
Optimizing Back-Propagation Neural Network to Retrieve Sea Surface Temperature Based on Improved Sparrow Search Algorithm
Abstract
:
1. Introduction
2. Data and Preprocessing
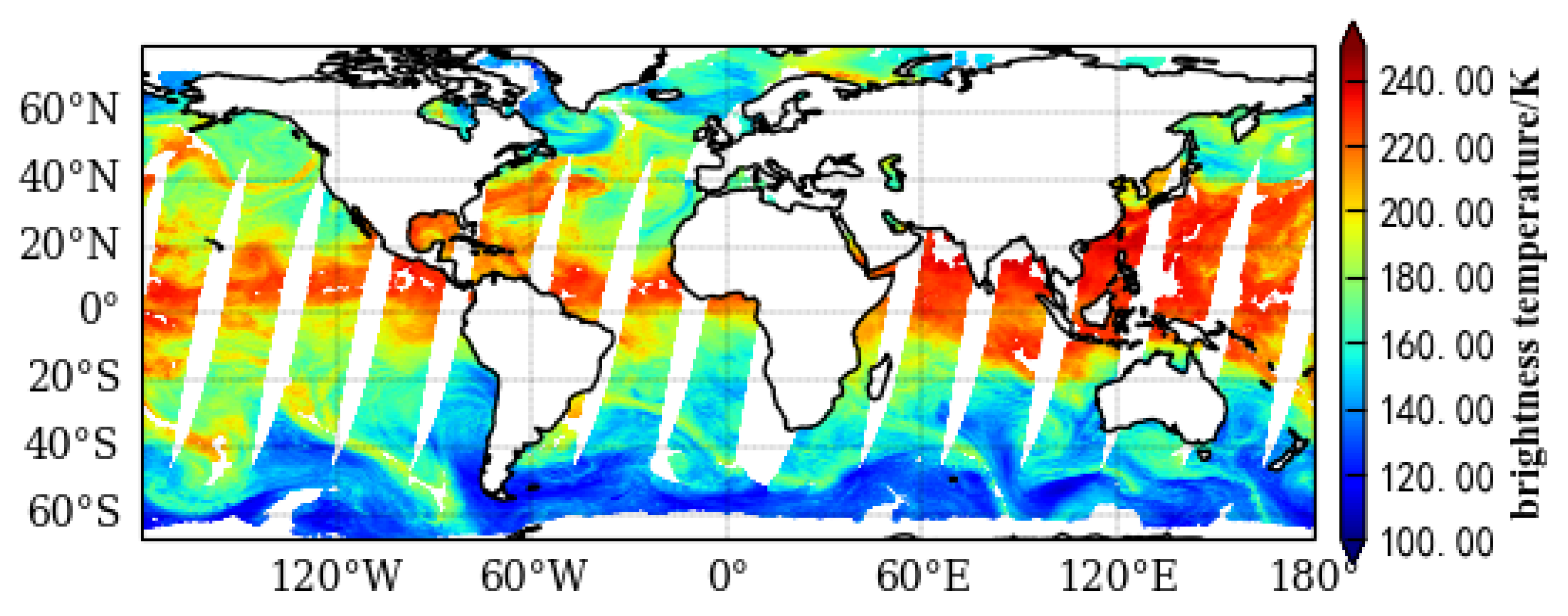
2.1. Data Presentation
2.2. Preprocessing
3. Methods
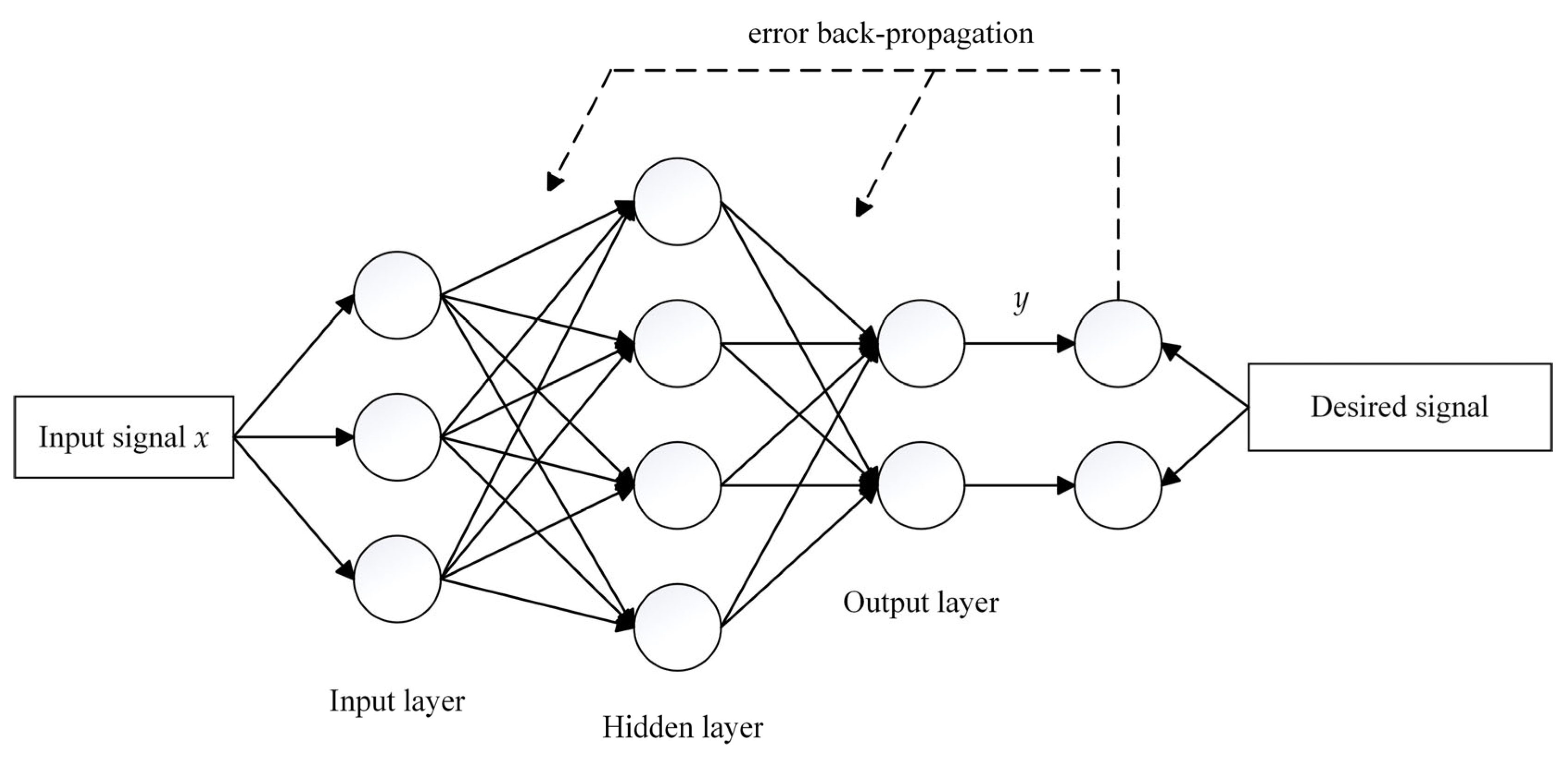
3.1. BP Neural Network
3.2. Sparrow Search Algorithm (SSA)
3.2.1. Determine the Fitness Value of Each Position
3.2.2. Updating Finder Locations
3.2.3. Update Follower Position
3.2.4. Detection and Early Warning
