4.2.1. Popular Equipment
Various techniques have been used to evaluate pavement roughness over time. In the early days, simple straightedges were used as the sole means to evaluate pavement roughness. Over time, enormous efforts and extensive research were focused on developing more sophisticated equipment to measure roughness. In the first half of the twentieth century, different pieces of equipment with varying levels of sophistication were designed. Initially, the developed equipment was primarily mechanical with elaborated multi-wheel support systems, usually referred to as profilographs. With time, advanced technologies were employed to develop devices that incorporate mechanical systems, electrical circuits, electronics, accelerometers, infrared, ultrasonics, and lasers [
50].
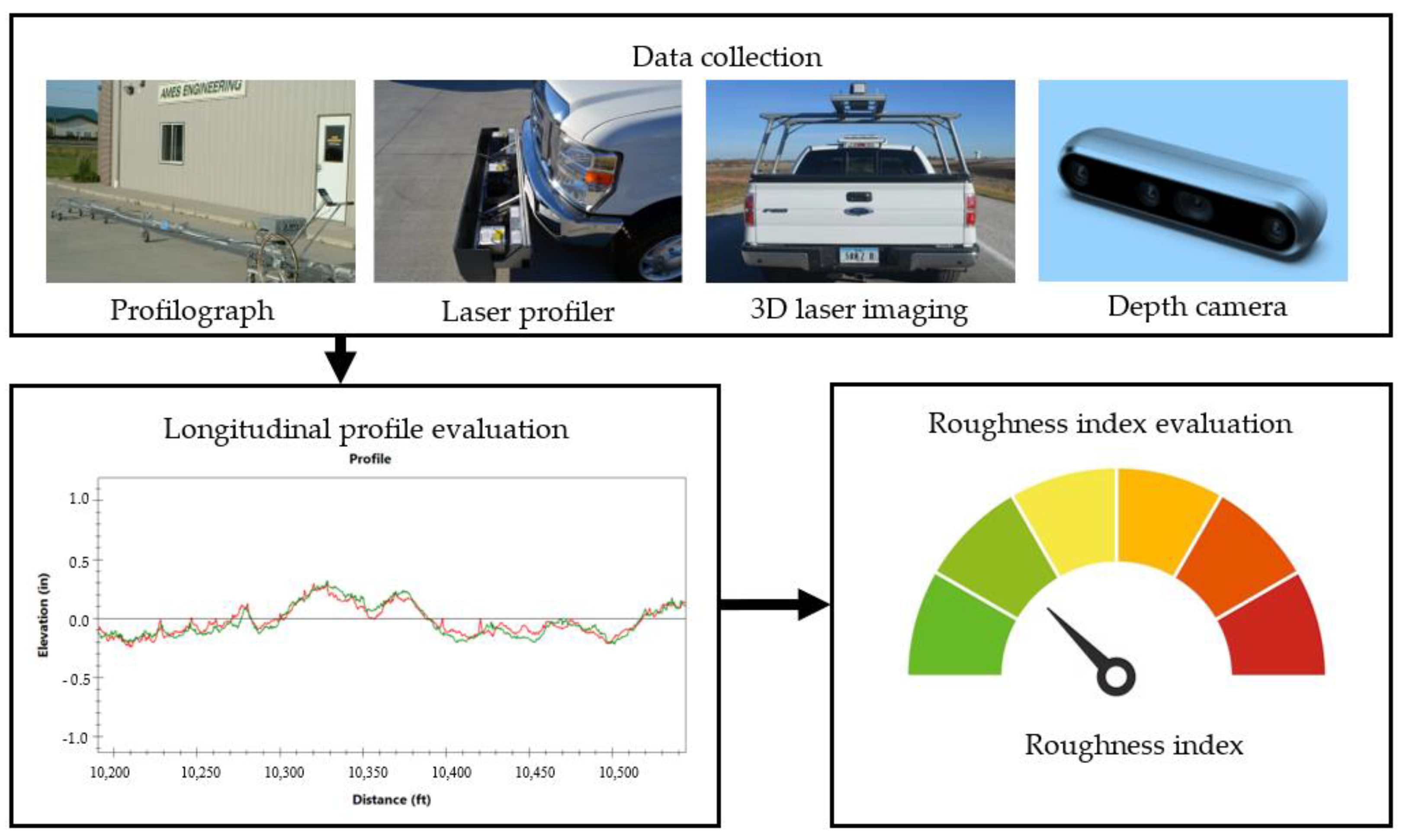
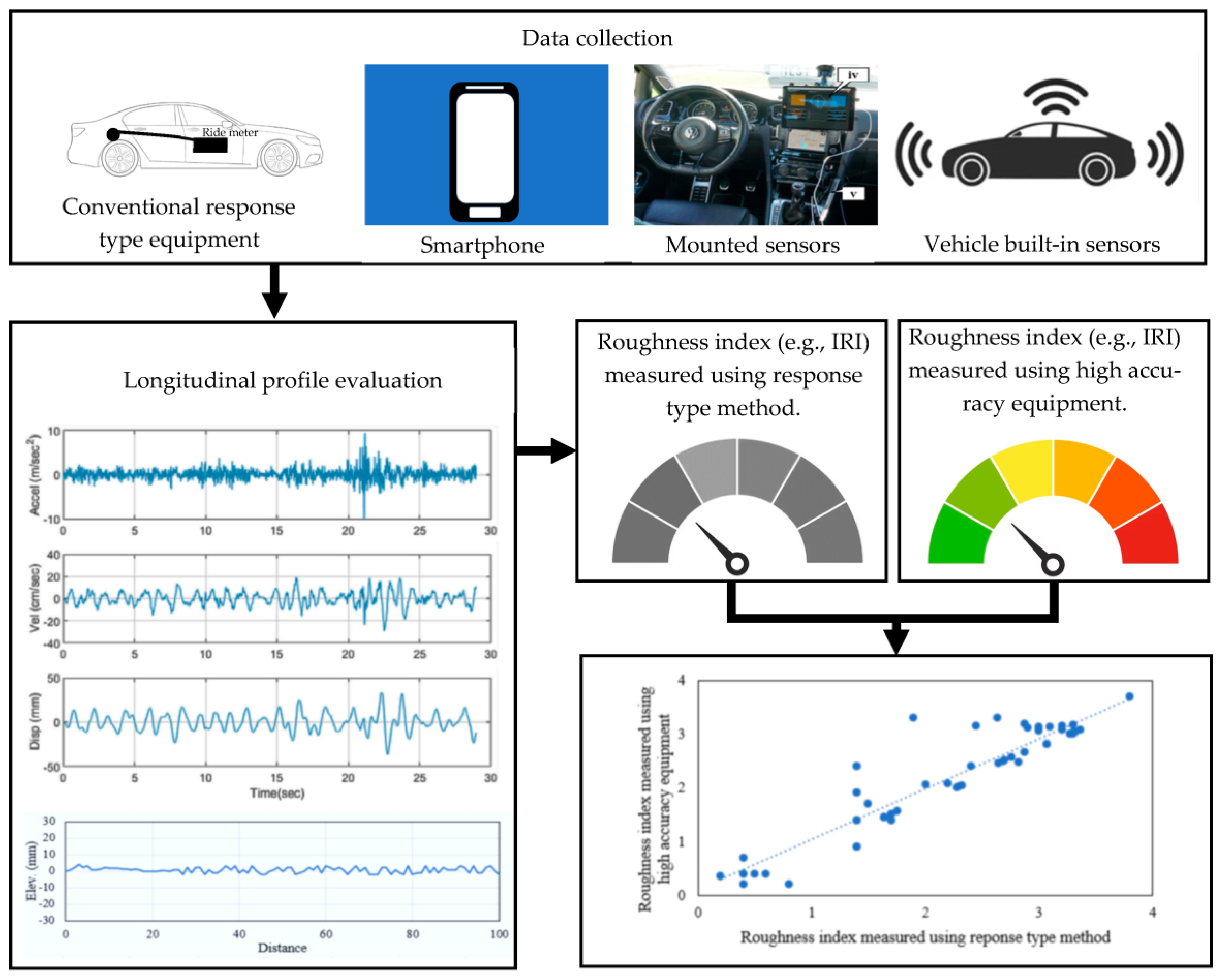
Pavement roughness equipment can be categorized based on different considerations. However, roughness measurement equipment can broadly be classified into two main groups based on their application principle. The first category constitutes equipment that is used for direct measurement of pavement profile. As shown in
Figure 9, such equipment type includes profilographs, laser profilers, and 3D imaging systems (e.g., laser-based imaging systems and depth cameras). The longitudinal profile is evaluated using the collected data to ultimately calculate the roughness index, usually expressed as an IRI value. The second category includes equipment that indirectly measures the pavement profile. Alternatively, they measure vehicle response to pavement profile irregularities.
