
An Enhanced Storm Warning and Nowcasting Model in Pre-Convection Environments
 ,
,  , ,
, ,
Abstract
1. Introduction
2. Data
3. Methodology
3.1. SWIPE Model and Existing Issues
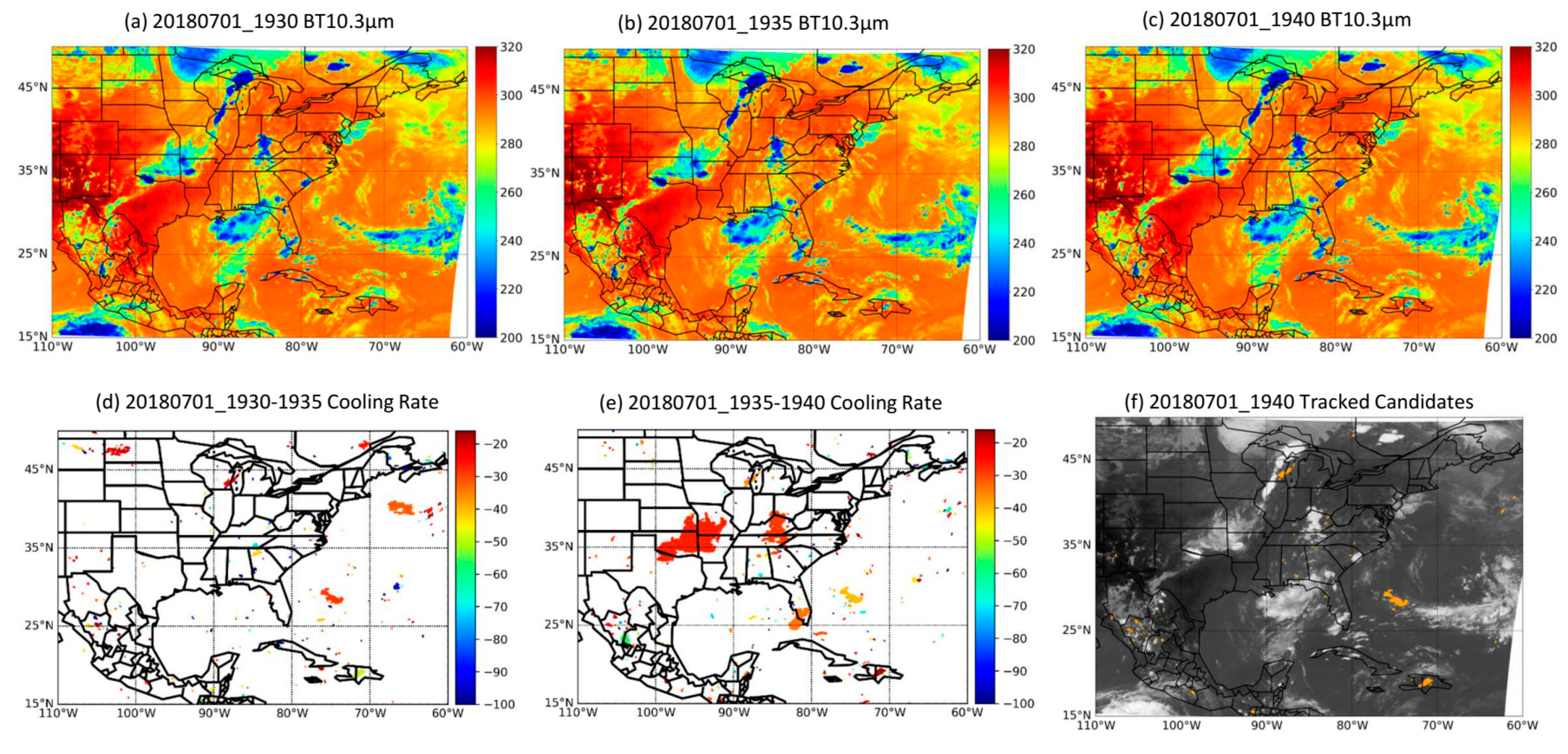
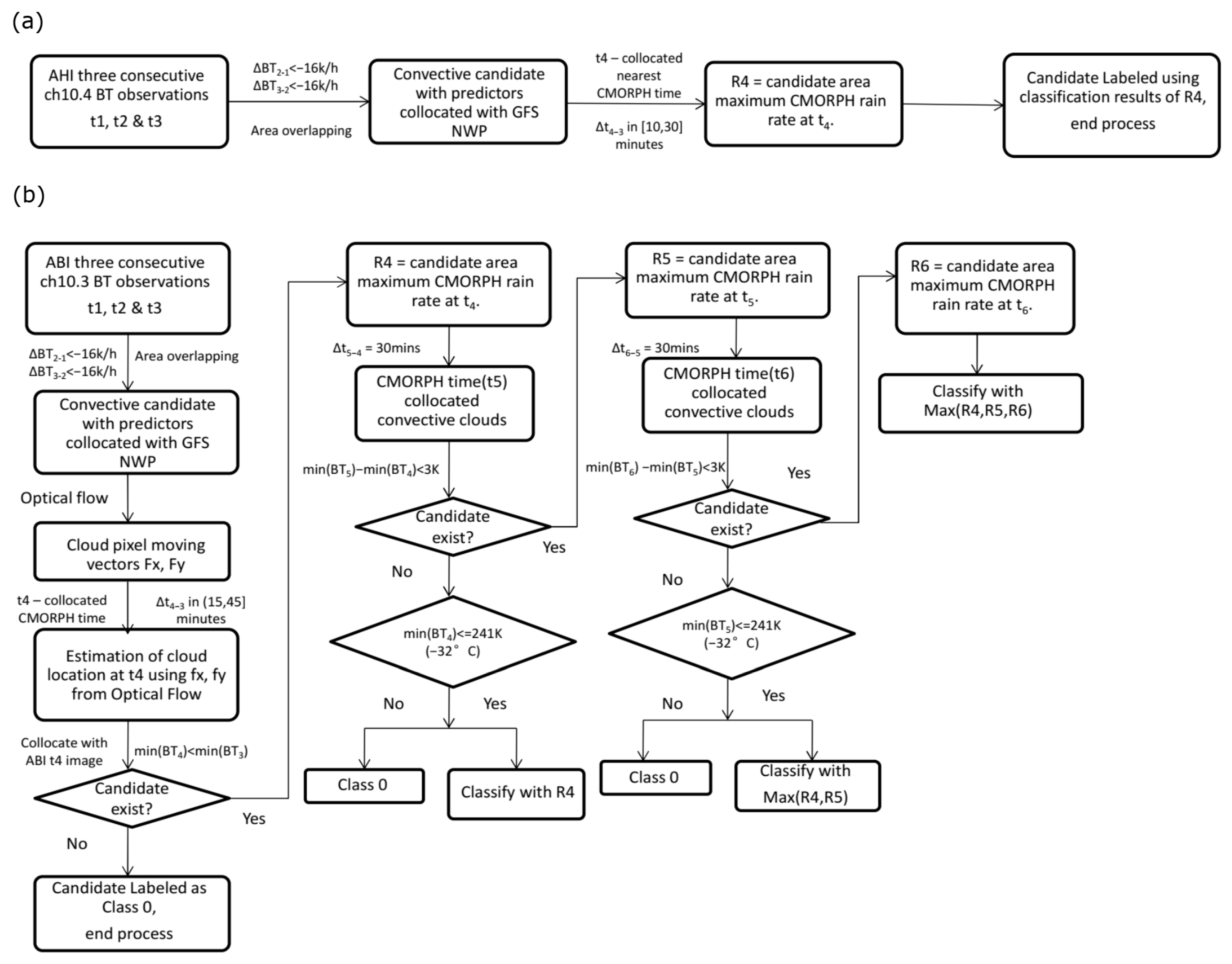
- Convection identification and tracking. Possible clouds are firstly identified from BT observations of 10.4 μm as spatially continuous pixels with eight neighboring pixels that are no more than 273 K for each observation time of AHI. Candidate clouds with the potential of becoming convective are identified through two consecutive cooling rates calculated from the 10.4 µm band BT observations of three consecutive AHI images. The cooling rates are calculated from the equations below:For BTA2,1, the three subscripts A, 2 and 1 denote the candidate cloud, observation time and the pixel number within the cloud, respectively. N1, N2 and N3 represent the varying total pixel numbers of the tracked cloud at different consecutive times. Furthermore, t1, t2 and t3 are the times of the three AHI observations. To eliminate sudden noise and large-scale clouds that are associated with frontal cloud systems, clouds with a total pixel number less than 10 or greater than 50,000 are omitted. The corresponding clouds from different geostationary images are determined through an area overlapping method [41], and those clouds with both R1 and R2 reaching a cooling rate of 16 K/h are marked as candidates for potential convection and put into datasets for model training and validation. The cloud candidates that meet the consecutive cooling thresholds will be the targets of subsequent collocation and model development. This cooling rate requirement ensures that the SWIPE model is useful in the pre-convective environment or in the early stages of convection, where the storm just starts to develop and radar is less effective due to no or weak radar reflectivity.
- Collocation of datasets. With tracked cases from geostationary observations, the BT variables from multiple channels of the cloud candidates are collocated with NWP variables and precipitation products to build a dataset for training and validation. For NWP, interpolations are made to match the grids to geostationary satellite pixels. For precipitation products, the analysis data immediately following the time a candidate is recognized is used to match the datasets as the truth value for classification [29]. Then, the convective candidates are divided into three intensity classes based on the maximum precipitation rate, and labeled accordingly for training and validation.
- After the historical training dataset is built, the random forest (RF) algorithm [42] is used to train and optimize the convection intensity classification predictive model. During the training, a sample-balance technique is applied to avoid overfitting the model to the majority class (the weak class for this study) by adjusting the sample sizes of the three classes to 1:1:1 through under-sampling. Note that the weak class has a sample size that is 120 times that of the severe class.
