
SOLS: An Open-Source Spaceborne Oceanic Lidar Simulator


Abstract
:1. Introduction
2. Materials and Methods
2.1. Lidar Return Signal Model
2.2. Atmosphere Model
2.3. Hydrosol Model
2.4. Sea Surface and Seafloor Modeling
2.5. Background Light and Detector Noise Model
3. Results
3.1. Simulation for Spaceborne Lidar with Analog Detection
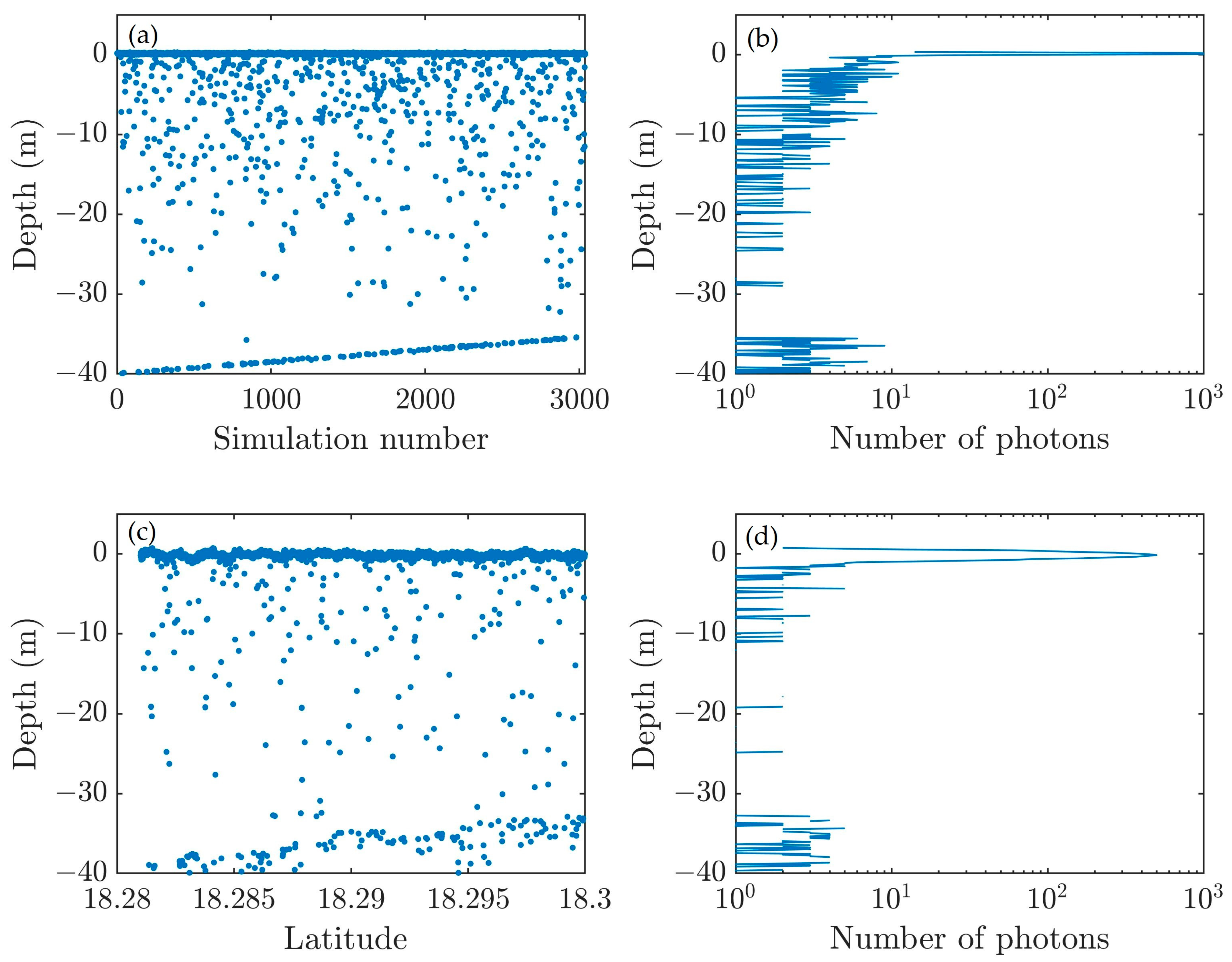