Figure 10 presents some acceleration-based equipment: conventional response-type equipment (e.g., Mays meter), smartphones, mounted accelerometers, and vehicles’ built-in sensors. The collected acceleration signals are double-integrated to obtain the displacement that is used for evaluating the longitudinal profile [
51]. The calculated roughness index is correlated with the corresponding values measured using high-accuracy equipment such as laser profilers [
52]. In this study, the latter type of equipment is tagged as response-type equipment.
World Bank classification is another widely used categorization of pavement roughness measurement equipment [
52]. The different types of equipment were classified considering their precision measurement of IRI. Class I constitutes precision profilers with the highest roughness measurement accuracy. However, Class II profilers are of a lower accuracy than those of Class I. Class III includes mechanical or electronic equipment to evaluate the pavement roughness indirectly. These devices are calibrated by correlating their measures with standardized roughness values. Class IV includes subjective evaluation of pavement roughness via visual inspection or by driving over the pavement section. Class IV represents a qualitative assessment based on guidance and personal experience. A brief description of some of the previously and currently popular roughness techniques in North America is presented.
Profilographs consist of a beam or frame carried by a system of wheels in addition to a profile wheel to measure pavement roughness. The supported wheels, which vary in number according to the profilograph type, carried the beam or the frame to establish a datum from which the vertical deviation of the pavement is measured. The pavement’s vertical deviation is measured using a profile wheel, usually located at the midpoint of the profilograph [
50]. California and Reinhart profilographs are the most popular types in North America [
50]. The use of profilographs to collect data at the network level is not popular [
47,
50].
Response-type equipment includes mechanical or electronic devices to evaluate pavement roughness indirectly. These equipment pieces are calibrated by correlating the measured values with standardized roughness measures. They quantify the vehicle response either mechanically (bump integrator) or using accelerometers [
52]. Response-type equipment was the primary technology for evaluating pavement roughness in the 1970s and 1980s [
18,
19,
25].
Instead of measuring the actual road profile, response-type equipment measures the vehicle response to the pavement roughness. Thus, this type of equipment is prone to various sources of bias and uncertainties, including changes in vehicle dynamics and equipment sensitivity. However, multiple benefits brought on by response-type equipment made them the most popular roughness measurement equipment for several decades. The advantages of the response-type equipment include low cost, ease of use, operation at high speed, ability to collect large amounts of data, and the ease of correlating their measures with PSI and standardized roughness values [
19]. However, they are adversely criticized because reproducibility is challenging to achieve, as the measurements are susceptible to many factors, as mentioned before. Thus, frequent and rigorous calibration was required to achieve any consistency in the collected data [
19]. Conventional response-type equipment such as Mays and Cox meters have been gradually phased out and replaced with more precise and accurate measurement technologies.
Recently, this type of technology has been revived by utilizing smartphones, vehicles with built-in sensors, and cheap accelerometers. Their application for measuring pavement roughness has been the focus of enormous research efforts [
54,
55,
56,
57,
58,
59,
60,
61].
Inertial profilers, or simply profilers, are used to measure the actual pavement profile and do not require a comparison with other equipment for calibrating the results. Instead, it is necessary to calibrate the equipment’s sensors and associated electronics and ensure the proper functioning of the computing hardware and software [
50]. Inertial profilers are essentially composed of accelerometers, height sensors, distance sensors, and computing hardware and software [
50]. Accelerometers are used to establish a reference plane from which the vertical deviation of the vehicle is measured [
50]. In the early generation of pavement roughness measurement equipment with inertial referencing systems, the road profile was defined using a wheel in contact with the pavement surface [
62]. However, in the latter generations, road profile has been established as the distance between the vehicle and the pavement surface using non-contact height sensors, which can be ultrasonic, infrared, or laser. The obtained road profile is adjusted by accounting for the vertical movement of the vehicle captured using accelerometers. The true relative profile is then used to calculate IRI by applying the quarter car simulation [
10,
63].
Inertial profilers with non-contact height sensors have become increasingly prevalent since the 1990s [
23,
27]. Among other types, laser sensors have become the primary choice in inertial profilers [
23,
26]. ASTM E950/E950M–09 [
64] classified methods for measuring pavement roughness using inertial profilers into four classes based on resolution and precision. It is worth noting that the latest version of the ASTM E950/E950M–22 [
65] did not discuss such a classification.
However, laser-based inertial profilers have some limitations, including high initial costs. Laser-based inertial profilers’ prices are much higher than response-type equipment and manually operated profilers [
52]. Moreover, they are typically inefficient at low speeds [
26,
52]. Thus, highway agencies usually set a low-speed provision for operating inertial profilers. For example, the Saskatchewan Ministry of Highways and Infrastructure (MHI) requires a minimum collection speed of 25 km/h. Similarly, North Carolina and Virginia DOT require data collection speeds greater than 24 km/h [
26].
Technology advancements in imaging systems have led to the development of automated tools capable of collecting different types of pavement condition data. The use of 3D imaging techniques instead of 2D imaging constituted a colossal leap in the development of automated systems. Three-dimensional imaging systems enable the efficient and highly accurate collection of pavement condition data. Such technology can capture as-built physical data in digital format to construct highly accurate 3D profiles of pavement [
66]. Its advantages include facilitating the evaluation of roughness at any track on the paved road. Additionally, it facilitates surveying for various pavement condition data, including roughness, rutting, cracking, and raveling [
26]. In the early 2000s, several companies developed 3D imaging systems to evaluate pavement conditions, primarily roughness and rutting. The developed systems utilized scanning lasers and reflectors to measure the reflection times across the pavement surface to establish the 3D pavement profiles [
23]. In the following years, 3D imaging systems have been integrated into automated systems developed by major vendors, including ARRB Systems (Rowville, Australia), Mandli Communications (Fitchburg, WI, USA), and Pathway Services Inc. (Broken Arrow, OK, USA).
Different 3D imaging systems were explored for a variety of motivations. Several studies [
67,
68,
69] explored using low-cost depth cameras instead of the relatively expensive laser profilers to evaluate pavement roughness. The use of 3D systems to construct the road profile for evaluating road roughness is proposed to overcome the limitations of the laser profiler at evaluating roughness at low and varying speeds [
70]. Additionally, 3D data can be used to assess other pavement condition aspects, including cracking, potholes, and patching [
68]. Additionally, such systems can be mounted on unmanned aerial vehicles (UAVs) to reduce the time, costs, and efforts for roughness data collection [
71].
Three-dimensional data can be obtained via different means, including stereography, time-of-flight measurement, and triangulation. Stereography uses 2D pictures from a moving camera or different cameras to construct 3D pavement profiles [
72]. Stereography is used in the Intel depth camera (D435i) [
69]. Time-of-flight is used in Lidars as well as Microsoft Kinect One depth camera [
67]. Triangulation is widely used in commercial profiling systems [
9].