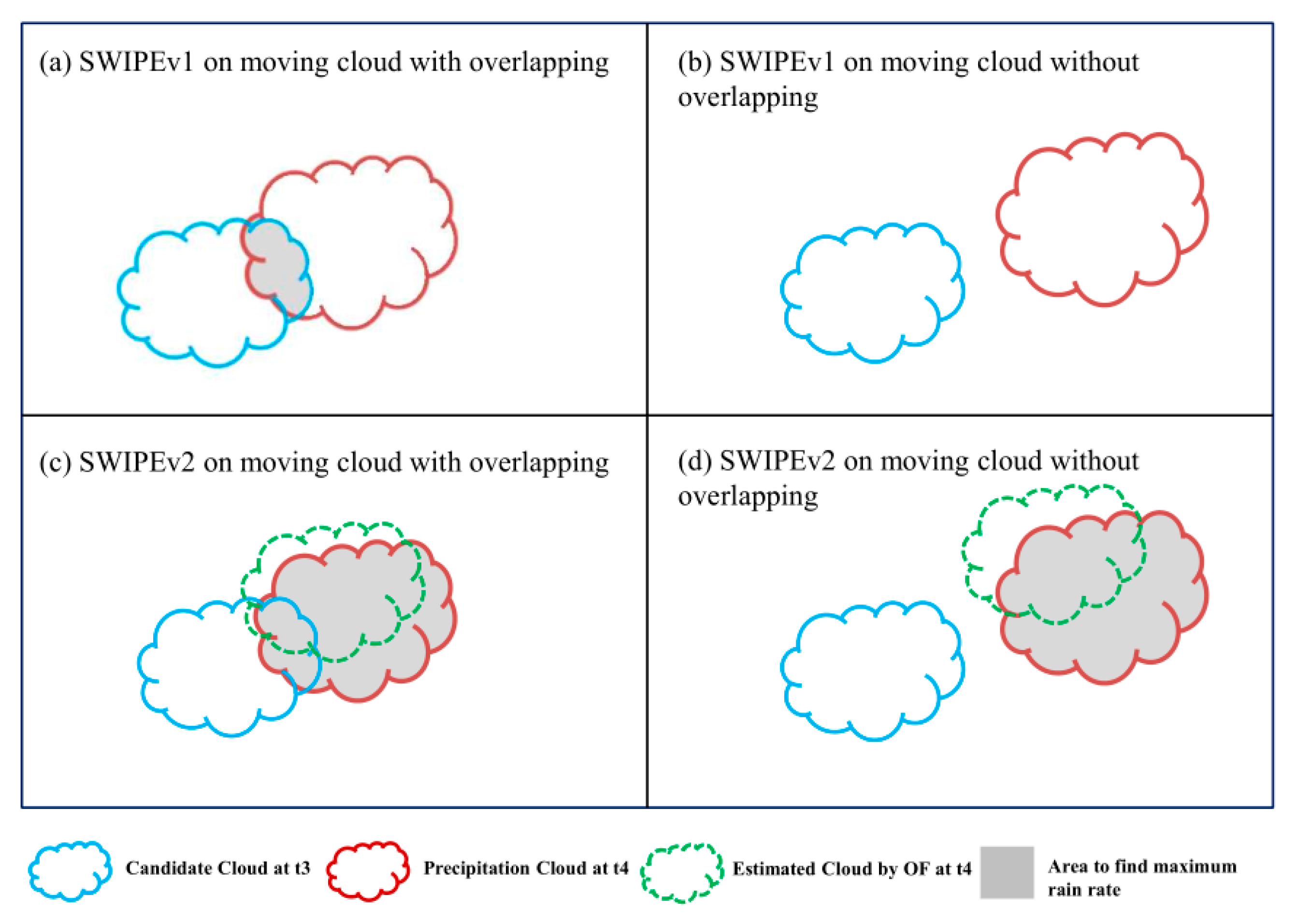
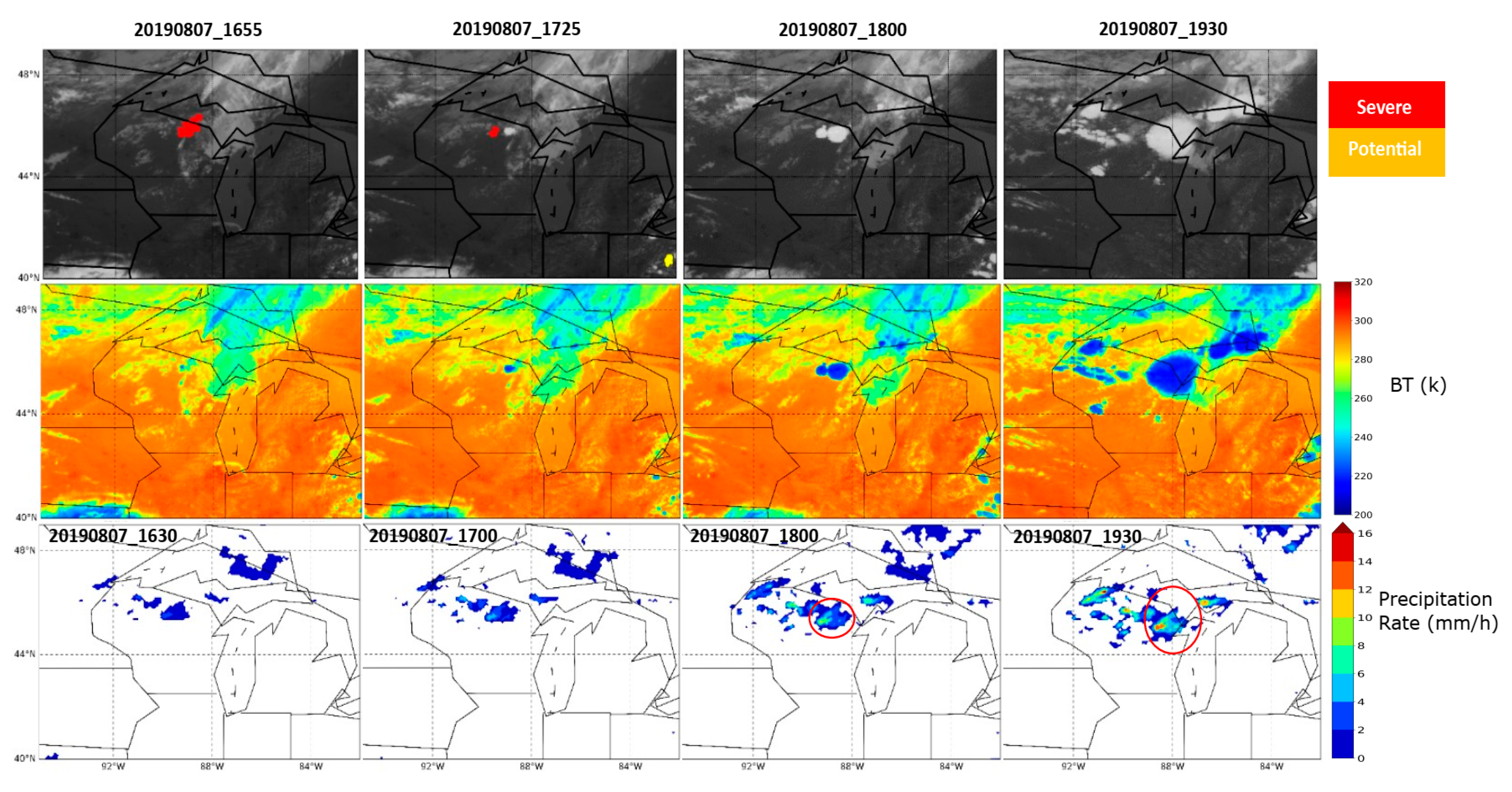
- During the collocation process, the collocated rain rate for a case was derived from the maximum value within the cloud region. This cloud region was determined at the time (t3) when the cloud candidates were identified. The movement of the convective cloud during the time period between the candidate identification and collocated rain rate was not considered. This could result in uncertainties in intensity classification, especially for those clouds with a maximum rain rate outside of the original cloud domain. Collocation with the moved cloud candidates at the time of the rainfall analysis data would be more accurate and objective.
