
Unimodular Waveform Design for the DFRC System with Constrained Communication QoS



Abstract
:
1. Introduction
- We investigate two unimodular waveform design problems for DFRC systems with constrained communication QoS. In these models, we minimize the MSE of radar beampattern matching as the cost function, and then the MUI energy constraint and CI constraint are, respectively, formulated to ensure communication QoS. It is important to note that we propose a stricter per-user MUI energy constraint at each sampling moment, replacing the traditional MUI energy constraint. This modification allows the attainment of more accurate control of the communication performance of each user at each time index.
- We propose a novel ADMM-MM algorithm to efficiently address the complex non-convex problems that arise. Firstly, we consolidate all communication QoS constraints into a unified constraint. Next, we introduce an auxiliary variable and utilize the ADMM algorithm, decomposing the initial problem into two distinct subproblems. Finally, one subproblem can be efficiently solved using the MM algorithm, and the other can be swiftly solved by leveraging its geometric structure.
- Finally, the results of extensive simulation experiments demonstrate that the proposed algorithm outperforms the ADMM-based method [40] and exhibits superior computational efficiency. This validates the effectiveness and superiority of the proposed algorithm.
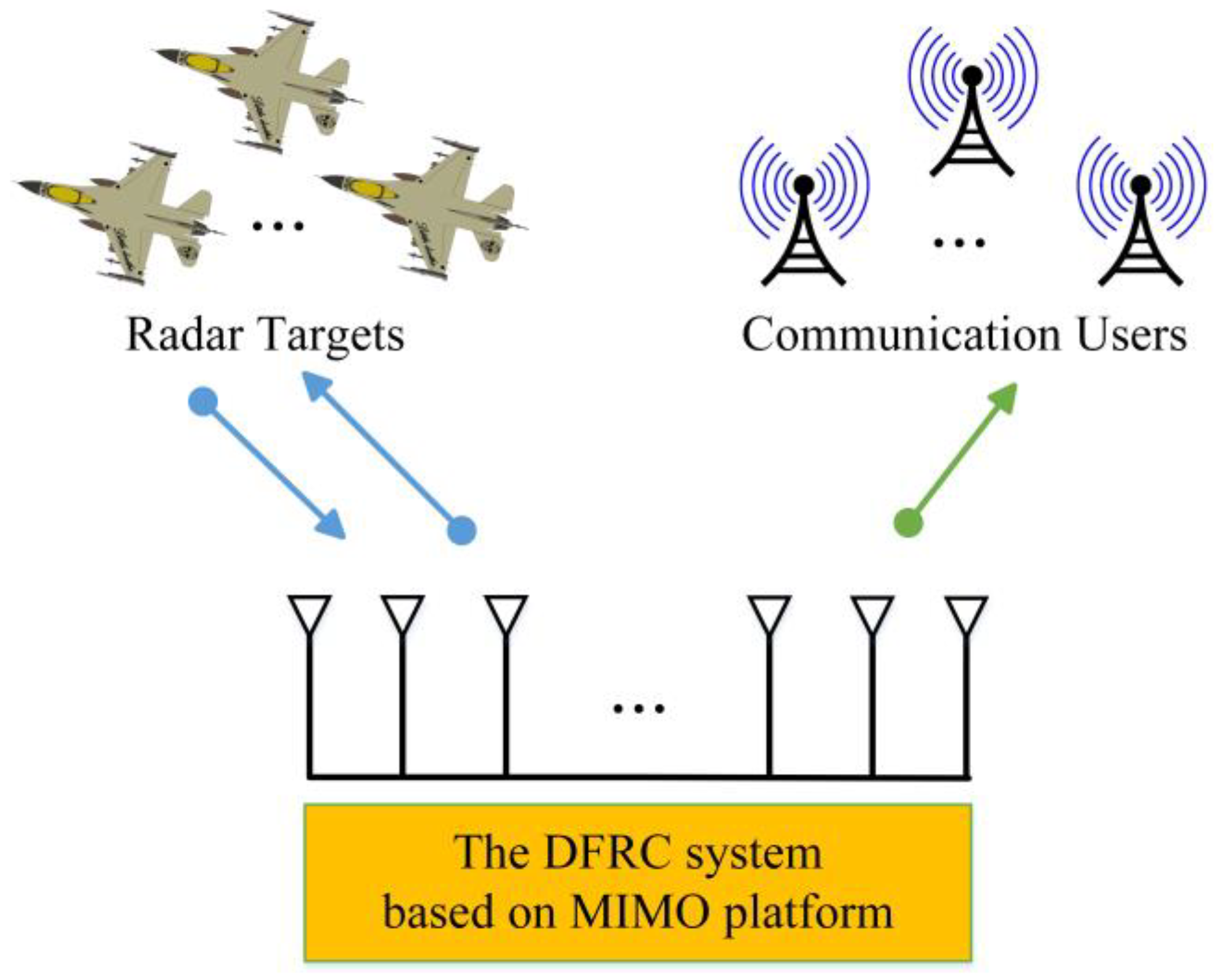
2. System Model and Problem Formulation
2.1. Radar Model
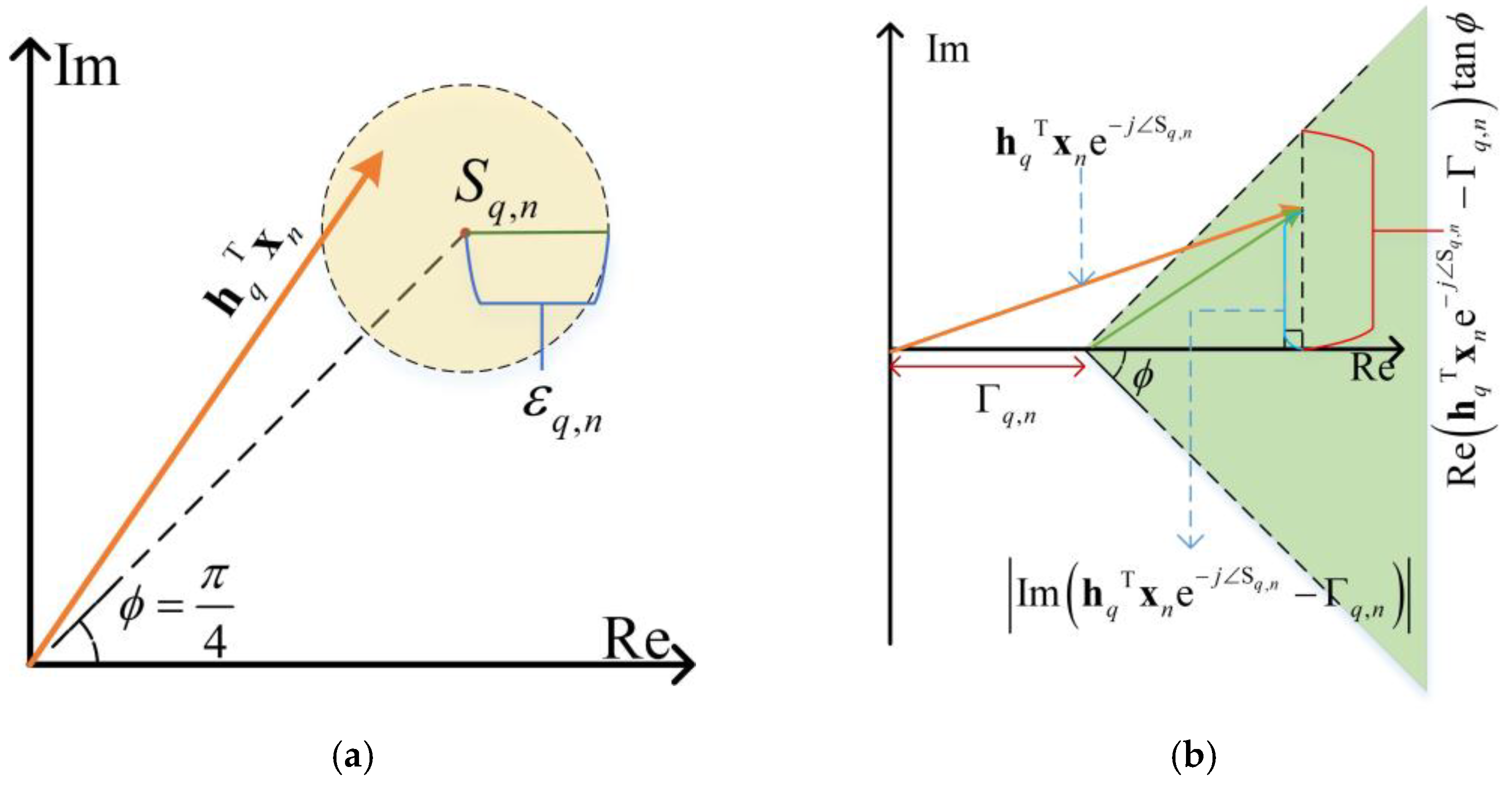
2.2. Communication QoS Constraints
2.3. Problem Formulation
3. Proposed Algorithm
3.1. Proposed ADMM-MM Algorithm for Solving
3.1.1. Solution to (26a)