4.2.2. Roughness Measurement Technologies in Industry Practice
The state of the practice of pavement roughness measurement technologies is concluded using two syntheses of Hicks and Mahoney [
19] and Epps and Monismith [
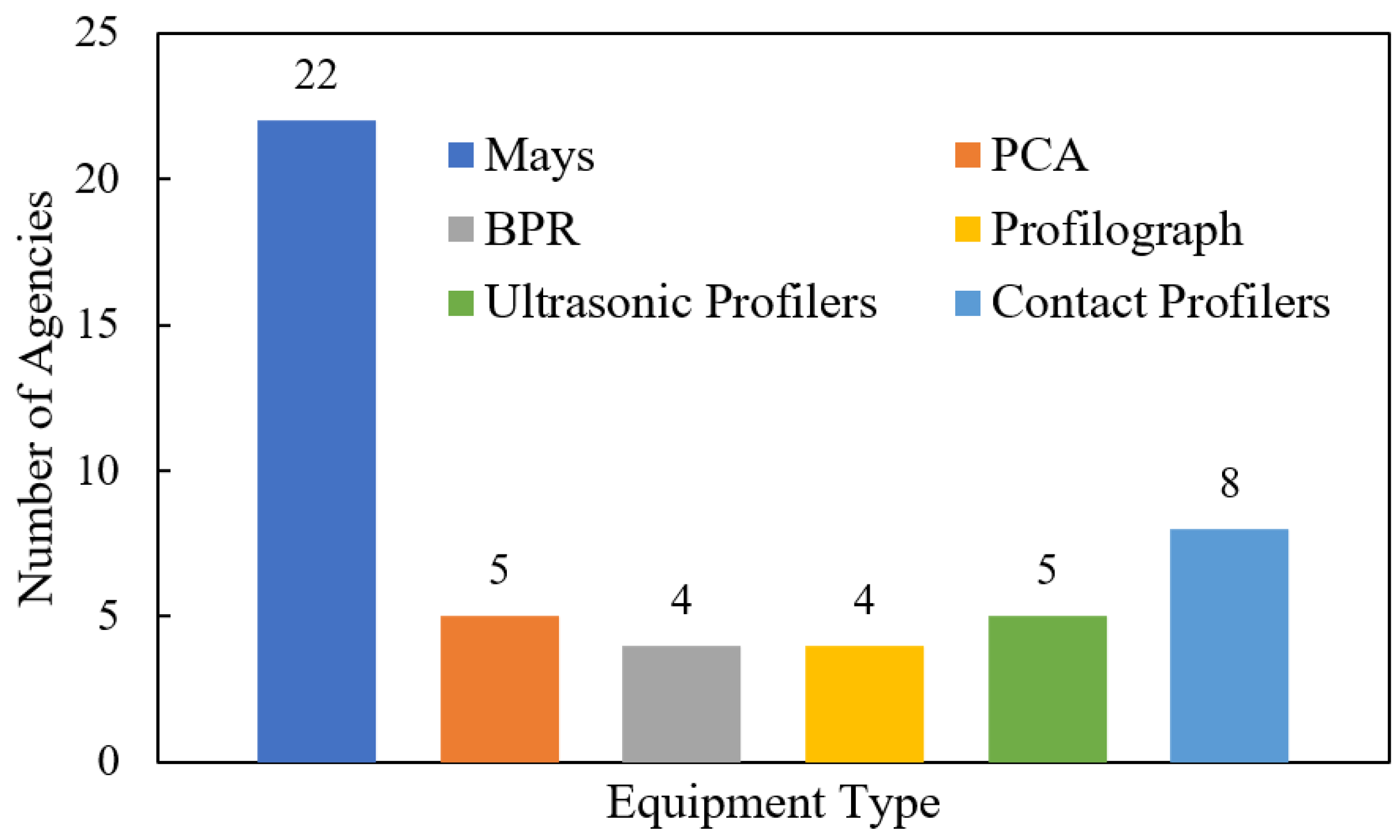
25]. The two syntheses reported the use of different pavement roughness equipment, including various response-type equipment, profilographs, contact profilers, and non-contact profilers. The number of pavement roughness measurement equipment pieces owned by surveyed agencies, as reported in the 1986 synthesis [
25], is shown in
Figure 11. However, response-type equipment was, by far, the most popular means for collecting roughness data in the mid-1980s. Equipment that performs direct profile measurement was less widespread. However, non-contact profilers were receiving considerable attention by the mid-1980s.
Hicks and Mahoney [
19] reported that seven out of the nine surveyed agencies used response-type equipment. Five years later, Epps and Monismith [
25] reported that such equipment was still the primary means of collecting pavement roughness data. As shown in
Figure 11, the majority of the agencies (22) were using the Mays meter. Other response-based equipment, such as BPR and PCA-type meters, was used by at least nine agencies.
Figure 11 shows that using profilographs and contact profilers was limited for large-scale roughness data collection surveys [
25]. The use of subjective evaluation of road roughness was seldom. Only Ontario was reported to evaluate road roughness by raters traveling over the pavement to give a subjective rating on a 0–10 scale [
25].
Hicks and Mahoney [
19] found that only the USA Army Construction Engineering Research Laboratory (CERL) used a laser profiler to evaluate the pavement roughness [
19]. However, the range and resolution of the early laser profilers were very limited. The laser profiler used by CERL was operated at a slow speed of about 5 km/h [
25]. Remarkably, Epps and Monismith [
25] reported that some agencies were already using ultrasonic profilers (5), including Cox Ultrasonic and South Dakota Profiler (SDP). The study revealed an increased interest in developing sensor-based non-contact profilers.
The study revealed that several companies, including K. J. Law Engineers (Ypsilanti, MI, USA), Cox and Sons (Colfax, CA, USA), PASCO Corporation (Tokyo, Japan), and Dynatest Consulting (Ballerup, Denmark), have developed non-contact profilers. These profilers utilize accelerometers and microprocessors, as well as ultrasonic or laser sensors. One of the significant hurdles to the widespread use of profilometers was their high price compared to conventional response-type methods. The former was reported to cost about fifteen times more than the latter [
23].
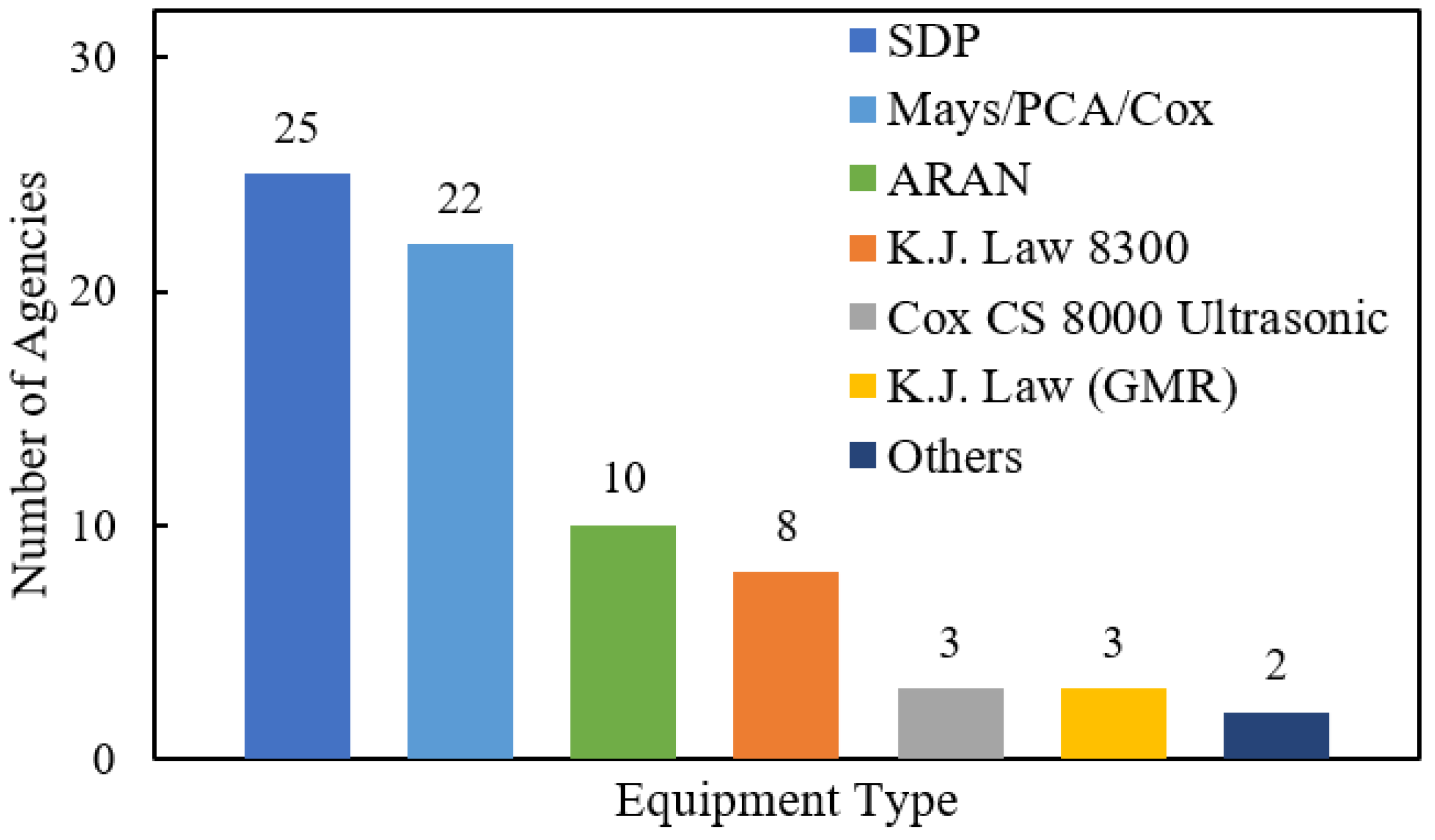
Figure 12 displays the number of pavement roughness measurement equipment pieces owned by surveyed agencies, as reported in the 1994 synthesis [
27]. The response-type equipment was still quite popular. A remarkable finding of the 1994 synthesis [
27] was the surge in using non-contact profilers.
As shown in
Figure 12, Mays, PCA, and Cox ride meters were used by twenty-two agencies. Additionally, ten agencies were using ARAN response-type equipment. The use of contact profilers was limited. Only three agencies were found to use the early contact profiler of GMR. Although the synthesis did not indicate the use of profilographs for the large-scale collection of roughness data, it was noted that many agencies owned and used them for calibration and project-level data collection [
27,
50].
