
Rapid Detection and Orbital Parameters’ Determination for Fast-Approaching Non-Cooperative Target to the Space Station Based on Fly-around Nano-Satellite

Abstract
:
1. Introduction
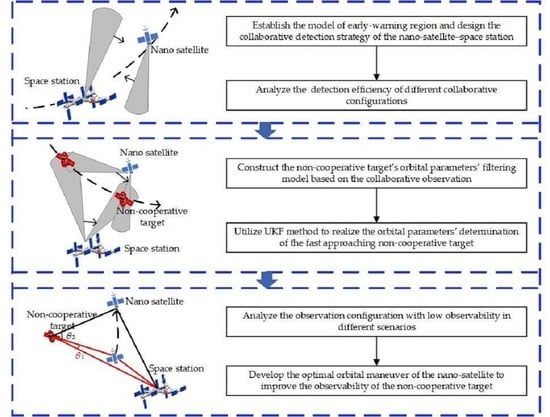
2. Problem Description and Model Establishment
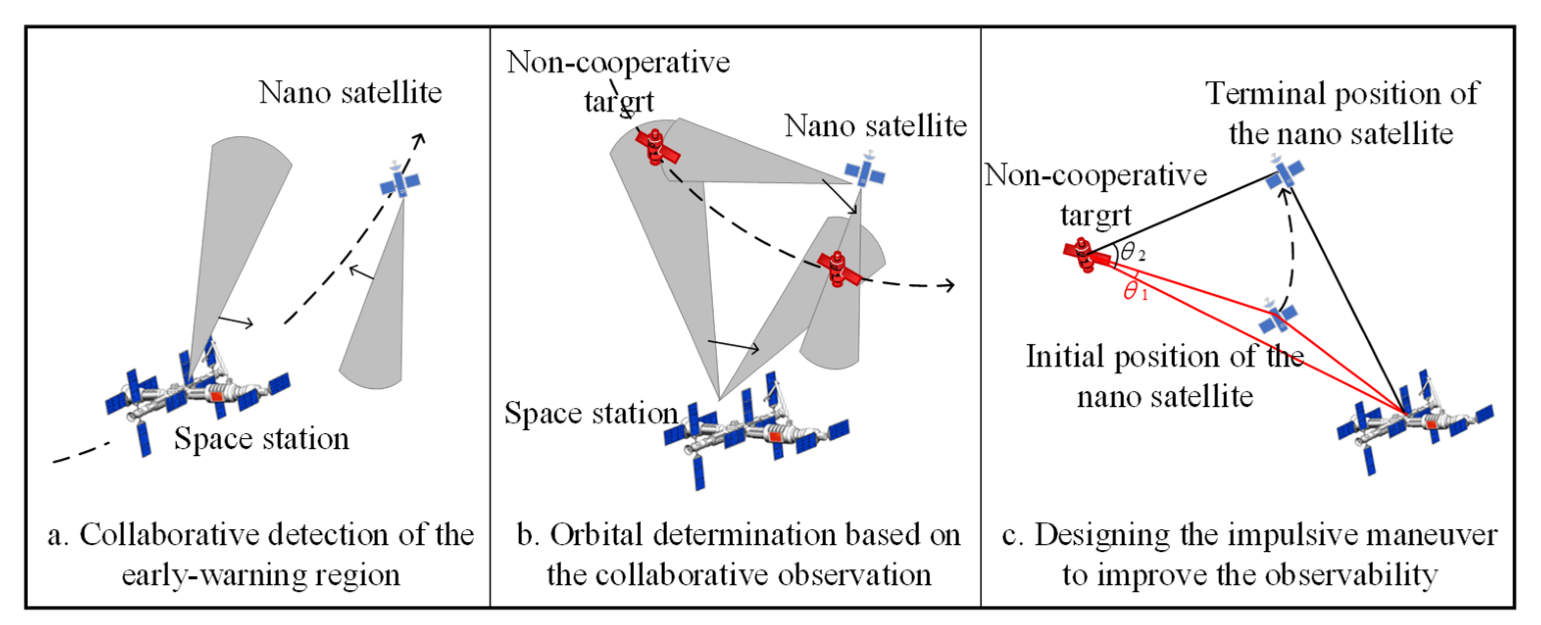
2.1. Collaboration Detection of the Early-Warning Region
2.2. Orbital Parameters’ Filtering Model of Non-Cooperative Target Based on the Dual-View Angle Information
2.3. Orbital Maneuvering Optimization of the Nano-Satellite Considering the Observability of Non-Cooperative Target
2.3.1. Orbital Maneuver Optimization
- Orbital maneuver scheme:
- 2.
