
Reconstruction of Sentinel Images for Suspended Particulate Matter Monitoring in Arid Regions


 ,
,  ,
,  ,
,
Abstract
1. Introduction
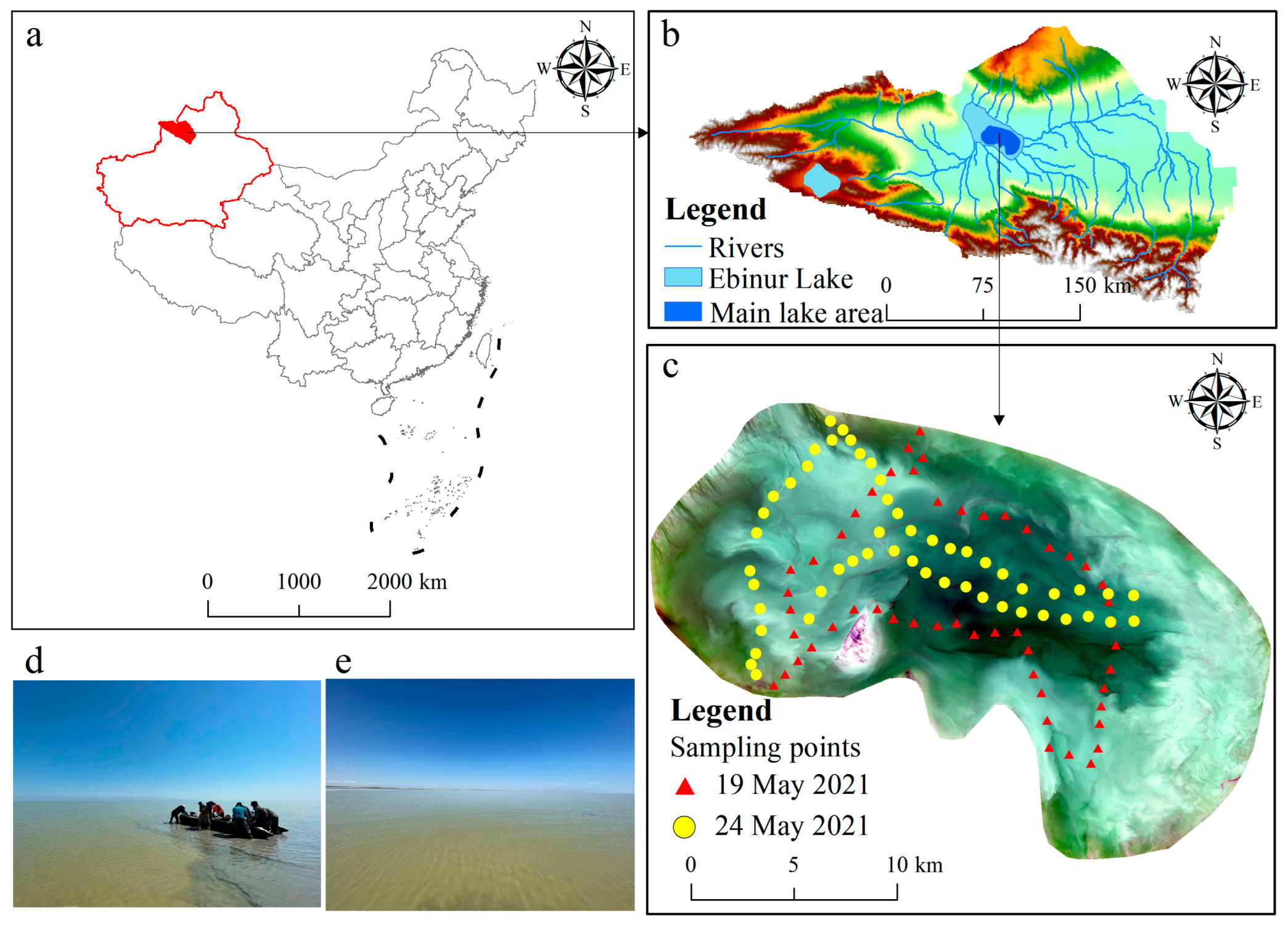
2. Overview of the Research Area
3. Data Source and Processing
3.1. Water Sample Collection and Laboratory Analysis
3.2. Images and Preprocessing
4. Methods
4.1. Spatio-Temporal Fusion Algorithm
4.2. Spatio-Temporal Fusion Strategy
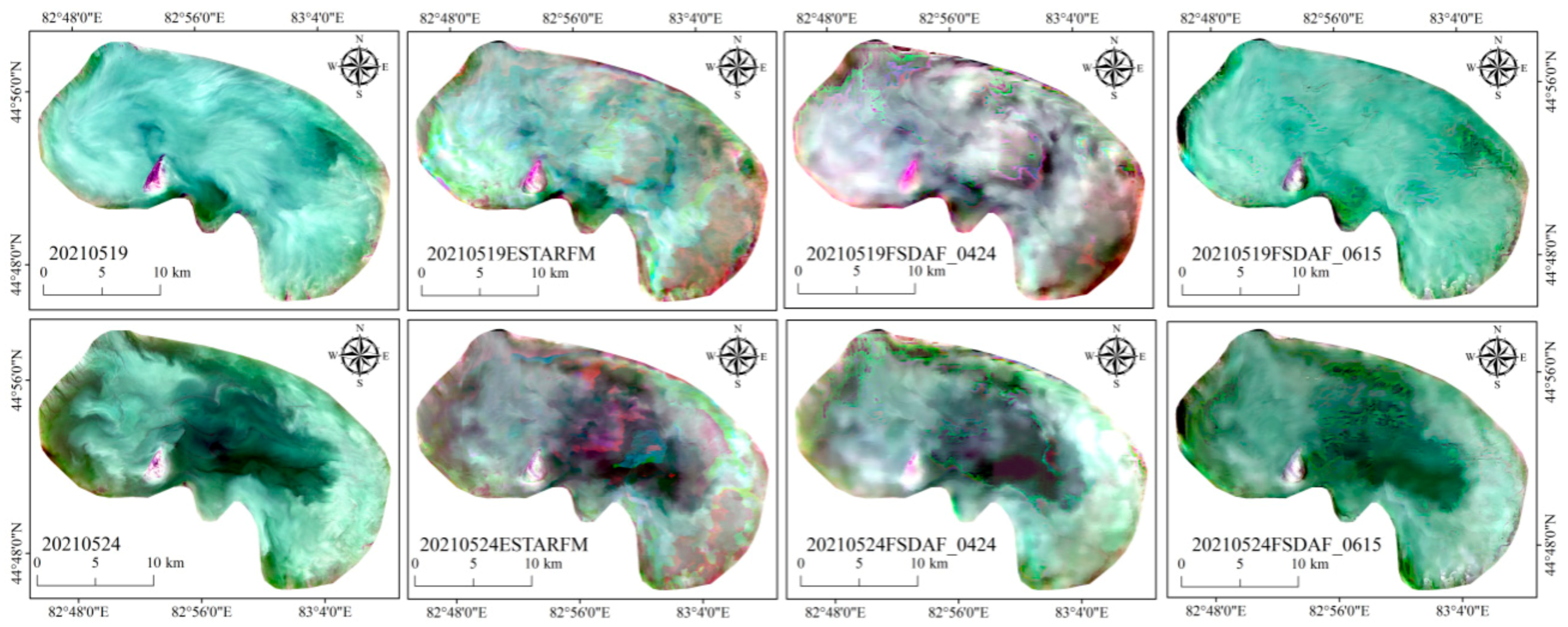
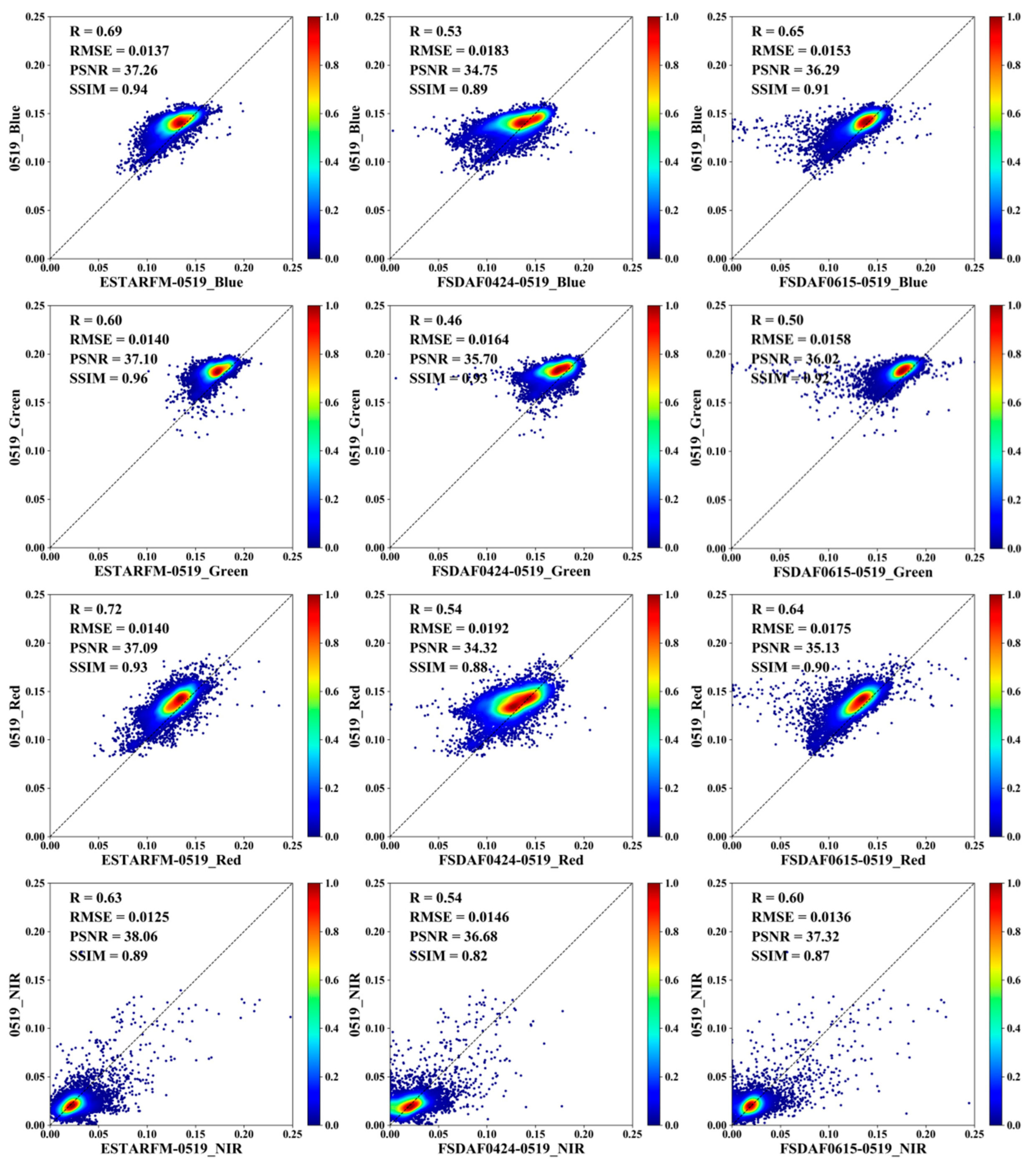
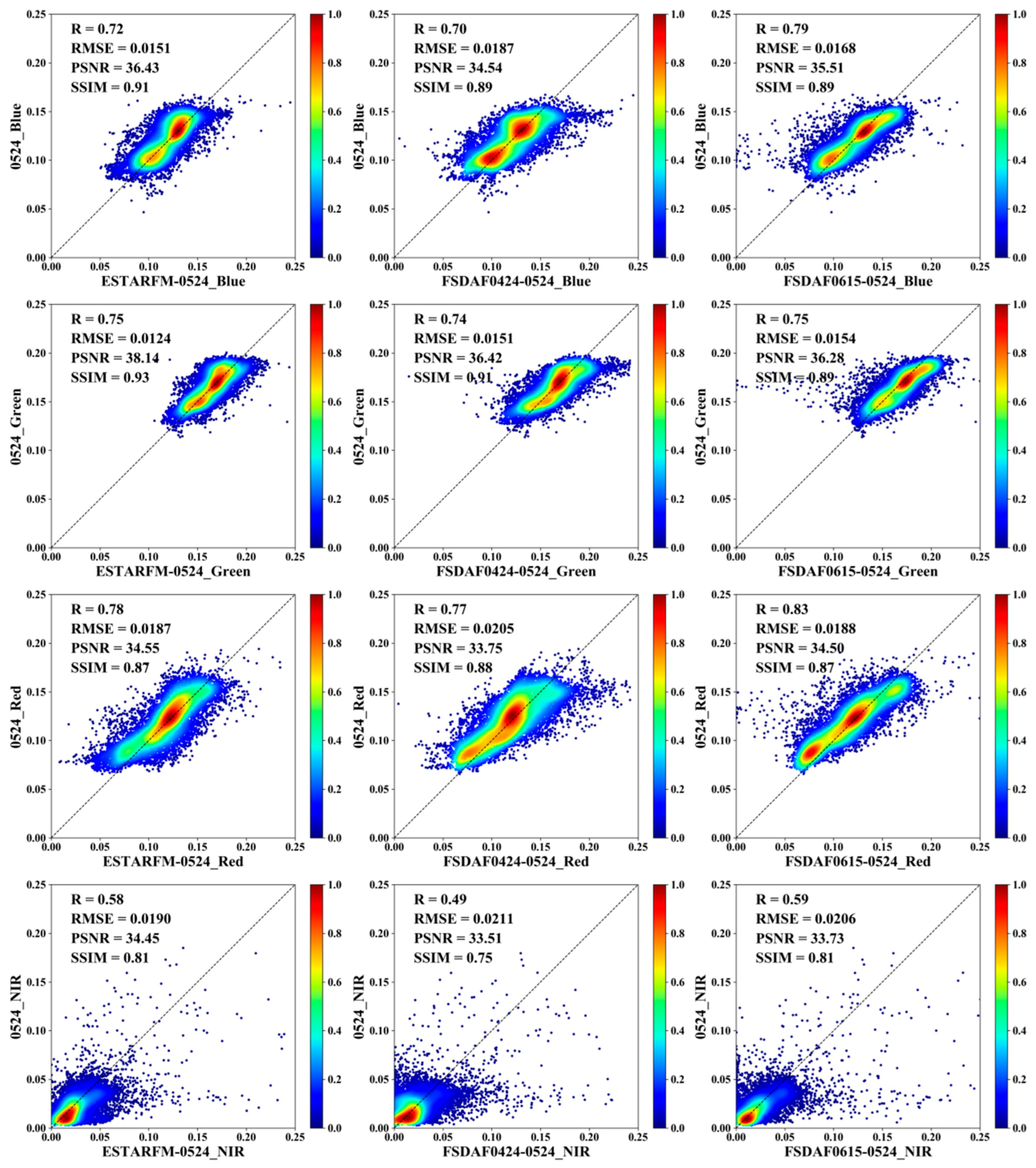
- Fusion Strategies: The images (pixel 10 m) of Ebinur Lake on 19 and 24 May 2021 were used as reconstruction targets, and data pairs from different time points were used as inputs for ESTARFM and FSDAF models to reconstruct the optimal reflectance images. Firstly, Sentinel-2 and -3 images presented on 15 June and 24 April 2021 served as input image pairs for the ESTARFM model. According to the Sentinel-3 image on 19 and 24 May 2021, the ESTARFM fusion remote sensing image with a spatial resolution of 10 m was predicted. Secondly, the Sentinel-2 and -3 image pairs from 15 June and 24 April 2021 were used as input to the FSDAF model. The Sentinel-3 images on 19 and 24 May 2021 were used to predict FSDAF fusion images on the same date. Thirdly, the fused ESTARFM, FSDAF0424, and FSDAF0516 images were analyzed, validated, and compared with the original Sentinel-2 reference images on both sampling days (Figure 4), The small color differences in the fused images are mainly caused by errors in the fused bands. Finally, the SPM concentration inversion was performed on the fused images.