3.2. Simulation for Spaceborne Photon Counting Lidar with ICESat-2 Parameters
3.3. Simulation for Airborne Lidar with HawkEye System Parameters
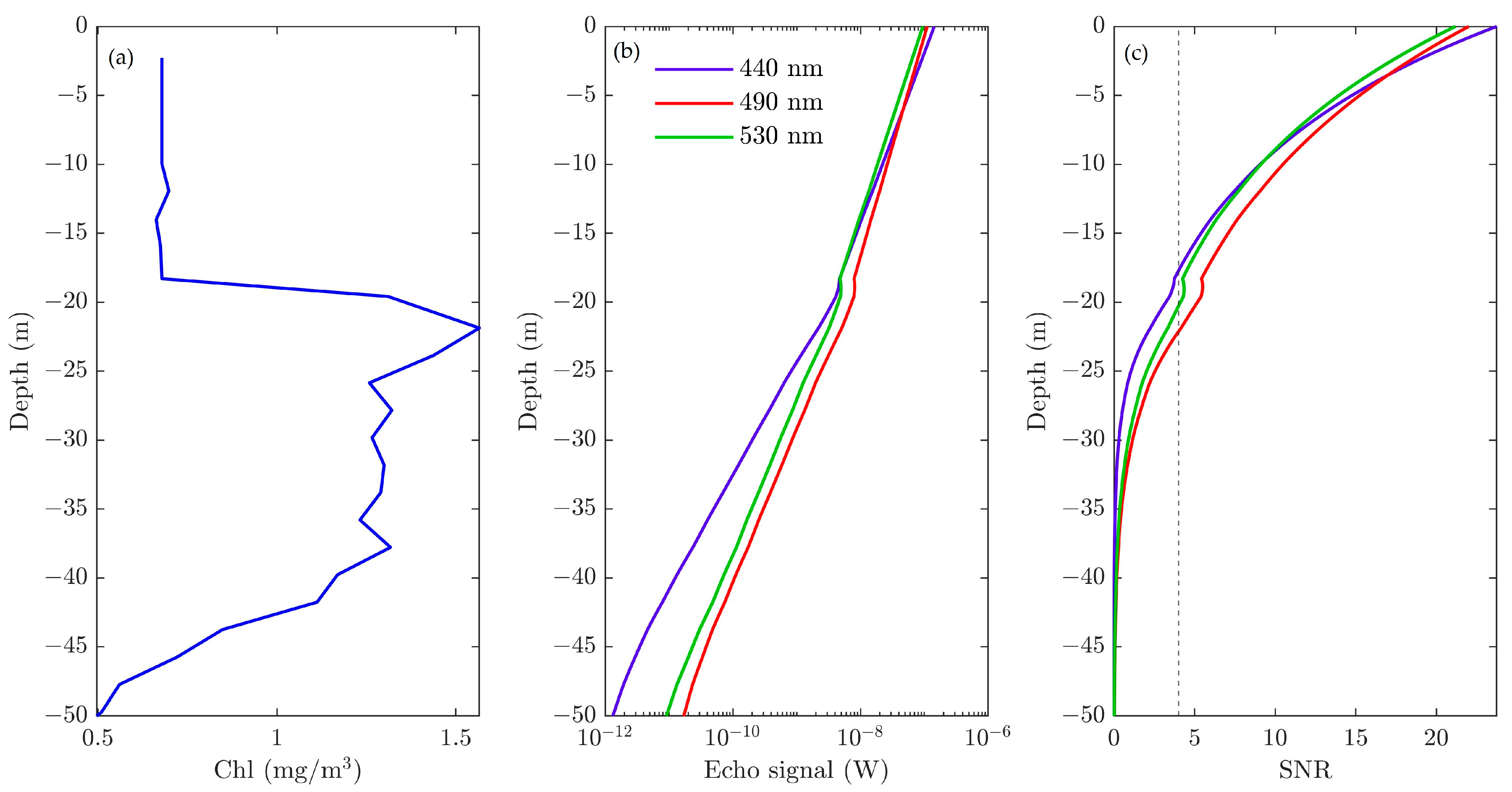
3.4. Simulation for Stratified Water with Bio-Argo Input Data
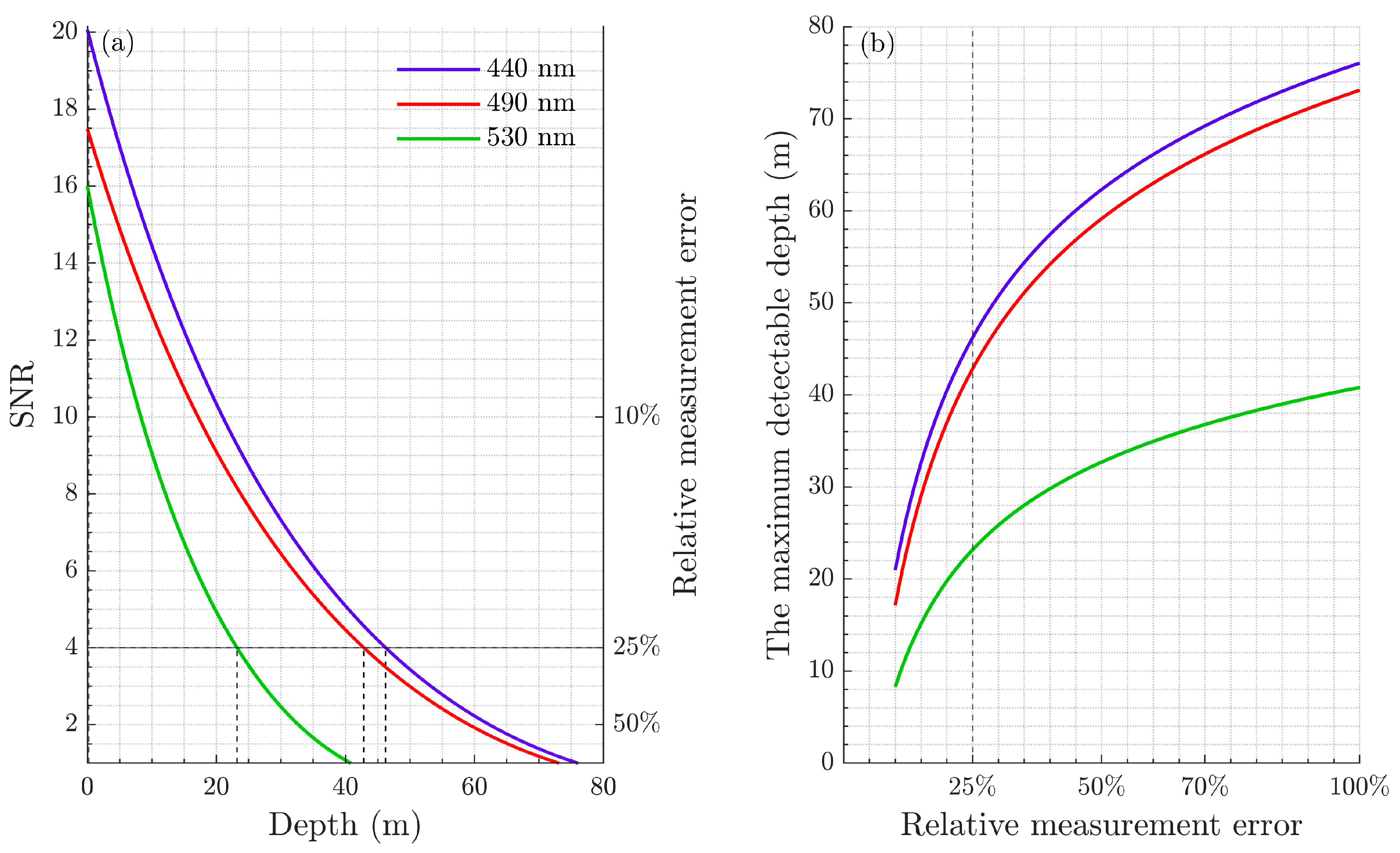
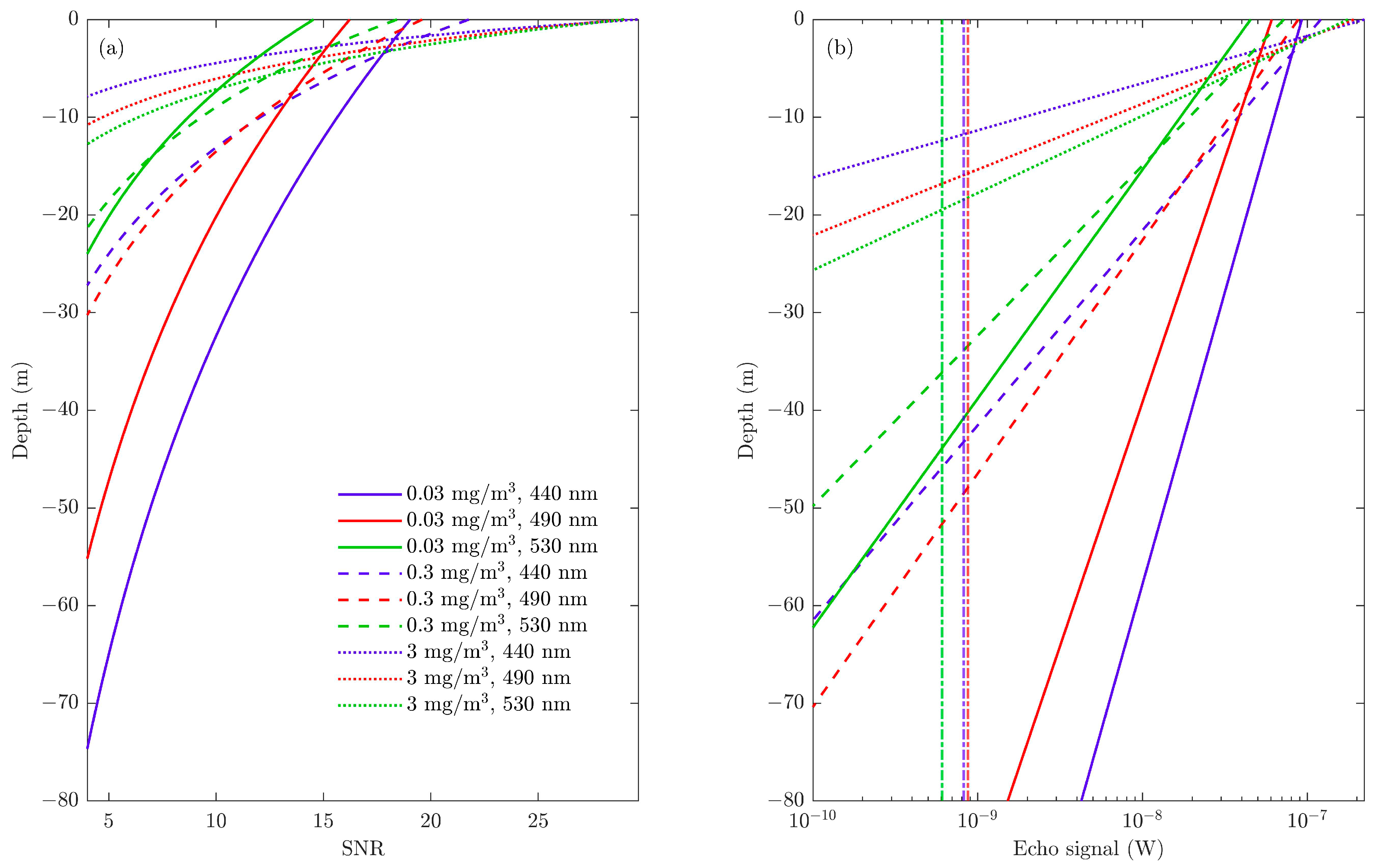
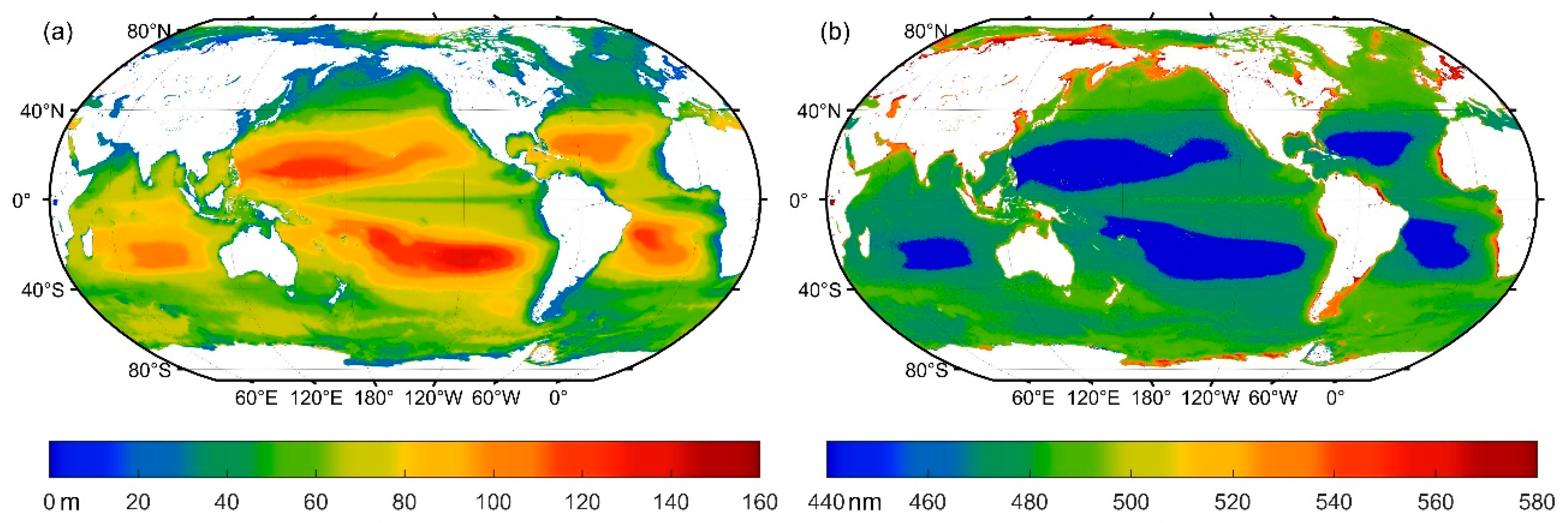
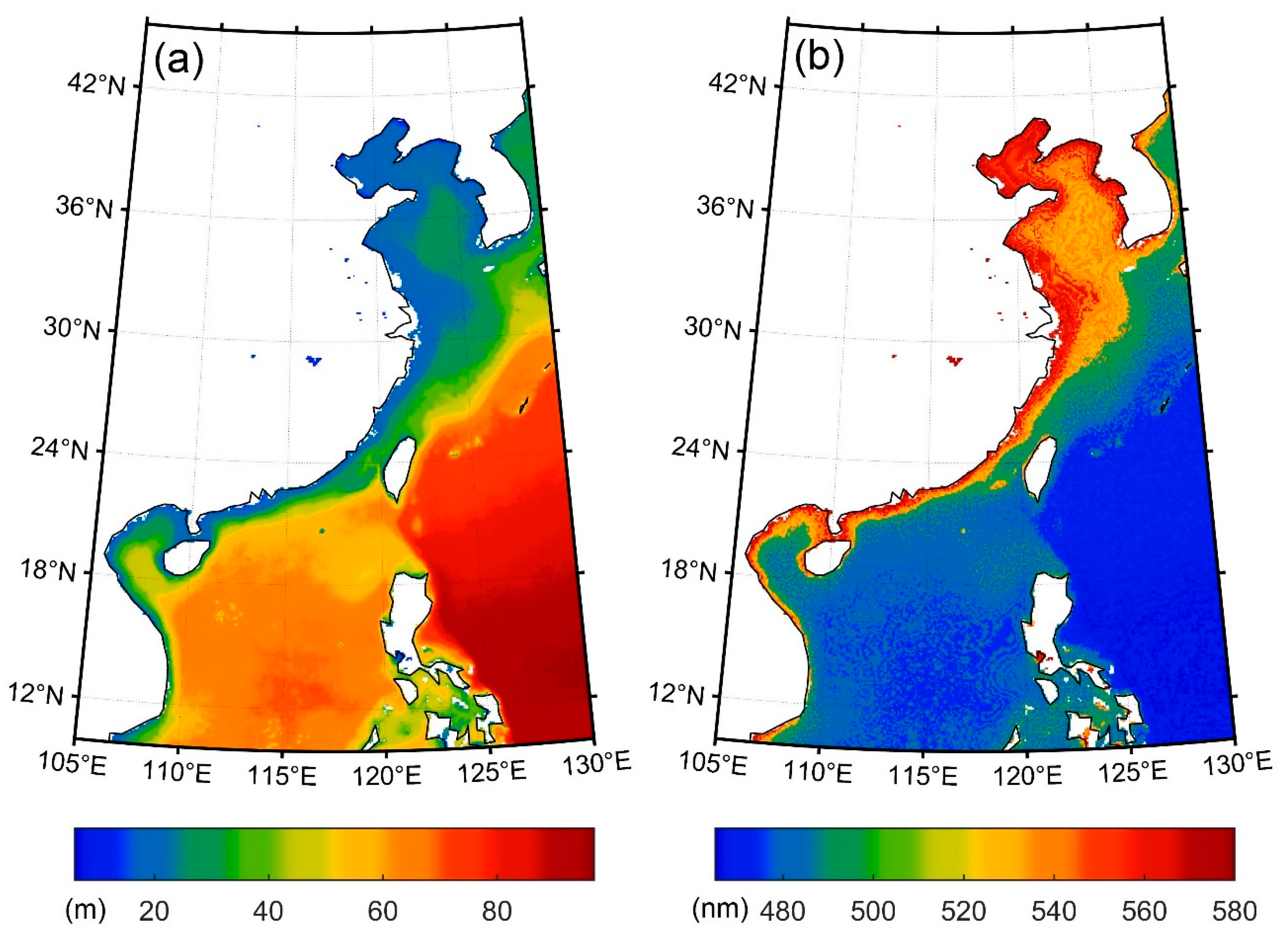
