
Automated VIIRS Boat Detection Based on Machine Learning and Its Application to Monitoring Fisheries in the East China Sea

Abstract
1. Introduction
2. Materials and Methods
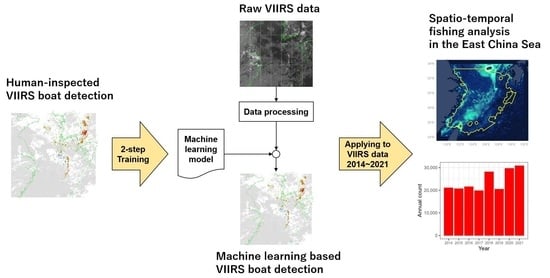
2.1. Overview of the Machine Learning Model
2.2. Data
2.2.1. Raw VIIRS Data
2.2.2. VIIRS Boat Detection Data
2.2.3. On-Ship Radar Data
2.3. Development of the Machine Learning Model
2.3.1. Preprocessing
2.3.2. Creating Features for Detection
- Log10 (DNB radiance)
- Spike median index (using 3 × 3, 5 × 5, 7 × 7, 9 × 9 surrounding pixels)
- Spike height index (using 3 × 3 surrounding pixels)
- Maximum integer cloud mask (using 3 × 3, 5 × 5, 7 × 7, 9 × 9 surrounding pixels)
- Moon illumination
- Zenith angle of the satellite
- Zenith angle of the moon
- Zenith angle of the sun
Spike Median Index
Maximum Integer Cloud Mask
Moon Illumination
Zenith Angles of Satellite, Moon, and Sun
Objective Variable
Extracting Local Maximum Pixels
2.3.3. Modeling Design
Splitting Train/Test Set
The Machine Learning Algorithm
Creating the Training Data for the Baseline Model
- Extract negative pixels whose log10 (radiance) is greater than [min{log10 (radiance of positive pixels)} − 1].
- Divide the range of radiance of the extracted negative pixels into 10 classes evenly on the log scale.
- Randomly sample negative pixels without replacement evenly from these 10 radiance classes until the total number of sampled negative pixels reaches 20,000 pixels.
Creating the Training Data for the Production Model
Hyperparameter Setting
2.4. Evaluation of VBD with On-Ship Radar Data
2.4.1. Extracting VIIRS Detections within Radar Range
2.4.2. Distance Threshold for Matching VBD and On-Ship Radar Data
2.4.3. Selection of On-Ship Radar Data Used for Evaluation