3.3. Multistrategy Improved Sparrow Search Algorithm (ISSA)
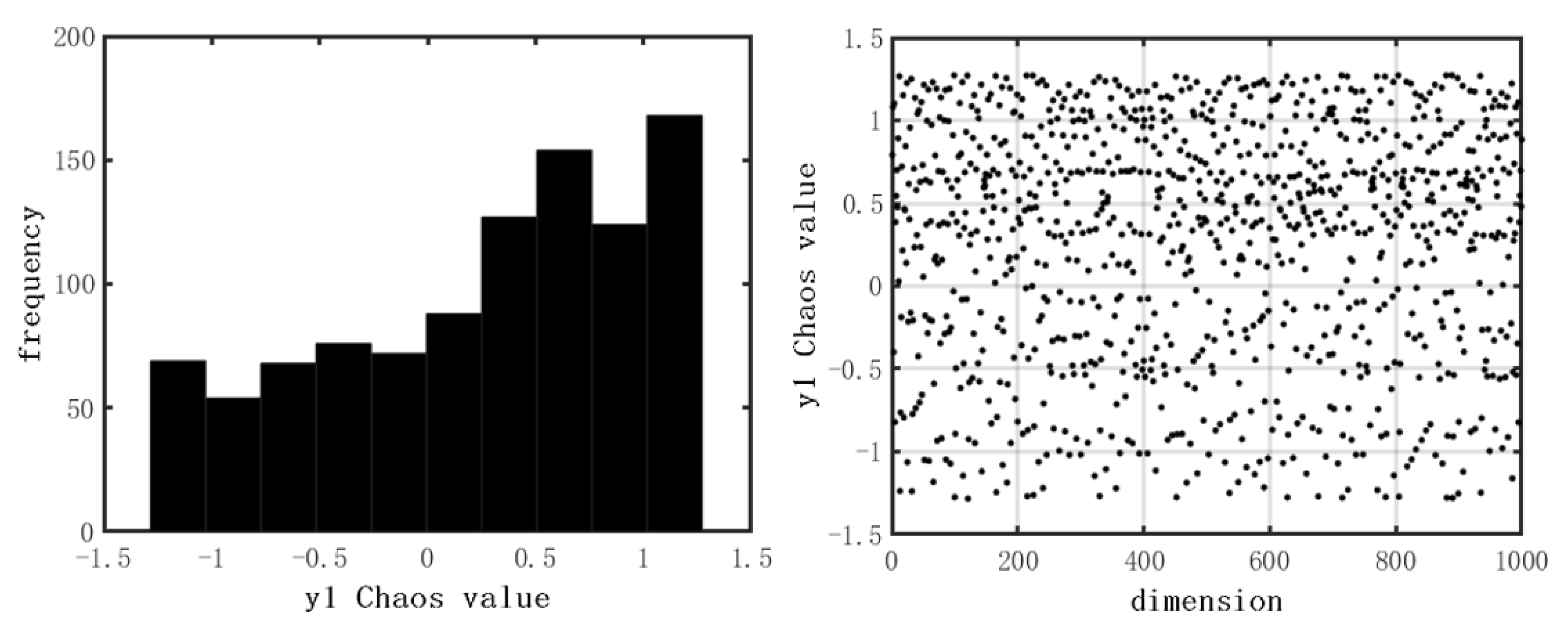
3.3.1. Hénon Chaotic Mapping
3.3.2. Multidirectional Learning Strategies
3.3.3. Crossover and Mutation
3.4. ISSA-BP Neural Network Approach for SST Retrieval
3.4.1. Neural Network Algorithm Initialization
3.4.2. SSA Parameter Initialization
4. Experiments and Results
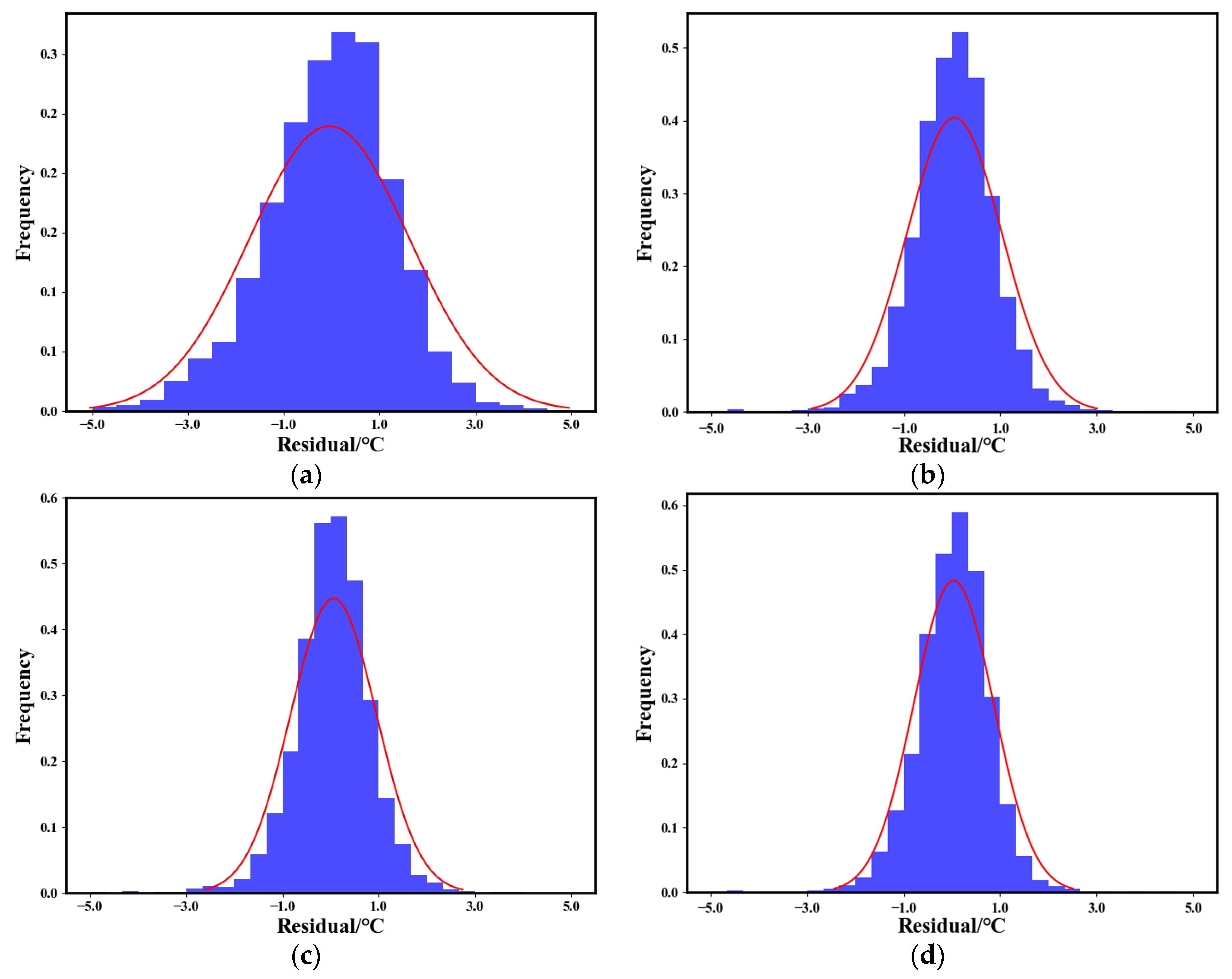
4.1. Comparing Multiple Models to Retrieve SST with In Situ SST
- (1)
- ISSA-BP model compared to the MLR model: the RMSE decreased by 50.41%, the MAE decreased by 47.75%, the MAPE decreased by 49.85%, and the R2 increased by 2.81%.
- (2)
- ISSA-BP model compared to the base BP neural network model: the RMSE decreased by 16.33%, the MAE decreased by 12.41%, the MAPE decreased by 24.38%, and the R2 increased by 0.36%.
- (3)
- ISSA-BP model compared to the SSA-BP model: the RMSE decreased by 7.64%, the MAE decreased by 3.48%, the MAPE decreased by 8.93%, and the R2 increased by 0.15%.
