
Cloud Top Thermodynamic Phase from Synergistic Lidar-Radar Cloud Products from Polar Orbiting Satellites: Implications for Observations from Geostationary Satellites

Abstract
1. Introduction
1.1. Background
1.2. Scope of Present Work
2. Materials and Methods
2.1. DARDAR Data Set
2.2. MSG and CiPS
2.3. Definition of the Cloud Top Phase
2.3.1. Removal of Isolated Gates
2.3.2. Identification of the Cloud Top Layer
2.3.3. Collocation and Aggregation
- The DARDAR profiles are collocated with SEVIRI pixels based on latitude, longitude, acquisition time, and CTH information of the topmost gate (see Figure 1b). Consideration of the CTH is needed since a DARDAR gate containing a high cloud can be assigned to a different SEVIRI pixel than suggested by the longitude and latitude due to the viewing angle of the geostationary satellite (parallax effect).
- If no cloudy gates are present, the SEVIRI pixel is classified as clear-sky.
- A cloudy pixel in SEVIRI resolution is required to contain only DARDAR gates that have a similar CTH. Otherwise the averaging might take place over two different clouds. Therefore, all SEVIRI pixels for which the CTHs of any of the contained DARDAR gates vary by more than 1 km are not considered further.
- If a SEVIRI pixel is not fully covered by cloudy DARDAR gates, it is not considered further in order to avoid cloud edges.
- If a SEVIRI pixel is fully covered by cloudy DARDAR layers, the CTP is assigned by considering all DARDAR gates included in the vertical band mentioned above:
- If all DARDAR gates are of the same phase, the SEVIRI-like CTP adopts this phase classification.
- SEVIRI pixels which contain different DARDAR cloud phases, but only the phases IC, MP, or SC are classified as MP cloud tops.
- SEVIRI pixels that contain LQ and at least one more phase (IC, MP, or SC) are not considered further; this applies to edges between LQ clouds and clouds with other phases.
2.4. Data Set of Collocated DARDAR and MSG Cloud Top Phase
3. Occurrence of Cloud Top Phase
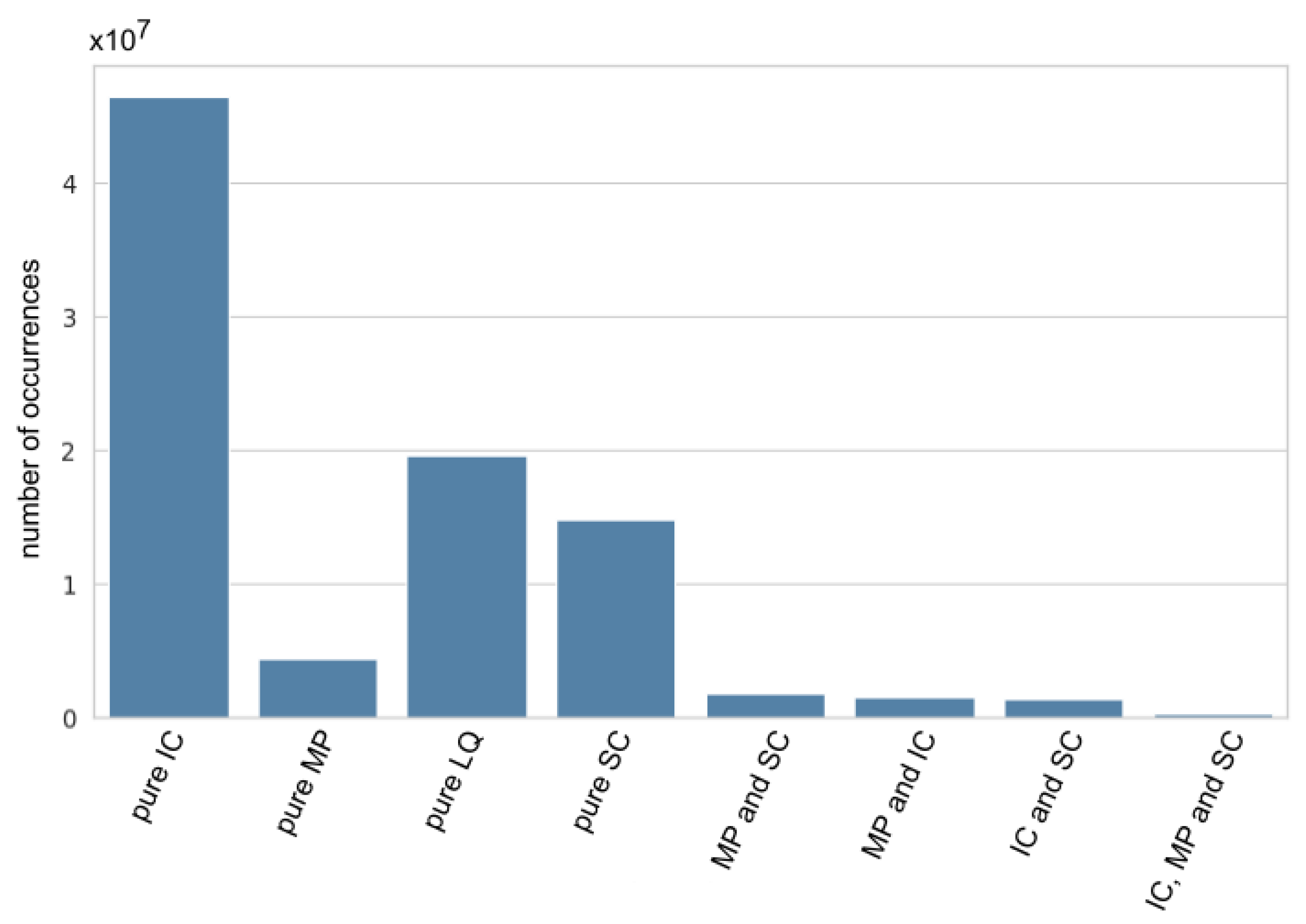
3.1. Resolution Effects and Geographic Distribution
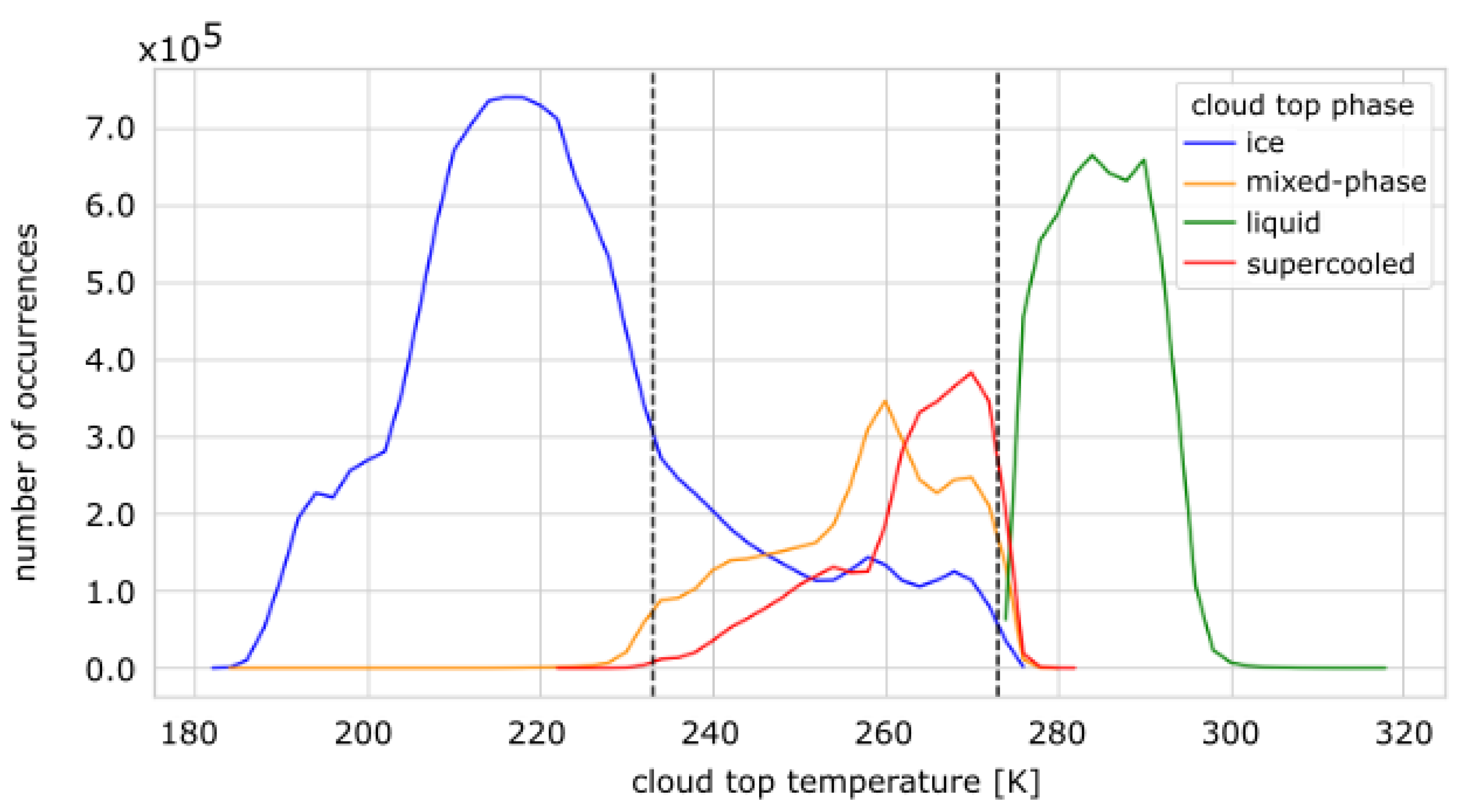
3.2. Phase as a Function of Cloud Top Temperature
3.3. Phase Occurrence at Varying Cloud Top Heights
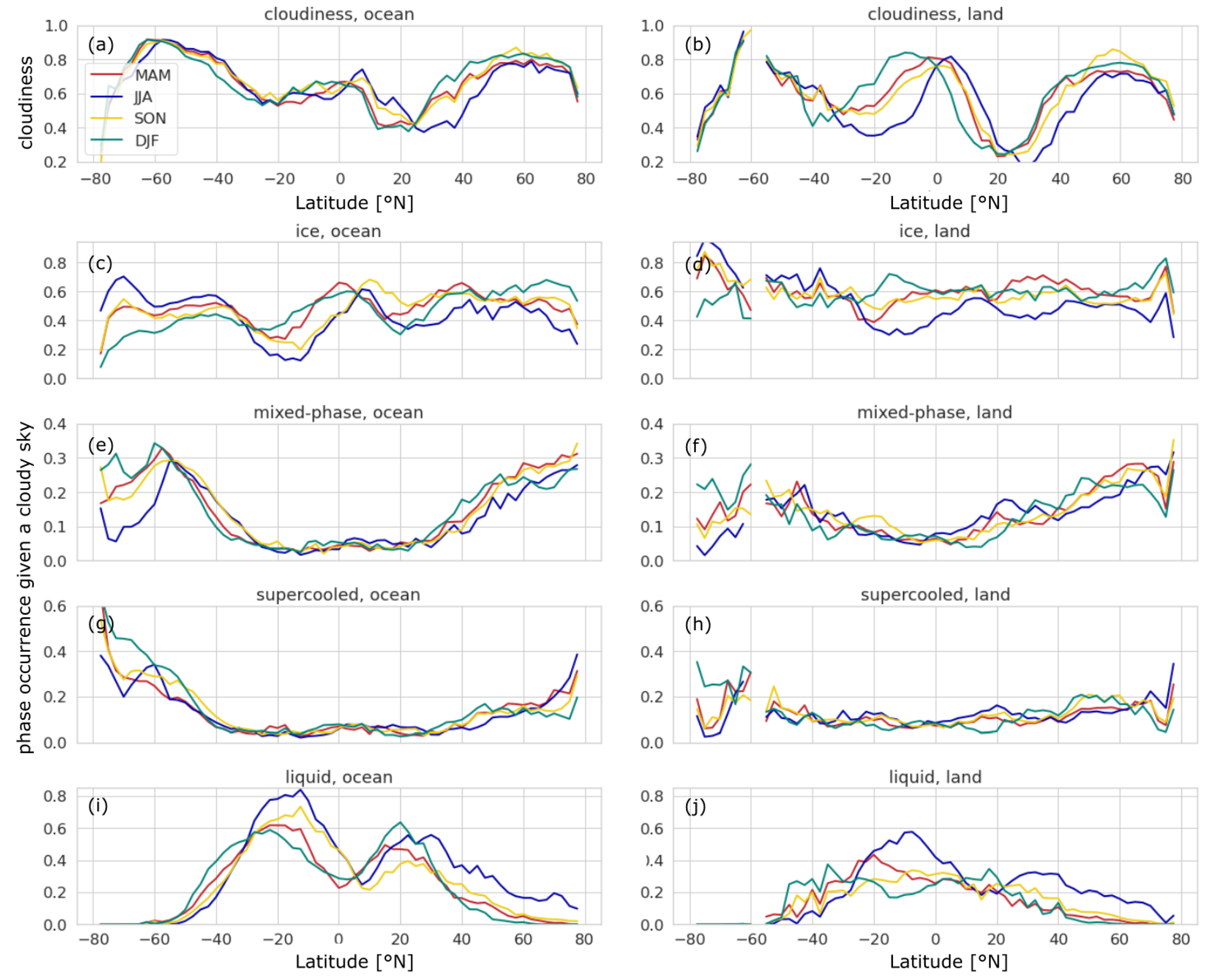
3.4. Variability with Season and Surface Type