2.4.4. Metrics to Evaluate the Detection Performance of VBD Algorithms
2.5. VBD Data Analysis in the East China Sea
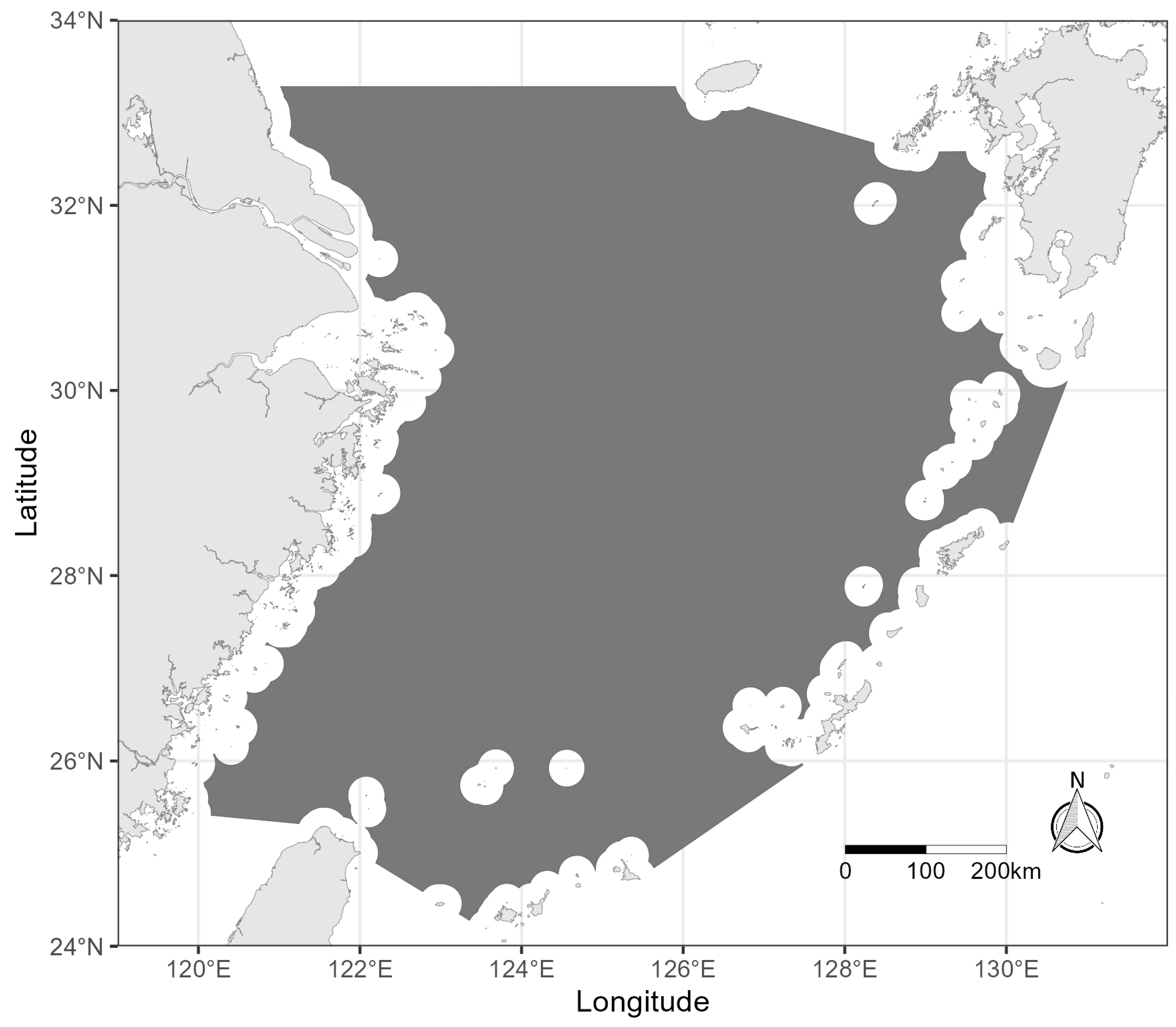
2.5.1. Study Area
2.5.2. Eliminating Overlapping Observations from VBD
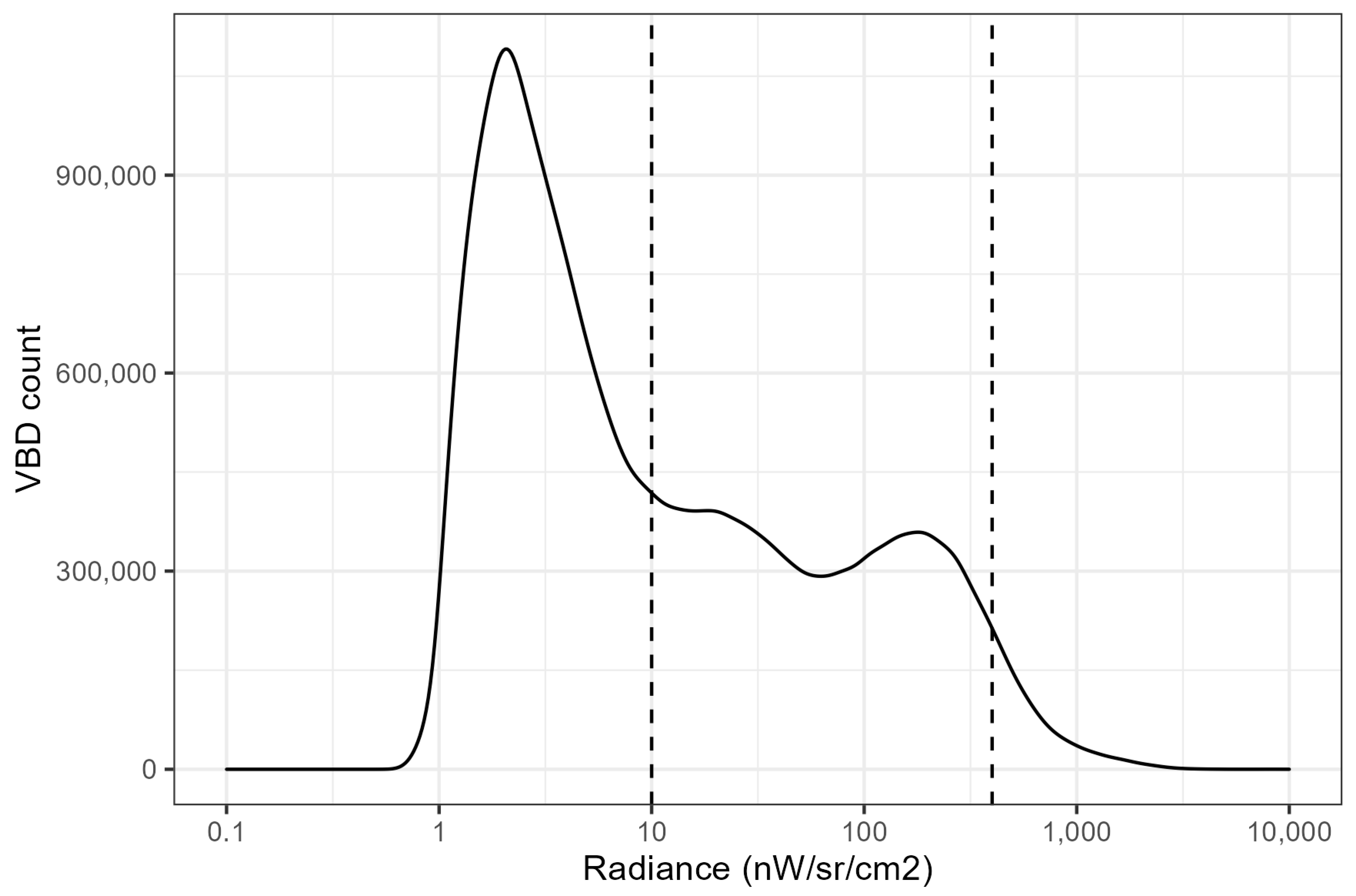
2.5.3. Inferring the Fishing Activities from VBD
3. Results
3.1. Model Evaluation
3.1.1. Detection Performance against Training and Testing Data
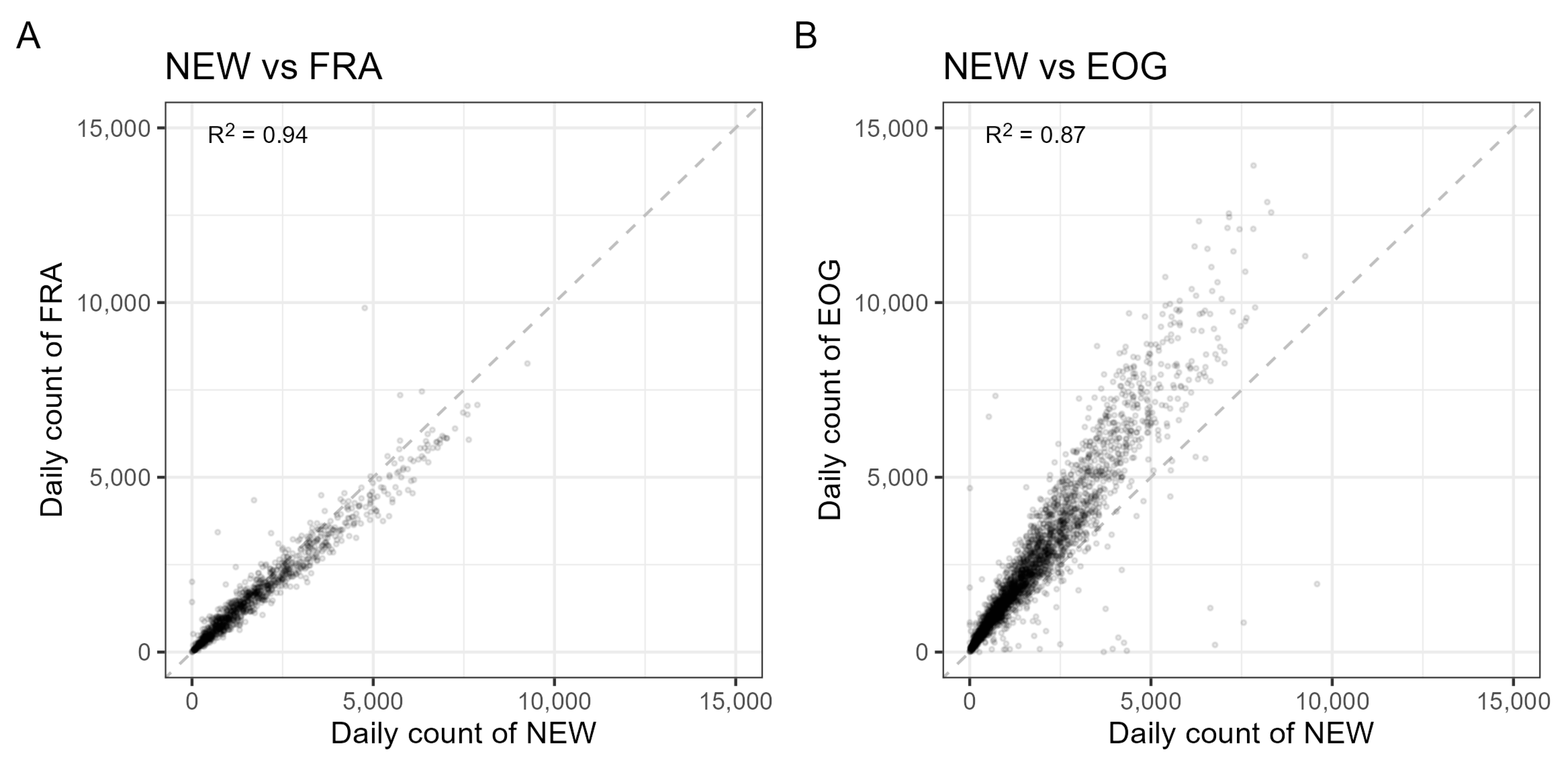
3.1.2. Comparison of the Model VBD with Existing VBDs
3.1.3. Evaluation with On-Ship Radar Data
3.2. Analysis of the East China Sea
4. Discussion
4.1. Model Evaluation
4.2. East China Sea Analysis
4.3. Technical Implications
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kataoka, C. The new fisheries regime and fisheries adjustment among Japan, China and Korea. Nippon Suisan Gakkaishi 2011, 77, 699–701. (In Japanese) [Google Scholar] [CrossRef]
- McCauley, D.J.; Woods, P.; Sullivan, B.; Bergman, B.; Jablonicky, C.; Roan, A.; Hirshfield, M.; Boerder, K.; Worm, B. Ending Hide and Seek at Sea. Science 2016, 351, 1148–1150. [Google Scholar] [CrossRef] [PubMed]
- Kroodsma, D.A.; Mayorga, J.; Hochberg, T.; Miller, N.A.; Boerder, K.; Ferretti, F.; Wilson, A.; Bergman, B.; White, T.D.; Block, B.A.; et al. Tracking the Global Footprint of Fisheries. Science 2018, 359, 904–908. [Google Scholar] [CrossRef] [PubMed]
- Kroodsma, D.A.; Hochberg, T.; Davis, P.B.; Paolo, F.S.; Joo, R.; Wong, B.A. Revealing the Global Longline Fleet with Satellite Radar. Sci. Rep. 2022, 12, 21004. [Google Scholar] [CrossRef] [PubMed]
- Miller, N.A.; Roan, A.; Hochberg, T.; Amos, J.; Kroodsma, D.A. Identifying Global Patterns of Transshipment Behavior. Front. Mar. Sci. 2018, 5, 240. [Google Scholar] [CrossRef]
