
Multi-Node Motion Estimation Method Based on B-Spline of Array Position and Orientation System


Abstract
:
1. Introduction
2. Materials and Methods
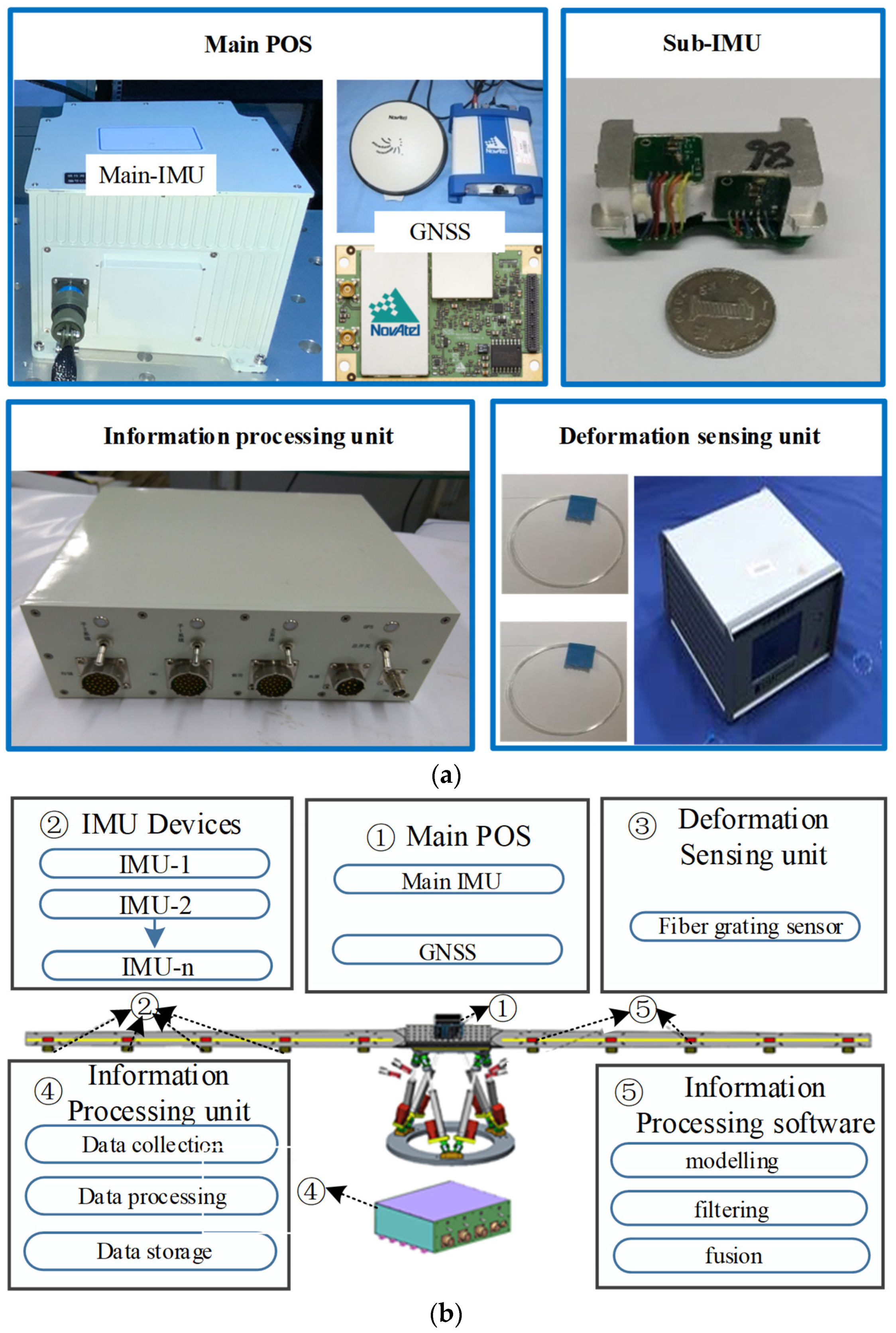
2.1. Composition of the Array POS
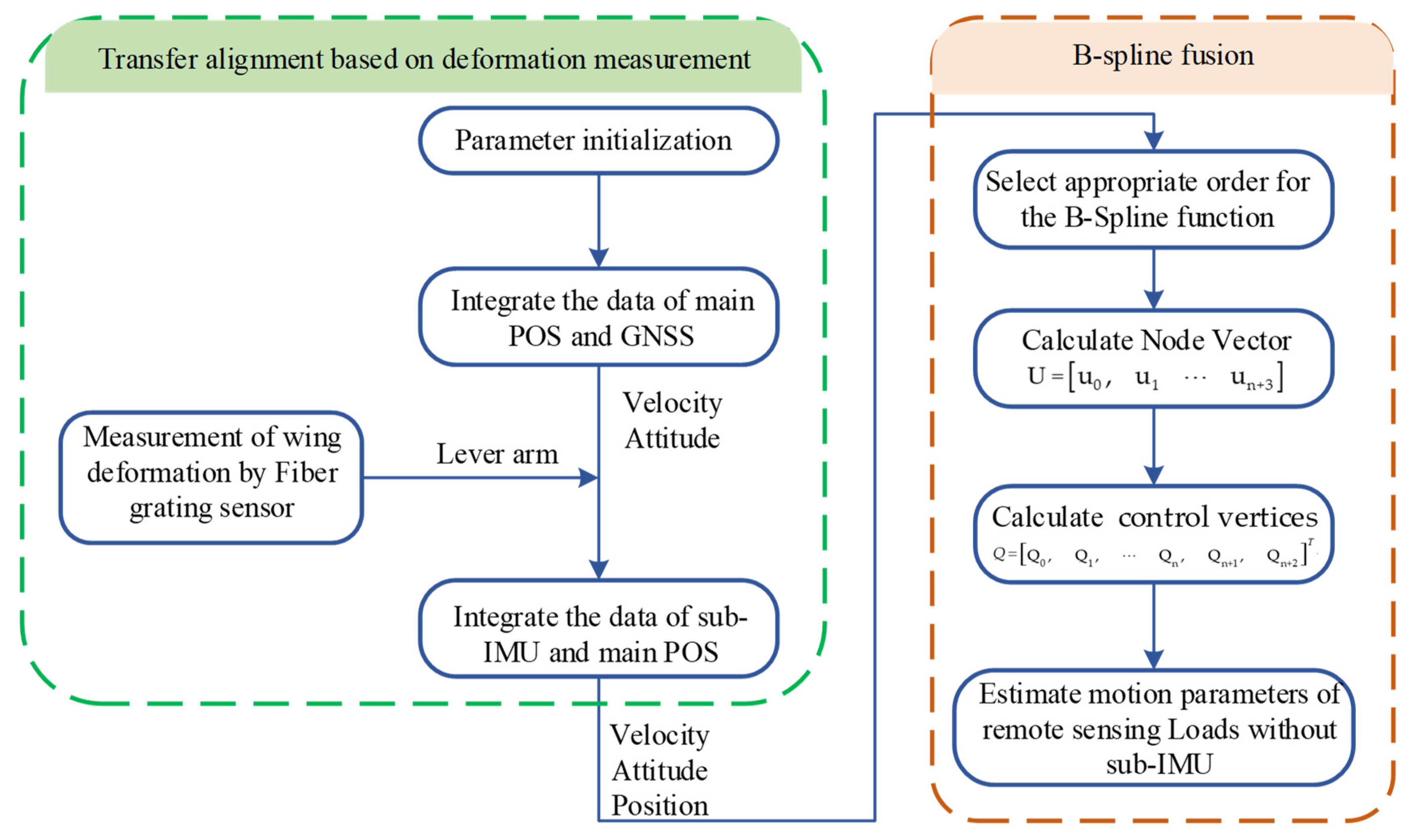
2.2. Design of Transfer Alignment for the Array POS
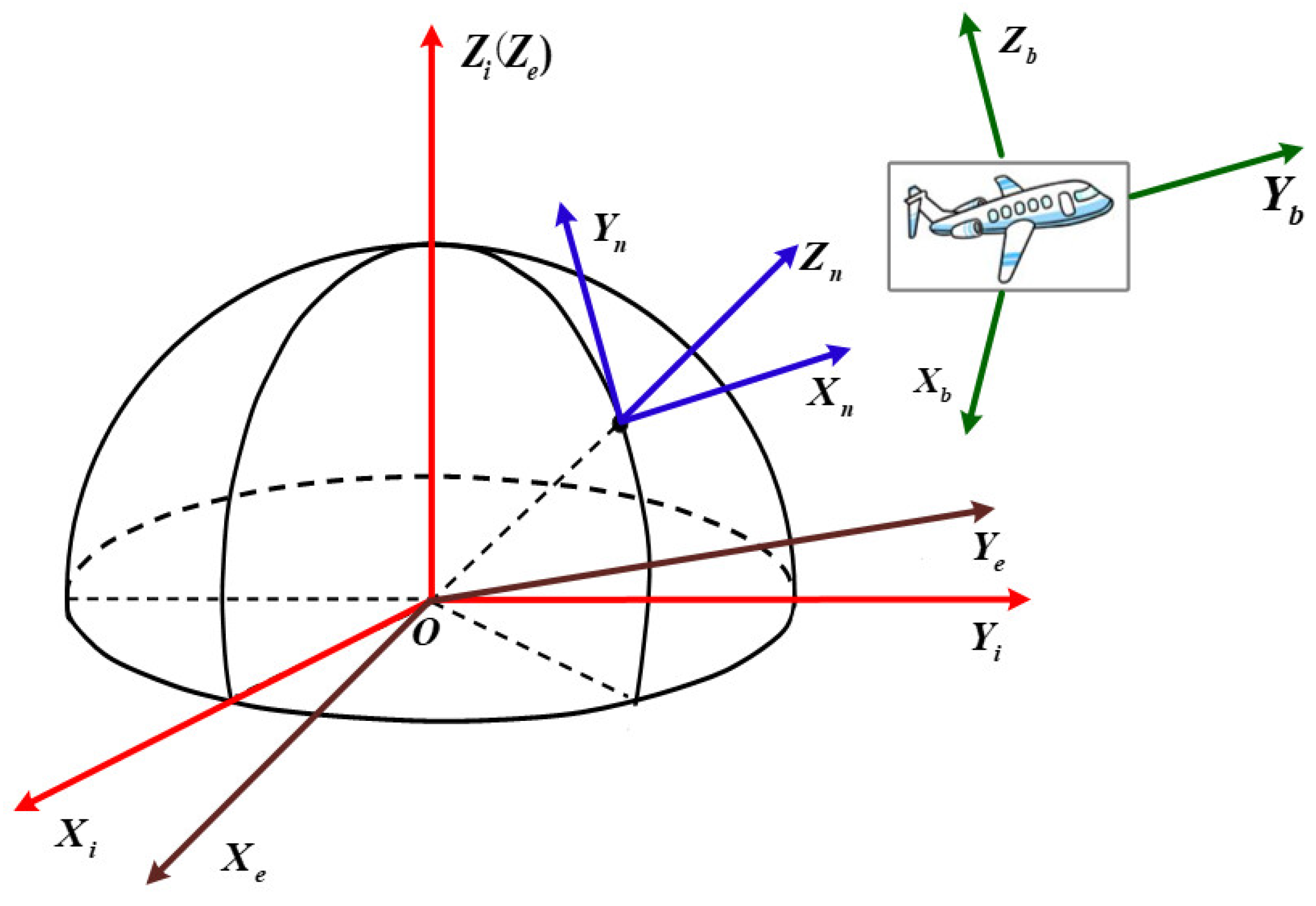
2.2.1. State Equation
2.2.2. Observation Equation
- Observation equation of main POS:
- Observation equation of the sub-IMU:
2.3. The B-Spline Fusion Model
2.3.1. Calculation of the Node Vector
2.3.2. Calculation of the Control Vertices
3. Results
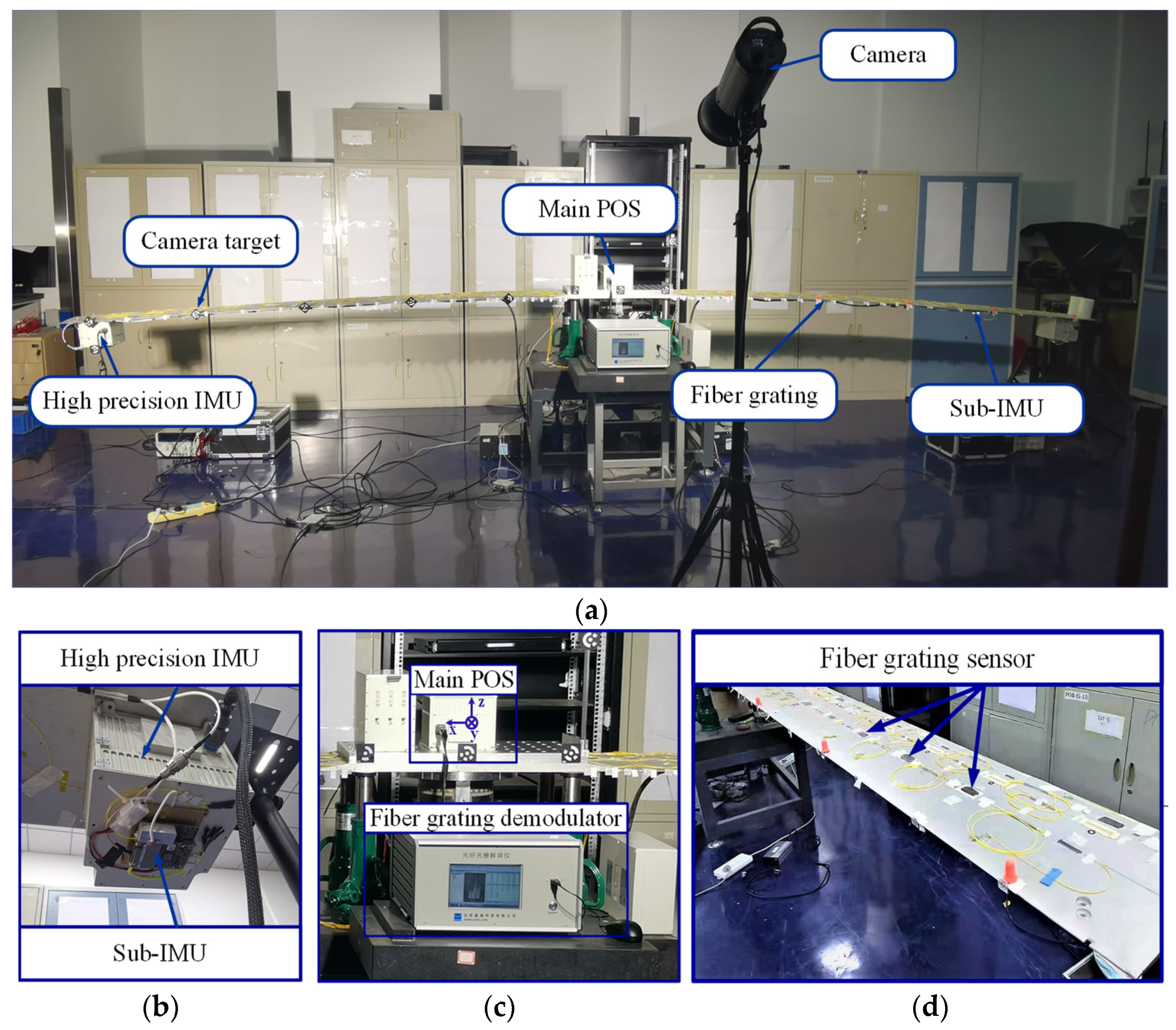
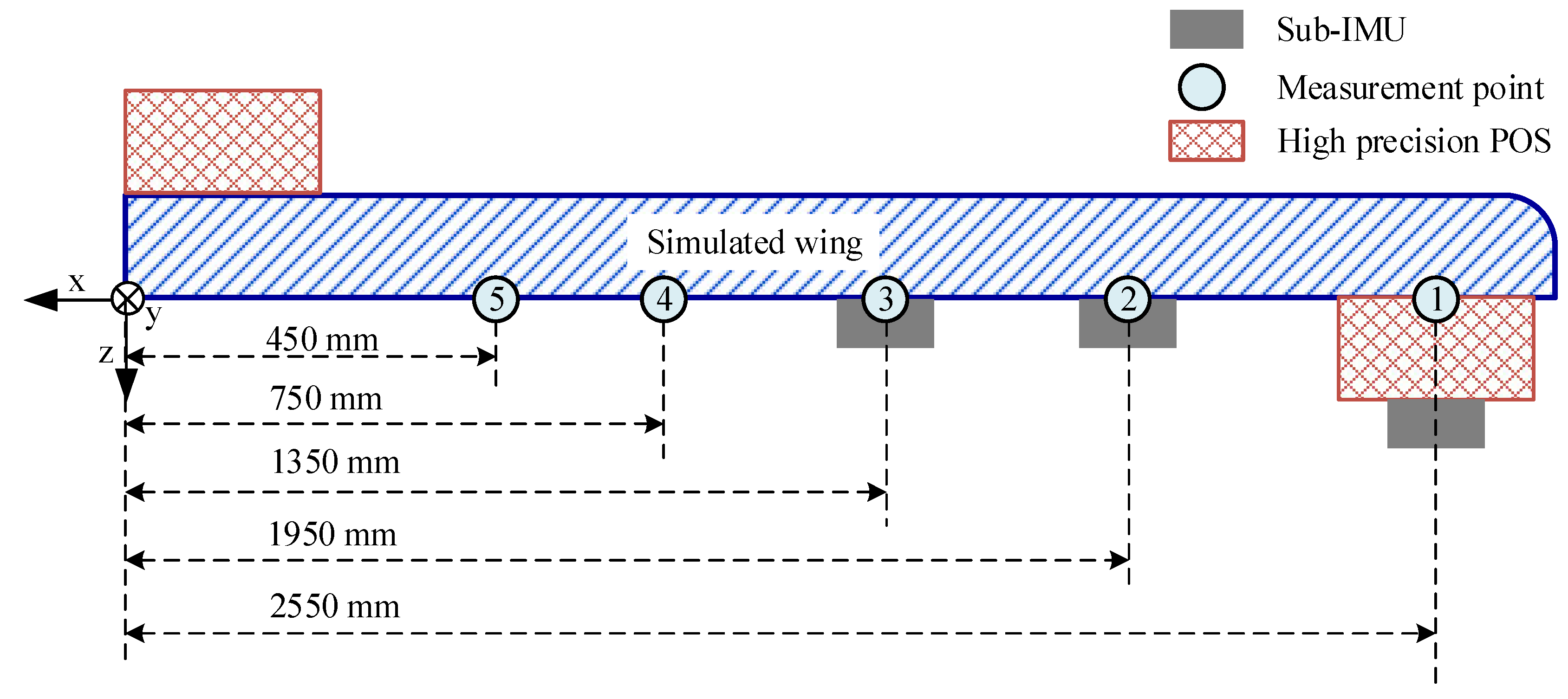
3.1. Experimental Equipment
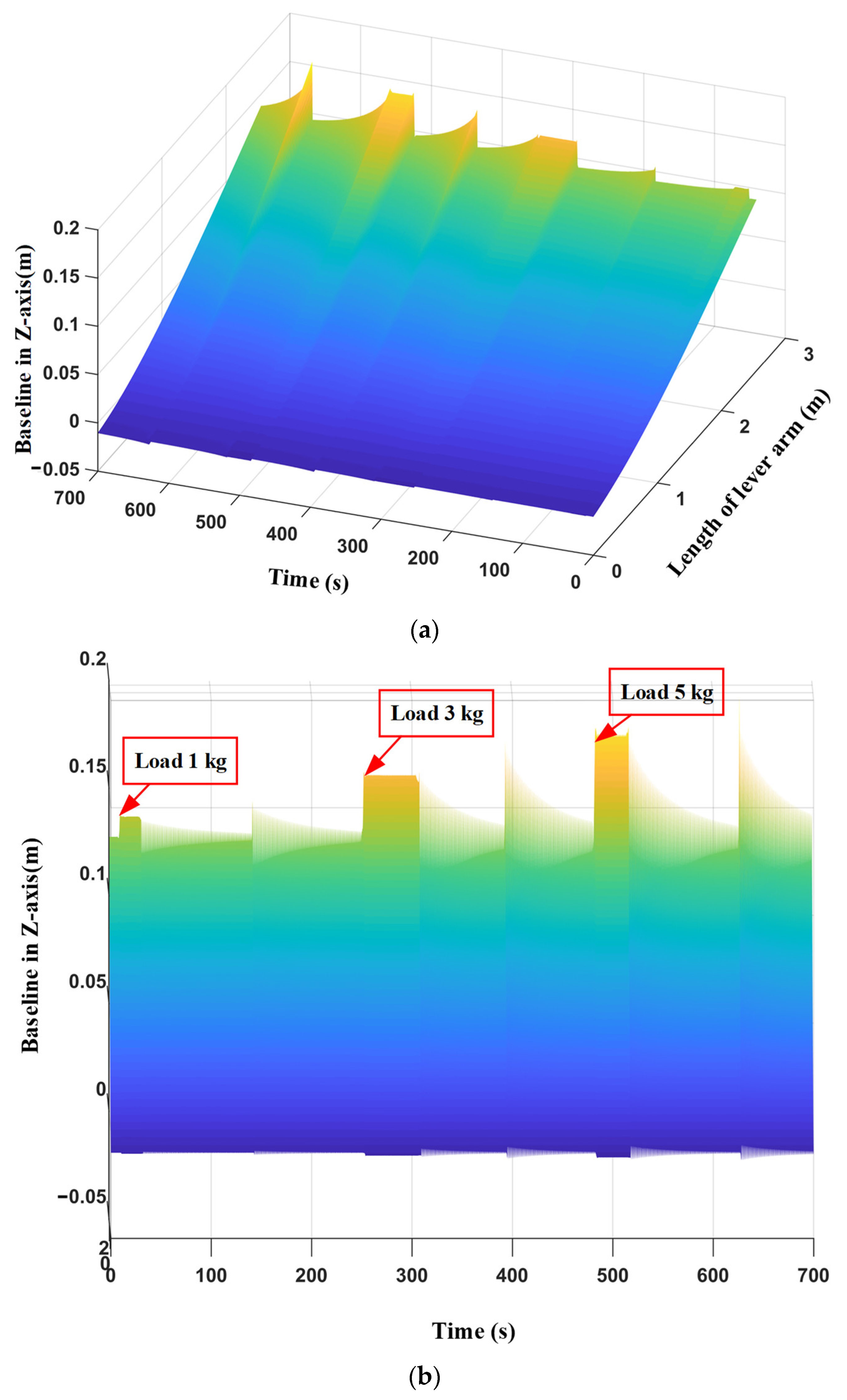
3.2. Experiment Results
4. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Montgomery, J.; Mahoney, C.; Brisco, B. Remote Sensing of Wetlands in the Prairie Pothole Region of North America. Remote Sens. 2021, 13, 3878. [Google Scholar]