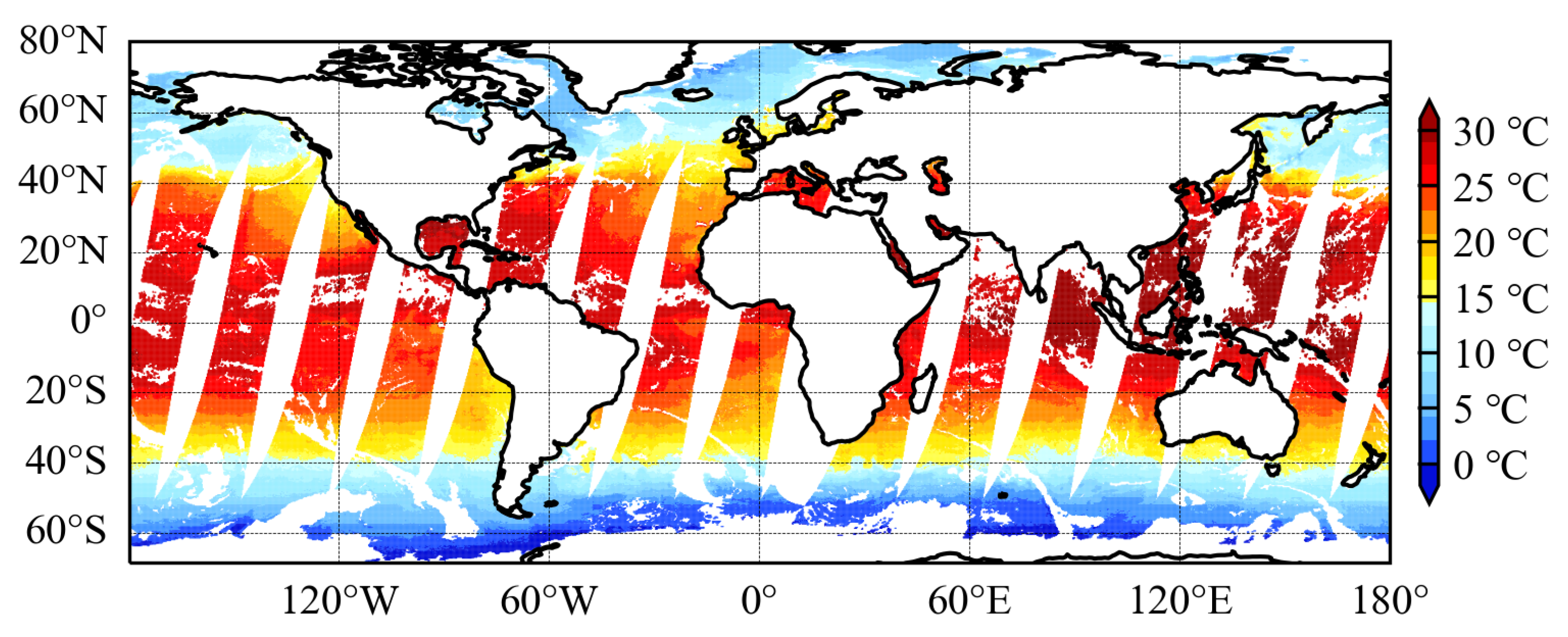
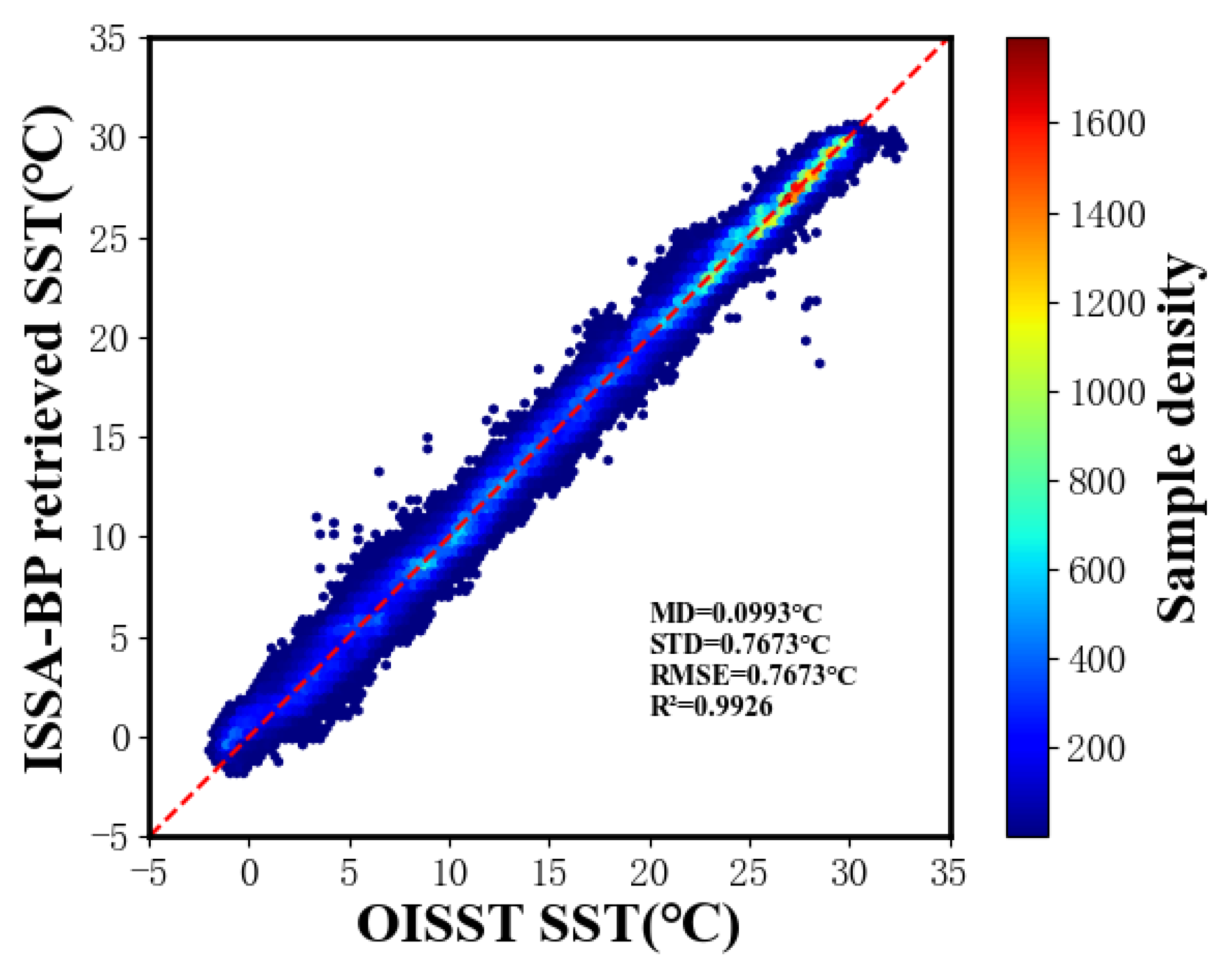
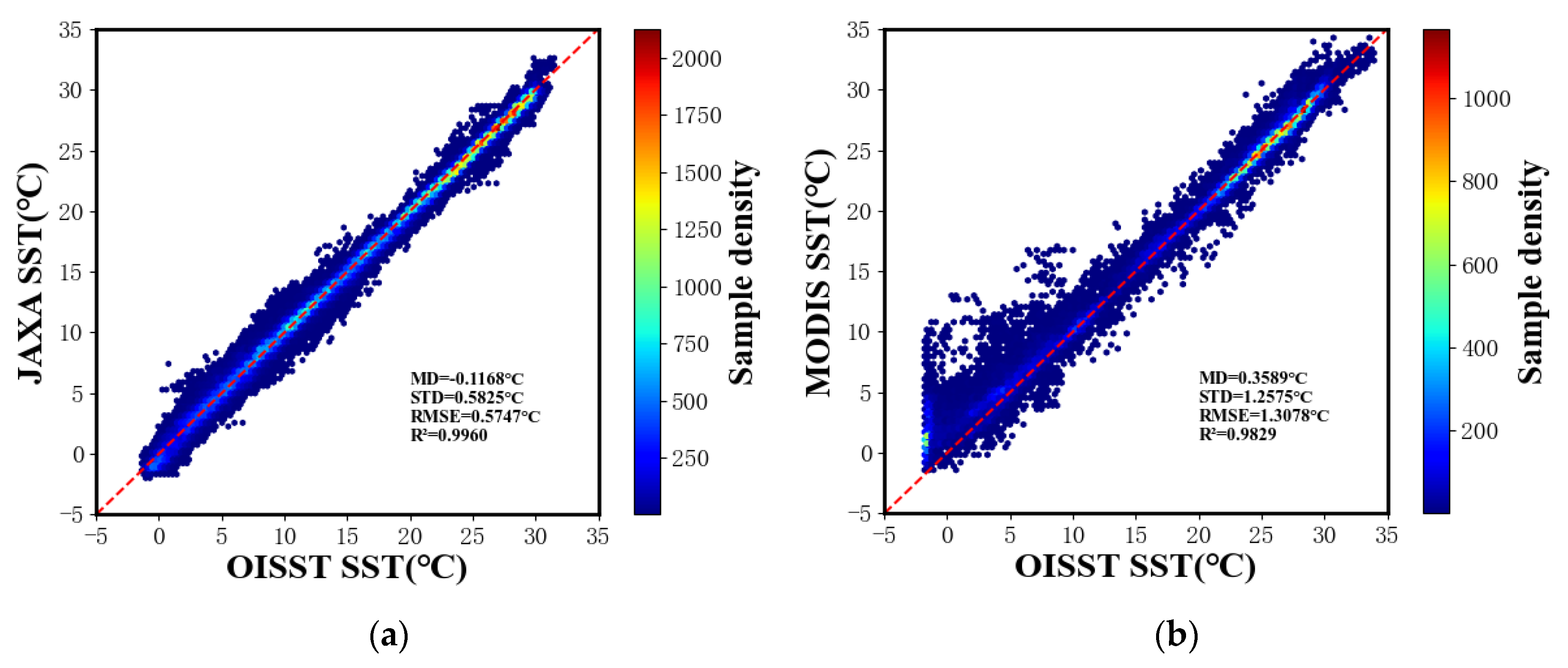
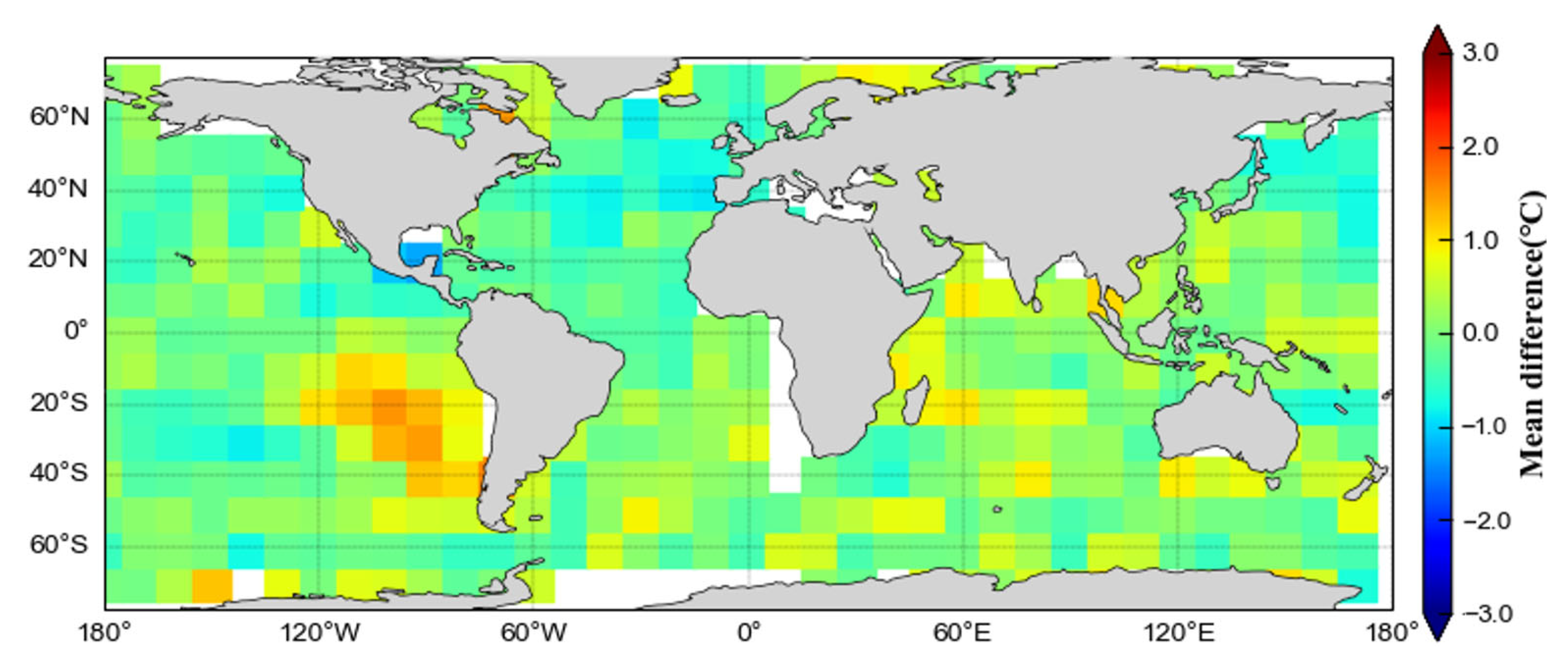
4.2. Comparison of ISSA-BP Model Retrieval Results with Multiple SST Products
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kawai, Y.; Wada, A. Diurnal sea surface temperature variation and its impact on the atmosphere and ocean: A review. J. Oceanogr. 2007, 63, 721–744. [Google Scholar] [CrossRef]
- Chelton, D.B.; Wentz, F.J. Global microwave satellite observations of sea surface temperature for numerical weather prediction and climate research. Bull. Am. Meteorol. Soc. 2005, 86, 1097–1116. [Google Scholar] [CrossRef]
- Kent, E.C.; Kennedy, J.J.; Smith, T.M.; Hirahara, S.; Huang, B.; Kaplan, A.; Parker, D.E.; Atkinson, C.P.; Berry, D.I.; Carella, G. A call for new approaches to quantifying biases in observations of sea surface temperature. Bull. Am. Meteorol. Soc. 2017, 98, 1601–1616. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, C.; Shang, S. Validation and inter-comparison of multi-satellite merged sea surface temperature products in the South China Sea and its adjacent waters. J. Remote Sens. 2015, 19, 328–338. [Google Scholar]
- Sun, L.; Wang, J.; Cui, Y.; Hao, Y.; Zhang, J. Statistical retrieval algorithms of the sea surface temperature (SST) and wind speed (SSW) for FY-3B Microwave Radiometer Imager (MWRI). J. Remote Sens. 2012, 16, 1262–1271. [Google Scholar]
- Wang, Y.; Fu, Y.; Liu, Q.; Liu, G.; Liu, X.; Cheng, J. An algorithm for sea surface temperature retrieval based on TMI measurements. Acta Meteorol. Sin. 2011, 69, 149–160. [Google Scholar]
- Milman, A.; Wilheit, T. Sea surface temperatures from the scanning multichannel microwave radiometer on Nimbus 7. J. Geophys. Res. Oceans 1985, 90, 11631–11641. [Google Scholar] [CrossRef]
- Wentz, F.J.; Gentemann, C.; Smith, D.; Chelton, D. Satellite measurements of sea surface temperature through clouds. Science 2000, 288, 847–850. [Google Scholar] [CrossRef]
- Han, Z.; Huo, W.; Wang, S. Retrieval of sea surface temperature from AMSR-E and MODIS in the northern Indian ocean. In Proceedings of the 2012 2nd International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 1–3 June 2012; pp. 1–4. [Google Scholar]
