
On-Orbit Geometric Calibration and Performance Validation of the GaoFen-14 Stereo Mapping Satellite


Abstract
:1. Introduction
- (1)
- We developed a calibration model that accounts for the specific characteristics of the GaoFen-14 satellite, i.e., the integral geometric calibration model with inter-chip constraints.
- (2)
- Based on the characteristics of the long-stitched CCDs of the GaoFen-14 satellite and the specific real-time recording data of the optical axis, five calibration schemes are designed for its on-orbit geometric calibration.
- (3)
- Innovatively, GaoFen-14 specific real-time recording data of the optical axis are adopted in the orbit-calibration schemes C, D, and E, which apply slight revisions to the alignment angle calibration values using the dichotomous search approach.
2. GaoFen-14 Satellite Payload
3. Material and Methods
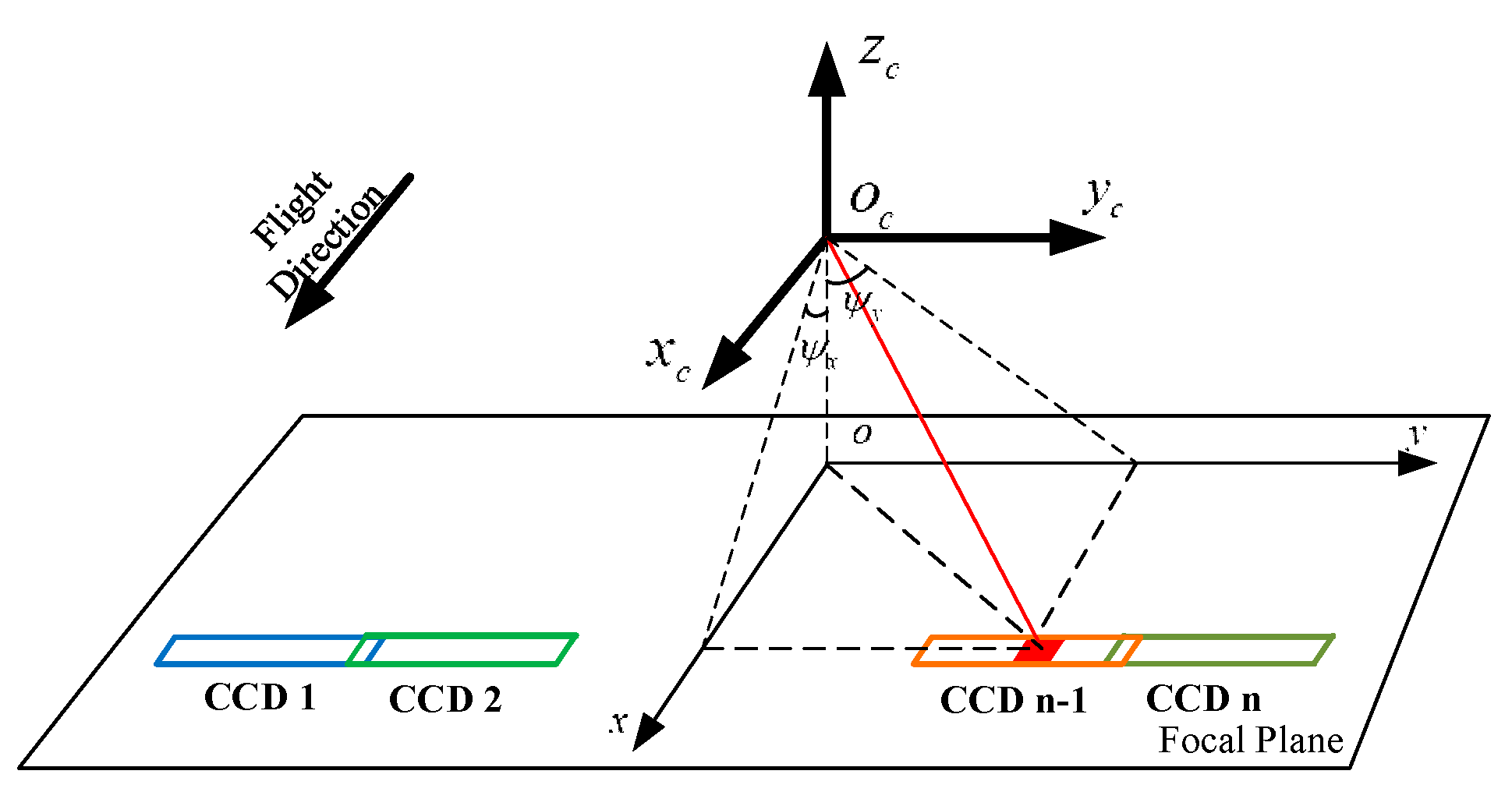
3.1. On-Orbit Calibration Model without Considering the Internal Error of the CCD Chips
3.2. Integral On-Orbit Calibration Model Taking into Account the Inter-Chip Geometry Constraints
3.3. Correction of Alignment Angle Based on Optical Axis Position Measurement Data
4. On-Orbit Geometric Calibration Process and Schemes
- (1)
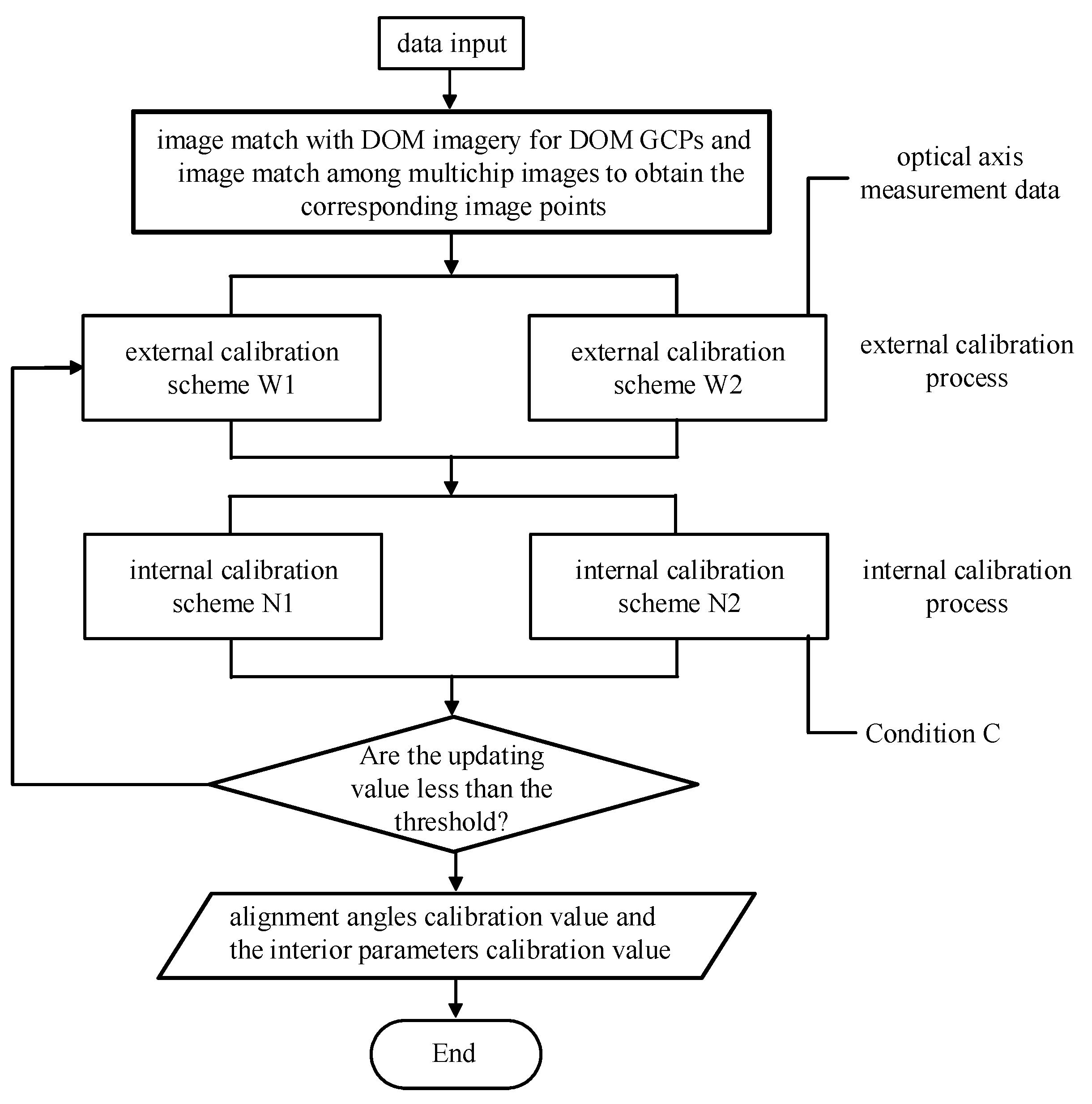
- Image matching is implemented on all chip images and the high-resolution digital orthophoto map (DOM) to automatically obtain the DOM ground control points (GCPs). The height value of GCPs can be interpolated from corresponding DEM (digital elevation model) data. Additionally, image matching is performed on the multichip images to obtain the corresponding image points in the overlap areas of adjacent chips.
- (2)
- External calibration is conducted using two external calibration schemes, W1 and W2. Scheme W1 calibrates the same set of alignment angles for both the forward and backward views. Scheme W2 calibrates two different sets of alignment angles separately for the forward view and the backward view. Furthermore, two sets of calibrated alignment angles through W2 are corrected using the optical axis position measurement data.
- (3)
- Internal calibration is carried out using two internal calibration schemes, N1 and N2, and condition C can be taken into account. With N1, the same set of interior calibration parameters, c0, c1, c2, c3, r0, r1, r2, and r3, is calibrated for multi-chip images of the forward and backward views, resulting in the determination of two sets of interior calibration parameters. With N2, an independent set of interior calibration parameters is calibrated for each chip, leading to the calculation of nine sets of interior calibration parameters for the forward view and six sets for the backward view.