3.5. Maximum Detectable Depth and Corresponding Optimal Wavelength Analysis
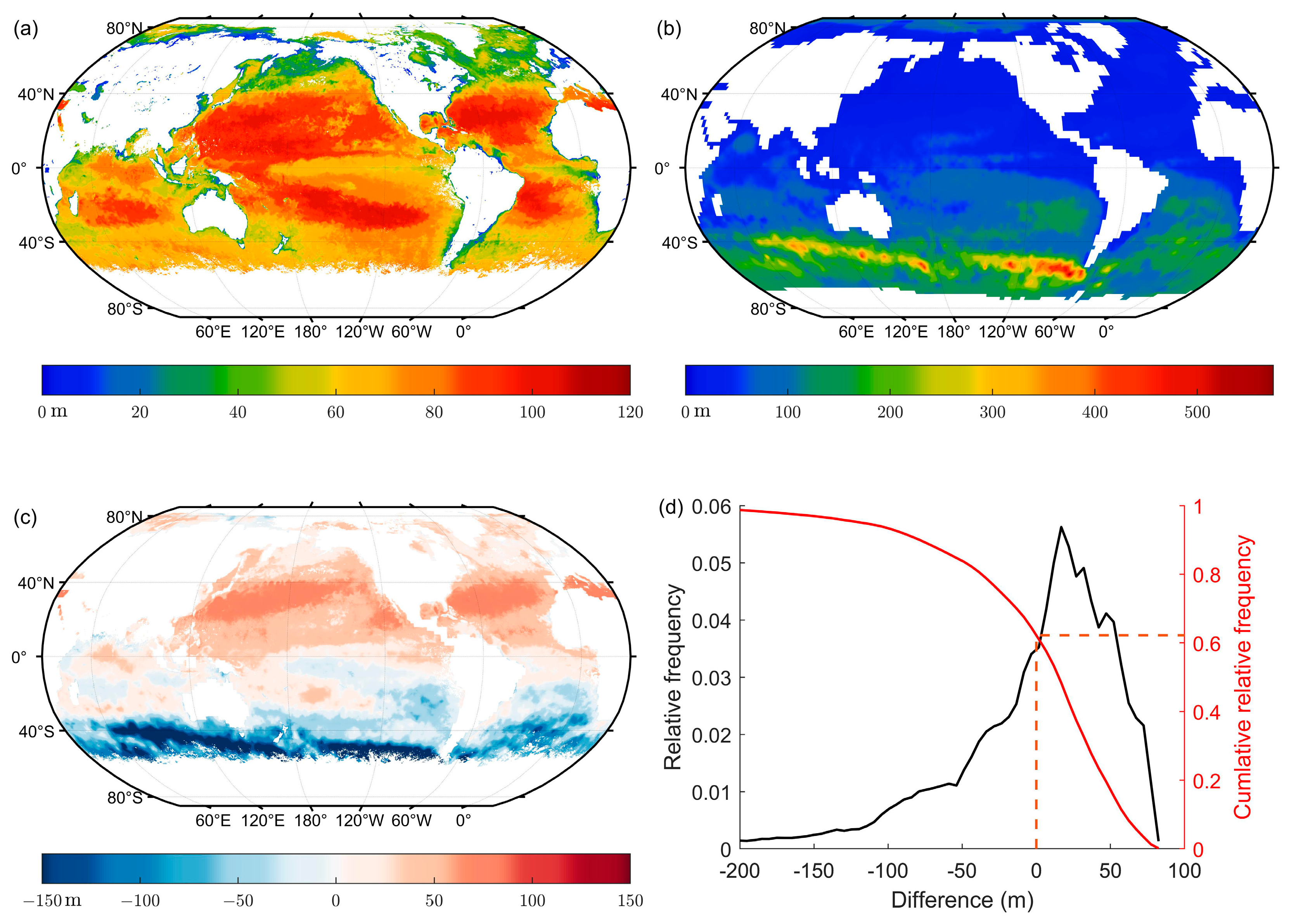
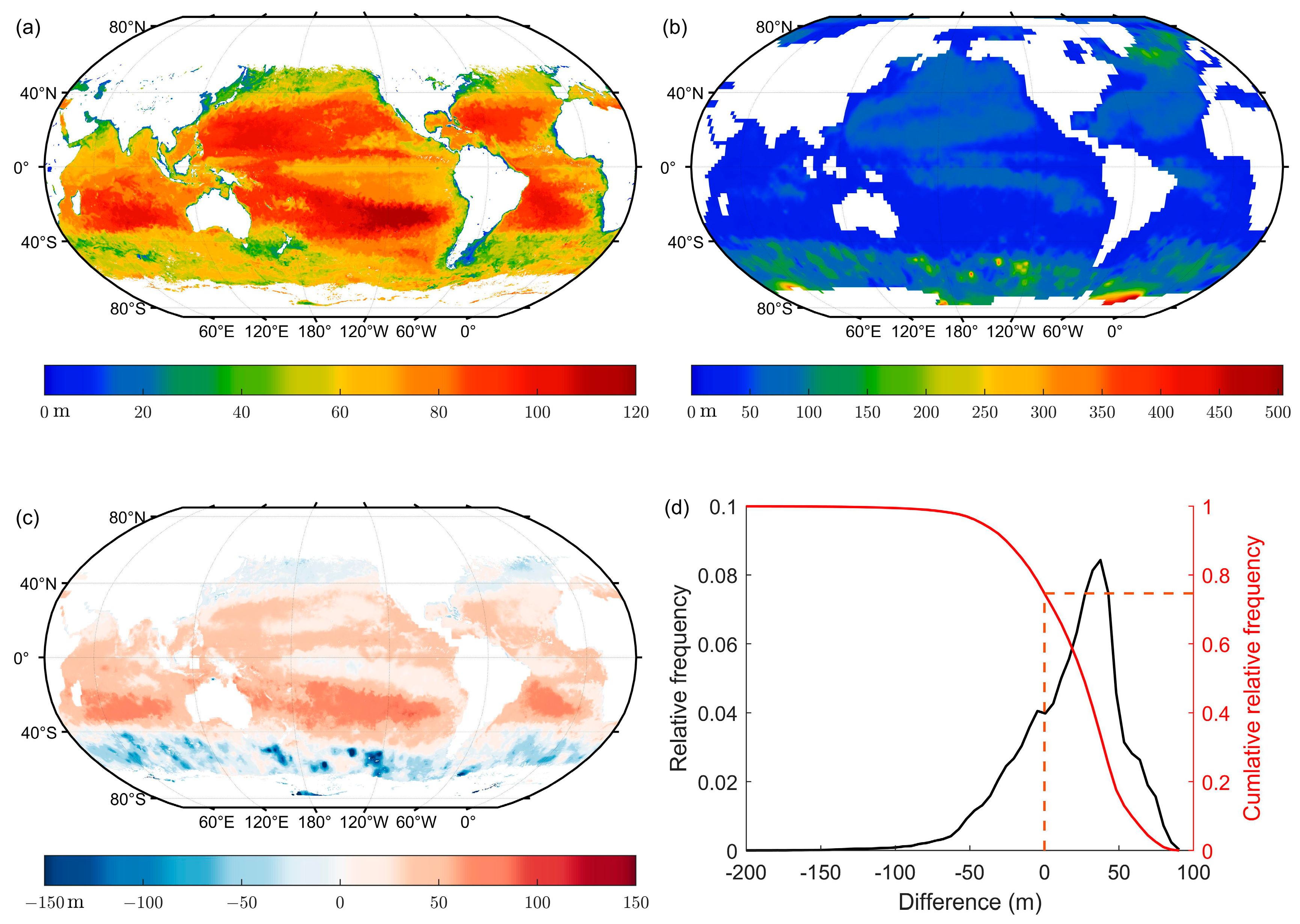
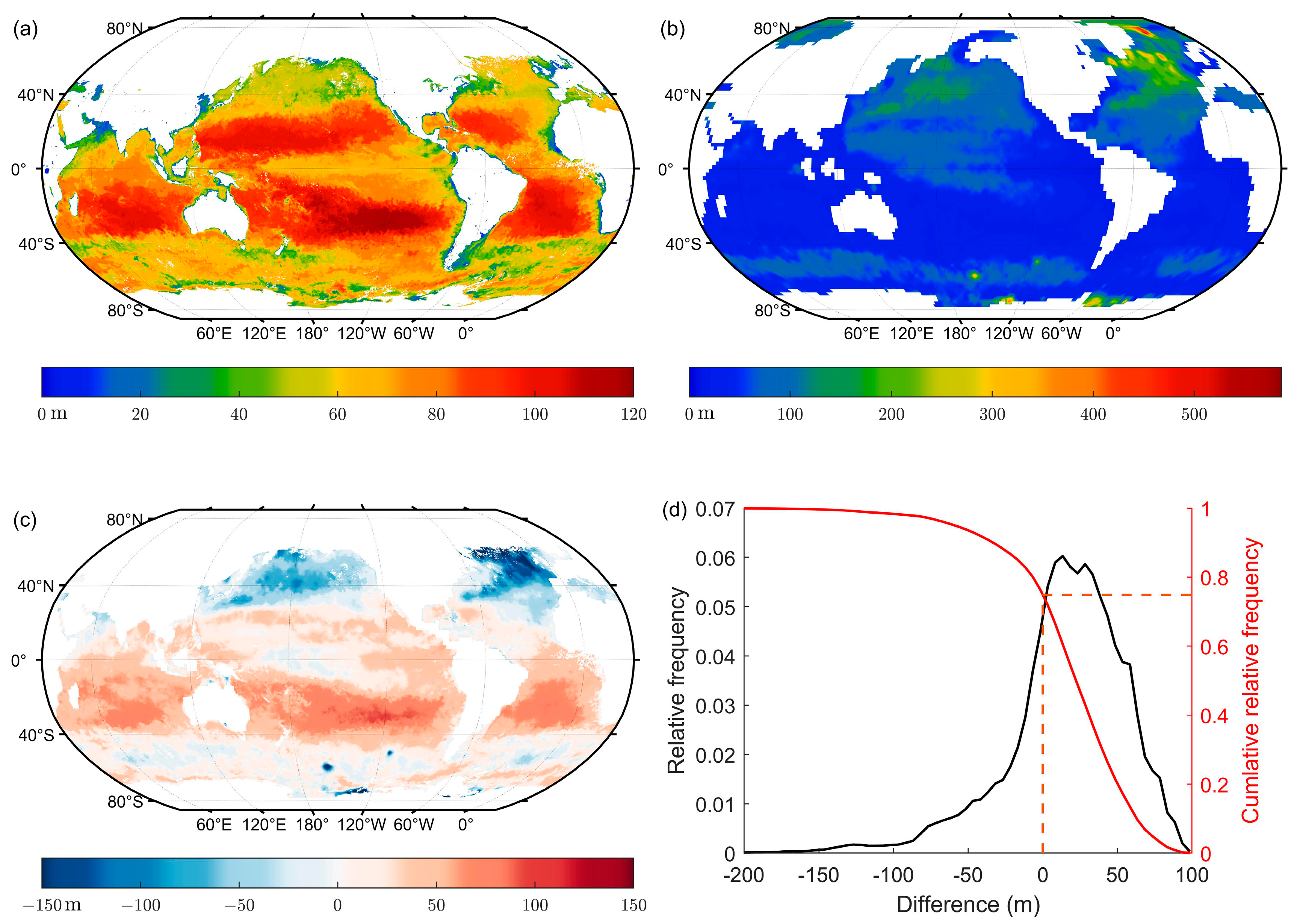
3.6. Difference of Penetration Depths during Day and at Night
4. Discussion
4.1. Lidar System Parameters’ Effects
4.1.1. Influence of Laser Energy and Lidar Geometry