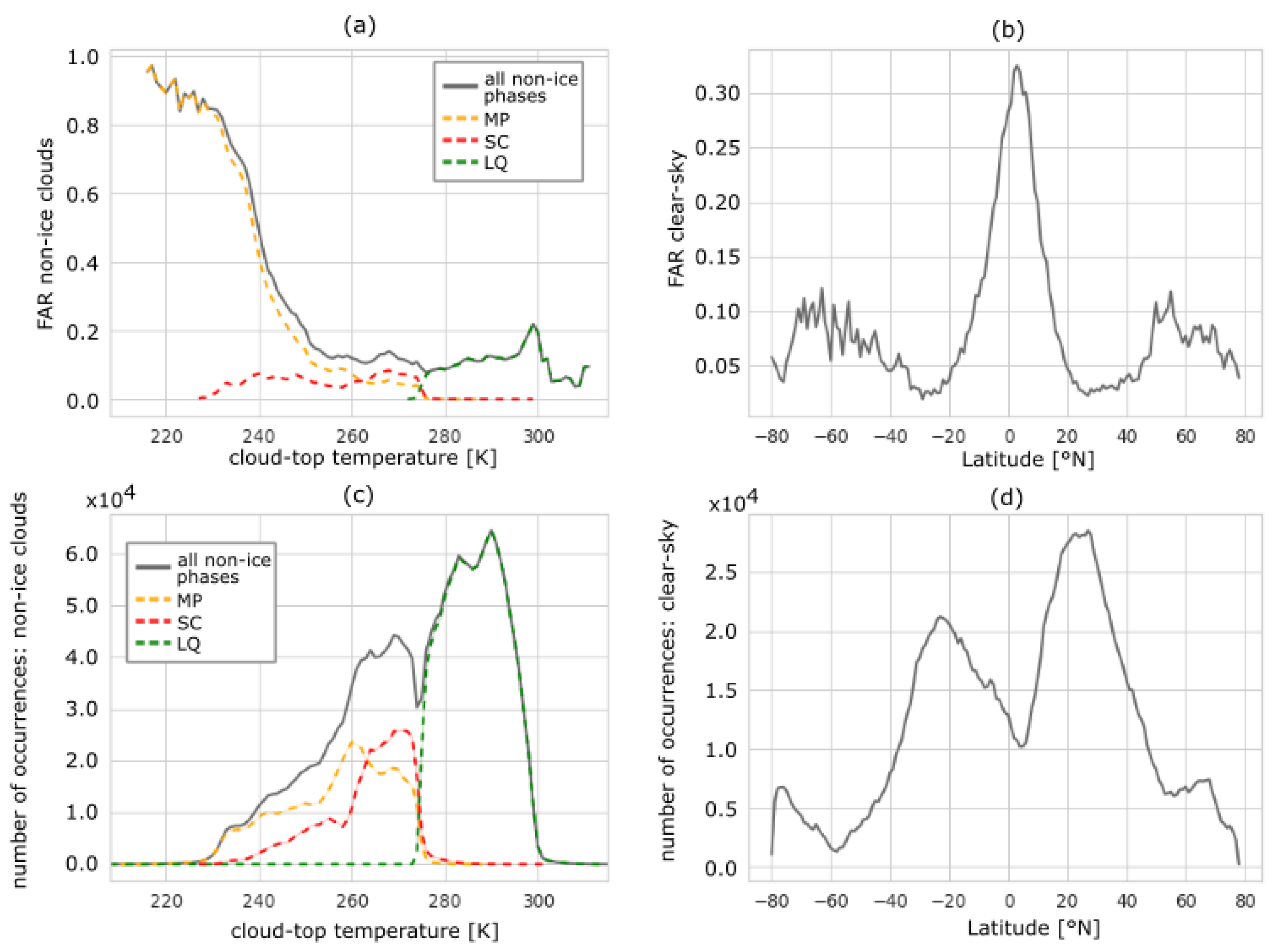
4. Evaluation of CiPS
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Boucher, O.; Randall, D.; Artaxo, P.; Bretherton, C.; Feingold, G.; Forster, P.; Kerminen, V.M.; Kondo, Y.; Liao, H.; Lohmann, U.; et al. Clouds and Aerosols. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.-K., Tignor, M., Allen, S.K., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P.M., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013; pp. 571–658. [Google Scholar] [CrossRef]
- Forster, P.; Storelvmo, T.; Armour, K.; Collins, W.; Dufresne, J.L.; Frame, D.; Lunt, D.; Mauritsen, T.; Palmer, M.; Watanabe, M.; et al. The Earth’s Energy Budget, Climate Feedbacks, and Climate Sensitivity. In Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Masson-Delmotte, V., Zhai, P., Pirani, A., Connors, S.L., Péan, C., Berger, S., Caud, N., Chen, Y., Goldfarb, L., Gomis, M.I., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2021; pp. 923–1054. [Google Scholar] [CrossRef]
- Ehrlich, A.; Bierwirth, E.; Wendisch, M.; Gayet, J.F.; Mioche, G.; Lampert, A.; Heintzenberg, J. Cloud phase identification of Arctic boundary-layer clouds from airborne spectral reflection measurements: Test of three approaches. Atmos. Chem. Phys. 2008, 8, 7493–7505. [Google Scholar] [CrossRef]
- Tan, I.; Storelvmo, T.; Zelinka, M.D. Observational constraints on mixed-phase clouds imply higher climate sensitivity. Science 2016, 352, 224–227. [Google Scholar] [CrossRef] [PubMed]
- Thompson, D.R.; Kahn, B.H.; Green, R.O.; Chien, S.A.; Middleton, E.M.; Tran, D.Q. Global spectroscopic survey of cloud thermodynamic phase at high spatial resolution, 2005–2015. Atmos. Meas. Tech. 2018, 11, 1019–1030. [Google Scholar] [CrossRef]
- McCoy, D.T.; Hartmann, D.L.; Zelinka, M.D.; Ceppi, P.; Grosvenor, D.P. Mixed-phase cloud physics and Southern Ocean cloud feedback in climate models. J. Geophys. Res. Atmos. 2015, 120, 9539–9554. [Google Scholar] [CrossRef]
- Choi, Y.S.; Ho, C.H.; Park, C.E.; Storelvmo, T.; Tan, I. Influence of cloud phase composition on climate feedbacks. J. Geophys. Res. Atmos. 2014, 119, 3687–3700. [Google Scholar] [CrossRef]
- Komurcu, M.; Storelvmo, T.; Tan, I.; Lohmann, U.; Yun, Y.; Penner, J.E.; Wang, Y.; Liu, X.; Takemura, T. Intercomparison of the cloud water phase among global climate models. J. Geophys. Res. Atmos. 2014, 119, 3372–3400. [Google Scholar] [CrossRef]