3.1.2. Solution to (26b)
| Algorithm 1: Proposed ADMM-MM algorithm for solving | ||
| Input: , , , , , , , , , . Output: | ||
| 1 | Initialize: l = 0, , , . | |
| Repeat | ||
| // Update | ||
| 2 | Calculate and according to Appendix A and Equation (35). | |
| 3 | Derive according to Equation (34b). | |
| 4 | Derive according to Equation (36b). | |
| 5 | Compute by solving Equation (38). | |
| // Update and | ||
| 6 | Compute by solving Equation (41). | |
| 7 | Compute by solving Equation (26c). | |
| 8 | l = l + 1. | |
| Until the termination criteria (42) are met | ||
| 9 | ||
3.2. Proposed ADMM-MM Algorithm for
3.2.1. Solution to (45a)
3.2.2. Solution to (45b)
| Algorithm 2: Proposed ADMM-MM algorithm for solving | ||
| Input: , , , , , , , , , . Output: | ||
| 1 | Initialize: l = 0, , , . | |
| Repeat | ||
| // Update | ||
| 2 | Derive according to Equation (34b). | |
| 3 | Derive according to Equation (47b). | |
| 4 | Compute by solving Equation (49). | |
| // Update and | ||
| 5 | Compute by solving Equation (51). | |
| 6 | Compute by solving Equation (45c). | |
| 7 | l = l + 1. | |
| Until the termination criteria (52) are met | ||
| 8 | ||
3.3. Computational Complexity Analysis
4. Results
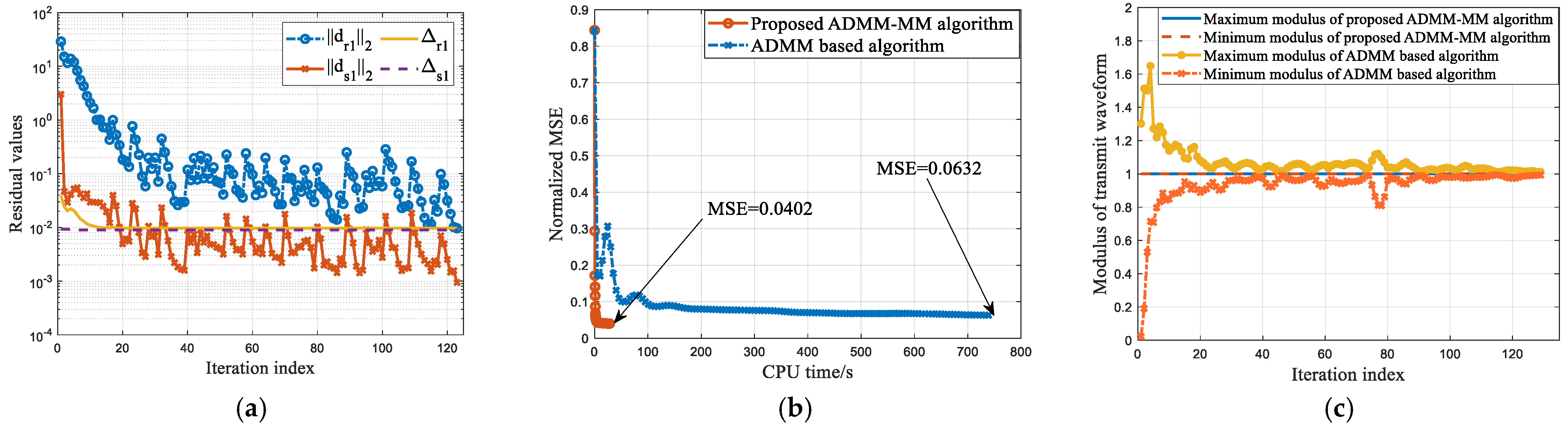
4.1. Effective Analysis of the Proposed Algorithm for Solving
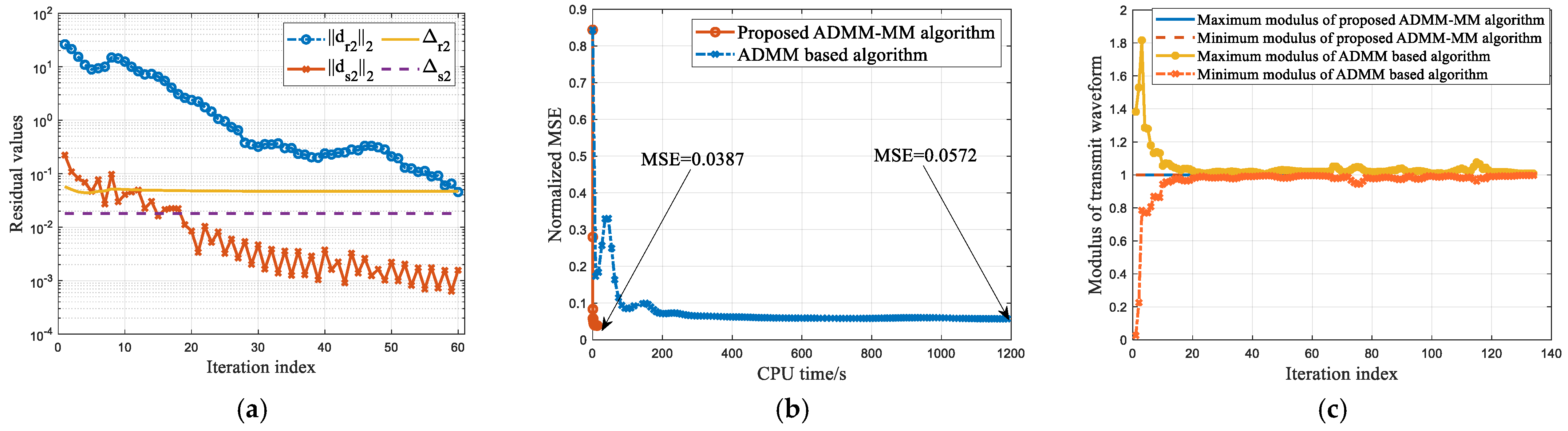
4.2. Effective Analysis of the Proposed Algorithm for Solving
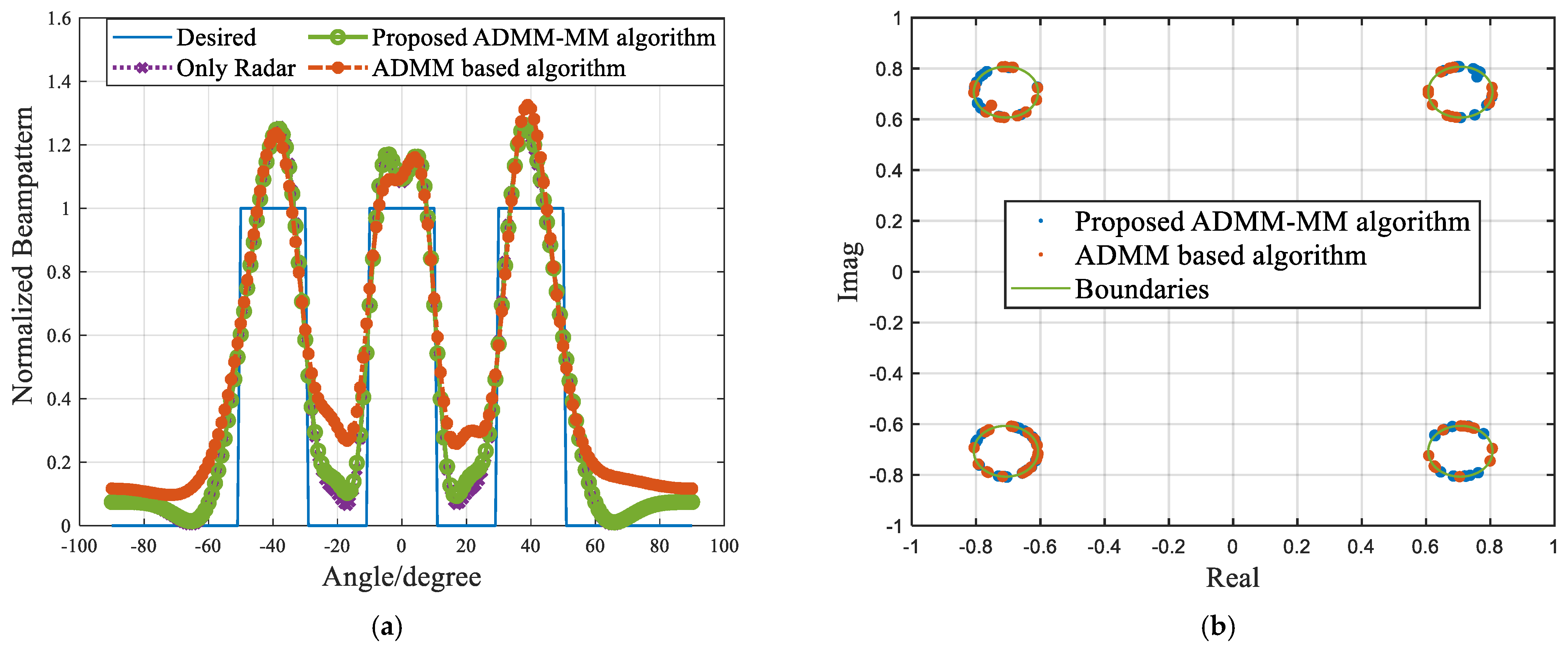
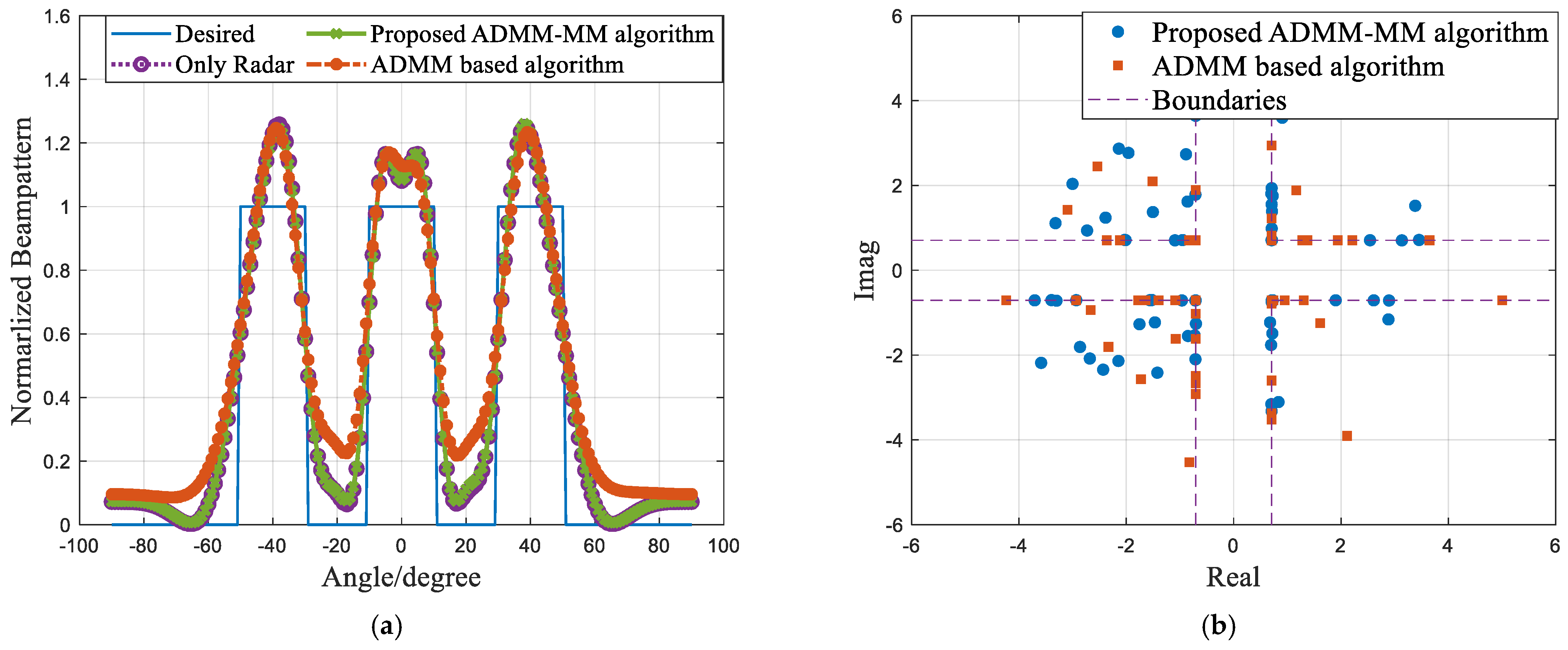
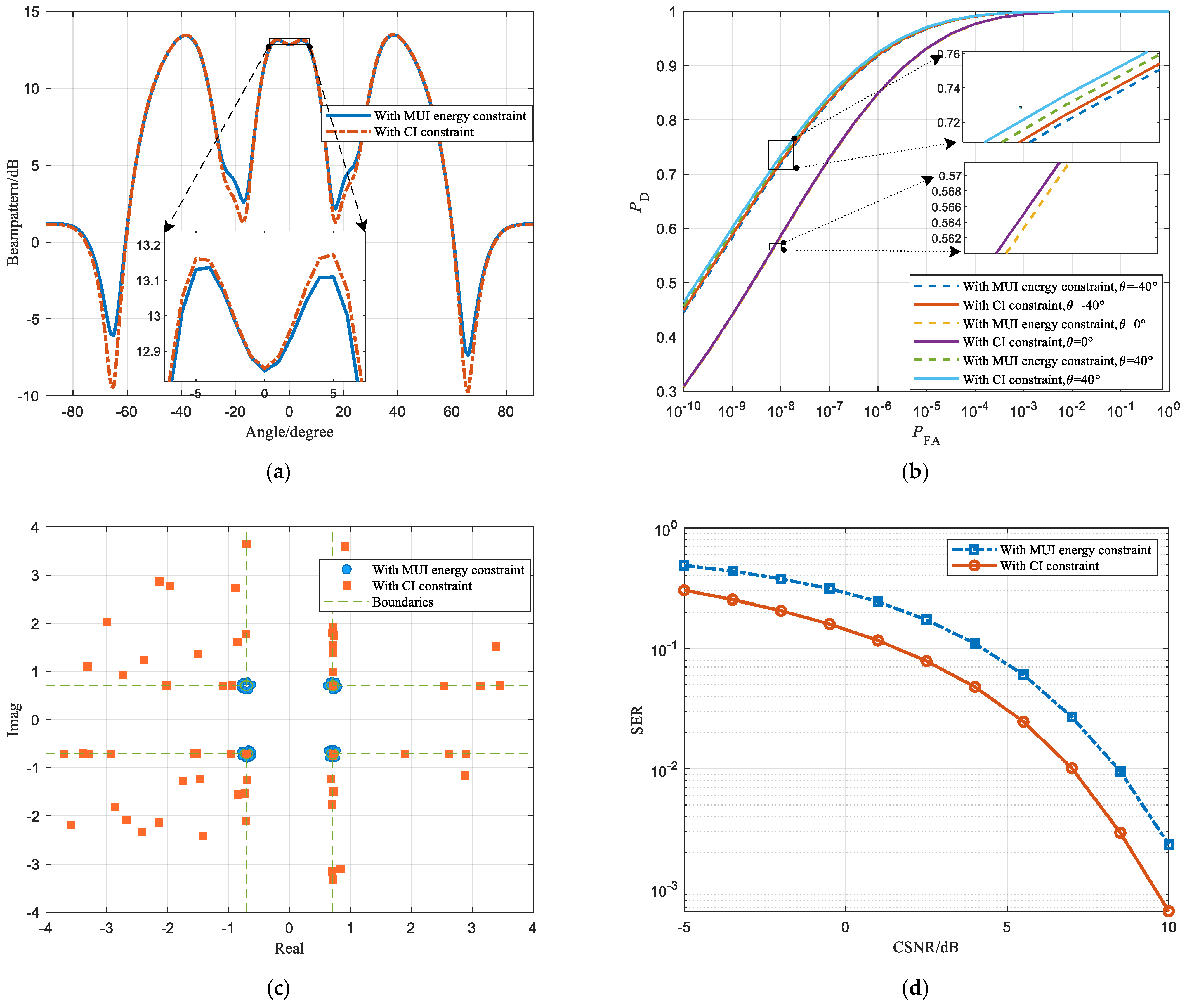
4.3. Performance Analysis
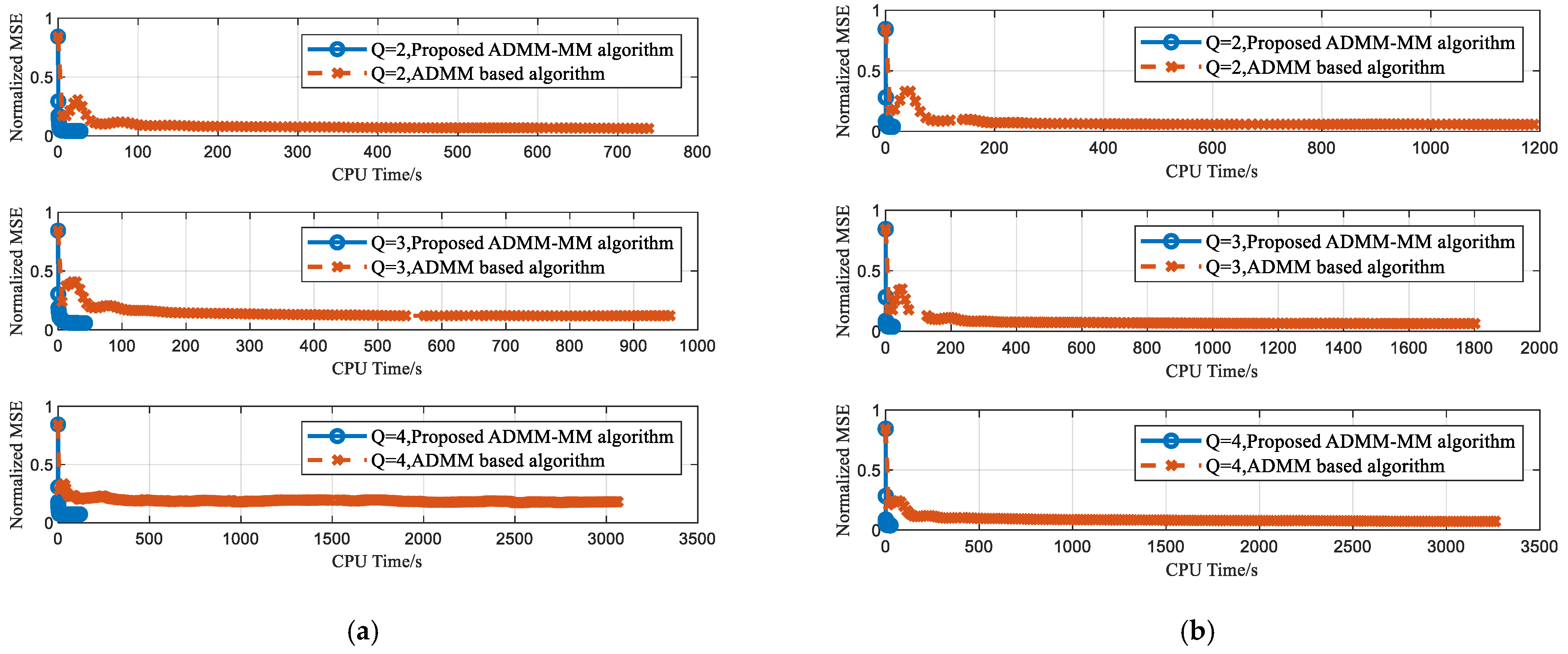
4.4. Computational Efficiency Comparison with the ADMM based Method in [40]