- Shibata, A. Improvement of AMSR-E SST by considering an elaborate correction of wind effect. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium (IGARSS’05), Seoul, Republic of Korea, 29 July 2005; pp. 2612–2613. [Google Scholar]
- Wang, Z.; Li, Y. Retrieval of marine geophysical parameters using spaceborne microwave radiometer AMSR-E data. J. Remote Sens. 2009, 13, 363–370. [Google Scholar] [CrossRef]
- Krasnopolsky, V.M. Neural network emulations for complex multidimensional geophysical mappings: Applications of neural network techniques to atmospheric and oceanic satellite retrievals and numerical modeling. Rev. Geophys. 2007, 45, 3. [Google Scholar] [CrossRef]
- Krasnopolsky, V.; Breaker, L.; Gemmill, W. A neural network as a nonlinear transfer function model for retrieving surface wind speeds from the special sensor microwave imager. J. Geophys. Res. Oceans 1995, 100, 11033–11045. [Google Scholar] [CrossRef]
- Krasnopolsky, V.M.; Gemmill, W.H.; Breaker, L.C. A neural network multiparameter algorithm for SSM/I ocean retrievals: Comparisons and validations. Remote Sens. Environ. 2000, 73, 133–142. [Google Scholar] [CrossRef]
- Meng, L.; He, Y.; Chen, J.; Wu, Y. Neural network retrieval of ocean surface parameters from SSM/I data. Mon. Weather Rev. 2007, 135, 586–597. [Google Scholar] [CrossRef]
- Alerskans, E.; Zinck, A.-S.P.; Nielsen-Englyst, P.; Høyer, J.L. Exploring machine learning techniques to retrieve sea surface temperatures from passive microwave measurements. Remote Sens. Environ. 2022, 281, 113–220. [Google Scholar] [CrossRef]
- Qi, G.; Wei, D. Prediction of hydroelectric engineering cost index based on GA-BP neural network. Water Resour. Power 2018, 36, 162–164. [Google Scholar]
- Shi, L.; Ding, X.; Li, M.; Liu, Y. Research on the capability maturity evaluation of intelligent manufacturing based on firefly algorithm, sparrow search algorithm, and BP neural network. Complexity 2021, 2021, 5554215. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Alerskans, E.; Høyer, J.L.; Gentemann, C.L.; Pedersen, L.T.; Nielsen-Englyst, P.; Donlon, C. Construction of a climate data record of sea surface temperature from passive microwave measurements. Remote Sens. Environ. 2020, 236, 111–485. [Google Scholar] [CrossRef]
- Block, T.; Embacher, S.; Merchant, C.J.; Donlon, C. High-performance software framework for the calculation of satellite-to-satellite data matchups (MMS version 1.2). Geosci. Model Dev. 2018, 11, 2419–2427. [Google Scholar] [CrossRef]