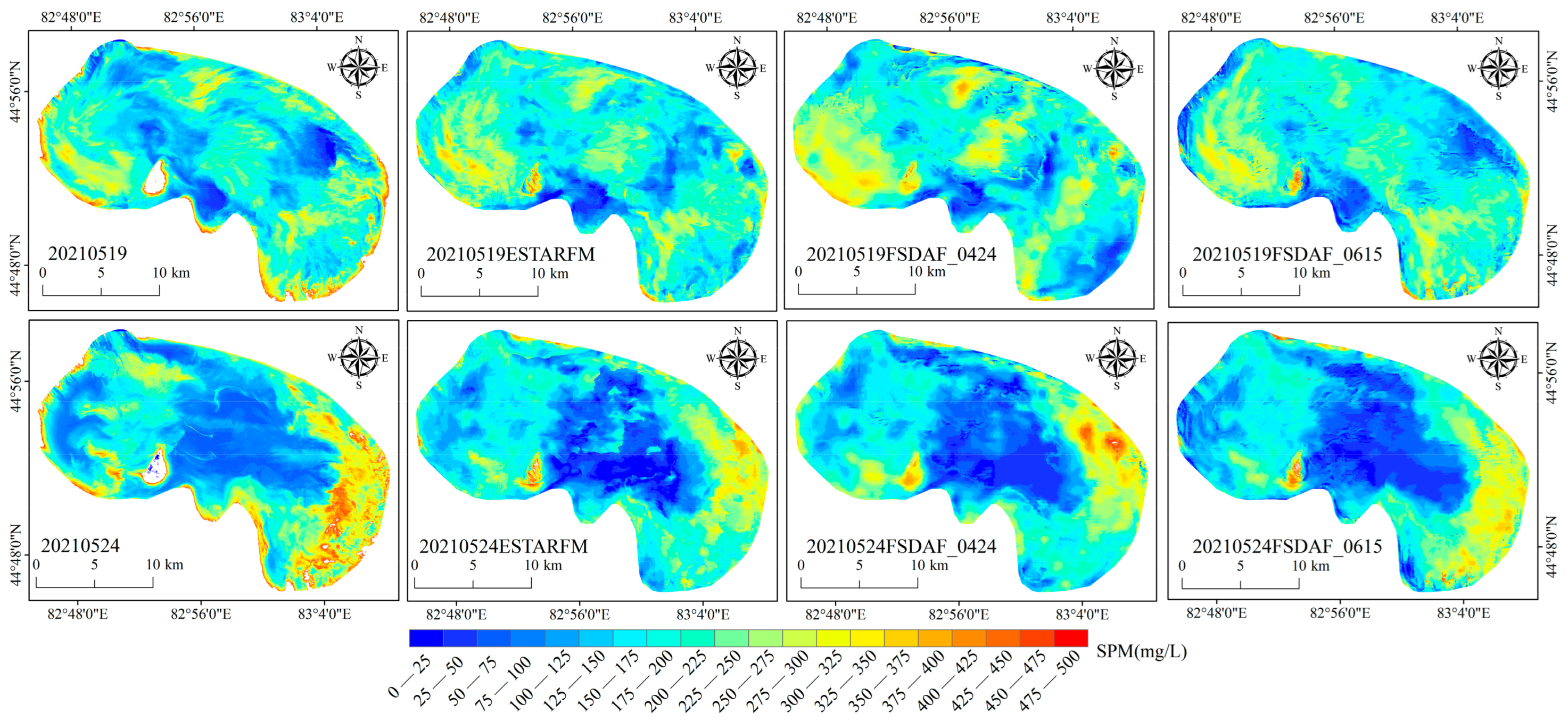
- Fusion Strategies: The Ebinur Lake SPM concentration map on 19 and 24 May 2021 was used as the reconstruction target. The Sentinel-2 and -3 SPM concentration inversion maps on 15 June and 24 April 2021 were used as the input image pairs for the ESTARFM model. ESTARFM fused SPM maps with a spatial resolution of 10 m that were predicted based on the Sentinel-3 images of 19 and 24 May 2021.
