1. Introduction
Snow is among the most important variables in the Earth’s climate. There are, in fact, several important effects of falling snow (snowfall) and snow at the surface on the climate system, as well as on the water cycle and the energy budget. The high albedo of snow is a primary factor controlling the amount of solar radiation absorbed by the Earth, affecting the surface energy balance as well as land–atmosphere interactions, and considerably influencing the atmospheric circulation. It should also be noted that snow has a primary role in the regional water cycle as the snow accumulated during the winter stores a large amount of freshwater, while the melting snow provides water resources for the ecosystem. Global monitoring of snowfall and snow cover is therefore of great relevance for climate change studies, for sustainable management of water and food resources, for understanding feedback mechanisms between hydrology and climate, and for forecasting hazardous weather and natural disasters such as floods and avalanches [
1,
2,
3,
4].
It is important to take into account the fact that snowfall is the most frequent type of precipitation in middle and high latitudes [
5,
6,
7]; above 60–70 degrees it dominates over liquid precipitation [
8]. At these high latitudes it is difficult to obtain reliable surface-based snowfall measurements due to the lack of dense networks of ground-based snow gauges and/or radars [
9], and also due to the complex topography and extreme climatic conditions. Moreover, gauge-based measurements of snowfall, which are particularly challenging, can be largely unreliable as they are prone to wind-induced under-catchment errors [
4,
10,
11].
These problems have highlighted the need to rely on satellite-based observations, which currently represent the most promising method of obtaining long-term global snowfall and snow-cover measurements. Spaceborne microwave sensors have been found to be particularly suitable for these purposes, unlike visible or infrared sensors which are used to analyze only the cloud-top features [
12,
13].
Thanks to the ability of microwaves (MWs) to penetrate clouds, passive MW radiometers have been widely used for snowfall detection [
12,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23]. In general, high-frequency channels (above 80 GHz) are more sensitive to scattering from ice hydrometeors, while lower-frequency channels (10–37 GHz) are more sensitive to surface emissivity [
23,
24,
25,
26]. Around this broad classification, several sensitivity studies have highlighted the potential of various high-frequency radiometer channels. For example, Bennartz and Bauer [
27] investigated channels at 85, 150, and 183 GHz and highlighted the contribution of frequencies around 150 GHz to snowfall detection in middle and high latitudes. They also noted that channels near 85 and 183 GHz show potential for snow detection. Di Michele and Bauer [
28] found that high-frequency bands (95–100, 140–150, 187 GHz) are the most suitable for the retrieval of snowfall over land and oceans. Skofronick-Jackson et al. [
17] analyzed the contribution of the 166 GHz channel in detecting falling snow over land. You et al. [
23] and Ebtehaj and Kummerow [
22] highlighted the contribution of the combination of low- (10–19 GHz) and high-frequency (89–166 GHz) channels in snowfall detection. Edel et al. [
29] analyzed the impact of measurements at 190.3 GHz and 183.3 ± 3 GHz for snowfall detection in the Arctic region.
In addition, dual polarization channels at high frequency, available from spaceborne conical scanning radiometers, have shown great potential for snowfall detection. Panegrossi et al. [
30] studied in detail the sensitivity of the Global Precipitation Measurement (GPM) Microwave Imager (GMI) 166 GHz polarization difference for snowfall detection, showing that the polarization difference responds to moderate and heavy snowfall events. Kongoli et al. [
31] examined the sensitivity of the 89 GHz and 166 GHz polarization differences to the snowfall intensity and evaluated their use for snowfall detection.
A fundamental contribution to the global estimate of snowfall is made by spaceborne active microwave sensors such as the Cloud Profiling Radar (CPR) on board CloudSat and the Dual-Frequency Precipitation Radar (DPR) on board the Global Precipitation Measurement-Core Observatory (GPM-CO). CPR (a 94 GHz nadir-looking radar) has proved highly effective in detecting snowfall with high sensitivity (~ –28 to –30 dBZ) and good orbital characteristics (sampling from 82°N–82°S latitudes) and has been widely used in snowfall research [
3,
5,
32,
33,
34,
35]. DPR (Ku 13.6 GHz and Ka 35.5 GHz) is also used in snow detection, although with different performances compared to CPR [
2,
36,
37].