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Ali, A.; Zhu, Y.; Zakarya, M. Exploiting dynamic spatio-temporal correlations for citywide traffic flow prediction using attention based neural networks. Inf. Sci. 2021, 577, 852–870. [Google Scholar] [CrossRef]
- Ali, A.; Zhu, Y.; Zakarya, M. A data aggregation based approach to exploit dynamic spatio-temporal correlations for citywide crowd flows prediction in fog computing. Multimed. Tools Appl. 2021, 80, 31401–31433. [Google Scholar] [CrossRef]
- Ali, A.; Zhu, Y.; Zakarya, M. Exploiting dynamic spatio-temporal graph convolutional neural networks for citywide traffic flows prediction. Neural Netw. 2022, 145, 233–247. [Google Scholar] [CrossRef] [PubMed]
- Aubry, A.; Carotenuto, V.; De Maio, A.; Farina, A.; Pallotta, L. Optimization theory-based radar waveform design for spectrally dense environments. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 14–25. [Google Scholar] [CrossRef]
- Guo, B.; Liang, J.; Wang, G.; Tang, B.; So, H.C. Bistatic MIMO DFRC System Waveform Design via Fractional Programming. IEEE Trans. Signal Process. 2023, 71, 1952–1967. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C.; Petropulu, A.P.; Griffiths, H.; Hanzo, L. Joint radar and communication design: Applications, state-of-the-art, and the road ahead. IEEE Trans. Commun. 2020, 68, 3834–3862. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, Z.; Tong, F.; Sun, P.; Feng, X.; Zhao, Z. Joint Design of Transmitting Waveform and Receiving Filter via Novel Riemannian Idea for DFRC System. Remote Sens. 2023, 15, 3548. [Google Scholar] [CrossRef]
- Huang, C.; Huang, Z.; Zhou, Q.; Zhang, J.; Yang, Z.; Zhang, K. Unimodular waveform design for integrated radar communication and jamming. Digit. Signal Process. 2023, 143. [Google Scholar] [CrossRef]
