
Recognition of Area without Understory Vegetation Based on the RGB-UAV Ultra-High Resolution Images in Red Soil Erosion Area


Abstract
1. Introduction
2. Study Area and Data Source
2.1. Study Area
2.2. UAV Data
2.3. Ground Truth Data
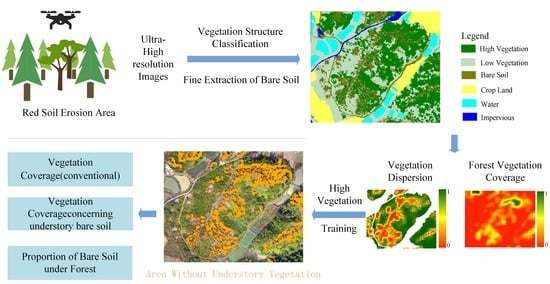
3. Methods
3.1. Object-Oriented Classification of Vegetation Structure
3.2. Fine Extraction of Bare Soil
3.3. Extraction of Area without Understory Vegetation
3.3.1. Calculation of Extraction Features
Forest Vegetation Coverage
Vegetation Dispersion
3.3.2. Sample Selection
3.3.3. Extraction of Area without Understory Vegetation Classification
3.3.4. Post-Classification Processing
3.3.5. Accuracy Assessment Method
3.4. Calculation of Vegetation Coverage
4. Results
4.1. Classification Result
4.2. Results of FVC and Vegetation Dispersion
4.3. Extraction Results
4.3.1. Extraction of Area without Understory Vegetation
4.3.2. Accuracy of Extraction Result
4.3.3. Coverage Vegetation Result
5. Discussion
5.1. Extraction of Area without Understory Vegetation
5.2. Factors Impact Extraction Results
5.2.1. Window Size of FVC and Vegetation Dispersion
5.2.2. The Importance of Vegetation Dispersion
5.2.3. Other Factors
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chastain, J.R.; Currie, W.S.; Townsend, P.A. Carbon sequestration and nutrient cycling implications of the evergreen understory layer in Appalachian forests. For. Ecol. Manag. 2006, 231, 63–77. [Google Scholar] [CrossRef]
- Zhu, X.; He, Z.B.; Du, J. Function and Composition of Understory Vegetation: Recent Advances and Trends. World For. Res. 2014, 27, 7. [Google Scholar] [CrossRef]
- Li, G.; Wan, L.; Cui, M.; Wu, B.; Zhou, J. Influence of Canopy Interception and Rainfall Kinetic Energy on Soil Erosion under Forests. Forests 2019, 10, 509. [Google Scholar] [CrossRef]
- Zhang, H.; Yu, D.; Dong, L. Regional soil erosion assessment from remote sensing data in rehabilitated high density canopy forests of southern China. Catena 2014, 123, 106–112. [Google Scholar] [CrossRef]
- Gabriels, D. Slope Stabilization and Erosion Control. A Bioengineering Approach. Catena 1996, 28, 153–154. [Google Scholar] [CrossRef]
- Yuan, Z.J.; MA, D.F.; Nie, X.D.; Liao, Y.S.; Huang, B.; Zhuo, M.N. Progress in Research on Prevention and Control of Soil Erosion Under Forest in Red Soil Hilly Region of South China. Acta Pedol. Sin. 2020, 57, 12–21. [Google Scholar]
- Zhong, M.W.; Lees, B.G.; Feng, J.; Wan, N.L.; Hai, J.S. Stratified vegetation cover index: A new way to assess vegetation impact on soil erosion. Catena 2010, 83, 87–93. [Google Scholar] [CrossRef]
- Sorriso-Valvo, M.; Bryan, R.B.; Yair, A.; Iovino, F.; Antronico, L. Impact of afforestation on hydrological response and sediment production in a small Calabrian catchment. Catena 1995, 25, 89–104. [Google Scholar] [CrossRef]
- Borrelli, P.; Robinson, D.A.; Fleischer, L.R.; Lugato, E.; Ballabio, C.; Alewell, C.; Meusburger, K.; Modugno, S.; Schütt, B.; Ferro, V.; et al. An assessment of the global impact of 21st century land use change on soil erosion. Nat. Commun. 2017, 8, 2013. [Google Scholar] [CrossRef]
- Wulder, M.A.; Hall, R.J.; Coops, N.C.; Franklin, S.E. High Spatial Resolution Remotely Sensed Data for Ecosystem Characterization. BioScience 2004, 54, 511–521. [Google Scholar] [CrossRef]
- Tuanmu, M.N.; Viña, A.; Bearer, S.; Xu, W.; Ouyang, Z.; Zhang, H.; Liu, J. Mapping understory vegetation using phenological characteristics derived from remotely sensed data. Remote Sens. Environ. 2010, 114, 1833–1844. [Google Scholar] [CrossRef]