Despite the importance of falling snow and the considerable attention given by researchers to satellite snowfall retrieval, this is still one of the most challenging tasks. Compared to rainfall, snowfall retrieval from space is more challenging for several reasons related to the complex and dynamic interactions between the snowfall scattering signal and the surface. The non-spherical nature of ice particles and snowflakes, compared to roughly spherical raindrops, results in much more complex radiative properties [
3,
23]. Compared to rainfall, graupel, or hail, the snowfall scattering signal (and related depression of brightness temperatures -BTs) is much weaker, and therefore is more easily obscured by other contributions to the upwelling radiation (e.g., background surface or supercooled liquid water emission). Changes in the surface emissivity due to snow accumulation on the ground, snow wetness, and metamorphism, (altering the snow grain microstructure) can significantly impact the passive microwave signal and its relation to snowfall [
3,
23,
38]. Moreover, several studies have shown that the snowfall scattering signal tends to be masked by the atmospheric water vapor and cloud liquid water emission in precipitating conditions [
21,
39,
40]. In the study conducted by Panegrossi et al. [
30], the impact of the presence of supercooled liquid water on the ability of GMI to observe snowfall at higher latitudes was analyzed in detail. The study showed how the influence of supercooled droplets on the high-frequency channels’ BTs is significant, especially when found on the top of ice cloud layers, and how their presence also affects the BTs’ polarization differences.
A field that is currently attracting the attention of researchers is the application of machine learning (ML) techniques to Earth observation. These machine learning techniques are widely applied in Earth observation because of their ability to approximate, to an arbitrary degree of accuracy, complex nonlinear and imperfectly known functions such as the relationships between satellite observations of the Earth and the state of the atmosphere and the surface [
41,
42,
43,
44,
45,
46,
47,
48,
49,
50,
51]. A fundamental characteristic of these techniques is that the training process eliminates the need for a well-defined physical or numerical model that describes the relationships between the input values and output results, allowing the identification of these relationships during the learning phase. Interest in ML techniques is now also growing for parameter estimation related to snow, thanks to the increased availability of data, computational resources, and learning methods (e.g., deep learning).
Exploiting the potential of learning methods in both classification and regression analysis, several studies have been carried out to estimate snowfall and other snow-related parameters. Tedesco et al. [
52] used the neural network approach in the retrieval of snow water equivalent, and snow depth, based on Special Sensor Microwave Imager (SSM/I) data. Tabari et al. [
53] estimated snow depth and snow water equivalent using an improved neural network model. More recently, Rysman et al. [
15,
54] developed a machine-learning-based snowfall detection and retrieval algorithm for GMI (SLALOM) using CloudSat CPR coincident snowfall observations as a reference. The SLALOM algorithm is composed of random forest modules for the detection of snowfall and supercooled liquid clouds and a snowfall rate estimation module based on a gradient boosting approach. This study showed that the improvement in snowfall and high-latitude precipitation monitoring can be driven by machine-learning-based algorithms, exploiting concerted observations of active radars and passive microwave radiometers. Adhikari et al. [
37] carried out a study to detect and estimate snowfall based on NOAA-18 Microwave Humidity Sounder (MHS) radiometer data, with CPR observations as a reference, using a random forest method. Tsai et al. [
55] used a random forest classifier to map the total and wet snow-cover extent based on Sentinel–1 SAR radar data. Hicks and Notaros [
56] described a method for the classification of snowflakes based on convolutional neural networks. Roebber et al. [
57] presented a neural network approach to snowfall forecasting. Liu et al. [
58] used a deep neural network for retrieving snow depth over sea ice in the Arctic basin, based on Special Sensor Microwave Imager and Sounder measurements.