4.3. Spatio-Temporal Fusion Images Evaluation Indicators
4.4. SPM Evaluation Indicators
5. Results and Analysis
5.1. Spatio-Temporal Fusion Reflectance Image Reconstruction and Evaluation
5.2. Construction of the SPM Inversion Models for Sentinel-2 and Sentinel-3
5.3. SPM Images Reconstruction Strategy
5.3.1. Estimation of SPM Using the Spatio-Temporal Fusion Reflectance Image
5.3.2. Spatio-Temporal Fusion SPM
6. Discussion
6.1. Spatio-Temporal Fusion Algorithm
6.2. Accuracy of SPM Models
6.3. Spatio-Temporal Fusion Strategy
7. Conclusions
- The ESTARFM fusion of blue, green, red, and NIR bands was the best, among which the red band had the highest accuracy.
- The red band was determined to be the best choice for regression modeling based on an accurate assessment of the measurements and model stability analysis.
- The fused SPM concentration map proved to be better and more stable.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, C.; Zhang, F.; Wang, X.; Chan, N.W.; Rahman, H.A.; Yang, S.; Tan, M.L. Assessing the factors influencing water quality using environment water quality index and partial least squares structural equation model in the Ebinur Lake Watershed, Xinjiang, China. Environ. Sci. Pollut. Res. 2022, 29, 29033–29048. [Google Scholar] [CrossRef]
- Liu, D.; Abuduwaili, J.; Lei, J.; Wu, G.; Gui, D. Wind erosion of saline playa sediments and its ecological effects in Ebinur Lake, Xinjiang, China. Environ. Earth Sci. 2011, 63, 241–250. [Google Scholar] [CrossRef]
- Sagan, V.; Peterson, K.T.; Maimaitijiang, M.; Sidike, P.; Sloan, J.; Greeling, B.A.; Maalouf, S.; Adams, C. Monitoring inland water quality using remote sensing: Potential and limitations of spectral indices, bio-optical simulations, machine learning, and cloud computing. Earth-Sci. Rev. 2020, 205, 103187. [Google Scholar] [CrossRef]
- Liu, C.; Duan, P.; Zhang, F.; Jim, C.Y.; Tan, M.L.; Chan, N.W. Feasibility of the spatiotemporal fusion model in monitoring Ebinur Lake’s suspended particulate matter under the missing-data scenario. Remote Sens. 2021, 13, 3952. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; He, L.; Chen, J.; Plaza, A. A new sensor bias-driven spatio-temporal fusion model based on convolutional neural networks. Sci. China Inf. Sci. 2020, 63, 1–17. [Google Scholar] [CrossRef]
- Shevyrnogov, A.; Trefois, P.; Vysotskaya, G. Multi-satellite data merge to combine NOAA AVHRR efficiency with Landsat-6 MSS spatial resolution to study vegetation dynamics. Adv. Space Res. 2000, 26, 1131–1133. [Google Scholar] [CrossRef]
- Malenovsky, Z.; Bartholomeus, H.M.; Acerbi-Junior, F.W.; Schopfer, J.T.; Painter, T.H.; Epema, G.F.; Bregt, A.K. Scaling dimensions in spectroscopy of soil and vegetation. Int. J. Appl. Earth Obs. Geoinf. 2007, 9, 137–164. [Google Scholar] [CrossRef]
- Sun, L.; Gao, F.; Xie, D.H.; Anderson, M.; Chen, R.; Yang, Y.; Yang, Y.; Chen, Z. Reconstructing daily 30m NDVI over complex agricultural landscapes using a crop reference curve approach. Remote Sens. Environ. 2020, 253, 112156. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Cheng, Q.; Liu, H.; Shen, H.; Wu, P.; Zhang, L. A spatial and temporal nonlocal filter-based data fusion method. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4476–4488. [Google Scholar] [CrossRef]
- Wu, M.; Huang, W.; Niu, Z.; Wang, C. Generating daily synthetic Landsat imagery by combining Landsat and MODIS data. Sensors 2015, 15, 24002–24025. [Google Scholar] [CrossRef] [PubMed]
- Xie, D.; Zhang, J.; Zhu, X.; Pan, Y.; Liu, H.; Yuan, Z.; Yun, Y. An improved STARFM with help of an unmixing-based method to generate high spatial and temporal resolution remote sensing data in complex heterogeneous regions. Sensors 2016, 16, 207. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Helmer, E.H.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M.A. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Wang, Q.; Atkinson, P.M. Investigating the influence of registration errors on the patch-based spatio-temporal fusion method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6291–6307. [Google Scholar] [CrossRef]
- Huang, B.; Song, H. Spatiotemporal reflectance fusion via sparse representation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3707–3716. [Google Scholar] [CrossRef]