- Mioche, G.; Jourdan, O.; Ceccaldi, M.; Delanoë, J. Variability of mixed-phase clouds in the Arctic with a focus on the Svalbard region: A study based on spaceborne active remote sensing. Atmos. Chem. Phys. 2015, 15, 2445–2461. [Google Scholar] [CrossRef]
- Matus, A.V.; L’Ecuyer, T.S. The role of cloud phase in Earths radiation budget. J. Geophys. Res. Atmos. 2017, 122, 2559–2578. [Google Scholar] [CrossRef]
- Ricaud, P.; Guasta, M.D.; Lupi, A.; Roehrig, R.; Bazile, E.; Durand, P.; Attié, J.L.; Nicosia, A.; Grigioni, P. Supercooled liquid water clouds observed over Dome C, Antarctica: Temperature sensitivity and surface radiation impact. Atmos. Chem. Phys. Discuss. 2022. [Google Scholar] [CrossRef]
- Cheng, A.; Xu, K.M.; Hu, Y.; Kato, S. Impact of a cloud thermodynamic phase parameterization based on CALIPSO observations on climate simulation. J. Geophys. Res. Atmos. 2012, 117, D09103. [Google Scholar] [CrossRef]
- Cesana, G.; Waliser, D.E.; Jiang, X.; Li, J.L.F. Multimodel evaluation of cloud phase transition using satellite and reanalysis data. J. Geophys. Res. Atmos. 2015, 120, 7871–7892. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, D.; Luo, T.; Wang, Z.; Yin, Y. Aerosol impacts on cloud thermodynamic phase change over East Asia observed with CALIPSO and CloudSat measurements. J. Geophys. Res. Atmos. 2015, 120, 1490–1501. [Google Scholar] [CrossRef]
- Braga, R.C.; Rosenfeld, D.; Weigel, R.; Jurkat, T.; Andreae, M.O.; Wendisch, M.; Pöschl, U.; Voigt, C.; Mahnke, C.; Borrmann, S.; et al. Further evidence for CCN aerosol concentrations determining the height of warm rain and ice initiation in convective clouds over the Amazon basin. Atmos. Chem. Phys. 2017, 17, 14433–14456. [Google Scholar] [CrossRef]
- Coopman, Q.; Hoose, C.; Stengel, M. Analyzing the Thermodynamic Phase Partitioning of Mixed Phase Clouds Over the Southern Ocean Using Passive Satellite Observations. Geophys. Res. Lett. 2021, 48, e2021GL093225. [Google Scholar] [CrossRef]
- Atkinson, J.D.; Murray, B.J.; Woodhouse, M.T.; Whale, T.F.; Baustian, K.J.; Carslaw, K.S.; Dobbie, S.; O’Sullivan, D.; Malkin, T.L. The importance of feldspar for ice nucleation by mineral dust in mixed-phase clouds. Nature 2013, 498, 355–358. [Google Scholar] [CrossRef] [PubMed]