- Park, J.; Lee, J.; Seto, K.; Hochberg, T.; Wong, B.A.; Miller, N.A.; Takasaki, K.; Kubota, H.; Oozeki, Y.; Doshi, S.; et al. Illuminating Dark Fishing Fleets in North Korea. Sci. Adv. 2020, 6, eabb1197. [Google Scholar] [CrossRef]
- Welch, H.; Clavelle, T.; White, T.D.; Cimino, M.A.; Van Osdel, J.; Hochberg, T.; Kroodsma, D.; Hazen, E.L. Hot Spots of Unseen Fishing Vessels. Sci. Adv. 2022, 8, eabq2109. [Google Scholar] [CrossRef]
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel Detection and Classification from Spaceborne Optical Images: A Literature Survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar] [CrossRef]
- Straka, W.C.; Seaman, C.J.; Baugh, K.; Cole, K.; Stevens, E.; Miller, S.D. Utilization of the Suomi National Polar-Orbiting Partnership (NPP) Visible Infrared Imaging Radiometer Suite (VIIRS) Day/Night Band for Arctic Ship Tracking and Fisheries Management. Remote Sens. 2015, 7, 971–989. [Google Scholar] [CrossRef]
- Miller, S.D.; Mills, S.P.; Elvidge, C.D.; Lindsey, D.T.; Lee, T.F.; Hawkins, J.D. Suomi Satellite Brings to Light a Unique Frontier of Nighttime Environmental Sensing Capabilities. Proc. Natl. Acad. Sci. USA 2012, 109, 15706–15711. [Google Scholar] [CrossRef]
- Miller, S.D.; Straka, W.; Mills, S.P.; Elvidge, C.D.; Lee, T.F.; Solbrig, J.; Walther, A.; Heidinger, A.K.; Weiss, S.C. Illuminating the Capabilities of the Suomi National Polar-Orbiting Partnership (NPP) Visible Infrared Imaging Radiometer Suite (VIIRS) Day/Night Band. Remote Sens. 2013, 5, 6717–6766. [Google Scholar] [CrossRef]
- Levin, N.; Kyba, C.C.M.; Zhang, Q.; Sánchez de Miguel, A.; Román, M.O.; Li, X.; Portnov, B.A.; Molthan, A.L.; Jechow, A.; Miller, S.D.; et al. Remote Sensing of Night Lights: A Review and an Outlook for the Future. Remote Sens. Environ. 2020, 237, 111443. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Zhizhin, M.; Baugh, K.; Hsu, F.-C. Automatic Boat Identification System for VIIRS Low Light Imaging Data. Remote Sens. 2015, 7, 3020–3036. [Google Scholar] [CrossRef]