As shown in
Figure 12, twenty-five agencies used SDP. SDP was developed in the early eighties by the South Dakota Department of Transportation. It consists of three subsystems to collect vehicle displacement using accelerometers, vehicle height using ultrasonic sensors, and vehicle distance [
63]. Other non-contact profilers included K. J. Law 8300 and Cox CS 8000 Ultrasonic. Ultrasonic-based profilers were the most common in the eighties and early nineties. K. J. Law Model 8300 profiler was among the newer generation equipment where optical sensors replaced ultrasonic sensors.
The era of non-contact profilers was evident, with many agencies transitioning from response-type equipment to non-contact profilers. Up to ten agencies reported using more than one type of equipment. For example, Pennsylvania, Oklahoma, and South Carolina were using SDP in addition to the Mays ride meter. Similarly, West Virginia and Ohio were using the K.J. Law non-contact profilers alongside the Mays profiler [
27].
The 2004 synthesis indicated that all the surveyed agencies had transitioned to non-contact profiling equipment. The equipment utilized one of three types of height sensors: lasers, acoustics, or infrared. Of the 51 agencies that reported the type of technology used in their profilers, the majority (86%) used laser-based profilers. Laser sensors enable data collection at intervals of 25 mm or less, at speeds of approximately 96 km/h [
23]. Other sensors of acoustics and infrared were less popular, with only three agencies reporting using acoustic sensors, and four reporting using infrared sensors. This shift in sensor technology is significant compared to the previous synthesis [
27], conducted ten years earlier, where most non-contact profilers comprised acoustic sensors. Laser-based profilers continued to gain popularity, while the use of acoustics and infrared sensors was entirely marginalized by the 2009 synthesis [
37].
The development of 3D imaging systems capable of measuring pavement roughness was noted in the 2004 synthesis [
23]. At least two companies (Phoenix Scientific Inc. (San Marcos, CA, USA) and GIE Technologies Inc. (New York, NY, USA)) have reported the development of laser-based 3D imaging systems for collecting pavement roughness and rutting data [
23]. The interest in 3D profiling systems experienced a continuous rise in the following years.
The use of laser-based systems to collect roughness data has been increasingly prevalent in North America and other parts of the world. Pierce and Weitzel [
26] and Pierce and Stolte [
2] indicated the popularity of laser-based systems for collecting roughness data. The systems used include point laser profilers and 3D profiling systems. The latter systems were hailed for collecting high-resolution continuous profiles to construct the pavement profile. They can obtain 2D data by capturing the intensity of reflected light and 3D data by capturing the range or depth [
26]. The 3D profiling systems are increasingly used to develop fully automated pavement inspection systems. They facilitate surveying for multiple pavement condition data, including roughness, rutting, cracking, and faulting [
2,
26]. However, Pierce and Weitzel [
26] concluded that additional research efforts are necessary to validate the accuracy and repeatability of the 3D profiling systems for measuring road roughness. The synthesis marked the need for a standardized method for calculating IRI using 3D profiling systems.
4.2.3. Roughness Measurement Technologies in Journal Articles
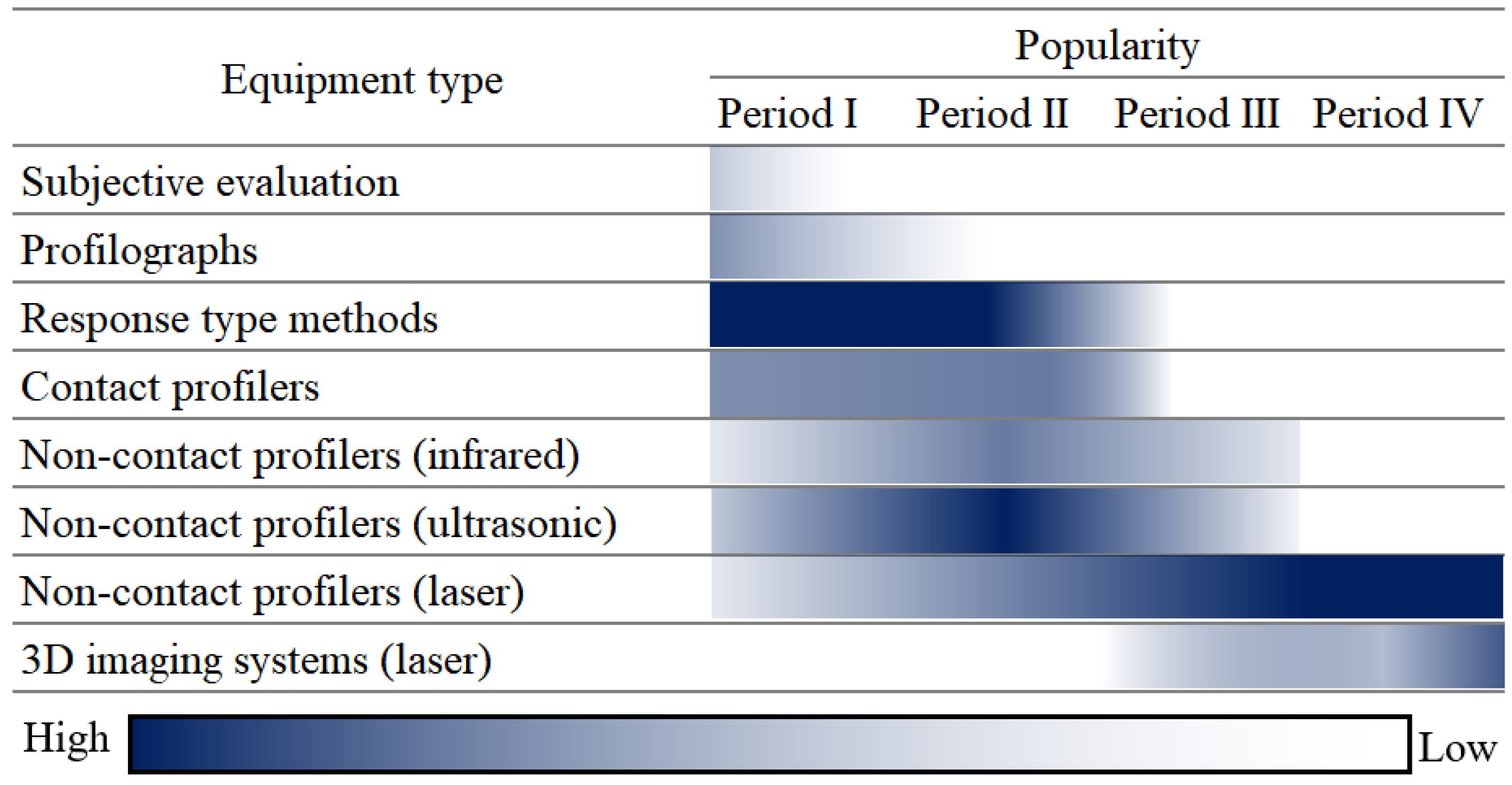
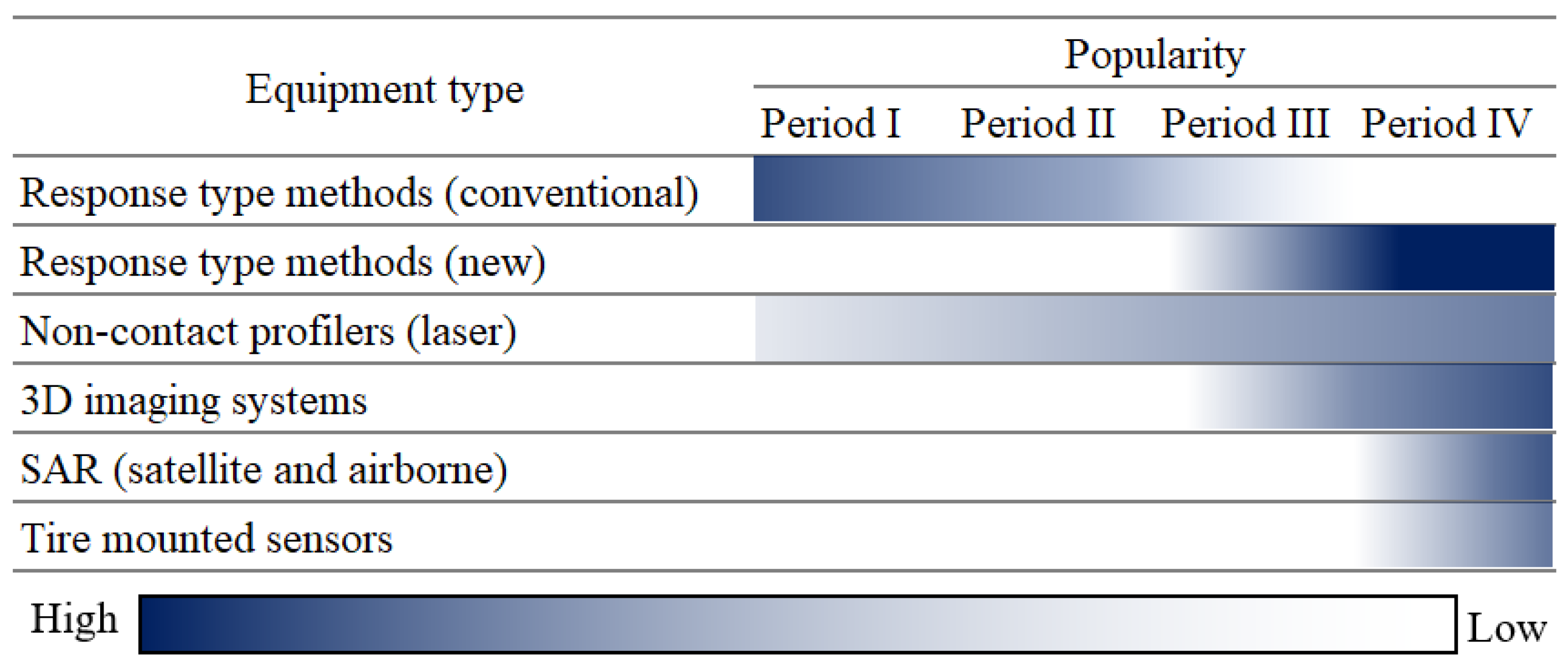
Different technologies have been explored for pavement roughness measurement in the last few decades.
