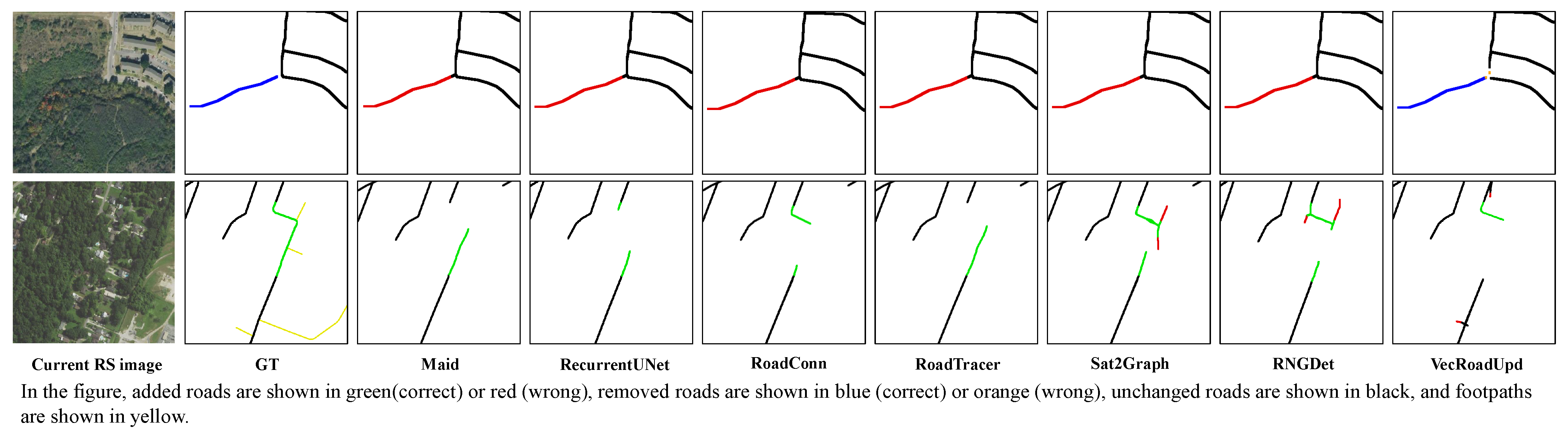
4.1.3. Comparative Methods
4.1.4. Evaluation Metrics
4.2. Experimental Results
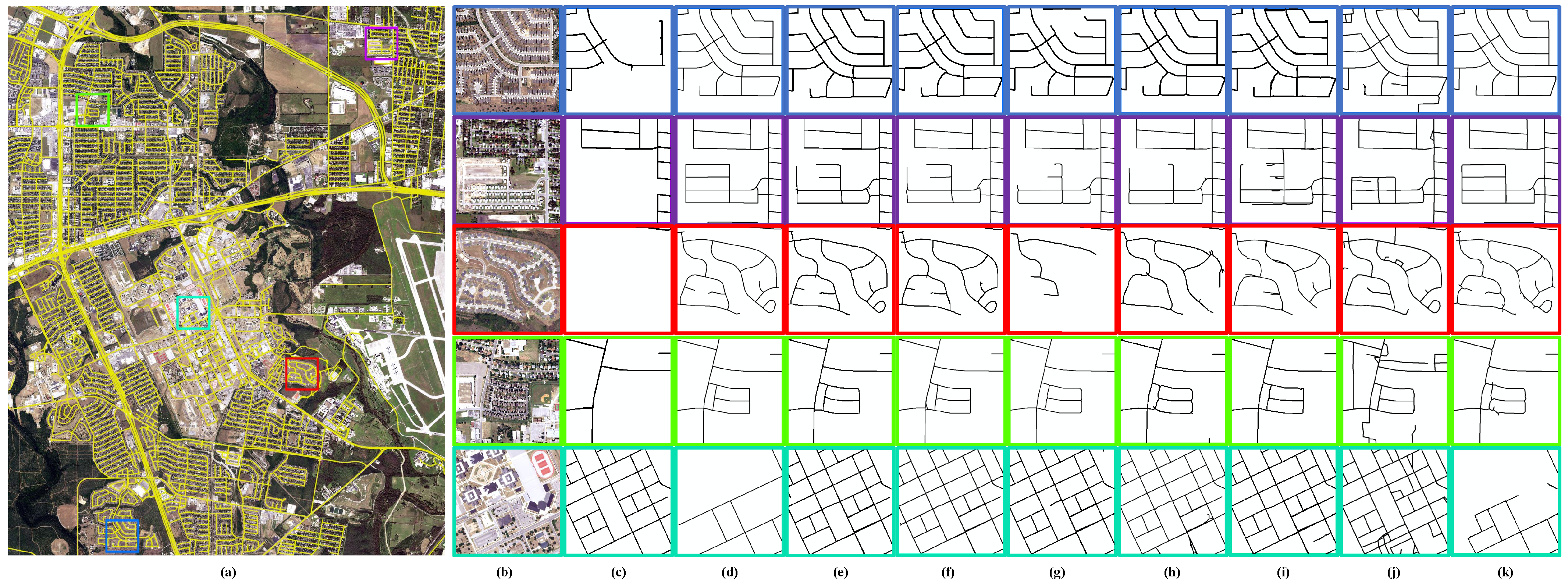
4.2.1. Visual Results on San Antonio
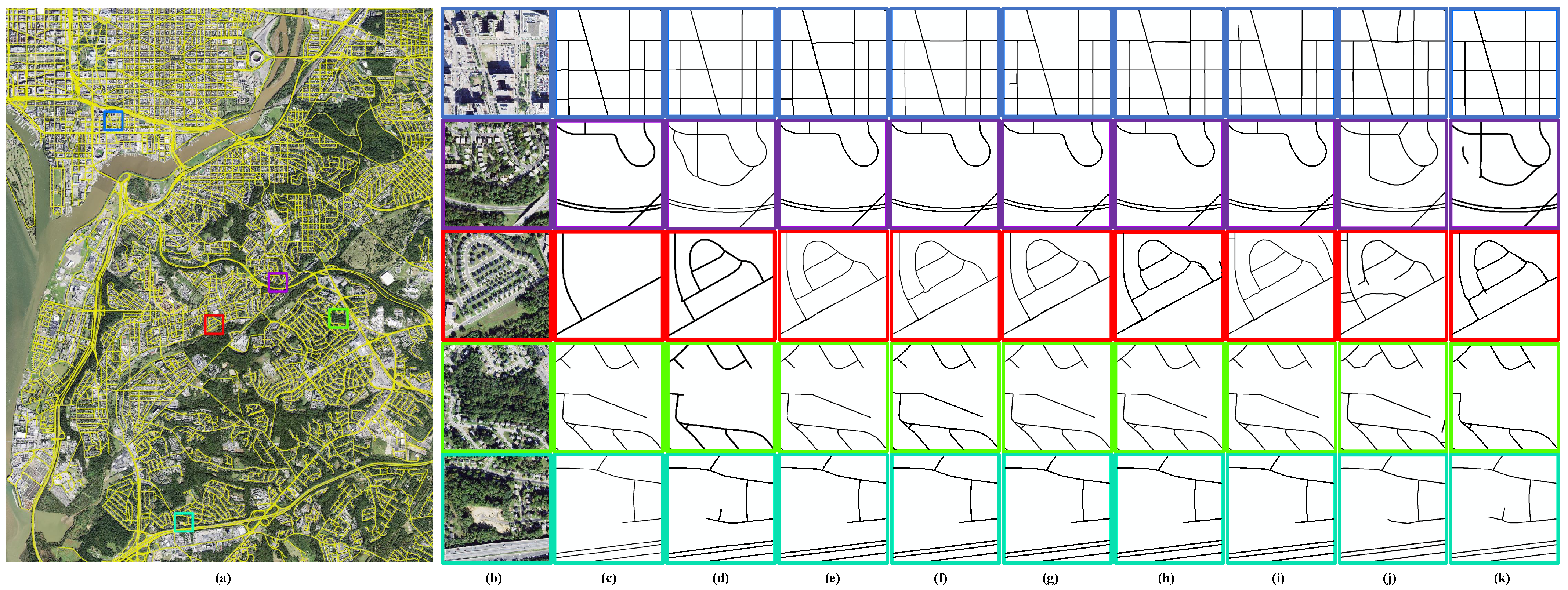
4.2.2. Visual Results on Washington DC
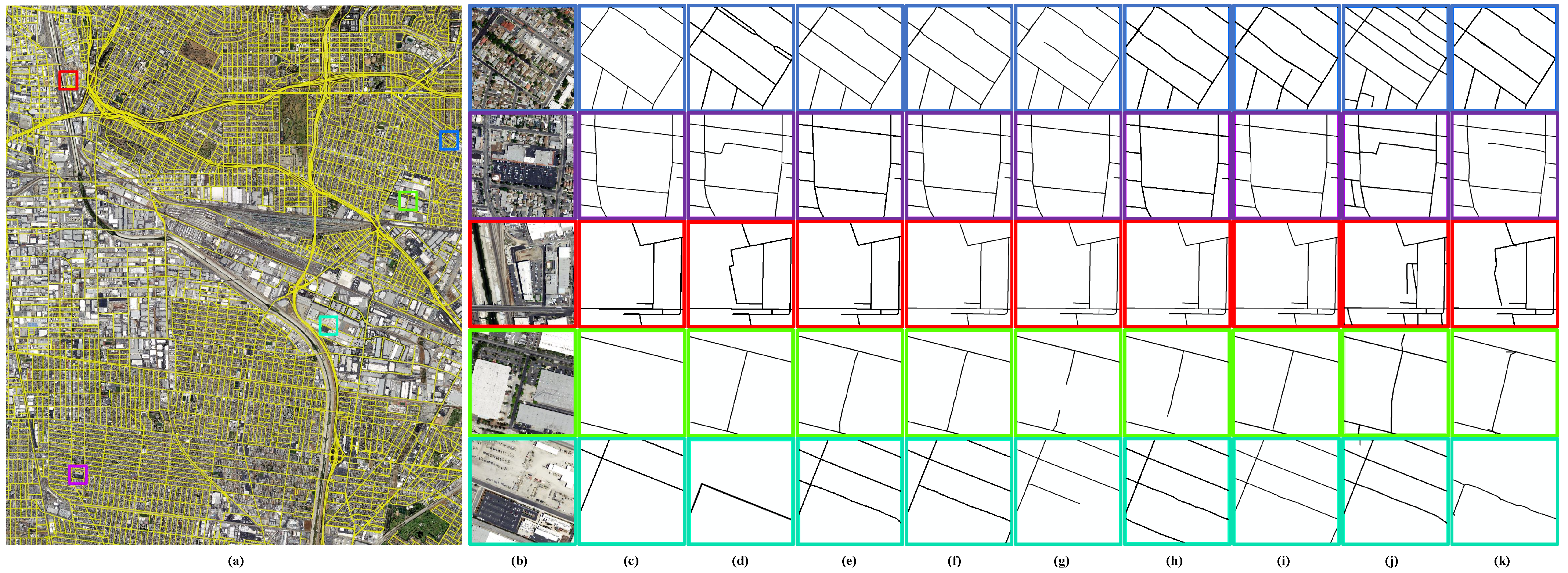
4.2.3. Visual Results on Los Angeles
4.2.4. Quantitative Analysis
5. Parameter Setting and Ablation Analysis
5.1. Influence of
5.2. Influence of
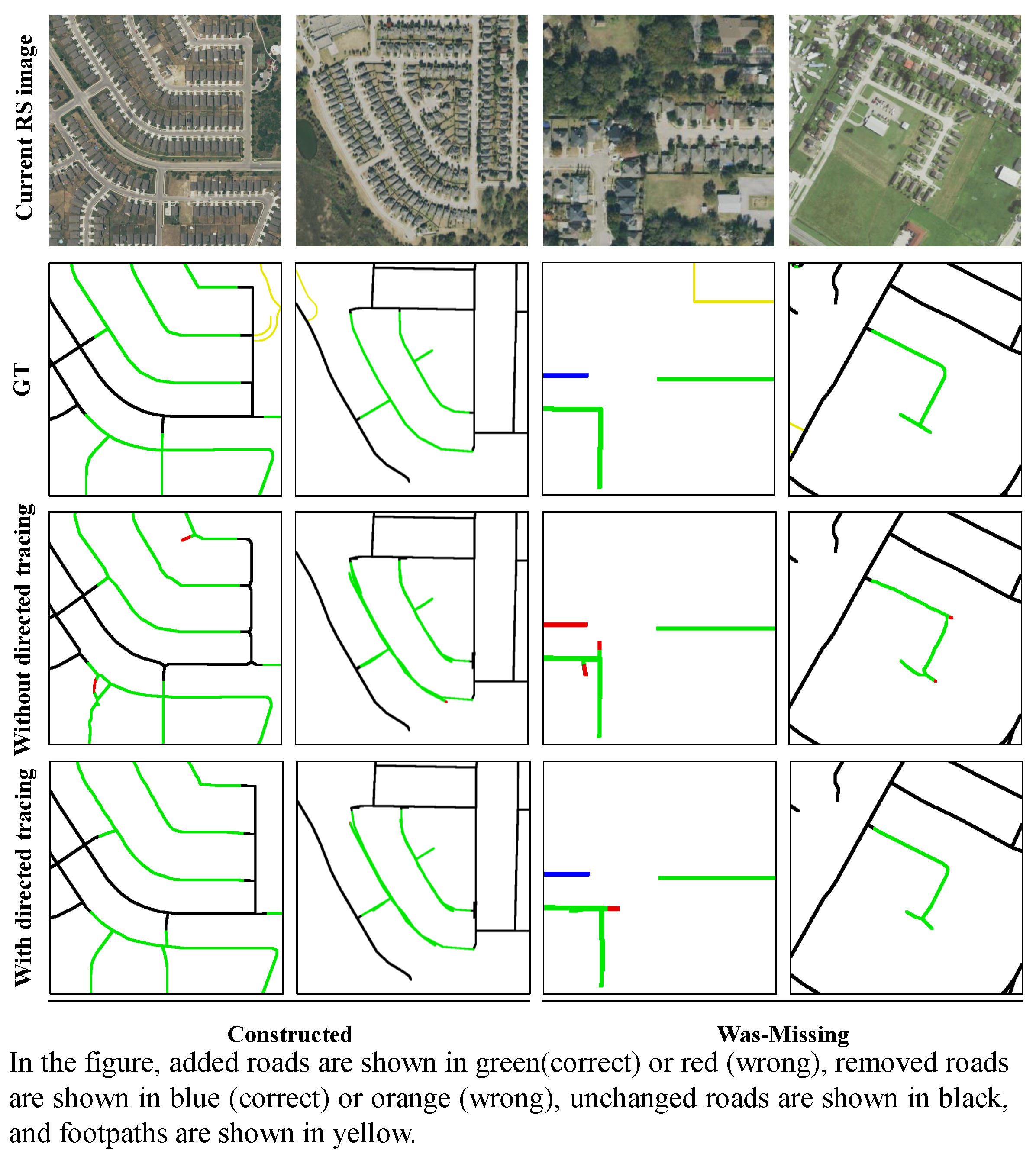
5.3. Influence of Directed Road Tracing
6. Discussion on Failure Cases
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Lian, R.; Huang, L. DeepWindow: Sliding Window Based on Deep Learning for Road Extraction From Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1905–1916. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, Y.; Gan, L.; Sun, Y.; Wu, X.; Liu, M.; Wang, L. RNGDet: Road Network Graph Detection by Transformer in Aerial Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4707612. [Google Scholar] [CrossRef]
- Tan, Y.Q.; Gao, S.H.; Li, X.Y.; Cheng, M.M.; Ren, B. VecRoad: Point-Based Iterative Graph Exploration for Road Graphs Extraction. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 8907–8915. [Google Scholar] [CrossRef]
- Bastani, F.; Madden, S. Beyond Road Extraction: A Dataset for Map Update using Aerial Images. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 11885–11894. [Google Scholar]
- Zhou, M.; Sui, H.; Chen, S.; Chen, X.; Wang, W.; Wang, J.; Liu, J. UGRoadUpd: An Unchanged-Guided Historical Road Database Updating Framework Based on Bi-Temporal Remote Sensing Images. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21465–21477. [Google Scholar] [CrossRef]
- Bastani, F.; He, S.; Abbar, S.; Alizadeh, M.; Balakrishnan, H.; Chawla, S.; Madden, S. Machine-Assisted Map Editing. In Proceedings of the SIGSPATIAL’18: 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 6–9 November 2018; pp. 23–32. [Google Scholar] [CrossRef]
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Guo, Q.; Wang, Z. A Self-Supervised Learning Framework for Road Centerline Extraction from High-Resolution Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4451–4461. [Google Scholar] [CrossRef]
- Dai, J.; Zhu, T.; Wang, Y.; Ma, R.; Fang, X. Road Extraction From High-Resolution Satellite Images Based on Multiple Descriptors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 227–240. [Google Scholar] [CrossRef]