- Xu, H.; Hu, X.; Guan, H.; Zhang, B.; Wang, M.; Chen, S.; Chen, M. A remote sensing based method to detect soil erosion in forests. Remote Sens. 2019, 11, 513. [Google Scholar] [CrossRef]
- Zhou, H.; Fu, L.; Sharma, R.P.; Lei, Y.; Guo, J. A hybrid approach of combining random forest with texture analysis and VDVI for desert vegetation mapping Based on UAV RGB Data. Remote Sens. 2021, 13, 1891. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, X.; Zhou, X. An identification method of understory vegetation cover using UAV remote sensing in visible light band. J. Fuzhou Univ. Nat. Sci. Ed. 2018, 46, 814–820. [Google Scholar]
- Linderman, M.; Liu, J.; Qi, J.; An, L.; Ouyang, Z.; Yang, J.; Tan, Y. Using artificial neural networks to map the spatial distribution of understorey bamboo from remote sensing data. Int. J. Remote Sens. 2004, 25, 1685–1700. [Google Scholar] [CrossRef]
- Wang, T.J.; Skidmore, A.K.; Toxopeus, A.G. Improved understorey bamboo cover mapping using a novel hybrid neural network and expert system. Int. J. Remote Sens. 2009, 30, 965–981. [Google Scholar] [CrossRef]
- Vierling, K.T.; Vierling, L.A.; Gould, W.A.; Martinuzzi, S.; Clawges, R.M. Lidar: Shedding new light on habitat characterization and modeling. Front. Ecol. Environ. 2008, 6, 90–98. [Google Scholar] [CrossRef]
- Martinuzzi, S.; Vierling, L.A.; Gould, W.A.; Falkowski, M.J.; Evans, J.S.; Hudak, A.T.; Vierling, K.T. Mapping snags and understory shrubs for a LiDAR-based assessment of wildlife habitat suitability. Remote Sens. Environ. 2009, 113, 2533–2546. [Google Scholar] [CrossRef]
- Hill, R.A.; Broughton, R.K. Mapping the understorey of deciduous woodland from leaf-on and leaf-off airborne LiDAR data: A case study in lowland Britain. ISPRS J. Photogramm. Remote Sens. 2009, 64, 223–233. [Google Scholar] [CrossRef]
- Chai, P.; Dong, J.; Liu, J.; Ding, Y. Study on the extraction method of soil erosion area under forest in southern red soil area based on UAV remote sensing image. Subtrop. Soil Water Conserv. 2022, 34, 1–5, 33. [Google Scholar]
- Blanco-Canqui, H.; Lal, R. Soil Erosion under Forests; Springer: Dordrecht, The Netherlands, 2010. [Google Scholar]
- Dai, Q.; Peng, X.; Wang, P.J. Surface erosion and underground leakage of yellow soil on slopes in karst regions of southwest China. Land Degrad. Dev. 2018, 29, 2438–2448. [Google Scholar] [CrossRef]
- Panagos, P.; Borrelli, P.; Meusburger, K.; Alewell, C.; Lugato, E.; Montanarella, L. Estimating the soil erosion cov-er-management factor at the European scale. Land Use Policy 2015, 48, 38–50. [Google Scholar] [CrossRef]
- Yang, X.H. Deriving RUSLE cover factor from time-series fractional vegetation cover for hillslope erosion modelling in New South Wales. Soil Res. 2014, 52, 253–261. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, X.; Jiang, H. Object-oriented method for urban vegetation mapping using IKONOS imagery. Int. J. Remote Sens. 2010, 31, 177–196. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef]
- Bian, X.; Ma, Q.; Liu, C. Vegetation coverage calculation based on low altitude visible spectrum. Bull. Soil Water Conserv. 2017, 37, 270–275. [Google Scholar]
- Woebbecke, D.M.; Meyer, G.E.; Von, B.K.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. Am. Soc. Agric. Eng. 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Meyer, G.E.; Netob, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef]
- Zhou, R.; Yang, C.; Li, E.; Cai, X.; Yang, J.; Xia, Y. Object-Based Wetland Vegetation Classification Using Multi-Feature Selection of Unoccupied Aerial Vehicle RGB Imagery. Remote Sens. 2021, 13, 4910. [Google Scholar] [CrossRef]