- Li, W.; Zhang, X.; Peng, Y.; Dong, M. Spatiotemporal fusion of remote sensing images using a convolutional neural network with attention and multiscale mechanisms. Int. J. Remote Sens. 2021, 42, 1973–1993. [Google Scholar] [CrossRef]
- Song, H.; Liu, Q.; Wang, G.; Hang, R.; Huang, B. Spatiotemporal satellite image fusion using deep convolutional neural networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 821–829. [Google Scholar] [CrossRef]
- Tan, Z.; Cao, Z.; Shen, M.; Chen, J.; Song, Q.; Duan, H. Remote estimation of water clarity and suspended particulate matter in qinghai lake from 2001 to 2020 using MODIS images. Remote Sens. 2022, 14, 3094. [Google Scholar] [CrossRef]
- Du, Y.; Song, K.; Liu, G.; Wen, Z.; Fang, C.; Shang, Y.; Zhao, F.; Wang, Q.; Du, J.; Zhang, B. Quantifying total suspended matter (TSM) in waters using Landsat images during 1984–2018 across the Songnen Plain, Northeast China. J. Environ. Manag. 2020, 262, 110334. [Google Scholar] [CrossRef]
- Ford, R.T.; Vodacek, A. Determining improvements in Landsat spectral sampling for inland water quality monitoring. Sci. Remote Sens. 2020, 1, 100005. [Google Scholar] [CrossRef]
- Liang, Z.; Zou, R.; Chen, X.; Ren, T.; Su, H.; Liu, Y. Simulate the forecast capacity of a complicated water quality model using the long short-term memory approach. J. Hydrol. 2020, 581, 124432. [Google Scholar] [CrossRef]
- Flink, P.; Lindell, L.T.; Östlund, C. Statistical analysis of hyperspectral data from two Swedish lakes. Sci. Total Environ. 2001, 268, 155–169. [Google Scholar] [CrossRef]
- Rotta, L.; Alcântara, E.; Park, E.; Bernardo, N.; Watanabe, F. A single semi-analytical algorithm to retrieve chlorophyll-a concentration in oligo-to-hypereutrophic waters of a tropical reservoir cascade. Ecol. Indic. 2021, 120, 106913. [Google Scholar] [CrossRef]
- Nechad, B.; Ruddick, K.G.; Park, Y. Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters. Remote Sens. Environ. 2010, 114, 854–866. [Google Scholar] [CrossRef]
- Alcântara, E.; Curtarelli, M.; Ogashawara, I.; Rosan, T.; Kampel, M.; Stech, J. Developing QAA-based retrieval model of total suspended matter concentration in Itumbiara reservoir. In Proceedings of the Brazil//2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 711–714. [Google Scholar]
- Sun, D.; Qiu, Z.; Hu, C.; Wang, S.; Wang, L.; Zheng, L.; Peng, T.; He, Y. A hybrid method to estimate suspended particle sizes from satellite measurements over Bohai Sea and Yellow Sea. J. Geophys. Res. Ocean. 2016, 121, 6742–6761. [Google Scholar] [CrossRef]
- Lei, S.; Xu, J.; Li, Y.; Li, L.; Lyu, H.; Liu, G.; Chen, Y.; Lu, C.; Tian, C.; Jiao, W. A semi-analytical algorithm for deriving the particle size distribution slope of turbid inland water based on OLCI data: A case study in Lake Hongze. Environ. Pollut. 2021, 270, 116288. [Google Scholar] [CrossRef]
- Salama, M.S.; Verhoef, W. Two-stream remote sensing model for water quality mapping: 2SeaColor. Remote Sens. Environ. 2015, 157, 111–122. [Google Scholar] [CrossRef]
- Liu, D.; Duan, H.; Yu, S.; Shen, M.; Xue, K. Human-induced eutrophication dominates the bio-optical compositions of suspended particles in shallow lakes: Implications for remote sensing. Sci. Total Environ. 2019, 667, 112–123. [Google Scholar] [CrossRef]
- Kishino, M.; Tanaka, A.; Ishizaka, J. Retrieval of chlorophyll a, suspended solids, and colored dissolved organic matter in Tokyo Bay using ASTER data. Remote Sens. Environ. 2005, 99, 66–74. [Google Scholar] [CrossRef]
- Wei, J.W.; Wang, M.H.; Jiang, L.D.; Yu, X.; Mikelsons, K.; Shen, F. Global Estimation of Suspended Particulate Matter From Satellite Ocean Color Imagery. J. Geophys. Res. Ocean. 2021, 126, e2021JC017303. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Wang, M. Global daily gap-free ocean color products from multi-satellite measurements. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102714. [Google Scholar] [CrossRef]
- Zhu, S.D.; Zhang, F.; Zhang, Z.Y.; Kung, H.; Yushanjiang, A. Hydrogen and oxygen isotope composition and water quality evaluation for different water bodies in the Ebinur Lake Watershed, Northwestern China. Water 2019, 11, 2067. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Wang, F.; Li, H.; Wang, P. Glacier changes from 1964 to 2004 in the Jinghe River basin, Tien Shan. Cold Reg. Sci. Technol. 2014, 102, 78–83. [Google Scholar] [CrossRef]