- Ventura, C.; Pont-Tuset, J.; Caelles, S.; Maninis, K.K.; Gool, L.V. Iterative Deep Learning for Road Topology Extraction. arXiv 2018, arXiv:1808.09814. [Google Scholar]
- Cheng, G.; Zhu, F.; Xiang, S.; Pan, C. Road Centerline Extraction via Semisupervised Segmentation and Multidirection Nonmaximum Suppression. IEEE Geosci. Remote Sens. Lett. 2016, 13, 545–549. [Google Scholar] [CrossRef]
- Batra, A.; Singh, S.; Pang, G.; Basu, S.; Jawahar, C.V.; Paluri, M. Improved Road Connectivity by Joint Learning of Orientation and Segmentation. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 10377–10385. [Google Scholar]
- Zhou, G.; Chen, W.; Gui, Q.; Li, X.; Wang, L. Split Depth-Wise Separable Graph-Convolution Network for Road Extraction in Complex Environments From High-Resolution Remote-Sensing Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Unsalan, C.; Sirmacek, B. Road Network Detection Using Probabilistic and Graph Theoretical Methods. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4441–4453. [Google Scholar] [CrossRef]
- Máttyus, G.; Luo, W.; Urtasun, R. DeepRoadMapper: Extracting Road Topology from Aerial Images. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3458–3466. [Google Scholar] [CrossRef]
- Zhu, C.; Shi, W.; Pesaresi, M.; Liu, L.; Chen, X.; King, B. The recognition of road network from high-resolution satellite remotely sensed data using image morphological characteristics. Int. J. Remote Sens. 2005, 26, 5493–5508. [Google Scholar] [CrossRef]
- Liu, R.; Miao, Q.; Song, J.; Quan, Y.; Li, Y.; Xu, P.; Dai, J. Multiscale road centerlines extraction from high-resolution aerial imagery. Neurocomputing 2019, 329, 384–396. [Google Scholar] [CrossRef]
- Belli, D.; Kipf, T. Image-Conditioned Graph Generation for Road Network Extraction. arXiv 2019, arXiv:1910.14388. [Google Scholar]
- Li, X.; Wang, Y.; Zhang, L.; Liu, S.; Mei, J.; Li, Y. Topology-Enhanced Urban Road Extraction via a Geographic Feature-Enhanced Network. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8819–8830. [Google Scholar] [CrossRef]
- Cheng, G.; Wang, Y.; Xu, S.; Wang, H.; Xiang, S.; Pan, C. Automatic Road Detection and Centerline Extraction via Cascaded End-to-End Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3322–3337. [Google Scholar] [CrossRef]