- Impulse maneuver model:
2.3.2. Constraint Analysis
- The minimum LOS angle of the collaborative observation;
- 2.
- The time constraint of the orbital maneuver;
2.3.3. Performance Index
3. Collaborative Detection of Nano-Satellite–Space Station
3.1. Collaborative Detection Configuration of Nano-Satellite–Space Station
3.2. Efficiency Analysis of Collaborative Detection
4. UKF Filtering Algorithm
- Sigma Sampling;
- 2.
- Estimation (Propagation);
- 3.
- Update (Correction):
- 4.
- where Rk is the variance matrix of the measurement noise.
5. Simulation and Analysis
5.1. The Orbital Parameters’ Determination Based on Angle Information
5.2. Optimal Orbital Maneuver of the Nano-Satellite Considering the Observability of the Target
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Oltrogge, D.L.; Alfano, S. The technical challenges of better Space Situational Awareness and Space Traffic Management. J. Space Saf. Eng. 2019, 6, 72–79. [Google Scholar] [CrossRef]
- Xu, S.X. Research on Visual Relative Pose Measurement of Non-Cooperative Spacecraft; Nanjing University of Science and Technology: Nanjing, China, 2019. [Google Scholar]
- Du, Y.Q. Research on Key Technologies of Space Situational Awareness Based on Binocular Vision Satellite Formation; Zhejiang University: Hangzhou, China, 2020. [Google Scholar]
- Chen, L.; Zhang, W.; Li, X.P.; Li, F.Q. Safety, Reliability, Maintainability and Life Assessment of NASA International Space Station. Qual. Reliab. 2020, 3, 40–44. [Google Scholar]
- Wang, L.W.; Lin, K.P.; Hong, Y. Development of Micro-nano Electronic Reconnaissance Satellite. Aerosp. Electron. Warf. 2018, 34, 51–55. [Google Scholar]
- Xu, Y.S.; Zheng, J.; Wang, T.; Li, C.; Huang, X.D.; Lv, H.Q. Module Design of Micro-nano Satellite Assembled in Space Station. Spacecr. Eng. 2022, 31, 48–55. [Google Scholar]
- Wang, D.Y.; Hu, Q.Y.; Hu, H.D.; Liu, C.R. Review on Autonomous Relative Navigation of Non-cooperative Spacecraft. Control Theory Appl. 2018, 35, 1392–1404. [Google Scholar]
- Gong, B.C.; Zhang, D.G.; Zhang, W.F.; Yuan, Y.H.; Chen, X.Q. Angles-only relative navigation algorithm for space non-cooperative target in cylindrical frame. J. Chin. Inert. Technol. 2021, 29, 756–762. [Google Scholar]
- Woffinden, D.C. Angles-Only Navigation for Autonomous Orbital Rendezvous. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2008. [Google Scholar]
- Woffinden, D.C.; Geller, D.K. Observability Criteria for Angles-only Navigation. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1194–1208. [Google Scholar] [CrossRef]
- Woffinden, D.C.; Geller, D.K. Optimal orbital rendezvous maneuvering for angles-only navigation. J. Guid. Control Dyn. 2009, 32, 1382–1387. [Google Scholar] [CrossRef]
- Gong, B.C.; Wang, S.; Hao, M.R.; Guan, S.J. Cooperative Relative Navigation Algorithm for Multi-spacecraft Close-range Formation. J. Astronaut. 2021, 42, 344–350. [Google Scholar]
- Yao, P.D.; Li, Q.X.; Wu, P.L. Angle-only Tracking Method for Space Non-cooperative Target by Two-satellite Formation. Navig. Control 2020, 19, 27–34. [Google Scholar]
- Han, F.; Liu, F.C.; Wang, Z.L. Multi—Line-of-Sight Angle—Only Relative Navigation for Space Multi—Robot Cooperation. Acta Aeronaut. ET Astronaut. Sin. 2021, 42, 309–319. [Google Scholar]
- Wang, K.; Xu, S.J.; Li, K.; Tang, L. Error analysis and formation design for double line-of-sight measuring relative navigation method. Acta Aeronaut. ET Astronaut. Sin. 2018, 39, 147–161. [Google Scholar]
- Su, J.M.; Dong, Y.F. Relative Guidance Accuracy Analysis for Non-cooperative Space Target by Range-only Measurement of Satellite Formation. Chin. Space Sci. Technol. 2011, 31, 48–56. [Google Scholar]