- Prenni, A.J.; Harrington, J.Y.; Tjernström, M.; DeMott, P.J.; Avramov, A.; Long, C.N.; Kreidenweis, S.M.; Olsson, P.Q.; Verlinde, J. Can Ice-Nucleating Aerosols Affect Arctic Seasonal Climate? Bull. Am. Meteorol. Soc. 2007, 88, 541–550. [Google Scholar] [CrossRef]
- Morrison, H.; Zuidema, P.; Ackerman, A.S.; Avramov, A.; de Boer, G.; Fan, J.; Fridlind, A.M.; Hashino, T.; Harrington, J.Y.; Luo, Y.; et al. Intercomparison of cloud model simulations of Arctic mixed-phase boundary layer clouds observed during SHEBA/FIRE-ACE. J. Adv. Model. Earth Syst. 2011, 3, 66. [Google Scholar] [CrossRef]
- Gregory, D.; Morris, D. The sensitivity of climate simulations to the specification of mixed phase clouds. Clim. Dyn. 1996, 12, 641–651. [Google Scholar] [CrossRef]
- Doutriaux-Boucher, M.; Quaas, J. Evaluation of cloud thermodynamic phase parametrizations in the LMDZ GCM by using POLDER satellite data. Geophys. Res. Lett. 2004, 31, L06126. [Google Scholar] [CrossRef]
- Cesana, G.; Kay, J.E.; Chepfer, H.; English, J.M.; Boer, G. Ubiquitous low-level liquid-containing Arctic clouds: New observations and climate model constraints from CALIPSO-GOCCP. Geophys. Res. Lett. 2012, 39, 53385. [Google Scholar] [CrossRef]
- Stubenrauch, C.J.; Rossow, W.B.; Kinne, S.; Ackerman, S.; Cesana, G.; Chepfer, H.; Girolamo, L.D.; Getzewich, B.; Guignard, A.; Heidinger, A.; et al. Assessment of Global Cloud Datasets from Satellites: Project and Database Initiated by the GEWEX Radiation Panel. Bull. Am. Meteorol. Soc. 2013, 94, 1031–1049. [Google Scholar] [CrossRef]
- Stubenrauch, C.J.; Feofilov, A.G.; Protopapadaki, S.E.; Armante, R. Cloud climatologies from the infrared sounders AIRS and IASI: Strengths and applications. Atmos. Chem. Phys. 2017, 17, 13625–13644. [Google Scholar] [CrossRef]
- Li, W.; Zhang, F.; Lin, H.; Chen, X.; Li, J.; Han, W. Cloud Detection and Classification Algorithms for Himawari-8 Imager Measurements Based on Deep Learning. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Zhou, G.; Wang, J.; Yin, Y.; Hu, X.; Letu, H.; Sohn, B.J.; Yung, Y.L.; Liu, C. Detecting Supercooled Water Clouds Using Passive Radiometer Measurements. Geophys. Res. Lett. 2022, 49, e2021GL096111. [Google Scholar] [CrossRef]
- Hu, Y.; Winker, D.; Vaughan, M.; Lin, B.; Omar, A.; Trepte, C.; Flittner, D.; Yang, P.; Nasiri, S.L.; Baum, B.; et al. CALIPSO/CALIOP Cloud Phase Discrimination Algorithm. J. Atmos. Ocean. Technol. 2009, 26, 2293–2309. [Google Scholar] [CrossRef]