- Nielsen-Englyst, P.; Høyer, J.L.; Toudal Pedersen, L.; Gentemann, C.L.; Alerskans, E.; Block, T.; Donlon, C. Optimal estimation of sea surface temperature from AMSR-E. Remote Sens. 2018, 10, 229. [Google Scholar] [CrossRef]
- Imaoka, K.; Maeda, T.; Kachi, M.; Kasahara, M.; Ito, N.; Nakagawa, K. Status of AMSR2 instrument on GCOM-W1. In Proceedings of the Earth Observing Missions and Sensors: Development, Implementation, and Characterization II, Kyoto, Japan, 30 October–1 November 2012; pp. 201–206. [Google Scholar]
- Hihara, T.; Kubota, M.; Okuro, A. Evaluation of sea surface temperature and wind speed observed by GCOM-W1/AMSR2 using in situ data and global products. Remote Sens. Environ. 2015, 164, 170–178. [Google Scholar] [CrossRef]
- Alsweiss, S.O.; Jelenak, Z.; Chang, P.S. Remote sensing of sea surface temperature using AMSR-2 measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3948–3954. [Google Scholar] [CrossRef]
- Pearson, K.; Merchant, C.; Embury, O.; Donlon, C. The role of advanced microwave scanning radiometer 2 channels within an optimal estimation scheme for sea surface temperature. Remote Sens. 2018, 10, 90. [Google Scholar] [CrossRef]
- Argo Data Management Team. Argo User’s Manual v3.3; Argo Data Management Team: Brest, France, 2019. [Google Scholar]
- Dee, D.; Uppala, S.; Simmons, A.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteor. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Kilic, L.; Prigent, C.; Aires, F.; Boutin, J.; Heygster, G.; Tonboe, R.T.; Roquet, H.; Jimenez, C.; Donlon, C. Expected performances of the Copernicus Imaging Microwave Radiometer (CIMR) for an all-weather and high spatial resolution estimation of ocean and sea ice parameters. J. Geophys. Res. Oceans 2018, 123, 7564–7580. [Google Scholar] [CrossRef]
- Wu, Y.; Weng, F. Detection and correction of AMSR-E radio-frequency interference. Acta Meteorol. Sin. 2011, 25, 669–681. [Google Scholar] [CrossRef]
- McCelland, J.; Rumelhart, D. Backprop; PDP Group: Hunt Valley, MD, USA, 1986; Volume 1, p. V2. [Google Scholar]
- Marotto, F.R. Chaotic behavior in the Hénon mapping. Commun. Math. Phys. 1979, 68, 187–194. [Google Scholar] [CrossRef]
- Yang, L.; Shami, A. On hyperparameter optimization of machine learning algorithms: Theory and practice. Neurocomputing 2020, 415, 295–316. [Google Scholar] [CrossRef]