- Kaufman, E.; Lovell, T.A.; Lee, T. Nonlinear Observability for Relative Orbit Determination with Angles-Only Measurements. J. Astronaut. Sci. 2016, 63, 60–80. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Liu, Z.; Xie, W.X. Auxiliary Truncated Unscented Kalman Filtering for Bearings-Only Maneuvering Target Tracking. Sensors 2017, 17, 972. [Google Scholar] [CrossRef]
- Pi, J.; Bang, H. Trajectory Design for Improving Observability of Angles-Only Relative Navigation between Two Satellites. J. Astronaut. Sci. 2014, 61, 391–412. [Google Scholar] [CrossRef]
- Geller, D.K.; Klein, I. Angles-only navigation state observability during orbital proximity operations. J. Guid. Control Dyn. 2014, 37, 1976–1983. [Google Scholar] [CrossRef]
- Geller, D.K.; Lovell, T.A. Angles-Only Initial Relative Orbit Determination Performance Analysis using Cylindrical Coordinates. J. Astronaut. Sci. 2017, 64, 72–96. [Google Scholar] [CrossRef]
- Wang, K.; Chen, T.; Xu, S.J. A Method of Double Line-of-sight Measurement Relative Navigation. Acta Aeronaut. ET Astronaut. Sin. 2011, 32, 1084–1091. [Google Scholar]
- Dang, Z.H. Study on Bounds Model and Control for Spacecraft Cluster; National University of Defense Technology: Changsha, China, 2015. [Google Scholar]
- Luo, Y.Z. Research on Spatial Optimal Rendezvous Path Planning Strategy; National University of Defense Technology: Changsha, China, 2007. [Google Scholar]
- Karslioglu, M.O.; Erdogan, E.; Pamuk, O. GPS-Based Real-Time Orbit Determination of Low Earth Orbit Satellites Using Robust Unscented Kalman Filter. J. Aerosp. Eng. 2017, 30, 04017063. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Formation Scheme | x/km | y/km | z/km | vx/(m/s) | vy/(m/s) | vz/(m/s) |
|---|---|---|---|---|---|---|
| Scheme 1 | Formation 1 | 4 | 20 | 0 | 0 | −9.0512 |
| Formation 2 | 4.5 | 22.5 | 0 | 0 | −10.1826 | |
| Formation 3 | 5 | 25 | 0 | 0 | −2.8285 | |
| Scheme 2 | Formation 4 | 0 | 20 | 0 | 0 | 0 |
| Formation 5 | 0 | 22.5 | 0 | 0 | 0 | |
| Formation 6 | 0 | 25 | 0 | 0 | 0 | |
| Formation 1 | 4 | 20 | 0 | 0 | −9.0512 |
| Formation Scheme | Coverage Ratio of Warning Region | Scanning Time |
|---|---|---|
| Only space station | 66.27% | / |
| Formation 1 | 97.36% | 370 s |
| Formation 2 | 97.35% | 355 s |
| Formation 3 | 97.34% | 350 s |
| Formation 4 | 97.28% | 330 s |
| Formation 5 | 97.20% | 325 s |
| Formation 6 | 97.25% | 330 s |
| Relative State | x/km | y/km | z/km | vx/(m/s) | vy/(m/s) | vz/(m/s) |
|---|---|---|---|---|---|---|
| Xn(t0) | 500 | 2000 | 0 | 0 | −1.1314 | 0 |
| Xt(t0) | 500 | 6000 | 0 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Sun, Y.; Yu, X.; Fang, Q. Rapid Detection and Orbital Parameters’ Determination for Fast-Approaching Non-Cooperative Target to the Space Station Based on Fly-around Nano-Satellite. Remote Sens. 2023, 15, 1213. https://doi.org/10.3390/rs15051213
Sun C, Sun Y, Yu X, Fang Q. Rapid Detection and Orbital Parameters’ Determination for Fast-Approaching Non-Cooperative Target to the Space Station Based on Fly-around Nano-Satellite. Remote Sensing. 2023; 15(5):1213. https://doi.org/10.3390/rs15051213
Chicago/Turabian StyleSun, Chong, Yongqing Sun, Xiaozhou Yu, and Qun Fang. 2023. "Rapid Detection and Orbital Parameters’ Determination for Fast-Approaching Non-Cooperative Target to the Space Station Based on Fly-around Nano-Satellite" Remote Sensing 15, no. 5: 1213. https://doi.org/10.3390/rs15051213
APA StyleSun, C., Sun, Y., Yu, X., & Fang, Q. (2023). Rapid Detection and Orbital Parameters’ Determination for Fast-Approaching Non-Cooperative Target to the Space Station Based on Fly-around Nano-Satellite. Remote Sensing, 15(5), 1213. https://doi.org/10.3390/rs15051213