4.1.2. Influence of Receiver Parameters
4.2. Eye Safety
4.3. Temporal and Spatial Variation of the Comparison between Lidar Maximum Detectable Depth and MLD
5. Conclusions
- (a)
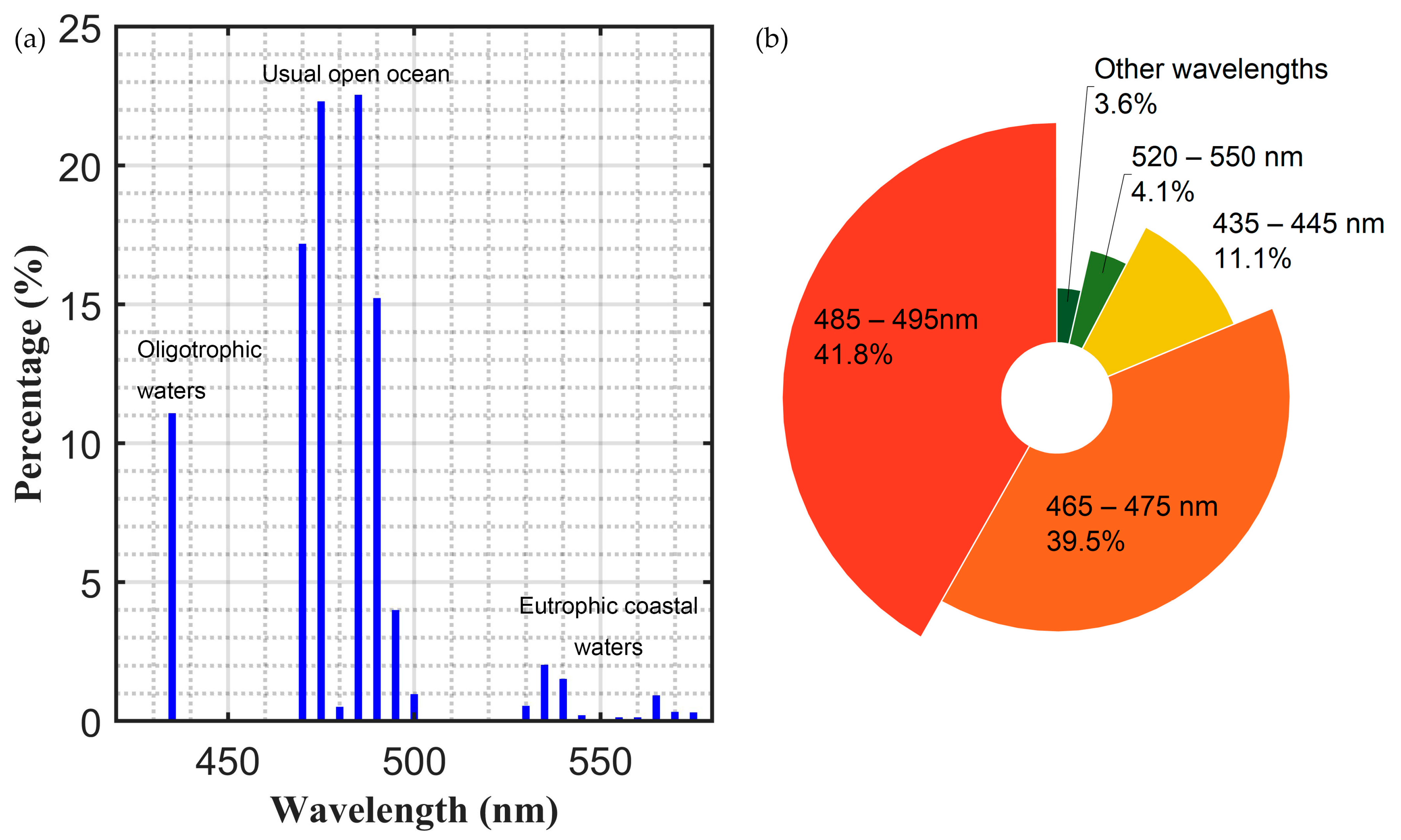
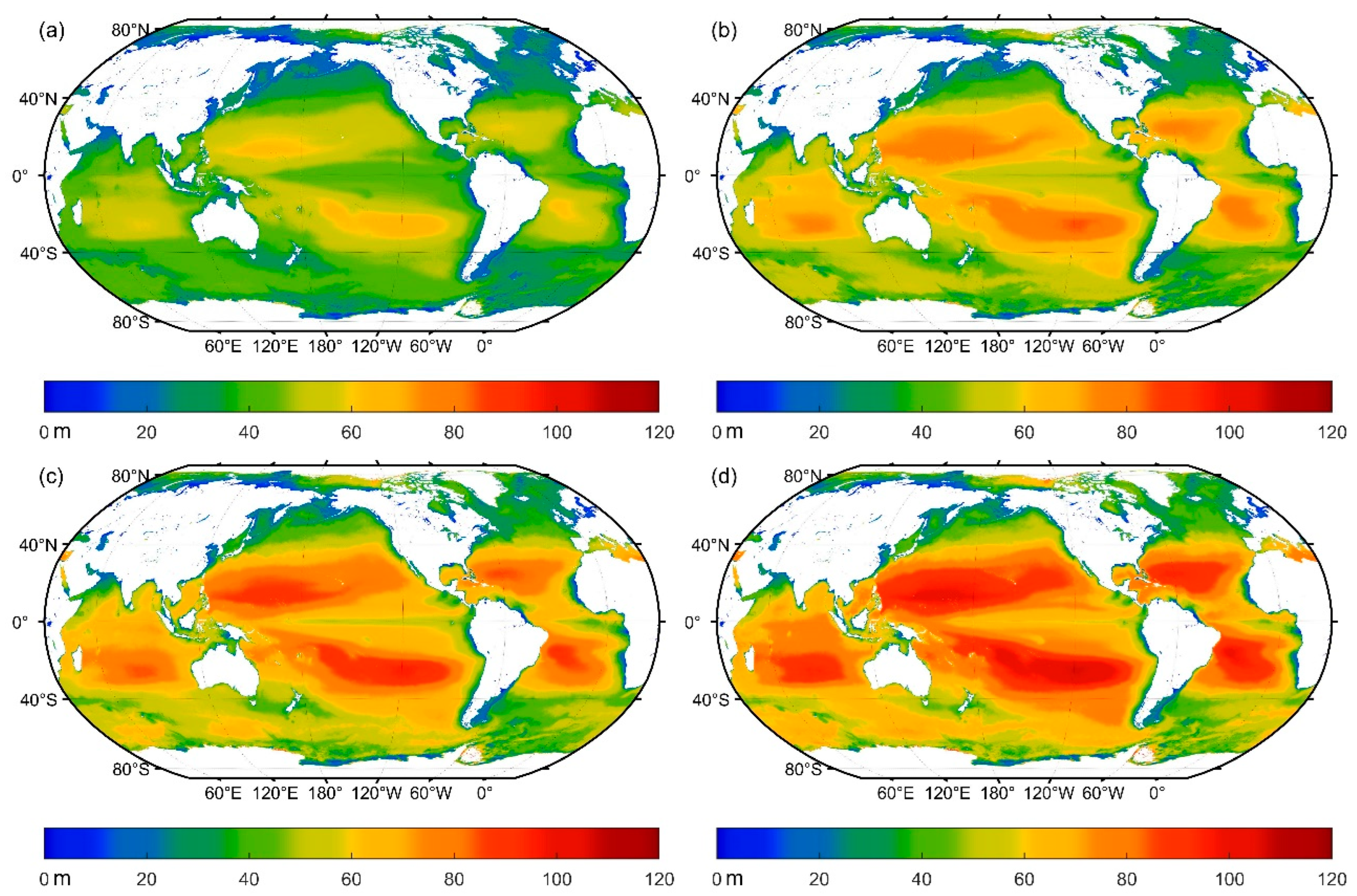
- Considering the development and technology of lasers, several wavelength ranges are listed for application: wavelengths between 465 and 