- Hu, Y.; Rodier, S.; man Xu, K.; Sun, W.; Huang, J.; Lin, B.; Zhai, P.; Josset, D. Occurrence, liquid water content, and fraction of supercooled water clouds from combined CALIOP/IIR/MODIS measurements. J. Geophys. Res. 2010, 115, 2384. [Google Scholar] [CrossRef]
- Luke, E.P.; Kollias, P.; Shupe, M.D. Detection of supercooled liquid in mixed-phase clouds using radar Doppler spectra. J. Geophys. Res. 2010, 115, 2884. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, Z.; Liu, D. A global view of midlevel liquid-layer topped stratiform cloud distribution and phase partition from CALIPSO and CloudSat measurements. J. Geophys. Res. 2010, 115, 2143. [Google Scholar] [CrossRef]
- Cesana, G.; Storelvmo, T. Improving climate projections by understanding how cloud phase affects radiation. J. Geophys. Res. Atmos. 2017, 122, 4594–4599. [Google Scholar] [CrossRef]
- Bruno, O.; Hoose, C.; Storelvmo, T.; Coopman, Q.; Stengel, M. Exploring the Cloud Top Phase Partitioning in Different Cloud Types Using Active and Passive Satellite Sensors. Geophys. Res. Lett. 2021, 48, 89863. [Google Scholar] [CrossRef]
- Korolev, A.; McFarquhar, G.; Field, P.R.; Franklin, C.; Lawson, P.; Wang, Z.; Williams, E.; Abel, S.J.; Axisa, D.; Borrmann, S.; et al. Mixed-Phase Clouds: Progress and Challenges. Meteorol. Monogr. 2017, 58, 51–550. [Google Scholar] [CrossRef]
- Wang, Z. Level 2 Combined Radar and Lidar Cloud Scenario Classification Product Process Description and Interface Control Document; Report 22; Jet Propulsion Laboratory: Pasadena, CA, USA, 2012. [Google Scholar]
- Delanoë, J.; Hogan, R.J. A variational scheme for retrieving ice cloud properties from combined radar, lidar, and infrared radiometer. J. Geophys. Res. 2008, 113, D07204. [Google Scholar] [CrossRef]
- Ewald, F.; Groß, S.; Wirth, M.; Delanoë, J.; Fox, S.; Mayer, B. Why we need radar, lidar, and solar radiance observations to constrain ice cloud microphysics. Atmos. Meas. Tech. 2021, 14, 5029–5047. [Google Scholar] [CrossRef]
- Listowski, C.; Delanoë, J.; Kirchgaessner, A.; Lachlan-Cope, T.; King, J. Antarctic clouds, supercooled liquid water and mixed phase, investigated with DARDAR: Geographical and seasonal variations. Atmos. Chem. Phys. 2019, 19, 6771–6808. [Google Scholar] [CrossRef]
