
Spatio-Temporal Alignment and Track-To-Velocity Module for Tropical Cyclone Forecast


Abstract
:1. Introduction
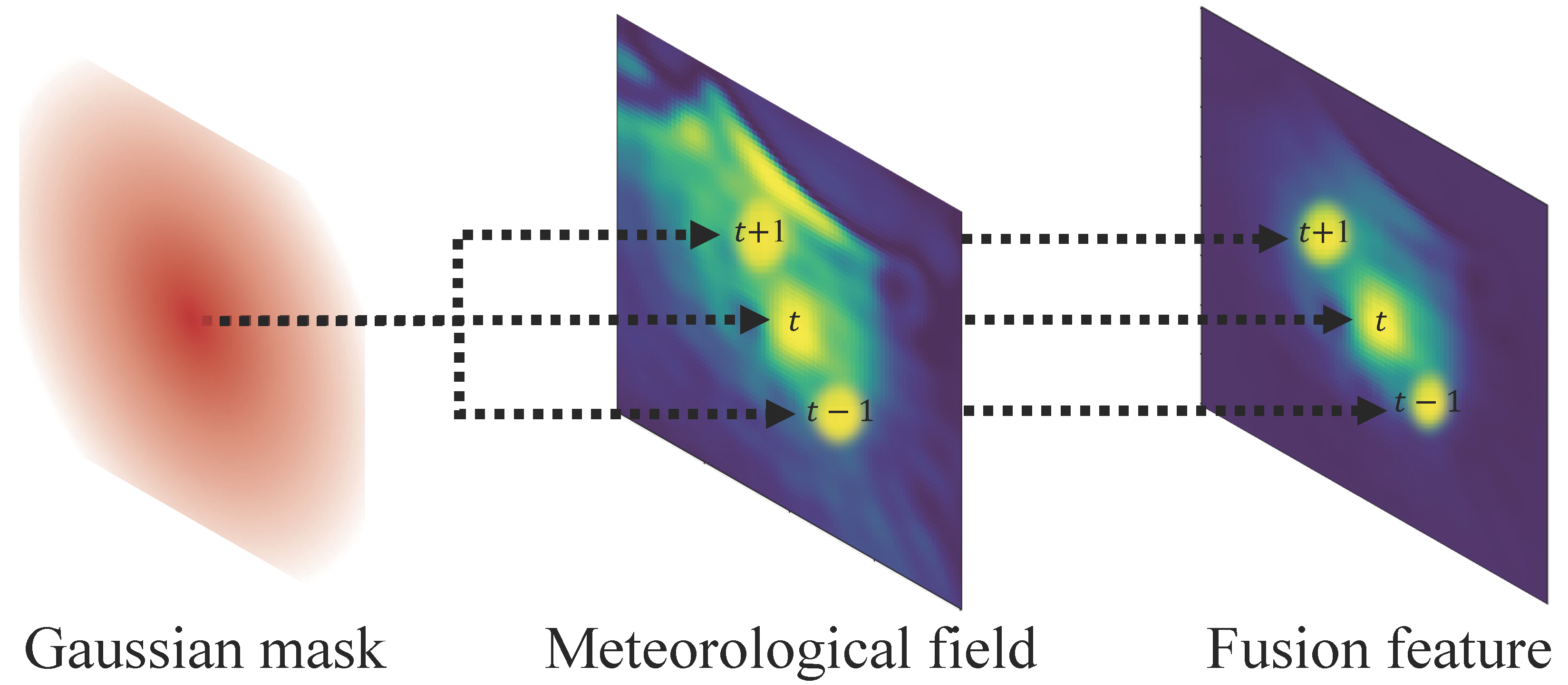
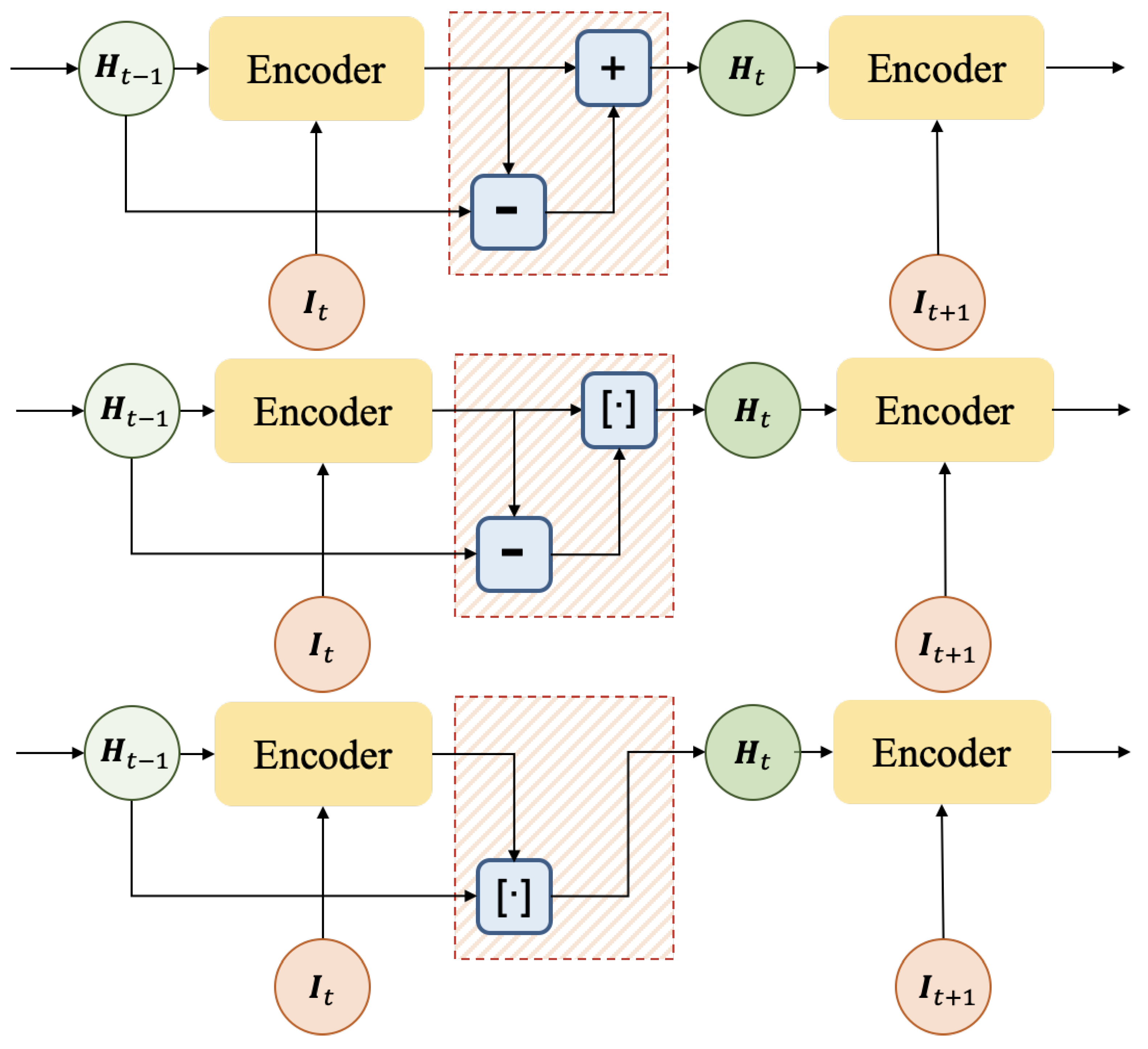
- For better feature alignment and fusion, we design a Spatial Alignment Feature Fusion (SAFF) module that preserves spatial correspondence. This