495 nm are suitable for most of the global oceans; wavelengths between 530 and 540 nm can be used for coastal water detection, which has high primary productivity in marine ecosystems; and wavelengths between 425 and 435 nm have shown potential detection depth of deeper than 150 m in the oligotrophic sea on both sides of the equator. A combination of multiple wavelengths can be employed by future spaceborne lidar to improve its maximum detectable capability.
- (b)
- Considering the strong sea surface backscattering, it is better to tilt the laser beam at an angle to avoid direct reflection from the sea surface.
- (c)
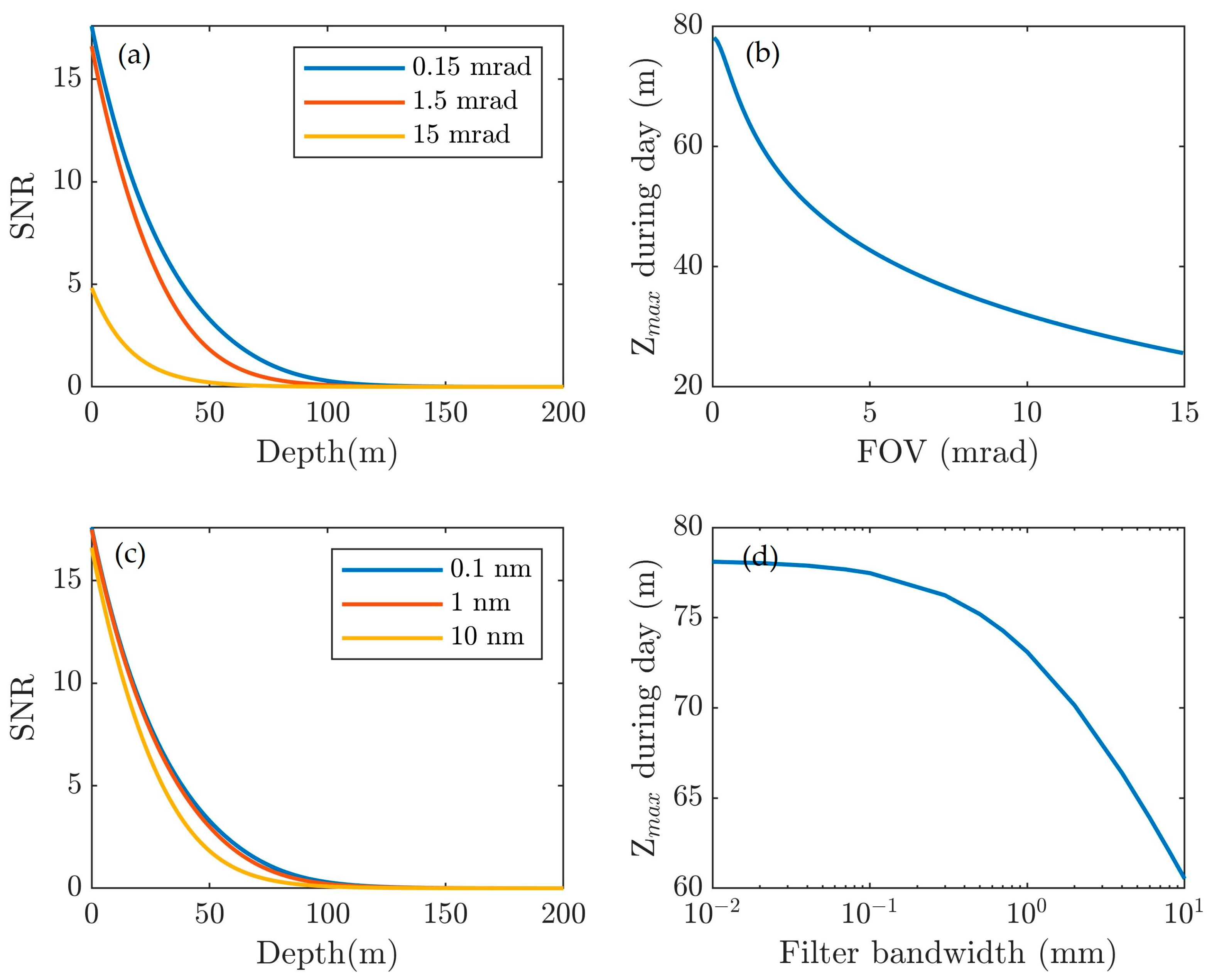
- With small enough FOVs and a filter bandwidth, the solar background radiance can be efficiently suppressed.
