
Efficient Implementation for SBL-Based Coherent Distributed mmWave Radar Imaging


Abstract
1. Introduction
- A signal model for the coherent distributed aperture imaging radar is established, and a forward-looking imaging method based on SBL is proposed;
- A novel form of low-displacement-rank decomposition with a block triangle and block cyclic matrix for the TBT matrix is established, and a fast SBL algorithm for gapped measured data based on the novel low-displacement-rank decomposition of the TBT matrix is proposed;
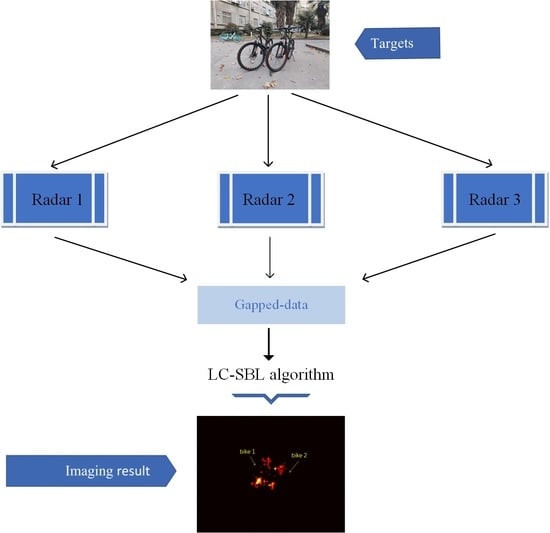
- A coherent distributed millimeter-wave forward-looking imaging radar system composed of three 77GHz millimeter-wave imaging radars was designed. The improvements in both the angular resolution of the coherent distributed radar imaging system and the performance of the LC-SBL algorithm were verified through experiments.
Notations
2. Signal Model for a Coherent Distributed Radar System and the SBL Algorithm
2.1. Distributed Radar System
2.2. Sparse Bayesian Learning Algorithm
| Algorithm 1 Sparse Bayesian Learning (SBL algorithm) |
| 1: Input r, H, a, b, c and d. We set a = b =c = d = . Let M (N) equal the number of rows (columns) of H. 2: Initialize parameter . We set (), and Q and are determined according to Equations (12) and (13). 3: Set a threshold to determine if satisfies Equation (9). 4: while do 5: for i = 1: N do 6: 7: 8: end 9: 10: 11: (12) 12: (13) 13: (14) 14: end 15: Return |
3. LC-SBL Fast SBL Algorithm
3.1. Calculation Method for Matrix Q and 2D L-D Algorithm
| Algorithm 2 Two-dimensional (2D) L-D algorithm |
| 1: Input and (similar to in F). 2: Initialize parameters W and Y as follows 3: for i = 2: w−1 do 4: 5: O is a zero matrix. 6: 7: end 8: 9: Return s, x |
3.2. Decomposition of Matrix
3.3. Wxpet Algorithm
| Algorithm 3 Compute (Wxpet algorithm) |
| 1: Input x, s and r. 2: for t = 1:2; (the first block column of ), (the first block column of ) 3: for i = 1:n 4: for j = 1:n 5: end 6: for j = 1:n discard redundant convolution results 7: end 8: 9: end 10: end 11: 12: 13: Return |
3.4. Vara Algorithm
| Algorithm 4 Compute h (Vara Algorithm) |
| 1: Input x and s 2: for t = 1:2 the first block column of , the first block column of 3: for i = 1:n 4: for j = 1:n 5: end 6: for s = 1:n 7: += [zeros(2m−1, t−1) Diag ] 8: end 9: 10: end 11: 12: We obtain and by adding zeros in vector K 13: 14: Return h |
4. Simulation and Measured-Data Processing Results
4.1. Simulation of Angular Resolution of Several Algorithms
4.2. nRMSE Values and Running Times of the Algorithms
4.3. Measured Data Imaging
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wei, S.; Zhou, Z.; Wang, M.; Wei, J.; Liu, S.; Shi, J.; Zhang, X.; Fan, F. 3DRIED: A High-Resolution 3-D Millimeter-Wave Radar Dataset Dedicated to Imaging and Evaluation. Remote Sens. 2021, 13, 3366. [Google Scholar] [CrossRef]
- Gottinger, M.; Hoffmann, M.; Christmann, M. Coherent automotive radar networks: The next generation of radar-based im-aging and mapping. IEEE J. Microw. 2021, 1, 149–163. [Google Scholar] [CrossRef]
