
Estimation of Winter Wheat Tiller Number Based on Optimization of Gradient Vegetation Characteristics


 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
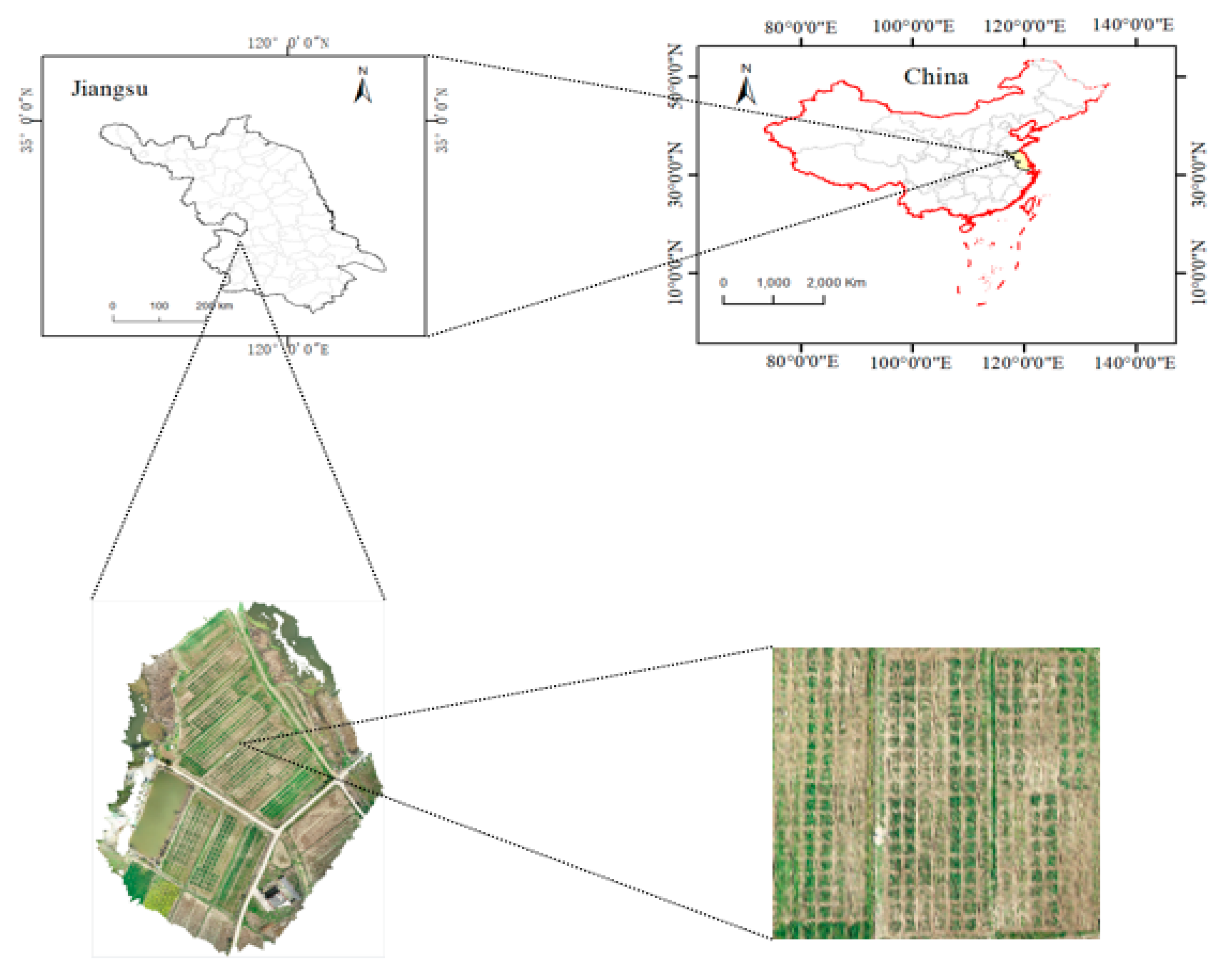
2.1. Field Experiments
2.2. Data Acquisition
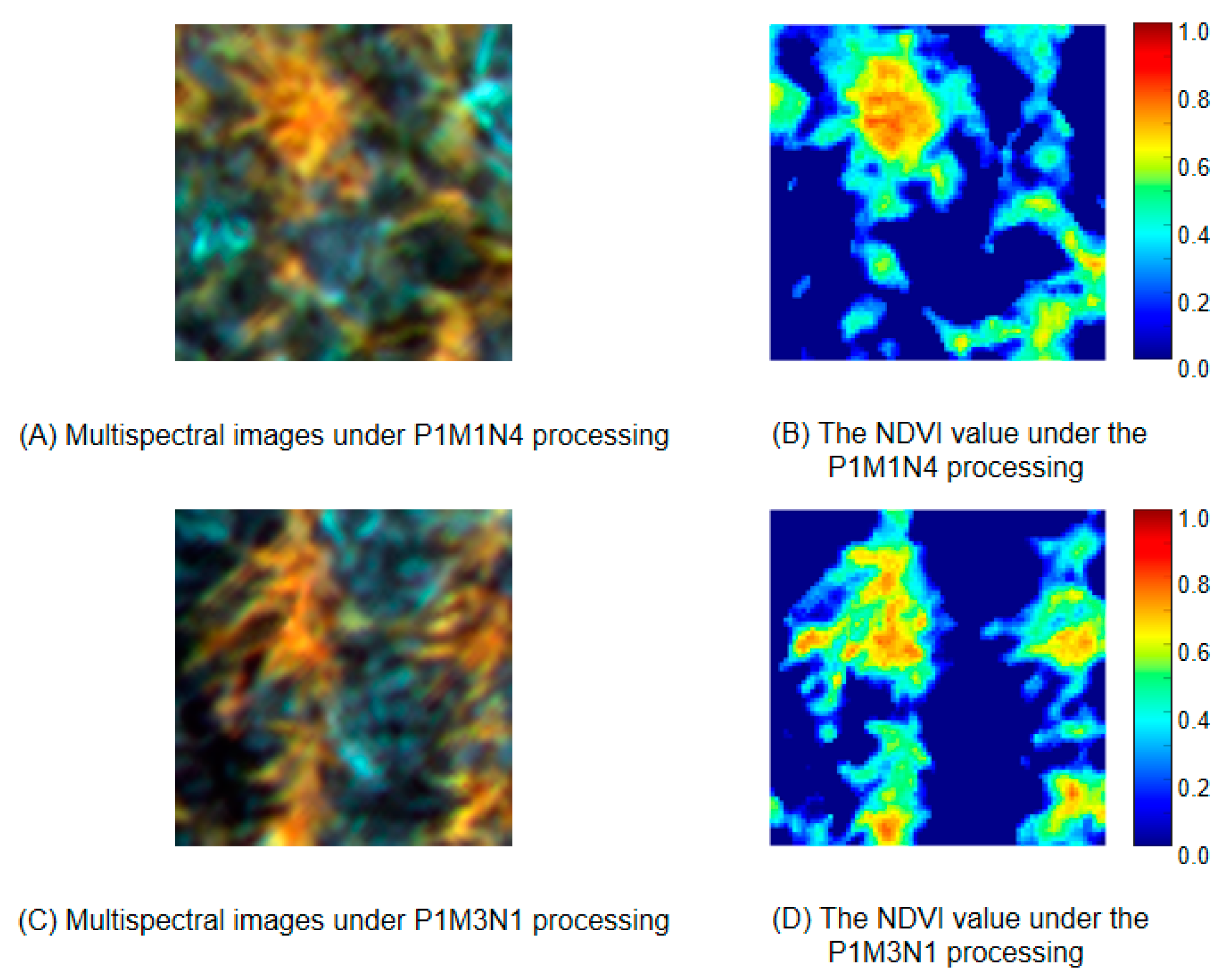