- (4)
- The external calibration and internal calibration are performed iteratively, and the iteration cycle continues until the updated values of the alignment angle and interior calibration parameters are below the threshold values. Finally, the alignment angles and the interior calibration parameters are output as the calibration results. The interior calibration parameters are then used to generate the probe pointing angle of each CCD unit on the forward and backward views.
- On-orbit geometric calibration scheme AThe external calibration uses scheme W1, utilizing the same set of alignment angles for the forward and backward images. The internal calibration uses scheme N1, employing a single set of interior calibration parameters for all chips within the same view.
- On-orbit geometric calibration scheme BThe external calibration is performed using scheme W1, which utilizes the same set of alignment angles for the forward and backward images. The internal calibration uses scheme N2 and condition C is taken into account, where independent interior calibration parameters are determined for each chip in both the forward and backward views.
- On-orbit geometric calibration scheme CThe external calibration uses scheme W2, which involves two sets of alignment angles for the forward and backward views. The internal calibration follows scheme N1, utilizing a single set of interior calibration parameters for all chips within the same view. Moreover, the two sets of calibrated alignment angles are further refined by incorporating the optical axis position measurement data.
- On-orbit geometric calibration scheme DThe external calibration adopts scheme W2, with two sets of alignment angles for the forward and backward views, respectively, and the internal calibration adopts scheme N2 and condition C, with independent inner calibration parameters for each chip in the forward/backward view image. Moreover, two sets of calibrated alignment angles are corrected using the optical axis position measurement data.
- On-orbit geometric calibration scheme EAll of the internal and external calibration settings of scheme E are identical to those of scheme D, except that scheme E does not consider condition C.
- Whether it is more appropriate for the forward and backward images share the same set of alignment angles or to involve two independent sets of alignment angles for the GaoFen-14 satellite calibration, with the support of the optical axis position measurement data.
- Whether there is independent and inconsistent geometric distortion among different CCD chips.
