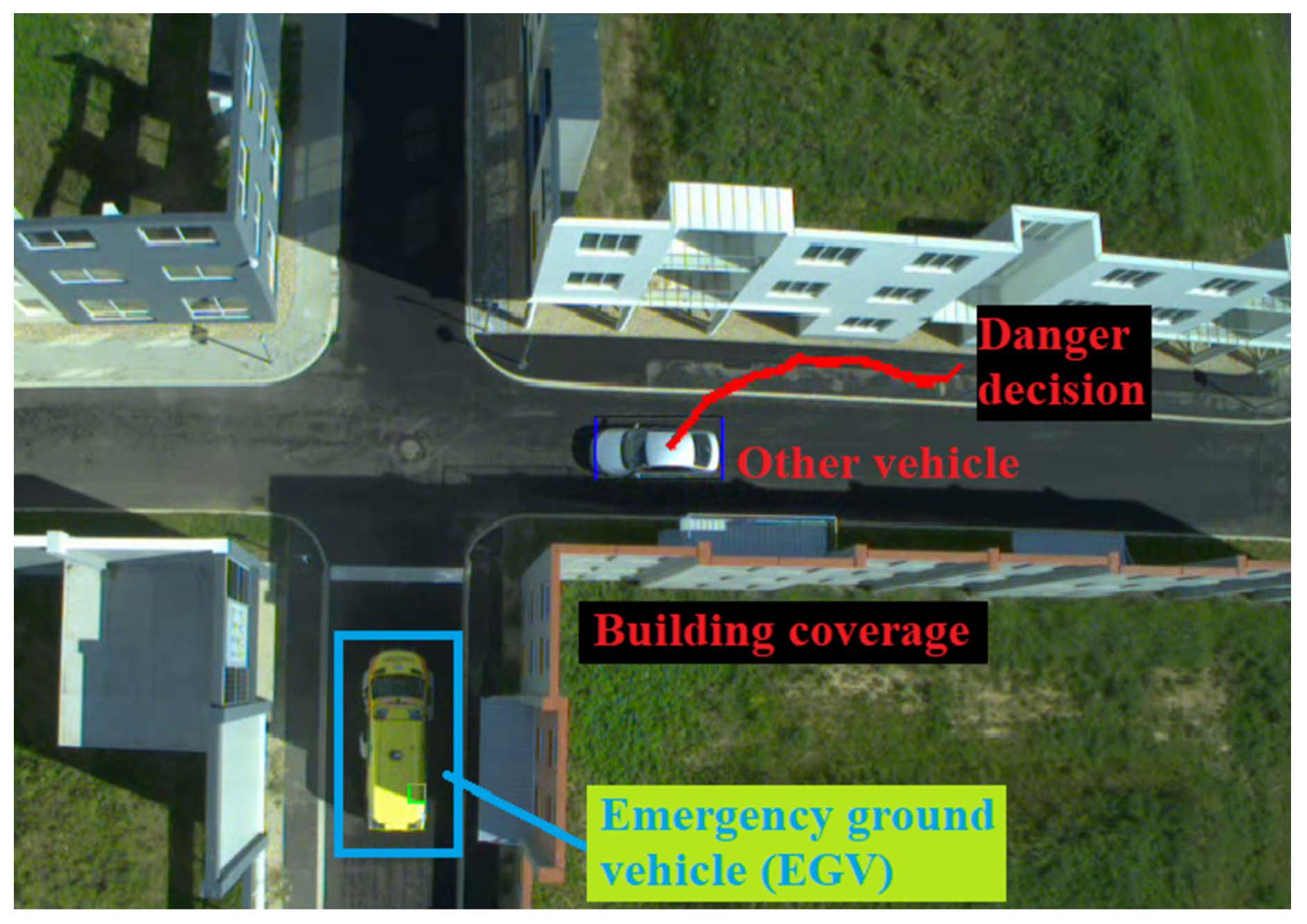
Figure 1.
Forerunner demonstration setup with ambulance car (EGV), UAV and other vehicle.
Figure 1.
Forerunner demonstration setup with ambulance car (EGV), UAV and other vehicle.
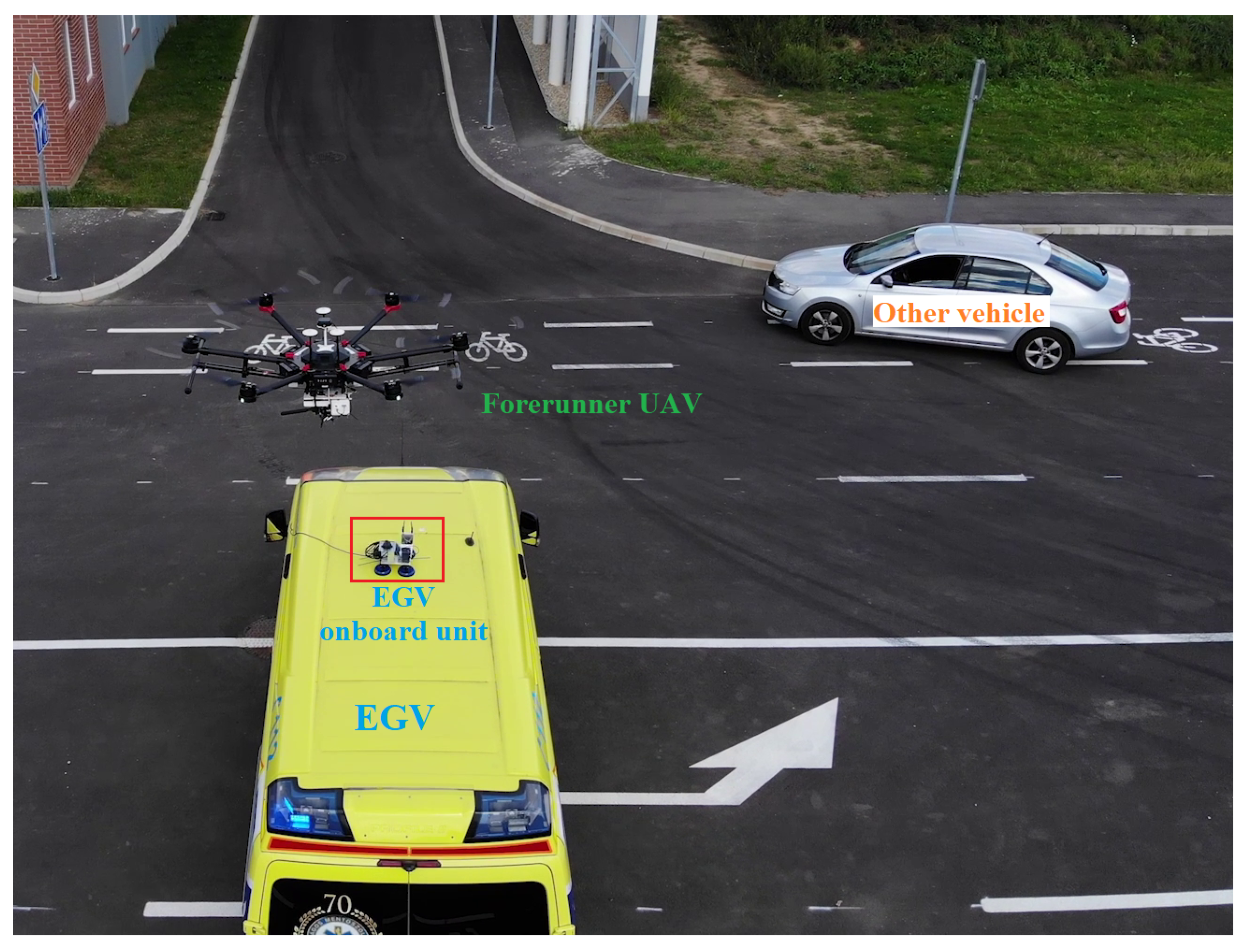
Figure 2.
DJI M600 with the onboard unit installed.
Figure 2.
DJI M600 with the onboard unit installed.
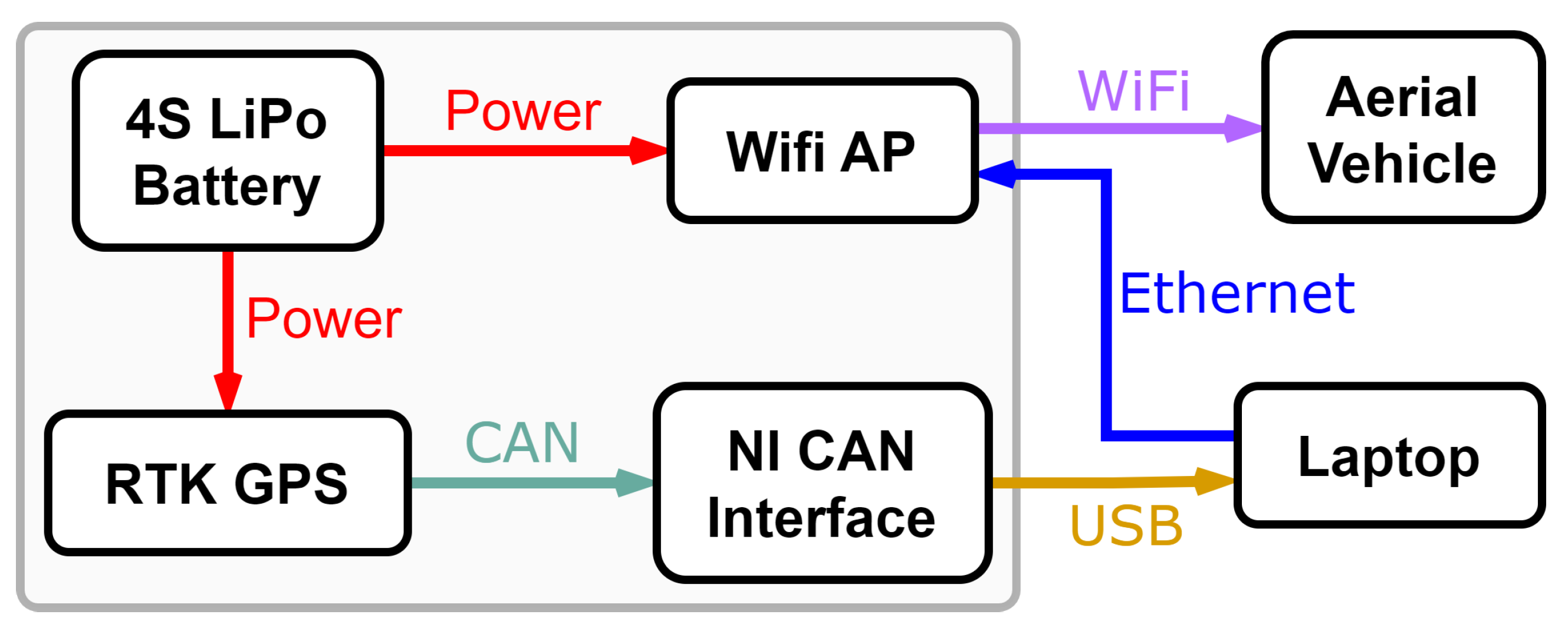
Figure 3.
Block scheme of the EGV onboard hardware.
Figure 3.
Block scheme of the EGV onboard hardware.
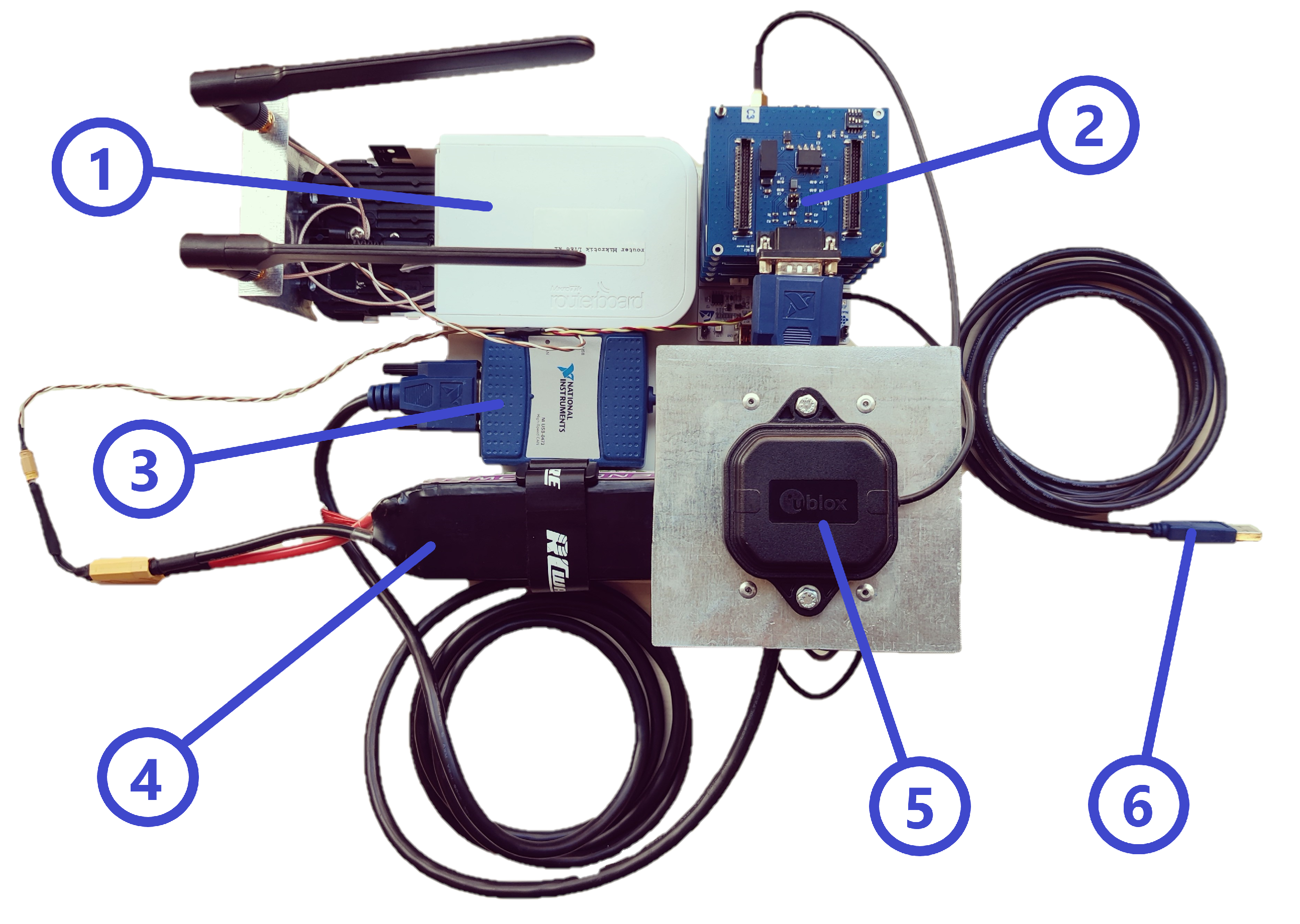
Figure 4.
Onboard hardware system of the EGV. 1: MikroTik router, 2: RTK GNSS electronics, 3: NI CAN interface, 4: 4S LiPo battery, 5: GNSS receiver antenna, 6: USB connection to laptop.
Figure 4.
Onboard hardware system of the EGV. 1: MikroTik router, 2: RTK GNSS electronics, 3: NI CAN interface, 4: 4S LiPo battery, 5: GNSS receiver antenna, 6: USB connection to laptop.
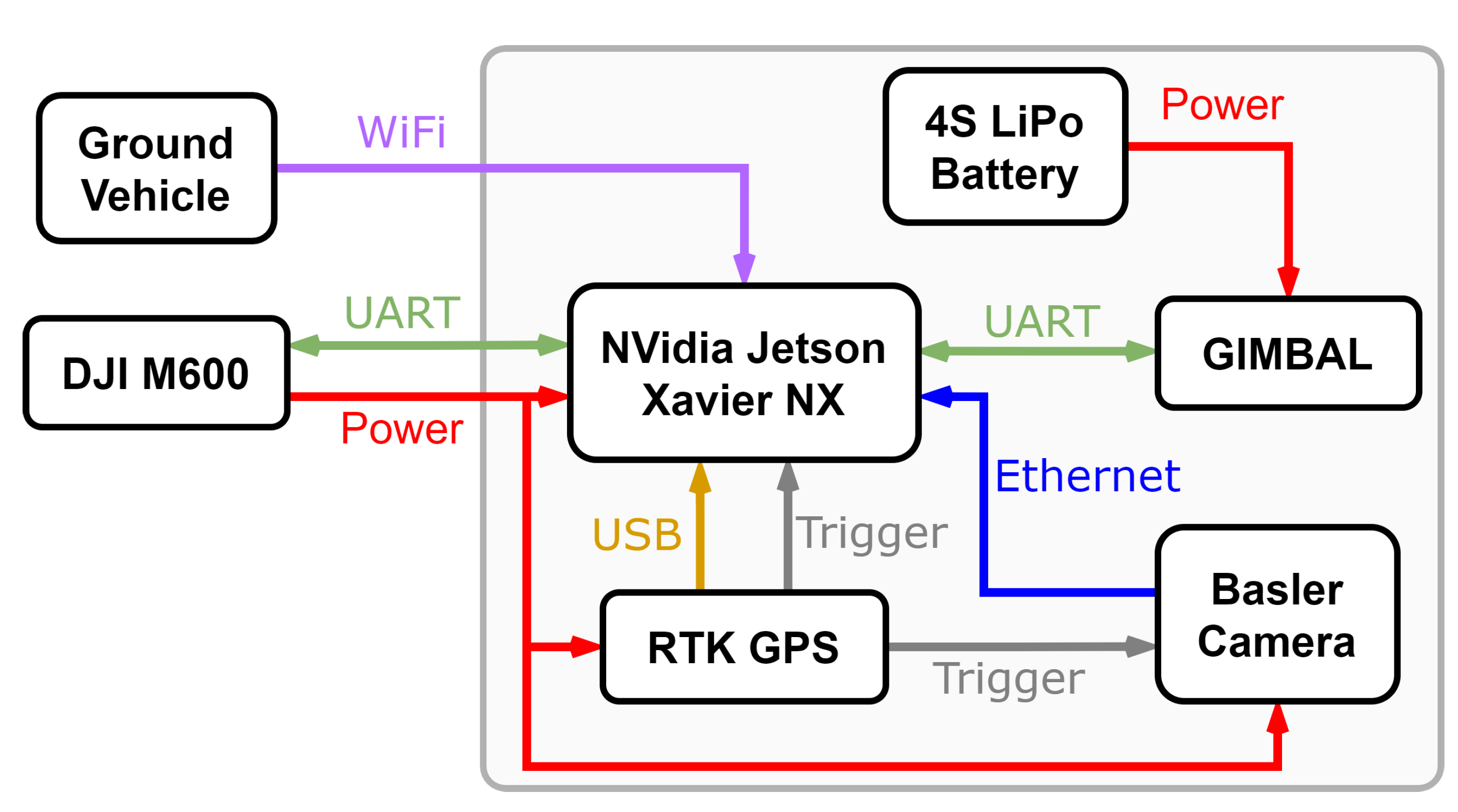
Figure 5.
Block scheme of the drone onboard hardware.
Figure 5.
Block scheme of the drone onboard hardware.
