
Bagged Tree Model to Retrieve Planetary Boundary Layer Heights by Integrating Lidar Backscatter Profiles and Meteorological Parameters




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Site and Data
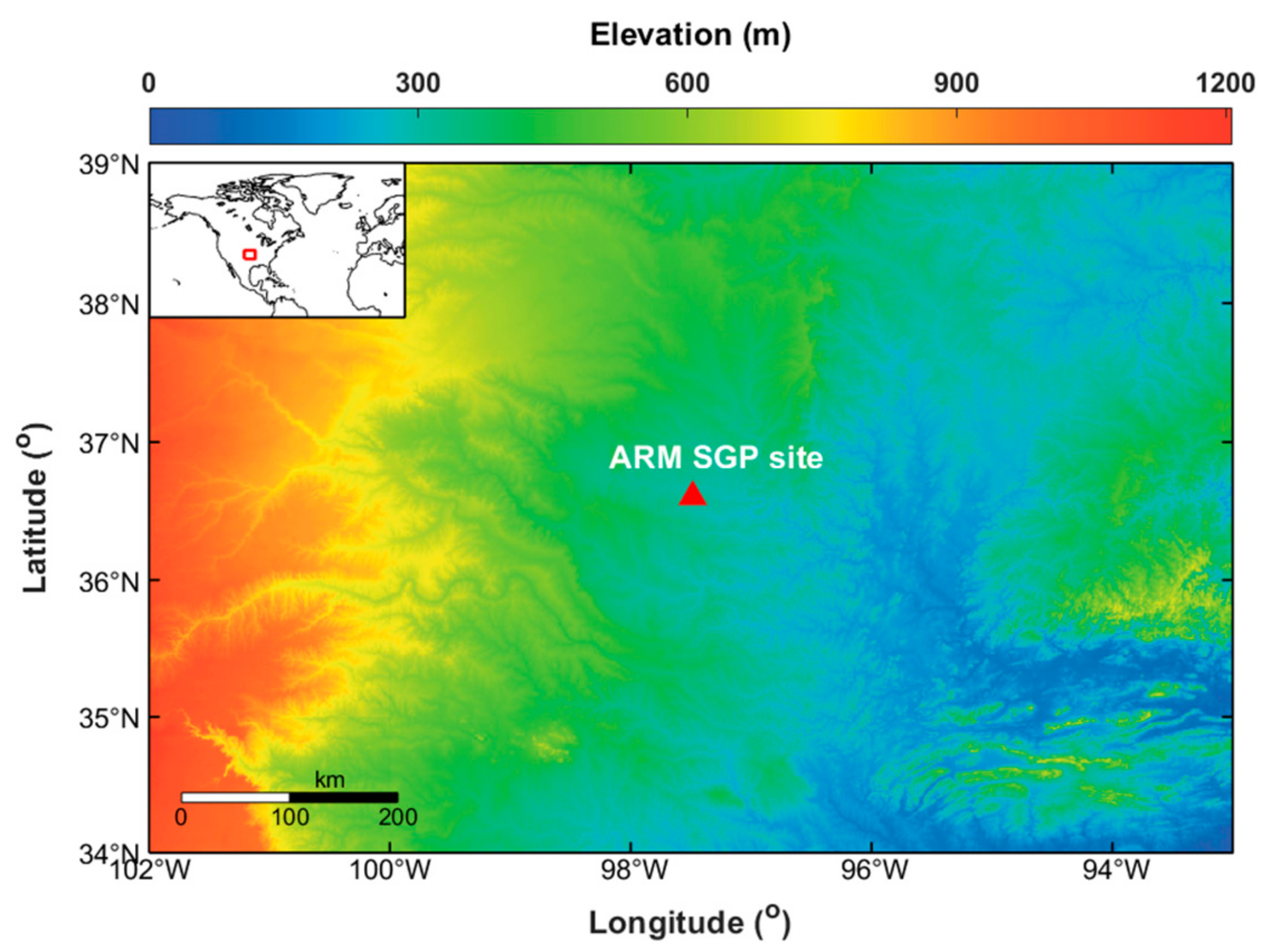
2.1. Site
2.2. Radiosonde
2.3. MPL
2.4. Meteorology Measurements
3. Methods
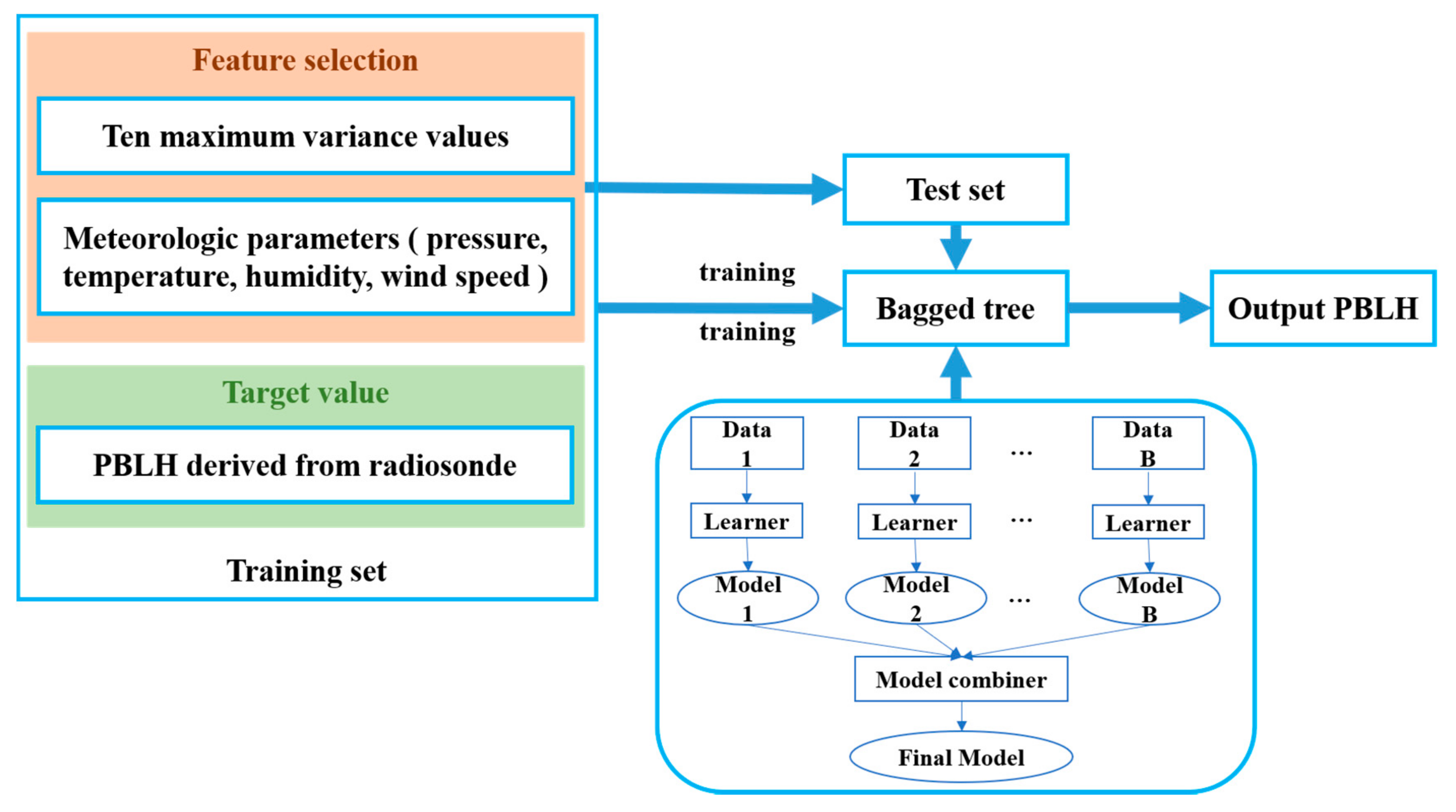
3.1. Bagged Tree (BT)
3.2. Traditional Methods
3.2.1. Maximum Gradient (MG)
3.2.2. Maximum Standard Deviation (MSD)
3.2.3. Wavelet Covariance Transformation (WCT)
3.2.4. Ideal Profile Fit (IPF)
3.3. Evaluation Approaches
4. Results and Discussion
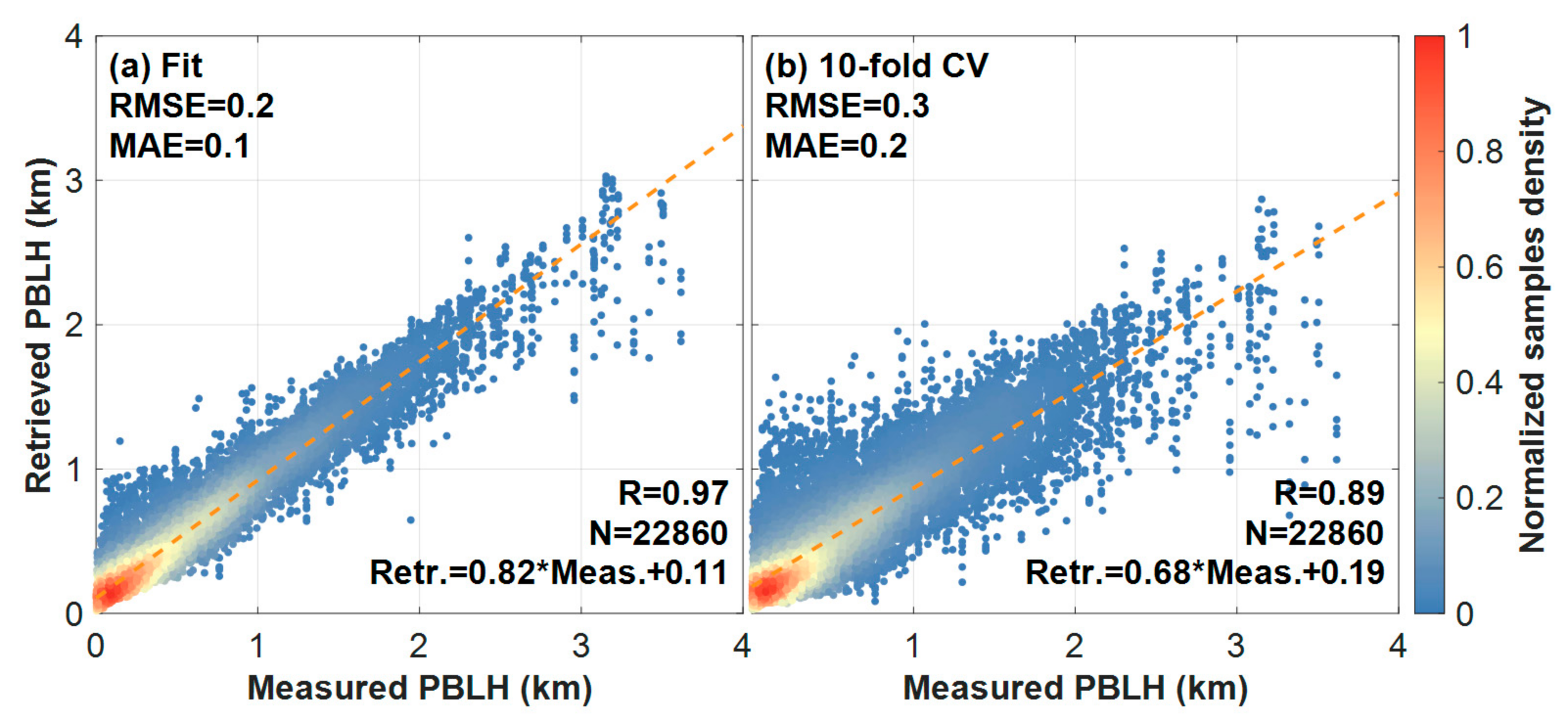
4.1. Model Validation
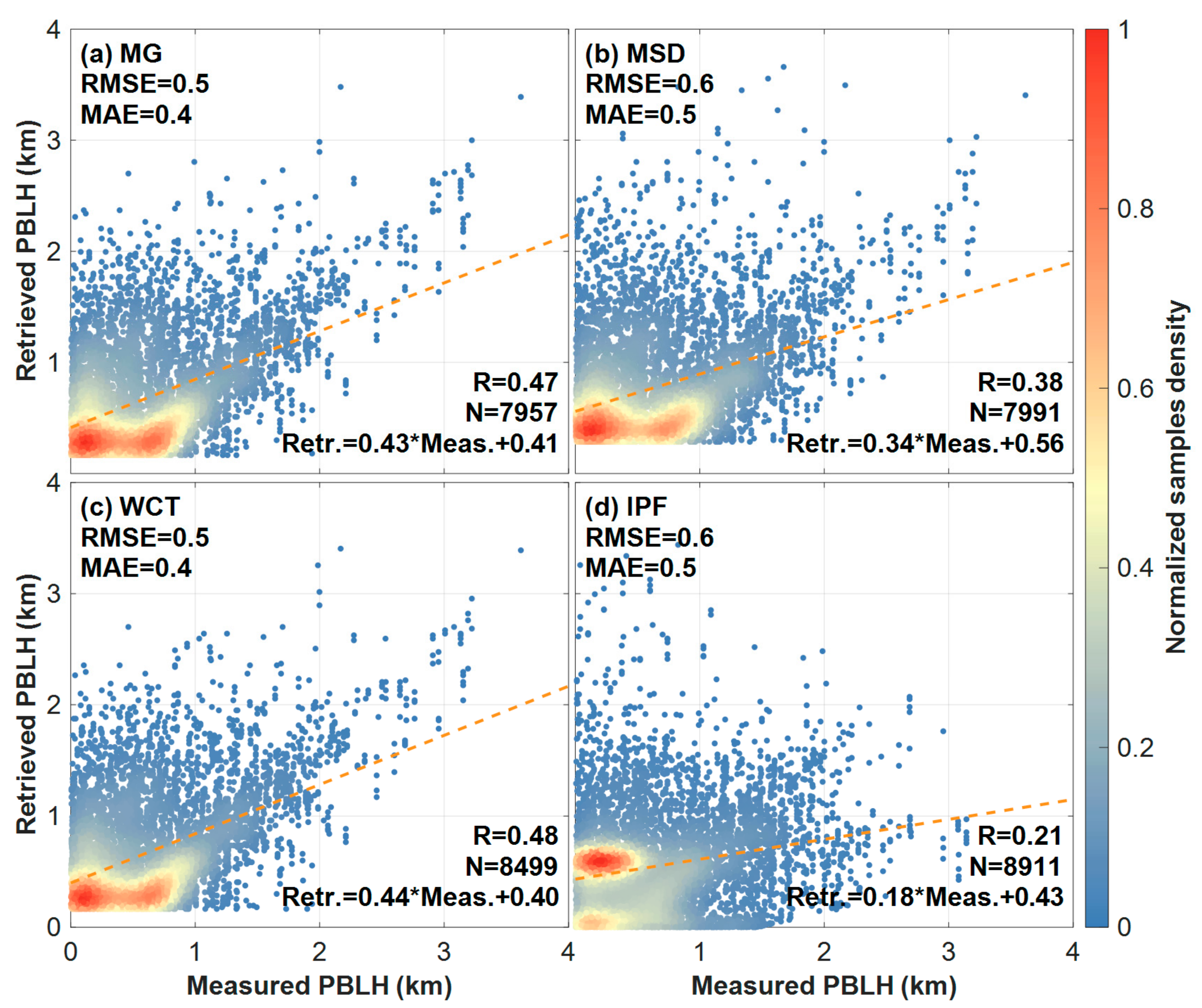
4.2. Comparison with Other Methods
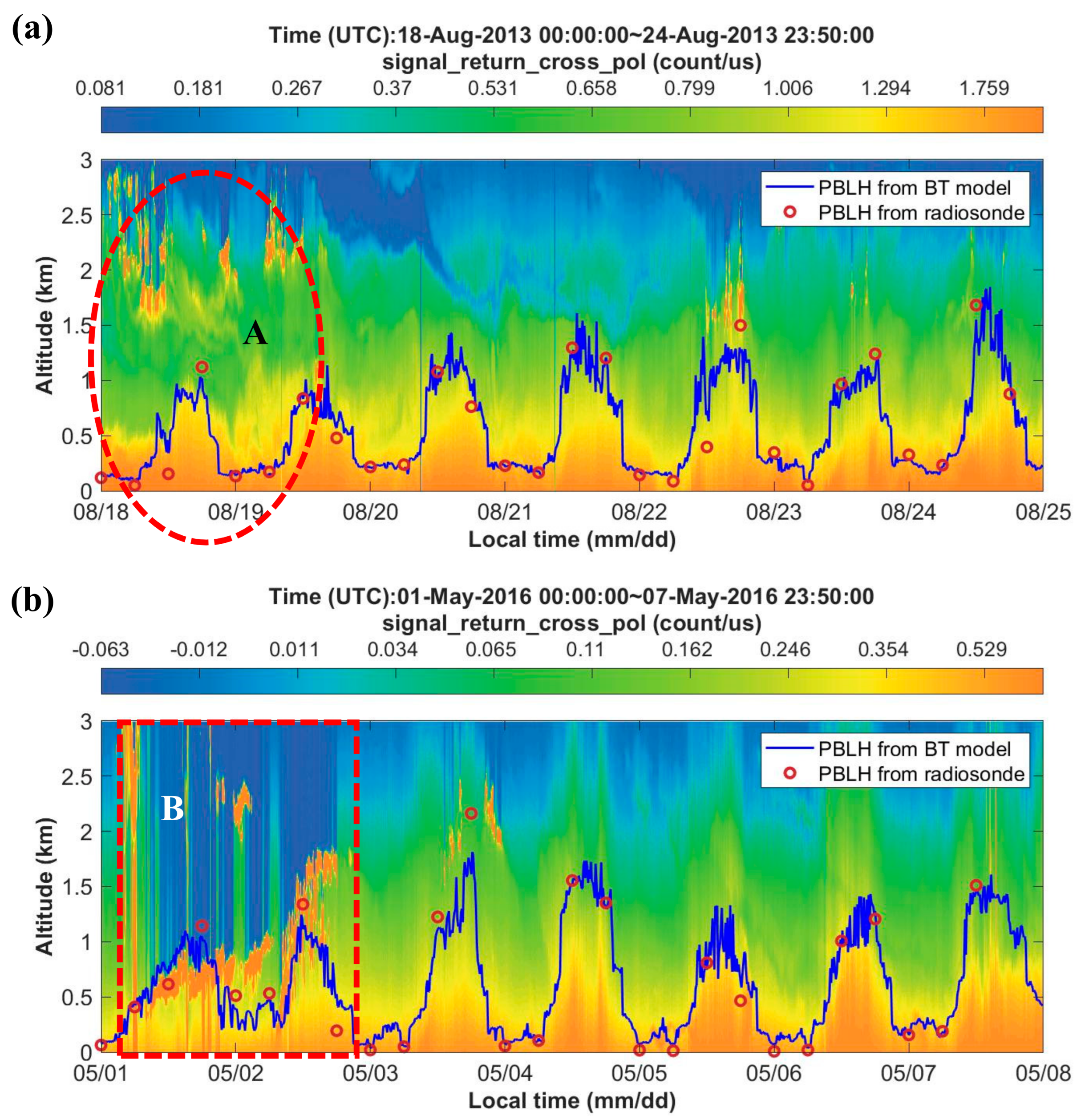
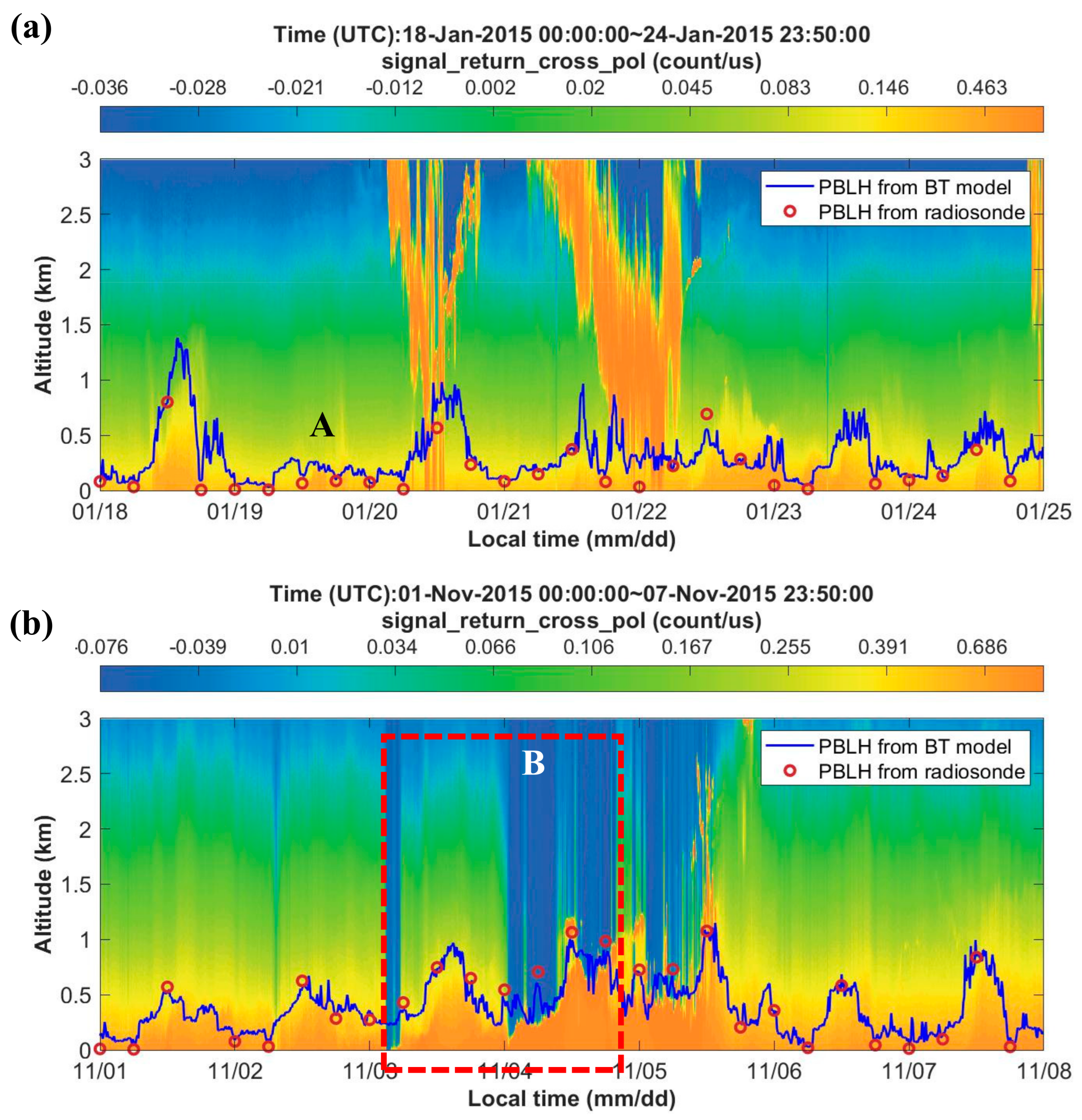
4.3. Case Analysis
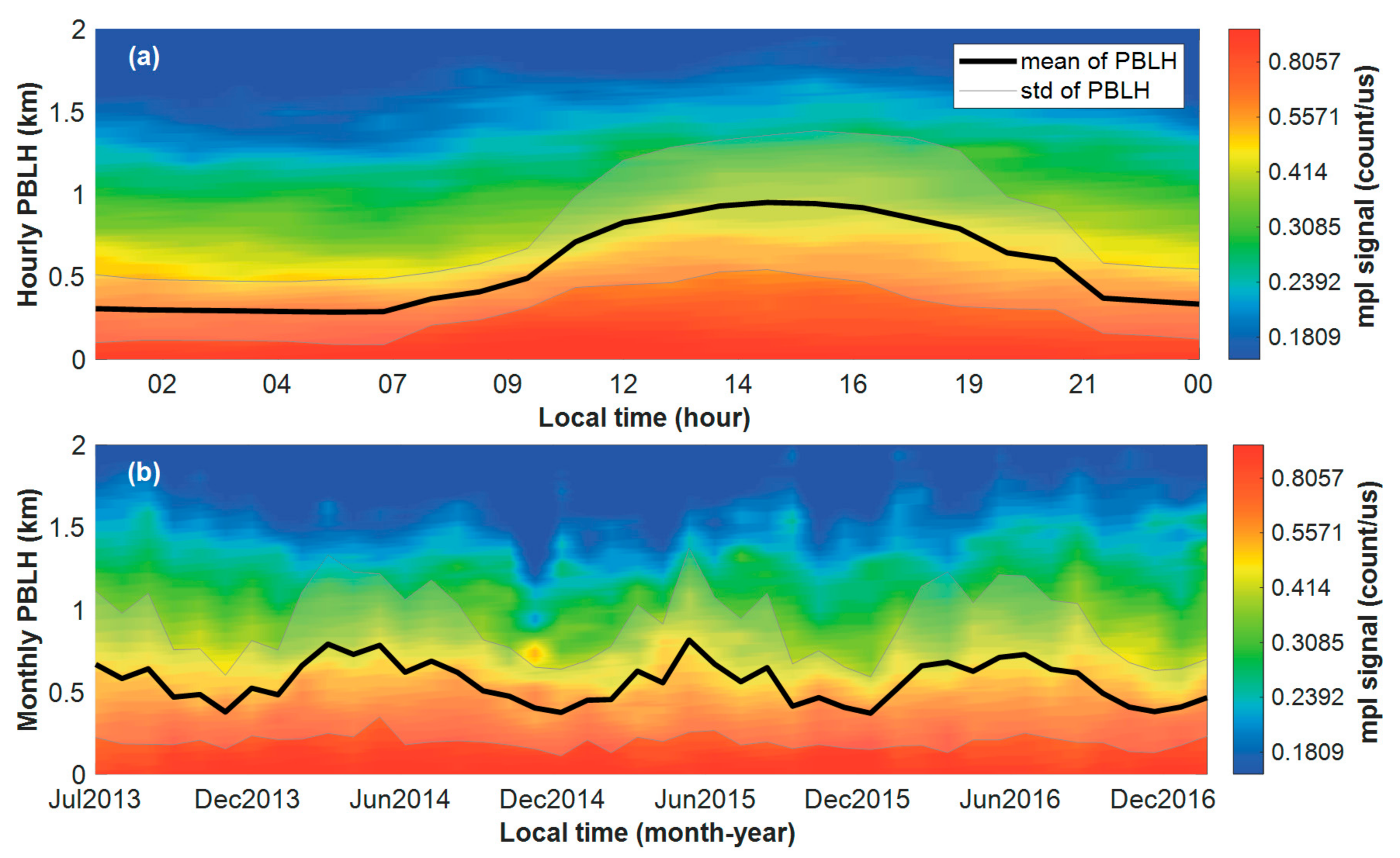
4.4. Long-Term Analysis
4.5. Uncertainty Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer: Dordrecht, The Netherland, 1988; Volume 13. [Google Scholar]
- Seibert, P.; Beyrich, F.; Gryning, S.-E.; Joffre, S.; Rasmussen, A.; Tercier, P. Review and intercomparison of operational methods for the determination of the mixing height. Atmos. Environ. 2000, 34, 1001–1027. [Google Scholar] [CrossRef]