- Wang, Z.; Miao, X.; Huang, Z.; Luo, H. Research of Target Detection and Classification Techniques Using Millimeter-Wave Radar and Vision Sensors. Remote Sens. 2021, 13, 1064. [Google Scholar] [CrossRef]
- Munte, N.; Lazaro, A.; Villarino, R.; Girbau, D. Vehicle Occupancy Detector Based on FMCW mm-Wave Radar at 77 GHz. IEEE Sensors J. 2022, 22, 24504–24515. [Google Scholar] [CrossRef]
- Zhang, B.; Xu, G.; Zhou, R.; Zhang, H.; Hong, W. Multi-Channel Back-Projection Algorithm for Mmwave Automotive MIMO SAR Imaging with Doppler-Division Multiplexing. IEEE J. Sel. Top. Signal Process. 2022, PP, 1–13. [Google Scholar] [CrossRef]
- Schwarz, D.; Riese, N.; Dorsch, I.; Waldschmidt, C. System Performance of a 79 GHz High-Resolution 4D Imaging MIMO Radar with 1728 Virtual Channels. IEEE J. Microw. 2022, 2, 637–647. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, H.; Chen, Y.; Zhou, Y.; Peng, Y. Urban Traffic Imaging Using Millimeter-Wave Radar. Remote Sens. 2022, 14, 5416. [Google Scholar] [CrossRef]
- Liu, P.; Yu, G.; Wang, Z.; Zhou, B.; Chen, P. Object Classification Based on Enhanced Evidence Theory: Radar–Vision Fusion Approach for Roadside Application. IEEE Trans. Instrum. Meas. 2022, 71, 5006412. [Google Scholar] [CrossRef]
- Huang, X.; Dong, X.; Ma, J.; Liu, K.; Ahmed, S.; Lin, J.; Qiu, B. The Improved A* Obstacle Avoidance Algorithm for the Plant Protection UAV with Millimeter Wave Radar and Monocular Camera Data Fusion. Remote Sens. 2021, 13, 3364. [Google Scholar] [CrossRef]
- Wilson, A.N.; Kumar, A.; Jha, A.; Cenkeramaddi, L.R. Embedded Sensors, Communication Technologies, Computing Platforms and Machine Learning for UAVs: A Review. IEEE Sensors J. 2021, 22, 1807–1826. [Google Scholar] [CrossRef]
- Zhao, Y.; Yarovoy, A.; Fioranelli, F. Angle-Insensitive Human Motion and Posture Recognition Based on 4D Imaging Radar and Deep Learning Classifiers. IEEE Sensors J. 2022, 22, 12173–12182. [Google Scholar] [CrossRef]
- Ando, T.; Kidera, S. Accurate Micro-Doppler Analysis by Doppler and $k$-Space Decomposition for Millimeter Wave Short-Range Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2022, 15, 2503–2518. [Google Scholar] [CrossRef]
- Antolinos, E.; García-Rial, F.; Hernández, C.; Montesano, D.; Godino-Llorente, J.I.; Grajal, J. Cardiopulmonary Activity Mon-itoring Using Millimeter Wave Radars. Remote Sens. 2020, 12, 2265. [Google Scholar] [CrossRef]
- Li, G.; Ge, Y.; Wang, Y.; Chen, Q.; Wang, G. Detection of Human Breathing in Non-Line-of-Sight Region by Using mmWave FMCW Radar. IEEE Trans. Instrum. Meas. 2022, 71, 8006311. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, Y.; Zhang, Y.; Huang, Y.; Yang, J. A Sparse Denoising-Based Super-Resolution Method for Scanning Radar Imaging. Remote Sens. 2021, 13, 2768. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, Y.; Huang, Y.; Zhang, Y.; Pei, J.; Yi, Q.; Li, W.; Yang, J. TV-Sparse Super-Resolution Method for Radar Forward-Looking Imaging. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 6534–6549. [Google Scholar] [CrossRef]