- Srivastava, N. Improving neural networks with dropout. Univ. Tor. 2013, 182, 7. [Google Scholar]
- Reynolds, R.W.; Smith, T.M.; Liu, C.; Chelton, D.B.; Casey, K.S.; Schlax, M.G. Daily high-resolution-blended analyses for sea surface temperature. J. Clim. 2007, 20, 5473–5496. [Google Scholar] [CrossRef]
- Zhang, B.; Yu, X.; Perrie, W.; Zhou, F. Air–Sea Interface Parameters and Heat Flux from Neural Network and Advanced Microwave Scanning Radiometer Observations. Remote Sens. 2022, 14, 2364. [Google Scholar] [CrossRef]
- Wang, S.; Zhou, W.; Li, Y.; Yin, X.; Lv, X.; Xiang, K. Coastal Sea Surface Temperature Inversion from Microwave Radiometer using Radial Basis Function Neural Network. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15–19 December 2021; pp. 455–459. [Google Scholar]
- Ai, B.; Wen, Z.; Jiang, Y.; Gao, S.; Lv, G. Sea surface temperature inversion model for infrared remote sensing images based on deep neural network. Infrared Phys. Technol. 2019, 99, 231–239. [Google Scholar] [CrossRef]
- Zheng, G.; Yang, J.; Li, X.; Zhou, L.; Ren, L.; Chen, P.; Zhang, H.; Lou, X. Using artificial neural network ensembles with crogging resampling technique to retrieve sea surface temperature from HY-2A scanning microwave radiometer data. IEEE Trans. Geosci. Remote Sens. 2018, 57, 985–1000. [Google Scholar] [CrossRef]
- Gentemann, C.L.; Hilburn, K.A. In situ validation of sea surface temperatures from the GCOM-W 1 AMSR 2 RSS calibrated brightness temperatures. J. Geophys. Res. Oceans 2015, 120, 3567–3585. [Google Scholar] [CrossRef]
- Gentemann, C.L.; Meissner, T.; Wentz, F.J. Accuracy of satellite sea surface temperatures at 7 and 11 GHz. IEEE Trans. Geosci. Remote Sens. 2009, 48, 1009–1018. [Google Scholar] [CrossRef]
- Shibata, A. Features of ocean microwave emission changed by wind at 6 GHz. J. Oceanogr. 2006, 62, 321–330. [Google Scholar] [CrossRef]
- Young, I. Seasonal variability of the global ocean wind and wave climate. Int. J. Climatol. A J. R. Meteorol. Soc. 1999, 19, 931–950. [Google Scholar] [CrossRef]
- Gentemann, C.L. Three way validation of MODIS and AMSR-E sea surface temperatures. J. Geophys. Res. Oceans 2014, 119, 2583–2598. [Google Scholar] [CrossRef]