- Wang, W.; He, J.; Miao, Z.; Du, L. Space–Time Linear Mixed-Effects (STLME) model for mapping hourly fine particulate loadings in the Beijing–Tianjin–Hebei region, China. J. Clean. Prod. 2021, 292, 125993. [Google Scholar] [CrossRef]
- Wang, W.; Mao, F.; Gong, W.; Pan, Z.; Du, L. Evaluating the Governing Factors of Variability in Nocturnal Boundary Layer Height Based on Elastic Lidar in Wuhan. Int. J. Environ. Res. Public Health 2016, 13, 1071. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Yang, T.; Wang, Z.; Chen, X.; Wang, H.; Guo, J. A comprehensive evaluation of planetary boundary layer height retrieval techniques using lidar data under different pollution scenarios. Atmos. Res. 2021, 253, 105483. [Google Scholar] [CrossRef]
- Liu, S.; Liang, X.-Z. Observed Diurnal Cycle Climatology of Planetary Boundary Layer Height. J. Clim. 2010, 23, 5790–5809. [Google Scholar] [CrossRef]
- Seidel, D.J.; Ao, C.O.; Li, K. Estimating climatological planetary boundary layer heights from radiosonde observations: Comparison of methods and uncertainty analysis. J. Geophys. Res. Earth Surf. 2010, 115, D16113. [Google Scholar] [CrossRef] [Green Version]