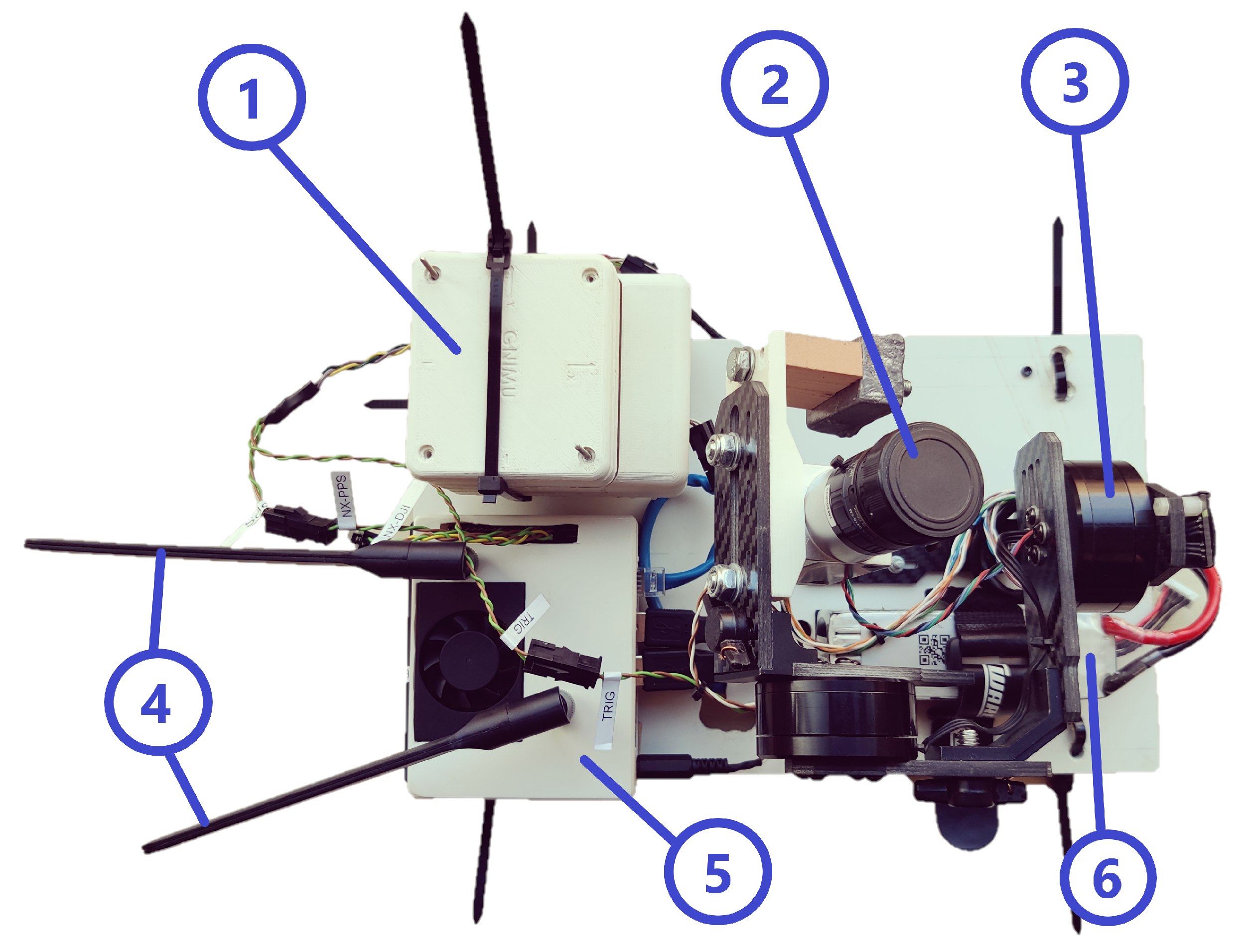
Figure 6.
Onboard hardware system of the aerial vehicle. 1: RTK GNSS electronics, 2: Basler camera, 3: Gimbal, 4: WiFi antennas, 5: Nvidia Jetson Xavier NX, 6: 4S LiPo battery.
Figure 6.
Onboard hardware system of the aerial vehicle. 1: RTK GNSS electronics, 2: Basler camera, 3: Gimbal, 4: WiFi antennas, 5: Nvidia Jetson Xavier NX, 6: 4S LiPo battery.
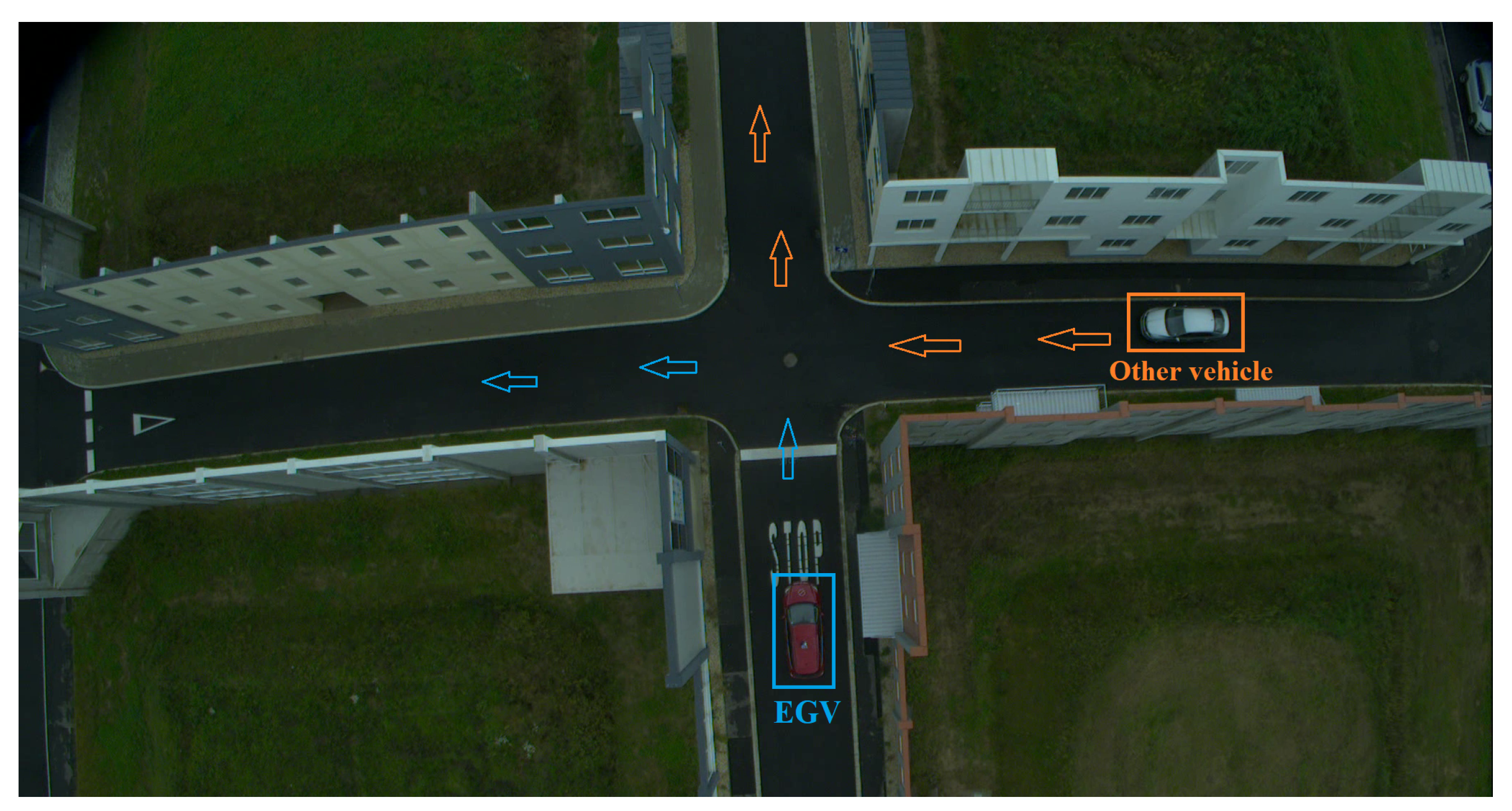
Figure 8.
An encounter scenario in ZalaZONE Smart City with EGV and other vehicle.
Figure 8.
An encounter scenario in ZalaZONE Smart City with EGV and other vehicle.
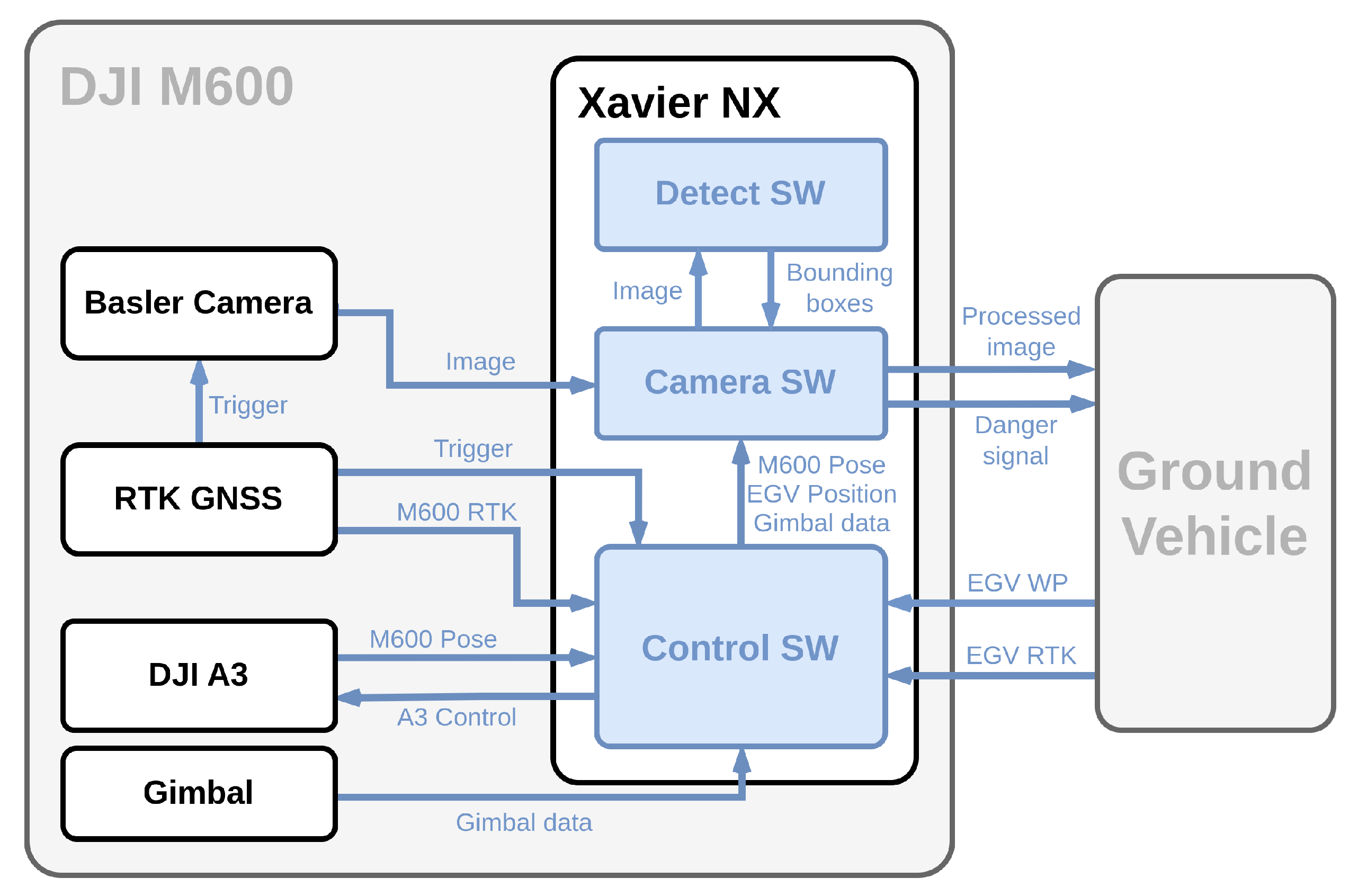
Figure 9.
Onboard software architecture and data flow of the aerial vehicle.
Figure 9.
Onboard software architecture and data flow of the aerial vehicle.
Figure 10.
Inference differences between Yolo_RL (left) and fine tuned (right) network. Note the missed car at the STOP sign in the left part.
Figure 10.
Inference differences between Yolo_RL (left) and fine tuned (right) network. Note the missed car at the STOP sign in the left part.
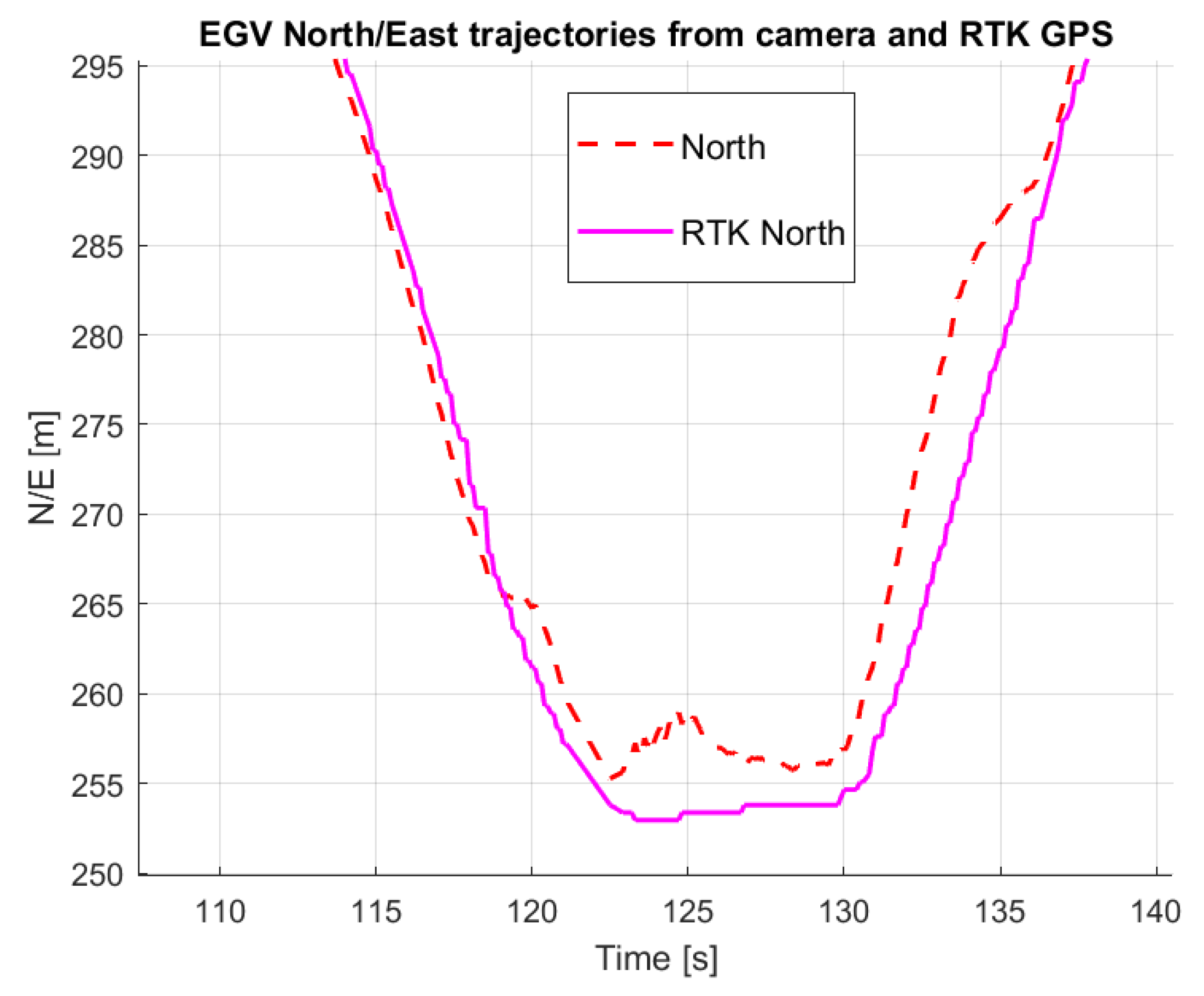
Figure 11.
Position difference between back-projected and RTK EGV North positions.
Figure 11.
Position difference between back-projected and RTK EGV North positions.
Figure 12.
An encounter in the feasibility demonstration.
Figure 12.
An encounter in the feasibility demonstration.
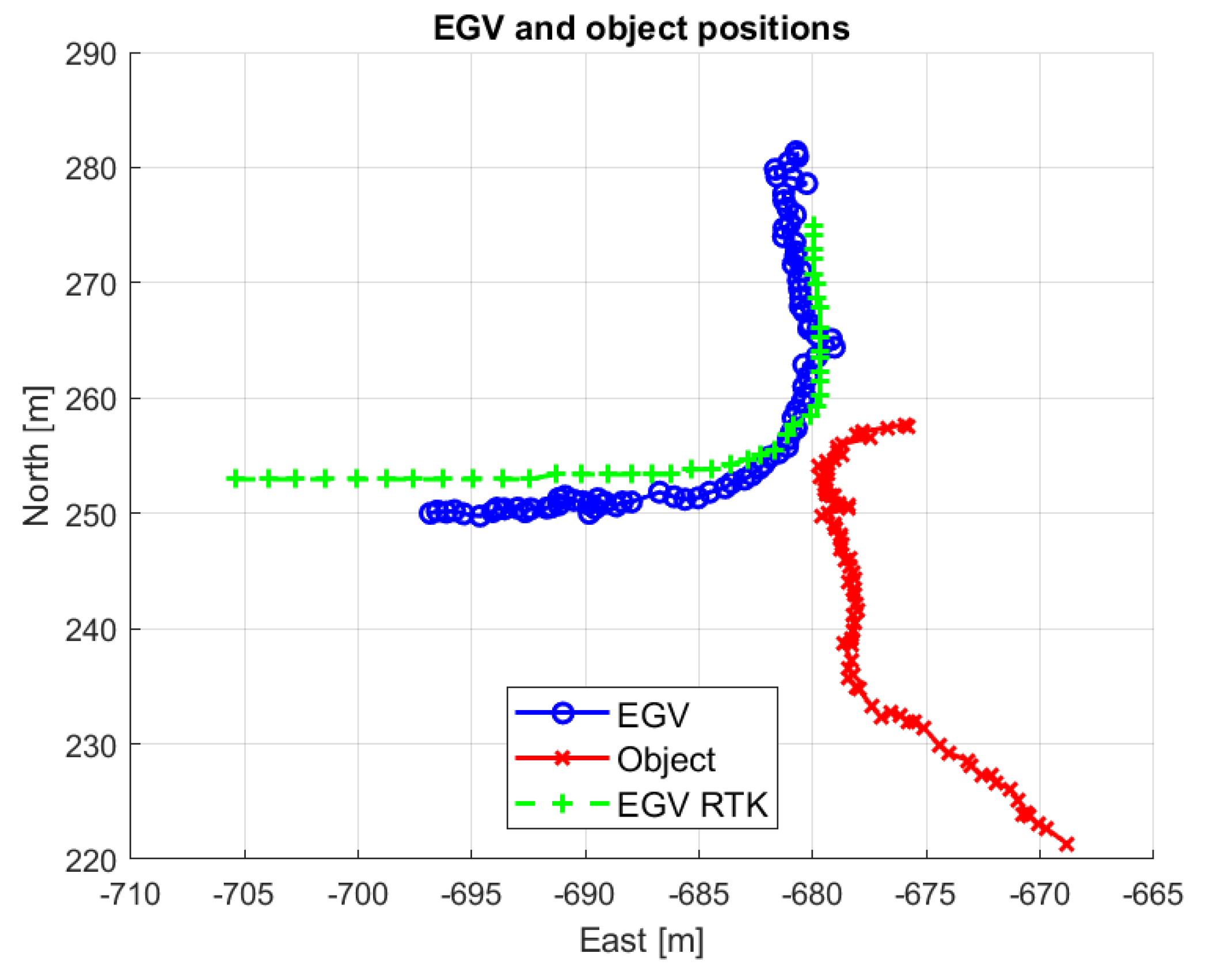
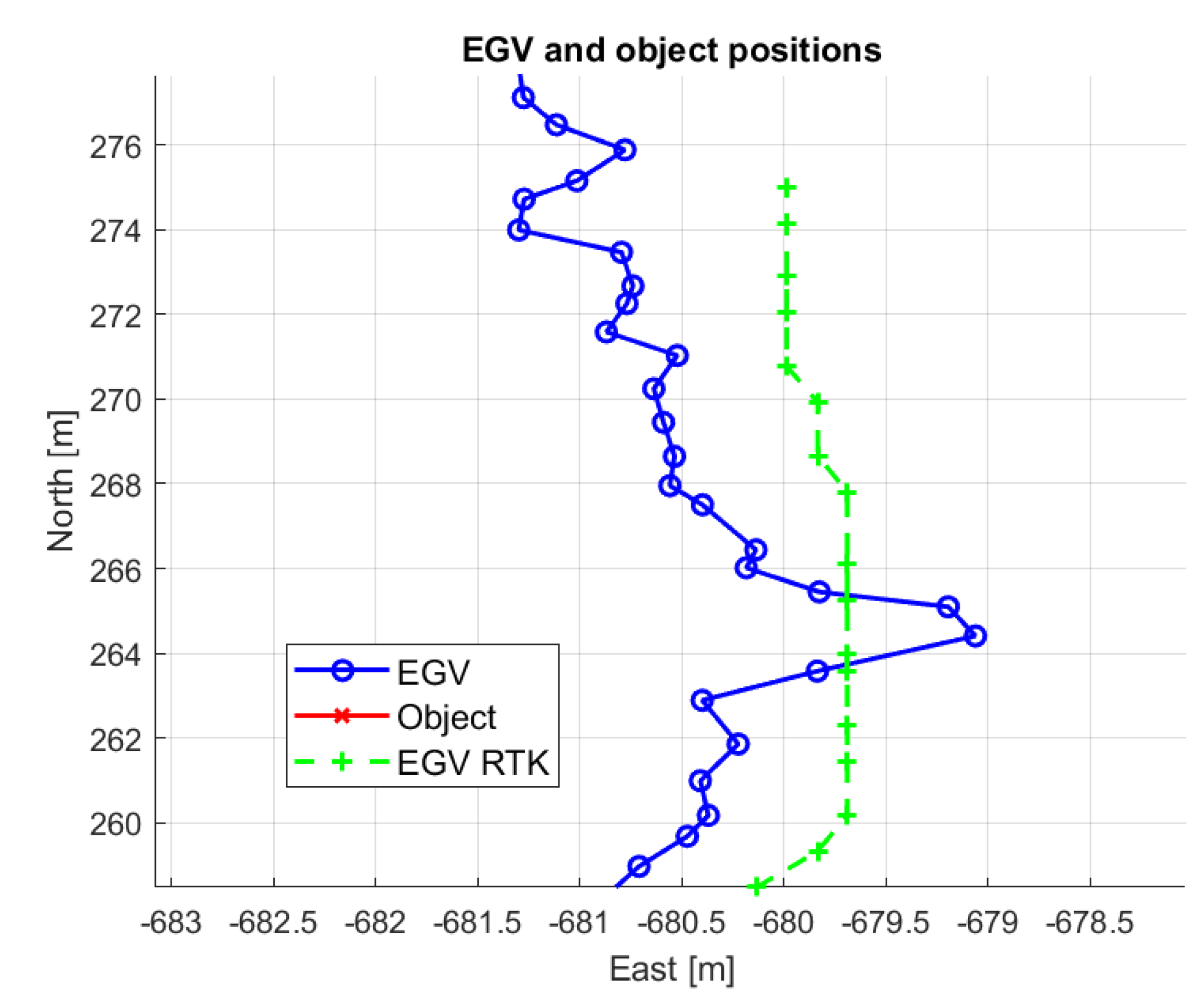
Figure 13.