fusion method can ensure that the location and the field are aligned in the spatio-temporal dimension, which is more reasonable than the existing connection methods.
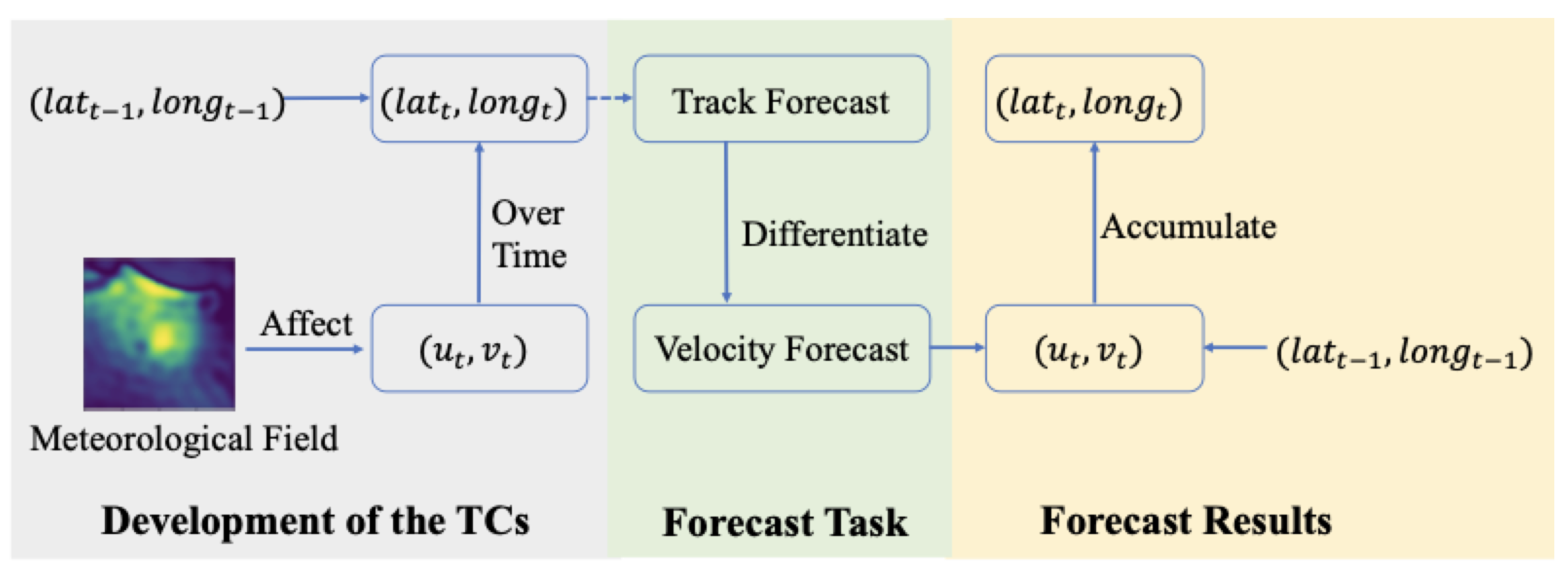
- For better forecast accuracies, we propose a Track-to-Velocity (T2V) module. We convert the track forecast into a velocity forecast. Such