- (d)
- Polarization information is an important and complicated feature for LIDAR. In practice, it is difficult to simulate the complex, non-spherical particles found in the ocean. Therefore, the polarization feature was neglected in this paper, but this will be dealt with in the future.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- McClain, C.R. A Decade of Satellite Ocean Color Observations. Annu. Rev. Mar. Sci. 2009, 1, 19–42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stramski, D.; Reynolds, R.A.; Kahru, M.; Mitchell, B.G. Estimation of particulate organic carbon in the ocean from satellite remote sensing. Science 1999, 285, 239–242. [Google Scholar] [CrossRef]
- Behrenfeld, M.J.; Boss, E.; Siegel, D.A.; Shea, D.M. Carbon-based ocean productivity and phytoplankton physiology from space. Glob. Biogeochem. Cycles 2005, 19. [Google Scholar] [CrossRef]
- Hostetler, C.A.; Behrenfeld, M.J.; Hu, Y.; Hair, J.W.; Schulien, J.A. Spaceborne Lidar in the Study of Marine Systems. Ann. Rev. Mar. Sci. 2018, 10, 121–147. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Churnside, J.H. Review of profiling oceanographic lidar. Opt. Eng. 2014, 53, 051405. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Lee, Z.; Xie, Y.; Goes, J.; Shang, S.; Marra, J.F.; Lin, G.; Yang, L.; Huang, B. Reconciling Between Optical and Biological Determinants of the Euphotic Zone Depth. J. Geophys. Res. Ocean. 2021, 126. [Google Scholar] [CrossRef]
- Lee, Z.; Weidemann, A.; Kindle, J.; Arnone, R.; Carder, K.L.; Davis, C. Euphotic zone depth: Its derivation and implication to ocean-color remote sensing. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Jamet, C.; Ibrahim, A.; Ahmad, Z.; Angelini, F.; Babin, M.; Behrenfeld, M.J.; Boss, E.; Cairns, B.; Churnside, J.; Chowdhary, J.; et al. Going Beyond Standard Ocean Color Observations: Lidar and Polarimetry. Front. Mar. Sci. 2019, 6, 251. [Google Scholar] [CrossRef]
- Chen, P.; Pan, D. Ocean Optical Profiling in South China Sea Using Airborne LiDAR. Remote Sens. 2019, 11, 1826. [Google Scholar] [CrossRef] [Green Version]
- Churnside, J.; Marchbanks, R.; Lembke, C.; Beckler, J. Optical Backscattering Measured by Airborne Lidar and Underwater Glider. Remote Sens. 2017, 9, 379. [Google Scholar] [CrossRef] [Green Version]
- Churnside, J.; Hair, J.; Hostetler, C.; Scarino, A. Ocean Backscatter Profiling Using High-Spectral-Resolution Lidar and a Perturbation Retrieval. Remote Sens. 2018, 10, 2003. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Chen, P.; Mao, Z.; Pan, D.; He, Y. Subsurface plankton layers observed from airborne lidar in Sanya Bay, South China Sea. Opt. Express 2018, 26, 29134–29147. [Google Scholar] [CrossRef] [PubMed]
- Churnside, J.H.; Marchbanks, R.D. Subsurface plankton layers in the Arctic Ocean. Geophys. Res. Lett. 2015, 42, 4896–4902. [Google Scholar] [CrossRef]
- Churnside, J.H.; Donaghay, P.L. Thin scattering layers observed by airborne lidar. ICES J. Mar. Sci. 2009, 66, 778–789. [Google Scholar] [CrossRef]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Richter, K.; Maas, H.-G.; Westfeld, P.; Weiß, R. An Approach to Determining Turbidity and Correcting for Signal Attenuation in Airborne Lidar Bathymetry. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 31–40. [Google Scholar] [CrossRef]
- Lu, X.; Hu, Y.; Trepte, C.; Zeng, S.; Churnside, J.H. Ocean subsurface studies with the CALIPSO spaceborne lidar. J. Geophys. Res. Ocean. 2014, 119, 4305–4317. [Google Scholar] [CrossRef]
- Behrenfeld, M.J.; Gaube, P.; Della Penna, A.; O’Malley, R.T.; Burt, W.J.; Hu, Y.; Bontempi, P.S.; Steinberg, D.K.; Boss, E.S.; Siegel, D.A.; et al. Global satellite-observed daily vertical migrations of ocean animals. Nature 2019, 576, 257–261. [Google Scholar] [CrossRef]
- Dionisi, D.; Brando, V.E.; Volpe, G.; Colella, S.; Santoleri, R. Seasonal distributions of ocean particulate optical properties from spaceborne lidar measurements in Mediterranean and Black sea. Remote Sens. Environ. 2020, 247, 111889. [Google Scholar] [CrossRef]
- Lu, X.; Hu, Y.; Yang, Y.; Bontempi, P.; Omar, A.; Baize, R. Antarctic spring ice-edge blooms observed from space by ICESat-2. Remote Sens. Environ. 2020, 245, 111827. [Google Scholar] [CrossRef]
- Chen, G.; Tang, J.; Zhao, C.; Wu, S.; Yu, F.; Ma, C.; Xu, Y.; Chen, W.; Zhang, Y.; Liu, J.; et al. Concept Design of the “Guanlan” Science Mission: China’s Novel Contribution to Space Oceanography. Front. Mar. Sci. 2019, 6, 194. [Google Scholar] [CrossRef] [Green Version]
- Gray, D.J.; Anderson, J.; Nelson, J.; Edwards, J. Using a multiwavelength LiDAR for improved remote sensing of natural waters. Appl. Opt. 2015, 54, F232–F242. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Jamet, C.; Zhang, Z.; He, Y.; Mao, Z.; Pan, D.; Wang, T.; Liu, D.; Yuan, D. Vertical distribution of subsurface phytoplankton layer in South China Sea using airborne lidar. Remote Sens. Environ. 2021, 263, 112567. [Google Scholar] [CrossRef]
- Chen, P.; Mao, Z.; Zhang, Z.; Liu, H.; Pan, D. Detecting subsurface phytoplankton layer in Qiandao Lake using shipborne lidar. Opt. Express 2020, 28, 558–569. [Google Scholar] [CrossRef] [PubMed]
- Roddewig, M.R.; Pust, N.J.; Churnside, J.H.; Shaw, J.A. Dual-polarization airborne lidar for freshwater fisheries management and research. Opt. Eng. 2017, 56, 031221. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Xue, C.; Zhang, T.; Hu, L.; Chen, G.; Tang, J. Analysis of the Optimal Wavelength for Oceanographic Lidar at the Global Scale Based on the Inherent Optical Properties of Water. Remote Sens. 2019, 11, 2705. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Liu, D.; Zhu, X.; Zhou, Y.; Le, C.; Mao, Z.; Bai, J.; Bi, D.; Chen, P.; Chen, W.; et al. Optimum wavelength of spaceborne oceanic lidar in penetration depth. J. Quant. Spectrosc. Radiat. Transf. 2020, 256, 107310. [Google Scholar] [CrossRef]
- Jutzi, B.; Stilla, U. Range determination with waveform recording laser systems using a Wiener Filter. ISPRS J. Photogramm. Remote Sens. 2006, 61, 95–107. [Google Scholar] [CrossRef]
- Russell, P.B.; Morley, B.M.; Livingston, J.M.; Grams, G.W.; Patterson, E.M. Orbiting lidar simulations. 1: Aerosol and cloud measurements by an independent-wavelength technique. Appl. Opt. 1982, 21, 1541–1553. [Google Scholar] [CrossRef]