- Thakkar, A.K.; Desai, V.R.; Patel, A.; Potdar, M.B. Post-classification corrections in improving the classification of Land Use/Land Cover of arid region using RS and GIS: The case of Arjuni watershed, Gujarat, India. Egypt. J. Remote Sens. Space Sci. 2017, 20, 79–89. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Jia, K.; Yao, Y.; Wei, X. A review on fractional vegetation cover estimation using remote sensing. Adv. Earth Sci. 2013, 28, 774–782. [Google Scholar]
- Zhang, L.; Niu, Y.; Zhang, H. Maize canopy temperature extracted from UAV thermal and RGB imagery and its application in water stress monitoring. Front. Plant Sci. 2019, 10, 1270. [Google Scholar] [CrossRef]
- Roşca, S.; Suomalainen, J.; Bartholomeus, H.; Herold, M. Comparing terrestrial laser scanning and unmanned aerial vehicle structure from motion to assess top of canopy structure in tropical forests. Interface Focus 2018, 8, 20170038. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Bare Soil | Low Vegetation | High Vegetation | Crop Land | Impervious | Water | Total | User’s Accuracy (%) | ||
| Prediction | Bare soil | 143 | 0 | 0 | 0 | 0 | 0 | 143 | 100 |
| Low vegetation | 0 | 245 | 35 | 18 | 0 | 0 | 298 | 82.2 | |
| High vegetation | 0 | 33 | 259 | 6 | 0 | 0 | 298 | 86.9 | |
| Cropland | 5 | 17 | 9 | 233 | 0 | 0 | 264 | 88.3 | |
| Impervious | 0 | 0 | 0 | 0 | 111 | 0 | 111 | 100 | |
| Water | 0 | 0 | 0 | 0 | 0 | 97 | 97 | 100 | |
| total | 148 | 295 | 303 | 257 | 111 | 97 | 1211 | ||
| Producer accuracy (%) | 96.6 | 83.1 | 85.5 | 90.7 | 100 | 100 | |||
| OA 89.8% | |||||||||
| Pr (/%) | Re (/%) | F1 (/%) | |
|---|---|---|---|
| Area 1 | 85.99 | 89.47 | 87.69 |
| Area 2 | 88.85 | 91.02 | 89.92 |
| Area 3 | 90.90 | 81.46 | 91.19 |
| Area 1 | Area 2 | Area 3 | |
|---|---|---|---|
| Vegetation Coverage (conventional) | 72.28% | 97.15% | 89.95% |
| Vegetation Coverage (concerning understory bare soil) | 51.88% | 77.17% | 48.29% |
| Proportion of Bare Soil under Forest | 20.40% | 19.98% | 41.69% |
| Pr (/%) | Re (/%) | F1 (/%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Single Feature | Double Feature | Increase Value | Single Feature | Double Feature | Increase Value | Single Feature | Double Feature | Increase Value | |
| Area 1 | 83.38 | 85.99 | 2.61 | 74.58 | 89.47 | 14.89 | 78.74 | 87.69 | 8.95 |
| Area 2 | 86.18 | 88.85 | 2.7 | 73.59 | 91.02 | 17.43 | 79.39 | 89.92 | 10.53 |
| Area 3 | 90.21 | 90.90 | 0.69 | 82.26 | 91.46 | 9.2 | 86.50 | 91.19 | 4.69 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, C.; Liu, J.; Ding, Y.; Chai, P.; Bian, X. Recognition of Area without Understory Vegetation Based on the RGB-UAV Ultra-High Resolution Images in Red Soil Erosion Area. Remote Sens. 2023, 15, 1470. https://doi.org/10.3390/rs15051470
Han C, Liu J, Ding Y, Chai P, Bian X. Recognition of Area without Understory Vegetation Based on the RGB-UAV Ultra-High Resolution Images in Red Soil Erosion Area. Remote Sensing. 2023; 15(5):1470. https://doi.org/10.3390/rs15051470
Chicago/Turabian StyleHan, Chunming, Jia Liu, Yixing Ding, Peng Chai, and Xiaolin Bian. 2023. "Recognition of Area without Understory Vegetation Based on the RGB-UAV Ultra-High Resolution Images in Red Soil Erosion Area" Remote Sensing 15, no. 5: 1470. https://doi.org/10.3390/rs15051470
APA StyleHan, C., Liu, J., Ding, Y., Chai, P., & Bian, X. (2023). Recognition of Area without Understory Vegetation Based on the RGB-UAV Ultra-High Resolution Images in Red Soil Erosion Area. Remote Sensing, 15(5), 1470. https://doi.org/10.3390/rs15051470