- Cong, J.; Wang, X.; Lan, X.; Huang, M.; Wan, L. Fast Target Localization Method for FMCW MIMO Radar via VDSR Neural Network. Remote Sens. 2021, 13, 1956. [Google Scholar] [CrossRef]
- Nanzer, J.A.; Mghabghab, S.R.; Ellison, S.M.; Schlegel, A. Distributed Phased Arrays: Challenges and Recent Advances. IEEE Trans. Microw. Theory Tech. 2021, 69, 4893–4907. [Google Scholar] [CrossRef]
- Coutts, S.; Cuomo, K.; McHarg, J. Distributed coherent aperture measurements for next generation BMD radar. In Proceedings of the Fourth IEEE Workshop on Sensor Array and Multichannel Processing, Waltham, MA, USA, 12–14 July 2006; pp. 390–393. [Google Scholar]
- Seo, J.; Hwang, S.; Hong, Y.-G.; Park, J.; Hwang, S.; Byun, W.-J. Bayesian Matching Pursuit-Based Distributed FMCW MIMO Radar Imaging. IEEE Syst. J. 2020, 15, 4623–4634. [Google Scholar] [CrossRef]
- Mansour, H.; Liu, D.; Kamilov, U.S.; Boufounos, P.T. Sparse Blind Deconvolution for Distributed Radar Autofocus Imaging. IEEE Trans. Comput. Imaging 2018, 4, 537–551. [Google Scholar] [CrossRef]
- Cuomo, K.M.; Piou, J.E.; Mayhan, J.T. Ultra-wideband coherent processing. Linc. Lab. J. 1997, 10, 203–222. [Google Scholar]
- Larsson, E.G.; Li, J. Spectral analysis of periodically gapped data. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1089–1097. [Google Scholar] [CrossRef]
- Glentis, G.-O.; Jakobsson, A. Efficient Implementation of Iterative Adaptive Approach Spectral Estimation Techniques. IEEE Trans. Signal Process. 2011, 59, 4154–4167. [Google Scholar] [CrossRef]
- Kang, M.S.; Lee, S.J.; Lee, S.H. ISAR imaging of high-speed maneuvering target using gapped stepped-frequency waveform and compressive sensing. IEEE Trans. Image Process. 2017, 26, 5043–5056. [Google Scholar] [CrossRef] [PubMed]
- Tropp, J.A.; Gilbert, A.C. Signal Recovery from Random Measurements via Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Ji, S.; Xue, Y.; Carin, L. Bayesian compressive sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Shutin, D.; Buchgraber, T.; Kulkarni, S.R.; Poor, H.V. Fast Variational Sparse Bayesian Learning with Automatic Relevance Determination for Superimposed Signals. IEEE Trans. Signal Process. 2011, 59, 6257–6261. [Google Scholar] [CrossRef]
- Tipping, M.E.; Faul, A.C. Fast marginal likelihood maximisation for sparse Bayesian models. In Proceedings of the International Workshop on Artificial Intelligence and Statistics, Key West, FL, USA, 3–6 January 2003; Volume 1, pp. 276–283. [Google Scholar]
- Al-Shoukairi, M.; Schniter, P.; Rao, B.D. A GAMP-Based Low Complexity Sparse Bayesian Learning Algorithm. IEEE Trans. Signal Process. 2017, 66, 294–308. [Google Scholar] [CrossRef]
- Tan, X.; Li, J. Computationally Efficient Sparse Bayesian Learning via Belief Propagation. IEEE Trans. Signal Process. 2010, 58, 2010–2021. [Google Scholar] [CrossRef]
- Duan, H.; Yang, L.; Fang, J.; Li, H. Fast Inverse-Free Sparse Bayesian Learning via Relaxed Evidence Lower Bound Maximization. IEEE Signal Process. Lett. 2017, 24, 774–778. [Google Scholar] [CrossRef]