- Shi, T.; Han, G.; Ma, X.; Gong, W.; Chen, W.; Liu, J.; Zhang, X.; Pei, Z.; Gou, H.; Bu, L. Quantifying CO2 uptakes over oceans using LIDAR: A tentative experiment in Bohai bay. Geophys. Res. Lett. 2021, 48, e2020GL091160. [Google Scholar] [CrossRef]
- Guo, J.; Liu, B.; Gong, W.; Shi, L.; Zhang, Y.; Ma, Y.; Zhang, J.; Chen, T.; Bai, K.; Stoffelen, A. First comparison of wind observations from ESA’s satellite mission Aeolus and ground-based radar wind profiler network of China. Atmos. Chem. Phys. 2021, 21, 2945–2958. [Google Scholar] [CrossRef]
- Yang, J.; Yang, S.; Zhang, Y.; Shi, S.; Du, L. Improving characteristic band selection in leaf biochemical property estimation considering interrelations among biochemical parameters based on the PROSPECT-D model. Opt. Express 2021, 29, 400–414. [Google Scholar] [CrossRef]
- Du, L.; Pan, Y.; Wang, W. Random Sample Fitting Method to Determine the Planetary Boundary Layer Height Using Satellite-Based Lidar Backscatter Profiles. Remote Sens. 2020, 12, 4006. [Google Scholar] [CrossRef]
- Liu, B.; Ma, X.; Ma, Y.; Li, H.; Jin, S.; Fan, R.; Gong, W. The relationship between atmospheric boundary layer and temperature inversion layer and their aerosol capture capabilities. Atmos. Res. 2022, 271, 106121. [Google Scholar] [CrossRef]
- Xu, W.; Wang, W.; Wang, N.; Chen, B. A New Algorithm for Himawari-8 Aerosol Optical Depth Retrieval by Integrating Regional PM2.5 Concentrations. IEEE Trans. Geosci. Remote Sens. 2022, 1. [Google Scholar] [CrossRef]