- Only the precipitation data closest in time was considered when building the training dataset. AHI has a scan rate of 10 min for the region of interest, while the time interval of the precipitation analysis (GPM and CMORPH) is 30 min; therefore, the time between identifying candidate clouds and the precipitation analysis was between 10 and 30 min. If the storm is not mature at the precipitation analysis time, the rain rate used does not reflect the true storm intensity. Some convective clouds may need more time to develop and to fully demonstrate their intensities. Therefore, further tracking and collocation with multiple rain rate analyses for the whole lifetime of the storm is required, ensuring the true maximum storm intensity is successfully characterized.
3.2. Optimized Model Framework for ABI
3.3. Convective Dataset
4. Prediction Model
4.1. Random Forest Training
4.2. Model Evaluation
4.3. Case Demonstration
4.4. Relative Importance of Predictors
5. Summary
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johns, R.H.; Doswell, C.A., III. Severe Local Storms Forecasting. Weather Forecast. 1992, 7, 588–612. [Google Scholar] [CrossRef]
- Doswell, C.A. Severe Convective Storms—An Overview. In Severe Convective Storms; Springer: Boston, MA, USA, 2001; pp. 1–26. [Google Scholar]
- Browning, K.A.; Blyth, A.M.; Clark, P.A.; Corsmeier, U.; Morcrette, C.J.; Agnew, J.L.; Ballard, S.P.; Bamber, D.; Barthlott, C.; Bennett, L.J.; et al. The Convective Storm Initiation Project. Bull. Am. Meteorol. Soc. 2007, 88, 1939–1956. [Google Scholar] [CrossRef]
- Dixon, M.; Wiener, G. TITAN: Thunderstorm Identification, Tracking, Analysis, and Nowcasting—A Radar-Based Methodology. J. Atmos. Ocean. Technol. 1993, 10, 785–797. [Google Scholar] [CrossRef]
- Matyas, C.J.; Carleton, A.M. Surface Radar-Derived Convective Rainfall Associations with Midwest US Land Surface Conditions in Summer Seasons 1999 and 2000. Theor. Appl. Clim. 2010, 99, 315–330. [Google Scholar] [CrossRef]
- Roberts, R.D.; Rutledge, S. Nowcasting Storm Initiation and Growth Using GOES-8 and WSR-88D Data. Weather Forecast. 2003, 18, 23. [Google Scholar] [CrossRef]
- Maddox, R.A. Mesoscale Convective Complexes. Bull. Am. Meteorol. Soc. 1980, 61, 1374–1387. [Google Scholar] [CrossRef]
- Velasco, I.; Fritsch, J.M. Mesoscale Convective Complexes in the Americas. J. Geophys. Res. Atmos. 1987, 92, 9591–9613. [Google Scholar] [CrossRef]
- Mathon, V.; Laurent, H. Life Cycle of Sahelian Mesoscale Convective Cloud Systems. Q. J. R. Meteorol. Soc. 2001, 127, 377–406. [Google Scholar] [CrossRef]
- Vila, D.A.; Machado, L.A.T.; Laurent, H.; Velasco, I. Forecast and Tracking the Evolution of Cloud Clusters (ForTraCC) Using Satellite Infrared Imagery: Methodology and Validation. Weather Forecast. 2008, 23, 233–245. [Google Scholar] [CrossRef]
- Mecikalski, J.R.; Feltz, W.F.; Murray, J.J.; Johnson, D.B.; Bedka, K.M.; Bedka, S.T.; Wimmers, A.J.; Pavolonis, M.; Berendes, T.A.; Haggerty, J.; et al. Aviation Applications for Satellite-Based Observations of Cloud Properties, Convection Initiation, In-Flight Icing, Turbulence, and Volcanic Ash. Bull. Am. Meteorol. Soc. 2007, 88, 1589–1607. [Google Scholar] [CrossRef]
- Mosher, F. Detection of deep convection around the globe. In Proceedings of the Preprints, 10th Conference on Aviation, Range, and Aerospace Meteorology, American Meteorological Society, Portland, OR, USA, 13–16 May 2002; Volume 289, p. 292. [Google Scholar]
- Mecikalski, J.R.; Bedka, K.M. Forecasting Convective Initiation by Monitoring the Evolution of Moving Cumulus in Daytime GOES Imagery. Mon. Weather Rev. 2006, 134, 49–78. [Google Scholar] [CrossRef]
- Mecikalski, J.R.; Bedka, K.M.; Paech, S.J.; Litten, L.A. A Statistical Evaluation of GOES Cloud-Top Properties for Nowcasting Convective Initiation. Mon. Weather Rev. 2008, 136, 4899–4914. [Google Scholar] [CrossRef]
- Walker, J.R.; MacKenzie, W.M.; Mecikalski, J.R.; Jewett, C.P. An Enhanced Geostationary Satellite–Based Convective Initiation Algorithm for 0–2-h Nowcasting with Object Tracking. J. Appl. Meteorol. Climatol. 2012, 51, 1931–1949. [Google Scholar] [CrossRef]
- Sieglaff, J.M.; Cronce, L.M.; Feltz, W.F.; Bedka, K.M.; Pavolonis, M.J.; Heidinger, A.K. Nowcasting Convective Storm Initiation Using Satellite-Based Box-Averaged Cloud-Top Cooling and Cloud-Type Trends. J. Appl. Meteorol. Climatol. 2011, 50, 110–126. [Google Scholar] [CrossRef]
- McGovern, A.; Elmore, K.L.; Gagne, D.J.; Haupt, S.E.; Karstens, C.D.; Lagerquist, R.; Smith, T.; Williams, J.K. Using Artificial Intelligence to Improve Real-Time Decision-Making for High-Impact Weather. Bull. Am. Meteorol. Soc. 2017, 98, 2073–2090. [Google Scholar] [CrossRef]
- Boukabara, S.-A.; Krasnopolsky, V.; Stewart, J.Q.; Maddy, E.S.; Shahroudi, N.; Hoffman, R.N. Leveraging Modern Artificial Intelligence for Remote Sensing and NWP: Benefits and Challenges. Bull. Am. Meteor. Soc. 2019, 100, ES473–ES491. [Google Scholar] [CrossRef]
- Gagne, D.J.; McGovern, A.; Xue, M. Machine Learning Enhancement of Storm-Scale Ensemble Probabilistic Quantitative Precipitation Forecasts. Weather Forecast. 2014, 29, 1024–1043. [Google Scholar] [CrossRef]
- Mecikalski, J.R.; Williams, J.K.; Jewett, C.P.; Ahijevych, D.; LeRoy, A.; Walker, J.R. Probabilistic 0–1-h Convective Initiation Nowcasts That Combine Geostationary Satellite Observations and Numerical Weather Prediction Model Data. J. Appl. Meteorol. Climatol. 2015, 54, 1039–1059. [Google Scholar] [CrossRef]