The increasing number of operational cross-track scanning radiometers that will be on board polar orbiting satellites in the future (e.g., the Advanced Technology Microwave Sounder—ATMS—and the EUMETSAT Polar System program-Second Generation EPS-SG Microwave Sounder—MWS) will require dedicated efforts to study the potential of these radiometers to improve global snowfall monitoring. The goal of this paper is to present a new algorithm for snowfall detection and retrieval applied to ATMS measurements based on machine learning techniques (Snow retrievaL ALgorithm fOr gpM–Cross Track, SLALOM-CT). As in SLALOM, developed for GMI, CloudSat CPR products are used as a reference. In recent studies [
15,
30,
48,
54,
59], the potential of the use of observational datasets built from coincident passive and active MW satellite observations for the development of satellite precipitation products has been shown. This approach differs from that based uniquely on simulations (a cloud resolving model coupled with a radiative transfer model), which was for a long time the only possible option for building a large, global cloud-radiation database [
47,
60,
61,
62,
63,
64,
65]. The availability of the CPR observations has allowed the creation of observational databases, thereby reducing the limitations deriving from the assumptions of the simulations (e.g., the microphysical scheme of the cloud model, the emissivity of the background surface, and the scattering properties of ice hydrometeors) [
21,
25,
66]. CPR, and the 2C-SNOW-PROFILE product in particular, has proven to be well suited to retrieving snowfall precipitation and very light rainfall [
36]. However, since 2011, CPR has operated in daylight only mode, due to a battery anomaly, generating biases when CPR measurements are used to monitor global snowfall on relatively large time scales (daily or more), as recently investigated [
67]. These effects, however, should not have a relevant impact on the results of this study, as only instantaneous estimates of snowfall rates and snow water path are used. Moreover, a recent study by Mroz et al. [
68] compared several satellite-based snowfall estimates with the Multi-Radar Multi-Sensor (MRMS) radar composite over the continental United States, and the 2C-SNOW-PROFILE resulted in better agreement than any other product. These studies, however, confirmed some well-known limitations of 2C-SNOW-PROFILE, in particular the underestimation of the highest snowfall rates. Additionally, Mroz et al. [
68] evidenced how passive microwave (PMW) snowfall retrieval (GPROF and SLALOM) is strongly affected by the presence of cloud liquid water. Moreover, Battaglia and Panegrossi [
69], analyzing the CPR passive signal in the W band, evidenced how supercooled water is frequent in snowfall-producing clouds. Therefore, SLALOM-CT (as well as SLALOM) includes a module for the detection of supercooled liquid water droplets.
The SLALOM-CT algorithm was developed within the EUMETSAT Satellite Application Facility for Operational Hydrology and Water Management (H SAF) as part of the development of an operational day–1 precipitation product for the EPS-SG MWS mission.
The paper is structured as follows.
Section 2 describes the dataset, focusing on the ATMS radiometer and the satellite product used in this research, together with a brief description of the machine learning techniques compared. Then, in
Section 3, the SLALOM-CT algorithm architecture and the training procedure are described.
Section 4 presents the results of the algorithm testing phase, including the analysis of the model selection. Moreover, in this section, the performances of each module composing SLALOM-CT are analyzed, in relation to the environmental conditions, and the results compared with the NASA GPM official ATMS product (GPROF-ATMS).
Section 5 critically discusses the results of this work in the context of the recent literature, and finally,
Section 6 summarizes the main results and draws the conclusions.
5. Discussion
The SLALOM-CT algorithm was trained using the CloudSat CPR 2C-SNOW-PROFILE product as a reference. CPR suffers from several sources of error and uncertainties when used for the retrieval of snowfall rates. In general, the remote sensing of snowfall remains challenging because the radiative properties of snow inside clouds are strictly related to the complex shapes of snowflakes [
3,
66,
99,
100], made by aggregations of different pristine crystals with various habits and sizes. CPR, as a spaceborne radar, suffers from additional limitations such as the contamination of the signal by the ground clutter [
101,
102], attenuation saturation of the reflectivity signal for heavy snowfall events [
3,
103], and limited coverage. Finally, CPR has worked in daylight-only mode since 2011, operating only during the “daily section” of the orbit. However, recently, Mroz et al. [
68] carried out an extensive comparison of the 2C-SNOW-PROFILE CPR product with the MRMS ground-based radar network product over the contiguous US (CONUS), demonstrating that despite all the limitations, CPR assures satisfying results in terms of snowfall detection (POD 0.78 and FAR 0.25) and estimation (RMSE 0.71 mm/h and ME −0.19 mm/h), agreeing far better than any other spaceborne snowfall product with the ground-based radar network. Moreover, CPR is currently the only available instrument capable of measuring snowfall globally (as DPR reaches 65° in latitude) and coherently, as ground-based snowfall measurements are rare, sparse, and often not well intercalibrated. Even if the SLALOM-CT algorithm achieved perfect training, it would reproduce the CPR snowfall retrievals faithfully but would be prone to CPR limitations, one of the most relevant being the considerable snowfall rate underestimation. However, some of the CPR limitations, such as the limited swath and the daylight-only mode observations, are potentially overcome by the SLALOM-CT algorithm. An additional uncertainty of SLALOM-CT arises from the dataset of coincident observations from CPR and ATMS that was used in the training phase; in particular, the narrow swath of CPR compared to ATMS could introduce further uncertainties in the SLALOM-CT retrieval estimates.