5. Results and Discussion
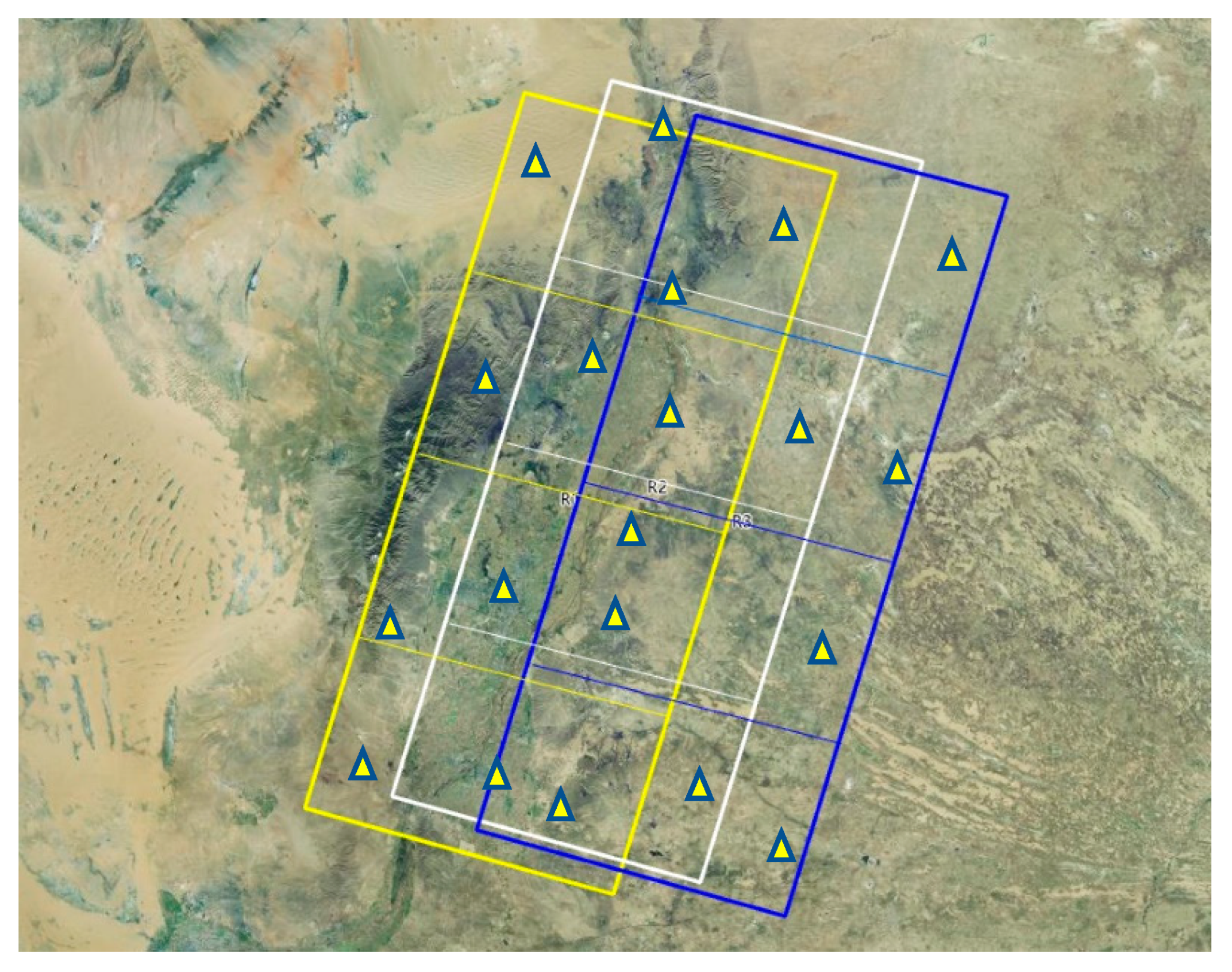
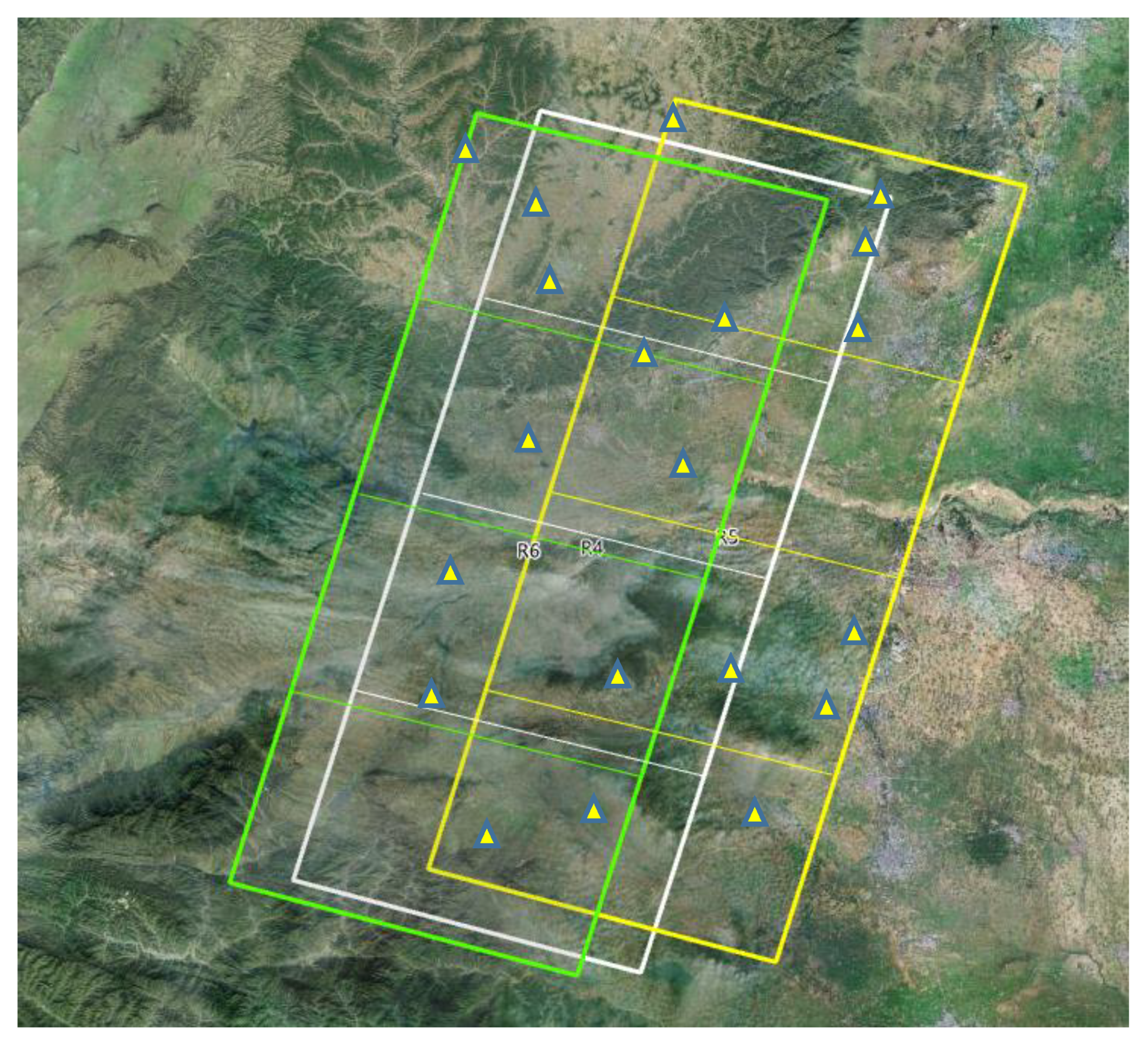
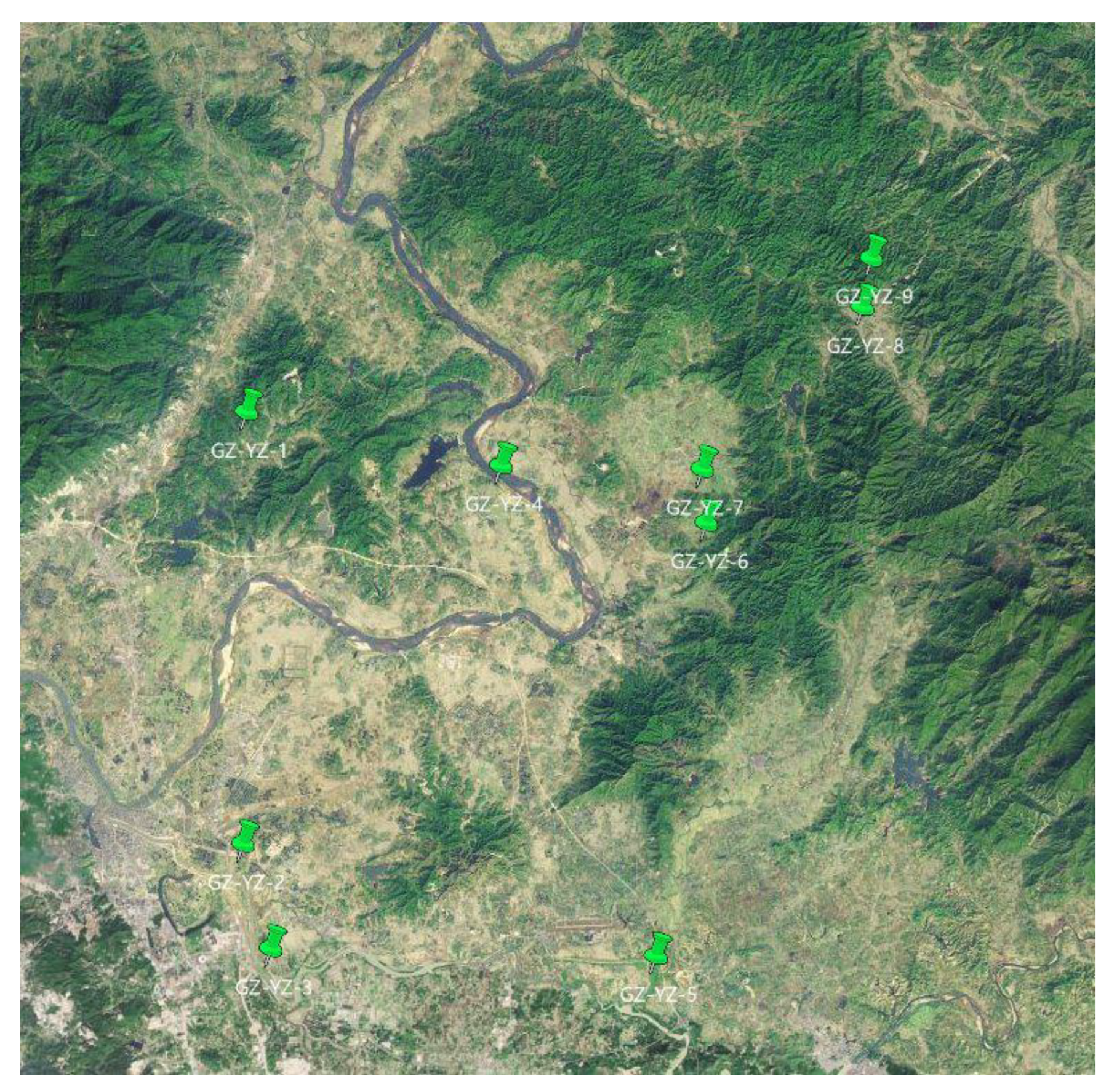
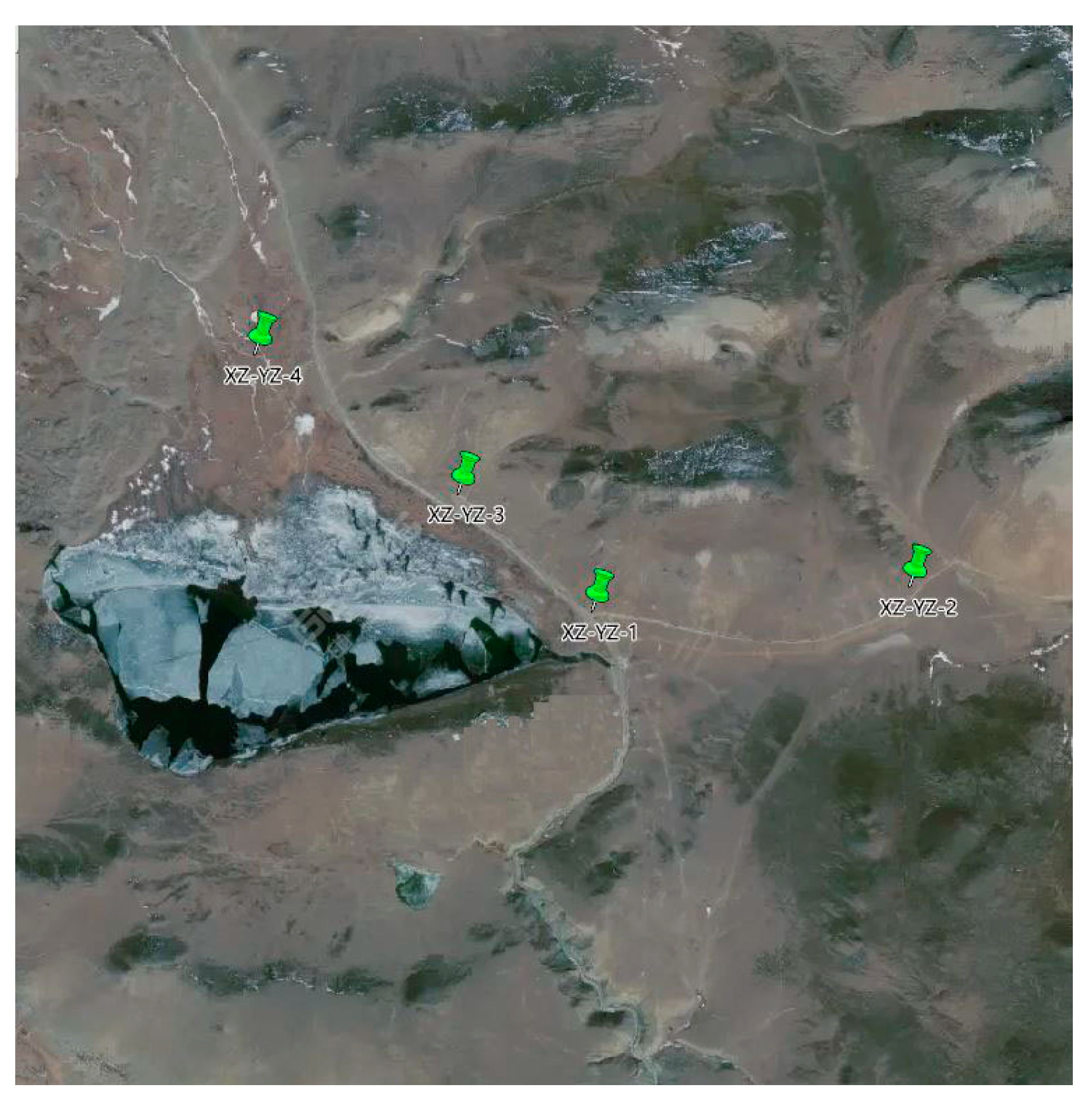
5.1. Experiment Data
5.2. Experimental Results and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Grün, A. Potential and limitations of highresolution satellite imagery. In Proceedings of the 21st Asian Conference on Remote Sensing, Taipei, Taiwan, 4–8 December 2000; Swiss Federal Institute of Technology, Institute of Geodesy and Photogrammetry: Zurich, Switzerland, 2000. [Google Scholar]
- Bouillon, A.; Breton, E.; Lussy, F.D.; Gachet, R. SPOT5 geometric image quality. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 303–305. [Google Scholar]
- Valorge, C.; Meygret, A.; Lebègue, L.; Henry, P.; Bouillon, A.; Gachet, R.; Breton, E.; Léger, D.; Viallefont, F. Forty years of experience with SPOT in-flight calibration. In Proceedings of the International Workshop on Radiometric and Geometric Calibration, Gulfport, MS, USA, 2–5 December 2003; pp. 119–133. [Google Scholar]
- Ebner, H.; Kornus, W.; Ohlhof, T.; Putz, E. Orientation of MOMS-02/D2 and MOMS-2P/PRIRODA imagery. ISPRS J. Photogramm. Remote Sens. 1999, 54, 332–341. [Google Scholar] [CrossRef]
- Kornus, W.; Lehner, M.; Schroeder, M. Geometric in-flight calibration of the stereoscopic line-CCD scanner MOMS-2P. ISPRS J. Photogramm. Remote Sens. 2000, 55, 59–71. [Google Scholar] [CrossRef]
- Kocaman, S.; Gruen, A. Orientation and self-calibration of ALOS PRISM imagery. Photogramm. Rec. 2008, 23, 323–340. [Google Scholar] [CrossRef]
- Tadono, T.; Shimada, M.; Hashimoto, T.; Takaku, J.; Mukaida, A.; Kawamoto, S. Results of calibration and validation of ALOS optical sensors, and their accuracy assesments. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 3602–3605. [Google Scholar]
- Gruen, A.; Kocaman, S.; Wolff, K. Calibration and validation of early alos/prism images. J. Jpn. Soc. Photogramm. Remote Sens. 2007, 46, 24–38. [Google Scholar]
- Jacobsen, K. Issues and methods for in-flight and on-orbit calibration. In Proceedings of the International Workshop on Radiometric and Geometric Calibration, Gulfport, MS, USA, 2–5 December 2003; Volume 2, pp. 83–92. [Google Scholar]
- Radhadevi, P.V.; Solanki, S.S.; Ramchandran, R.; Krishnan, R. Pre-processing considerations of IRS-P6 LISS-4 imagery. Int. J. Appl. Earth Obs. Geoinf. 2008, 10, 133–139. [Google Scholar] [CrossRef]
- Kocaman, S.; Wolff, K.; Gruen, A.; Baltsavias, E. Geometric validation of Cartosat-1 imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1363–1368. [Google Scholar]
- Baltsavias, E.; Kocaman, S.; Akca, D.; Wolff, K. Geometric and radiometric investigations of Cartosat-1 data. In Proceedings of the ISPRS Hannover Workshop 2007, “High Resolution Earth Imaging for Geospatial Information”, Hannover, Germany, 29 May–1 June 2007; Volume 12, pp. 224–234. [Google Scholar]