- Yang, R.; Jiang, H.; Qu, L. Waveform Design for MIMO Dual-Functional Radar-Communication System Using MUI Energy Minimization With PAPR and CRB Constraints. IEEE Commun. Lett. 2023, 27, 1417–1421. [Google Scholar] [CrossRef]
- Li, H.; Liu, Y.; Liao, G.; Chen, Y. Joint Radar and Communications Waveform Design Based on Complementary Sequence Sets. Remote Sens. 2023, 15, 645. [Google Scholar] [CrossRef]
- Zhang, J.A.; Liu, F.; Masouros, C.; Heath, R.W.; Feng, Z.; Zheng, L.; Petropulu, A. An overview of signal processing techniques for joint communication and radar sensing. IEEE J. Sel. Top. Signal Process. 2021, 15, 1295–1315. [Google Scholar] [CrossRef]
- Euziere, J.; Guinvarc’h, R.; Lesturgie, M.; Uguen, B.; Gillard, R. Dual Function Radar Communication Time-Modulated Array. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–4. [Google Scholar]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. Dual-function radar-communications: Information embedding using sidelobe control and waveform diversity. IEEE Trans. Signal Process. 2015, 64, 2168–2181. [Google Scholar] [CrossRef]
- BouDaher, E.; Hassanien, A.; Aboutanios, E.; Amin, M.G. Towards a Dual-Function MIMO Radar-Communication System. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. Signaling strategies for dual-function radar communications: An overview. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 36–45. [Google Scholar] [CrossRef]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. Phase-modulation based dual-function radar-communications. IET Radar Sonar Navig. 2016, 10, 1411–1421. [Google Scholar] [CrossRef]
- Ahmed, A.; Zhang, Y.D.; Gu, Y. Dual-function radar-communications using QAM-based sidelobe modulation. Digit. Signal Process. 2018, 82, 166–174. [Google Scholar] [CrossRef]