In the training of SLALOM-CT, we firstly carried out a systematic model selection, comparing different pixel-based and image-based machine learning algorithms. The analysis focused on two specific problems: the detection of the snowfall rate areas (SD module) and the estimate of the snow water path (SPE module). The results of this intercomparison paved the way for a number of considerations. First, the performances of NNs are systematically better than those of decision tree algorithms (random forests and gradient boosting) for both SD and SWP estimation problems. This result is not necessarily generalizable to other radiometers, as it is strictly related to the specific characteristics (in terms of size and signal-to-noise ratio) of the dataset used and to the channels and viewing geometry of the radiometer considered. However, for ATMS snowfall retrieval, NNs seem to be more promising than ensemble trees. Therefore, the NN approach was chosen for the SCD and SR modules, with only a limited testing of different approaches (not shown here). A second result arises from the comparison of pixel-based and image-based neural networks. The convolutional neural networks that were chosen for this study take as input a 7 × 7-pixel image for each input variable (i.e., 16 BTs and 18 ancillary variables), and produce the output (for the estimate or classification) in the central pixel of the image. These architectures are therefore similar to the pixel-based networks and allow a direct comparison of the pixel- and image-based approaches. In particular, the main differences between the pixel- and image-based NN results should come from the contribution that the pixels surrounding the central pixel can provide to the solution of the given problem. In the framework of precipitation retrievals from PMW sensors, the use of information from surrounding pixels has already been explored by some authors. The convolutional NN approach to this problem is, however, completely different, as the optimization of convolutional weights that are trained to recognize and extract specific features from the BT image is far more sophisticated and promising.
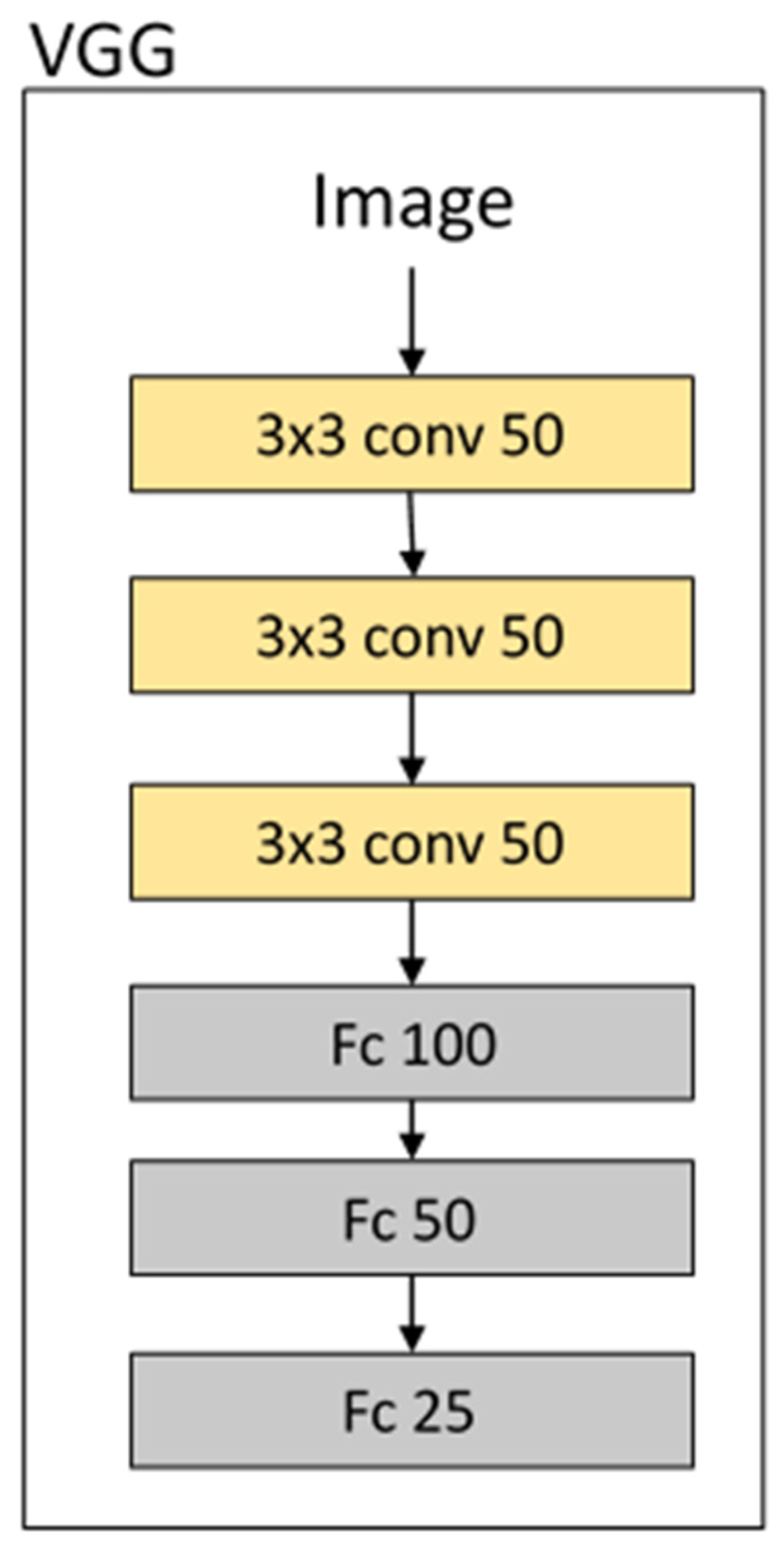
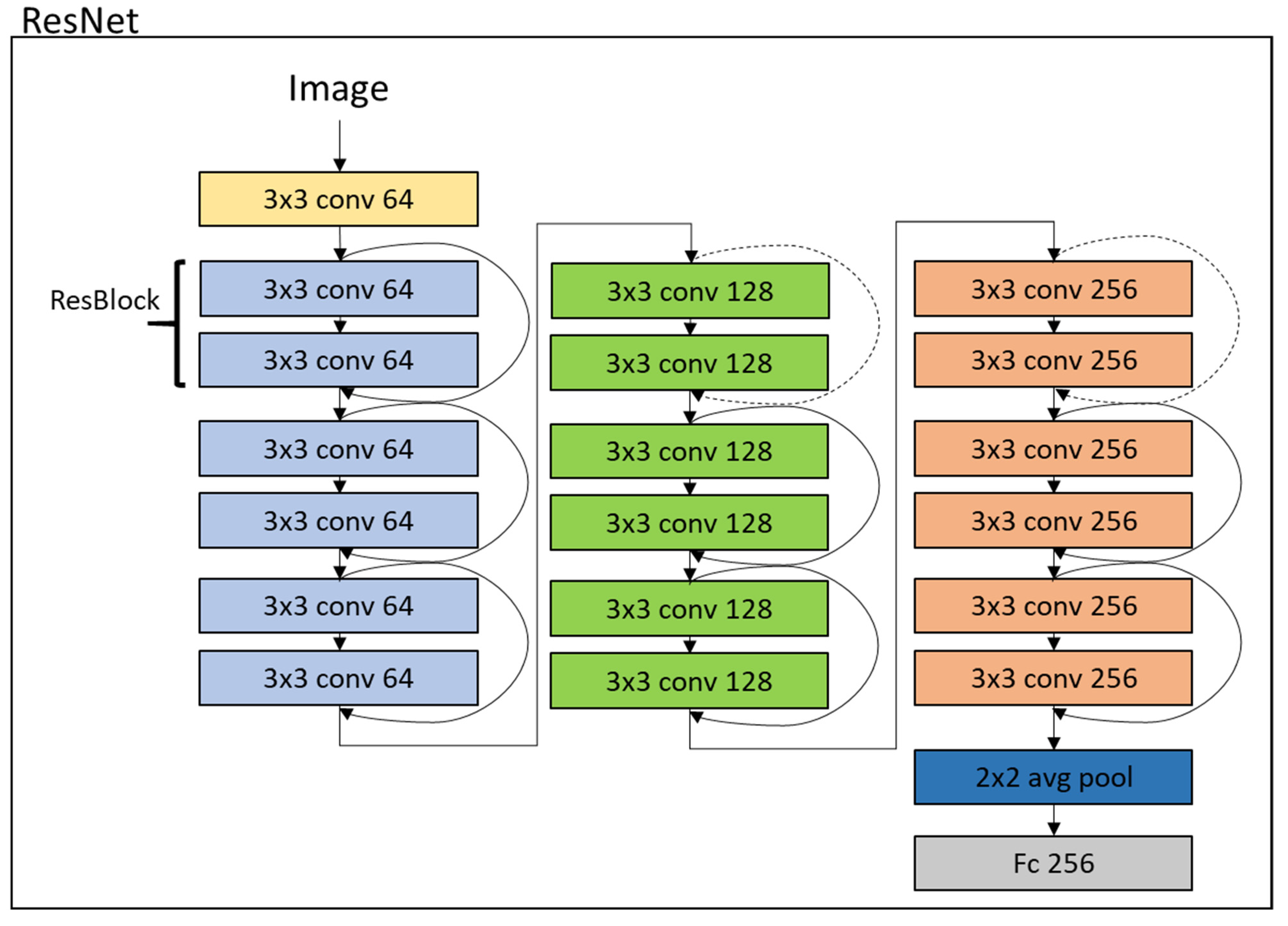