- Grodecki, J.; Dial, G. Ikonos geometric accuracy. In Proceedings of the Joint Workshop of ISPRS Working Groups I/2, I/5 and IV/7 on High Resolution Mapping from Space 2001, Hanover, Germany, 19–21 September 2001. [Google Scholar]
- Grodecki, J.; Lutes, J. IKONOS geometric calibrations. In Proceedings of the ASPRS 2005 Annual Conference, Baltimore, MD, USA, 7–11 March 2005. [Google Scholar]
- Mulawa, D. On-orbit Geometric Calibration of the Orbview-3 high Resolution Imaging Satellite. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 1–6. [Google Scholar]
- Aguilar, M.A.; Aguilar, F.J.; Mar Saldaña, M.D.; Fernández, I. Geopositioning Accuracy Assessment of GeoEye-1 Panchromatic and Multispectral Imagery. Photogramm. Eng. Remote Sens. 2012, 78, 247–257. [Google Scholar] [CrossRef]
- Crespi, M.; Colosimo, G.; De Vendictis, L.; Fratarcangeli, F.; Pieralice, F. GeoEye-1: Analysis of Radiometric and Geometric Capability. In Personal Satellite Services, Proceedings of the Second International ICST Conference, PSATS 2010, Rome, Italy, 4–5 February 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 354–369. [Google Scholar]
- Li, X.; Li, L.; Zhao, L.; Jiao, J.; Jiang, L.; Yang, L.; Chen, F.; Sun, S. In-Orbit Geometric Calibration for Long-Linear-Array and Wide-Swath Whisk-Broom TIS of SDGSAT-1. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Wang, J.; Wang, R.; Hu, X.; Su, Z. The on-orbit calibration of geometric parameters of the Tian-Hui 1 (TH-1) satellite. ISPRS J. Photogramm. Remote Sens. 2017, 124, 144–151. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, T.; Feng, W.; Yuan, Z.; Wang, S. Self-calibration Block Adjustment for Mapping Satellite-1 Three Linear CCD Images. J. Remote Sens. 2015, 19, 219–227. [Google Scholar]
- Jiang, Y.; Zhang, G.; Wang, T.; Li, D.; Zhao, Y. In-Orbit Geometric Calibration without Accurate Ground Control Data. Photogramm. Eng. Remote Sens. 2018, 84, 485–493. [Google Scholar] [CrossRef]
- Yang, B.; Pi, Y.; Li, X.; Yang, Y. Integrated geometric self-calibration of stereo cameras onboard the ZiYuan-3 satellite. ISPRS J. Photogramm. Remote Sens. 2020, 162, 173–183. [Google Scholar] [CrossRef]
- Cao, H.; Dai, J.; Zhang, X.; Zhao, C.; Liu, F.; Guo, A.; Xu, C. Study on the Development Approach of GF-7 High Precision Optical Stereo Mapping Satellite. Spacecr. Recovery Remote Sens. 2020, 41, 17–28. [Google Scholar]
- Tang, X.; Liu, C.; Zhang, H.; Wang, X.; Li, G.; Mo, F.; Li, F. GF-7 Satellite Stereo Images Block Adjustment Assisted with Laser Altimetry Data. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1423–1430. [Google Scholar]
- Wang, J.; Yang, Y.; Hu, Y.; Lü, Y.; Yang, X.; Lu, X.; Cao, B. Preliminary Location Accuracy Assessments of GF-14 Stereo Mapping Satellite Without Ground Control Points. Acta Geod. Cartogr. Sin. 2023, 52, 8. [Google Scholar]