- Han, D.; Lee, J.; Im, J.; Sim, S.; Lee, S.; Han, H. A Novel Framework of Detecting Convective Initiation Combining Automated Sampling, Machine Learning, and Repeated Model Tuning from Geostationary Satellite Data. Remote Sens. 2019, 11, 1454. [Google Scholar] [CrossRef]
- Sun, F.; Qin, D.; Min, M.; Li, B.; Wang, F. Convective Initiation Nowcasting Over China from Fengyun-4A Measurements Based on TV-L 1 Optical Flow and BP_Adaboost Neural Network Algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4284–4296. [Google Scholar] [CrossRef]
- Zhou, K.; Zheng, Y.; Li, B.; Dong, W.; Zhang, X. Forecasting Different Types of Convective Weather: A Deep Learning Approach. J. Meteorol. Res. 2019, 33, 797–809. [Google Scholar] [CrossRef]
- Horn, B.K.; Schunck, B.G. Determining Optical Flow. In Proceedings of the Techniques and Applications of Image Understanding. Int. Soc. Opt. Photonics 1981, 281, 319–331. [Google Scholar]
- Bowler, N.E.; Pierce, C.E.; Seed, A. Development of a Precipitation Nowcasting Algorithm Based upon Optical Flow Techniques. J. Hydrol. 2004, 288, 74–91. [Google Scholar] [CrossRef]
- Li, L.; He, Z.; Chen, S.; Mai, X.; Zhang, A.; Hu, B.; Li, Z.; Tong, X. Subpixel-Based Precipitation Nowcasting with the Pyramid Lucas–Kanade Optical Flow Technique. Atmosphere 2018, 9, 260. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, H.-Q.; Lin, Y.-J.; Zhuang, Y.-Z.; Zhang, Y. Deriving AMVs from Geostationary Satellite Images Using Optical Flow Algorithm Based on Polynomial Expansion. J. Atmos. Ocean. Technol. 2016, 33, 1727–1747. [Google Scholar] [CrossRef]
- Cintineo, J.L.; Pavolonis, M.J.; Sieglaff, J.M.; Cronce, L.; Brunner, J. NOAA ProbSevere v2. 0—ProbHail, ProbWind, and ProbTor. Weather Forecast. 2020, 35, 1523–1543. [Google Scholar] [CrossRef]
- Liu, Z.; Min, M.; Li, J.; Sun, F.; Di, D.; Ai, Y.; Li, Z.; Qin, D.; Li, G.; Lin, Y.; et al. Local Severe Storm Tracking and Warning in Pre-Convection Stage from the New Generation Geostationary Weather Satellite Measurements. Remote Sens. 2019, 11, 383. [Google Scholar] [CrossRef]
- Schmit, T.J.; Griffith, P.; Gunshor, M.M.; Daniels, J.M.; Goodman, S.J.; Lebair, W.J. A Closer Look at the ABI on the GOES-R Series. Bull. Am. Meteor. Soc. 2017, 98, 681–698. [Google Scholar] [CrossRef]
- Schmit, T.J.; Lindstrom, S.S.; Gerth, J.J.; Gunshor, M.M. Applications of the 16 Spectral Bands on the Advanced Baseline Imager (ABI). J. Oper. Meteor. 2018, 6, 33–46. [Google Scholar] [CrossRef]
- Kanamitsu, M. Description of the NMC Global Data Assimilation and Forecast System. Weather Forecast. 1989, 4, 335–342. [Google Scholar] [CrossRef]
- Franzke, C.L.E.; Torelló i Sentelles, H. Risk of extreme high fatalities due to weather and climate hazards and its connection to large-scale climate variability. Clim. Chang. 2020, 162, 507–525. [Google Scholar] [CrossRef]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A Method That Produces Global Precipitation Estimates from Passive Microwave and Infrared Data at High Spatial and Temporal Resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Xie, P.; Yoo, S.-H.; Joyce, R.; Yarosh, Y. Bias-Corrected CMORPH: A 13-Year Analysis of High-Resolution Global Precipitation. Geophys. Res. Abstr. 2011, 13, EGU2011-1809. [Google Scholar]
- Xie, P.; Joyce, R.; Wu, S.; Yoo, S.-H.; Yarosh, Y.; Sun, F.; Lin, R. Reprocessed, Bias-Corrected CMORPH Global High-Resolution Precipitation Estimates from 1998. J. Hydrometeorol. 2017, 18, 1617–1641. [Google Scholar] [CrossRef]
- Habib, E.; Haile, A.T.; Tian, Y.; Joyce, R.J. Evaluation of the High-Resolution CMORPH Satellite Rainfall Product Using Dense Rain Gauge Observations and Radar-Based Estimates. J. Hydrometeorol. 2012, 13, 1784–1798. [Google Scholar] [CrossRef]
- Liu, J.; Xia, J.; She, D.; Li, L.; Wang, Q.; Zou, L. Evaluation of Six Satellite-Based Precipitation Products and Their Ability for Capturing Characteristics of Extreme Precipitation Events over a Climate Transition Area in China. Remote Sens. 2019, 11, 1477. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Brandimarte, L.; Amaranto, A. Evaluating Precipitation Datasets for Large-Scale Distributed Hydrological Modelling. J. Hydrol. 2019, 578, 124076. [Google Scholar] [CrossRef]
- Su, J.; Lü, H.; Wang, J.; Sadeghi, A.M.; Zhu, Y. Evaluating the Applicability of Four Latest Satellite–Gauge Combined Precipitation Estimates for Extreme Precipitation and Streamflow Predictions over the Upper Yellow River Basins in China. Remote Sens. 2017, 9, 1176. [Google Scholar] [CrossRef]
- Morel, C.; Orain, F.; Senesi, S. Building upon SAF-NWC Products: Use of the Rapid Developing Thunderstorms (RDT) Product in Météo-France Nowcasting Tools. In Proceedings of the Meteorological Satellite Data Users’, Dublin, Ireland, 2–6 September 2002; pp. 248–255. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Wagner, T.J.; Feltz, W.F.; Ackerman, S.A. The temporal evolution of convective indices in storm-producing environments. Weather Forecast. 2008, 23, 786–794. [Google Scholar] [CrossRef]
- Liu, W.; Li, X. Life Cycle Characteristics of Warm-Season Severe Thunderstorms in Central United States from 2010 to 2014. Climate 2016, 4, 45. [Google Scholar] [CrossRef]
- Farnebäck, G. Two-Frame Motion Estimation Based on Polynomial Expansion. In Image Analysis; Bigun, J., Gustavsson, T., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2749, pp. 363–370. ISBN 978-3-540-40601-3. [Google Scholar]
- AMS Glossary Glossary of Meteorology, American Meteorological Society. 2012. Available online: https://glossary.ametsoc.org/wiki/Rain (accessed on 17 February 2022).