Zoom of back-projected and RTK GNSS logged EGV positions.
Figure 13.
Zoom of back-projected and RTK GNSS logged EGV positions.
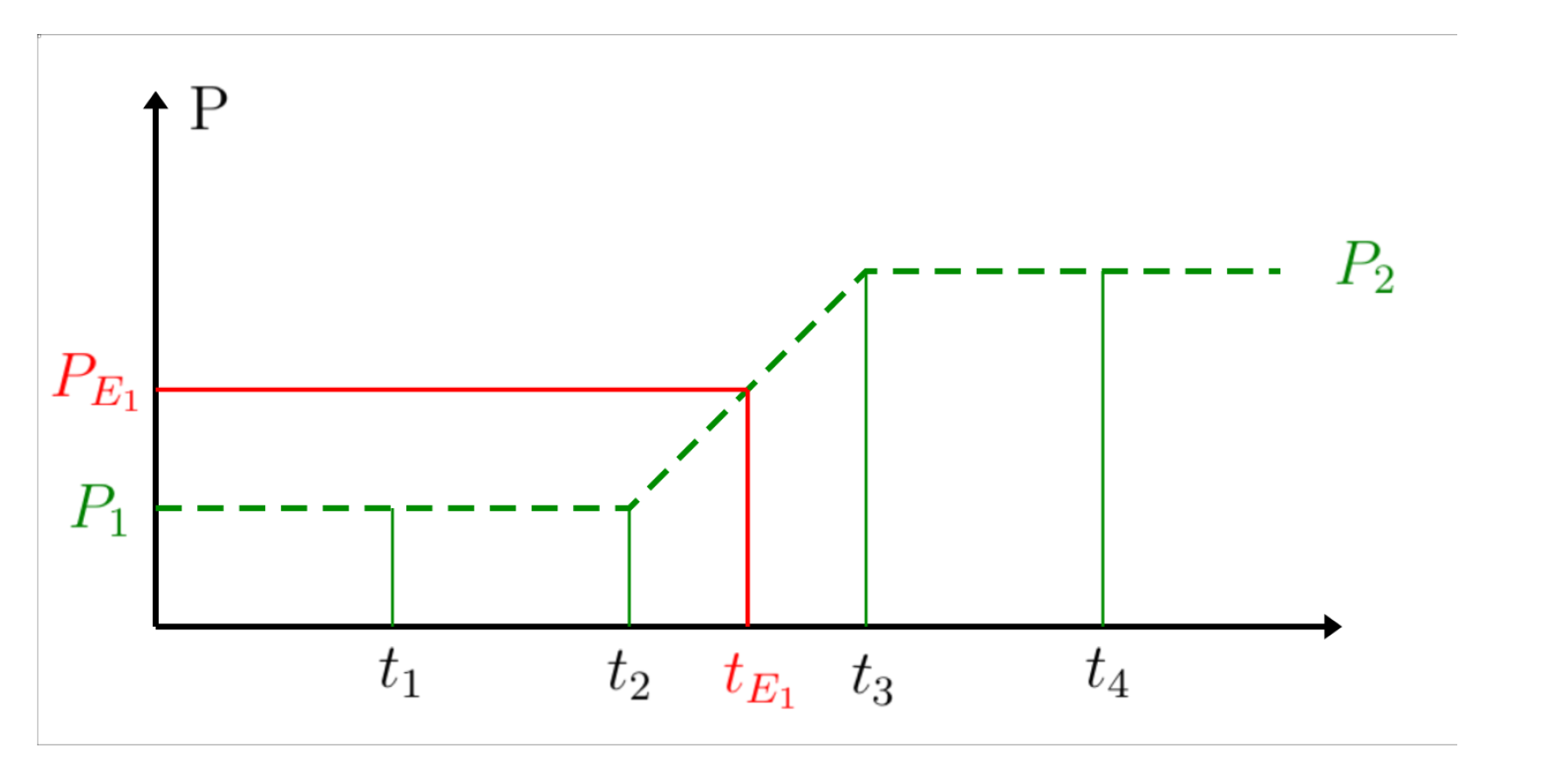
Figure 14.
Definition of Encoder Event (EE).
Figure 14.
Definition of Encoder Event (EE).
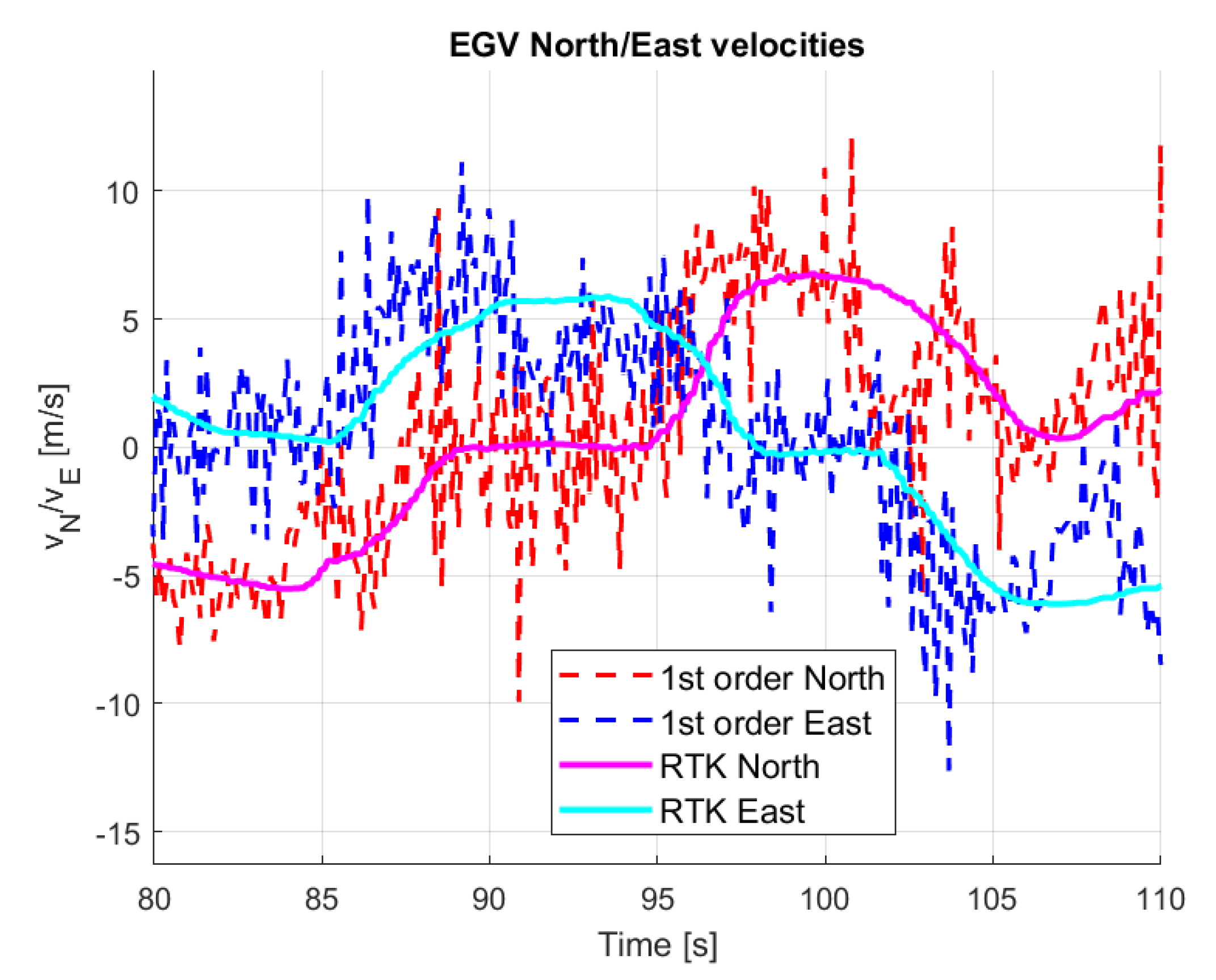
Figure 15.
Velocity estimation with 1st order differentiation.
Figure 15.
Velocity estimation with 1st order differentiation.
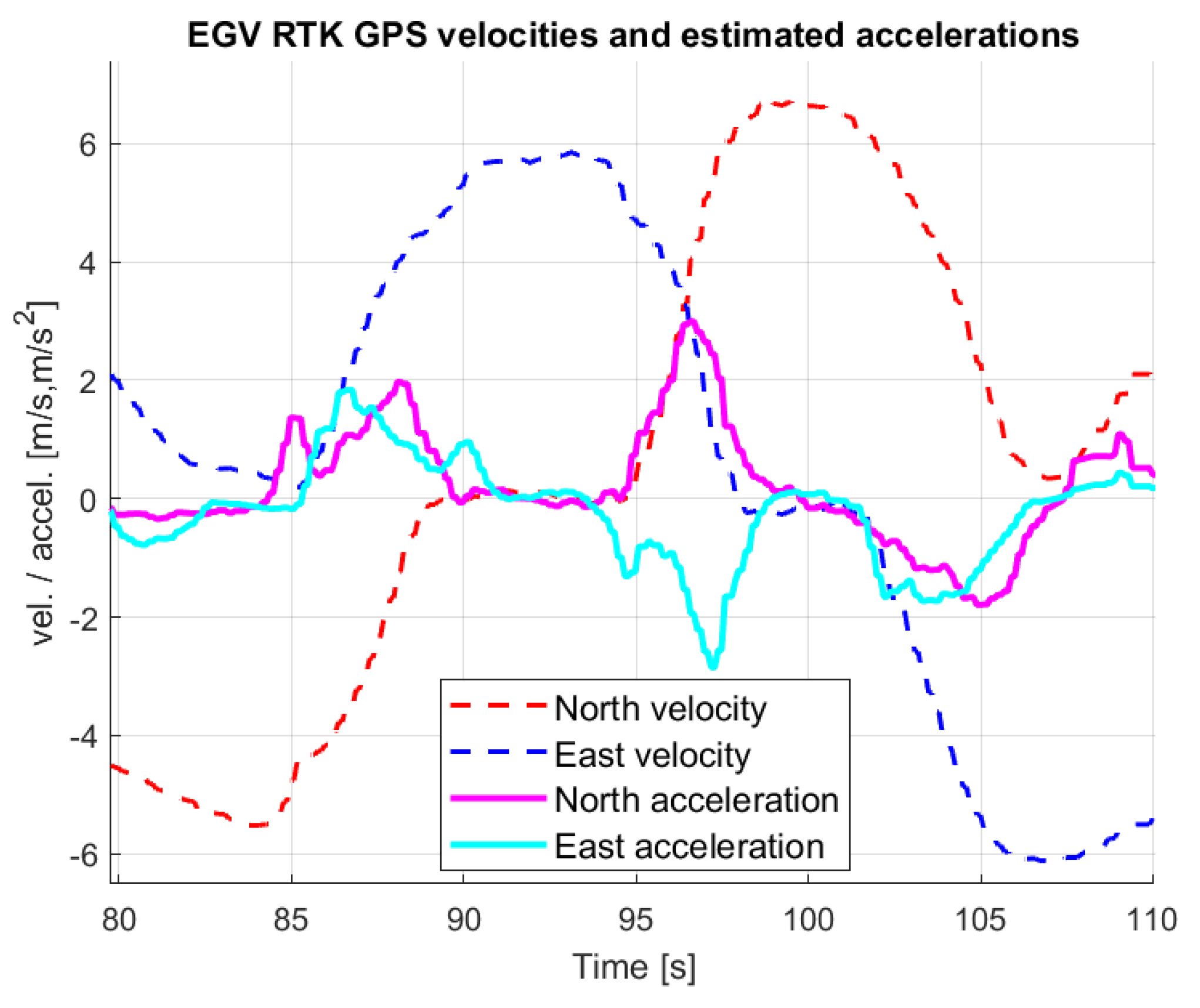
Figure 16.
EGV RTK GNSS velocity and estimated acceleration.
Figure 16.
EGV RTK GNSS velocity and estimated acceleration.
Figure 17.
EGV velocity estimation with SDKF position smoothing and line fitting.
Figure 17.
EGV velocity estimation with SDKF position smoothing and line fitting.
Figure 18.
EGV acceleration estimation with two state Kalman filter.
Figure 18.
EGV acceleration estimation with two state Kalman filter.
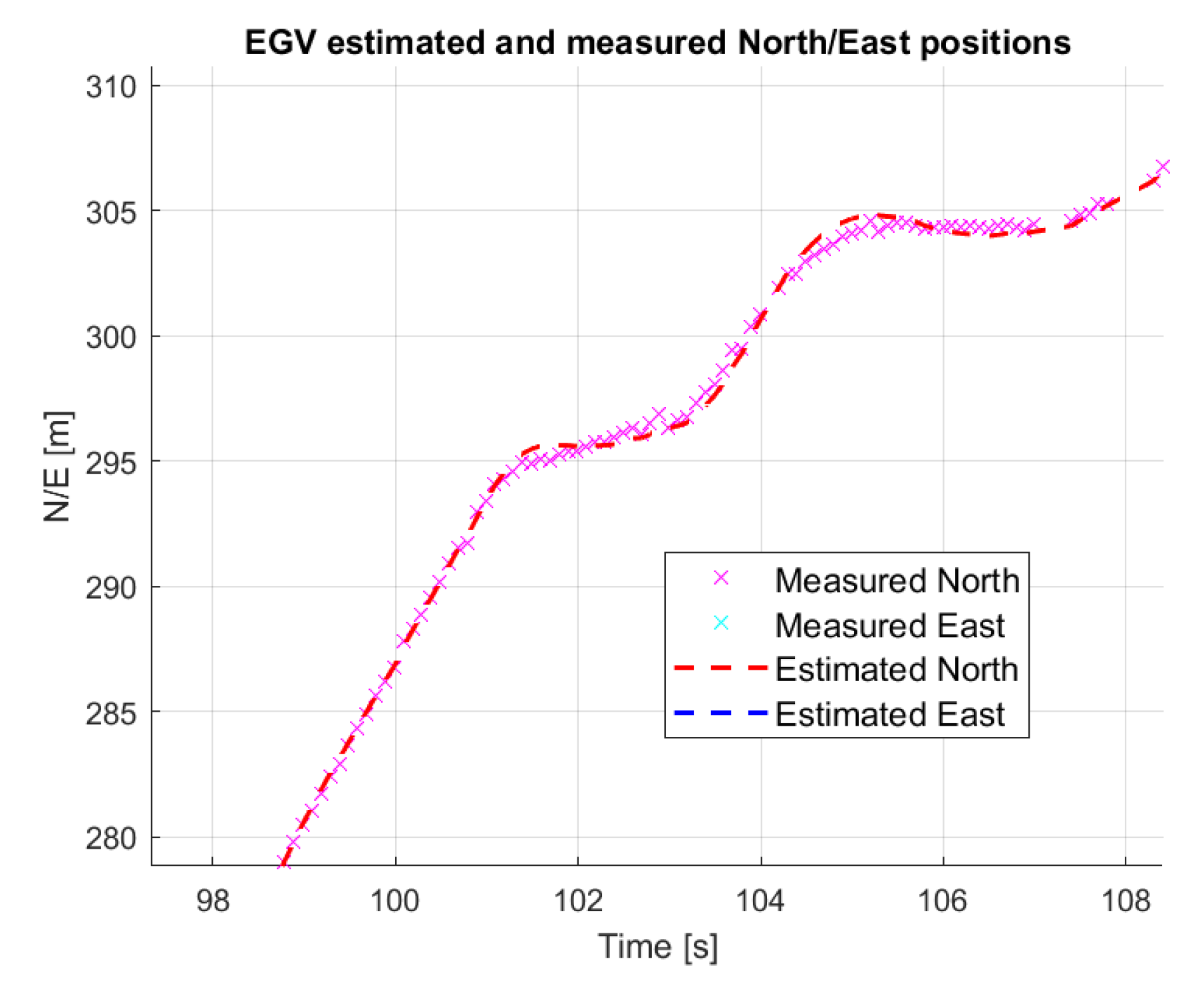
Figure 19.
EGV estimated and measured position.
Figure 19.
EGV estimated and measured position.