conversion can reduce the prediction difficulty and improve the prediction accuracy.
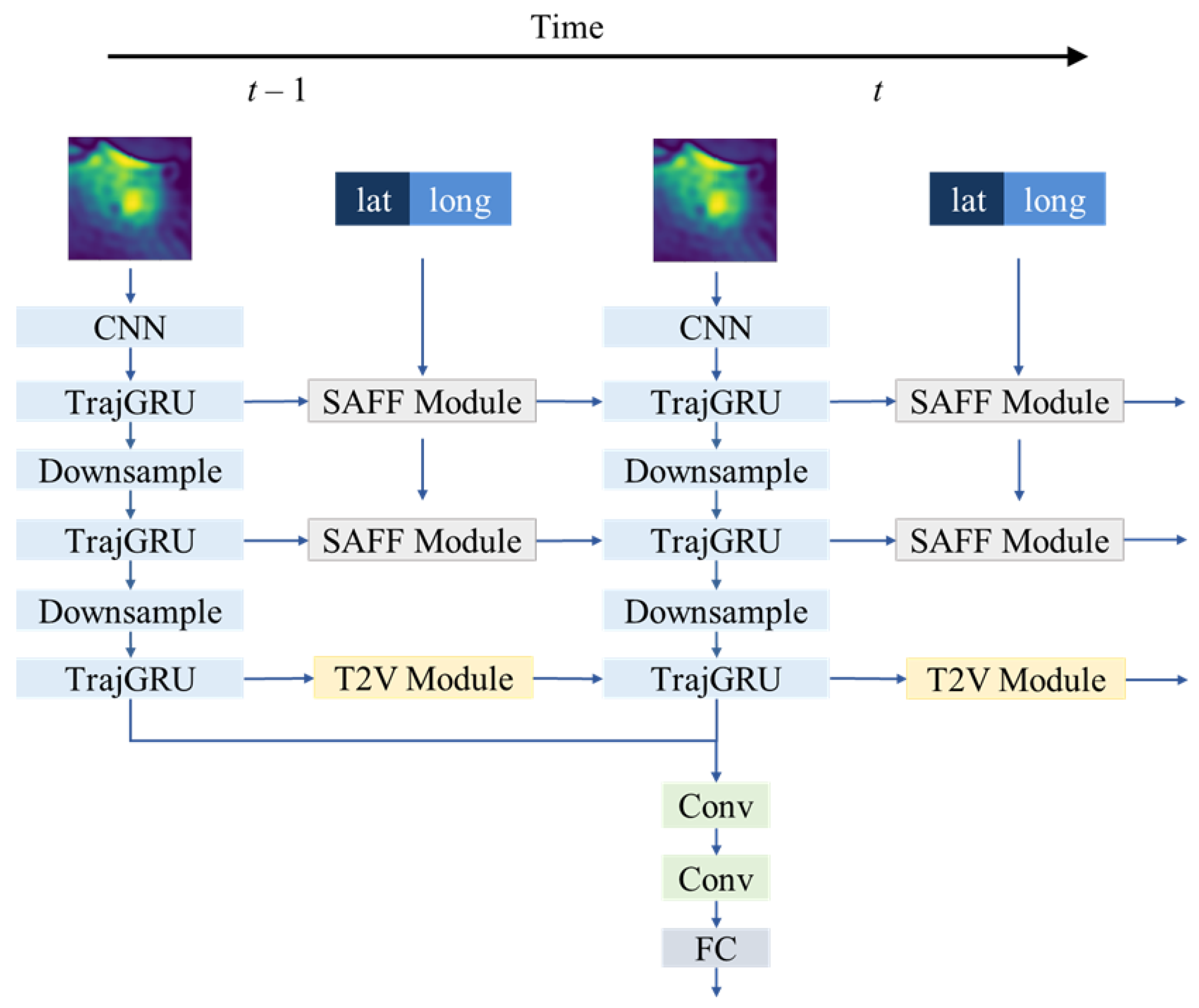
- We propose an overall framework, TC-TrajGRU, based on the SAFF and T2V modules. It presents accurate and robust forecast results. Our forecast accuracy is competitive with the NWP method in the 12 h forecast task.