- Tsokas, A.; Rysz, M.; Pardalos, P. SAR Data Applications in Earth Observation: An Overview. Expert Syst. Appl. 2022, 205, 117342. [Google Scholar]
- Chen, L.; Liu, Z.; Fang, J. An Accurate Motion Compensation for SAR Imagery based on INS/GPS with Dual-filter Correction. J. Navig. 2019, 72, 1399–1416. [Google Scholar]
- Zhang, B.; Yu, A.; Chen, X. Comparative Analysis of Single-View and Multi-View Airborne SAR Positioning Error and Course Planning for Multi-View Airborne SAR Optimal Positioning. Remote Sens. 2022, 14, 3055. [Google Scholar]
- Qu, C.; Li, J.; Bao, J.; Zhu, Z. Design and Development of Array POS for Airborne Remote Sensing Motion Compensation. Remote Sens. 2022, 14, 3420. [Google Scholar] [CrossRef]
- Wang, J.; Liang, X.; Ding, C.; Chen, L.; Wang, Z.; Li, K. A novel scheme for ambiguous energy suppression in MIMO-SAR systems. IEEE Geosci. Remote Sens. Lett. 2015, 12, 344–348. [Google Scholar]
- Gong, X.L.; Ding, X.S. Adaptive CDKF Based on Gradient Descent with Momentum and its Application to POS. IEEE Sens. J. 2021, 21, 16201–16212. [Google Scholar]
- Ye, W.; Liu, Z.; Li, C.; Fang, J. Enhanced Kalman Filter using Noisy Input Gaussian Process Regression for Bridging GPS Outages in a POS. J. Navig. 2018, 71, 565–584. [Google Scholar]
- Qu, C.; Li, J. A novel relative motion measurement method based on distributed POS relative parameters matching transfer alignment. Measurement 2022, 202, 111890. [Google Scholar] [CrossRef]
- Ye, W.; Li, J.; Li, L. Design and development of a real-time multi-DSPs and FPGA-based DPOS for InSAR applications. IEEE Sens. J. 2018, 18, 3419–3425. [Google Scholar]
- Li, J.; Jia, L.; Liu, G. Multisensor Time Synchronization Error Modeling and Compensation Method for Distributed POS. IEEE Trans. Instrum. Meas. 2016, 65, 2637–2645. [Google Scholar]