- Steyn, D.G.; Baldi, M.; Hoff, R.M. The Detection of Mixed Layer Depth and Entrainment Zone Thickness from Lidar Backscatter Profiles. J. Atmos. Ocean. Technol. 1999, 16, 953–959. [Google Scholar] [CrossRef]
- Menut, L.; Flamant, C.; Pelon, J.; Flamant, P.H. Urban boundary-layer height determination from lidar measurements over the paris area. Appl. Opt. 1999, 38, 945–954. [Google Scholar] [CrossRef] [PubMed]
- Yin, J.; Gao, C.Y.; Hong, J.; Gao, Z.; Li, Y.; Li, X.; Fan, S.; Zhu, B. Surface Meteorological Conditions and Boundary Layer Height Variations During an Air Pollution Episode in Nanjing, China. J. Geophys. Res. Atmos. 2019, 124, 3350–3364. [Google Scholar] [CrossRef]
- Brooks, I.M. Finding Boundary Layer Top: Application of a Wavelet Covariance Transform to Lidar Backscatter Profiles. J. Atmos. Ocean. Technol. 2003, 20, 1092–1105. [Google Scholar] [CrossRef] [Green Version]
- Baars, H.; Ansmann, A.; Engelmann, R.; Althausen, D. Continuous monitoring of the boundary-layer top with lidar. Atmos. Chem. Phys. 2008, 8, 7281–7296. [Google Scholar] [CrossRef] [Green Version]