2. Methodology
2.1. Spatial Alignment Feature Fusion Module
2.2. Track-to-Velocity Module
2.3. Overall Structure of TC-TrajGRU
3. Experiments
3.1. Dataset
3.1.1. The Track of TCs
3.1.2. The Sea Level Pressure Field
3.2. Metrics
3.3. Experiment Setting and Training Details
3.4. Network Details
3.5. Comparison Experiments
3.6. Evaluation of Directional Forecast Stability
3.7. Annual Comparison with Official Track Forecast
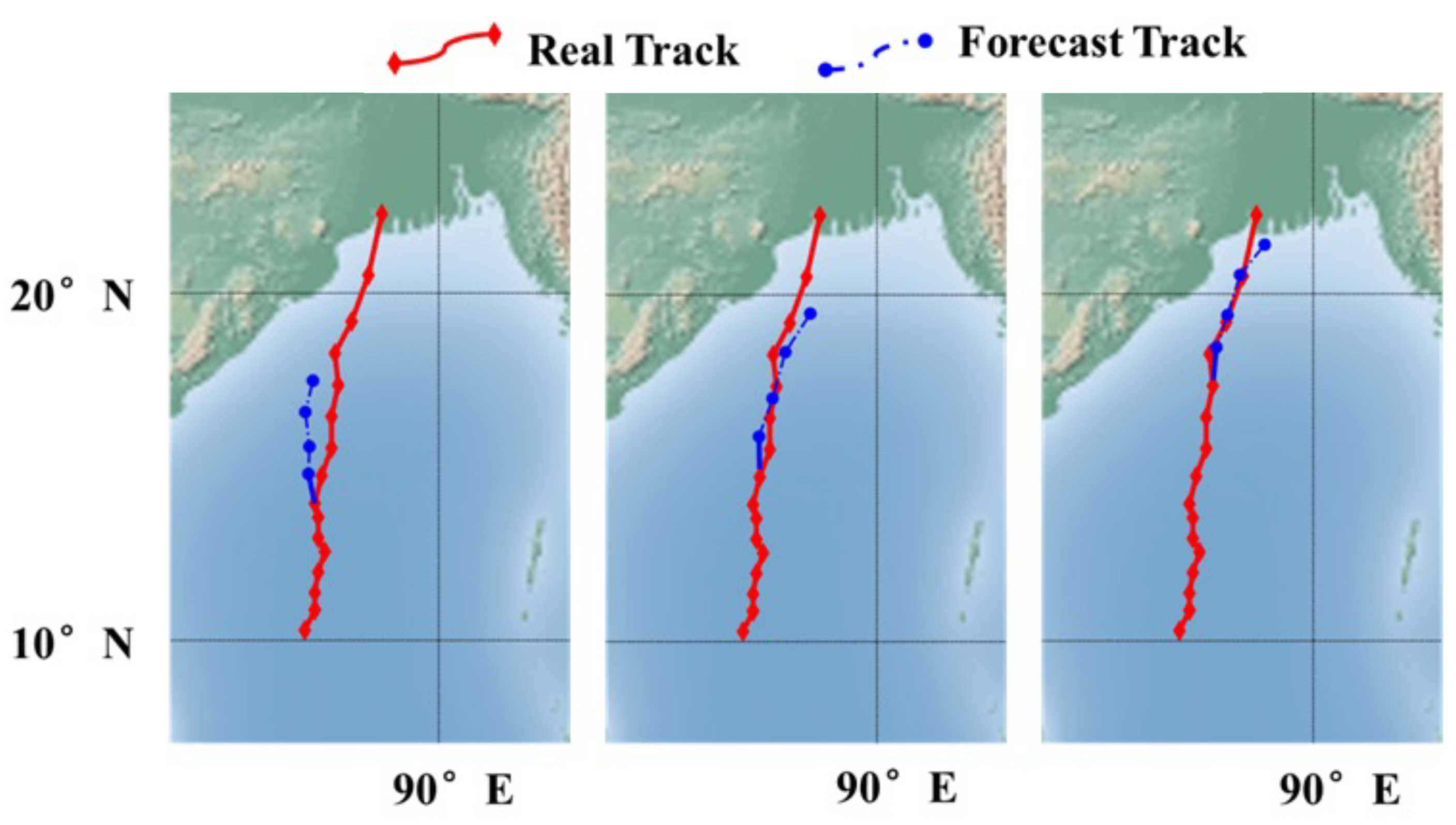
3.8. Forecast Examples
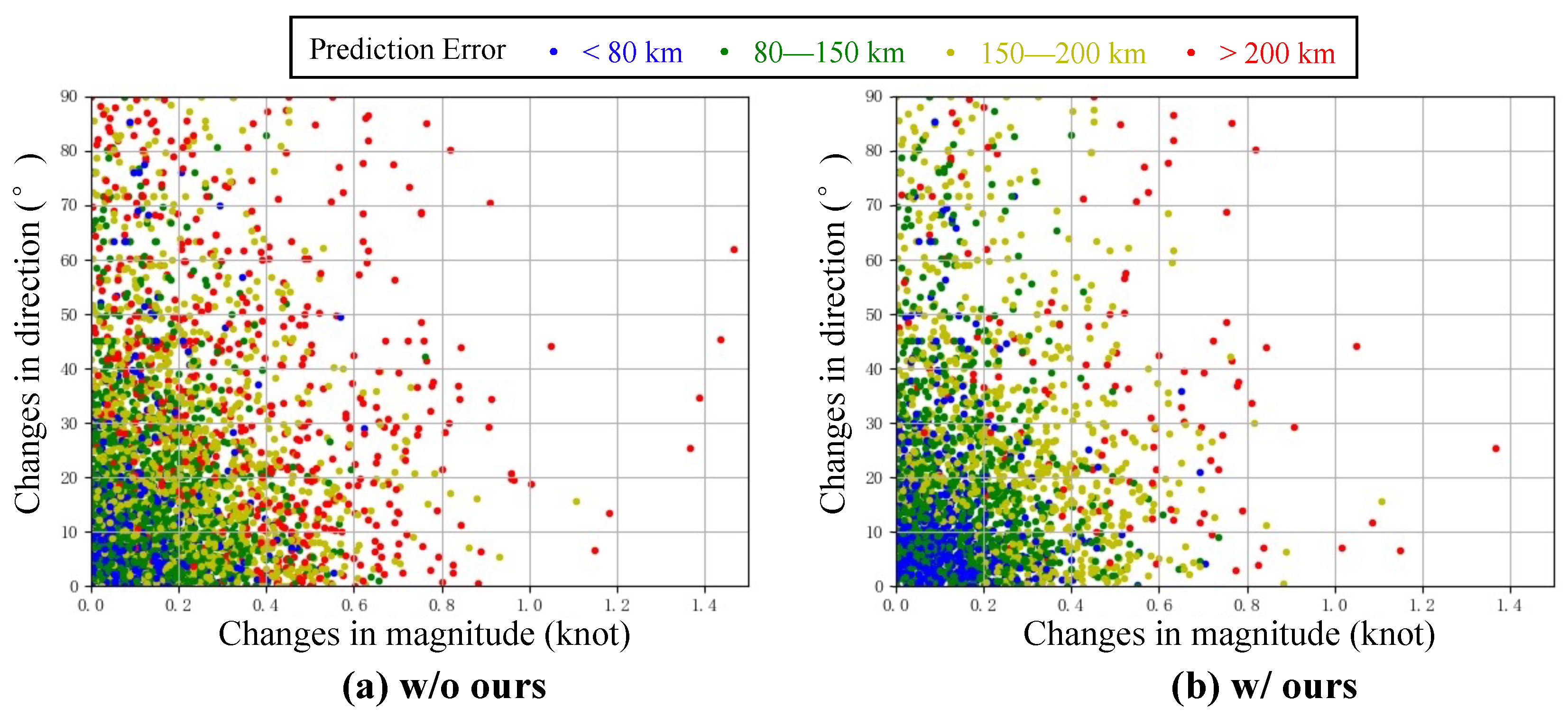
3.9. Prediction Errors
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pickle, J.D. Forecasting Short-Term Movement and Intensification of Tropical Cyclones Using Pattern-Recognition Techniques; Phillips Laboratory, Directorate of Geophysics, Air Force Systems Command: Chestertown, MD, USA, 1991. [Google Scholar]
- Ali, M.M.; Kishtawal, C.M.; Jain, S. Predicting cyclone tracks in the north Indian Ocean: An artificial neural network approach. Geophys. Res. Lett. 2007, 34, 4. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, W.; Fu, W. Back Propogation(BP)-neural network for tropical cyclone track forecast. In Proceedings of the 2011 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011; pp. 1–4. [Google Scholar]
- Kordmahalleh, M.M.; Sefidmazgi, M.G.; Homaifar, A. A Sparse Recurrent Neural Network for Trajectory Prediction of Atlantic Hurricanes. In Proceedings of the Genetic Evolutionary Computation Conference, Denver, CO, USA, 20–24 July 2016. [Google Scholar]
- Alemany, S.; Beltran, J.; Pérez, A.; Ganzfried, S. Predicting Hurricane Trajectories using a Recurrent Neural Network. In Proceedings of the Association for the Advancement of Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019. [Google Scholar]
- Gao, S.; Zhao, P.; Pan, B.; Li, Y.; Zhou, M.; Xu, J.; Zhong, S.; Shi, Z.X. A nowcasting model for the prediction of typhoon tracks based on a long short term memory neural network. Acta Oceanol. Sin. 2018, 37, 8–12. [Google Scholar] [CrossRef]