- Bao, J.; Li, J.; Wei, M.; Qu, C. An Improved Innovation Robust Outliers Detection Method for Airborne Array Position and Orientation Measurement System. Remote Sens. 2023, 15, 26. [Google Scholar] [CrossRef]
- Li, J.; Qu, C. A Novel Transfer Alignment Method of Array POS Based on Lever-arm Estimation. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar]
- Li, J.; Qu, C.; Zhu, Z. Six-Dimensional Deformation Measurement of Distributed POS Based on FBG Sensors. IEEE Sens. J. 2021, 21, 7849–7856. [Google Scholar]
- Ye, W.; Li, J.; Fang, J. EGP-CDKF for Performance Improvement of the SINS/GNSS Integrated System. IEEE Trans. Ind. Electron. 2018, 65, 3601–3609. [Google Scholar]
- Liu, Y.; Wang, B.; Ning, L.; Gu, B. Global Estimation Method Based on Spatial–Temporal Kalman Filter for DPOS. IEEE Sens. J. 2021, 21, 3748–3756. [Google Scholar]
- Wang, G.; Xu, X.; Yao, Y. A Novel BPNN-based method to overcome the GPS Outages for INS/GPS system. IEEE Access 2019, 7, 82134–82143. [Google Scholar]
- Wei, X.; Li, J.; Feng, K.; Zhang, D.; Li, P.; Zhao, L.; Jiao, Y. A Mixed Optimization Method Based on Adaptive Kalman Filter and Wavelet Neural Network for INS/GPS During GPS Outages. IEEE Access 2021, 9, 47875–47886. [Google Scholar]
- Liu, C.; Liu, Z.; Han, X. Preconditioned progressive iterative approximation for tensor product Bézier patches. Math. Comput. Simul. 2021, 185, 372–383. [Google Scholar]
- Hamza, Y.; Lin, H.; Li, Z. Implicit progressive-iterative approximation for curve and surface reconstruction. Comput. Aided Geom. Des. 2020, 77, 101817. [Google Scholar]
- Zheng, R.; Chen, C.; Yang, G. Deck deformation measurement of large-sized ship based on LSE. J. Harbin Inst. Technol. 2009, 41, 141–144. [Google Scholar]