- Shao, Z.; Zhou, Z.; Huang, X.; Zhang, Y. MRENet: Simultaneous Extraction of Road Surface and Road Centerline in Complex Urban Scenes from Very High-Resolution Images. Remote Sens. 2021, 13, 239. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Ye, Y.; Lau, R.Y.K.; Zhang, X.; Huang, X. Road Detection and Centerline Extraction Via Deep Recurrent Convolutional Neural Network U-Net. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7209–7220. [Google Scholar] [CrossRef]
- Bastani, F.; He, S.; Jagwani, S.; Alizadeh, M.; Balakrishnan, H.; Chawla, S.; Madden, S.; Sadeghi, M.A. Updating Street Maps using Changes Detected in Satellite Imagery. In Proceedings of the 29th International Conference on Advances in Geographic Information Systems, Beijing, China, 2–5 November 2021. [Google Scholar]
- Kong, H.; Audibert, J.Y.; Ponce, J. General Road Detection From a Single Image. IEEE Trans. Image Process. 2010, 19, 2211–2220. [Google Scholar] [CrossRef]
- Amo, M.; Martinez, F.; Torre, M. Road extraction from aerial images using a region competition algorithm. IEEE Trans. Image Process. 2006, 15, 1192–1201. [Google Scholar] [CrossRef]
- Fauvel, M.; Chanussot, J.; Benediktsson, J.A.; Sveinsson, J.R. Spectral and spatial classification of hyperspectral data using SVMs and morphological profiles. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 4834–4837. [Google Scholar] [CrossRef]
- Das, S.; Mirnalinee, T.T.; Varghese, K. Use of Salient Features for the Design of a Multistage Framework to Extract Roads from High-Resolution Multispectral Satellite Images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3906–3931. [Google Scholar] [CrossRef]
- Kirthika, A.; Mookambiga, A. Automated road network extraction using artificial neural network. In Proceedings of the 2011 International Conference on Recent Trends in Information Technology (ICRTIT), Chennai, India, 3–5 June 2011; pp. 1061–1065. [Google Scholar] [CrossRef]
- Mokhtarzade, M.; Zoej, M.J.V. Road detection from high-resolution satellite images using artificial neural networks. Int. J. Appl. Earth Obs. Geoinf. 2007, 9, 32–40. [Google Scholar] [CrossRef]
- Wegner, J.D.; Montoya-Zegarra, J.A.; Schindler, K. A Higher-Order CRF Model for Road Network Extraction. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1698–1705. [Google Scholar] [CrossRef]
- Mnih, V.; Hinton, G.E. Learning to Detect Roads in High-Resolution Aerial Images; Springer: Berlin/Heidelberg, Germany, 2010; pp. 210–223. [Google Scholar]