- Oozeki, Y.; Inagake, D.; Saito, T.; Okazaki, M.; Fusejima, I.; Hotai, M.; Watanabe, T.; Sugisaki, H.; Miyahara, M. Reliable Estimation of IUU Fishing Catch Amounts in the Northwestern Pacific Adjacent to the Japanese EEZ: Potential for Usage of Satellite Remote Sensing Images. Mar. Policy 2018, 88, 64–74. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Ghosh, T.; Baugh, K.; Zhizhin, M.; Hsu, F.-C.; Katada, N.S.; Penalosa, W.; Hung, B.Q. Rating the Effectiveness of Fishery Closures With Visible Infrared Imaging Radiometer Suite Boat Detection Data. Front. Mar. Sci. 2018, 5, 132. [Google Scholar] [CrossRef]
- Geronimo, R.C.; Franklin, E.C.; Brainard, R.E.; Elvidge, C.D.; Santos, M.D.; Venegas, R.; Mora, C. Mapping Fishing Activities and Suitable Fishing Grounds Using Nighttime Satellite Images and Maximum Entropy Modelling. Remote Sens. 2018, 10, 1604. [Google Scholar] [CrossRef]
- Hsu, F.-C.; Elvidge, C.D.; Baugh, K.; Zhizhin, M.; Ghosh, T.; Kroodsma, D.; Susanto, A.; Budy, W.; Riyanto, M.; Nurzeha, R.; et al. Cross-Matching VIIRS Boat Detections with Vessel Monitoring System Tracks in Indonesia. Remote Sens. 2019, 11, 995. [Google Scholar] [CrossRef]
- Cozzolino, E.; Lasta, C.A. Use of VIIRS DNB Satellite Images to Detect Jigger Ships Involved in the Illex argentinus Fishery. Remote Sens. Appl. Soc. Environ. 2016, 4, 167–178. [Google Scholar] [CrossRef]
- Lebona, B.; Kleynhans, W.; Celik, T.; Mdakane, L. Ship Detection Using VIIRS Sensor Specific Data. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1245–1247. [Google Scholar]