- Chance, K.; Kurucz, R.L. An improved high-resolution solar reference spectrum for earth’s atmosphere measurements in the ultraviolet, visible, and near infrared. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 1289–1295. [Google Scholar] [CrossRef]
- Hua, K.; Liu, B.; Fang, L.; Wang, H.; Chen, Z.; Yu, Y. Detection efficiency for underwater coaxial photon-counting lidar. Appl. Opt. 2020, 59, 2797–2809. [Google Scholar] [CrossRef] [PubMed]
- Elterman, L. Atmospheric Attenuation Model, 1964, in the Ultraviolet, Visible, and Infrared Regions for Altitudes to 50 km; Air Force Cambridge Research Laboratories, Office of Aerospace Research: Bedford, MA, USA, 1964. [Google Scholar]
- National Aeronautics and Space Administration. Standard Atmosphere. In National Aeronautics and Space Administration; United States Air Force: Washington, DC, USA, 1976. [Google Scholar]
- Sasano, Y.; Kobayashi, T. Feasibility study on space lidars for measuring global atmospheric environment. Tokyo Optoelectron. Ind. Technol. Dev. Assoc. 1995, 4, F-82. [Google Scholar]
- Morel, A.; Maritorena, S. Bio-optical properties of oceanic waters: A reappraisal. J. Geophys. Res. Ocean. 2001, 106, 7163–7180. [Google Scholar] [CrossRef] [Green Version]
- Morel, A. Optical properties of pure water and pure sea water. Opt. Asp. Oceanogr. 1974, 1, 1–24. [Google Scholar]
- Sullivan, J.M.; Twardowski, M.S. Angular shape of the oceanic particulate volume scattering function in the backward direction. Appl. Opt. 2009, 48, 6811–6819. [Google Scholar] [CrossRef]
- Pope, R.M.; Fry, E.S. Absorption spectrum (380–700 nm) of pure water. II. Integrating cavity measurements. Appl. Opt. 1997, 36, 8710–8723. [Google Scholar] [CrossRef]
- Bricaud, A.; Morel, A.; Babin, M.; Allali, K.; Claustre, H. Variations of light absorption by suspended particles with chlorophyllaconcentration in oceanic (case 1) waters: Analysis and implications for bio-optical models. J. Geophys. Res. Ocean. 1998, 103, 31033–31044. [Google Scholar] [CrossRef]
- Ocean OpticsWeb Book. Available online: https://www.oceanopticsbook.info/view/optical-constituents-of-the-ocean/level-2/new-iop-model-case-1-water (accessed on 1 April 2022).
- Nelson, N.B.; Siegel, D.A. The global distribution and dynamics of chromophoric dissolved organic matter. Ann. Rev. Mar. Sci. 2013, 5, 447–476. [Google Scholar] [CrossRef] [Green Version]
- Cox, C.; Munk, W. Statistics of the sea surface derived from Sun glitter. J. Mar. Res. 1954, 13, 198–227. [Google Scholar]
- Cox, C.; Munk, W. Measurement of the Roughness of the Sea Surface from Photographs of the Sun’s Glitter. J. Opt. Soc. Am. 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Hu, Y.; Stamnes, K.; Vaughan, M.; Pelon, J.; Weimer, C.; Wu, D.; Cisewski, M.; Sun, W.; Yang, P.; Lin, B.; et al. Sea surface wind speed estimation from space-based lidar measurements. Atmos. Chem. Phys. Discuss. 2008, 8, 2771–2793. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Voelger, P.; Sugimoto, N. Simulations of the observation of clouds and aerosols with the Experimental Lidar in Space Equipment system. Appl. Opt. 2000, 39, 3120–3137. [Google Scholar] [CrossRef] [PubMed]
- Russell, P.B.; Swissler, T.J.; McCormick, M.P. Methodology for error analysis and simulation of lidar aerosol measurements. Appl. Opt. 1979, 18, 3783–3797. [Google Scholar] [CrossRef] [PubMed]
- Abdallah, H.; Baghdadi, N.; Bailly, J.S.; Pastol, Y.; Fabre, F. Wa-LiD: A New LiDAR Simulator for Waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef] [Green Version]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Martino, A.J.; Neumann, T.A.; Kurtz, N.T.; McLennan, D. ICESat-2 mission overview and early performance. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XXIII, Strasbourg, France, 10 October 2019; p. 11. [Google Scholar] [CrossRef]
- Arnone, R.; Derada, S.; Ladner, S.; Trees, C. Probing the subsurface ocean processes using ocean LIDARS. In Proceedings of the Ocean Sensing and Monitoring IV, Baltimore, MD, USA, 24–26 April 2012; p. 83720O. [Google Scholar] [CrossRef]
- ANSI Z136.1-2007; American National Standard for Safe Use of Lasers. Laser Institute of America: Orlando, FL, USA; American National Standards Institute: New York, NY, USA, 2007.
- Brainerd, K.E.; Gregg, M.C. Surface mixed and mixing layer depths. Deep. Sea Res. Part I Oceanogr. Res. Pap. 1995, 42, 1521–1543. [Google Scholar] [CrossRef]
- De Boyer Montégut, C. Mixed layer depth over the global ocean: An examination of profile data and a profile-based climatology. J. Geophys. Res. 2004, 109. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 532 nm | Refractive index n | 1.33 | |
| Lidar altitude H | 400 km | Dark current Id | |
| Pulse energy E0 | 1.3 J | Transmittance of the receiver optics TO | 0.9 |
| 7.2 ns | Transmittance through the sea surface Ts | 0.95 | |
| PMT excess noise factor F | 1.3 | Aperture of the telescope D | 1.5 m |
| Multiplication factor | 100 | Pulse repetition frequency | 10 Hz |
| FOV of the receiver FOV | 0.15 mrad | 0.1 nm |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 532.27 nm | 0.15 | ||
| Lidar altitude H | 500 km | ||
| Pulse energy E0 | 93.5 μJ | Transmittance of the receiver optics TO | 0.41 |
| 1.25 ns | 38 pm | ||
| Receiver effective area A | 0.41 m | Pulse repetition frequency | 10 kHz |
| Receiver dead time | 3.2 ns | 200 ps | |
| FOV of the receiver FOV | Laser beam divergence |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 532 nm | Refractive index n | 1.33 | |
| Lidar altitude H | 200 m | Dark current Id | |
| Pulse energy E0 | 3 mJ | Transmittance of the receiver optics TO | 0.9 |
| 7 ns | Transmittance through the sea surface Ts | 0.95 | |
| PMT excess noise factor F | 3 | Receiver area A | |
| Detector bandwidth B | 142 MHz | 0.3 A/W | |
| FOV of the receiver FOV | 30 mrad | 1 nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Chen, P.; Mao, Z. SOLS: An Open-Source Spaceborne Oceanic Lidar Simulator. Remote Sens. 2022, 14, 1849. https://doi.org/10.3390/rs14081849
Zhang Z, Chen P, Mao Z. SOLS: An Open-Source Spaceborne Oceanic Lidar Simulator. Remote Sensing. 2022; 14(8):1849. https://doi.org/10.3390/rs14081849
Chicago/Turabian StyleZhang, Zhenhua, Peng Chen, and Zhihua Mao. 2022. "SOLS: An Open-Source Spaceborne Oceanic Lidar Simulator" Remote Sensing 14, no. 8: 1849. https://doi.org/10.3390/rs14081849
APA StyleZhang, Z., Chen, P., & Mao, Z. (2022). SOLS: An Open-Source Spaceborne Oceanic Lidar Simulator. Remote Sensing, 14(8), 1849. https://doi.org/10.3390/rs14081849