- Su, T.; Li, Z.; Kahn, R. A new method to retrieve the diurnal variability of planetary boundary layer height from lidar under different thermodynamic stability conditions. Remote Sens. Environ. 2020, 237, 111519. [Google Scholar] [CrossRef]
- Kumar, N.; Soni, K.; Agarwal, R. A comprehensive study of different feature selection methods and machine-learning techniques for SODAR structure classification. Modeling Earth Syst. Environ. 2021, 7, 209–220. [Google Scholar] [CrossRef]
- Rieutord, T.; Aubert, S.; Machado, T. Deriving boundary layer height from aerosol lidar using machine learning: KABL and ADABL algorithms. Atmos. Meas. Tech. 2021, 14, 4335–4353. [Google Scholar] [CrossRef]
- Ye, J.; Liu, L.; Wang, Q.; Hu, S.; Li, S. A Novel Machine Learning Algorithm for Planetary Boundary Layer Height Estimation Using AERI Measurement Data. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- de Arruda Moreira, G.; Sánchez-Hernández, G.; Guerrero-Rascado, J.L.; Cazorla, A.; Alados-Arboledas, L. Estimating the urban atmospheric boundary layer height from remote sensing applying machine learning techniques. Atmos. Res. 2022, 266, 105962. [Google Scholar] [CrossRef]
- Liu, Z.; Chang, J.; Li, H.; Chen, S.; Dai, T. Estimating Boundary Layer Height from LiDAR Data under Complex Atmospheric Conditions Using Machine Learning. Remote Sens. 2022, 14, 418. [Google Scholar] [CrossRef]