- Li, Z.; Ma, Z.; Wang, P.; Lim, A.H.; Li, J.; Jung, J.A.; Schmit, T.J.; Huang, H.-L. An Objective Quality Control of Surface Contamination Observations for ABI Water Vapor Radiance Assimilation. J. Geophys. Res. Atmos. 2022, 127, e2021JD036061. [Google Scholar] [CrossRef]
- Min, M.; Bai, C.; Guo, J.; Sun, F.; Liu, C.; Wang, F.; Xu, H.; Tang, S.; Li, B.; Di, D.; et al. Estimating Summertime Precipitation from Himawari-8 and Global Forecast System Based on Machine Learning. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2557–2570. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Sun, Y.; Wong, A.K.; Kamel, M.S. Classification of Imbalanced Data: A Review. Int. J. Pattern Recognit. Artif. Intell. 2009, 23, 687–719. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. Elements of Statistical Learning, 2nd ed.; Springer: New York, NY, USA, 2009. [Google Scholar]
- Schmetz, J.; Tjemkes, S.; Gube, M.; Van de Berg, L. Monitoring Deep Convection and Convective Overshooting with METEOSAT. Adv. Space Res. 1997, 19, 433–441. [Google Scholar] [CrossRef]
- Ai, Y.; Li, J.; Shi, W.; Schmit, T.J.; Cao, C.; Li, W. Deep Convective Cloud Characterizations from Both Broadband Imager and Hyperspectral Infrared Sounder Measurements. J. Geophys. Res. Atmos. 2017, 122, 1700–1712. [Google Scholar] [CrossRef]
- Gong, X.; Li, Z.; Li, J.; Moeller, C.; Wang, W. Monitoring the VIIRS Sensor Data Records reflective solar band calibrations using DCC with collocated CrIS measurements. J. Geophys. Res. Atmos. 2019, 124, 8688–8706. [Google Scholar] [CrossRef]
- Aumann, H.H.; Desouza-Machado, S.G.; Behrangi, A. Deep Convective Clouds at the Tropopause. Atmos. Chem. Phys. 2011, 11, 1167–1176. [Google Scholar] [CrossRef]
- Liu, H.; Collard, A.; Derber, J.C.; Jung, J.A. Evaluation of GOES-16 clear-sky radiance (CSR) data and preliminary assimilation results at NCEP. In Proceedings of the 2019 Joint Satellite Conference, Boston, MA, USA, 30 September–4 October 2019. [Google Scholar]
- Liu, H.; Collard, A.; Derber, J.C.; Jung, J.A. Clear-Sky Radiance (CSR) Assimilation from Geostationary Infrared Imagers at NCEP. In Proceedings of the International TOVS Study Conference XXII, Saint-Sauveur, QC, Canada, 31 October–6 November 2019. [Google Scholar]
- Genkova, I.; Thomas, C.; Kleist, D.; Daniels, J.; Apodaka, K.; Santek, D.; Cucurull, L. Winds Development and Use in the NCEP GFS Data Assimilation System. In Proceedings of the International Winds Workshops 15 (IWW15), Virtual, 12–16 April 2021. [Google Scholar]
- Smith, W.; Zhang, Q.; Shao, M.; Weisz, E. Improved Severe Weather Forecasts Using LEO and GEO Satellite Soundings. J. Atmos. Ocean. Technol. 2020, 37, 1203–1218. [Google Scholar] [CrossRef]
- Li, J.; Liu, C.-Y.; Zhang, P.; Schmit, T.J. Applications of Full Spatial Resolution Space-Based Advanced Infrared Soundings in the Preconvection Environment. Weather Forecast. 2012, 27, 515–524. [Google Scholar] [CrossRef]
- Li, J.; Li, J.; Otkin, J.; Schmit, T.J.; Liu, C.-Y. Warning Information in a Preconvection Environment from the Geostationary Advanced Infrared Sounding System—A Simulation Study Using the IHOP Case. J. Appl. Meteorol. Climatol. 2011, 50, 776–783. [Google Scholar] [CrossRef]
- Di, D.; Li, J.; Li, Z.; Li, J.; Schmit, T.J.; Menzel, W.P. Can Current Hyperspectral Infrared Sounders Capture the Small Scale Atmospheric Water Vapor Spatial Variations? Geophys. Res. Lett. 2021, 48, e2021GL095825. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Holmlund, K.; Grandell, J.; Schmetz, J.; Stuhlmann, R.; Bojkov, B.; Munro, R.; Lekouara, M.; Coppens, D.; Viticchie, B.; August, T.; et al. Meteosat Third Generation (MTG): Continuation and Innovation of Observations from Geostationary Orbit. Bull. Am. Meteorol. Soc. 2021, 102, E990–E1015. [Google Scholar] [CrossRef]
- Adkins, J.; Alsheimer, F.; Ardanuy, P.; Boukabara, S.; Casey, S.; Coakley, M.; Conran, J.; Cucurull, L.; Daniels, J.; Ditchek, S.D.; et al. Geostationary Extended Observations (GeoXO) Hyperspectral InfraRed Sounder Value Assessment Report; NOAA/NESDIS Technical Report; National Oceanic and Atmospheric Administration (NOAA): Washington, DC, USA, 2021; 103p. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Variable 1 | Feature |
|---|---|---|
| ABI CONUS | Maximum cooling rate (R1 and R2) | Cloud-top cooling rate |
| Area | Candidate size | |
| BT10.3 | Window channel brightness temperature | |
| BT difference (3.9–10.3) | Channel difference in brightness temperature | |
| BT difference (6.2–10.3) | ||
| BT difference (6.9–10.3) | ||
| BT difference (7.3–10.3) | ||
| BT difference (8.4–10.3) | ||
| BT difference (9.6–10.3) | ||
| BT difference (11.2–10.3) | ||
| BT difference (12.3–10.3) | ||
| BT difference (13.3–10.3) | ||
| BT difference (3.9–7.3) | ||