For our applications, some examples of features that we can extract from BTs are gradients and convex or concave shapes, together with combinations of these (including their variability with the channel frequency). Another point that is important to stress is that the NNs tested differ in their depth or complexity. One main result in the model selection is that, in our case, there is a limit to the complexity of the model that can successfully solve a given problem, and this limit is set by the size of the training dataset and by the noise level associated with the variables in it. In our case, the shallow pixel-based network was the most efficient model for the SPE problem, while the relatively simple VGG model was the most suitable for the SD problem. Evidently, in this second case, the contribution provided by the surrounding pixels was substantial. Moreover, ResNet (deeper and more complex than VGG) gave a worse performance than the simpler networks due to the limited size of the dataset. However, the fact that all results from NNs are quite similar supports the hypothesis that all the algorithms trained reached the maximum level of accuracy, strictly related to the noise level.
The SLALOM-CT algorithm produced very good results, which is satisfying given the complexity of the remote sensing of snow. The quality of these results was also highlighted by the comparison with a reference algorithm (the NASA GPM official PMW precipitation retrieval algorithm, GPROF). SLALOM-CT was compared with GPROF using CPR as a reference, showing smaller errors and far better detection capability. This was confirmed also by comparing SLALOM-CT with GPROF over snow-covered surfaces, where GPROF uses, as precipitation information in the a priori database, the MRMS precipitation rate. With regard to this comparison and in particular to the results of GPROF, it should be mentioned that in some studies on the quality assessment of GPROF-GMI V05 snowfall rate estimates, some issues were also noted. In an assessment carried out over southern Finland, a very low ability to detect shallow snowfall events was found for GPROF-GMI [
104]. Moreover, in a study on intense lake-effect snow events over the lower US Great Lakes region, Milani et al. [
105] found that GPROF-GMI misses and/or underestimates intense (and shallow) lake-effect snowfall. Skofronick-Jackson et al. [
2] also provided additional evidence of the GPROF-GMI shallow convective snowfall detection limitations. The results of GPROF-GMI are not directly comparable to those of this work, because of the many differences between the two radiometers. Moreover, a fair comparison of SLALOM-CT and GPROF-ATMS should be based on a reference dataset not used in the training or as a priori information in either of the two algorithms. However, the Mroz et al. study [