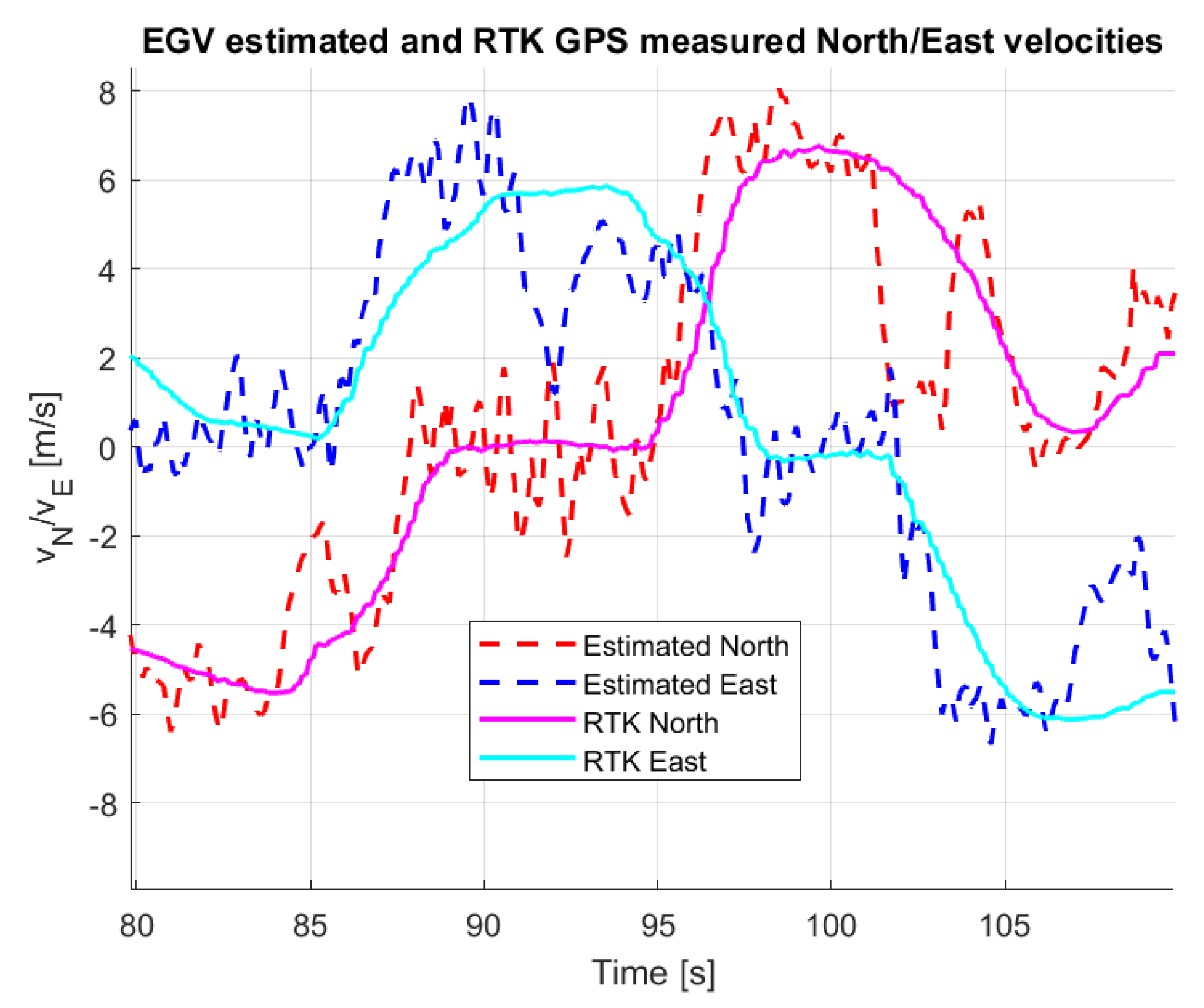
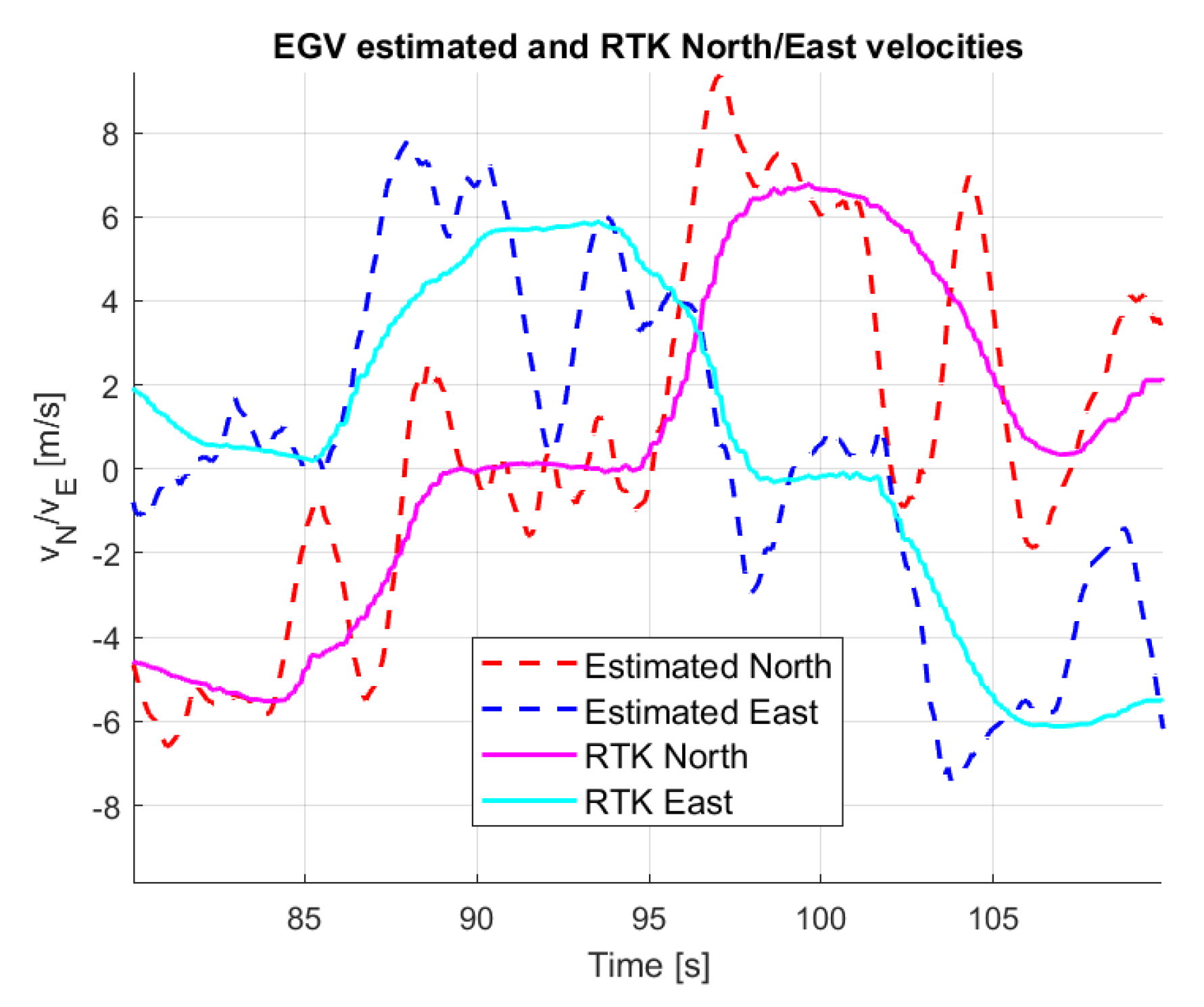
Figure 20.
EGV estimated and RTK GNSS measured velocity.
Figure 20.
EGV estimated and RTK GNSS measured velocity.
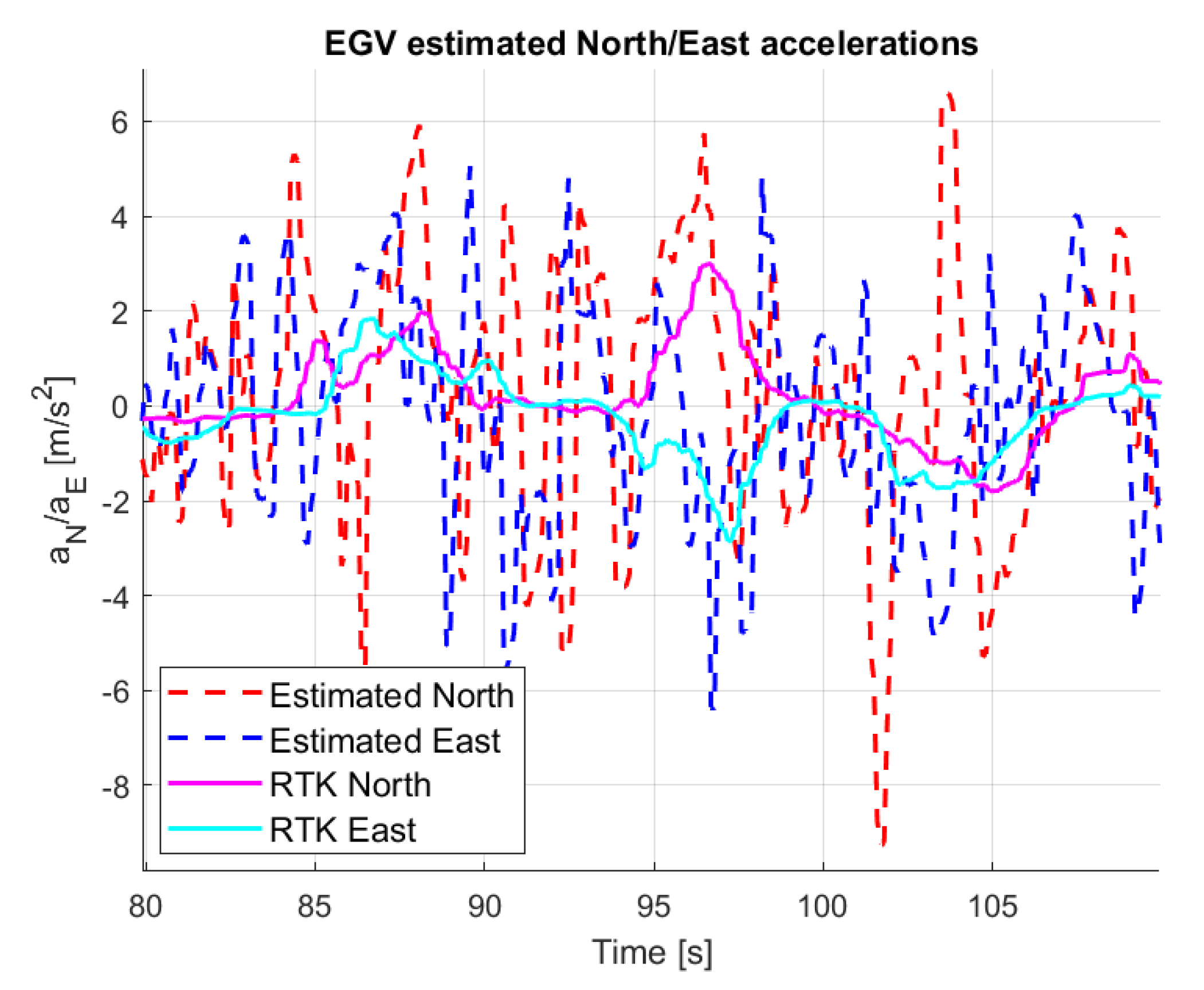
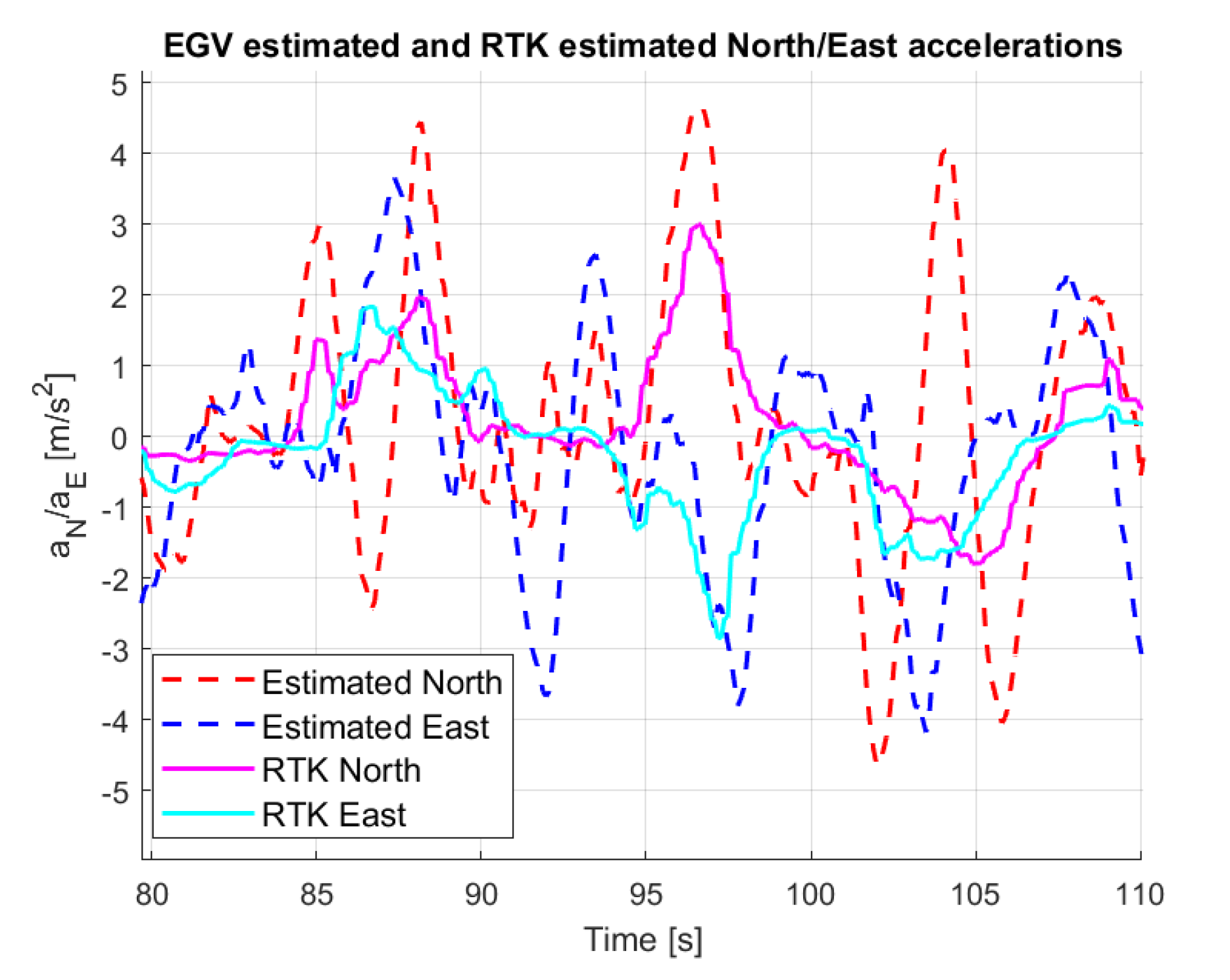
Figure 21.
EGV estimated and RTK GNSS estimated acceleration.
Figure 21.
EGV estimated and RTK GNSS estimated acceleration.
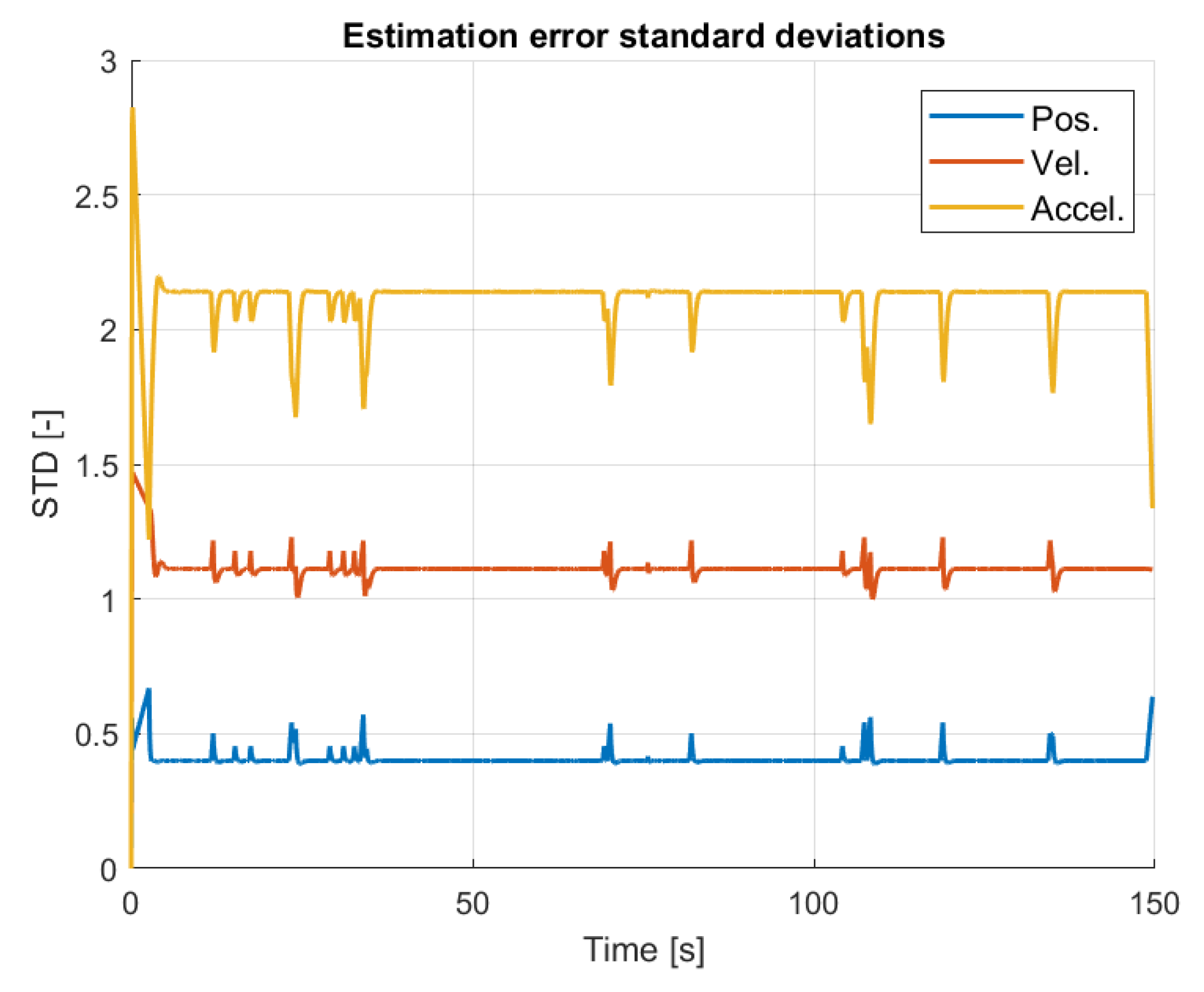
Figure 22.
Standard deviations of state estimates.
Figure 22.
Standard deviations of state estimates.
