
Coordination of Complementary Sets for Low Doppler-Induced Sidelobes

 ,
,  ,
,
Abstract
:1. Introductions
- (1)
- With complementary sets, a longer accumulation of transmission pulses may be required to achieve complementarity (especially when the sequence number of complementary sets is very large), thus requiring longer illumination times for the same Delay-Doppler resolution;
- (2)
- As with Golay complementary waveforms, the waveforms of complementary sets generate Doppler-induced sidelobes along the nonzero Doppler axes, but since the waveform variation range of complementary sets is much wider, it is possible to reduce the Doppler-induced sidelobes by carefully designing the waveform of complimentary sets without sacrificing too much Doppler resolution.
2. A Brief Review of Complementary Sets
3. Proposed Design for Complementary Sets
3.1. Binominal Design Algorithm
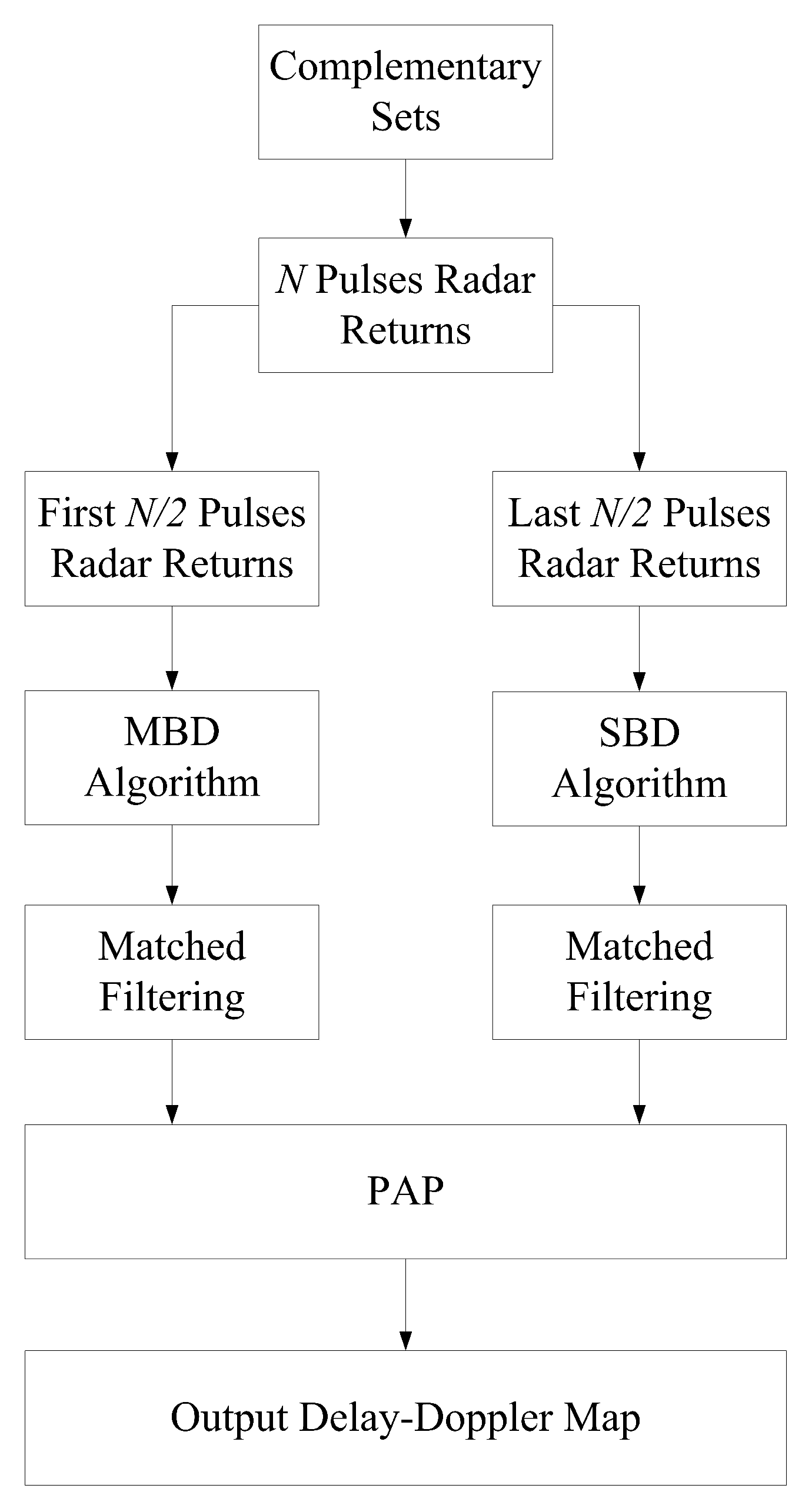
3.2. Generalized Binominal Design Procedure
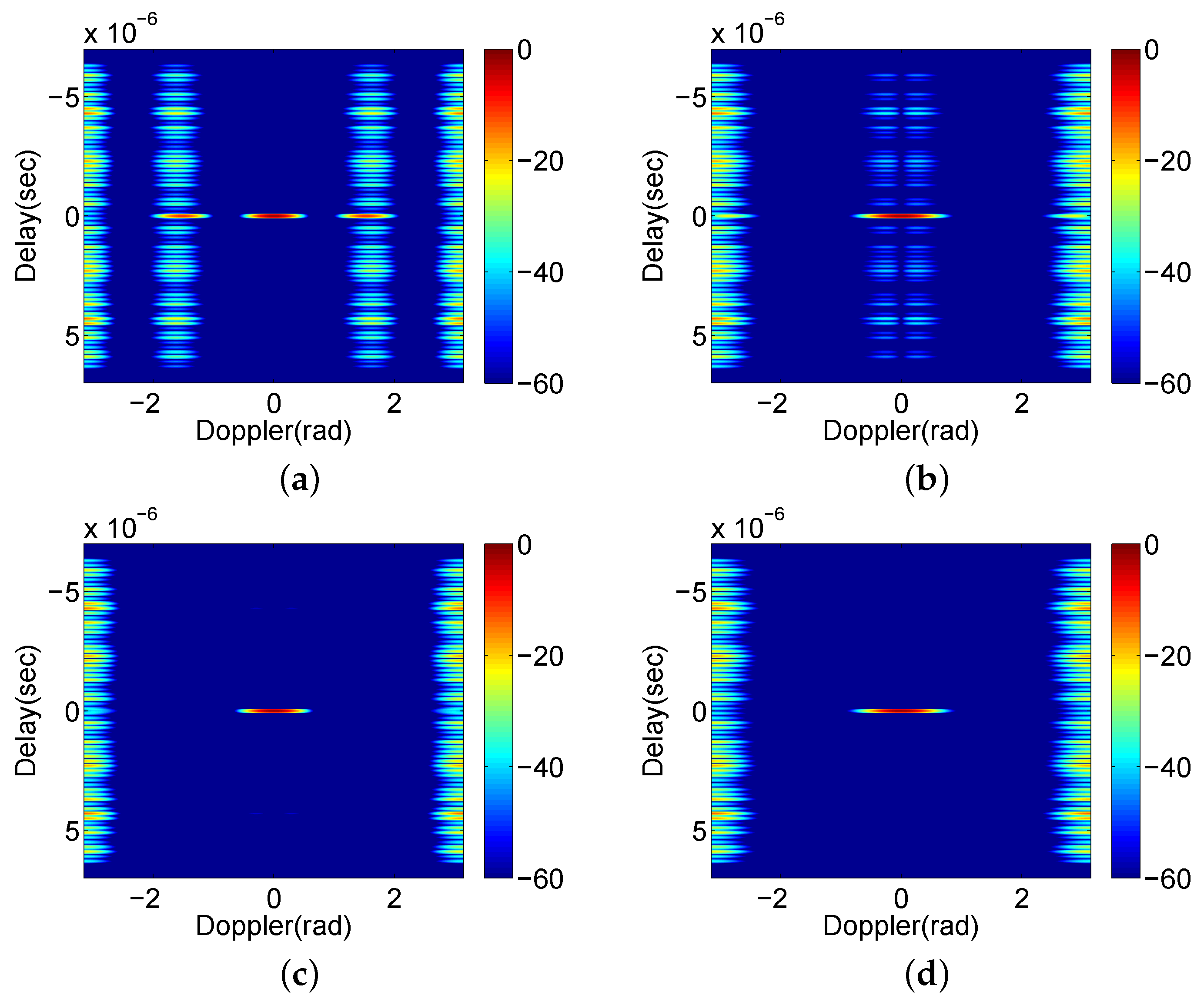
- Middle Blanked Design (MBD) algorithm: Indicated by its name, the algorithm designs the weights to suppress the Doppler-induced sidelobes near the center Doppler shift of the ambiguity function. As a result, sidelobes around zero-Doppler are suppressed by the MBD algorithm, but significant sidelobes are still present in the area corresponding to large Doppler shifts (roughly rad to 2 rad of absolute values, see in the results shown in Section 4.1). In this algorithm, the P sequence is the standard transmission order of complementary sets, i.e., , and the Q sequence is designed as , where rounds the results to the nearest integer no more than , and returns the modulus of .