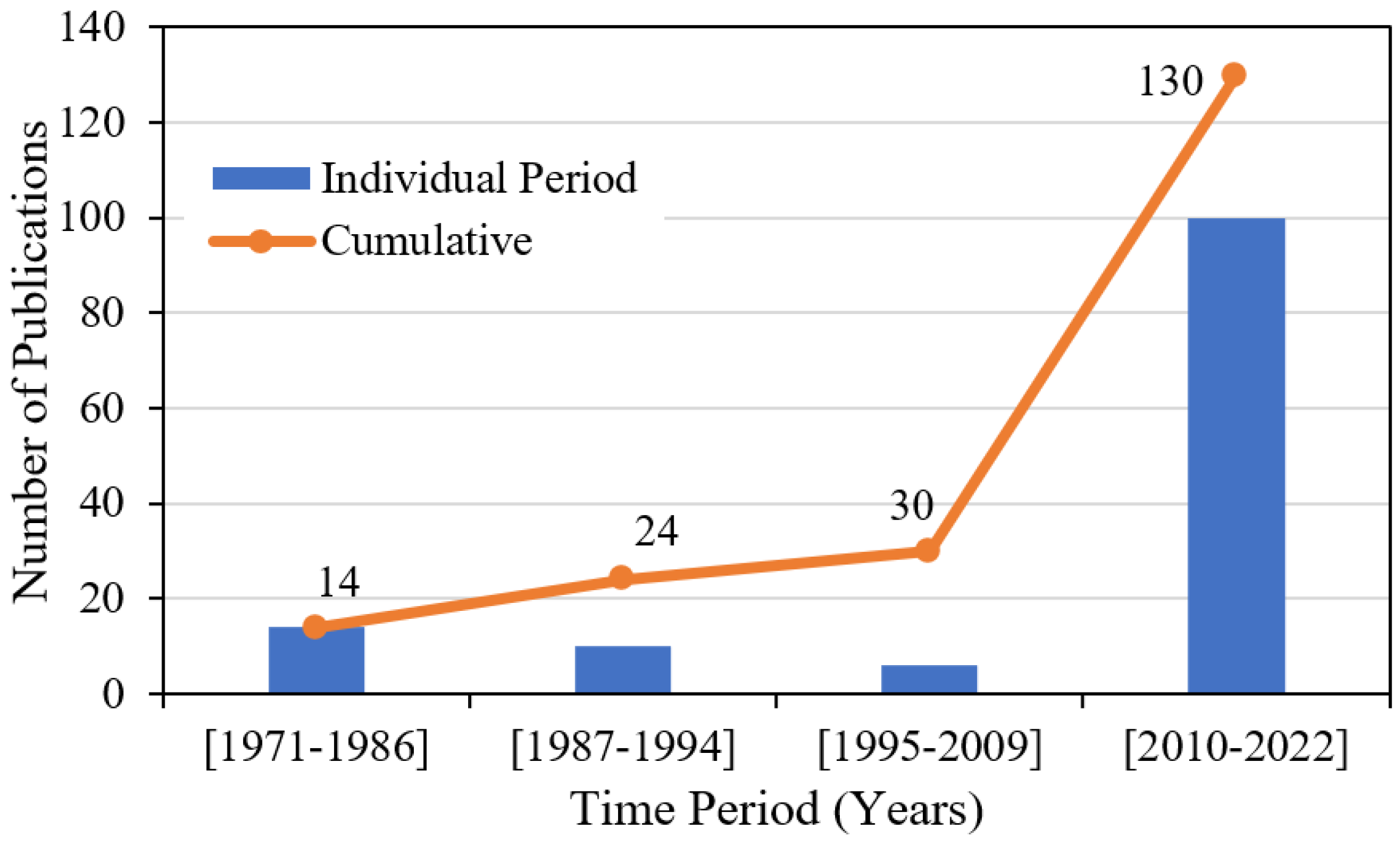
Figure 13 shows the popularity of different roughness measurement technologies among the research community throughout the four studied periods. During the 1980s and the early 1990s, most of the research efforts focused on conventional response-type methods. During the following decades, more diverse technologies were investigated. Research exploring response-type techniques was revived, but using new sensing tools, i.e., smartphones, vehicles’ built-in sensors, and cheap mounted sensors. Laser-based profiling equipment was continually explored, though not as a leading research direction. Three-dimensional imaging systems have been explored during the third period. However, they have only become a trending research topic in recent years. Recently, tire-mounted sensors as well as satellite and airborne synthetic aperture radar (SAR) images have been increasingly investigated.
A total of fourteen articles published between 1971 and 1986 focused on studying, developing, calibrating, and comparing different ride quality and roughness measurement methods were analyzed. Eleven of the fourteen retrieved articles were published between 1983 and 1986, indicating a noticeable interest in pavement roughness measurement by the research community in the mid-1980s.
Table 6 presents the used roughness measurement methods. As explained in
Table 6, most studies (10) focused on response-based equipment, particularly the Mays meter. The same trend of using response-type equipment (Mays meter and a fifth wheel bump integrator) was also vivid in the industry. Some studies experimented with non-contact profilers [
73,
74].
Ten research articles were retrieved in the period that extends between the two syntheses of [
25,
27]. Eight of the ten articles were published between 1987 and 1989. This indicates a relatively high interest in developing, calibrating, and correlating different equipment and approaches for measuring pavement roughness in the 1980s compared to the early 1990s.
Table 7 summarizes the used roughness measurement approach in articles published in study period II.
Reflecting the industry’s state of the practice at the time, most articles (6) focused on response-type equipment. About a third of the articles addressed the calibration of response-type equipment. Two articles reviewed the non-contact profilers of SDP [
63] and PRORUT [
75]. The correlation of profilographs [
76] and Mays meter [
77] measurements with ride quality was also addressed. The use of non-contact profilers, including the K.J. Law profiler, to calibrate the Mays meter was also investigated [
78]. Only one study suggested a new hardware development by developing a response-type equipment using a transducer only to simplify the device [
79]. Noticeably, Huft et al. [
63] reported a study of testing and improving the SDP in collaboration with the South Dakota Department of Transportation.
Little research output (six articles) was retrieved on investigating, development, and correlation of pavement roughness equipment between 1995 and 2009.
Table 8 presents the various roughness measurement approaches explored in the analyzed articles. Three articles were published between 1995 and 2004. Lenngren [
80] reported the successful experience of The Royal Swedish Fortifications Administration in using a laser-based system called Laser Road Surface Tester (LRST) to measure the roughness of airfield pavement. Another study investigated a response-type system named DYNVIA [
81]. Ahlin et al. [
82] compared the pavement roughness measured using a laser-based profiler, which measured based on truck wheel vibration using accelerometers [
82].