2.2.1. Multispectral UAV Image Acquisition and Processing
2.2.2. Determination of Winter Wheat Tiller Number
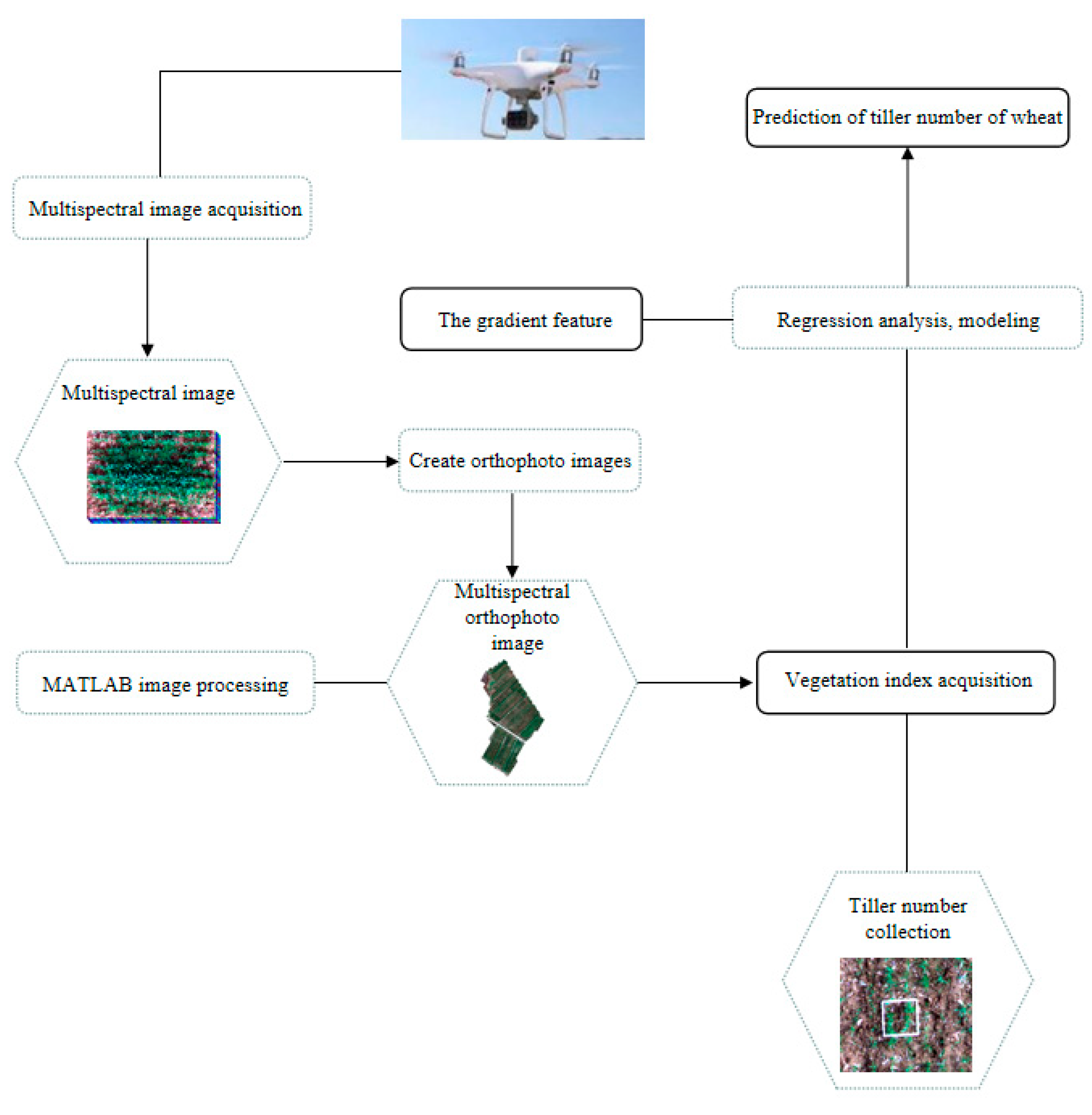
2.2.3. Feature Extraction
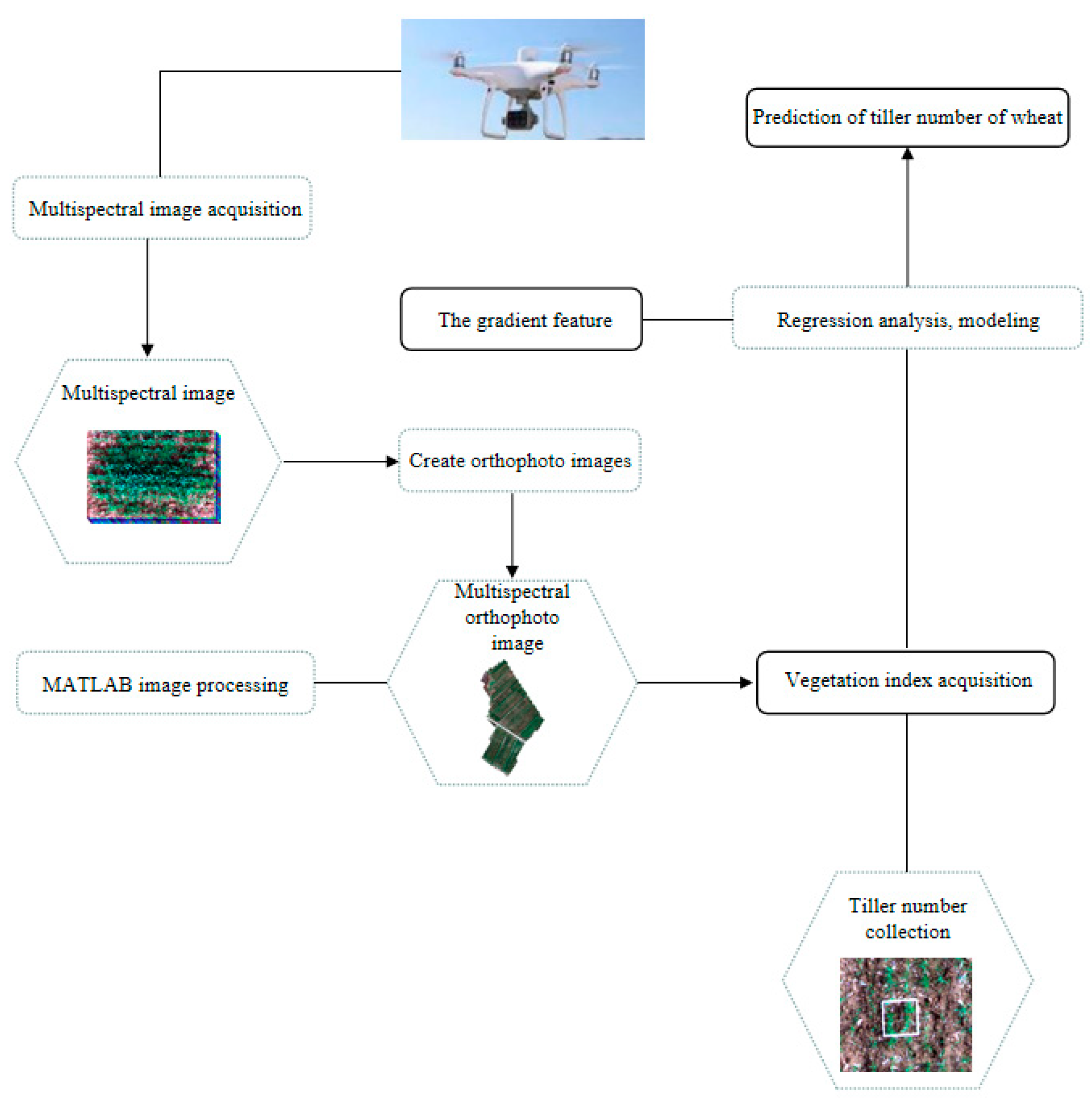
- (1)
- Data acquisition and preprocessing: a UAV obtained multispectral orthophoto images of the test site, and the images were then corrected and spliced.