- 2.
- Side Blanked Design (SBD) algorithm: This approach generates weights so that the sidelobe blanked area mainly corresponds to large Dopplers (between rad to rad of absolute values), as seen in the simulation of Section 4.1. The pulse trains for this algorithm are: , and .
- (i)
- The signal energy from the target is preserved during the process, whilst that for sidelobes is randomly distributed and thus flatter over the Delay-Doppler map than the outputs of either MBD or SBD algorithm (e.g., if the magnitude of target in the Delay-Doppler map of MBD and SBD algorithm are both , while the sidelobe at a certain point are and respectively, then the PAP output remains magnitude of target at , and normalizes the sidelobe to ), with an overall level less than in the Doppler interval of interest ( refer to the results in Section 4.1);
- (ii)
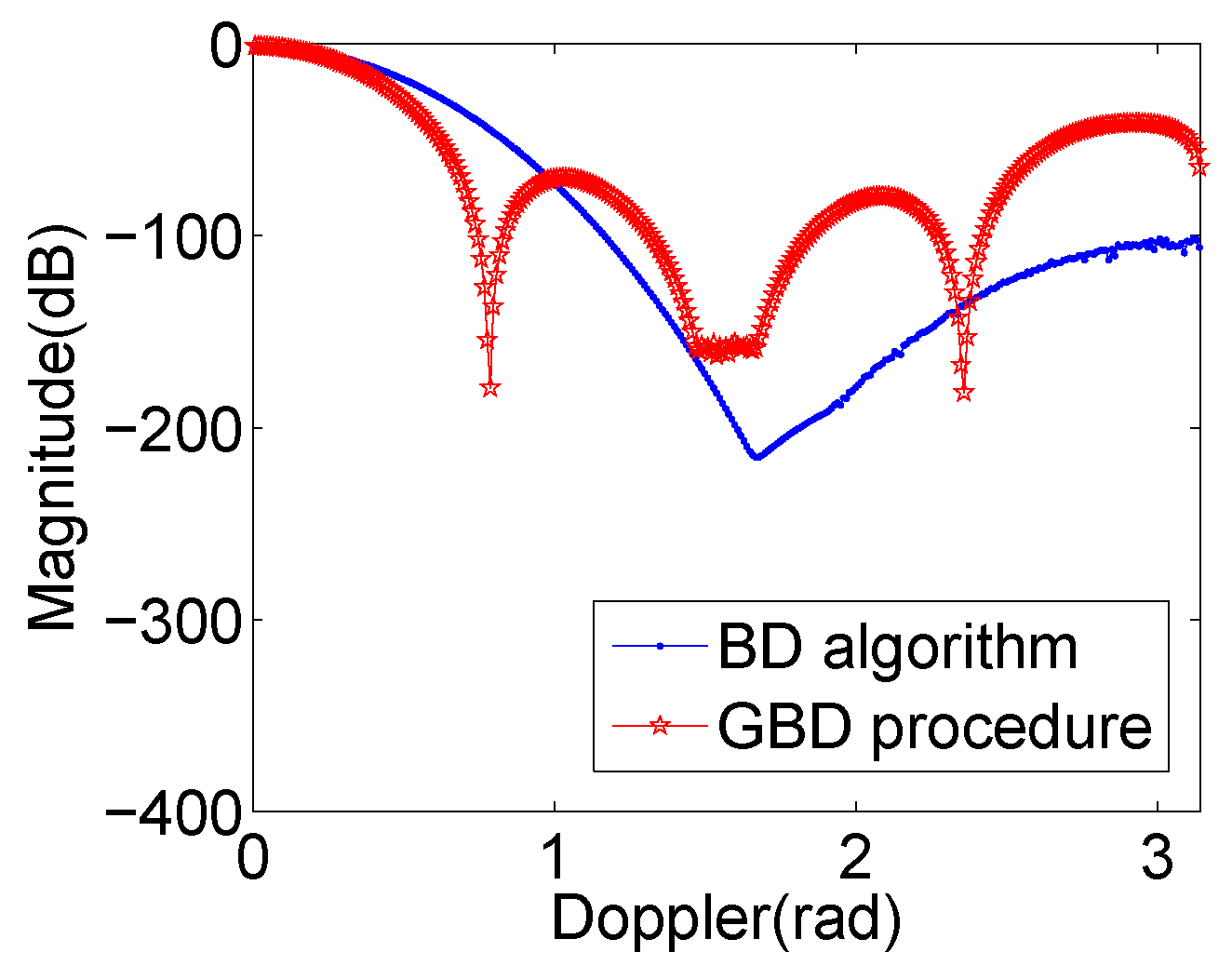
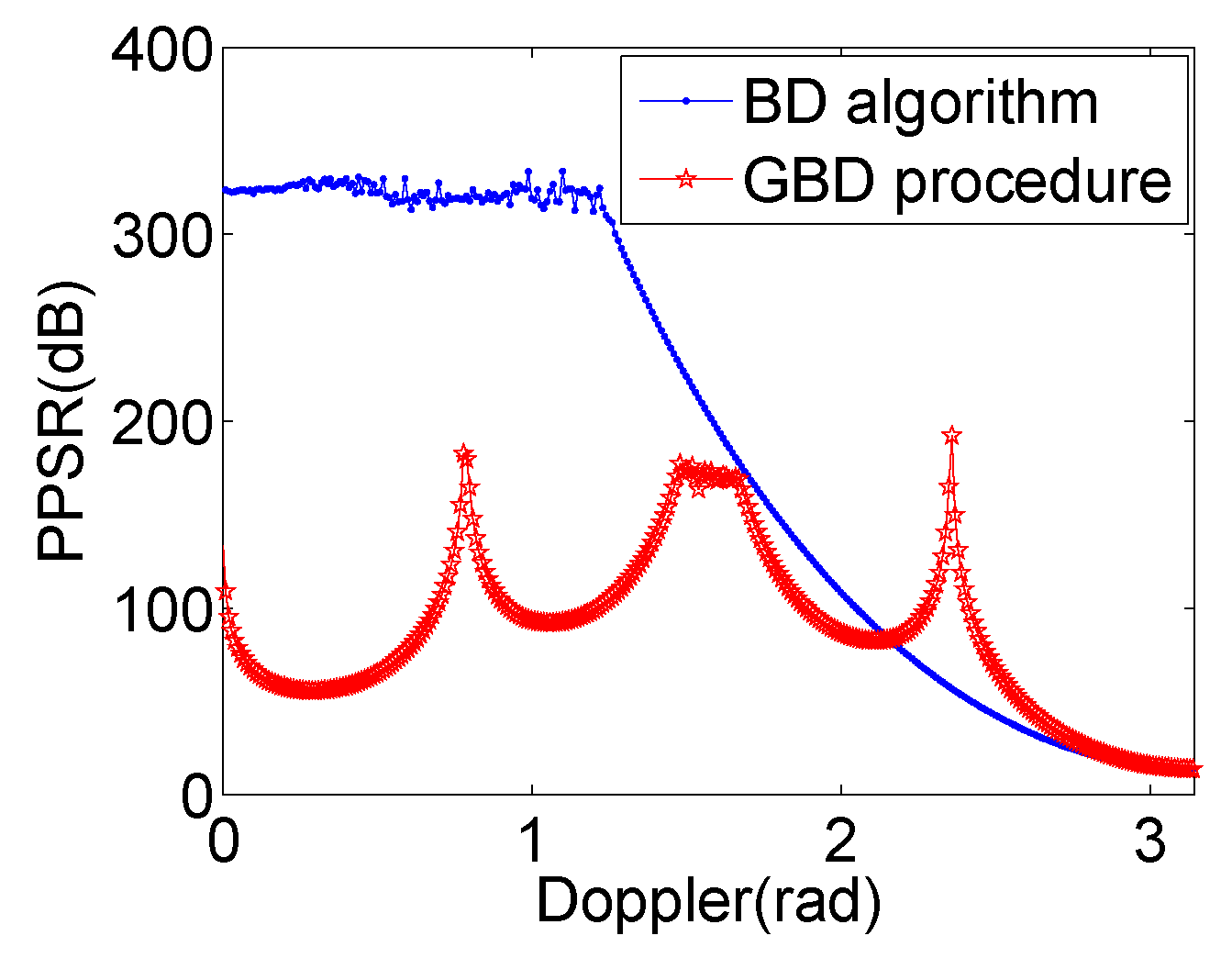
- A comparable sidelobe blanking area as well as a better Doppler resolution are obtained compared with the BD algorithm. Nevertheless, the better performance comes at the cost of the increase of complexity of practical radar system since complex waveforms and weighting schemes are used, and an acceptable decrease of PPSR.