- Xue, G. Bilateral Fisheries Agreements for the Cooperative Management of the Shared Resources of the China Seas: A Note. Ocean Dev. Int. Law 2005, 36, 363–374. [Google Scholar] [CrossRef]
- Tokimura, M. Fisheries and Their Resources in the East China Sea. Nippon Suisan Gakkaishi 2011, 77, 919–923. (In Japanese) [Google Scholar] [CrossRef]
- Kurota, K.; Muko, S.; Yoda, M.; Hihara, H.; Takahahi, M.; Sassa, C.; Kunimatsu, S. Stock Assessment and Evaluation for Tsushima Warm Current Stock of Chub Mackerel (Fiscal Year 2021). Stock. Assess. Eval. Jpn. Waters Fisc. Year 2021 Jpn. Fish. Agency Fish. Res. Educ. Agency Jpn. 2022, 69. (In Japanese) [Google Scholar]
- Kurota, K.; Muko, S.; Yoda, M.; Hihara, H.; Takahahi, M.; Sassa, C.; Kunimatsu, S. Stock Assessment and Evaluation for East China Sea Stock of Blue Mackerel (Fiscal Year 2021). Stock. Assess. Eval. Jpn. Waters Fisc. Year 2021 Jpn. Fish. Agency Fish. Res. Educ. Agency Jpn. 2022, 55. (In Japanese) [Google Scholar]
- Sassa, C.; Sakai, T.; Yoda, M.; Kurota, K. Stock Assessment and Evaluation for East China Sea and Japan Sea Stock of Swordtip Squid (Fiscal Year 2021). Stock. Assess. Eval. Jpn. Waters Fisc. Year 2021 Jpn. Fish. Agency Fish. Res. Educ. Agency Jpn. 2022, 21. (In Japanese) [Google Scholar]
- Kumazawa, T.; Fuxiang, H.; Kinoshita, H. Overview of Tora-Ami and Its Model Experiment. J. Fish. Boat Syst. Eng. Assoc. Japan 2011, 11, 57–65. (In Japanese) [Google Scholar]
- Matsushita, Y. About Pelagic Fisheries Techniques Carried out in the East China Sea. Mem. A Conf. Forecast. Ocean. Fish. Cond. East China Sea West. Jpn. Sea Seikai Block 2013, 20, 1–6. (In Japanese) [Google Scholar]
- Saito, R.; Sasaki, H.; Yamada, H.; Hiroe, Y.; Inagake, D.; Saito, T. Development of a Technique to Estimate the Horizontal Distribution of Lit Fishing Vessels in the East China Sea Using Satellite Luminescence. Fish. Sci. 2020, 86, 13–25. [Google Scholar] [CrossRef]