- Okamoto, H.; Sato, K.; Hagihara, Y. Global analysis of ice microphysics from CloudSat and CALIPSO: Incorporation of specular reflection in lidar signals. J. Geophys. Res. 2010, 115, 13383. [Google Scholar] [CrossRef]
- Zaremba, T.J.; Rauber, R.M.; McFarquhar, G.M.; Hayman, M.; Finlon, J.A.; Stechman, D.M. Phase Characterization of Cold Sector Southern Ocean Cloud Tops: Results From SOCRATES. J. Geophys. Res. Atmos. 2020, 125, 33673. [Google Scholar] [CrossRef]
- Rauber, R.M.; Tokay, A. An Explanation for the Existence of Supercooled Water at the Top of Cold Clouds. J. Atmos. Sci. 1991, 48, 1005–1023. [Google Scholar] [CrossRef]
- Khain, A.; Pinsky, M.; Korolev, A. Combined Effect of the Wegener–Bergeron–Findeisen Mechanism and Large Eddies on Microphysics of Mixed-Phase Stratiform Clouds. J. Atmos. Sci. 2022, 79, 383–407. [Google Scholar] [CrossRef]
- Baum, B.A.; Menzel, W.P.; Frey, R.A.; Tobin, D.C.; Holz, R.E.; Ackerman, S.A.; Heidinger, A.K.; Yang, P. MODIS Cloud-Top Property Refinements for Collection 6. J. Appl. Meteorol. Climatol. 2012, 51, 1145–1163. [Google Scholar] [CrossRef]
- Key, J.R.; Intrieri, J.M. Cloud Particle Phase Determination with the AVHRR. J. Appl. Meteorol. 2000, 39, 1797–1804. [Google Scholar] [CrossRef]
- Platnick, S.; Meyer, K.G.; King, M.D.; Wind, G.; Amarasinghe, N.; Marchant, B.; Arnold, G.T.; Zhang, Z.; Hubanks, P.A.; Holz, R.E.; et al. The MODIS Cloud Optical and Microphysical Products: Collection 6 Updates and Examples From Terra and Aqua. IEEE Trans. Geosci. Remote Sens. 2017, 55, 502–525. [Google Scholar] [CrossRef]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An Introduction to Himawari-8/9-Japan’s New-Generation Geostationary Meteorological Satellites. J. Meteorol. Soc. Japan. Ser. II 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Benas, N.; Finkensieper, S.; Stengel, M.; van Zadelhoff, G.J.; Hanschmann, T.; Hollmann, R.; Meirink, J.F. The MSG-SEVIRI-based cloud property data record CLAAS-2. Earth Syst. Sci. Data 2017, 9, 415–434. [Google Scholar] [CrossRef]
- Pavolonis, M. GOES-R Advanced Baseline Imager (ABI) Algorithm Theoretical Basis Document For Cloud Type and Cloud Phase. 2010. Available online: https://www.star.nesdis.noaa.gov/smcd/spb/aq/AerosolWatch/docs/GOES-R_ABI_AOD_ATBD_V4.2_20180214.pdf (accessed on 12 January 2023).