3.3. Performance of the BD Algorithm & the GBD Procedure
4. Numerical Simulations and Discussions
4.1. Ambiguity Functions Analysis
4.2. PPSR Comparisons
4.3. Comparing to Conventional Waveform
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Further Performance Discussions of the Procedure to the Generation Pattern of Complementary Sets

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particular Complementary Sets | Autocorrelation Sequences | |||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 4 | 1 | 0 | 0 | |||
| 1 | 0 | 4 | 0 | 1 | 0 | |||
| 1 | 0 | 4 | 0 | 1 | 0 | |||
| 0 | 1 | 4 | 1 | 0 | 0 | |||
| Particular Complementary Sets | |
|---|---|
| 8 | |
| 8 | |
| General Complementary Sets | Autocorrelation Sequences | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 3 | 2 | 1 | 12 | |
| 1 | 4 | 1 | 2 | |||||
| 2 | 4 | 2 | ||||||
| 1 | 4 | 1 | ||||||
| General Complementary Sets | |
|---|---|
| 8 | |
| 8 | |

References
- Golay, M. Complementary series. IRE Trans. Inform. Theory 1961, 7, 82–87. [Google Scholar] [CrossRef]
- Calderbank, R.; Howard, S.D.; Moran, B. Waveform diversity in radar signal processing. IEEE Signal Process. Mag. 2009, 26, 32–41. [Google Scholar] [CrossRef]
- Pezeshki, A.; Calderbank, A.R.; Moran, W.; Howard, S.D. Doppler resilient Golay complementary waveforms. IEEE Trans. Inform. Theory 2008, 54, 4254–4266. [Google Scholar] [CrossRef] [Green Version]
- Dang, W.; Pezeshki, A.; Howard, S.; Moran, W.; Calderbank, R. Coordinating complementary waveforms for sidelobe suppression. In Proceedings of the 45th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 6–9 November 2011; pp. 2096–2100. [Google Scholar] [CrossRef] [Green Version]
- Tseng, C.C.; Liu, C. Complementary sets of sequences. IEEE Trans. Inform. Theory 1972, 18, 644–652. [Google Scholar] [CrossRef]
- Farnane, K.; Minaoui, K. Analysis of the radar ambiguity function for a new Golay sets shaping. In Proceedings of the 2020 10th International Symposium on Signal, Image, Video and Communications (ISIVC), Tokyo, Japan, 7–9 April 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Aparicio, J.; Shimura, T. Asynchronous detection and identification of multiple users by multi-carrier modulated complementary set of sequences. IEEE Access 2018, 6, 22054–22069. [Google Scholar] [CrossRef]
- Koshevyy, V.; Popova, V. Complementary coded waveforms sets in marine radar application. In Proceedings of the 2017 IEEE First Ukraine Conference on Electrical and Computer Engineering (UKRCON), Kyiv, Ukraine, 29 May–2 June 2017; pp. 215–220. [Google Scholar] [CrossRef] [Green Version]
- Searle, S.; Howard, S.; Moran, B. The use of complementary sets in MIMO radar. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Grove, CA, USA, 26–29 October 2008; pp. 510–514. [Google Scholar] [CrossRef]
- Searle, S.; Howard, S. Waveform design and processing for multichannel MIMO radar. In Proceedings of the 2009 International Radar Conference “Surveillance for a Safer World”, Bordeaux, France, 12–16 October 2009; pp. 1–6. [Google Scholar]