- Muradyan, P.; Coulter, R. Micropulse Lidar (MPL) Handbook; PNNL: Richland, WA, USA, 2020. [Google Scholar]
- Ritsche, M. ARM Surface Meteorology Systems Instrument Handbook; PNNL: Richland, WA, USA, 2011. [Google Scholar]
- Sivaraman, C.; McFarlane1, S.; Chapman, E.; Sivaraman, C.; McFarlane1, S.; Chapman, E.; Liu, S.; Fischer, M. Planetary Boundary Layer (PBL) Height Value Added Product (VAP): Radiosonde Retrievals; US Department of Energy: Washington, DC, USA, 2013. [Google Scholar]
- Holdridge, D.; Ritsche, M.; Prell, J.; Coulter, R. Balloon-Borne Sounding System (SONDE) Handbook; US Department of Energy: Washington, DC, USA, 2011. [Google Scholar]
- Holdridge, D. Balloon-Borne Sounding System (SONDE) Instrument Handbook; Atmospheric Radiation Measurement User Facility, Pacific Northwest National Laboratory: Richland, WA, USA, 2020. [Google Scholar]
- Pan, W. Shrinking classification trees for bootstrap aggregation. Pattern Recognit. Lett. 1999, 20, 961–965. [Google Scholar] [CrossRef]
- Ma, L.; Sun, B.; Li, Z. Bagging Likelihood-Based Belief Decision Trees. In Proceedings of the 2017 20th International Conference on Information Fusion (FUSION), Xi’an, China, 10–13 July 2017. [Google Scholar]