- Lu, X.; Wang, J.; Yang, X.; Lv, Y.; Hu, Y.; Wei, Y.; Cao, B. High-precision On-orbit Geometric Calibration of the GF-14 Satellite Dual-line-array Cameras. Acta Geod. Cartogr. Sin. 2023, 52, 15. [Google Scholar]
- Weser, T.; Rottensteiner, F.; Willneff, J.; Fraser, C. A generic pushbroom sensor model for high-resolution satellite imagery applied to SPOT 5, QuickBird and ALOS data sets. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, 6. [Google Scholar]
- Weser, T.; Rottensteiner, F.; Willneff, J.; Poon, J.; Fraser, C.S. Development and testing of a generic sensor model for pushbroom satellite imagery. Photogramm. Rec. 2008, 23, 255–274. [Google Scholar] [CrossRef]
- Zhang, L.; Gruen, A. Automatic DSM generation from linear array imagery data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 128–133. [Google Scholar]
- Zhang, L.; Gruen, A. Multi-image matching for DSM generation from IKONOS imagery. ISPRS J. Photogramm. Remote Sens. 2006, 60, 195–211. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, M.; Xiong, J.; Lu, Y.; Xiong, X. On-Orbit Geometric Calibration of ZY-3 Three-Line Array Imagery with Multistrip Data Sets. IEEE Trans. Geosci. Remote Sens. 2014, 52, 224–234. [Google Scholar] [CrossRef]
- Wang, M.; Cheng, Y.; Tian, Y.; He, L.; Wang, Y. A New On-Orbit Geometric Self-Calibration Approach for the High-Resolution Geostationary Optical Satellite GaoFen4. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1670–1683. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y.; Zhang, Y.; Zhang, Z.; Xiao, X.; Yu, Y.; Wang, L. A Spliced Satellite Optical Camera Geometric Calibration Method Based on Inter-Chip Geometry Constraints. Remote Sens. 2021, 13, 2832. [Google Scholar] [CrossRef]
- Wang, T.; Meng, W.; Zhang, Y. Linear Sensors Geometric Calibration and Positioning Technology and Application; Science Press: Beijing, China, 2020; ISBN 978-7-03-064508-1. [Google Scholar]
- Zhu, X.; Tang, X.; Zhang, G.; Liu, B.; Hu, W.; Pan, H. Long-Periodic Analysis of Boresight Misalignment of Ziyuan3-01 Three-Line Camera. Remote Sens. 2022, 14, 1157. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y.; Zhang, Y.; Jiang, G.; Zhang, Z.; Yu, Y.; Dou, L. Geometric Calibration for the Aerial Line Scanning Camera GFXJ. Photogramm. Eng. Remote Sens. 2019, 85, 643–658. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Field | Scheme | Pre-Calibration | Post-Calibration | ||||
|---|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | ||
| 27 December 2020 NingXia | Scheme A | 164.12 | 220.11 | 182.03 | 0.371 | 0.352 | 0.370 |
| Scheme B | \ | \ | \ | 0.372 | 0.349 | 0.369 | |
| Scheme C | \ | \ | \ | 0.369 | 0.345 | 0.387 | |
| Scheme D | \ | \ | \ | 0.368 | 0.351 | 0.369 | |
| Scheme E | \ | \ | \ | 0.369 | 0.352 | 0.376 | |
| 31 December 2020 NingXia | Scheme A | 154.39 | 217.98 | 176.05 | 0.392 | 0.313 | 0.348 |