- Wu, W.; Cao, Y.; Wang, S.; Yeo, T.; Wang, M. MIMO waveform design combined with constellation mapping for the integrated system of radar and communication. Signal Process. 2020, 170, 107443. [Google Scholar] [CrossRef]
- Hassanien, A.; Aboutanios, E.; Amin, M.G.; Fabrizio, G.A. A dual-function MIMO radar-communication system via waveform permutation. Digit. Signal Process. 2018, 83, 118–128. [Google Scholar] [CrossRef]
- Wang, X.; Hassanien, A.; Amin, M.G. Dual-function MIMO radar communications system design via sparse array optimization. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1213–1226. [Google Scholar] [CrossRef]
- Ma, D.; Shlezinger, N.; Huang, T.; Liu, Y.; Eldar, Y.C. FRaC: FMCW-based joint radar-communications system via index modulation. IEEE J. Sel. Top. Signal Process. 2021, 15, 1348–1364. [Google Scholar] [CrossRef]
- Huang, T.; Shlezinger, N.; Xu, X.; Liu, Y.; Eldar, Y.C.J. MAJoRCom: A dual-function radar communication system using index modulation. IEEE Trans. Signal Process. 2020, 68, 3423–3438. [Google Scholar] [CrossRef]
- Baxter, W.; Aboutanios, E.; Hassanien, A. Joint radar and communications for frequency-hopped MIMO systems. IEEE Trans. Signal Process. 2022, 70, 729–742. [Google Scholar] [CrossRef]
- Xu, J.; Wang, X.; Aboutanios, E.; Cui, G. Hybrid index modulation for dual-functional radar communications systems. IEEE Trans. Veh. Technol. 2022, 72, 3186–3200. [Google Scholar] [CrossRef]
- Wu, K.; Zhang, J.A.; Huang, X.; Guo, Y.J. Frequency-hopping MIMO radar-based communications: An overview. IEEE Aerosp. Electron. Syst. Mag. 2021, 37, 42–54. [Google Scholar] [CrossRef]