Between 2006 and 2008, three articles were also retrieved. Chang et al. [
66] conducted their investigation using a 3D laser scanner for obtaining road profiles. The new approach was compared with an inertial profiler (Multiple Laser Profiler), as well as rod and level. Roughness measures obtained based on the 3D laser scanner and the multiple laser profiler were found to be highly correlated. Chen et al. [
83] studied the harmonization of an inertial profiler and a three-meter straight edge. González et al. [
39] attached an accelerometer to a vehicle to evaluate pavement roughness. The use of attached accelerometers or those available in vehicles and smartphones will significantly surge in the following years.
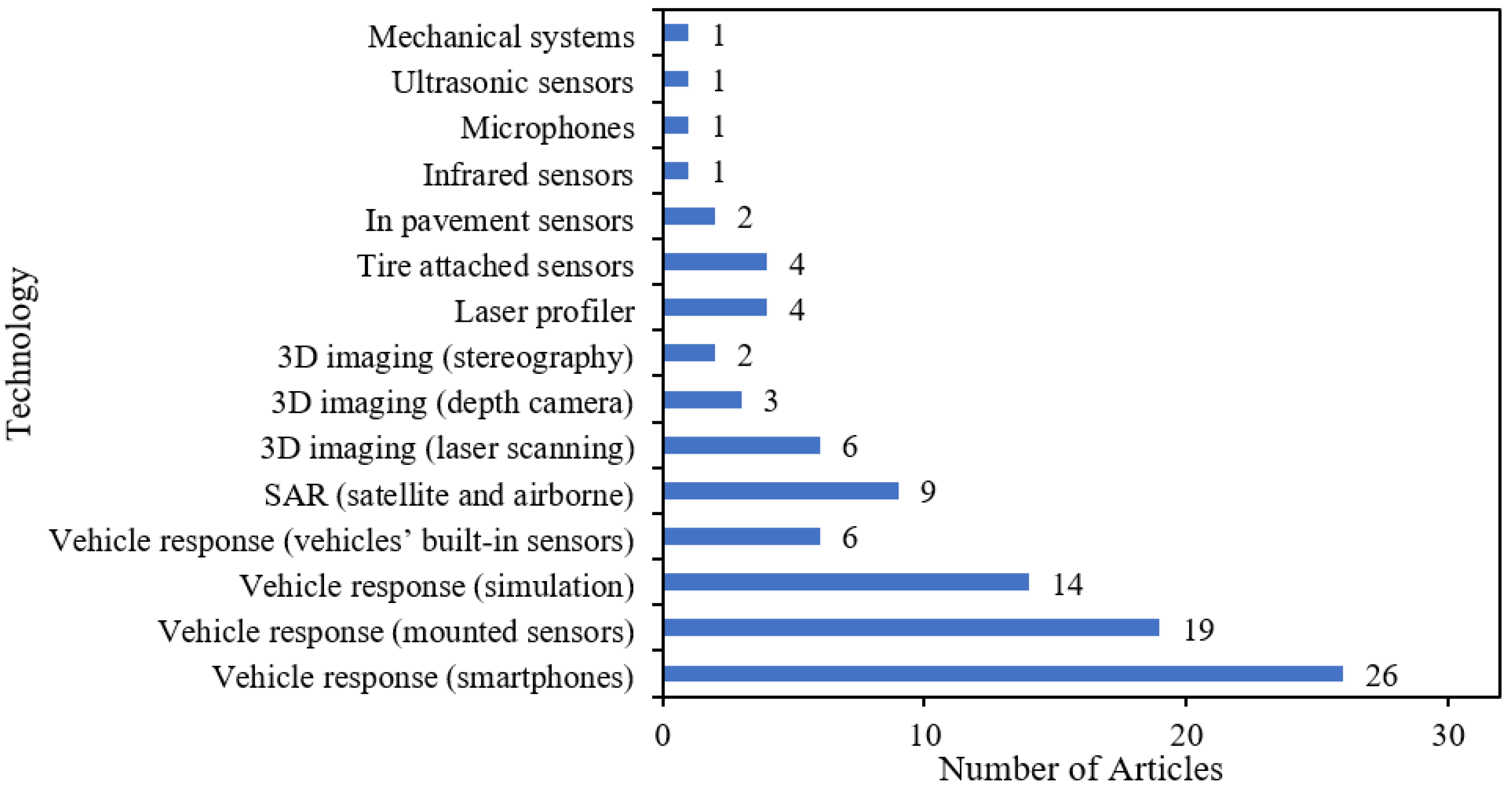
There has been a remarkable surge in research exploring alternative pavement roughness measurement approaches in the past few years. Of the 130 retrieved articles, 100 were published between 2010 and 2022. These articles mainly focused on developing new approaches to increase cost-effectiveness, meet the growing demand for collecting roughness data from new industries, and leverage technological advancements and trends, such as crowdsourcing.
Figure 14 shows the various approaches explored for measuring pavement roughness. As depicted in the figure, researchers have explored a diverse range of technologies for this purpose. However, utilizing measured vehicle response through smartphones, vehicles’ built-in sensors, and mounted sensors has emerged as the most prominent trend. These techniques are comparable to the conventional World Bank Class III roughness measurement equipment [
84].
The central theme of research in this period is the use of accelerometers to measure vehicle response for pavement roughness evaluation. The acceleration signals are collected using smartphones, mounted sensors, and vehicles’ built-in sensors or simulated using special software. Most of the studies utilized four-wheeled vehicles to collect smartphone acceleration data. The most commonly used vehicles are passenger vehicles (PV), such as sedans, compact cars, sport utility vehicles, and pick-up trucks [
56,
84,
85,
86,
87]. Some studies considered buses [
88], whereas other studies used a combination of PV and buses [
89] as well as PV and heavy-duty trucks (HDT) [
90,
91]. Only a few studies considered using two-wheeled vehicles of cycles [
41] and motorcycles [
57].
Smartphones have been increasingly explored as a cost-effective tool for evaluating pavement roughness. The capabilities of smartphones and their widespread use make them an attractive solution. Smartphones are equipped with a variety of sensors, including GPS and accelerometers. The smartphones’ built-in sensors can be leveraged to collect data required for pavement roughness evaluation. Additionally, smartphones support the transference of the collected data readily through Wi-Fi or mobile data. Furthermore, the use of smartphones for data collection is handy and does not require specialized personnel.
Smartphones measure roughness based on the vehicle response rather than the direct pavement profile. Thus, multiple variables can affect the collected data, including the smartphone type, vehicle model, driving velocity, mounting arrangement, and sampling frequency.
Table 9 lists the studies that explored the effect of the main factors affecting pavement roughness evaluation using smartphones.
Smartphones measure acceleration using the embedded micro-electromechanical systems inertial motion unit (MEMS IMU). Thus, the measured acceleration is expected to vary depending on the embedded MEMS IMU. Different smartphones have MEMS IMU with distinct hardware, antenna size, and installation location. For example, variation in the embedded accelerometers can affect the reliability of the data and bias the measured roughness. Accelerometers with a resolution of 10 mm/s
2 introduce double the inherent noise compared to that having a resolution of 1 mm/s
2 [
56]. The effects of smartphone type on pavement roughness measurement have been widely studied, with multiple studies reporting a significant impact [
56,
85,
90,
93,
94,
95]. For example, Zhang et al. [
92] reported a relative error of up to 11%, which they considered tolerable.
Variations in the vehicles’ dynamic systems lead to differences in the filtering of vibration caused by road roughness [
95]. Most studies reported a significant impact of vehicle model variation on the measured pavement roughness [
85,
89,
90,
94,
95,
96]. For example, Hanson et al. [
94] reported that the difference between the measured IRI and the reference value varied from 5.4% to −11.9% when measured using a compact car (2001 Pontiac Sunfire) and a sport utility vehicle (2011 Nissan Rogue), respectively. However, Botshekan et al. [
97] indicated that well-trained machine learning models could be used for different types of vehicles. Additionally, Jeong et al. [
102] suggested that the use of gyration (i.e., angular velocity) can minimize the effect of vehicle model variation.
Vehicle speed was reported to have a remarkable effect in the majority of the studies [
55,
89,
90,
95,
98,
99]. It was remarked that higher speed results in an increased excitation in the vehicle suspension. Thus greater amplitude and acceleration are observed [
95]. For example, Bisconsini et al. [
95] experimented with speeds of 40, 60, and 80 km/h as well as a speed varying between 30 and 120 km/h. The study reported the lowest correlation between the smartphone-based and reference roughness measures (R
2 = 0.65) at varying speeds. The highest correlation (R
2 = 0.86) was found at a 60 km/h speed. However, it is crucial to indicate that effect of the speed variation depends on several factors, including the range of speed variation, the types of wavelengths present in the pavement profile, and the vehicle’s dynamic system [
94,
95]. However, Hanson et al. [
94] reported a limited impact of speed change from 50 to 80 km/h in their study. Additionally, Botshekan et al. [
97] reported a lower impact of speed variation for larger-scale surveys.