- Kurota, K.; Yoda, M.; Yasuda, T.; Suzuki, K.; Takegaki, S.; Sasa, C.; Takahashi, M. Stock Assessment and Evaluation for Tsushima Warm Current Stock of Chub Mackerel (Fiscal Year 2017). Mar. Fish. Stock. Assess. Eval. Jpn. Waters Fisc. Year 2016/2017), Jpn. Fish. Agency Fish. Res. Educ. Agency Jpn. 2018, 201–236. (In Japanese) [Google Scholar]
- Lim, J.S. Two-Dimensional Signal and Image Processing; Prentice Hall: Englewood Cliffs, NJ, USA, 1990. [Google Scholar]
- Wright, M.N.; Ziegler, A. Ranger: A Fast Implementation of Random Forests for High Dimensional Data in C++ and R. J. Stat. Softw. 2017, 77, 1–17. [Google Scholar] [CrossRef]
- Zhang, S.; Jin, S.; Zhang, H.; Fan, W.; Tang, F.; Yang, S. Distribution of Bottom Trawling Effort in the Yellow Sea and East China Sea. PLoS ONE 2016, 11, e0166640. [Google Scholar] [CrossRef]
- Luo, L.; Kang, M.; Guo, J.; Zhuang, Y.; Liu, Z.; Wang, Y.; Zou, L. Spatiotemporal Pattern Analysis of Potential Light Seine Fishing Areas in the East China Sea Using VIIRS Day/Night Band Imagery. Int. J. Remote Sens. 2019, 40, 1460–1480. [Google Scholar] [CrossRef]
- Shen, G.; Heino, M. An Overview of Marine Fisheries Management in China. Mar. Policy 2014, 44, 265–272. [Google Scholar] [CrossRef]
- Xu, L.; Song, P.; Wang, Y.; Xie, B.; Huang, L.; Li, Y.; Zheng, X.; Lin, L. Estimating the Impact of a Seasonal Fishing Moratorium on the East China Sea Ecosystem From 1997 to 2018. Front. Mar. Sci. 2022, 9, 747. [Google Scholar] [CrossRef]
- Park, J. A 2020 Analysis: Detecting the Dark Fleets in North Korea and Russia. Available online: https://Globalfishingwatch.Org/Fisheries/2020-Analysis-Dark-Fleets/ (accessed on 26 May 2023).