68], where an extensive validation of SLALOM and GPROF (for GMI) was carried out using the MRMS product, showed poorer results for GPROF, which evidently were not due to the selection of the reference dataset. The different results found for SLALOM-CT and GPROF can be attributed to the characteristics of the two algorithms, namely the input variables used (GPROF ignores the ATMS 50–60 GHz channels and uses a daily snow-cover/sea ice map and fewer model-derived variables) and the retrieval technique (Bayesian vs. machine learning). Complex machine learning algorithms (such as those of SLALOM-CT) are able to discriminate more efficiently between the subtle and complex signal of snowfall and the variable and misleading contribution due to the background surface, environmental conditions, and supercooled liquid water within the cloud. Moreover, recently, a set of snowfall detection algorithms over ocean, sea ice, and coast, based on logistic regression for ATMS was developed, using CPR as a reference [
106]. This algorithm has good detection capabilities (i.e., a POD and FAR equal to 79% and 35%, respectively, over ocean and slightly worse values over sea-ice and coastal areas); however, SLALOM-CT shows better performance over both ocean and coast (see
Table 8), and also over sea ice (aggregated statistics for the PESCA sea ice surfaces were 82%, 20%, and 63% for POD, FAR, and HSS, respectively). These results confirm the ability of the machine-learning-based approaches to learn and generalize the relations between the ATMS channels and the CPR snowfall rates. However, in a recent study by Adhikari et al. [
37], the RF-MHS algorithm was trained using random forests for detecting and estimating snowfall rates from MHS BTs using CPR as a reference. The performance of RF-MHS was worse than SLALOM-CT, in both detection (POD of 0.55 and FAR of 0.45) and snowfall estimate statistics (RMSE of 0.23–0.40 mm/h, correlation of 0.23–0.57). The disagreement in the results was probably related more to the differences in the input used (MHS carries only five channels at high frequency, and the authors use a very limited number of environmental variables) than to the machine learning approach chosen. In fact, even comparing the ATMS RF snowfall detection statistics (see
Table 5) with those of RF-MHS, a large disagreement is still present.