| BT difference (3.9–11.2) | ||
| BT difference (8.4–11.2) | ||
| BT difference (11.2–12.3) | ||
| GFS NWP | T (temperature) | Basic profiles on pressure levels between 500 and 925 hPa |
| MR (Water vapor mixing ratio) | ||
| DIV (divergence) | Characteristics of low-level atmosphere on 850 and 925 hPa | |
| (pseudo-equivalent potential temperature) | ||
| DIV10 (divergence at 10 m above surface) | Surface and near-surface information | |
| Tsur (surface temperature) | ||
| PV (potential vorticity) | PV on isentropic surface = 320 K | |
| K-index | General information of atmospheric instabilities and moisture | |
| CAPE (convection available potential energy) | ||
| LI (lifted index) | ||
| CIN (convective inhibition) | ||
| EBS (effective bulk shear) | ||
| TPW (total precipitable water) |
| Dataset | Weak/None | Moderate | Severe | Total |
|---|---|---|---|---|
| Training | 605,223 | 19,209 | 17,257 | 641,689 |
| Validation | 151,274 | 4887 | 4262 | 160,423 |
| Overall | 756,497 | 24,096 | 21,519 | 802,112 |
| Scenario 1 | Classification | Sampling 2 | OOB Score 3 | Validation Accuracy 4 |
|---|---|---|---|---|
| 3CUB | Triple | Original | 0.951 (0.0003) | 0.951 (0.0002) |
| 3CBA | Triple | Balanced | 0.663 (0.0053) | 0.794 (0.0022) |
| 2CUB | Double | Original | 0.978 (0.0001) | 0.979 (0.0001) |
| 2CBA | Double | Balanced | 0.876 (0.0016) | 0.867 (0.0016) |
| Observation | |||
|---|---|---|---|
| True | False | ||
| Prediction | True | A | C |
| False | B | D | |
| Metric | Full Name | Formula | Range | Optimal |
|---|---|---|---|---|
| POD | Probability of Detection | A/(A + B) | [0, 1] | 1 |
| FAR | False Alarm Rate | C/(A + C) | [0, 1] | 0 |
| CSI | Critical Success Index | A/(A + B + C) | [0, 1] | 1 |
| Scenario | Class | POD | FAR | CSI |
|---|---|---|---|---|
| 3CUB | Weak/None | 0.99 | 0.04 | 0.95 |
| Moderate | 0.03 | 0.55 | 0.03 | |
| Severe | 0.39 | 0.35 | 0.32 | |
| 3CBA | Weak/None | 0.81 | 0.01 | 0.80 |
| Moderate | 0.58 | 0.90 | 0.09 | |
| Severe | 0.63 | 0.66 | 0.28 | |
| 2CUB | Non-Severe | 0.99 | 0.02 | 0.98 |
| Severe | 0.31 | 0.25 | 0.28 | |
| 2CBA | Non-Severe | 0.87 | 0.01 | 0.87 |
| Severe | 0.90 | 0.84 | 0.15 | |
| Ensembled for Severe (3CBA + 2CBA) | Severe | 0.90 | 0.58 | 0.40 |
| Model | Data Source | Variable Score | Ranking | Variable Score | Ranking | Total Score from the Source |
|---|---|---|---|---|---|---|
| 3CBA | ABI | dBT (6.2–10.3) max = 0.0346 | 1 | dBT (13.3–10.3) max = 0.0285 | 6 | 0.610 |
| dBT (7.3–10.3) max = 0.0327 | 2 | BT (10.3) mean = 0.0210 | 7 | |||
| dBT (6.9–10.3) max = 0.0319 | 3 | Area = 0.0175 | 9 | |||
| dBT (9.6–10.3) max = 0.0309 | 4 | dBT (11.2–12.3) min = 0.0174 | 10 | |||
| BT (10.3) min = 0.0292 | 5 | dBT (7.3–10.3) mean = 0.0170 | 11 | |||
| GFS NWP | K-index max = 0.0178 | 8 | DIV (925) min = 0.0128 | 25 | 0.390 | |
| MR (850) max = 0.0156 | 15 | LI min = 0.0109 | 28 | |||
| DIV (10m) min = 0.0150 | 18 | CIN max = 0.0107 | 31 | |||
| Ɵse (850) max = 0.0131 | 23 | TPW max = 0.0104 | 34 | |||
| K-index mean = 0.0129 | 24 | Ɵse (850) mean = 0.0104 | 36 | |||
| 2CBA | ABI | dBT (6.2–10.3) max = 0.1804 | 1 | dBT (6.9–10.3) max = 0.0291 | 7 | 0.721 |
| dBT (9.6–10.3) max = 0.1706 | 2 | Cooling rate (R2) = 0.0095 | 12 | |||
| dBT (7.3–10.3) max = 0.0654 | 3 | dBT (3.9–11.2) max = 0.0088 | 13 | |||
| BT (10.3) min = 0.0607 | 4 | Area = 0.0077 | 15 | |||
| dBT (13.3–10.3) max = 0.0315 | 5 | dBT (11.2–12.3) min = 0.0071 | 17 | |||
| GFS NWP | Ɵse (850) max = 0.0314 | 6 | TPW max = 0.0080 | 14 | 0.279 | |
| K-index max = 0.0221 | 8 | DIV (925) min = 0.0073 | 16 | |||
| MR (850) max = 0.0197 | 9 | DIV (10m) mean = 0.0069 | 18 | |||
| DIV (10m) min = 0.0166 | 10 | LI min = 0.0068 | 20 | |||
| CIN max = 0.0124 | 11 | K-index mean = 0.0068 | 21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Li, Z.; Li, J.; Min, M.; Sun, J.; Wei, X.; Schmit, T.J.; Cucurull, L. An Enhanced Storm Warning and Nowcasting Model in Pre-Convection Environments. Remote Sens. 2023, 15, 2672. https://doi.org/10.3390/rs15102672
Ma Z, Li Z, Li J, Min M, Sun J, Wei X, Schmit TJ, Cucurull L. An Enhanced Storm Warning and Nowcasting Model in Pre-Convection Environments. Remote Sensing. 2023; 15(10):2672. https://doi.org/10.3390/rs15102672
Chicago/Turabian StyleMa, Zheng, Zhenglong Li, Jun Li, Min Min, Jianhua Sun, Xiaocheng Wei, Timothy J. Schmit, and Lidia Cucurull. 2023. "An Enhanced Storm Warning and Nowcasting Model in Pre-Convection Environments" Remote Sensing 15, no. 10: 2672. https://doi.org/10.3390/rs15102672
APA StyleMa, Z., Li, Z., Li, J., Min, M., Sun, J., Wei, X., Schmit, T. J., & Cucurull, L. (2023). An Enhanced Storm Warning and Nowcasting Model in Pre-Convection Environments. Remote Sensing, 15(10), 2672. https://doi.org/10.3390/rs15102672