- Song, T.; Li, Y.; Meng, F.; Xie, P.; Xu, D. A Novel Deep Learning Model by BiGRU with Attention Mechanism for Tropical Cyclone Track Prediction in Northwest Pacific. J. Appl. Meteorol. Climatol. 2022, 61, 3–12. [Google Scholar] [CrossRef]
- Mudigonda, M.; Kim, S.; Mahesh, A.; Kahou, S.E.; Kashinath, K.; Williams, D.N.; Michalski, V.; O’Brien, T.; Prabhat, M. Segmenting and Tracking Extreme Climate Events using Neural Networks. Deep Learning for Physical Sciences Workshop. In Proceedings of the NIPS Conference, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Kim, S.; Kim, H.; Lee, J.; Yoon, S.; Kahou, S.E.; Kashinath, K.; Prabhat. Deep-Hurricane-Tracker: Tracking and Forecasting Extreme Climate Events. In Proceedings of the 2019 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 7–11 January 2019; pp. 1761–1769. [Google Scholar]
- Giffard-Roisin, S.; Yang, M.; Charpiat, G.; Kumler-Bonfanti, C.; K’egl, B.; Monteleoni, C. Tropical Cyclone Track Forecasting Using Fused Deep Learning from Aligned Reanalysis Data. Front. Big Data 2020, 3, 1. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Chun Woo, W. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. In Proceedings of the Advances in Neural Information Processing Systems, Montréal, QC, Canada, 7–12 December 2015. [Google Scholar]
- Liu, Z.; Hao, K.; Geng, X.; Zou, Z.; Shi, Z. Dual-Branched Spatio-Temporal Fusion Network for Multihorizon Tropical Cyclone Track Forecast. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 3842–3852. [Google Scholar] [CrossRef]
- Bi, K.; Xie, L.; Zhang, H.; Chen, X.; Gu, X.; Tian, Q. Accurate medium-range global weather forecasting with 3D neural networks. Nature 2023, 619, 533–538. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Han, T.; Gong, J.; Bai, L.; Ling, F.; Luo, J.J.; Chen, X.; Ma, L.; Zhang, T.; Su, R.; et al. FengWu: Pushing the Skillful Global Medium-range Weather Forecast beyond 10 Days Lead. arXiv 2023, arXiv:2304.02948. [Google Scholar]
- Shi, X.; Gao, Z.; Lausen, L.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Deep Learning for Precipitation Nowcasting: A Benchmark and A New Model. arXiv 2017, arXiv:1706.03458. [Google Scholar]