- Su, T.; Li, J.; Li, C.; Xiang, P.; Lau, A.K.-H.; Guo, J.; Yang, D.; Miao, Y. An intercomparison of long-term planetary boundary layer heights retrieved from CALIPSO, ground-based lidar, and radiosonde measurements over Hong Kong. J. Geophys. Res. Atmos. 2017, 122, 3929–3943. [Google Scholar] [CrossRef]
- Compton, J.C.; Delgado, R.; Berkoff, T.A.; Hoff, R.M. Determination of Planetary Boundary Layer Height on Short Spatial and Temporal Scales: A Demonstration of the Covariance Wavelet Transform in Ground-Based Wind Profiler and Lidar Measurements. J. Atmos. Ocean. Technol. 2013, 30, 1566–1575. [Google Scholar] [CrossRef]
- Liu, B.; Ma, Y.; Guo, J.; Gong, W.; Zhang, Y.; Mao, F.; Li, J.; Guo, X.; Shi, Y. Boundary Layer Heights as Derived From Ground-Based Radar Wind Profiler in Beijing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8095–8104. [Google Scholar] [CrossRef]
- Li, J.; Han, Y.; Liu, W.; Wang, S.; Cao, L.; Lu, Z. A new theoretical model deriving planetary boundary layer height in desert regions and its application on dust devil emissions. Sci. Total Environ. 2021, 152378. [Google Scholar] [CrossRef]
- Vivone, G.; D’Amico, G.; Summa, D.; Lolli, S.; Amodeo, A.; Bortoli, D.; Pappalardo, G. Atmospheric boundary layer height estimation from aerosol lidar: A new approach based on morphological image processing techniques. Atmos. Chem. Phys. 2021, 21, 4249–4265. [Google Scholar] [CrossRef]