- Zhou, L.; Zhang, C.; Wu, M. D-LinkNet: LinkNet with Pretrained Encoder and Dilated Convolution for High Resolution Satellite Imagery Road Extraction. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 192–1924. [Google Scholar] [CrossRef]
- Zhou, M.; Sui, H.; Chen, S.; Wang, J.; Chen, X. BT-RoadNet: A boundary and topologically-aware neural network for road extraction from high-resolution remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2020, 168, 288–306. [Google Scholar] [CrossRef]
- Zhou, M.; Sui, H.; Chen, S.; Liu, J.; Shi, W.; Chen, X. Large-scale road extraction from high-resolution remote sensing images based on a weakly-supervised structural and orientational consistency constraint network. ISPRS J. Photogramm. Remote Sens. 2022, 193, 234–251. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Chen, L.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 833–851. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Mei, J.; Li, R.J.; Gao, W.; Cheng, M.M. CoANet: Connectivity Attention Network for Road Extraction From Satellite Imagery. IEEE Trans. Image Process. 2021, 30, 8540–8552. [Google Scholar] [CrossRef]
- Shen, Y.; Ai, T.; Yang, M. Extracting Centerlines From Dual-Line Roads Using Superpixel Segmentation. IEEE Access 2019, 7, 15967–15979. [Google Scholar] [CrossRef]
- Xu, Y.; Xie, Z.; Wu, L.; Chen, Z. Multilane roads extracted from the OpenStreetMap urban road network using random forests. Trans. GIS 2019, 23, 224–240. [Google Scholar] [CrossRef]
- Liu, R.; Miao, Q.; Zhang, Y.; Gong, M.; Xu, P. A Semi-Supervised High-Level Feature Selection Framework for Road Centerline Extraction. IEEE Geosci. Remote Sens. Lett. 2020, 17, 894–898. [Google Scholar] [CrossRef]
- Hu, X.; Li, Y.; Shan, J.; Zhang, J.; Zhang, Y. Road Centerline Extraction in Complex Urban Scenes From LiDAR Data Based on Multiple Features. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7448–7456. [Google Scholar] [CrossRef]
- Shi, W.; Miao, Z.; Wang, Q.; Zhang, H. Spectral–Spatial Classification and Shape Features for Urban Road Centerline Extraction. IEEE Geosci. Remote Sens. Lett. 2014, 11, 788–792. [Google Scholar] [CrossRef]
- Ganguli, S.; Garzon, P.; Glaser, N. GeoGAN: A Conditional GAN with Reconstruction and Style Loss to Generate Standard Layer of Maps from Satellite Images. arXiv 2019, arXiv:1902.05611. [Google Scholar]
- Bastani, F.; He, S.; Abbar, S.; Alizadeh, M.; Balakrishnan, H.; Chawla, S.; Madden, S.; DeWitt, D. RoadTracer: Automatic Extraction of Road Networks from Aerial Images. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4720–4728. [Google Scholar] [CrossRef]