- Liu, C.J.; Zhang, F.; Johnson, V.C.; Duan, P.; Kung, H.T. Spatio-temporal variation of oasis landscape pattern in arid area: Human or natural driving? Ecol. Indic. 2021, 125, 107495–107509. [Google Scholar] [CrossRef]
- Catherine, K.; Aline, D.M.V.; Nick, W.; Luke, L.; Henrique, O.S.; Milton, K.; Jeffrey, R.; Philipp, S.; John, C.; Rob, S.; et al. Performance of Landsat-8 and Sentinel-2 surface reflectance products for river remote sensing retrievals of chlorophyll-a and turbidity. Remote Sens. Environ. 2019, 224, 104–118. [Google Scholar]
- Wen, Z.; Wang, Q.; Liu, G.; Jacinthe, P.A.; Wang, X.; Lyu, L.; Tao, H.; Ma, Y.; Duan, H.; Shang, Y.; et al. Remote sensing of total suspended matter concentration in lakes across China using Landsat images and Google Earth Engine. ISPRS J. Photogramm. Remote Sens. 2022, 187, 61–78. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of Sentinel-3 OLCI data for mapping of suspended particulate matter and chlorophyll-a concentration in Belgian turbid coastal waters. Remote Sens. Environ. 2021, 256, 112284. [Google Scholar] [CrossRef]
- Tavares, M.H.; Lins, R.C.; Harmel, T.; Fragoso, C.R., Jr.; Martínez, J.M.; Motta-Marques, D. Atmospheric and sunglint correction for retrieving chlorophyll-a in a productive tropical estuarine-lagoon system using Sentinel-2 MSI imagery. ISPRS J. Photogramm. Remote Sens. 2021, 174, 215–236. [Google Scholar] [CrossRef]
- Vanhellemont, Q. Adaptation of the dark spectrum fitting atmospheric correction for aquatic applications of the Landsat and Sentinel-2 archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Rieu, P.; Moreau, T.; Cadier, E.; Raynal, M.; Clerc, S.; Donlon, C.; Borde, F.; Boy, F.; Maraldi, C. Exploiting the Sentinel-3 tandem phase dataset and azimuth oversampling to better characterize the sensitivity of SAR altimeter sea surface height to long ocean waves. Adv. Space Res. 2021, 67, 253–265. [Google Scholar] [CrossRef]
- Xu, W.; Wooster, M.J.; Polehampton, E.; Yemelyanova, R.; Zhang, T. Sentinel-3 active fire detection and FRP product performance-Impact of scan angle and SLSTR middle infrared channel selection. Remote Sens. Environ. 2021, 261, 112460. [Google Scholar] [CrossRef]
- Xu, J.; Zhao, Y.; Lyu, H.; Liu, H.; Dong, X.; Li, Y.; Cao, K.; Xu, J.; Li, Y.; Wang, H.; et al. A semianalytical algorithm for estimating particulate composition in inland waters based on Sentinel-3 OLCI images. J. Hydrol. 2022, 608, 127617. [Google Scholar] [CrossRef]
- Zarei, A.; Shah-Hosseini, R.; Ranjbar, S.; Hasanlou, M. Validation of non-linear split window algorithm for land surface temperature estimation using Sentinel-3 satellite imagery: Case study; Tehran Province, Iran. Adv. Space Res. 2021, 67, 3979–3993. [Google Scholar] [CrossRef]
- Gou, J.; Tourian, M.J. Riwi. SAR-SWH: A data-driven method for estimating significant wave height using Sentinel-3 SAR altimetry. Adv. Space Res. 2022, 69, 2061–2080. [Google Scholar] [CrossRef]
- Odebiri, O.; Mutanga, O.; Odindi, J. Deep learning-based national scale soil organic carbon mapping with Sentinel-3 data. Geoderma 2022, 411, 115695. [Google Scholar] [CrossRef]
- Pahlevan, N.; Smith, B.; Schalles, J.; Binding, C.; Cao, Z.; Ma, R.; Alikas, K.; Kangro, K.; Gurlin, D.; Hà, N.; et al. Seamless retrievals of chlorophyll-a from Sentinel-2 (MSI) and Sentinel-3 (OLCI) in inland and coastal waters: A machine-learning approach. Remote Sens. Environ. 2020, 240, 111604. [Google Scholar] [CrossRef]
- Pahlevan, N.; Smith, B.; Alikas, K.; Anstee, J.; Barbosa, C.; Binding, C.; Bresciani, M.; Cremella, B.; Giardino, C.; Gurlin, D.; et al. Simultaneous retrieval of selected optical water quality indicators from Landsat-8, Sentinel-2, and Sentinel-3. Remote Sens. Environ. 2022, 270, 112860. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Hore, A.; Ziou, D. Image quality metrics: PSNR vs. SSIM. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 2366–2369. [Google Scholar]
- Thomas, G.W. The relationship between organic matter content and exchangeable aluminum in acid soil. Soil Sci. Soc. Am. J. 1975, 39, 591. [Google Scholar] [CrossRef]
- Klein, G.A. A recognition-primed decision (RPD) model of rapid decision making. Decis. Mak. Action Model. Methods 1993, 5, 138–147. [Google Scholar]