| Scheme B | \ | \ | \ | 0.305 | 0.311 | 0.345 | |
| Scheme C | \ | \ | \ | 0.387 | 0.306 | 0.346 | |
| Scheme D | \ | \ | \ | 0.301 | 0.312 | 0.357 | |
| Scheme E | \ | \ | \ | 0.386 | 0.314 | 0.356 | |
| 4 January 2021 NingXia | Scheme A | 167.83 | 232.11 | 186.09 | 0.368 | 0.301 | 0.321 |
| Scheme B | \ | \ | \ | 0.357 | 0.397 | 0.364 | |
| Scheme C | \ | \ | \ | 0.349 | 0.399 | 0.368 | |
| Scheme D | \ | \ | \ | 0.326 | 0.303 | 0.349 | |
| Scheme E | \ | \ | \ | 0.334 | 0.356 | 0.353 | |
| 3 March 2021 Songshan | Scheme A | 159.07 | 212.08 | 172.11 | 0.367 | 0.402 | 0.389 |
| Scheme B | \ | \ | \ | 0.362 | 0.369 | 0.372 | |
| Scheme C | \ | \ | \ | 0.370 | 0.385 | 0.383 | |
| Scheme D | \ | \ | \ | 0.371 | 0.381 | 0.379 | |
| Scheme E | \ | \ | \ | 0.369 | 0.386 | 0.382 | |
| 22 March 2021 Songshan | Scheme A | 164.05 | 207.03 | 179.72 | 0.373 | 0.369 | 0.396 |
| Scheme B | \ | \ | \ | 0.358 | 0.334 | 0.391 | |
| Scheme C | \ | \ | \ | 0.346 | 0.321 | 0.386 | |
| Scheme D | \ | \ | \ | 0.357 | 0.332 | 0.369 | |
| Scheme E | \ | \ | \ | 0.356 | 0.347 | 0.371 | |
| 6 March 2021 Songshan | Scheme A | 163.02 | 209.56 | 174.32 | 0.368 | 0.342 | 0.387 |
| Scheme B | \ | \ | \ | 0.372 | 0.339 | 0.364 | |
| Scheme C | \ | \ | \ | 0.368 | 0.338 | 0.321 | |
| Scheme D | \ | \ | \ | 0.367 | 0.347 | 0.365 | |
| Scheme E | \ | \ | \ | 0.371 | 0.346 | 0.368 | |
| Scheme | Forward View | Backward View | ||||
|---|---|---|---|---|---|---|
| Scheme A | 1.1949 × 10−3 | −2.3187 × 10−3 | −9.7785 × 10−4 | \ | \ | \ |
| Scheme B | 1.1962 × 10−3 | −2.2989 × 10−3 | −9.6696 × 10−4 | \ | \ | \ |
| Scheme C | 1.1951 × 10−3 | −2.3292 × 10−3 | −1.0726 × 10−4 | 1.3753 × 10−3 | −3.1789 × 10−3 | −8.8095 × 10−4 |
| Scheme D | 1.1950 × 10−3 | −2.3291 × 10−3 | −1.0723 × 10−3 | 1.3756 × 10−3 | −3.1787 × 10−3 | −8.8095 × 10−4 |
| Scheme E | 1.19511 × 10−3 | −2.3291 × 10−3 | −1.0725 × 10−3 | 1.3755 × 10−3 | −3.1786 × 10−3 | −8.8094 × 10−4 |
| Scheme | CCD | c0 | c1 | c2 | c3 | r0 | r1 | r2 | r3 |
|---|---|---|---|---|---|---|---|---|---|
| A | One CCD | c0 + 3.12786 × 10−6 | 7.14346 × 10−11 | 5.87654 × 10−16 | −8.98754 × 10−17 | r0 − 9.12657 × 10−6 | 1.09854 × 10−9 | −2.01433 × 10−15 | −2.87543 × 10−17 |
| B | CCD1 | c0 − 5.87653 × 10−6 | 3.54312 × 10−8 | −5.43098 × 10−12 | 3.01287 × 10−16 | r0 − 6.01245 × 10−5 | 1.98754 × 10−9 | 6.98665 × 10−13 | 5.21132 × 10−17 |
| CCD2 | c0 + 3.01456 × 10−7 | 2.65032 × 10−8 | 7.01243 × 10−12 | −4.86754 × 10−16 | r0 − 4.01254 × 10−6 | 5.34982 × 10−9 | −3.03265 × 10−12 | −3.87654 × 10−16 | |
| CCD3 | c0 − 2.09876 × 10−5 | −3.21065 × 10−8 | 3.02154 × 10−12 | 5.03156 × 10−16 | r0 + 1.98765 × 10−6 | −2.01764 × 10−8 | −5.09812 × 10−12 | 3.65036 × 10−16 | |
| CCD4 | c0 + 3.32386 × 10−5 | −3.21543 × 10−8 | −6.65432 × 10−12 | 5.90765 × 10−16 | r0 + 2.01324 × 10−6 | 6.98776 × 10−9 | 5.098012 × 10−12 | −3.02897 × 10−16 | |