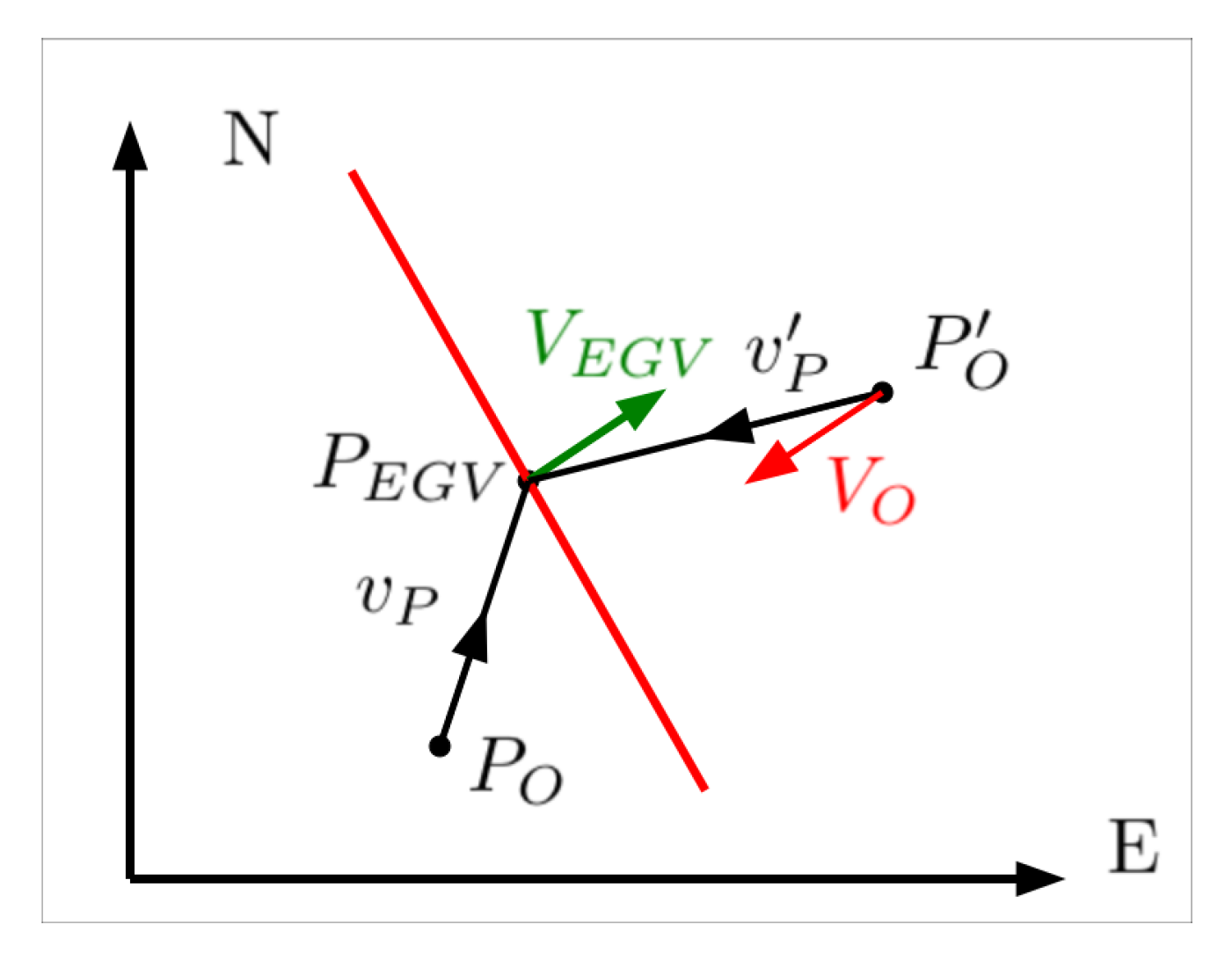
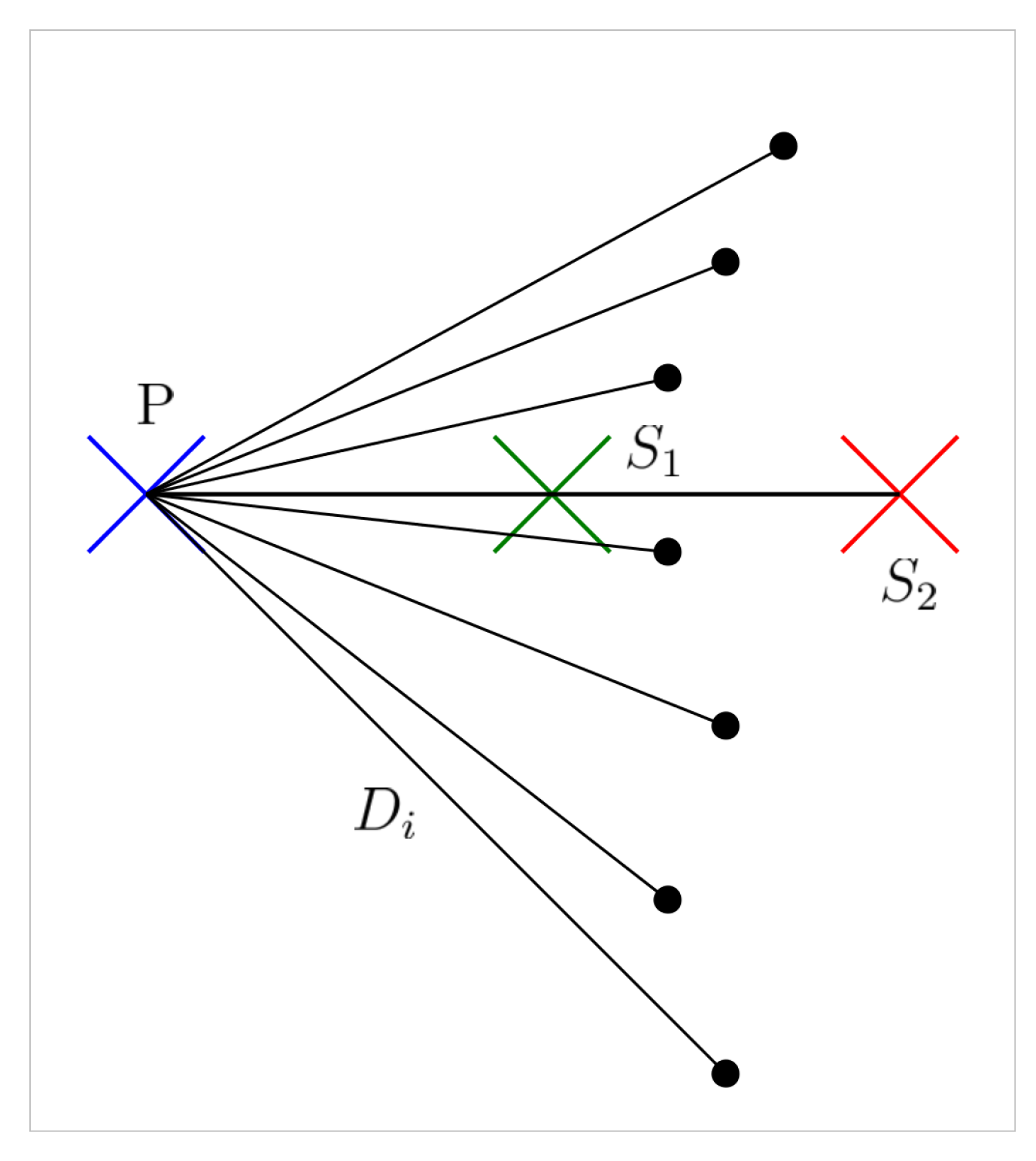
Figure 23.
Special relations of EGV and the other object.
Figure 23.
Special relations of EGV and the other object.
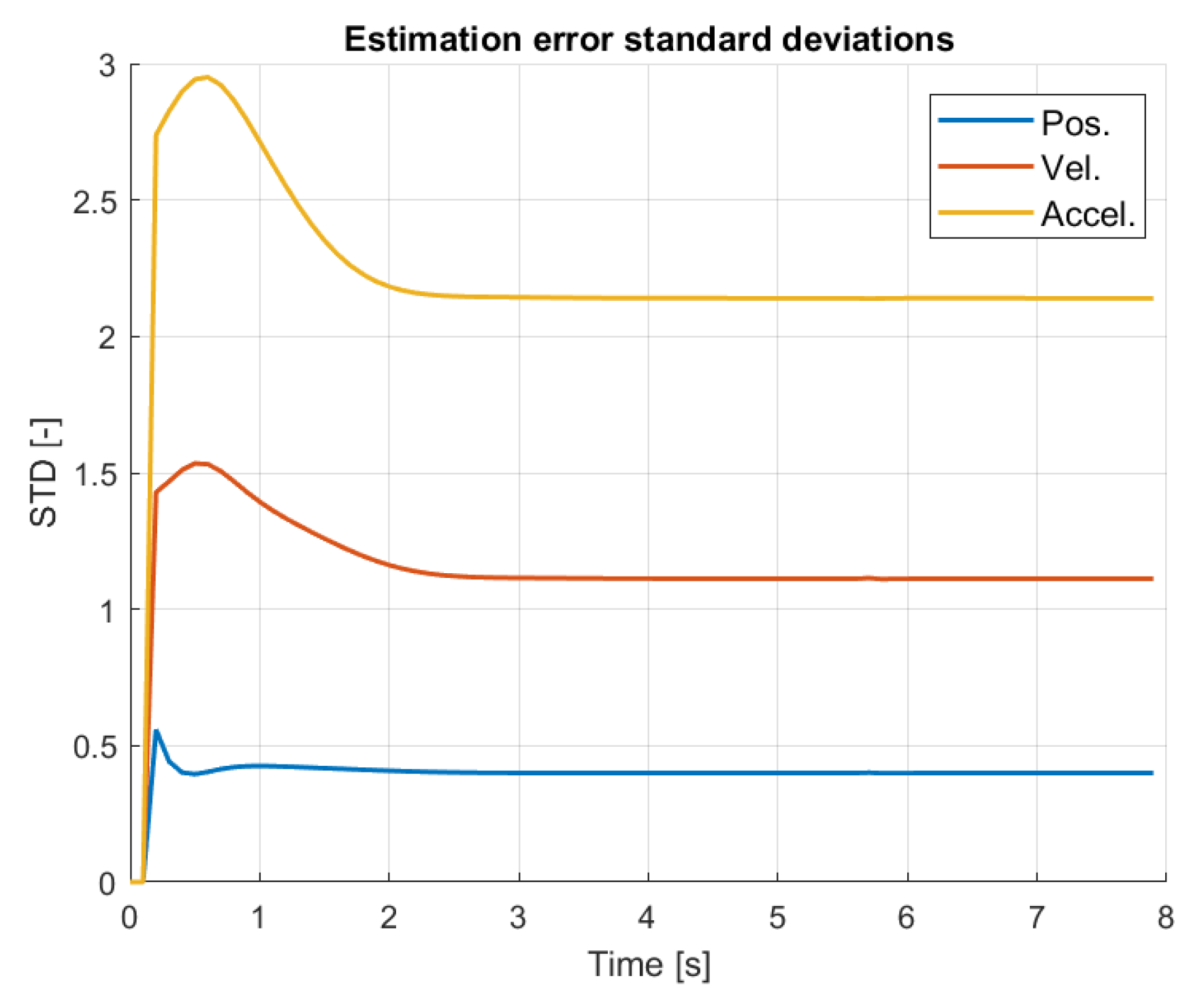
Figure 24.
STD transients.
Figure 24.
STD transients.
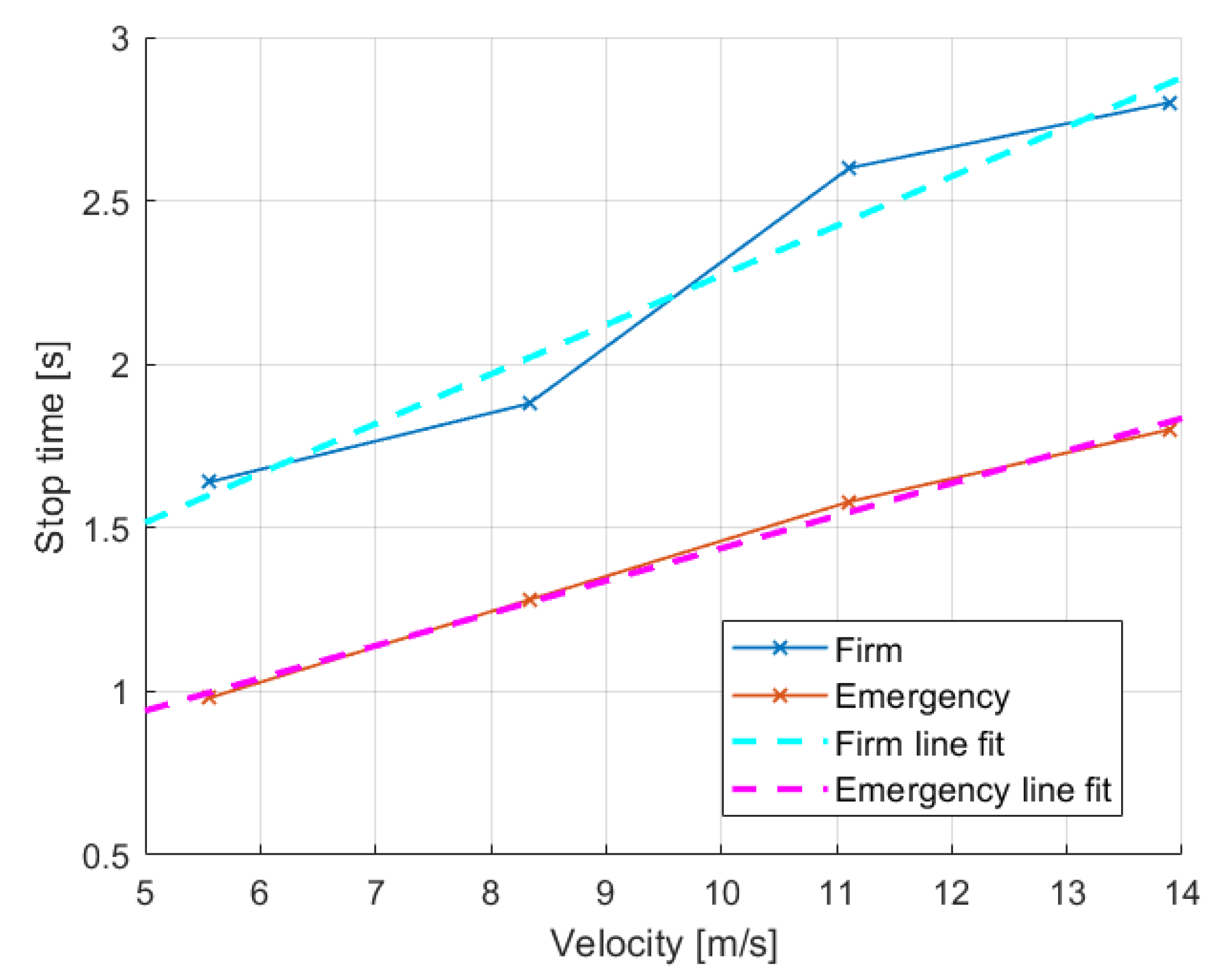
Figure 25.
Car braking times from different velocities.
Figure 25.
Car braking times from different velocities.
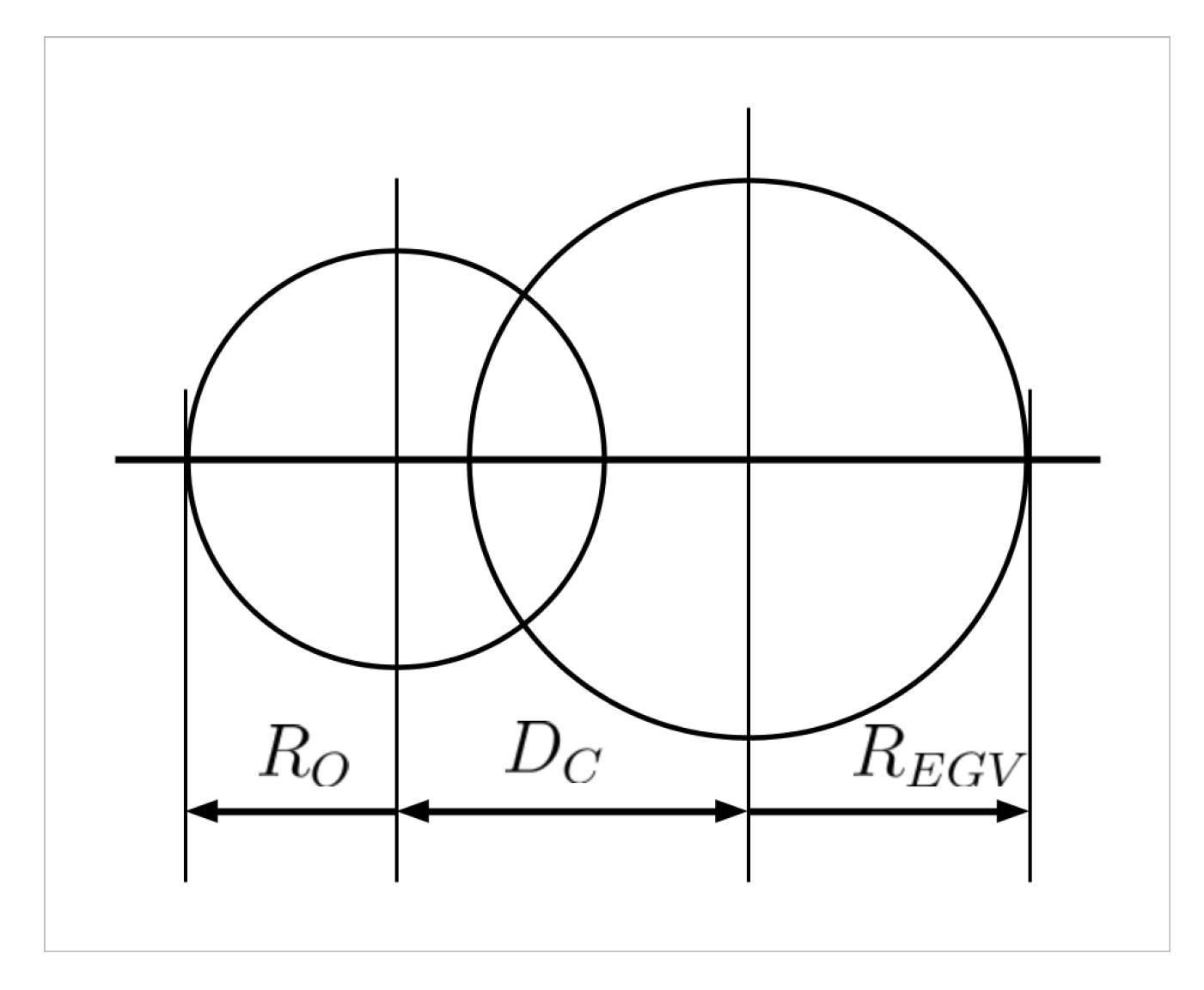
Figure 26.
Data for circle overlap measure calculation.
Figure 26.
Data for circle overlap measure calculation.
Figure 27.
Relation of EGV stopped position and other vehicle trajectory.
Figure 27.
Relation of EGV stopped position and other vehicle trajectory.
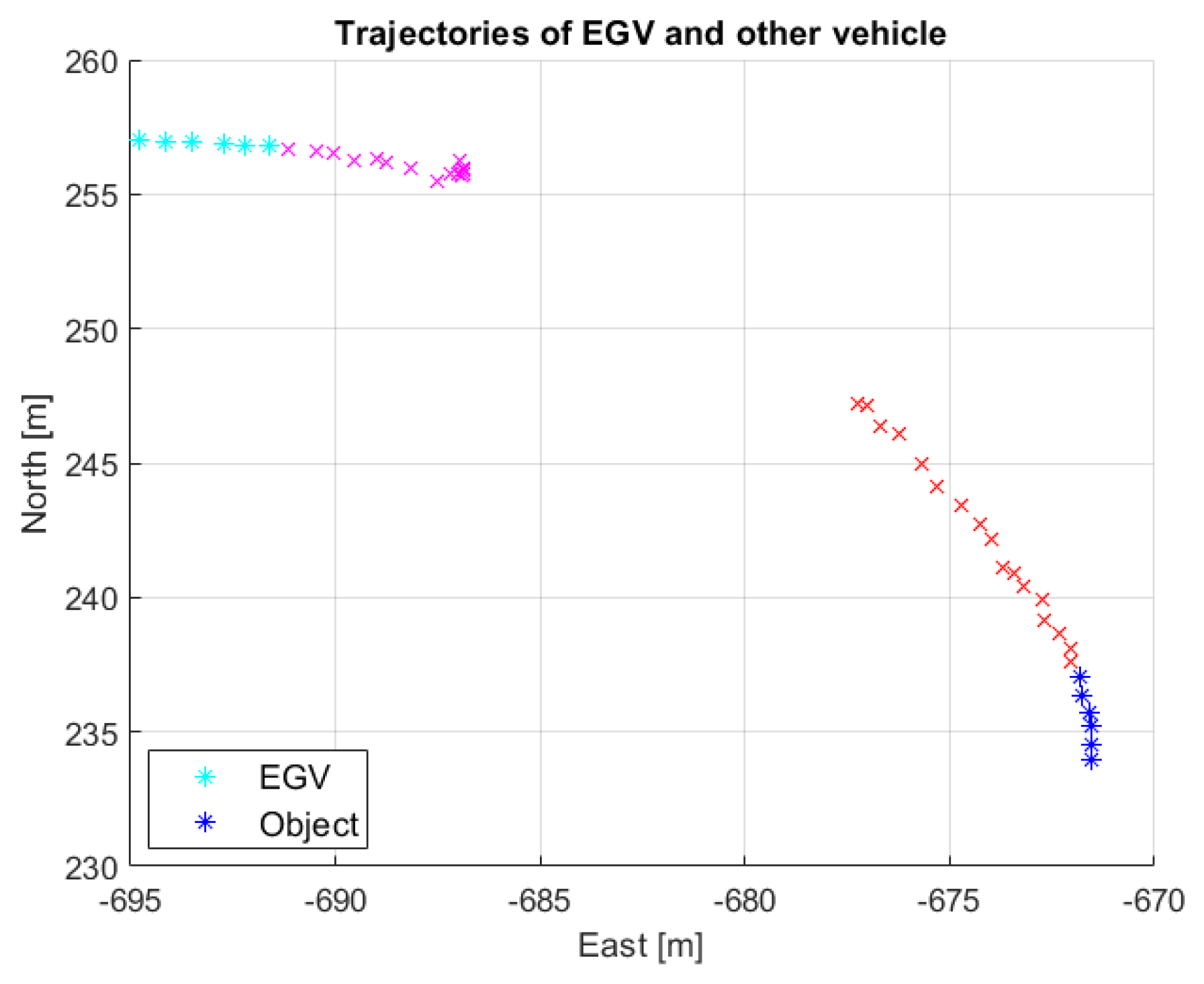
Figure 28.