- Andle, J.; Soucy, N.; Socolow, S.; Sekeh, S.Y. The Stanford Drone Dataset Is More Complex Than We Think: An Analysis of Key Characteristics. IEEE Trans. Intell. Veh. 2023, 8, 1863–1873. [Google Scholar] [CrossRef]
- Mundhenk, T.N.; Konjevod, G.; Sakla, W.A.; Boakye, K. A Large Contextual Dataset for Classification, Detection and Counting of Cars with Deep Learning. In Proceedings of the Computer Vision—ECCV 2016—14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; Volume 9907, pp. 785–800. [Google Scholar] [CrossRef]
- Lam, D.; Kuzma, R.; McGee, K.; Dooley, S.; Laielli, M.; Klaric, M.; Bulatov, Y.; McCord, B. xView: Objects in Context in Overhead Imagery. arXiv 2018, arXiv:1802.07856. [1802.07856]. [Google Scholar]
- Weinstein, B.G.; Marconi, S.; Bohlman, S.A.; Zare, A.; Singh, A.; Graves, S.J.; White, E.P. A remote sensing derived data set of 100 million individual tree crowns for the National Ecological Observatory Network. eLife 2021, 10, e62922. [Google Scholar] [CrossRef] [PubMed]
- Gasienica-Józkowy, J.; Knapik, M.; Cyganek, B. An ensemble deep learning method with optimized weights for drone-based water rescue and surveillance. Integr. Comput. Aided Eng. 2021, 28, 221–235. [Google Scholar] [CrossRef]
- Rahnemoonfar, M.; Chowdhury, T.; Sarkar, A.; Varshney, D.; Yari, M.; Murphy, R.R. FloodNet: A High Resolution Aerial Imagery Dataset for Post Flood Scene Understanding. IEEE Access 2021, 9, 89644–89654. [Google Scholar] [CrossRef]
- Wang, J.; Zheng, Z.; Ma, A.; Lu, X.; Zhong, Y. LoveDA: A Remote Sensing Land-Cover Dataset for Domain Adaptive Semantic Segmentation. In Proceedings of the Neural Information Processing Systems Track on Datasets and Benchmarks 1, NeurIPS Datasets and Benchmarks, Online, 21 August 2021. [Google Scholar]
- Castillo-Navarro, J.; Saux, B.L.; Boulch, A.; Audebert, N.; Lefèvre, S. Semi-supervised semantic segmentation in Earth Observation: The MiniFrance suite, dataset analysis and multi-task network study. Mach. Learn. 2022, 111, 3125–3160. [Google Scholar] [CrossRef]