- Liu, Y.; Liao, G.; Chen, Y.; Xu, J.; Yin, Y. Super-resolution range and velocity estimations with OFDM integrated radar and communications waveform. IEEE Trans. Veh. Technol. 2020, 69, 11659–11672. [Google Scholar] [CrossRef]
- Liyanaarachchi, S.D.; Riihonen, T.; Barneto, C.B.; Valkama, M. Optimized waveforms for 5G–6G communication with sensing: Theory, simulations and experiments. IEEE Trans. Wirel. Commun. 2021, 20, 8301–8315. [Google Scholar] [CrossRef]
- Liu, Y.; Liao, G.; Yang, Z. Robust OFDM integrated radar and communications waveform design based on information theory. Signal Process. 2019, 162, 317–329. [Google Scholar] [CrossRef]
- Sit, Y.L.; Nuss, B.; Zwick, T. On mutual interference cancellation in a MIMO OFDM multiuser radar-communication network. IEEE Trans. Veh. Technol. 2018, 67, 3339–3348. [Google Scholar] [CrossRef]
- Rong, J.; Liu, F.; Miao, Y. Integrated Radar and Communications Waveform Design Based on Multi-Symbol OFDM. Remote Sens. 2022, 14, 4705. [Google Scholar] [CrossRef]
- Liu, F.; Zhou, L.; Masouros, C.; Li, A.; Luo, W.; Petropulu, A. Toward Dual-Functional Radar-Communication Systems: Optimal Waveform Design. IEEE Trans. Signal Process. 2018, 66, 4264–4279. [Google Scholar] [CrossRef]
- Shi, S.; Wang, Z.; He, Z.; Cheng, Z. Constrained Waveform Design for Dual-Functional MIMO Radar-Communication System. Signal Process. 2020, 171, 107530. [Google Scholar] [CrossRef]
- Huang, Z.; Tang, B.; Huang, C.; Qin, L. Direct Transmit Waveform Design to Match a Desired Beampattern under the Constant Modulus Constraint. Digit. Signal Process. 2022, 126, 103486. [Google Scholar] [CrossRef]
- Jiang, M.; Liao, G.; Yang, Z.; Liu, Y.; Chen, Y. Integrated Radar and Communication Waveform Design Based on a Shared Array. Signal Process. 2021, 182, 107956. [Google Scholar] [CrossRef]