Short vehicle trajectories in flight 3 encounter 3 (magenta and red colors show the sections with valid danger notification).
Figure 28.
Short vehicle trajectories in flight 3 encounter 3 (magenta and red colors show the sections with valid danger notification).
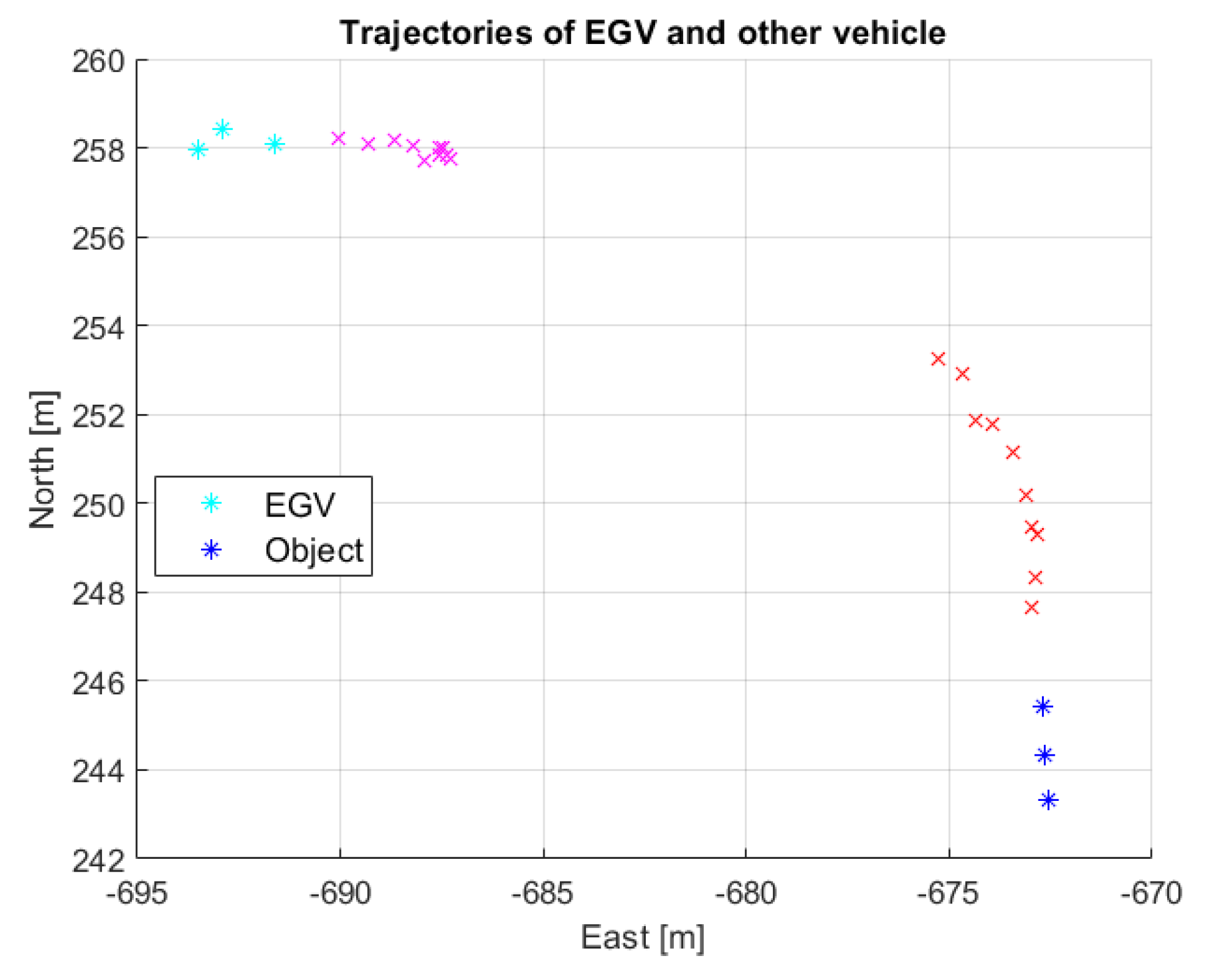
Figure 29.
Short vehicle trajectories in flight 4 encounter 3 (magenta and red colors show the sections with valid danger notification).
Figure 29.
Short vehicle trajectories in flight 4 encounter 3 (magenta and red colors show the sections with valid danger notification).
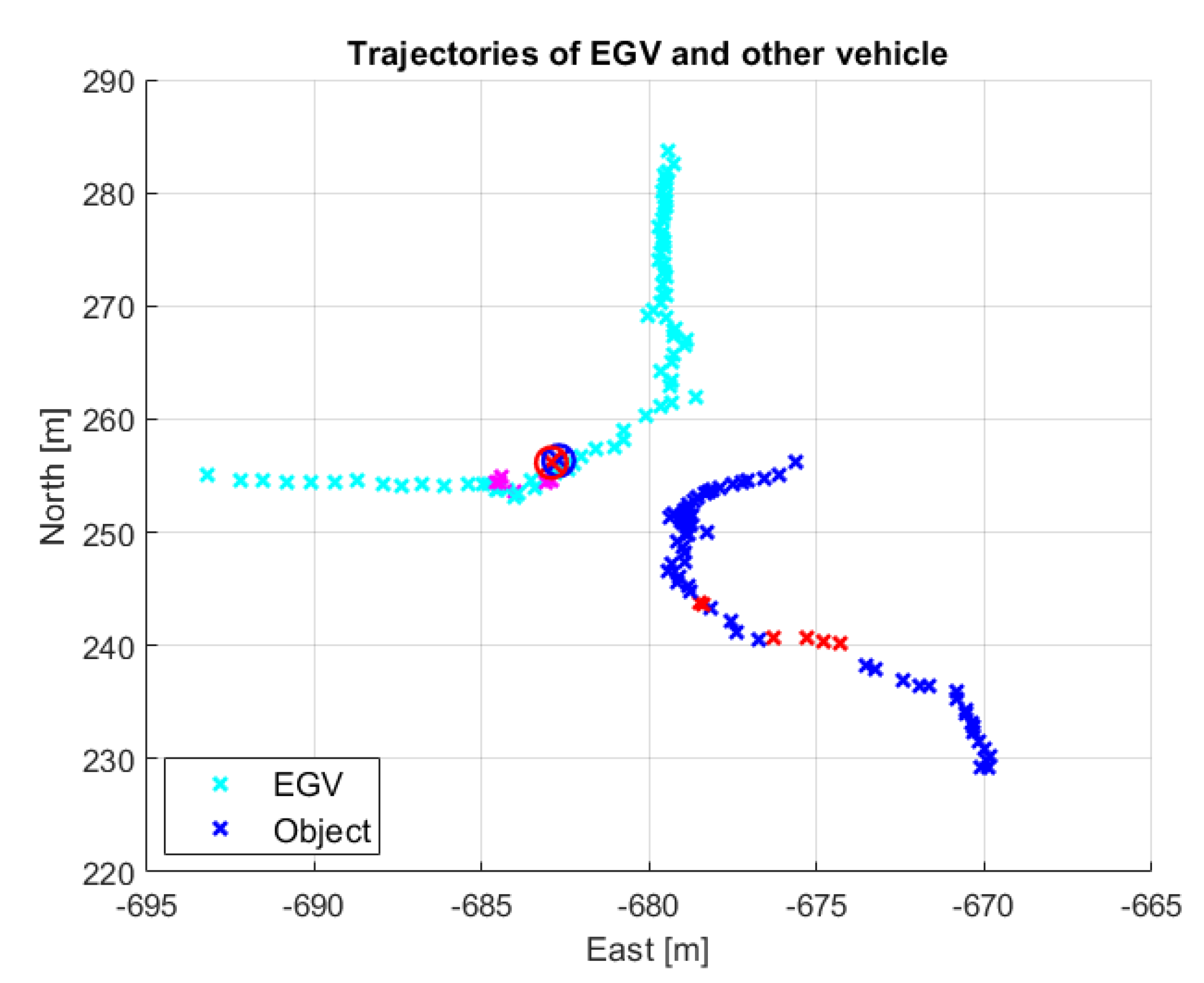
Figure 30.
Decision with the basic method for the 2nd encounter of flight 2. Red and magenta colors show the sections of danger notification, while the red circle with cross is the emergency and the blue circle with cross is the firm braking stopped position of the EGV, respectively.
Figure 30.
Decision with the basic method for the 2nd encounter of flight 2. Red and magenta colors show the sections of danger notification, while the red circle with cross is the emergency and the blue circle with cross is the firm braking stopped position of the EGV, respectively.
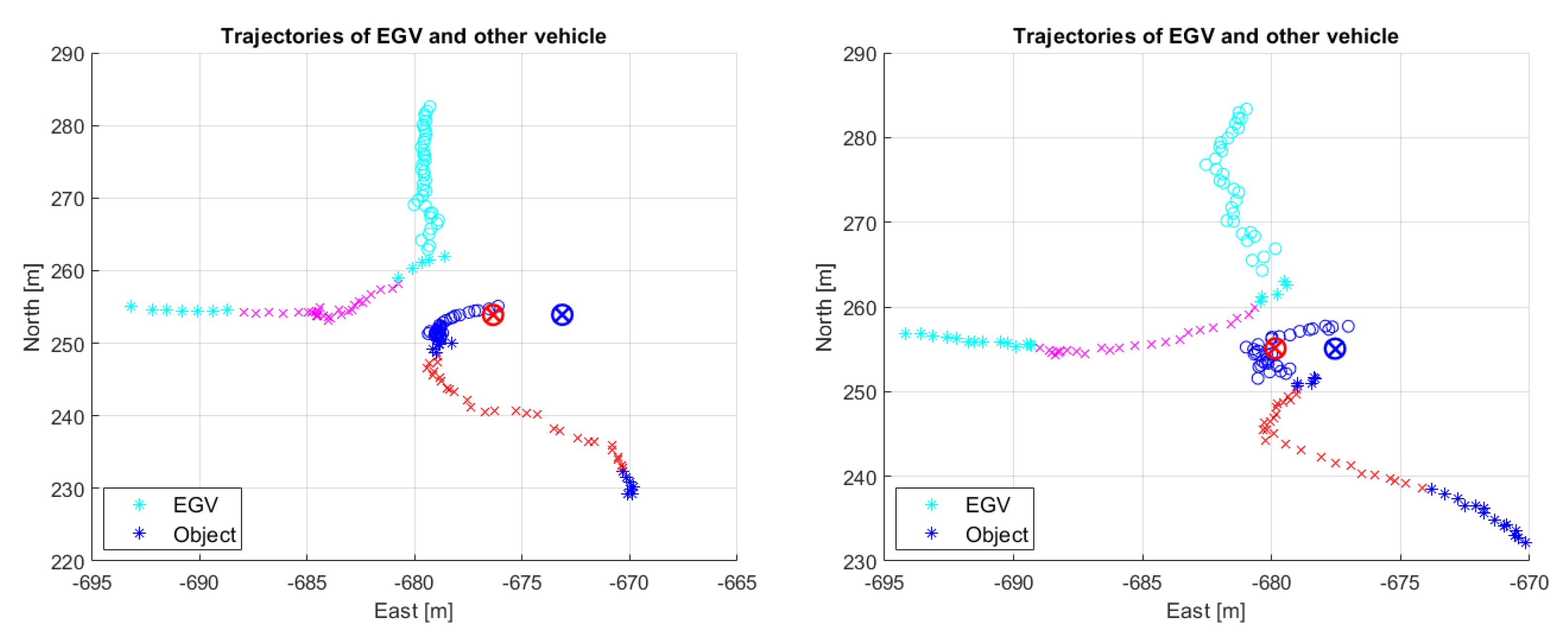
Figure 31.
Second encounters of flight 2 (left) and 3 (right) with improved decision. Red and magenta colors show the sections of danger notification, while the red circle with cross is the emergency and the blue circle with cross is the firm braking predicted stopped position of the EGV, respectively.
Figure 31.
Second encounters of flight 2 (left) and 3 (right) with improved decision. Red and magenta colors show the sections of danger notification, while the red circle with cross is the emergency and the blue circle with cross is the firm braking predicted stopped position of the EGV, respectively.
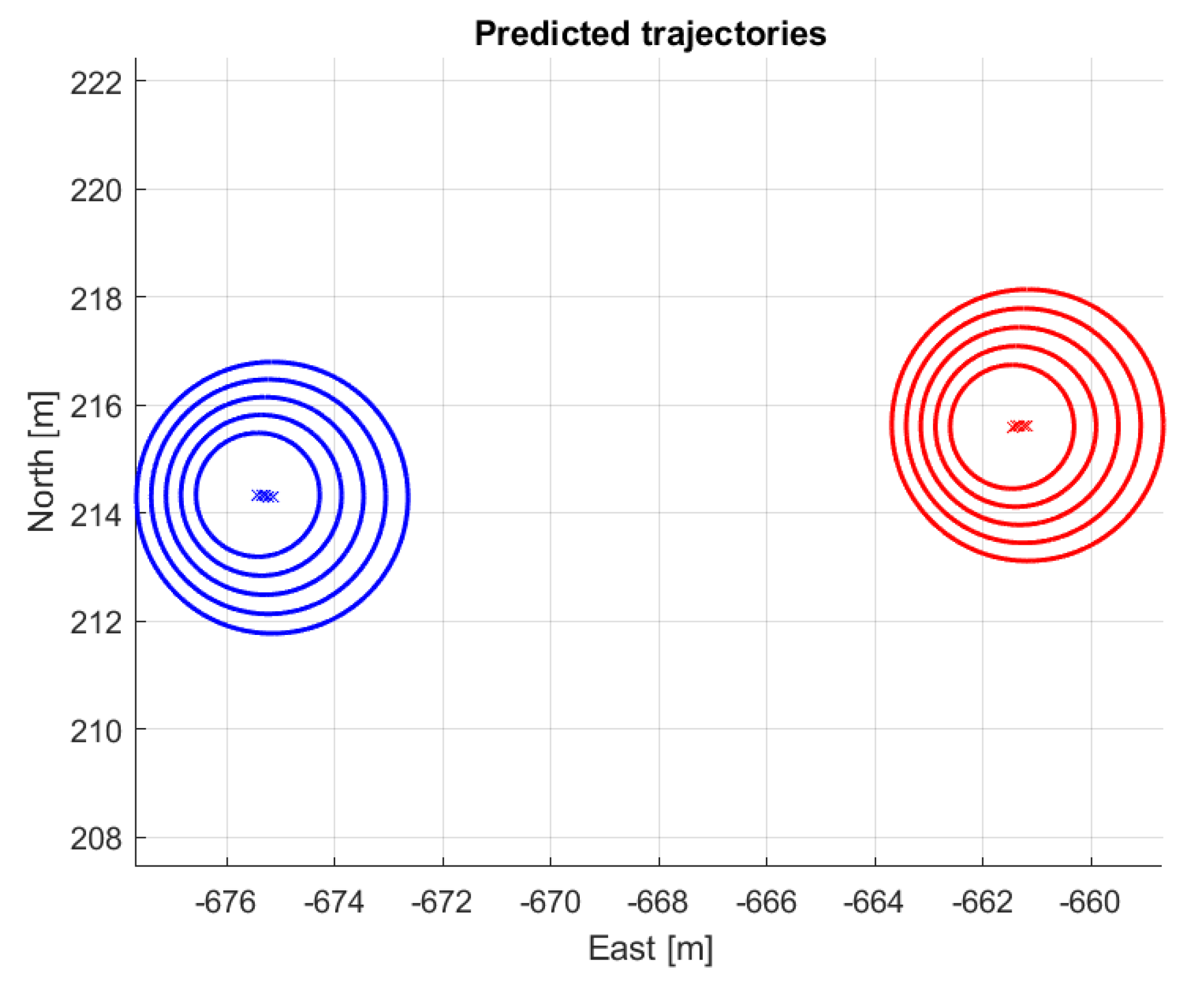
Figure 32.
Motion prediction for steady vehicles (blue EGV, red other vehicle).
Figure 32.
Motion prediction for steady vehicles (blue EGV, red other vehicle).
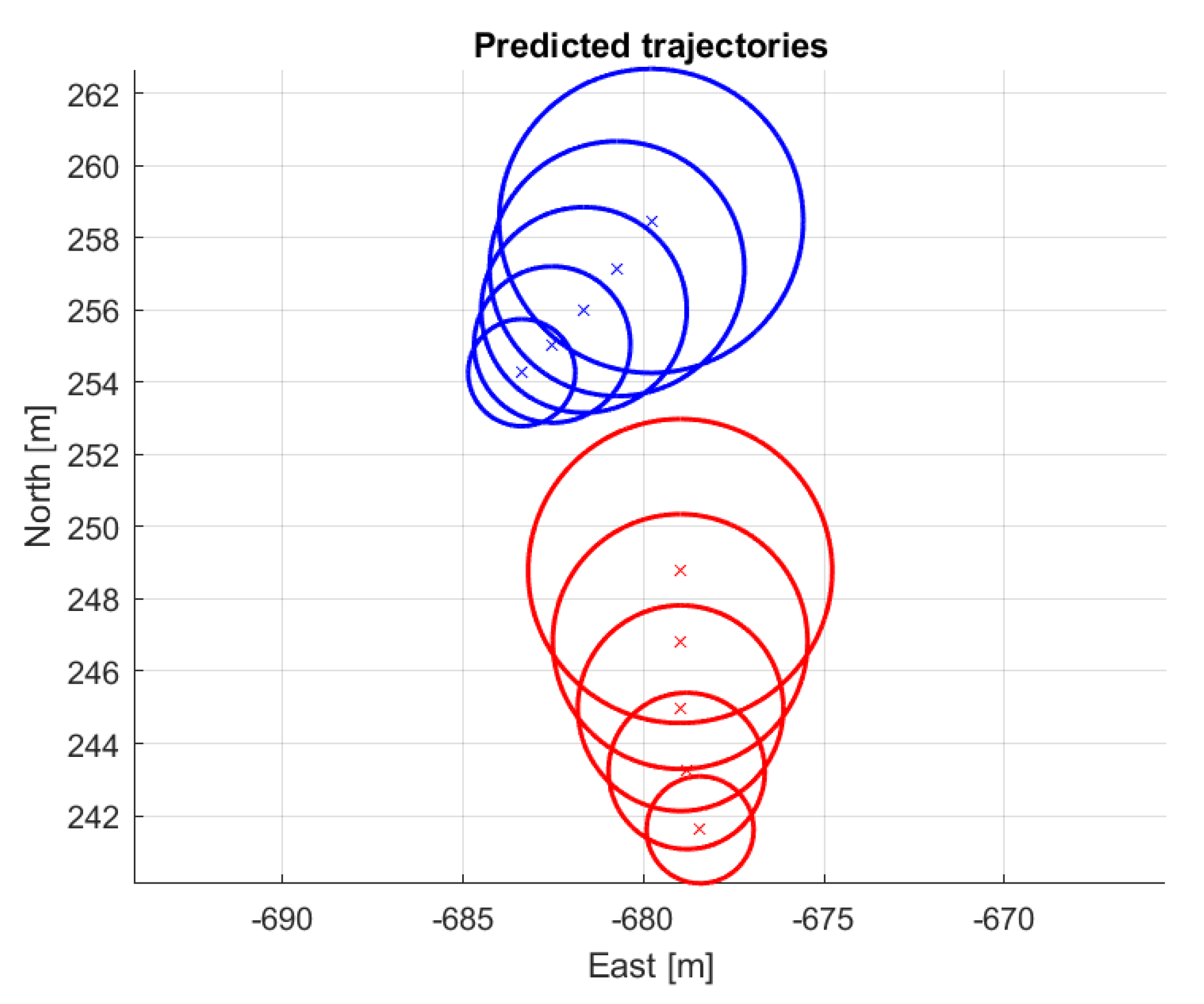
Figure 33.
Motion prediction for moving vehicles (blue EGV, red other vehicle).
Figure 33.
Motion prediction for moving vehicles (blue EGV, red other vehicle).