- Zhou, W.; Zhang, H.-T.; Wang, J. An Efficient Sparse Bayesian Learning Algorithm Based on Gaussian-Scale Mixtures. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 3065–3078. [Google Scholar] [CrossRef] [PubMed]
- Tang, Y.; Lu, Y. Single transceiver-based time division multiplexing multiple-input–multiple-output digital beamforming radar system: Concepts and experiments. IET Radar Sonar Navig. 2014, 8, 368–375. [Google Scholar] [CrossRef]
- Robey, F.C.; Coutts, S.; Weikle, D. MIMO radar theory and experimental results. Conf. Rec. Thirty-Eighth Asilomar Conf. Signals Syst. Comput. 2004, 1, 300–304. [Google Scholar]
- Sun, H.; Brigui, F.; Lesturgie, M. Analysis and comparison of MIMO radar waveforms. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Zhang, Z.; Rao, B.D. Sparse Signal Recovery with Temporally Correlated Source Vectors Using Sparse Bayesian Learning. IEEE J. Sel. Top. Signal Process. 2011, 5, 912–926. [Google Scholar] [CrossRef]
- Wipf, D.; Rao, B. Sparse Bayesian Learning for Basis Selection. IEEE Trans. Signal Process. 2004, 52, 2153–2164. [Google Scholar] [CrossRef]
- Gohberg, I.; Olshevsky, V. Circulants, displacements and decompositions of matrices. Integral Equ. Oper. Theory 1992, 15, 730–743. [Google Scholar] [CrossRef]
- Lv, X.-G.; Huang, T.-Z. The Inverses of Block Toeplitz Matrices. J. Math. 2013, 2013, 207176. [Google Scholar] [CrossRef]
- Dai, F.; Wang, Y.; Hong, L. Gohberg-Semencul Factorization-Based Fast Implementation of Sparse Bayesian Learning with a Fourier Dictionary. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, Y.; Li, X. Autofocusing for Sparse Aperture ISAR Imaging Based on Joint Constraint of Sparsity and Minimum Entropy. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2016, 10, 998–1011. [Google Scholar] [CrossRef]
- Xi, L.; Guosui, L.; Ni, J. Autofocusing of ISAR images based on entropy minimization. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1240–1252. [Google Scholar] [CrossRef]
- Kang, M.-S.; Bae, J.-H.; Lee, S.-H.; Kim, K.-T. Efficient ISAR autofocus via minimization of Tsallis Entropy. IEEE Trans. Aerosp. Electron. Syst. 2017, 52, 2950–2960. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LC-SBL | SBL | FIAA | OMP | S-ESBL | FFD-SBL | |
|---|---|---|---|---|---|---|
| Time (s) | 0.431 | 11.319 | 1.327 | 0.019 | 0.910 | 0.442 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, F.; Li, Y.; Wang, Y.; Chen, H. Efficient Implementation for SBL-Based Coherent Distributed mmWave Radar Imaging. Remote Sens. 2023, 15, 1054. https://doi.org/10.3390/rs15041054
Dai F, Li Y, Wang Y, Chen H. Efficient Implementation for SBL-Based Coherent Distributed mmWave Radar Imaging. Remote Sensing. 2023; 15(4):1054. https://doi.org/10.3390/rs15041054
Chicago/Turabian StyleDai, Fengzhou, Yuhang Li, Yuanyuan Wang, and Hao Chen. 2023. "Efficient Implementation for SBL-Based Coherent Distributed mmWave Radar Imaging" Remote Sensing 15, no. 4: 1054. https://doi.org/10.3390/rs15041054
APA StyleDai, F., Li, Y., Wang, Y., & Chen, H. (2023). Efficient Implementation for SBL-Based Coherent Distributed mmWave Radar Imaging. Remote Sensing, 15(4), 1054. https://doi.org/10.3390/rs15041054