- Pan, Y.n.; Jin, Z.; Tong, P.; Xu, W.; Wang, W. Edge Detection Method for Determining Boundary Layer Height Based on Doppler Lidar. Atmosphere 2021, 12, 1103. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, W.; Pan, Y.; Feng, H.; Chen, B. Bagged Tree Model to Retrieve Planetary Boundary Layer Heights by Integrating Lidar Backscatter Profiles and Meteorological Parameters. Remote Sens. 2022, 14, 1597. https://doi.org/10.3390/rs14071597
Wei W, Pan Y, Feng H, Chen B. Bagged Tree Model to Retrieve Planetary Boundary Layer Heights by Integrating Lidar Backscatter Profiles and Meteorological Parameters. Remote Sensing. 2022; 14(7):1597. https://doi.org/10.3390/rs14071597
Chicago/Turabian StyleWei, Wang, Ya’ni Pan, Huihui Feng, and Biyan Chen. 2022. "Bagged Tree Model to Retrieve Planetary Boundary Layer Heights by Integrating Lidar Backscatter Profiles and Meteorological Parameters" Remote Sensing 14, no. 7: 1597. https://doi.org/10.3390/rs14071597
APA StyleWei, W., Pan, Y., Feng, H., & Chen, B. (2022). Bagged Tree Model to Retrieve Planetary Boundary Layer Heights by Integrating Lidar Backscatter Profiles and Meteorological Parameters. Remote Sensing, 14(7), 1597. https://doi.org/10.3390/rs14071597