- (2)
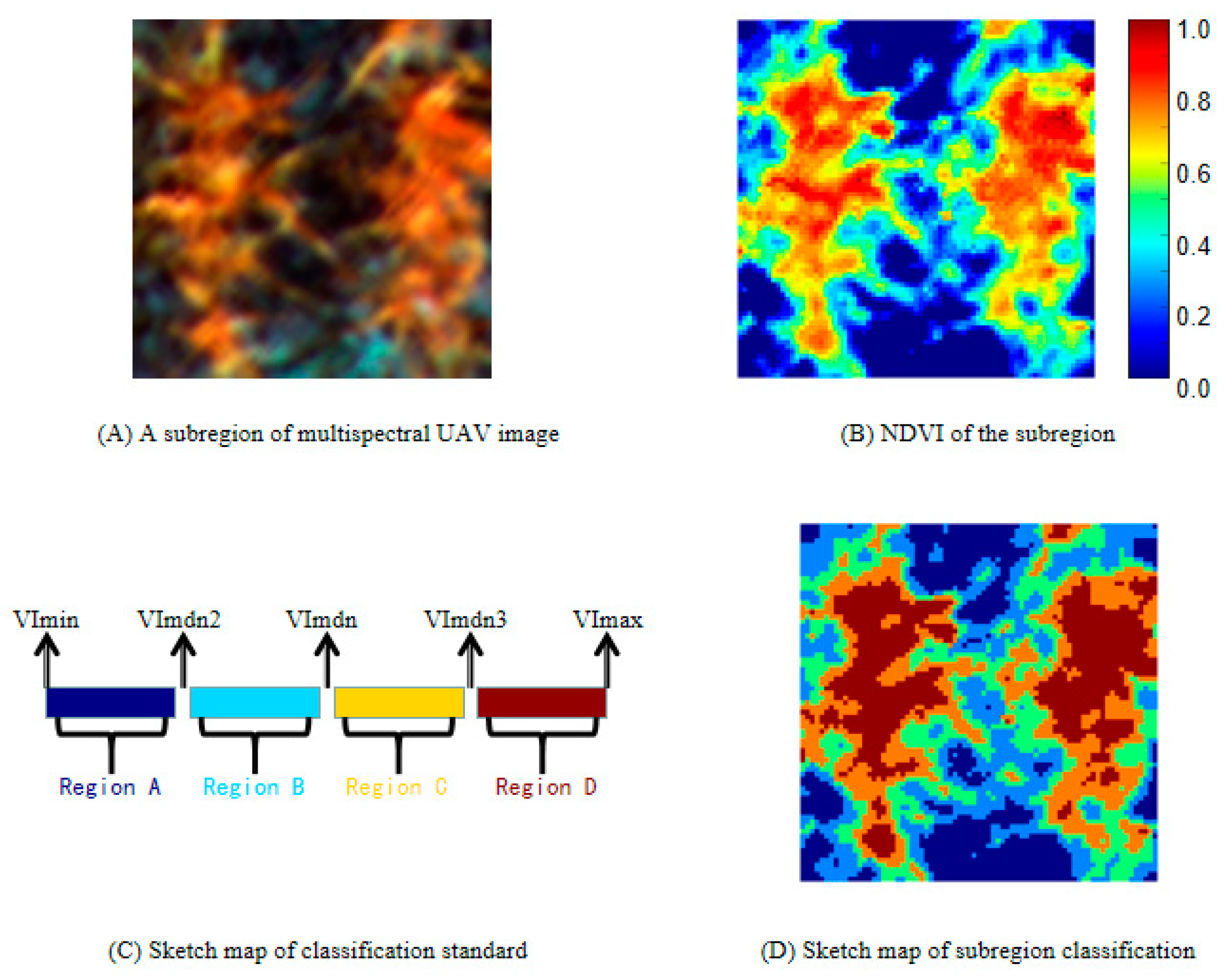
- Selection and structure of vegetation index: vegetation indices sensitive to tiller number were identified, the UAV multispectral range was selected to obtain images, and coverage and gradient characteristics were determined.