- Prigent, C.; Aires, F.; Bernardo, F.; Orlhac, J.C.; Goutoule, J.M.; Roquet, H.; Donlon, C. Analysis of the potential and limitations of microwave radiometry for the retrieval of sea surface temperature: Definition of MICROWAT, a new mission concept. J. Geophys. Res. Oceans 2013, 118, 3074–3086. [Google Scholar] [CrossRef]
- Ribeiro, R.P.; Moniz, N. Imbalanced regression and extreme value prediction. Mach. Learn. 2020, 109, 1803–1835. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (GHz) | Resolution (km × km) | Polarization Mode | Incidence Angle | Swath Width |
|---|---|---|---|---|
| 6.9 | 62 × 35 | Horizontal and vertical polarization | 55° | 1450 km |
| 7.3 | 62 × 35 | |||
| 10.7 | 42 × 24 | |||
| 18.7 | 22 × 14 | |||
| 23.8 | 19 × 11 | |||
| 36.5 | 12 × 7 | |||
| 89.0 | 5 × 3 |
| Parameters | Model Settings | Parameters | Model Settings |
|---|---|---|---|
| Number of input layers | 17 | Dropout location | Between the hidden layer and the activation function |
| Number of output layers | 1 | Dropout loss ratio | 0.5 |
| Number of hidden layers | 15 | Learning rate | 0.1 attenuation to 0.00125 |
| Activation function | ReLU | Number of iterations | 1000 |
| Optimizer | Adam | Number of batch processes | 50 |
| Error Assessment Indicators | Retrieval Model | |||
|---|---|---|---|---|
| MLR | BP | SSA-BP | ISSA-BP | |
| RMSE (°C) | 1.6674 | 0.9882 | 0.8952 | 0.8268 |
| MAE (°C) | 1.1103 | 0.6623 | 0.6010 | 0.5801 |
| MAPE (%) | 30.2298 | 20.0492 | 18.7003 | 15.1603 |
| R2 | 0.9647 | 0.9882 | 0.9903 | 0.9918 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, C.; Ding, H. Optimizing Back-Propagation Neural Network to Retrieve Sea Surface Temperature Based on Improved Sparrow Search Algorithm. Remote Sens. 2023, 15, 5722. https://doi.org/10.3390/rs15245722
Ji C, Ding H. Optimizing Back-Propagation Neural Network to Retrieve Sea Surface Temperature Based on Improved Sparrow Search Algorithm. Remote Sensing. 2023; 15(24):5722. https://doi.org/10.3390/rs15245722
Chicago/Turabian StyleJi, Changming, and Haiyong Ding. 2023. "Optimizing Back-Propagation Neural Network to Retrieve Sea Surface Temperature Based on Improved Sparrow Search Algorithm" Remote Sensing 15, no. 24: 5722. https://doi.org/10.3390/rs15245722
APA StyleJi, C., & Ding, H. (2023). Optimizing Back-Propagation Neural Network to Retrieve Sea Surface Temperature Based on Improved Sparrow Search Algorithm. Remote Sensing, 15(24), 5722. https://doi.org/10.3390/rs15245722