- Wang, B.; Wu, L.; Cheng, Z.; He, Z. Exploiting Constructive Interference in Symbol Level Hybrid Beamforming for Dual-Function Radar-Communication System. IEEE Wirel. Commun. Lett. 2022, 11, 2071–2075. [Google Scholar] [CrossRef]
- Zhang, Z.; Chang, Q.; Liu, F.; Yang, S. Dual-functional radar-communication waveform design: Interference reduction versus exploitation. IEEE Commun. Lett. 2021, 26, 148–152. [Google Scholar] [CrossRef]
- Su, N.; Liu, F.; Wei, Z.; Liu, Y.-F.; Masouros, C. Secure dual-functional radar-communication transmission: Exploiting interference for resilience against target eavesdropping. IEEE Trans. Wirel. Commun. 2022, 21, 7238–7252. [Google Scholar] [CrossRef]
- Liu, R.; Li, M.; Liu, Q.; Swindlehurst, A.L. Joint Waveform and Filter Designs for STAP-SLP-Based MIMO-DFRC Systems. IEEE J. Sel. Areas Commun. 2022, 40, 1918–1931. [Google Scholar] [CrossRef]
- Liu, R.; Li, M.; Liu, Q.; Swindlehurst, A.L. Dual-Functional Radar-Communication Waveform Design: A Symbol-Level Precoding Approach. IEEE J. Sel. Top. Signal Process. 2021, 15, 1316–1331. [Google Scholar] [CrossRef]
- Zhang, T.; Zhao, Y.; Liu, D.; Chen, J. Interference Optimized Dual-Functional Radar-Communication Waveform Design with Low PAPR and Range Sidelobe. Signal Process. 2023, 204, 108828. [Google Scholar] [CrossRef]
- Zhu, J.; Song, Y.; Jiang, N.; Xie, Z.; Fan, C.; Huang, X. Enhanced Doppler Resolution and Sidelobe Suppression Performance for Golay Complementary Waveforms. Remote Sens. 2023, 15, 2452. [Google Scholar] [CrossRef]
- Cheng, Z.; He, Z.; Zhang, S.; Li, J. Constant Modulus Waveform Design for MIMO Radar Transmit Beampattern. IEEE Trans. Signal Process. 2017, 65, 4912–4923. [Google Scholar] [CrossRef]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Computation | Complexity | |