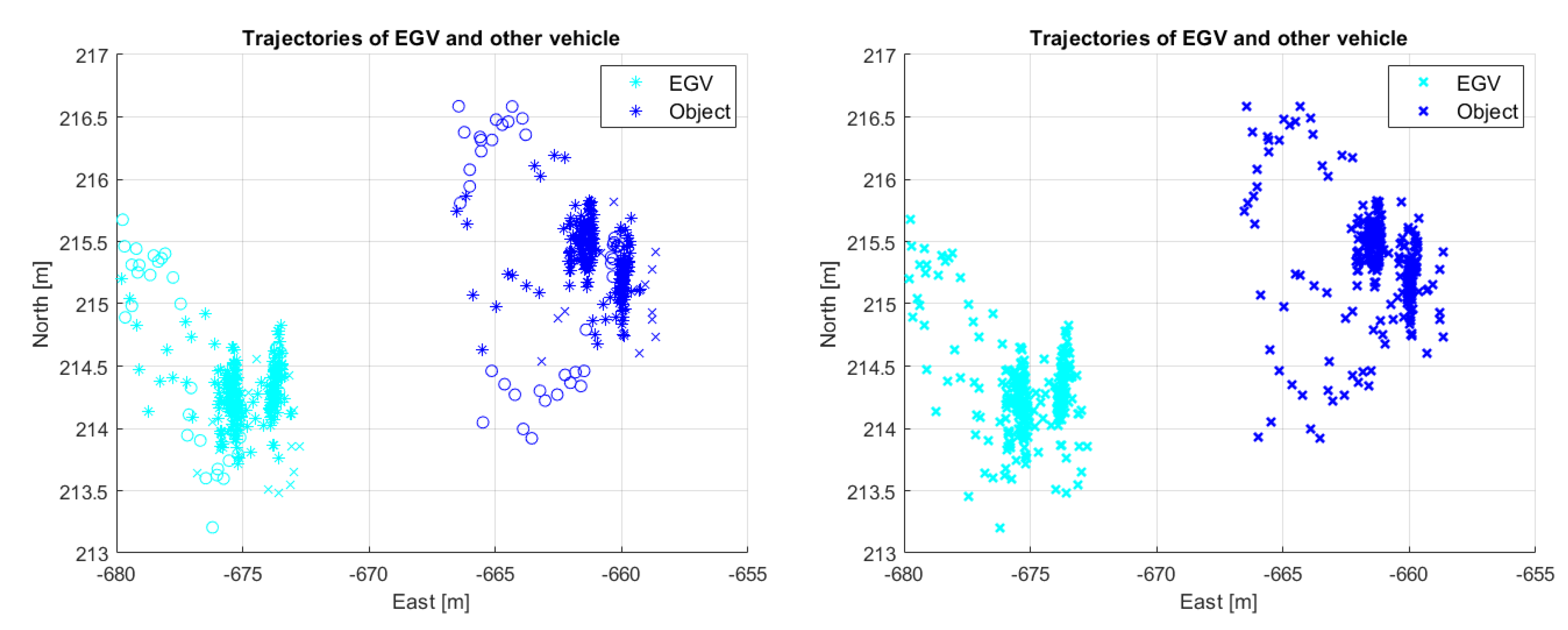
Figure 34.
Decisions for steady objects (left: the improved method, * means no decision, circle means object behind EGV, × means object in front of EGV; right: the basic method).
Figure 34.
Decisions for steady objects (left: the improved method, * means no decision, circle means object behind EGV, × means object in front of EGV; right: the basic method).
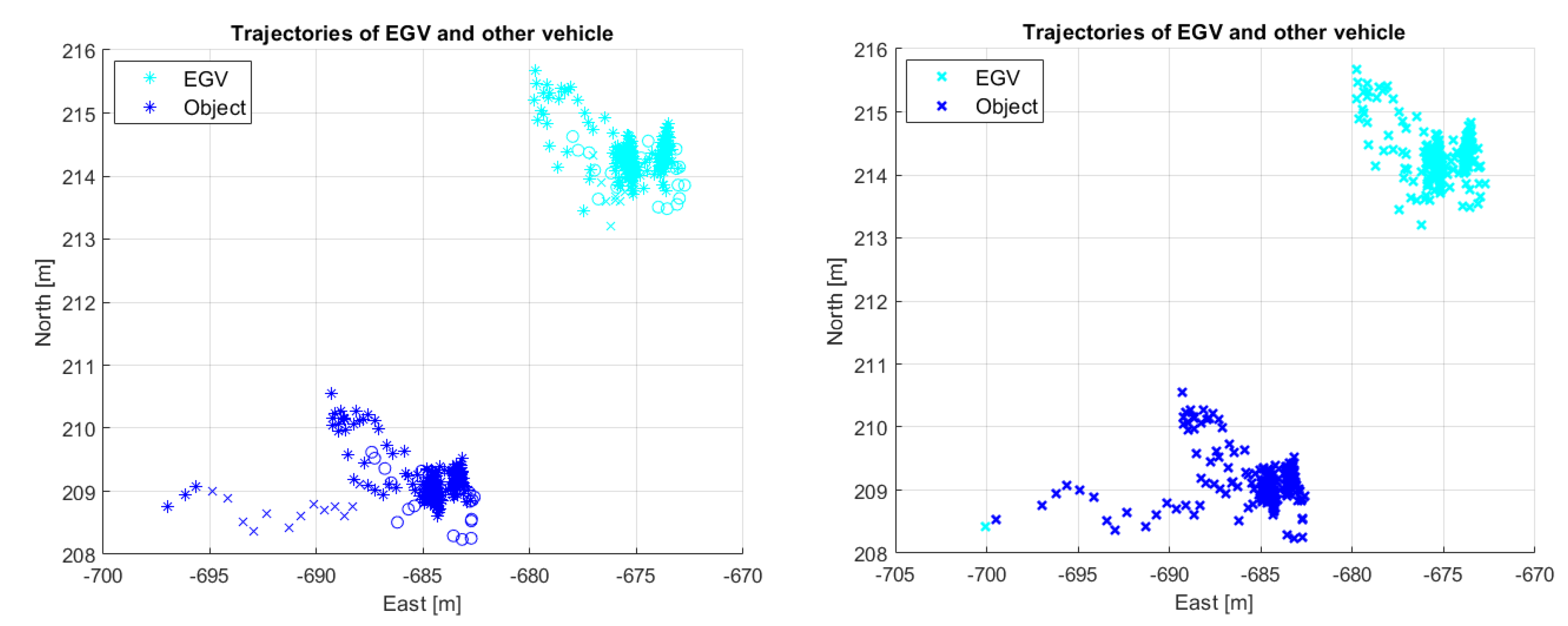
Figure 35.
Decisions for steady then moving objects (left: the improved method, * means no decision, circle means object behind EGV, × means object in front of EGV; right: the basic method).
Figure 35.
Decisions for steady then moving objects (left: the improved method, * means no decision, circle means object behind EGV, × means object in front of EGV; right: the basic method).
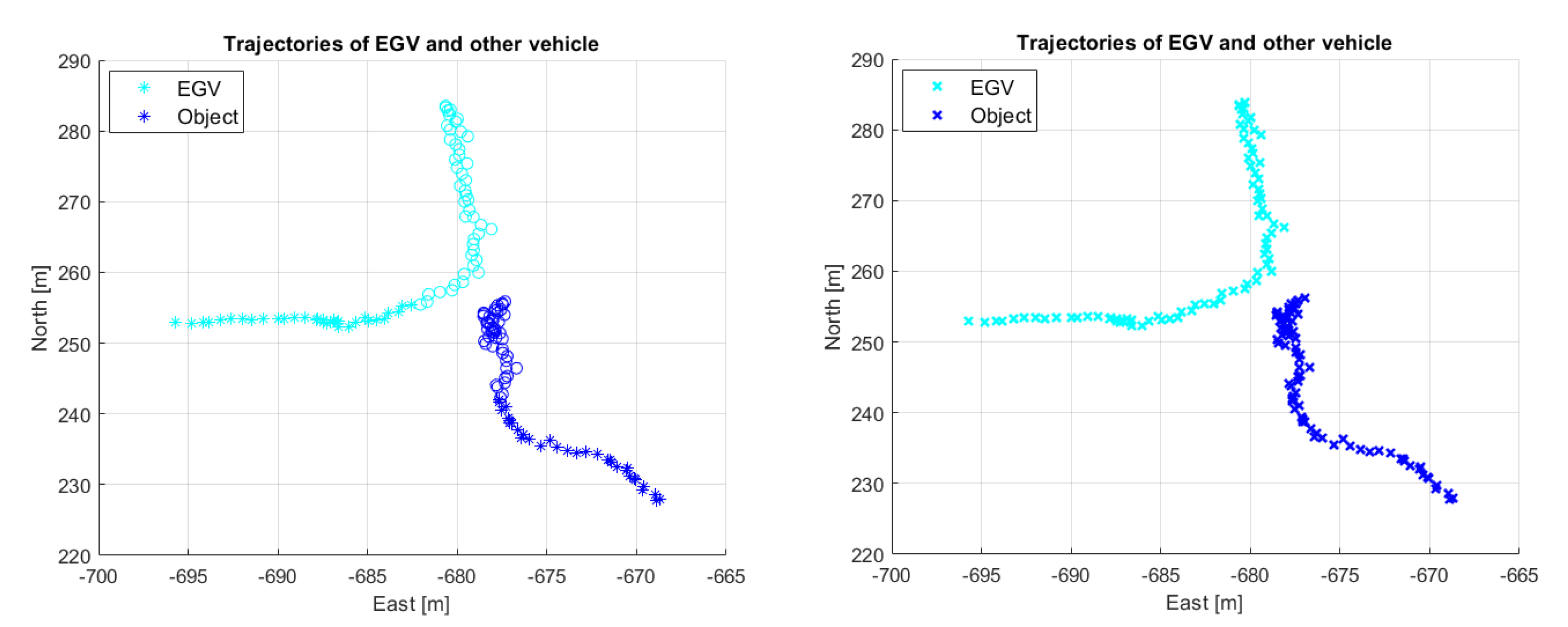
Figure 36.
Decisions for 1st encounter (left: the improved method, * means no decision, circle means object behind EGV; right: the basic method).
Figure 36.
Decisions for 1st encounter (left: the improved method, * means no decision, circle means object behind EGV; right: the basic method).
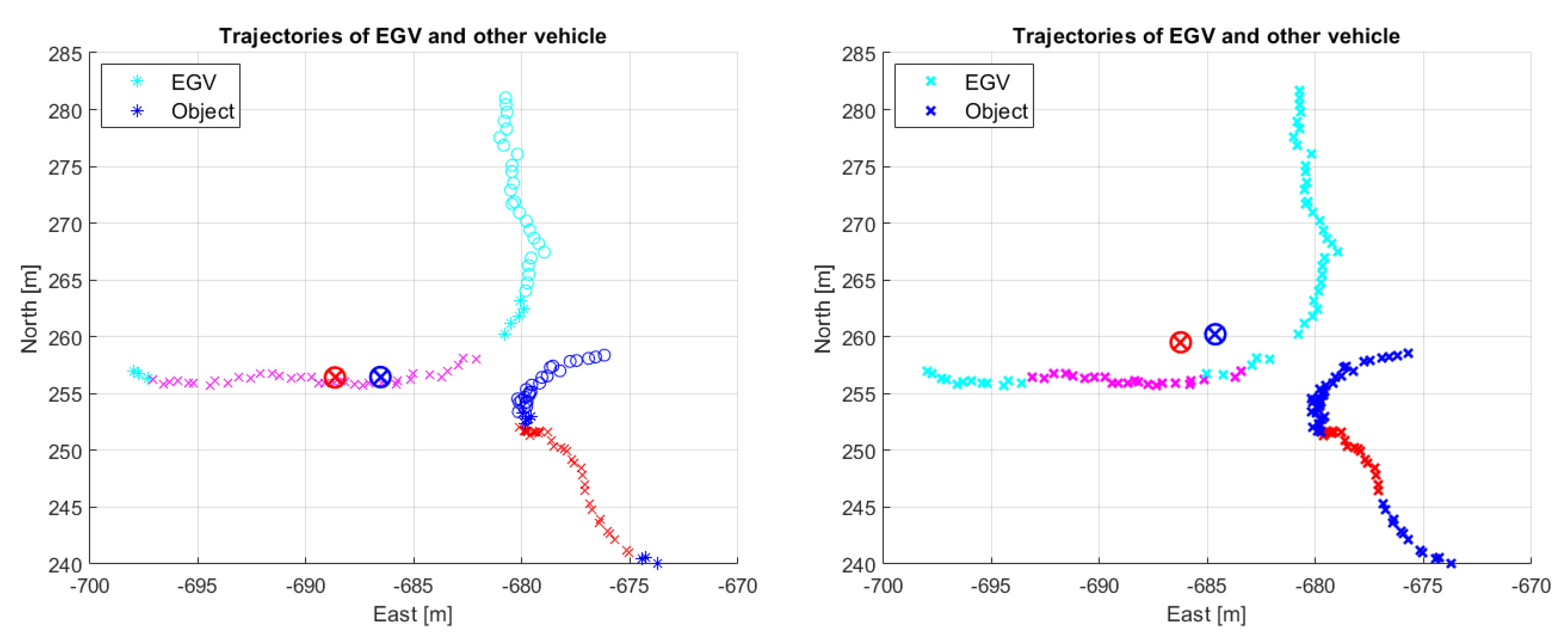
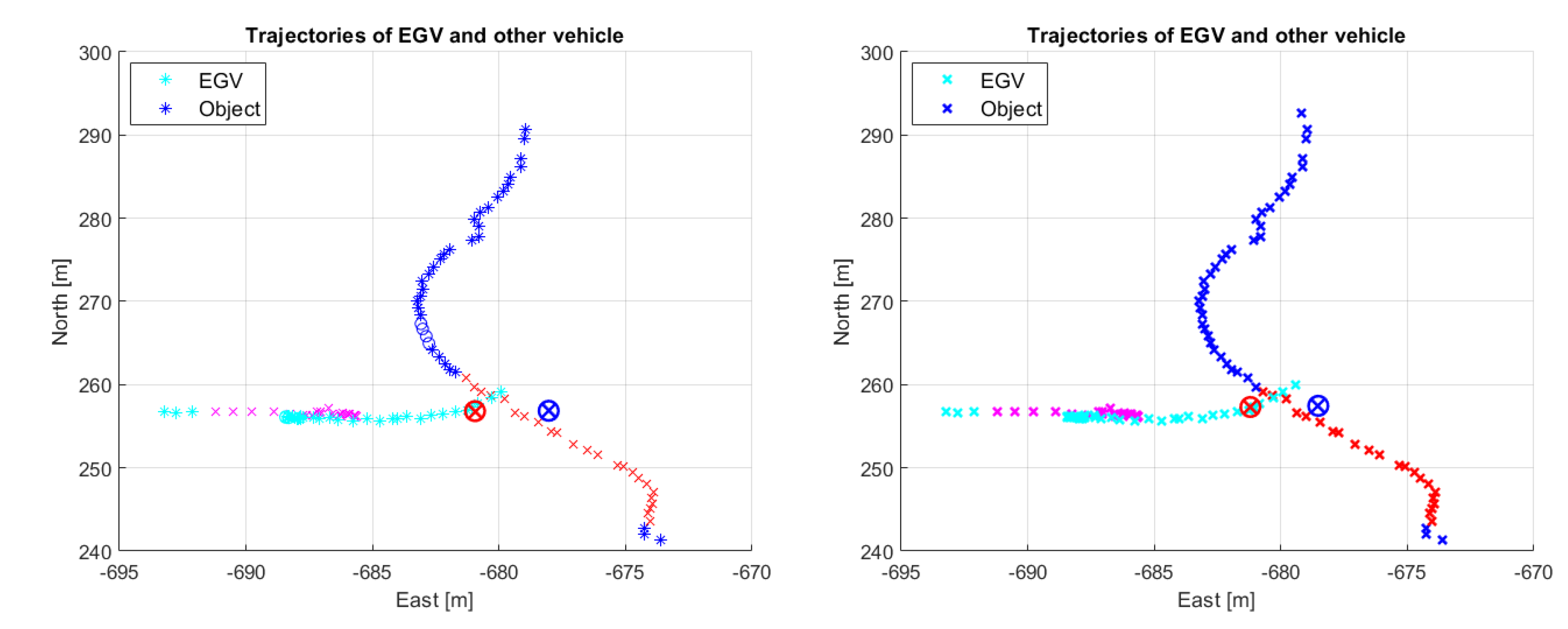
Figure 37.
Decisions for 2nd encounter (left: the improved method, * means no decision, circle means object behind EGV, red and magenta × means danger of collision; right: the basic method, red and magenta means danger of collision while the red circle with cross is the emergency and the blue circle with cross is the firm braking predicted stopped position of the EGV, respectively).
Figure 37.
Decisions for 2nd encounter (left: the improved method, * means no decision, circle means object behind EGV, red and magenta × means danger of collision; right: the basic method, red and magenta means danger of collision while the red circle with cross is the emergency and the blue circle with cross is the firm braking predicted stopped position of the EGV, respectively).
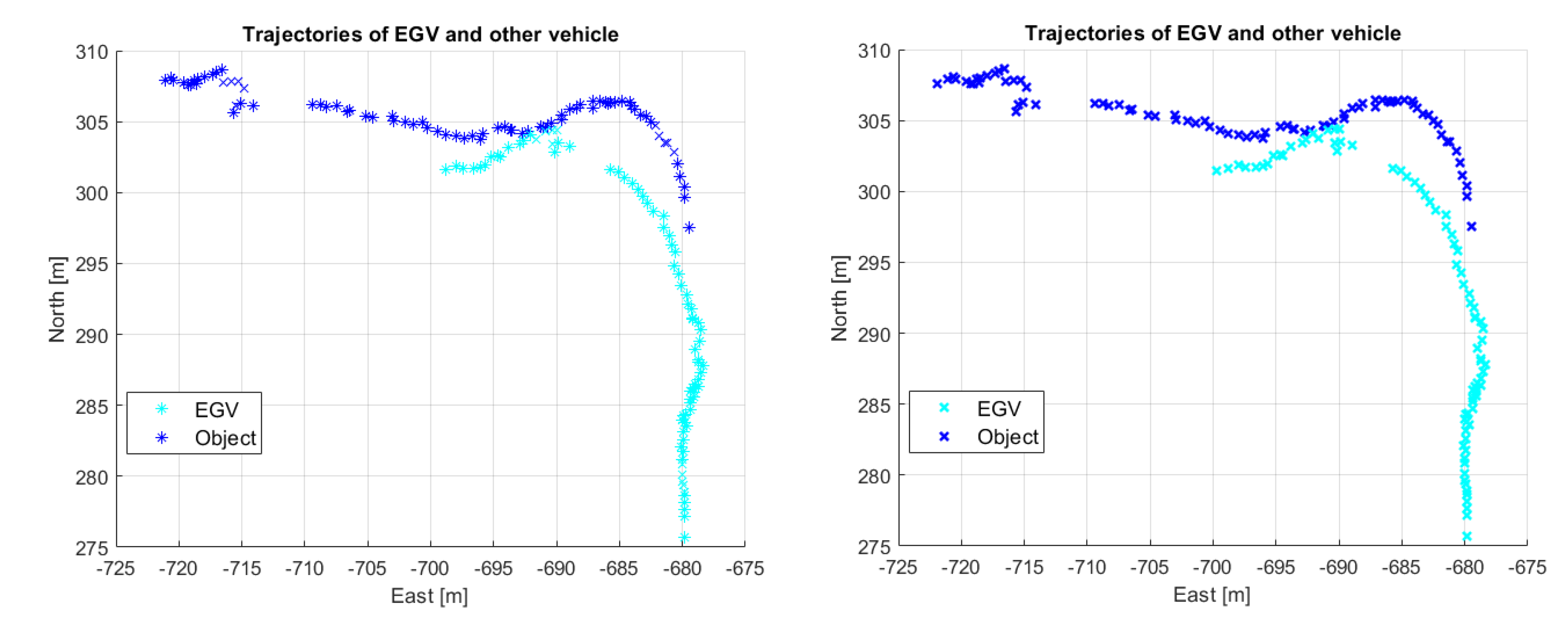
Figure 38.