- Gong, X.; Liu, H.; Fang, J.; Liu, G. Multi-Node Transfer Alignment Based on Mechanics Modeling for Airborne DPOS. IEEE Sens. J. 2018, 18, 669–6799. [Google Scholar]
- Wang, J.; Zhang, A.; Meng, X. Super-resolution reconstruction of remote sensing image based on staggered pixels and non-uniform B-spline curved surface. Remote Sens. Land Resour. 2015, 27, 35–43. [Google Scholar]
- Gawali, D.; Patil, B.V.; Zidna, A. Constrained global optimization of multivariate polynomials using polynomial B-spline form and B-spline consistency prune approach. RAIRO-Oper. Res. 2021, 55, 3743–3771. [Google Scholar]
- Peng, R. Non-Ellipsoidal Infrared Group/Extended Target Tracking Based on Poisson Multi-Bernoulli Mixture Filter and B-Spline. Remote Sens. 2023, 15, 606. [Google Scholar]
- Ding, Z.; Tan, W.; Wang, Y.; Hong, W.; Wu, Y. Impact analysis of motion measurement error on array antenna SAR three dimensional imaging. J. Electron. Inf. Technol. 2015, 37, 1424–1430. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Index |
|---|---|
| Gyro drift of main POS | 0.01°/h |
| Accelerometer bias of main POS | 20 μg |
| Gyro drift of sub-IMU | 5°/h |
| Accelerometers random of sub-IMU | 50 μg |
| Accuracy (STD) | Baseline in X-Axis | Baseline in Y-Axis | Baseline in Z-Axis | |||
|---|---|---|---|---|---|---|
| Transfer Alignment Result | B-Spline Fusion Result | Transfer Alignment Result | B-Spline Fusion Result | Transfer Alignment Result | B-Spline Fusion Result | |
| Load 1 kg | 6.226 | 5.748 | 0.641 | 0.531 | 5.069 | 3.987 |
| Load 3 kg | 5.384 | 5.013 | 0.762 | 0.617 | 5.292 | 4.164 |
| Load 5 kg | 7.197 | 6.594 | 0.839 | 0.683 | 5.467 | 4.302 |
| Average | 6.269 | 5.785 | 0.747 | 0.610 | 5.376 | 4.151 |
| Accuracy (STD) | Measuring Point 1 | |
|---|---|---|
| Transfer Alignment Result | B-Spline Fusion Result | |
| load 1 kg | 0.016° | 0.011° |
| load 3 kg | 0.048° | 0.035° |
| load 5 kg | 0.057° | 0.041° |
| Average | 0.040° | 0.029° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, J.; Li, J.; Qu, C.; Li, Y. Multi-Node Motion Estimation Method Based on B-Spline of Array Position and Orientation System. Remote Sens. 2023, 15, 2892. https://doi.org/10.3390/rs15112892
Bao J, Li J, Qu C, Li Y. Multi-Node Motion Estimation Method Based on B-Spline of Array Position and Orientation System. Remote Sensing. 2023; 15(11):2892. https://doi.org/10.3390/rs15112892
Chicago/Turabian StyleBao, Junfang, Jianli Li, Chunyu Qu, and Yunzhu Li. 2023. "Multi-Node Motion Estimation Method Based on B-Spline of Array Position and Orientation System" Remote Sensing 15, no. 11: 2892. https://doi.org/10.3390/rs15112892
APA StyleBao, J., Li, J., Qu, C., & Li, Y. (2023). Multi-Node Motion Estimation Method Based on B-Spline of Array Position and Orientation System. Remote Sensing, 15(11), 2892. https://doi.org/10.3390/rs15112892