- Zhang, C.; Chen, Y.; Xu, B.; Xue, Y.; Ren, Y. The Dynamics of the Fishing Fleet in China Seas: A Glimpse through AIS Monitoring. Sci. Total Environ. 2022, 819, 153150. [Google Scholar] [CrossRef]
- Taconet, M.; Kroodsma, D.; Fernandes, J.A. Global Atlas of AIS-Based Fishing Activity; FAO: Rome, Italy, 2020. [Google Scholar]
- Chawla, N.V.; Bowyer, K.W.; Hall, L.O.; Kegelmeyer, W.P. SMOTE: Synthetic Minority Over-Sampling Technique. J. Artif. Intell. Res. 2002, 16, 321–357. [Google Scholar] [CrossRef]
- Wallace, B.C.; Small, K.; Brodley, C.E.; Trikalinos, T.A. Class Imbalance, Redux. In Proceedings of the 2011 IEEE 11th International Conference on Data Mining, Vancouver, BC, Canada, 11–14 December 2011; pp. 754–763. [Google Scholar]
- Huang, H.; Hong, F.; Liu, J.; Liu, C.; Feng, Y.; Guo, Z. FVID: Fishing Vessel Type Identification Based on VMS Trajectories. J. Ocean Univ. China 2018, 18, 403–412. [Google Scholar] [CrossRef]
- Pavón-Carrasco, F.J.; De Santis, A. The South Atlantic Anomaly: The Key for a Possible Geomagnetic Reversal. Front. Earth Sci. 2016, 4, 40. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Meng, G.; Guo, C.; Jiang, Z. Few-Shot Multi-Class Ship Detection in Remote Sensing Images Using Attention Feature Map and Multi-Relation Detector. Remote Sens. 2022, 14, 2790. [Google Scholar] [CrossRef]
- Lu, C.; Li, W. Ship Classification in High-Resolution SAR Images via Transfer Learning with Small Training Dataset. Sensors 2019, 19, 63. [Google Scholar] [CrossRef]
- Rostami, M.; Kolouri, S.; Eaton, E.; Kim, K. Deep Transfer Learning for Few-Shot SAR Image Classification. Remote Sens. 2019, 11, 1374. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameter | Value | Explanation |
|---|---|---|
| N_tree | 50 | The number of trees in the ensemble |
| N_val | 3 | The number of variables randomly sampled at each split when creating the tree models |
| Min_n | 316 | The minimum number of data points in a node required for the node to be split further |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsuda, M.E.; Miller, N.A.; Saito, R.; Park, J.; Oozeki, Y. Automated VIIRS Boat Detection Based on Machine Learning and Its Application to Monitoring Fisheries in the East China Sea. Remote Sens. 2023, 15, 2911. https://doi.org/10.3390/rs15112911
Tsuda ME, Miller NA, Saito R, Park J, Oozeki Y. Automated VIIRS Boat Detection Based on Machine Learning and Its Application to Monitoring Fisheries in the East China Sea. Remote Sensing. 2023; 15(11):2911. https://doi.org/10.3390/rs15112911
Chicago/Turabian StyleTsuda, Masaki E., Nathan A. Miller, Rui Saito, Jaeyoon Park, and Yoshioki Oozeki. 2023. "Automated VIIRS Boat Detection Based on Machine Learning and Its Application to Monitoring Fisheries in the East China Sea" Remote Sensing 15, no. 11: 2911. https://doi.org/10.3390/rs15112911
APA StyleTsuda, M. E., Miller, N. A., Saito, R., Park, J., & Oozeki, Y. (2023). Automated VIIRS Boat Detection Based on Machine Learning and Its Application to Monitoring Fisheries in the East China Sea. Remote Sensing, 15(11), 2911. https://doi.org/10.3390/rs15112911