- Cao, Q.; Yu, G.; Qiao, Z. Application and recent progress of inland water monitoring using remote sensing techniques. Environ. Monit. Assess. 2023, 195, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Han, L.; Ding, J.; Ge, X.; He, B.; Wang, J.; Xie, B.; Zhang, Z. Using spatiotemporal fusion algorithms to fill in potentially absent satellite images for calculating soil salinity: A feasibility study. Int. J. Appl. Earth Obs. Geoinf. 2022, 111, 102839. [Google Scholar] [CrossRef]
- Li, P.; Ke, Y.; Wang, D.; Ji, H.; Chen, S.; Chen, M.; Lyu, M.; Zhou, D. Human impact on suspended particulate matter in the Yellow River Estuary, China: Evidence from remote sensing data fusion using an improved spatiotemporal fusion method. Sci. Total Environ. 2021, 750, 141612. [Google Scholar] [CrossRef] [PubMed]
- Song, K.; Ma, J.; Wen, Z.; Fang, C.; Shang, Y.; Zhao, Y.; Wang, M.; Du, J. Remote estimation of Kd (PAR) using MODIS and Landsat imagery for turbid inland waters in Northeast China. ISPRS J. Photogramm. Remote Sens. 2017, 123, 159–172. [Google Scholar] [CrossRef]
- Yu, X.; Lee, Z.; Shen, F.; Wang, M.; Wei, J.; Jiang, L.; Shang, Z. An empirical algorithm to seamlessly retrieve the concentration of suspended particulate matter from water color across ocean to turbid river mouths. Remote Sens. Environ. 2019, 235, 111491. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Description | S2A Center Wavelength (nm) | S2B Center Wavelength (nm) | Band Width (nm) | Spatial Resolution (m) |
|---|---|---|---|---|---|
| B1 | Coastal aerosol | 442.7 | 442.2 | 20 | 60 |
| B2 | Blue | 492.4 | 492.1 | 65 | 10 |
| B3 | Green | 559.8 | 559.0 | 35 | 10 |
| B4 | Red | 664.6 | 664.9 | 30 | 10 |
| B5 | Red-edge1 | 704.1 | 703.8 | 15 | 20 |
| B6 | Red-edge2 | 740.5 | 739.1 | 15 | 20 |
| B7 | Red-edge3 | 782.8 | 779.7 | 20 | 20 |
| B8 | NIR | 832.8 | 832.9 | 115 | 10 |
| B8a | Narrow NIR | 864.7 | 864.0 | 20 | 20 |
| B9 | Water vapor | 945.1 | 943.2 | 20 | 60 |
| B10 | Cirrus | 1373.5 | 1376.9 | 30 | 60 |
| B11 | SWIR1 | 1613.7 | 1610.4 | 90 | 20 |
| B12 | SWIR2 | 2202.4 | 2185.7 | 180 | 20 |
| Band | Center Wavelength (nm) | Wave Width (nm) | Noise-Signal Ratio |
|---|---|---|---|
| Oa1 | 400 | 15 | 2188 |
| Oa2 | 412.5 | 10 | 2061 |
| Oa3 | 442.5 | 10 | 1811 |
| Oa4(Blue) | 490 | 10 | 1541 |
| Oa5 | 510 | 10 | 1488 |
| Oa6(Green) | 560 | 10 | 1280 |
| Oa7 | 620 | 10 | 997 |
| Oa8(Red) | 665 | 10 | 883 |
| Oa9 | 673.5 | 7.5 | 707 |
| Oa10 | 681.25 | 7.5 | 745 |
| Oa11 | 708.75 | 10 | 785 |
| Oa12 | 753.75 | 7.5 | 605 |
| Oa13 | 761.25 | 7.5 | 232 |
| Oa14 | 764.38 | 3.75 | 305 |
| Oa15 | 767.5 | 2.5 | 330 |
| Oa16 | 778.75 | 15 | 812 |
| Oa17(NIR) | 865 | 20 | 666 |
| Oa18 | 885 | 10 | 395 |
| Oa19 | 900 | 10 | 308 |
| Oa20 | 940 | 20 | 203 |
| Oa21 | 1020 | 40 | 152 |
| Model | Regression Equation | R2 | p | |
|---|---|---|---|---|
| Sentinel-2 | Linear | 0.47 | <0.001 | |
| Polynomial | 0.47 | <0.001 | ||
| Power | 0.62 | <0.001 | ||
| Exponential | 0.63 | <0.001 | ||
| Sentinel-3 | Linear | 0.65 | <0.001 | |
| Polynomial | 0.66 | <0.001 | ||
| Power | 0.72 | <0.001 | ||
| Exponential | 0.73 | <0.001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, P.; Zhang, F.; Jim, C.-Y.; Tan, M.L.; Cai, Y.; Shi, J.; Liu, C.; Wang, W.; Wang, Z. Reconstruction of Sentinel Images for Suspended Particulate Matter Monitoring in Arid Regions. Remote Sens. 2023, 15, 872. https://doi.org/10.3390/rs15040872
Duan P, Zhang F, Jim C-Y, Tan ML, Cai Y, Shi J, Liu C, Wang W, Wang Z. Reconstruction of Sentinel Images for Suspended Particulate Matter Monitoring in Arid Regions. Remote Sensing. 2023; 15(4):872. https://doi.org/10.3390/rs15040872
Chicago/Turabian StyleDuan, Pan, Fei Zhang, Chi-Yung Jim, Mou Leong Tan, Yunfei Cai, Jingchao Shi, Changjiang Liu, Weiwei Wang, and Zheng Wang. 2023. "Reconstruction of Sentinel Images for Suspended Particulate Matter Monitoring in Arid Regions" Remote Sensing 15, no. 4: 872. https://doi.org/10.3390/rs15040872
APA StyleDuan, P., Zhang, F., Jim, C.-Y., Tan, M. L., Cai, Y., Shi, J., Liu, C., Wang, W., & Wang, Z. (2023). Reconstruction of Sentinel Images for Suspended Particulate Matter Monitoring in Arid Regions. Remote Sensing, 15(4), 872. https://doi.org/10.3390/rs15040872