| CCD5 | c0 + 5.02154× 10−5 | 5.12354 × 10−8 | 5.09854 × 10−12 | −4.07623 × 10−16 | r0 + 2.00176 × 10−6 | −3.08123 × 10−8 | 4.89765 × 10−12 | 4.26677 × 10−16 | |
| CCD6 | c0 + 7.76431× 10−6 | −1.07865 × 10−8 | −2.18765 × 10−12 | −3.08142 × 10−16 | r0 − 6.65021 × 10−6 | 4.89532 × 10−9 | 3.10256 × 10−12 | −7.87665 × 10−17 | |
| CCD7 | c0 − 2.01432 × 10−5 | −6.32321 × 10−8 | 4.89705 × 10−12 | 4.02145 × 10−16 | r0 + 3.01254 × 10−7 | 2.01954 × 10−8 | 4.98654 × 10−12 | 6.09825 × 10−16 | |
| CCD8 | c0 + 2.87432 × 10−5 | 3.01234 × 10−8 | −7.12487 × 10−12 | 4.97653 × 10−16 | r0 + 2.89765 × 10−6 | 2.01132 × 10−8 | −1.09875 × 10−12 | 3.01875 × 10−16 | |
| CCD9 | c0 − 6.98432×10−5 | 6.65655 × 10−8 | −2.21790 × 10−12 | −2.04182 × 10−15 | r0 + 6.08432 × 10−6 | 1.50820 × 10−9 | 4.89065 × 10−13 | 3.89065 × 10−17 | |
| C | One CCD | c0 + 1.26260 × 10−7 | 2.25532 × 1012 | 6.19374 × 10−18 | −6.57949 × 10−18 | r0 − 5.89887 × 10−6 | 1.68867 × 10−10 | −1.73539 × 10−16 | −3.27122 × 10−18 |
| D | CCD1 | c0 − 6.67052 × 10−7 | 1.28021 × 10−9 | −3.38067 × 10−13 | 2.66928 × 10−17 | r0 − 5.68926 × 10−6 | −1.54136 × 10−10 | 7.97770 × 10−14 | −6.23297 × 10−18 |
| CCD2 | c0 + 2.94176 × 10−8 | −1.70277 × 10−9 | 6.59197 × 10−13 | −5.55865 × 10−17 | r0 − 3.41873 × 10−6 | 6.66062 × 10−10 | −2.60443 × 10−13 | 2.60957 × 10−17 | |
| CCD3 | c0 − 1.77689 × 10−6 | 1.44824 × 10−9 | −4.67132 × 10−13 | 4.37107 × 10−17 | r0 − 1.72258 × 10−6 | −1.88854 × 10−9 | 4.14050 × 10−13 | −2.34076 × 10−17 | |
| CCD4 | c0 − 2.13007 × 10−6 | 2.54953 × 10−9 | −7.31533 × 10−13 | 6.50799 × 10−17 | r0 − 1.97173 × 10−6 | 7.71779 × 10−10 | −3.72814 × 10−13 | 4.57146 × 10−17 | |
| CCD5 | c0 + 3.29697 × 10−6 | −3.75481 × 10−9 | 8.82773 × 10−13 | −5.95963 × 10−17 | r0 + 1.87463 × 10−6 | −2.51743 × 10−9 | 6.81258 × 10−13 | −5.26677 × 10−17 | |
| CCD6 | c0 − 9.48875 × 10−7 | 1.11729 × 10−9 | −3.23022 × 10−13 | 2.52726 × 10−17 | r0 + 8.60342 × 10−7 | 5.04209 × 10−10 | −1.00515 × 10−13 | 9.24055 × 10−18 | |
| CCD7 | c0 + 1.38950 ×10−6 | −2.16261 × 10−9 | 5.70841 × 10−13 | −3.90476 × 10−17 | r0 + 1.98071 × 10−7 | 1.96840 × 10−9 | −5.11690 × 10−13 | 4.18126 × 10−17 | |
| CCD8 | c0 − 3.86604 × 10−6 | 3.77222 × 10−9 | −8.34704 × 10−13 | 6.09683 × 10−17 | r0 + 3.39364 × 10−6 | 1.50112 × 10−9 | −2.45358 × 10−13 | 1.36974 × 10−17 | |
| CCD9 | c0 − 7.42672 × 10−6 | 7.46677 × 10−9 | −1.91790 × 10−12 | 1.42740 × 10−17 | r0 + 5.25230 × 10−6 | 1.50820 × 10−10 | −5.91807 × 10−14 | 4.70404 × 10−18 |
| Validation Data | Calibration Scheme | Pre-Calibration | Post-Calibration CANning | Post-Calibration CANsong | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | X | Y | Z | ||
| Guangzhou | Scheme A | 178.02 | 229.14 | 201.11 | 2.42 | 1.50 | 2.18 | 2.39 | 1.48 | 2.09 |
| Scheme B | \ | \ | \ | 2.49 | 1.38 | 2.23 | 2.56 | 1.61 | 2.07 | |
| Scheme C | \ | \ | \ | 1.12 | 0.41 | 0.78 | 1.09 | 0.45 | 0.77 | |