- (3)
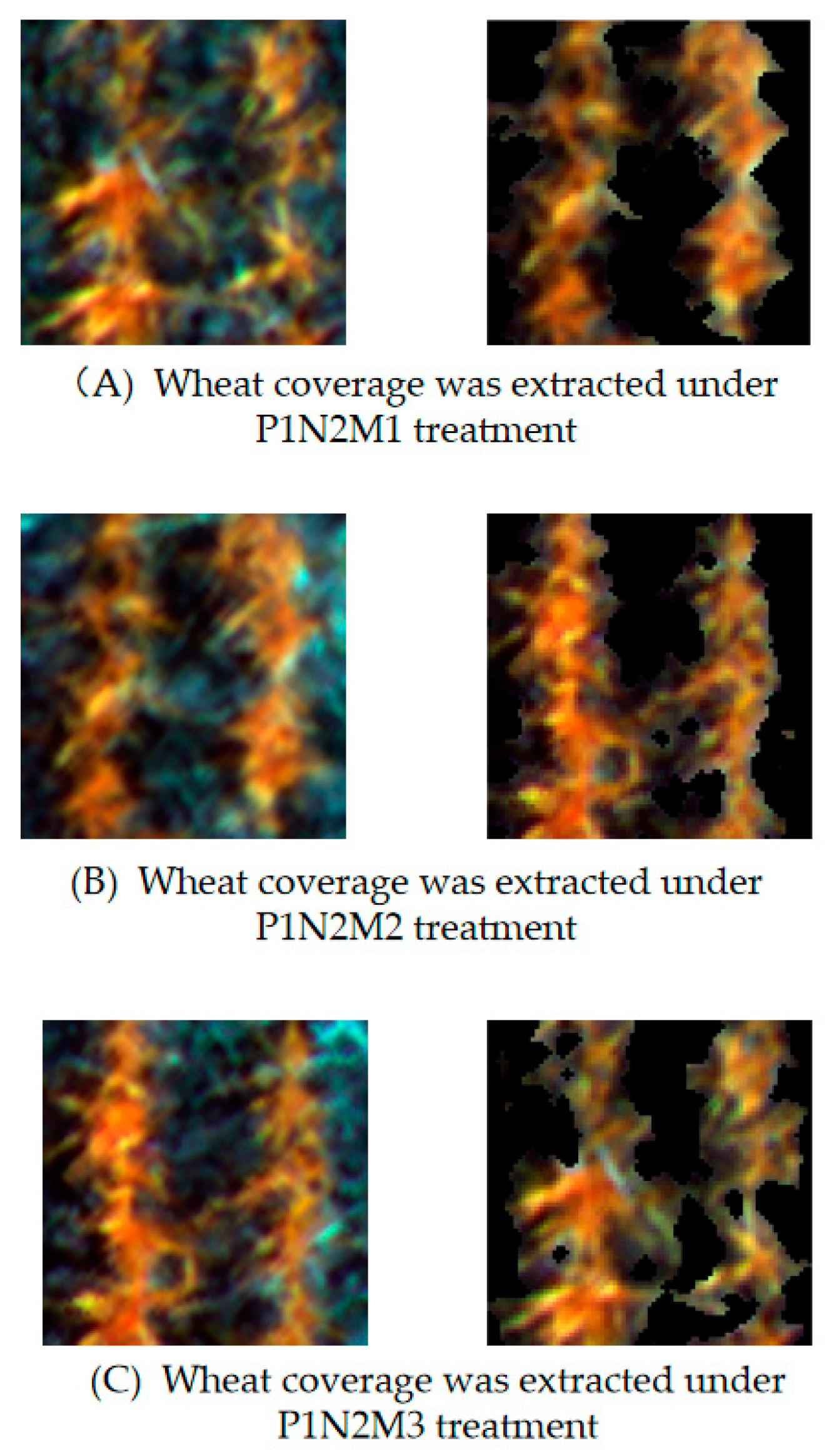
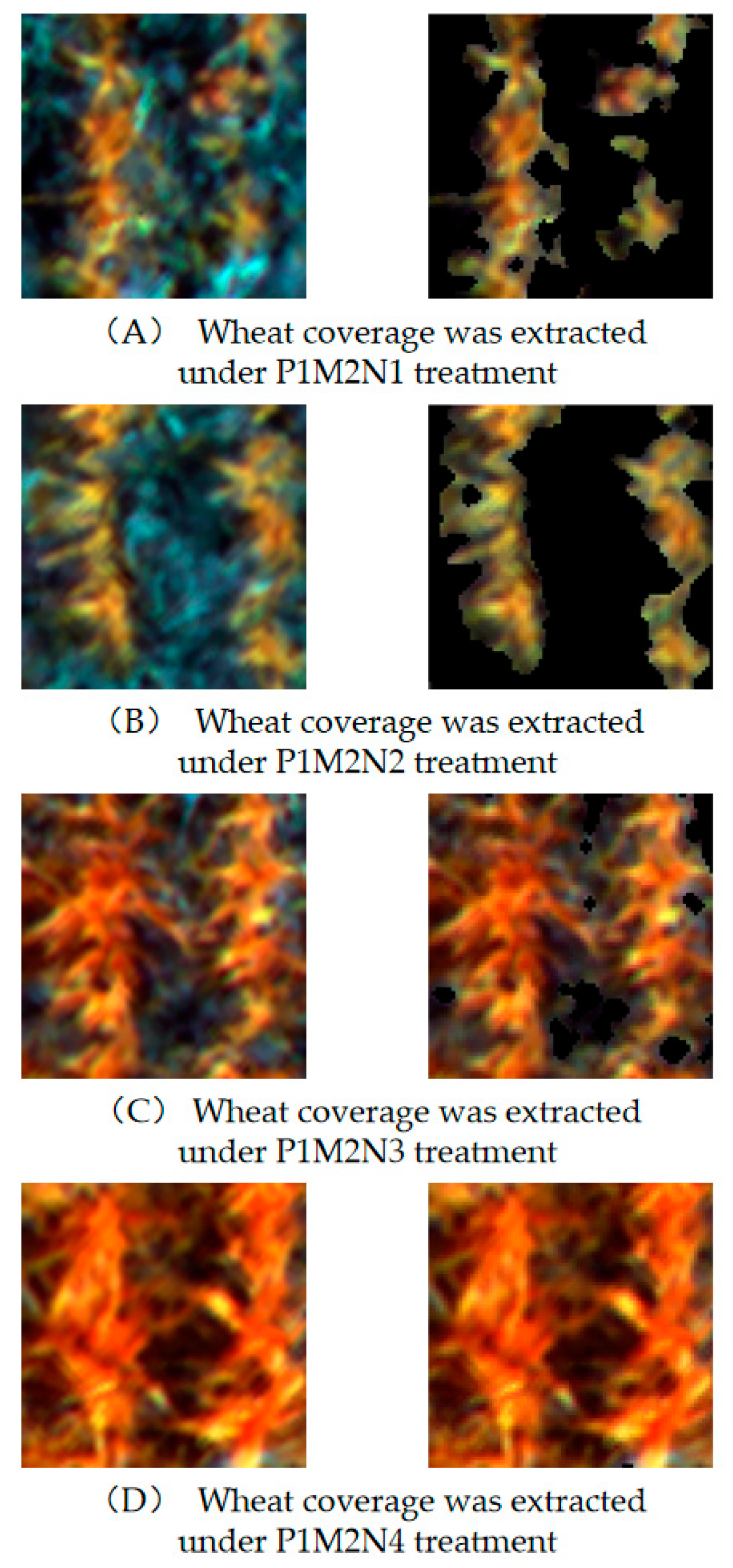
- Analysis and comparison: vegetation indices and coverage were analyzed with wheat tiller number and results were compared after optimization of gradient special diagnosis.