In a recent study by Takbiri et al. [
97], it was shown that the liquid water content of clouds and the snow-cover depth impact the observed BT signals in high-frequency channels and can mask the relatively small signal due to snowfall. In particular, the emission due to liquid water tends to enhance the BTs, while a deeper snow cover tends to lower the surface emissivity, and these effects tend to mask the scattering signal produced by snowflakes. The authors define some conditions in terms of snow depth and LWP (i.e., a snow depth greater than 200 kg m
−2 SWE and cloud LWP lower than 100–150 g m
−2) as a blind zone, where the PMW cannot detect or estimate snowfall. In our study, we observed that the presence of liquid water has a strong impact on the detection of snowfall (increasing the rate of false alarms), while we did not notice any impact from snow-cover depth. This may be due to the categorization of snow cover at the time of the overpass that was performed by the PESCA algorithm and used as input in SLALOM-CT. Another explanation could be that our algorithm can better discriminate the signal produced by snowfall from those due to surface-related or atmospheric effects, compared with the analysis carried out in [
97], where the analysis focused on GMI high-frequency window channels only (89 and 166 GHz). Moreover, our analysis showed that SLALOM-CT error statistics were almost independent of the surface category, which strongly affects the ground emissivity, as shown in Camplani et al. [
93]. We can assume that the NN modules within SLALOM-CT can exploit the categorization of the surface and use this information to mitigate the issues deriving from the extremely variable emissivity of the cold surfaces (snow cover and sea ice). It should also be highlighted that the SLALOM-CT performance is not affected by the observation angle, even though the ATMS view geometry, as a cross-track radiometer, is considerably more complex than conical scanners. The viewing geometry affects both the geometrical thickness of the observed atmosphere and the emission spectrum of the ground, with significant effects also in the polarization of the signal emitted by the surface. The fact that SLALOM-CT error statistics seem to be independent of the viewing geometry confirms that, during the training phase, the observation angle (which is one of the SLALOM-CT inputs) was optimally exploited.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}