- Azimi, S.M.; Henry, C.; Sommer, L.; Schumann, A.; Vig, E. SkyScapes—Fine-Grained Semantic Understanding of Aerial Scenes. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, ICCV, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 7392–7402. [Google Scholar] [CrossRef]
- Baetens, L.; Desjardins, C.; Hagolle, O. Validation of Copernicus Sentinel-2 Cloud Masks Obtained from MAJA, Sen2Cor, and FMask Processors Using Reference Cloud Masks Generated with a Supervised Active Learning Procedure. Remote Sens. 2019, 11, 433. [Google Scholar] [CrossRef]
- Garnot, V.S.F.; Landrieu, L. Panoptic Segmentation of Satellite Image Time Series with Convolutional Temporal Attention Networks. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision, ICCV 2021, Montreal, QC, Canada, 10–17 October 2021; pp. 4852–4861. [Google Scholar] [CrossRef]
- Shermeyer, J.; Hossler, T.; Etten, A.V.; Hogan, D.; Lewis, R.; Kim, D. RarePlanes: Synthetic Data Takes Flight. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, WACV 2021, Waikoloa, HI, USA, 3–8 January 2021; pp. 207–217. [Google Scholar] [CrossRef]
- Chiu, M.T.; Xu, X.; Wei, Y.; Huang, Z.; Schwing, A.G.; Brunner, R.; Khachatrian, H.; Karapetyan, H.; Dozier, I.; Rose, G.; et al. Agriculture-Vision: A Large Aerial Image Database for Agricultural Pattern Analysis. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020; pp. 2825–2835. [Google Scholar] [CrossRef]
- Zamir, S.W.; Arora, A.; Gupta, A.; Khan, S.H.; Sun, G.; Khan, F.S.; Zhu, F.; Shao, L.; Xia, G.; Bai, X. iSAID: A Large-scale Dataset for Instance Segmentation in Aerial Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, CVPR Workshops 2019, Long Beach, CA, USA, 16–20 June 2019; pp. 28–37. [Google Scholar]
- Gupta, R.; Goodman, B.; Patel, N.; Hosfelt, R.; Sajeev, S.; Heim, E.; Doshi, J.; Lucas, K.; Choset, H.; Gaston, M. Creating xBD: A Dataset for Assessing Building Damage from Satellite Imagery. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Chu, J.H.; Levine, A.D.S. North Indian Ocean Best Track Data. Available online: https://www.metoc.navy.mil/jtwc/jtwc.html?north-indian-ocean (accessed on 25 June 2023).