| Scheme D | \ | \ | \ | 1.11 | 0.43 | 0.80 | 1.07 | 0.43 | 0.79 | |
| Scheme E | \ | \ | \ | 1.13 | 0.44 | 0.81 | 1.09 | 0.44 | 0.79 | |
| Tibet | Scheme A | 232.81 | 222.15 | 243.22 | 2.12 | 1.29 | 1.87 | 2.32 | 1.18 | 1.79 |
| Scheme B | \ | \ | \ | 2.22 | 1.26 | 1.95 | 2.28 | 1.17 | 1.82 | |
| Scheme C | \ | \ | \ | 1.14 | 0.46 | 0.81 | 1.12 | 0.43 | 0.80 | |
| Scheme D | \ | \ | \ | 1.13 | 0.45 | 0.80 | 1.13 | 0.41 | 0.81 | |
| Scheme E | \ | \ | \ | 1.14 | 0.46 | 0.80 | 1.14 | 0.42 | 0.82 | |
| Hetian | Scheme A | 227.56 | 217.98 | 194.18 | 1.98 | 1.02 | 1.28 | 1.97 | 1.09 | 1.25 |
| Scheme B | \ | \ | \ | 1.93 | 1.09 | 1.31 | 1.96 | 1.08 | 1.33 | |
| Scheme C | \ | \ | \ | 1.13 | 0.42 | 0.79 | 1.14 | 0.41 | 0.81 | |
| Scheme D | \ | \ | \ | 1.09 | 0.45 | 0.80 | 1.13 | 0.43 | 0.79 | |
| Scheme E | \ | \ | \ | 1.11 | 0.44 | 0.81 | 1.14 | 0.42 | 0.81 | |
| South Africa | Scheme A | 189.11 | 198.14 | 177.23 | 4.67 | 3.23 | 3.11 | 4.80 | 3.19 | 3.33 |
| Scheme B | \ | \ | \ | 4.89 | 3.32 | 3.27 | 4.72 | 3.17 | 3.45 | |
| Scheme C | \ | \ | \ | 0.96 | 0.47 | 0.81 | 0.99 | 0.48 | 0.81 | |
| Scheme D | \ | \ | \ | 0.94 | 0.48 | 0.80 | 1.08 | 0.46 | 0.78 | |
| Scheme E | \ | \ | \ | 0.95 | 0.49 | 0.81 | 1.06 | 0.47 | 0.79 | |
| Number | Probe Differences (Unit: Pixel) | Forward Camera | Backward Camera | ||
|---|---|---|---|---|---|
| Number | Percentage | Number | Percentage | ||
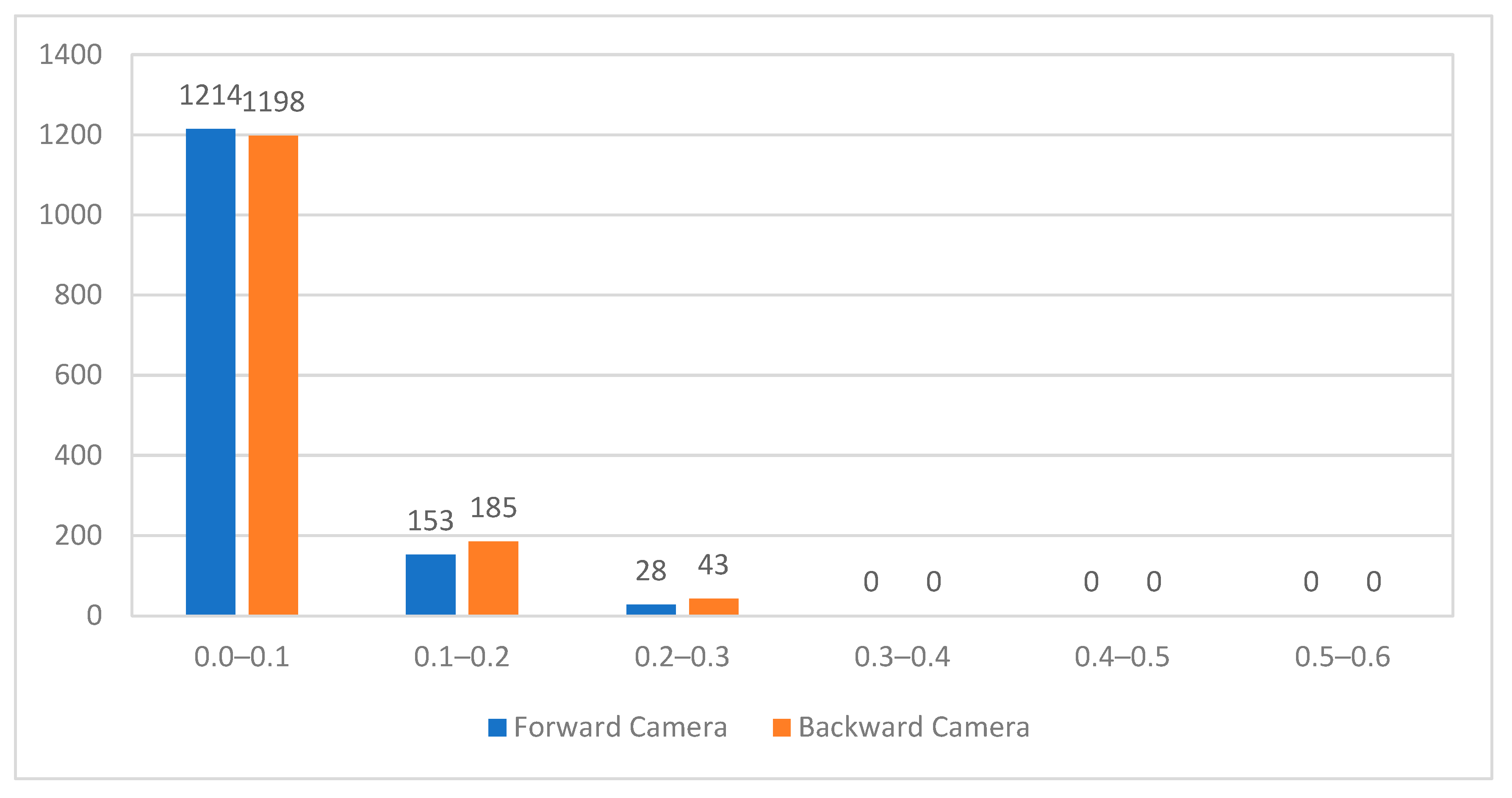
| Sample Number | 1395 | 1425 | |||
| Number and Percentage of Probes in Various Differences | 0.0–0.1 | 1214 | 87% | 1198 | 84% |
| 0.1–0.2 | 153 | 11% | 185 | 13% | |
| 0.2–0.3 | 28 | 2% | 43 | 3% | |
| 0.3–0.4 | 0 | 0% | 0 | 0% | |
| 0.4–0.5 | 0 | 0% | 0 | 0% | |
| 0.5–0.6 | 0 | 0% | 0 | 0% | |
| RMSE (Unit: pixel) | Along track | 0.03 | 0.03 | ||
| Across track | 0.05 | 0.06 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, T.; Zheng, T.; Zhang, Y.; Li, L.; Yu, Y.; Li, L. On-Orbit Geometric Calibration and Performance Validation of the GaoFen-14 Stereo Mapping Satellite. Remote Sens. 2023, 15, 4256. https://doi.org/10.3390/rs15174256
Zhang Y, Wang T, Zheng T, Zhang Y, Li L, Yu Y, Li L. On-Orbit Geometric Calibration and Performance Validation of the GaoFen-14 Stereo Mapping Satellite. Remote Sensing. 2023; 15(17):4256. https://doi.org/10.3390/rs15174256
Chicago/Turabian StyleZhang, Yan, Tao Wang, Tuanjie Zheng, Yongsheng Zhang, Lei Li, Ying Yu, and Li Li. 2023. "On-Orbit Geometric Calibration and Performance Validation of the GaoFen-14 Stereo Mapping Satellite" Remote Sensing 15, no. 17: 4256. https://doi.org/10.3390/rs15174256
APA StyleZhang, Y., Wang, T., Zheng, T., Zhang, Y., Li, L., Yu, Y., & Li, L. (2023). On-Orbit Geometric Calibration and Performance Validation of the GaoFen-14 Stereo Mapping Satellite. Remote Sensing, 15(17), 4256. https://doi.org/10.3390/rs15174256