- (4)
- Estimation of wheat tiller number in the whole field: models that provided good estimations were used to predict wheat tiller number in the whole field.
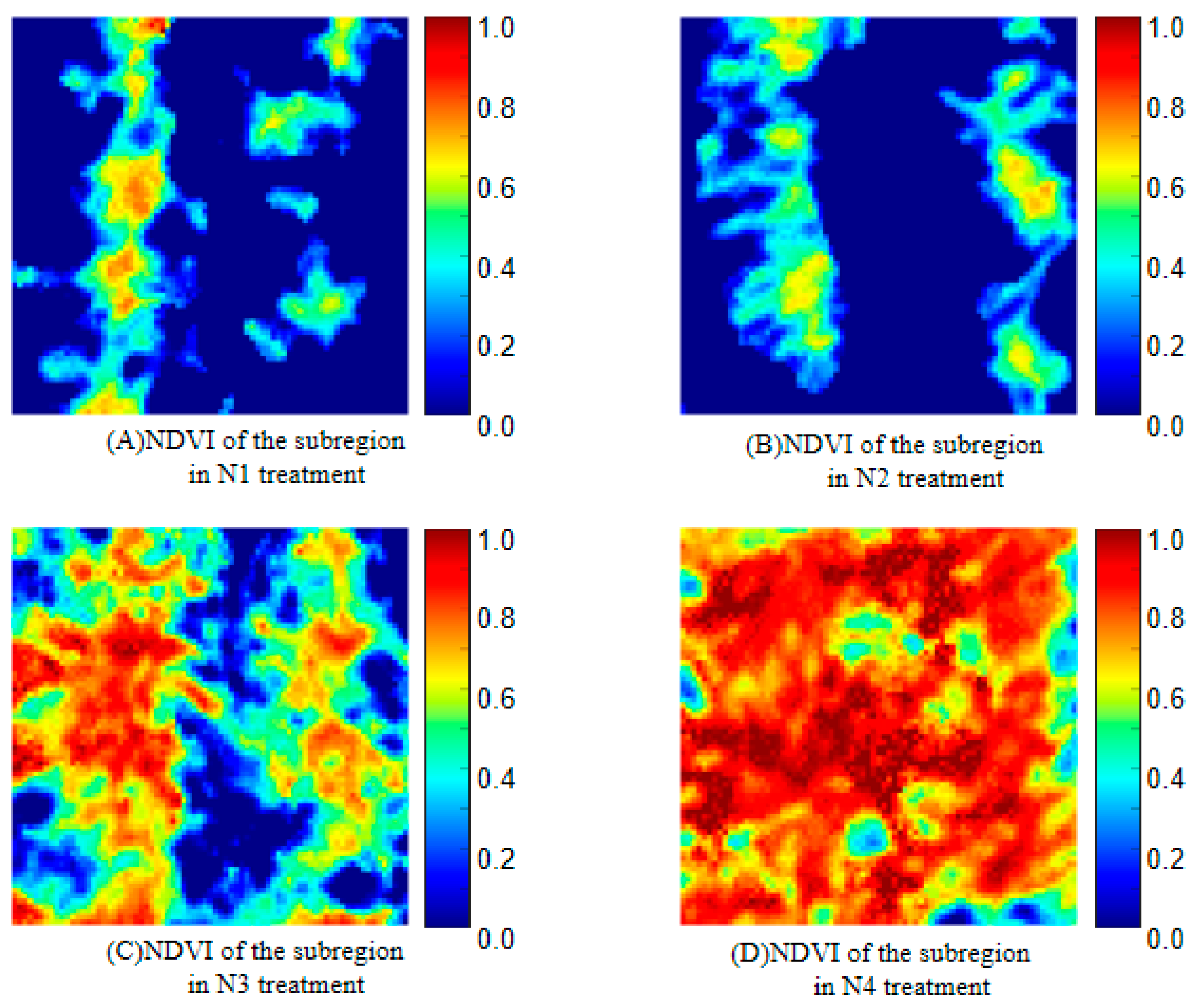
2.2.4. Analysis of Characteristics
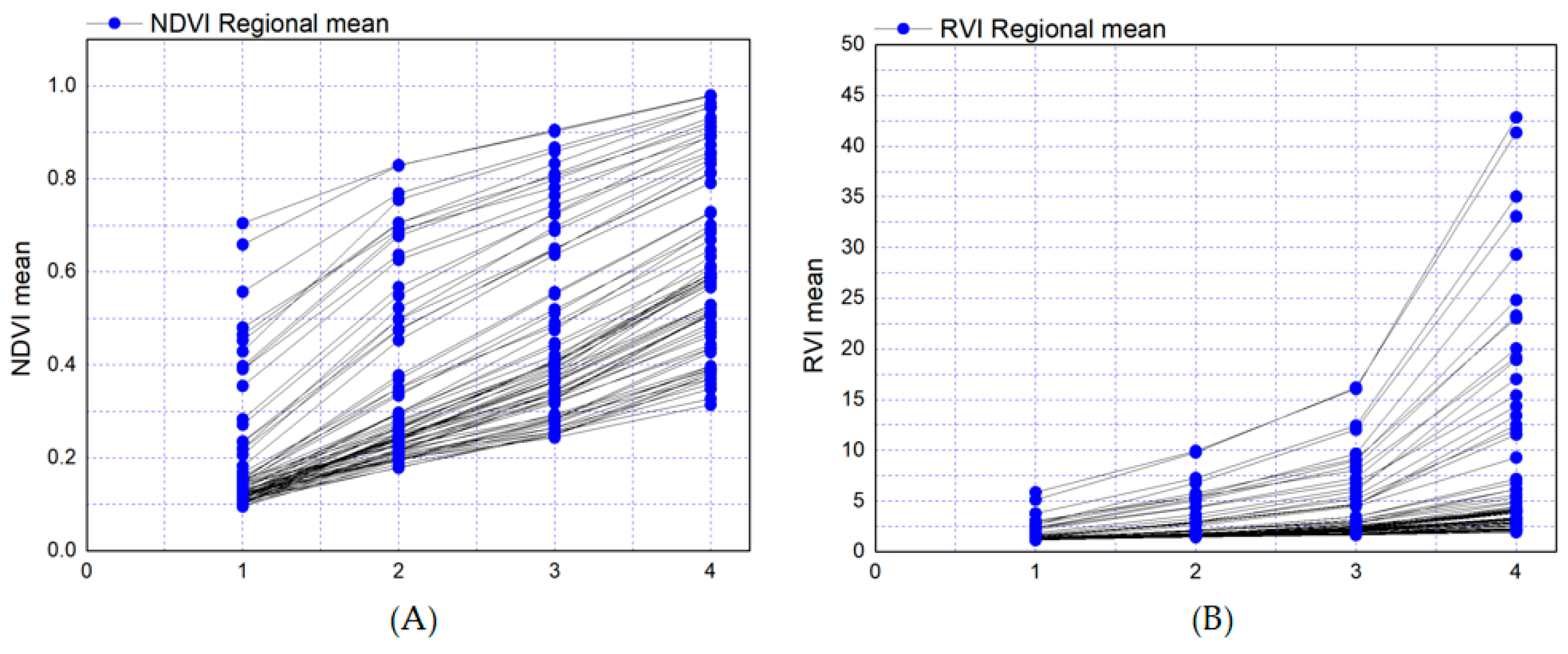
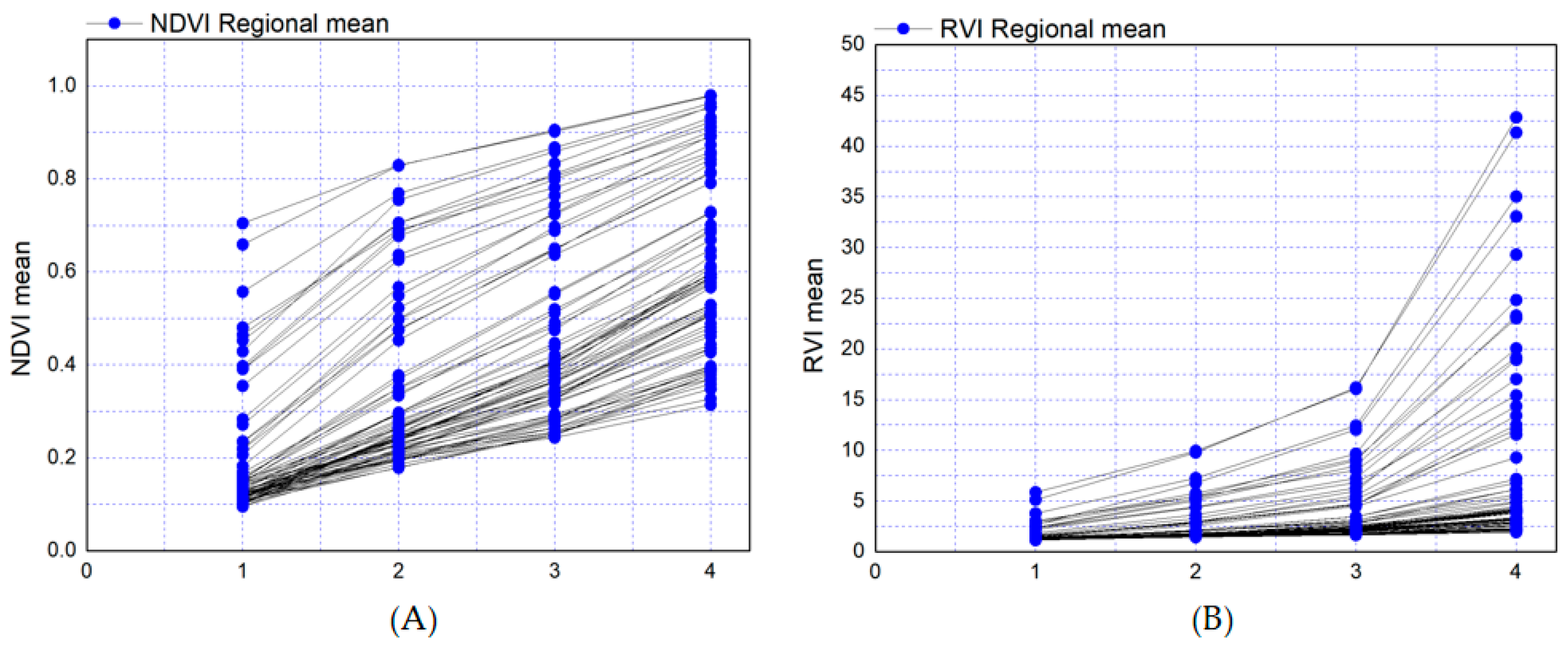
2.2.5. Selection of Vegetation Indices