The ideal scenario is to collect the chassis response directly. However, this is not practical when using smartphones. Moreover, the mounting arrangement may differ significantly under normal usage conditions when using smartphones as a crowdsourcing tool. The mounting arrangement was found to have a considerable effect on the measured roughness [
55,
89,
90,
94]. For example, Hanson et al. [
94] found that the vent mounting arrangement increased the relative error of the measured roughness to about 86% compared to 1% for the best performing arrangement of windshield mounting. However, Bisconsini et al. [
95] concluded a limited impact of the mounting arrangement. In general, a rigid mounting arrangement is preferable to acquire the chassis vibration as accurately as possible [
95,
97].
The sampling frequency is another important factor that can affect the evaluation of pavement roughness. A higher sampling frequency is better for improving the signal quality as well as the consistency and reliability of the results [
56,
93,
101]. Some studies used sampling rates as high as 400 Hz [
56], whereas others explored sampling rates as low as 16 Hz [
57]. Multiple studies used a sampling frequency of 100 Hz [
41,
99,
102]. Alatoom and Obaidat [
55] investigated four sampling rates of 25, 50, 100, and 200 Hz. The best performance was reported as the highest sampling rate of 200 Hz. Additionally, Zeng et al. [
101] indicated that fewer runs are required to achieve results at a tolerance error rate of 10% at an acceptance confidence level of 95% at a higher sampling rate. Bridgelall [
100] reported a similar trend after comparing eight sampling rates.
Results inconsistency in using smartphones is a major limitation [
92]. To improve the accuracy and consistency of the results, Opara et al. [
103] and Zhang [
92] suggested averaging the IRI values calculated using different smartphones. Moreover, it was frequently reported that increasing the number of samples helps overcome this limitation. Bisconsini et al. [
95] illustrated that increasing the number of traversals from five to ten reduced the coefficient of variation from 10–20% to 4–9%. Bridgelall [
88] reported that using 30 traversals from 18 buses reduced the margin of error to less than 6%. Similarly, Ahmed et al. [
93] suggested having 24 and 35 traversals for paved and unpaved roads, respectively. Medina et al. [
90] indicated the need for 50 to 60 traversals. Improving consistency can be achieved by utilizing smartphones as a crowdsourcing tool. In fact, several articles promoted the use of smartphones as crowdsourcing tools and suggested analyzing a combination of data from different sources [
57,
90,
91].
Two articles developed ML models to predict road roughness using signals obtained using smartphones. Jeong et al. [
102] developed a CNN model to calculate IRI using images representing the raw time–history measurement of the vehicle response. Gamage [
104] developed an extreme gradient boosting to calculate IRI using features describing the obtained signal: the mean, maximum, and standard deviation of acceleration signals, the number of spikes in x, y, and z directions, as well as the average speed of the vehicle.
Mounted accelerometers that constitute a more similar approach to the early response-type methods have been investigated in combination with different types of sensors. Many studies have explored using accelerometers mounted to vehicles to measure pavement roughness. Attached accelerometers can better acquire the vibrations of vehicles’ chassis by reducing the variability caused due to smartphone mounting. However, compared to smartphones, their use is more challenging due to the need for additional sensors such as GPS and special arrangements to collect, store and transfer the data.
Nineteen articles published during the fourth study period were analyzed. Most studies used field tests for data collection and validation, whereas only two used testbeds. Some studies used simulated data alongside real field testing [
105,
106,
107]. Additionally, most of the studies explored the effect of vehicle speed, whereas only a few articles investigated the impact of vehicle type, mounting arrangement, and sampling rate on the measured roughness, as presented in
Table 10.
Similar to the discussion made for smartphones, speed was reported to have a significant impact on the measured pavement roughness [
44,
61,
106,
107,
108,
109,
110]. It was noted that the higher the speed, the greater the excitation of the vehicle’s suspension, resulting in signal amplification [
61]. For example, Chen and Xue [
107] developed a road roughness level identification model based on the BiGRU network. The model’s overall accuracy dropped drastically from about 95% to less than 30% when tested on data collected at speeds of 20 and 80 km/h, respectively. However, Li et al. [
111] utilized the inverse pseudo-excitation method (IPEM) to calculate IRI by measuring vehicle suspension. Li et al. [
111] reported limited variation of measured roughness due to speed variation (40–120 km/h) using his model. Moreover, some publications suggested corrections of the measured acceleration or roughness considering the variation in speed [
51,
112].
Li et al. [
111] reported a significant impact of the vehicle type on measured roughness. Mounting arrangement and sampling rates were reported to impact the measured roughness as well. Li et al. [
108] reported a significant increase when lowering the sampling frequency. The absolute error doubled when the sampling frequency was downgraded from 200 to 25 Hz. The use of sampling rates lower than 100 Hz was discouraged to avoid unreliable results [
108]. Chou et al. [
61] found that placing the sensor on the dashboard gave better results compared to the floor of the passenger seat and the floor of the central seat.
Table 10.
Major studied attributes affecting pavement roughness evaluation using attached accelerometers.
Table 10.
Major studied attributes affecting pavement roughness evaluation using attached accelerometers.
Chen and Xue [
107] developed an ML model using a bidirectional gated recurrent unit (BiGRU) network. The model used the acceleration of the vehicle as well as the wheel to classify the roughness level of the road. Liu et al. [
105] developed an improved restricted Boltzmann machine deep neural network algorithm based on the Adaboost Backward Propagation algorithm. The input of the model was the vehicle acceleration and pitch acceleration, whereas the output was the road roughness class.
Built-in sensors available in connected cars are one of the promising approaches to evaluating pavement roughness [
114]. It offers an alternative to using specially equipped vehicles and skilled technicians. Compared to smartphones, it minimizes the number of variables affecting the collected signal, particularly eliminating the variability of smartphone type and mounting arrangement. In addition, it allows for the utilization the known information of the vehicle type. Six studies explored the possibility of using vehicles’ built-in sensors for pavement roughness measurement [
45,
54,
58,
59,
115,
116]. Most studies used simulated data in addition to the data collected from vehicles’ built-in sensors [
45,
58,
59,
115]. Mahlberg et al. [
54] explored the pertinence of using crowdsourced data from connected vehicles for pavement roughness evaluation. Moreover, Liu et al. [
45] demonstrated the applicability of using crowdsourcing and semi-supervised learning to evaluate pavement roughness.
Nitsche et al. [
115] developed three models using ANN, SVM, and random forests to predict road roughness. Thirty-five features derived utilizing the output of the vehicle response simulation were used to calculate the weighted longitudinal profile. The random forests model was reported to demonstrate the best performance. Interestingly, Liu et al. [
45] developed a semi-supervised learning model to work with data coming from vehicles of known types. The model utilizes a set of data obtained for roads of known roughness and unknown vehicle type and a smaller set of data from known vehicles passing over roads of known roughness. The model can work to predict both the vehicle parameters for vehicles of unknown type and the roughness.
Simulated acceleration data representing vehicle vibration due to surface irregularities that has been investigated to assess pavement roughness. Thirteen studies used simulated acceleration data exclusively to develop and test road roughness evaluation. Multiple studies used specialized simulation software, including ADAMS software (2) and CarSim (1). They were used to simulate the interaction between pavement and vehicles. Most studies (9) implemented their models using MATLAB software. Studies developed simulation models of different degrees of freedom (DOF), including two (6), three, six, and nine (1), four (3), and seven (3).
Seven articles used ML algorithms in their studies. Types, input, and output of the used ML models are shown in
Table 11. As presented in
Table 11, different variations of the neural network were used in the seven studies. Wang et al. [
117] found that the performance of ANN was comparable to the random forest and better than that of the decision regression tree. Most of the articles developed supervised ML regression models. Five articles developed ML models to predict quantitative values of pavement roughness. One article developed an ML model to classify pavement roughness, considering five roughness classes. Additionally, one study developed both classification and regression ML models. Inputs of the different ML include features describing vehicle suspension, including vertical acceleration. Wang et al. [
117] demonstrated the importance of including additional features, including vehicle type and speed, to boost the models’ performance.
Multiple studies have used 3D imaging systems for pavement roughness measurement. Different 3D imaging systems were explored considering one of the three main motives: cost reduction, operation at varying speeds, and development of integrated systems to collect various condition data in addition to roughness. Several studies [
35,
36,
113] explored using low-cost depth cameras instead of the relatively expensive laser profilers to evaluate pavement roughness. The use of 3D systems to construct the road profile for evaluating road roughness is proposed to overcome the limitations of laser profiler at evaluating roughness at low and varying speeds [
114]. Additionally, 3D data can be used to assess other pavement condition aspects, including cracking, potholes, and patching [
113]. Additionally, such systems can be mounted on unmanned aerial vehicles (UAVs) to reduce the time, costs, and efforts required for roughness data collection [
115].