|---|---|---|
| Update | ||
| Update | ||
| Update | ||
| Total | ||
| Computation | Complexity | |
|---|---|---|
| Update | ||
| Update | ||
| Update | ||
| Total | ||
| Proposed ADMM-MM Method | ADMM based Method [40] | ||
|---|---|---|---|
| MSE/Runtime (s) | MSE/Runtime (s) | ||
| Solving | , | 0.1220/12.21 | 0.2450/395.06 |
| , | 0.0402/28.09 | 0.0632/738.74 | |
| , | 0.0200/61.84 | 0.0362/1202.51 | |
| , | 0.0578/40.20 | 0.1208/956.67 | |
| , | 0.0724/120.10 | 0.1794/3063.91 | |
| Solving | , | 0.0519/5.95 | 0.1121/756.49 |
| , | 0.0387/13.15 | 0.0572/1189.18 | |
| , | 0.0191/20.39 | 0.0278/1741.21 | |
| , | 0.0394/21.93 | 0.0637/1801.28 | |
| , | 0.0397/25.72 | 0.0718/3261.77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Zhou, Q.; Huang, Z.; Li, Z.; Xu, Y.; Zhang, J. Unimodular Waveform Design for the DFRC System with Constrained Communication QoS. Remote Sens. 2023, 15, 5350. https://doi.org/10.3390/rs15225350
Huang C, Zhou Q, Huang Z, Li Z, Xu Y, Zhang J. Unimodular Waveform Design for the DFRC System with Constrained Communication QoS. Remote Sensing. 2023; 15(22):5350. https://doi.org/10.3390/rs15225350
Chicago/Turabian StyleHuang, Chao, Qingsong Zhou, Zhongrui Huang, Zhihui Li, Yibo Xu, and Jianyun Zhang. 2023. "Unimodular Waveform Design for the DFRC System with Constrained Communication QoS" Remote Sensing 15, no. 22: 5350. https://doi.org/10.3390/rs15225350
APA StyleHuang, C., Zhou, Q., Huang, Z., Li, Z., Xu, Y., & Zhang, J. (2023). Unimodular Waveform Design for the DFRC System with Constrained Communication QoS. Remote Sensing, 15(22), 5350. https://doi.org/10.3390/rs15225350