- Wang, Z.; Letu, H.; Shang, H.; Zhao, C.; Li, J.; Ma, R. A Supercooled Water Cloud Detection Algorithm Using Himawari-8 Satellite Measurements. J. Geophys. Res. Atmos. 2019, 124, 2724–2738. [Google Scholar] [CrossRef]
- Strandgren, J.; Bugliaro, L.; Sehnke, F.; Schröder, L. Cirrus cloud retrieval with MSG/SEVIRI using artificial neural networks. Atmos. Meas. Tech. 2017, 10, 3547–3573. [Google Scholar] [CrossRef]
- Strandgren, J.; Fricker, J.; Bugliaro, L. Characterisation of the artificial neural network CiPS for cirrus cloud remote sensing with MSG/SEVIRI. Atmos. Meas. Tech. 2017, 10, 4317–4339. [Google Scholar] [CrossRef]
- Baum, B.A.; Spinhirne, J.D. Remote sensing of cloud properties using MODIS airborne simulator imagery during SUCCESS: 3. Cloud Overlap. J. Geophys. Res. Atmos. 2000, 105, 11793–11804. [Google Scholar] [CrossRef]
- Cesana, G.; Chepfer, H. Evaluation of the cloud thermodynamic phase in a climate model using CALIPSO-GOCCP. J. Geophys. Res. Atmos. 2013, 118, 7922–7937. [Google Scholar] [CrossRef]
- Delanoë, J.; Hogan, R.J. Combined CloudSat-CALIPSO-MODIS retrievals of the properties of ice clouds. J. Geophys. Res. 2010, 115, 12346. [Google Scholar] [CrossRef]
- Ceccaldi, M.; Delanoë, J.; Hogan, R.J.; Pounder, N.L.; Protat, A.; Pelon, J. From CloudSat-CALIPSO to EarthCare: Evolution of the DARDAR cloud classification and its comparison to airborne radar-lidar observations. J. Geophys. Res. Atmos. 2013, 118, 7962–7981. [Google Scholar] [CrossRef]
- Delanoë, J.; Protat, A.; Jourdan, O.; Pelon, J.; Papazzoni, M.; Dupuy, R.; Gayet, J.F.; Jouan, C. Comparison of Airborne In Situ, Airborne Radar–Lidar, and Spaceborne Radar–Lidar Retrievals of Polar Ice Cloud Properties Sampled during the POLARCAT Campaign. J. Atmos. Ocean. Technol. 2013, 30, 57–73. [Google Scholar] [CrossRef]
- Huang, Y.; Siems, S.T.; Manton, M.J.; Protat, A.; Delanoë, J. A study on the low-altitude clouds over the Southern Ocean using the DARDAR-MASK. J. Geophys. Res. Atmos. 2012, 117, 17800. [Google Scholar] [CrossRef]
- Huang, Y.; Protat, A.; Siems, S.T.; Manton, M.J. A-Train Observations of Maritime Midlatitude Storm-Track Cloud Systems: Comparing the Southern Ocean against the North Atlantic. J. Clim. 2015, 28, 1920–1939. [Google Scholar] [CrossRef]
- Benedetti, A. CloudSat AN-ECMWF Ancillary Data Interface Control Document, Technical Document; CloudSat Data Processing Center: Fort Collins, CO, USA, 2005. [Google Scholar]
- Hogan, R.J.; Francis, P.N.; Flentje, H.; Illingworth, A.J.; Quante, M.; Pelon, J. Characteristics of mixed-phase clouds. I: Lidar, radar and aircraft observations from CLARE’98. Q. J. R. Meteorol. Soc. 2003, 129, 2089–2116. [Google Scholar] [CrossRef]
- Westbrook, C.D.; Illingworth, A.J. The formation of ice in a long-lived supercooled layer cloud. Q. J. R. Meteorol. Soc. 2013, 139, 2209–2221. [Google Scholar] [CrossRef]
- Winker, D. CALIPSO LID_L2_05kmALay-Prov HDF File-Version 3.30; Atmospheric Science Data Center: Washington, DC, USA, 2013. [Google Scholar] [CrossRef]
- Platnick, S. Vertical photon transport in cloud remote sensing problems. J. Geophys. Res. Atmos. 2000, 105, 22919–22935. [Google Scholar] [CrossRef]
- Korolev, A.; Milbrandt, J. How Are Mixed-Phase Clouds Mixed? Geophys. Res. Lett. 2022, 49, 99578. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Verlinden, K.L.; Thompson, D.W.J.; Stephens, G.L. The Three-Dimensional Distribution of Clouds over the Southern Hemisphere High Latitudes. J. Clim. 2011, 24, 5799–5811. [Google Scholar] [CrossRef]
- Bromwich, D.H.; Nicolas, J.P.; Hines, K.M.; Kay, J.E.; Key, E.L.; Lazzara, M.A.; Lubin, D.; McFarquhar, G.M.; Gorodetskaya, I.V.; Grosvenor, D.P.; et al. Tropospheric clouds in Antarctica. Rev. Geophys. 2012, 50, 363. [Google Scholar] [CrossRef]
- Adhikari, L.; Wang, Z.; Deng, M. Seasonal variations of Antarctic clouds observed by CloudSat and CALIPSO satellites. J. Geophys. Res. Atmos. 2012, 117, 16719. [Google Scholar] [CrossRef]
- McFarquhar, G.M. Observations of Clouds, Aerosols, Precipitation, and Surface Radiation over the Southern Ocean: An Overview of CAPRICORN, MARCUS, MICRE, and SOCRATES. Bull. Am. Meteorol. Soc. 2021, 102, E894–E928. [Google Scholar] [CrossRef]
- Schima, J.; McFarquhar, G.; Romatschke, U.; Vivekanandan, J.; D’Alessandro, J.; Haggerty, J.; Wolff, C.; Schaefer, E.; Järvinen, E.; Schnaiter, M. Characterization of Southern Ocean Boundary Layer Clouds Using Airborne Radar, Lidar, and In Situ Cloud Data: Results From SOCRATES. J. Geophys. Res. Atmos. 2022, 127, e2022JD037277. [Google Scholar] [CrossRef]
- Truong, S.C.H.; Huang, Y.; Siems, S.T.; Manton, M.J.; Lang, F. Biases in the thermodynamic structure over the Southern Ocean in ERA5 and their radiative implications. Int. J. Climatol. 2022, 42, 7685–7702. [Google Scholar] [CrossRef]
- Hogan, R.J.; O’Connor, E.J. Facilitating Cloud Radarand Lidar Algorithms: The Cloudnet InstrumentSynergy/Target Categorization Product. 2006. Available online: www.cloud-net.org/data/products/categorize.html (accessed on 20 March 2023).