- Tang, J.; Zhang, N.; Ma, Z.; Tang, B. Construction of Doppler resilient complete complementary code in MIMO radar. IEEE Trans. Signal Process. 2014, 62, 4704–4712. [Google Scholar] [CrossRef]
- Nguyen, H.D.; Coxson, G.E. Doppler tolerance, complementary code sets, and generalised Thue-Morse sequences. IET Radar Sonar Navig. 2016, 10, 1603–1610. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, X.; Huang, X. Range sidelobe suppression for using Golay complementary waveforms in multiple moving target detection. Signal Process. 2017, 141, 28–31. [Google Scholar] [CrossRef]
- Zhu, J.; Chu, N.; Song, Y.; Yi, S.; Wang, X.; Huang, X.; Moran, B. Alternative signal processing of complementary waveform returns for range sidelobe suppression. Signal Process. 2019, 159, 187192. [Google Scholar] [CrossRef]
- Wu, Z.J.; Zhou, Z.Q.; Wang, C.X.; Li, Y.C.; Zhao, Z.F. Doppler resilient complementary waveform design for active sensing. IEEE Sens. J. 2020, 20, 9963–9976. [Google Scholar] [CrossRef]
- Dang, W. Signal Design for Active Sensing. Ph.D. Thesis, Colorado State University, Fort Collins, CO, USA, 2014. [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing; McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Zhu, J.; Wang, X.; Song, Y.; Huang, X.; Moran, B. Range sidelobe suppression using complementary sets in distributed multistatic radar networks. Sensors 2018, 18, 35. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Skolnik, M. Introduction to Radar Systems, 3rd ed.; McGraw-Hill Education: New York, NY, USA, 2001. [Google Scholar]
- Ojha, A.K.; Koch, D.B. Impact of noise and target fluctuation on the performance of binary phase coded radar signals. Proc. IEEE Southeastcon 1992, 1, 215–218. [Google Scholar] [CrossRef]
- Davis, J.; Jedwab, J. Peak-to-mean power control in OFDM, Golay complementary sequences, and Reed-Muller codes. IEEE Trans. Inf. Theory 1999, 45, 2397–2417. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Guan, Y.L.; Parampalli, U. New complete complementary codes for peak-to-mean power control in multi-Carrier CDMA. IEEE Trans. Commun. 2014, 62, 1105–1113. [Google Scholar] [CrossRef]
- Das, S.; Budišin, S.; Majhi, S.; Liu, Z.; Guan, Y.L. A multiplier-free Generator for polyphase complete complementary codes. IEEE Trans. Signal Process. 2018, 66, 1184–1196. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Fan, C.; Song, Y.; Huang, X.; Zhang, B.; Ma, Y. Coordination of Complementary Sets for Low Doppler-Induced Sidelobes. Remote Sens. 2022, 14, 1549. https://doi.org/10.3390/rs14071549
Zhu J, Fan C, Song Y, Huang X, Zhang B, Ma Y. Coordination of Complementary Sets for Low Doppler-Induced Sidelobes. Remote Sensing. 2022; 14(7):1549. https://doi.org/10.3390/rs14071549
Chicago/Turabian StyleZhu, Jiahua, Chongyi Fan, Yongping Song, Xiaotao Huang, Bingbing Zhang, and Yanxin Ma. 2022. "Coordination of Complementary Sets for Low Doppler-Induced Sidelobes" Remote Sensing 14, no. 7: 1549. https://doi.org/10.3390/rs14071549
APA StyleZhu, J., Fan, C., Song, Y., Huang, X., Zhang, B., & Ma, Y. (2022). Coordination of Complementary Sets for Low Doppler-Induced Sidelobes. Remote Sensing, 14(7), 1549. https://doi.org/10.3390/rs14071549