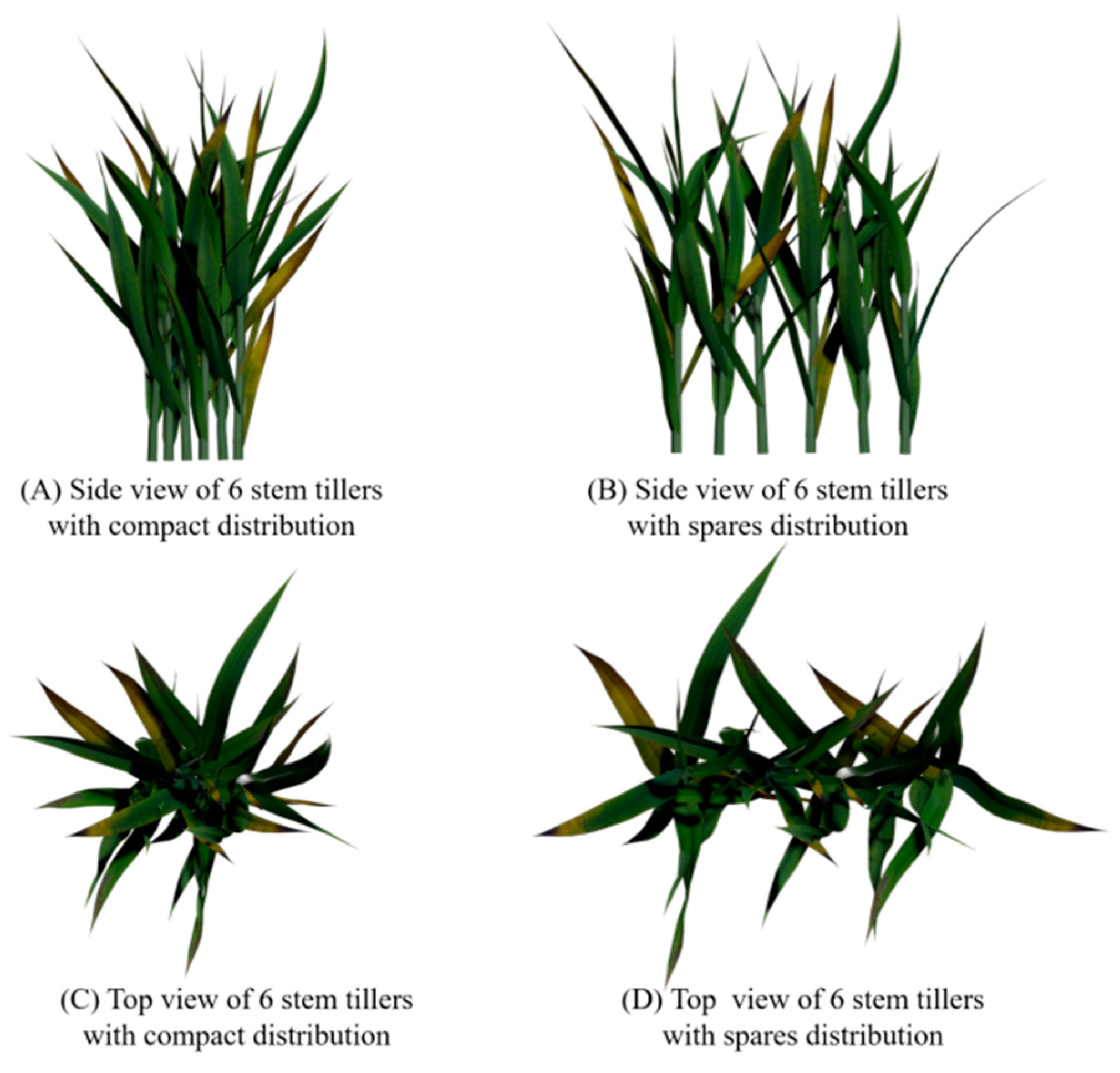
2.3. Gradient Feature
2.4. Modeling
2.4.1. Linear Regression Model
2.4.2. Gradient Feature Optimization Model
2.5. Statistical Analysis