Depth cameras were used in three studies published between 2015 and 2022 for assessing pavement roughness. Specifications of the used depth cameras are presented in
Table 12. As presented in
Table 12, the Intel depth camera (D435i) utilizes stereoscopic technology using imagers, whereas the Microsoft Kinect One utilizes time-of-flight technology using an infrared sensor and a camera. Aleadelat et al. [
69] utilized a low-cost Intel depth camera (D435i (Intel RealSense, California, USA)) to evaluate pavement roughness. After scanning road pavement, a depth stream was extracted. Subsequently, the depth stream was filtered to generate the road profile to ultimately evaluate pavement roughness as IRI values. The proposed approach successfully classified 76% of the tested road segments into the correct road performance category as per the FHWA IRI threshold. Mahmoudzadeh et al. [
68] and Khalifeh et al. [
67] used RGB-D sensors (Microsoft Kinect One (Microsoft Corporation, Redmond, WA, USA)) to capture 3D images. The developed technology was reported cost-effectively with good precision and accuracy. However, the vertical measurement resolution of both camera cameras is larger than 0.01 mm [
69,
121]. Thus, both are comparable to class 4 profilers, according to ASTM E1950-2018 [
64,
69].
Laser-based 3D imaging systems were also used for pavement roughness measurement. Tran and Taweep [
122] and Kumar et al. [
123] used mobile laser scanner (MLS) systems to construct 3D point-cloud data along the road. The main components of the GT–4 and XP-1 systems used by Tran and Taweep [
122] and Kumar et al. [
123], respectively, are presented in
Table 13. GT–4 MLS system was developed by Aero Asahi Corporation (Tokyo, Japan), whereas the XP-1 MLS system was produced at the National University of Ireland Maynooth (NUIM) [
122,
123]. Both systems include laser scanners, GPS units, and cameras. The systems can be mounted on vehicles and support data collection at different speeds. Tran and Taweep [
122] reported collecting data at an average 50 km/h speed. The developed approaches were reported to be able to evaluate pavement roughness with high accuracy. It can also be used to calculate the roughness at any track on the road. However, this approach is more data-intensive compared to conventional point laser profilers.
Additionally, stationary laser scanners were used to obtain 3D point cloud to evaluate pavement roughness. Alhasan et al. [
125] used a Trimble CX 3D STLS system to assess the pavement roughness of two pavement sections of only 105 m. Although both studies illustrated the ability of stationary laser scanners to accurately evaluate pavement roughness, their use is not practical for large-scale data collection programs.
Other studies used line laser sensors to develop 3D imaging of pavement surfaces for roughness evaluation. Lee et al. [
126] and Guo et al. [
70] developed line laser-based systems to obtain the 3D profile of pavement surface to measure road roughness. Both systems include two laser scanners. Other sensors and tools are used, including cameras and DMI units (for spatial referencing). The proposed systems were claimed to support roughness measurement at low and varying speeds with high accuracy. Lee et al. [
126] reported that the system is reliable for unpaved roads.
Abohamer et al. [
127] evaluated pavement roughness by employing ANN and multinomial logistic (MNL) regression models and classified pavement sections into different roughness categories based on 3D images. Additionally, a convolutional neural network (CNN) was used to predict IRI. The study used 3D images obtained from Louisiana Dot and Development (LaDOTD) pavement management system (PMS) inventory. Compared with IRI values from the inertial profiler, the CNN model predicted IRI with a coefficient of determination (R
2) of 0.985 and an average error of 5.9%.
Stereography was used by multiple studies to generate 3D images of pavement profiles for roughness evaluation using 2D cameras. Botha and Schalk [
128] used two low-cost cameras and an inexpensive inertial navigation system (SPAN-CPT) to construct road profiles for roughness evaluation. Prosser-Contreras et al. [
71] developed a system that constitutes a camera and GPS unit mounted on a UAV to evaluate pavement roughness. The method was found to be cost and time efficient. However, it suffers from multiple limitations that necessitate further research. One limitation is the requirement to have the road be traffic-free. Another limitation is the vulnerability of the data quality to the weather and lighting quality.
The use of SAR technology for evaluating pavement roughness has been the focus of multiple studies [
24,
129,
130,
131,
132,
133,
134,
135]. SAR data from X-band [
132,
133,
134,
135], L-band [
24,
131], and C-band [
130] was investigated for pavement roughness estimation. The data were collected using various satellites such as Sentinel-1 [
24,
130], Sentinel-2 [
132], Cosmo-SkyMed [
129], and Advanced Land Observing Satellite (ALOS) [
131]. Moreover, different ML algorithms were utilized to evaluate pavement roughness. Fiorentini [
24] explored various ML models to evaluate roughness and concluded the superiority of SVM. Bashar and Torres-Machi [
130] applied deep learning to estimate the IRI. The developed model predicted IRI values with a mean absolute error of about 0.23 m/km (14.6 in/mile). Karimzadeh and Matsuoka [
134] used the SAR backscattering values to assess IRI. The study reported a loose correlation with the reference values obtained using BumpRecorder software (BumpRecorder Co., Ltd., Tokyo, Japan) and a smartphone. However, multiple studies developed models to classify the roads based on their roughness. Karimzadeh and Matsuoka [
132] suggested a qualitative assessment instead of quantifying pavement roughness due to insufficient image resolution. Karimzadeh and Matsuoka [
132], Suanpaga et al. [
131], and Meyer et al. [
129] classified roads into two classes; roads with good and bad roughness.
Satellite data offer wide-scale coverage, which can minimize the time and cost required for pavement roughness evaluation. However, the applicability of using satellite data for pavement roughness evaluation is still debatable at the current stage. Thus, more research is required before assuming the robustness of this technology with the low-resolution publicly available satellite images. Alternatively, Babu et al. [
133] and Rischioni et al. [
135] used high-resolution airborne polarimetric SAR images to evaluate pavement roughness. The two studies utilized DLR’s airborne radar sensor F-SAR to acquire fully polarimetric X-band datasets. The estimated roughness was highly correlated with reference values obtained using a handheld laser scanner. The proposed method sounds more robust compared to satellite SAR-based approaches.
Few studies explored attaching sensors to vehicle tires to measure pavement roughness. (Zeng et al. [
136] estimated the IRI using a tire pressure sensor. The study employed a combination of ideal gas low and elastic contact models to derive a nonlinear relationship between tire pressure and contact force. The results indicate reliable IRI values, especially at low vehicle speeds, can be obtained. Zhao et al. [
137] and Zhao and Wang [
138] developed a new method based on dynamic pressure sensors and axle accelerometers to evaluate pavement roughness. The measured IRI values were comparable with those obtained using a laser profiler. Differently, Yang et al. [
139] employed machine learning algorithms to classify road roughness levels based on data collected using an intelligent tire system with a piezoelectric cable. The layout of the piezoelectric cable was optimized using a finite element model.
Other technologies have been explored for measuring pavement roughness, such as mechanical profilers [
140] and directional microphones (acoustic-based method). Becker and Els [
140] developed a mechanical profiler called Can-Can Profilometer that was suggested to be useful for obtaining 3D data for research purposes. Additionally, Zhao et al. [
141] developed an acoustic-based method that utilizes five directional microphones mounted on a vehicle to evaluate road roughness. The study developed an algorithm to assess pavement roughness based on the principle that higher sound pressure is associated with higher pavement roughness. However, the robustness of the model is questionable as the used algorithm was built using roughness data less than 2 m/km.
In-pavement strain sensors (optical fiber sensors) have been explored on a limited scope through laboratory and limited field experiments for pavement monitoring [
142], including roughness evaluation [
42,
143]. While the technology has shown considerable potential, its practicality remains questionable due to the need for optical fiber infrastructures. The implementation of such infrastructures can be costly, and it may not be practical for many pavement monitoring applications, especially in remote or hard-to-reach areas. Nonetheless, the technology remains a promising avenue for future research and development, and ongoing efforts are being made to improve its practicality and cost-effectiveness.
Infrared sensors and ultrasonic sensors are cost-effective methods that hold potential for small agencies with limited resources. These sensors have shown promise in various pavement monitoring applications, including roughness evaluation, and can offer an affordable alternative to more expensive measurement technologies. While they may not provide the same level of accuracy as higher-end sensors, they can still offer valuable insights into pavement condition and can be a useful tool for smaller agencies looking to prioritize maintenance and rehabilitation efforts.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