- He, S.; Bastani, F.; Jagwani, S.; Alizadeh, M.; Balakrishnan, H.; Chawla, S.; Elshrif, M.M.; Madden, S.; Sadeghi, M.A. Sat2Graph: Road Graph Extraction Through Graph-Tensor Encoding. In Proceedings of the Computer Vision—ECCV 2020, Glasgow, UK, 23–28 August 2020; Vedaldi, A., Bischof, H., Brox, T., Frahm, J.M., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 51–67. [Google Scholar]
- Wei, Y.; Zhang, K.; Ji, S. Simultaneous Road Surface and Centerline Extraction From Large-Scale Remote Sensing Images Using CNN-Based Segmentation and Tracing. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8919–8931. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, K.; Ji, S. Road Network Extraction from Satellite Images Using CNN Based Segmentation and Tracing. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 3923–3926. [Google Scholar] [CrossRef]
- Bahl, G.; Bahri, M.; Lafarge, F. Single-Shot End-to-end Road Graph Extraction. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), New Orleans, LA, USA, 19–20 June 2022; pp. 1402–1411. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, J.; Lu, X.; Xia, M.; Wang, X.; Liu, Y. RoadNet: Learning to Comprehensively Analyze Road Networks in Complex Urban Scenes From High-Resolution Remotely Sensed Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2043–2056. [Google Scholar] [CrossRef]
- Lu, X.; Zhong, Y.; Zheng, Z.; Chen, D.; Su, Y.; Ma, A.; Zhang, L. Cascaded Multi-Task Road Extraction Network for Road Surface, Centerline, and Edge Extraction. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Shan, Z.; Wu, H.; Sun, W.; Zheng, B. COBWEB: A Robust Map Update System Using GPS Trajectories. In Proceedings of the UbiComp’15: The 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 927–937. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X.; Wei, H.; Forman, G.; Zhu, Y. CrowdAtlas: Self-Updating Maps for Cloud and Personal Use. In Proceedings of the MobiSys’13: The 11th annual international conference on Mobile systems applications, and services, Taipei, Taiwan, 25–28 June 2013; pp. 469–470. [Google Scholar] [CrossRef]
- Wei, X.; Shikai, S.; Jian, L. Road Map Update from Satellite Images by Object Segmentation and Change Analysis. In Proceedings of the 2018 tenth IAPR Workshop on Pattern Recognition in Remote Sensing (PRRS), Beijing, China, 19–20 August 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Xu, J.; Luo, C.; Chen, X.; Wei, S.; Luo, Y. Remote Sensing Change Detection Based on Multidirectional Adaptive Feature Fusion and Perceptual Similarity. Remote Sens. 2021, 13, 3053. [Google Scholar] [CrossRef]