- Tan, I.; Storelvmo, T.; Choi, Y.S. Spaceborne lidar observations of the ice-nucleating potential of dust, polluted dust, and smoke aerosols in mixed-phase clouds. J. Geophys. Res. Atmos. 2014, 119, 6653–6665. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, Z.; Kollias, P.; Vogelmann, A.M.; Yang, K.; Luo, T. Ice particle production in mid-level stratiform mixed-phase clouds observed with collocated A-Train measurements. Atmos. Chem. Phys. 2018, 18, 4317–4327. [Google Scholar] [CrossRef]
- Li, J.; Lv, Q.; Zhang, M.; Wang, T.; Kawamoto, K.; Chen, S.; Zhang, B. Effects of atmospheric dynamics and aerosols on the fraction of supercooled water clouds. Atmos. Chem. Phys. 2017, 17, 1847–1863. [Google Scholar] [CrossRef]
- Villanueva, D.; Senf, F.; Tegen, I. Hemispheric and seasonal contrast in cloud thermodynamic phase from A-Train spaceborne instruments. J. Geophys. Res. Atmos. 2021, 126, e2020JD034322. [Google Scholar] [CrossRef]
- Twohy, C.H.; DeMott, P.J.; Russell, L.M.; Toohey, D.W.; Rainwater, B.; Geiss, R.; Sanchez, K.J.; Lewis, S.; Roberts, G.C.; Humphries, R.S.; et al. Cloud-Nucleating Particles Over the Southern Ocean in a Changing Climate. Earth’s Future 2021, 9, 1673. [Google Scholar] [CrossRef]
- Durand, Y.; Hallibert, P.; Wilson, M.; Lekouara, M.; Grabarnik, S.; Aminou, D.; Blythe, P.; Napierala, B.; Canaud, J.L.; Pigouche, O.; et al. The Flexible Combined Imager Onboard MTG: From Design to Calibration. Proc. SPIE 2015, 9639, 963903. [Google Scholar] [CrossRef]
- Illingworth, A.J.; Barker, H.W.; Beljaars, A.; Ceccaldi, M.; Chepfer, H.; Clerbaux, N.; Cole, J.; Delanoë, J.; Domenech, C.; Donovan, D.P.; et al. The EarthCARE Satellite: The Next Step Forward in Global Measurements of Clouds, Aerosols, Precipitation, and Radiation. Bull. Am. Meteorol. Soc. 2015, 96, 1311–1332. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DARDAR: Ice | DARDAR: Non-Ice | |
|---|---|---|
| CiPS: ice | 77.1% | 11.6% |
| CiPS: non-ice | 22.9% | 88.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayer, J.; Ewald, F.; Bugliaro, L.; Voigt, C. Cloud Top Thermodynamic Phase from Synergistic Lidar-Radar Cloud Products from Polar Orbiting Satellites: Implications for Observations from Geostationary Satellites. Remote Sens. 2023, 15, 1742. https://doi.org/10.3390/rs15071742
Mayer J, Ewald F, Bugliaro L, Voigt C. Cloud Top Thermodynamic Phase from Synergistic Lidar-Radar Cloud Products from Polar Orbiting Satellites: Implications for Observations from Geostationary Satellites. Remote Sensing. 2023; 15(7):1742. https://doi.org/10.3390/rs15071742
Chicago/Turabian StyleMayer, Johanna, Florian Ewald, Luca Bugliaro, and Christiane Voigt. 2023. "Cloud Top Thermodynamic Phase from Synergistic Lidar-Radar Cloud Products from Polar Orbiting Satellites: Implications for Observations from Geostationary Satellites" Remote Sensing 15, no. 7: 1742. https://doi.org/10.3390/rs15071742
APA StyleMayer, J., Ewald, F., Bugliaro, L., & Voigt, C. (2023). Cloud Top Thermodynamic Phase from Synergistic Lidar-Radar Cloud Products from Polar Orbiting Satellites: Implications for Observations from Geostationary Satellites. Remote Sensing, 15(7), 1742. https://doi.org/10.3390/rs15071742