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Saha, S.; Moorthi, S.; Pan, H.L.; Wu, X.; Wang, J.; Nadiga, S.; Tripp, P.; Kistler, R.; Woollen, J.; Behringer, D.; et al. The NCEP Climate Forecast System Reanalysis. Bull. Am. Meteorol. Soc. 2010, 91, 1015–1057. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Mohapatra, M.; Sharma, M. Cyclone warning services in India during recent years: A review. Mausam 2021, 70, 635–666. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Training Set | Testing Set |
|---|---|---|
| Year | 1979–2014 | 2015–2018 |
| # TCs | 160 | 22 |
| # Samples | 2294 | 234 |
| Module | Layer | Output Shape (C, H, W) |
|---|---|---|
| Encoder | Conv | (8, 96, 96) |
| TC-TrajGRU | (64, 96, 96) | |
| Conv | (192, 32, 32) | |
| TC-TrajGRU | (192, 32, 32) | |
| Conv | (192, 16, 16) | |
| TrajGRU | (192, 16, 16) | |
| Forecaster | Conv | (96, 14, 14) |
| Conv | (48, 12, 12) | |
| Conv | (24, 10, 10) | |
| Conv | (12, 6, 6) | |
| Conv | (4, 2, 2) | |
| FC | (4, 2) |
| Models | Mean Distance of Forecast Result/km | |||
|---|---|---|---|---|
| 6 h | 12 h | 18 h | 24 h | |
| LSTM | 29.7 | 62.5 | 101.2 | 145.2 |
| TrajGRU | 35.0 | 81.0 | 106.9 | 150.8 |
| Fusion Net [10] | - | - | - | 138.9 |
| TC-TrajGRU | 28.3 | 58.9 | 93.9 | 130.5 |
| TC-TrajGRU-a | 27.7 | 56.2 | 88.4 | 122.7 |
| TC-TrajGRU-b | 26.7 | 53.1 | 83.7 | 116.6 |
| TC-TrajGRU-c | 26.1 | 53.7 | 84.4 | 117.7 |
| Models | Directional Stability | |||
|---|---|---|---|---|
| 6 h | 12 h | 18 h | 24 h | |
| TC-TrajGRU-b | 88.3% | 84.4% | 83.5% | 81.4% |
| TC-TrajGRU-c | 88.3% | 83.1% | 81.8% | 77.1% |
| Year | 2015 | 2016 | 2017 | 2018 | |
|---|---|---|---|---|---|
| # TCs | 5 | 5 | 4 | 8 | |
| Mean distance of 12 h forecast/km | TC-TrajGRU-b | 50.4 | 56.3 | 55.7 | 50.7 |
| TC-TrajGRU-c | 52.2 | 59.1 | 56.6 | 49.5 | |
| IMD | 54.7 | 59.7 | 43.7 | 55.4 | |
| Mean distance of 24 h forecast/km | TC-TrajGRU-b | 113.7 | 111.53 | 141.5 | 110.4 |
| TC-TrajGRU-c | 119.6 | 120.8 | 137.8 | 108.4 | |
| IMD | 94.4 | 96.1 | 61.4 | 87.5 | |
| Forecast Time | Distance/km | |||
|---|---|---|---|---|
| 6 h | 12 h | 18 h | 24 h | |
| 18 May 2020 06:00 | 60.7 | 74.6 | 121.9 | 114.2 |
| 18 May 2020 12:00 | 42.4 | 70.7 | 84.7 | 81.2 |
| 19 May 2020 12:00 | 30.4 | 22.8 | 9.8 | 94.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, X.; Liu, Z.; Shi, Z. Spatio-Temporal Alignment and Track-To-Velocity Module for Tropical Cyclone Forecast. Remote Sens. 2023, 15, 4938. https://doi.org/10.3390/rs15204938
Geng X, Liu Z, Shi Z. Spatio-Temporal Alignment and Track-To-Velocity Module for Tropical Cyclone Forecast. Remote Sensing. 2023; 15(20):4938. https://doi.org/10.3390/rs15204938
Chicago/Turabian StyleGeng, Xiaoyi, Zili Liu, and Zhenwei Shi. 2023. "Spatio-Temporal Alignment and Track-To-Velocity Module for Tropical Cyclone Forecast" Remote Sensing 15, no. 20: 4938. https://doi.org/10.3390/rs15204938
APA StyleGeng, X., Liu, Z., & Shi, Z. (2023). Spatio-Temporal Alignment and Track-To-Velocity Module for Tropical Cyclone Forecast. Remote Sensing, 15(20), 4938. https://doi.org/10.3390/rs15204938