- Cheng, G.; Wang, G.; Han, J. ISNet: Towards Improving Separability for Remote Sensing Image Change Detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Chen, H.; Qi, Z.; Shi, Z. Remote Sensing Image Change Detection with Transformers. IEEE Trans. Geosci. Remote Sens. 2022, 60, 3095166. [Google Scholar] [CrossRef]
- Wang, C.Y.; Liao, H.Y.M.; Yeh, I.H.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W. CSPNet: A New Backbone that can Enhance Learning Capability of CNN. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 1571–1580. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar] [CrossRef]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. YOLOX: Exceeding YOLO Series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression. Proc. Aaai Conf. Artif. Intell. 2020, 34, 12993–13000. [Google Scholar] [CrossRef]
- Kingma, D.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the International Conference on Learning Representations, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- Wiedemann, C.; Heipke, C.; Mayer, H.; Jamet, O. Empirical evaluation of automatically extracted road axes. Empir. Eval. Tech. Comput. Vis. 1998, 12, 172–187. [Google Scholar]
- Etten, A.V.; Lindenbaum, D.; Bacastow, T.M. SpaceNet: A Remote Sensing Dataset and Challenge Series. arXiv 2018, arXiv:1807.01232. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Pixel-Level Metrics (%) 1 | |||
|---|---|---|---|---|
| Comp-Improvement | Corr-Improvement | Qual-Improvement | ||
| The whole test cities | Maid [6] | 56.05 | 50.05 | 51.24 |
| RecurrentUnet [22] | 55.97 | 50.36 | 51.34 | |
| RoadConn [12] | 60.92 | 39.63 | 49.01 | |
| RoadTracer [45] | 56.81 | 50.24 | 51.74 | |
| Sat2Graph [46] | 55.93 | 48.63 | 50.52 | |
| RNGDet [2] | 60.51 | 31.37 | 45.06 | |
| VecRoadUpd | 66.81 | 62.11 | 62.75 | |
| Diff | VecRoadUpd-Maid | 10.76 | 12.06 | 11.51 |
| VecRoadUpd-RecurrentUnet | 10.84 | 11.75 | 11.41 | |
| VecRoadUpd-RoadConn | 5.89 | 22.48 | 13.74 | |
| VecRoadUpd-RoadTracer | 10.00 | 11.87 | 11.01 | |
| VecRoadUpd-Sat2Graph | 10.88 | 13.48 | 12.23 | |
| VecRoadUpd-RNGDet | 6.30 | 30.74 | 17.69 | |
| Methods 1 | Graph-Level Metrics (%) 2 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| All | Constructed | Was-Missing | Deconstructed | Was-Incorrect | ||||||||