Decisions for 3rd encounter (left: the improved method, * means no decision, circle means object behind EGV, red and magenta × means danger of collision; right: the basic method, red and magenta means danger of collision while the red circle with cross is the emergency and the blue circle with cross is the firm braking predicted stopped position of the EGV, respectively).
Figure 38.
Decisions for 3rd encounter (left: the improved method, * means no decision, circle means object behind EGV, red and magenta × means danger of collision; right: the basic method, red and magenta means danger of collision while the red circle with cross is the emergency and the blue circle with cross is the firm braking predicted stopped position of the EGV, respectively).
Figure 39.
Decisions for EGV following the other vehicle (left: the improved method, × means special case having other vehicle in front of EGV moving away; right: the basic method).
Figure 39.
Decisions for EGV following the other vehicle (left: the improved method, × means special case having other vehicle in front of EGV moving away; right: the basic method).
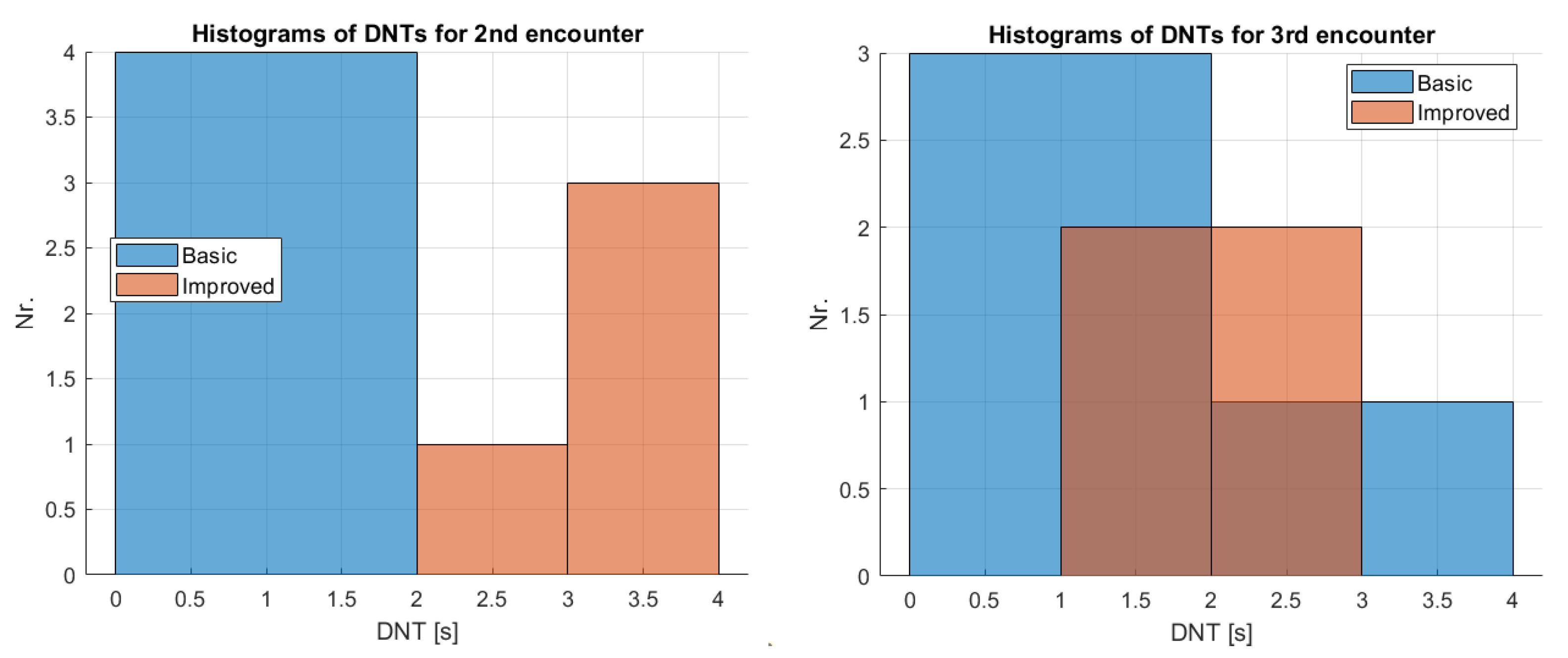
Figure 40.
Histogram of DNT values for 2nd (left) and 3rd (right) encounters with basic and improved methods).
Figure 40.
Histogram of DNT values for 2nd (left) and 3rd (right) encounters with basic and improved methods).
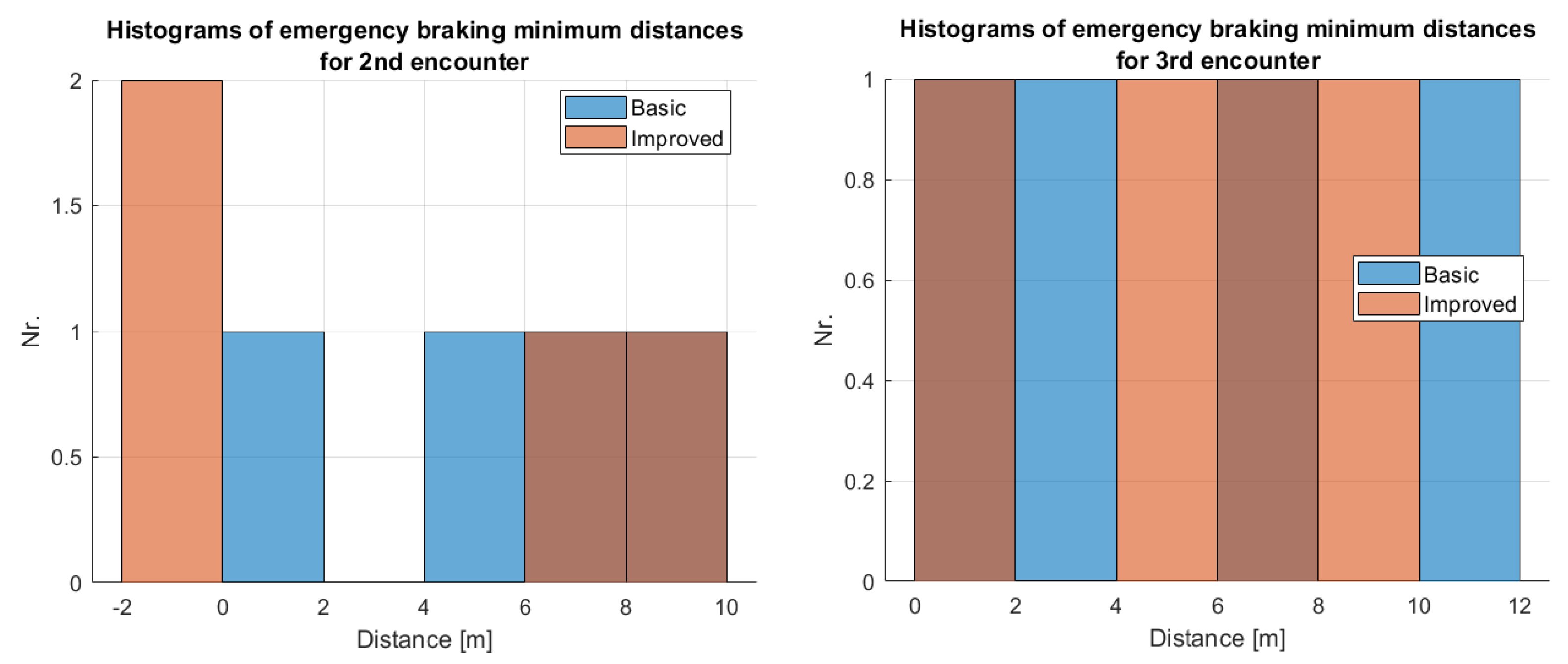
Figure 41.
Histogram of minimum distances for 2nd (left) and 3rd (right) encounters with basic and improved methods).
Figure 41.
Histogram of minimum distances for 2nd (left) and 3rd (right) encounters with basic and improved methods).
Table 1.
Training results for Yolov5s neural network trained on the CARLA dataset.
Table 1.
Training results for Yolov5s neural network trained on the CARLA dataset.
| Classes | Precision | Recall | F1 | mAP@.5 | mAP.5:0.95 |
|---|
| All | 0.938 | 0.826 | 0.878 | 0.878 | 0.581 |
| Cars | 0.941 | 0.979 | 0.959 | 0.977 | 0.827 |
| Bicycles | 0.938 | 0.861 | 0.897 | 0.918 | 0.54 |
| Pedestrians | 0.934 | 0.637 | 0.757 | 0.739 | 0.377 |
Table 2.
Training results for the Yolo_RL network.
Table 2.
Training results for the Yolo_RL network.
| Classes | Precision | Recall | F1 | mAP@.5 | mAP.5:0.95 |
|---|
| Cars | 0.941 | 0.94 | 0.94 | 0.95 | 0.775 |
Table 3.
Position measurement error variances.
Table 3.
Position measurement error variances.
| Direction | Flight 1 | Flight 2 | Flight 3 | Flight 4 | Average |
|---|
| North | 0.058 | 0.26 | 0.315 | 0.0662 | 0.1748 |
| East | 1.43 | 0.93 | 0.333 | 0.2 | 0.7233 |
Table 4.
Maximum braking times of a car [s].
Table 4.
Maximum braking times of a car [s].
| Braking Type | 20 km/h | 30 km/h | 40 km/h | 50 km/h |
|---|
| Firm | 1.64 | 1.88 | 2.6 | 2.8 |
| Emergency | 0.98 | 1.28 | 1.58 | 1.8 |
Table 5.
Tuning parameters for basic decision method.
Table 5.
Tuning parameters for basic decision method.
| Parameter | MIN | Step | MAX |
|---|
| W [-] | 3 | 1 | 9 |
| [s] | 1 | 0.5 | 2.5 |
| [m] | 2 | 2 | 6 |
| [-] | 2 | 2 | 8 |
Table 6.
Combination of braking styles in decision and evaluation.
Table 6.
Combination of braking styles in decision and evaluation.
| Notation | Decision Braking Style | Evaluation Braking Style |
|---|
| FF | Firm | Firm |
| EE | Emergency | Emergency |
| FE | Firm | Emergency |
Table 7.
Tuning parameters for improved decision method.
Table 7.
Tuning parameters for improved decision method.
| Parameter | MIN | Step | MAX |
|---|
| [-] | 1 | 1 | 3 |
| [-] | 1 | 1 | 3 |
| [s] | −0.2 | 0.1 | 0.2 |
| [-] | 0 | 0.1 | 0.5 |
| FF | - | - | - |
| EE | - | - | - |
| FE | - | - | - |
Table 8.
Resulting valid basic method parameters from flight 1.
Table 8.
Resulting valid basic method parameters from flight 1.
| W [-] | [s] | [m] | [-] |
|---|
| 4 | 1.5 | 6 | 8 |
| 4 | 2 | 2 | 6 |
| 4 | 2 | 2 | 8 |
Table 9.
Resulting valid improved method parameters from flights 1 and 2 with firm decision and emergency evaluation.
Table 9.
Resulting valid improved method parameters from flights 1 and 2 with firm decision and emergency evaluation.
| Valid Combination | S1 | S2 | S3 | S4 | S5 | S6 |
|---|
| Flight 2/3rd Enc. | | | | | | |
| 1 | 1 | 2 | 2 | 3 | 3 |
| 2 | 3 | 2 | 3 | 2 | 3 |
| [m] | 4.83 | 5.45 | 4.83 | 5.68 | 5.28 | 5.92 |
| DNT () [s] | 2.3 | 3.5 | 2.3 | 3.7 | 2.7 | 3.8 |
| Flight 1/3rd Enc. | | | | | | |
| Case | S1 | S2 | S3 | S4 | S5 | S6 |
| [m] | 1.46 | 1.46 | 1.46 | 1.46 | 1.46 | 1.46 |
| DNT () [s] | 2.2 | 2.6 | 2.4 | 2.6 | 2.4 | 2.7 |
| Flight 1/1st Enc. | | | | | | |
| Case | S1 | – | S3 | – | – | – |
| Flight 2/1st Enc. | | | | | | |
| Case | – | – | – | – | – | – |
Table 10.
THS effect on the performance of the selected parameter combination with on 3rd encounter in flight 2.
Table 10.
THS effect on the performance of the selected parameter combination with on 3rd encounter in flight 2.
| THS | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 |
| [m] | 4.83 | 4.83 | 4.83 | 3.64 | 0 | 0 |
| DNT () [s] | 2.3 | 2.3 | 2.3 | 1.5 | 0 | 0 |
Table 11.
Braking time shift effect on the performance of the selected parameter combination with on 3rd encounter in flight 2.
Table 11.
Braking time shift effect on the performance of the selected parameter combination with on 3rd encounter in flight 2.
| [s] | −0.2 | −0.1 | 0 | 0.1 | 0.2 |
| [m] | 3.64 | 4.83 | 4.83 | 5.28 | 5.18 |
| DNT () [s] | 1.5 | 2.3 | 2.3 | 2.7 | 2.9 |
Table 12.
Decisions about the encounters with the basic method both with firm and emergency braking evaluation (S = safe, D = danger).
Table 12.
Decisions about the encounters with the basic method both with firm and emergency braking evaluation (S = safe, D = danger).
| Flight/Encounter | Expected | Decision | Real MIN. Distance [m] | Firm MIN. Distance [m] | Emergency MIN. Distance [m] | DNT () [s] |
|---|
| Flight 1/1st enc. | S | S | 13.3 | - | - | - |
| Flight 1/2nd enc. | S | D | 6.45 | 2.47 | 3.5 | 0.4 |
| Flight 1/3rd enc. | D | D | 6.93 | −1.15 | 1.67 | 0 |
| Flight 2/1st enc. | S | S | 11.17 | - | - | - |
| Flight 2/2nd enc. | S | D | 10.1 | 8.6 | 8 | 0.2 |
| Flight 2 / 3rd enc. | D | D | 9.15 | 8.24 | 8.81 | 0.2 |
| Flight 3/1st enc. | S | S | 21.38 | - | - | - |
| Flight 3/2nd enc. | S | D | 8.94 | 5.48 | 5.82 | 0.2 |
| Flight 3/3rd enc. | D | D | 11 | 6 | 7 | 0.2 |
| Flight 4/1st enc. | S | S | 16.3 | - | - | - |
| Flight 4/2nd enc. | S | D | 7.9 | 5.6 | 6.65 | 0.4 |
| Flight 4/3rd enc. | D | S | 12 | - | - | - |
Table 13.
Decisions about the encounters with improved method considering firm braking prediction and firm braking evaluation (FF case, S = safe, D = danger).
Table 13.
Decisions about the encounters with improved method considering firm braking prediction and firm braking evaluation (FF case, S = safe, D = danger).
| Flight/Encounter | Expected | Decision | Real MIN. Distance [m] | Evaluation MIN. Distance [m] | DNT () [s] |
|---|
| Flight 1/1st enc. | S | S | 13.3 | - | - |
| Flight 1/2nd enc. | S | D | 6.45 | 6.77 | 3.9 |
| Flight 1/3rd enc. | D | D | 6.93 | −1.08 | 2.4 |
| Flight 2/1st enc. | S | D | 11.17 | 3.9 | 1.0 |
| Flight 2/2nd enc. | S | D | 10.1 | -3.2 | 3 |
| Flight 2/3rd enc. | D | D | 9.15 | 3 | 2.3 |
| Flight 3/1st enc. | S | S | 21.38 | - | - |
| Flight 3/2nd enc. | S | D | 8.94 | −2.7 | 2.8 |
| Flight 3/3rd enc. | D | D | 11 | 8 | 1.8 |
| Flight 4/1st enc. | S | S | 16.3 | - | - |
| Flight 4/2nd enc. | S | D | 7.9 | 6.42 | 3 |
| Flight 4/3rd enc. | D | D | 12 | 6 | 1.0 |
Table 14.
Decisions about the encounters with improved method considering emergency braking prediction and emergency braking evaluation (EE case, S = safe, D = danger).
Table 14.
Decisions about the encounters with improved method considering emergency braking prediction and emergency braking evaluation (EE case, S = safe, D = danger).
| Flight/Encounter | Expected | Decision | Real MIN. Distance [m] | Evaluation MIN. Distance [m] | DNT () [s] |
|---|
| Flight 1/1st enc. | S | S | 13.3 | - | - |
| Flight 1/2nd enc. | S | D | 6.45 | 1.88 | 2.3 |
| Flight 1/3rd enc. | D | D | 6.93 | 1.46 | 2.4 |
| Flight 2/1st enc. | S | S | 11.17 | - | - |
| Flight 2/2nd enc. | S | S | 10.1 | - | - |
| Flight 2/3rd enc. | D | S | 9.15 | - | - |
| Flight 3/1st enc. | S | S | 21.38 | - | - |
| Flight 3/2nd enc. | S | S | 8.94 | - | - |
| Flight 3/3rd enc. | D | D | 11 | 7 | 0.9 |
| Flight 4/1st enc. | S | S | 16.3 | - | - |
| Flight 4/2nd enc. | S | D | 7.9 | 5.62 | 1.8 |
| Flight 4/3rd enc. | D | S | 12 | - | - |
Table 15.
Decisions about the encounters with improved method considering firm braking prediction and emergency braking evaluation (FE case, S = safe, D = danger) representing the tuning case.
Table 15.
Decisions about the encounters with improved method considering firm braking prediction and emergency braking evaluation (FE case, S = safe, D = danger) representing the tuning case.
| Flight/Encounter | Expected | Decision | Real MIN. Distance [m] | Evaluation MIN. Distance [m] | DNT () [s] |
|---|
| Flight 1/1st enc. | S | S | 13.3 | - | - |
| Flight 1/2nd enc. | S | D | 6.45 | 8.81 | 3.9 |
| Flight 1/3rd enc. | D | D | 6.93 | 1.46 | 2.4 |
| Flight 2/1st enc. | S | D | 11.17 | 6.49 | 1.0 |
| Flight 2/2nd enc. | S | D | 10.1 | −1.11 | 3.0 |
| Flight 2/3rd enc. | D | D | 9.15 | 4.83 | 2.3 |
| Flight 3/1st enc. | S | S | 21.38 | - | - |
| Flight 3/2nd enc. | S | D | 8.94 | −1 | 2.8 |
| Flight 3/3rd enc. | D | D | 11 | 8.28 | 1.8 |
| Flight 4/1st enc. | S | S | 16.3 | - | - |
| Flight 4/2nd enc. | S | D | 7.9 | 7.55 | 3.0 |
| Flight 4/3rd enc. | D | D | 12 | 7.37 | 1.0 |
Table 16.
Decisions about the encounters with the basic method considering the revised parameters both with firm and emergency braking evaluation (S = safe, D = danger).
Table 16.
Decisions about the encounters with the basic method considering the revised parameters both with firm and emergency braking evaluation (S = safe, D = danger).
| Flight/Encounter | Expected | Decision | Real MIN. Distance [m] | Firm MIN. Distance [m] | Emergency MIN. Distance [m] | DNT (maxT) [s] |
|---|
| Flight 1/1st enc. | S | S | 13.3 | - | - | - |
| Flight 1/2nd enc. | S | D | 6.45 | 6.63 | 7.66 | 1.9 |
| Flight 1/3rd enc. | D | D | 6.93 | −1.15 | 1.67 | 2.1 |
| Flight 2/1st enc. | S | D | 11.17 | 8.43 | 8.82 | 0.2 |
| Flight 2/2nd enc. | S | D | 10.1 | 1.04 | 1.63 | 0.3 |
| Flight 2/3rd enc. | D | D | 9.15 | 11.75 | 11.81 | 1.3 |
| Flight 3/1st enc. | S | S | 21.38 | - | - | - |
| Flight 3/2nd enc. | S | D | 8.94 | 5.43 | 5.76 | 1 |
| Flight 3/3rd enc. | D | D | 11 | 1.75 | 3.29 | 1 |
| Flight 4/1st enc. | S | S | 16.3 | - | - | - |
| Flight 4/2nd enc. | S | D | 7.9 | 8.65 | 9.26 | 1.6 |
| Flight 4/3rd enc. | D | D | 12 | 6.07 | 7.2 | 0.3 |



 ,
, 











































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}