| Pre | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | ||
| The whole test scenarios | Ma [6] | 98.95 | 20.05 | 33.35 | 20.64 | 34.15 | 27.12 | 42.57 | 6.95 | 12.99 | 2.05 | 4.02 |
| ReU [22] | 97.37 | 15.78 | 27.16 | 11.98 | 21.34 | 24.44 | 39.07 | 1.66 | 3.27 | 1.25 | 2.48 | |
| RC [12] | 75.26 | 15.25 | 25.36 | 16.47 | 27.03 | 23.47 | 35.78 | 0.88 | 1.75 | −0.67 | −1.36 | |
| RT [45] | 98.68 | 21.72 | 35.60 | 21.43 | 35.21 | 29.41 | 45.31 | 4.66 | 8.91 | 3.96 | 7.61 | |
| S2G [46] | 91.84 | 18.05 | 30.17 | 14.40 | 24.90 | 27.96 | 42.87 | 5.19 | 9.82 | −0.25 | −0.49 | |
| RNG [2] | 91.32 | 22.55 | 36.17 | 22.70 | 36.36 | 25.19 | 39.49 | 4.21 | 8.05 | 2.16 | 4.22 | |
| VecUpd | 98.70 | 33.50 | 50.02 | 28.10 | 43.75 | 36.79 | 53.60 | 21.38 | 35.15 | 27.78 | 43.36 | |
| Diff | VecUpd-Ma | −0.25 | 13.45 | 16.67 | 7.46 | 9.60 | 9.67 | 11.03 | 14.43 | 22.16 | 25.73 | 39.34 |
| VecUpd-ReU | 1.33 | 17.72 | 22.86 | 16.12 | 22.41 | 12.35 | 14.53 | 19.72 | 31.88 | 26.53 | 40.88 | |
| VecUpd-RC | 23.44 | 18.25 | 24.66 | 11.63 | 16.72 | 13.32 | 17.82 | 20.50 | 33.40 | 28.45 | 44.72 | |
| VecUpd-RT | 0.02 | 11.78 | 14.42 | 6.67 | 8.54 | 7.38 | 8.29 | 16.72 | 26.24 | 23.82 | 35.75 | |
| VecUpd-S2G | 6.86 | 15.45 | 19.85 | 13.70 | 18.85 | 8.83 | 10.73 | 16.19 | 25.33 | 28.03 | 43.85 | |
| VecUpd-RNG | 7.38 | 10.95 | 13.85 | 5.40 | 7.39 | 11.60 | 14.11 | 17.17 | 27.10 | 25.62 | 39.14 | |
| Metrics (%) 1 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| All | Constructed | Was-Missing | Deconstructed | Was-Incorrect | |||||||
| Pre | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | |
| 0.60 | 98.70 | 25.67 | 40.74 | 26.07 | 41.24 | 24.59 | 39.38 | 17.47 | 29.68 | 23.85 | 38.42 |
| 0.65 | 98.70 | 29.37 | 45.27 | 26.89 | 42.26 | 30.83 | 46.98 | 20.12 | 33.43 | 24.14 | 38.79 |
| 0.70 | 98.70 | 33.50 | 50.02 | 28.10 | 43.75 | 36.79 | 53.60 | 21.38 | 35.15 | 27.78 | 43.36 |
| 0.75 | 93.65 | 27.02 | 41.94 | 25.36 | 39.91 | 27.85 | 42.93 | 17.45 | 29.41 | 23.14 | 37.10 |
| 0.80 | 90.21 | 26.33 | 40.76 | 25.39 | 39.62 | 26.76 | 41.28 | 17.25 | 28.96 | 20.92 | 33.97 |
| 0.85 | 75.22 | 24.96 | 37.49 | 23.97 | 36.35 | 27.12 | 39.86 | 13.53 | 22.93 | 16.72 | 27.36 |
| Metrics (%) 1 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| All | Constructed | Was-Missing | Deconstructed | Was-Incorrect | |||||||
| Pre | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | |
| /32 | 63.26 | 25.68 | 36.53 | 24.96 | 35.80 | 25.73 | 36.58 | 17.83 | 27.82 | 22.79 | 33.50 |
| /16 | 89.31 | 26.71 | 41.12 | 27.36 | 41.88 | 27.30 | 41.82 | 11.94 | 21.06 | 16.27 | 27.53 |
| 3/32 | 93.45 | 29.48 | 44.82 | 27.58 | 42.59 | 30.13 | 45.57 | 23.53 | 37.60 | 23.45 | 37.49 |
| /8 | 98.70 | 33.50 | 50.02 | 28.10 | 43.75 | 36.79 | 53.60 | 21.38 | 35.15 | 27.78 | 43.36 |
| 5/32 | 98.70 | 31.78 | 48.08 | 26.57 | 41.87 | 35.64 | 52.37 | 8.15 | 15.07 | 24.53 | 39.29 |
| 3/16 | 98.70 | 28.62 | 44.37 | 23.88 | 38.46 | 31.86 | 48.17 | 20.62 | 34.11 | 21.43 | 35.22 |
| Methods | Graph-Level Metrics (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| All | Constructed | Was-Missing | Deconstructed | Was-Incorrect | |||||||
| Pre | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | Recall | F1 | |
| with Directed_Tracing | 98.70 | 33.50 | 50.02 | 28.10 | 43.75 | 36.79 | 53.60 | 21.38 | 35.15 | 27.78 | 43.36 |
| without Directed_Tracing | 98.67 | 28.05 | 43.68 | 27.06 | 42.48 | 36.03 | 52.79 | 7.67 | 14.24 | 8.44 | 15.55 |
| Methods | Pixel-Level Metrics (%) | Inference Time (h) | ||
|---|---|---|---|---|
| Comp-Improvement | Corr-Improvement | Qual-Improvement | ||
| with Directed_Tracing | 66.81 | 62.11 | 62.75 | 2.1347 |
| without Directed_Tracing | 66.82 | 55.01 | 59.61 | 8.9538 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sui, H.; Zhou, N.; Zhou, M.; Ge, L. Vector Road Map Updating from High-Resolution Remote-Sensing Images with the Guidance of Road Intersection Change Detection and Directed Road Tracing. Remote Sens. 2023, 15, 1840. https://doi.org/10.3390/rs15071840
Sui H, Zhou N, Zhou M, Ge L. Vector Road Map Updating from High-Resolution Remote-Sensing Images with the Guidance of Road Intersection Change Detection and Directed Road Tracing. Remote Sensing. 2023; 15(7):1840. https://doi.org/10.3390/rs15071840
Chicago/Turabian StyleSui, Haigang, Ning Zhou, Mingting Zhou, and Liang Ge. 2023. "Vector Road Map Updating from High-Resolution Remote-Sensing Images with the Guidance of Road Intersection Change Detection and Directed Road Tracing" Remote Sensing 15, no. 7: 1840. https://doi.org/10.3390/rs15071840
APA StyleSui, H., Zhou, N., Zhou, M., & Ge, L. (2023). Vector Road Map Updating from High-Resolution Remote-Sensing Images with the Guidance of Road Intersection Change Detection and Directed Road Tracing. Remote Sensing, 15(7), 1840. https://doi.org/10.3390/rs15071840