3. Results
3.1. Estimation of Tiller Number in Wheat
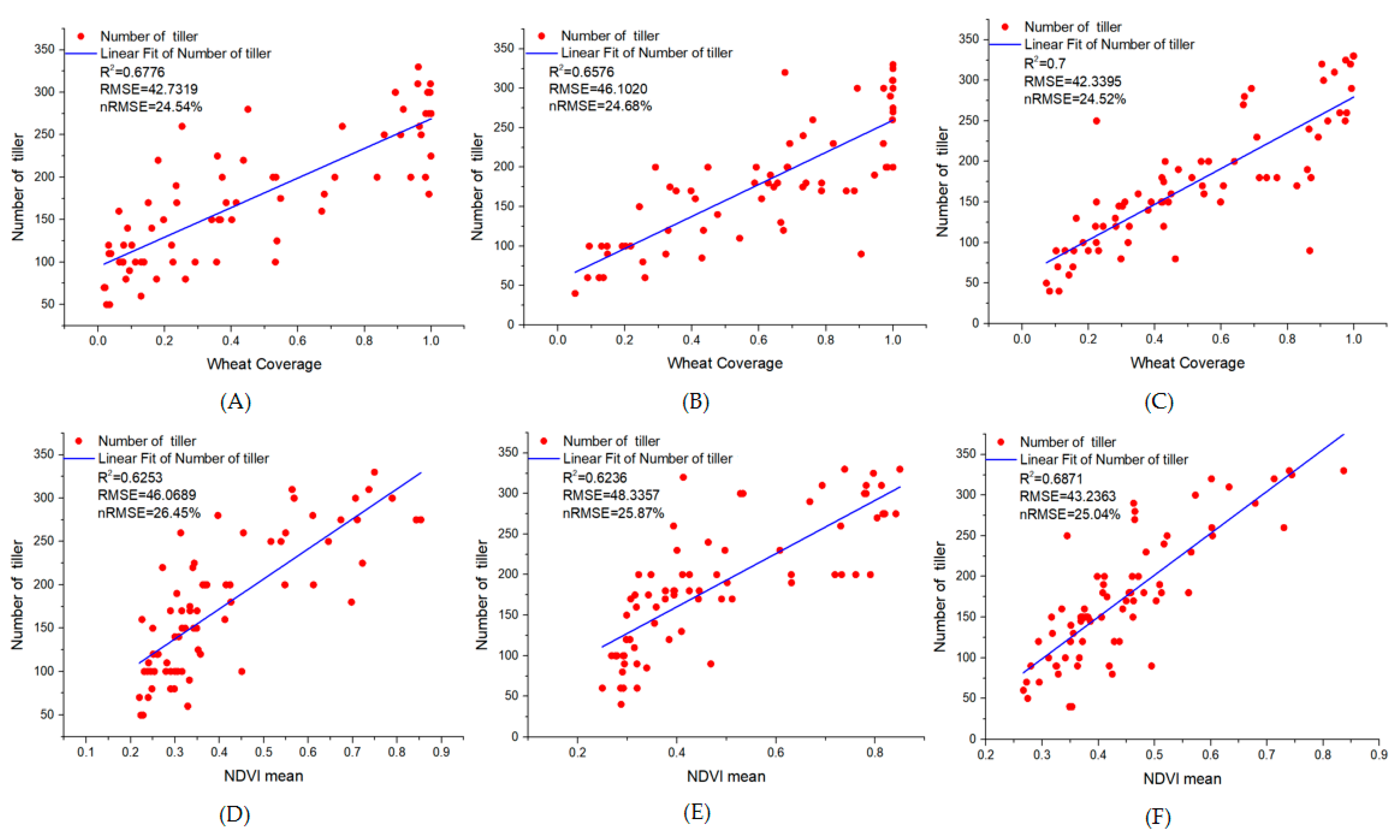
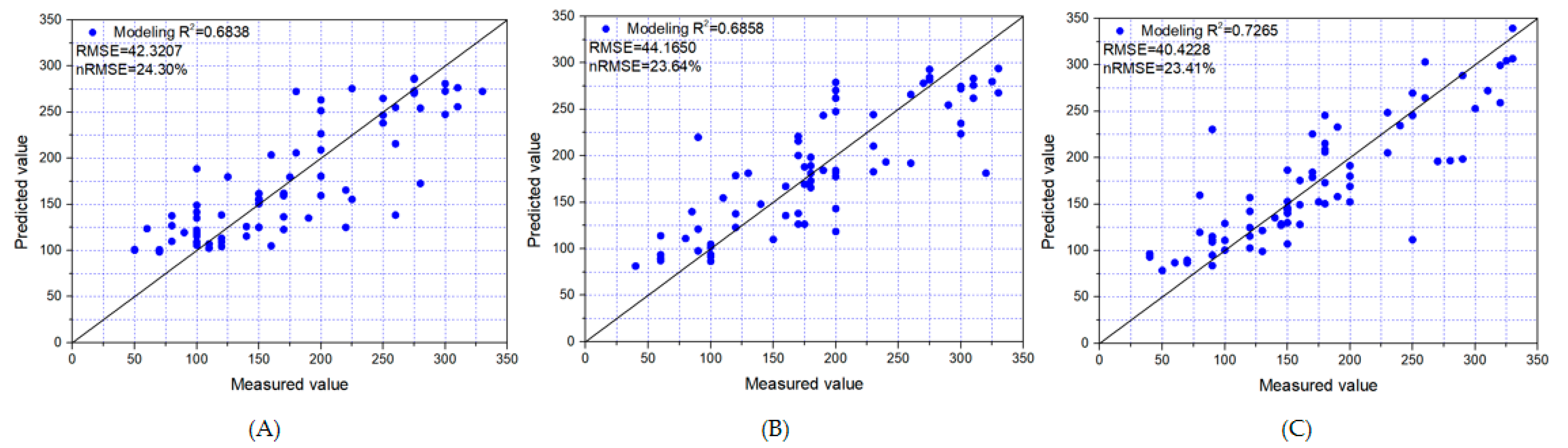
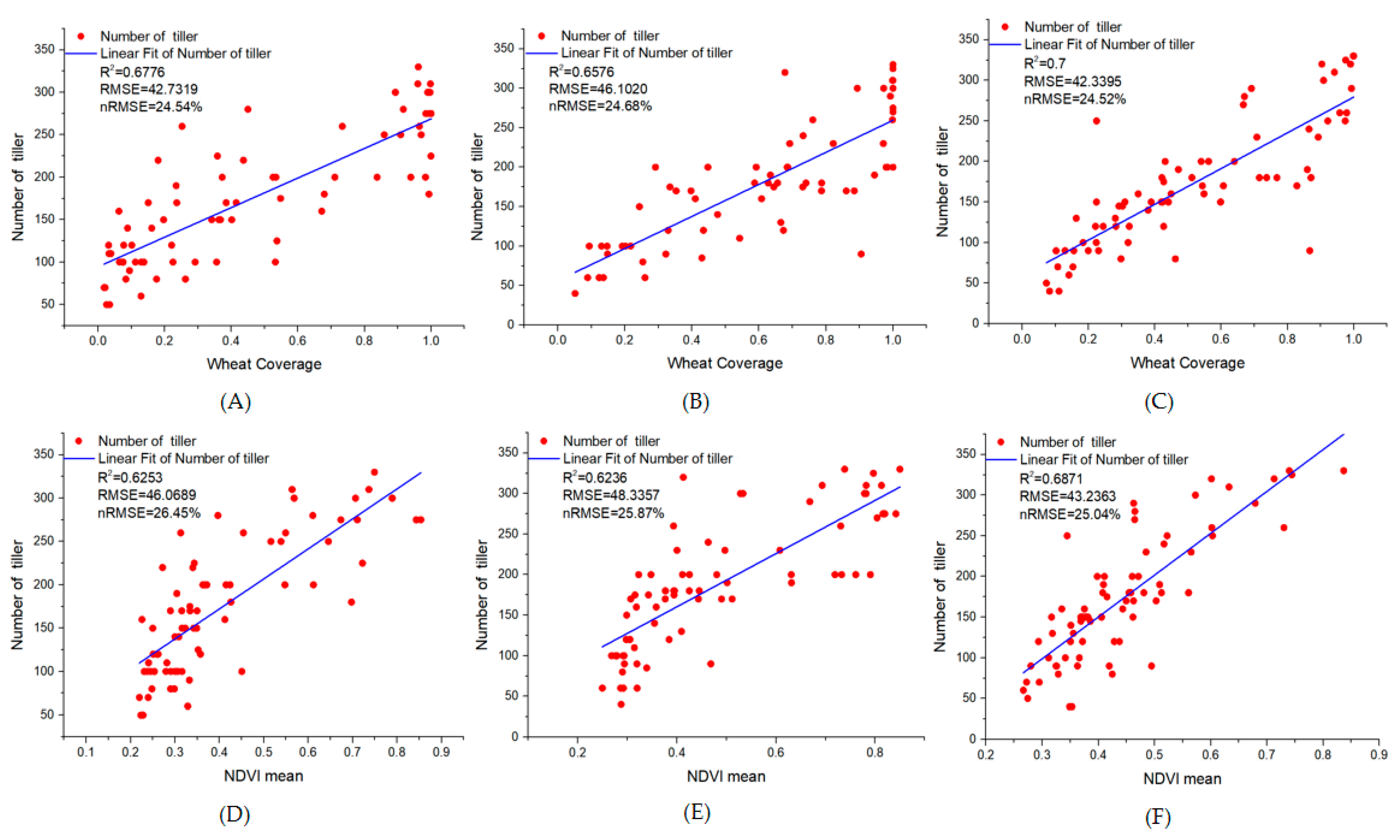
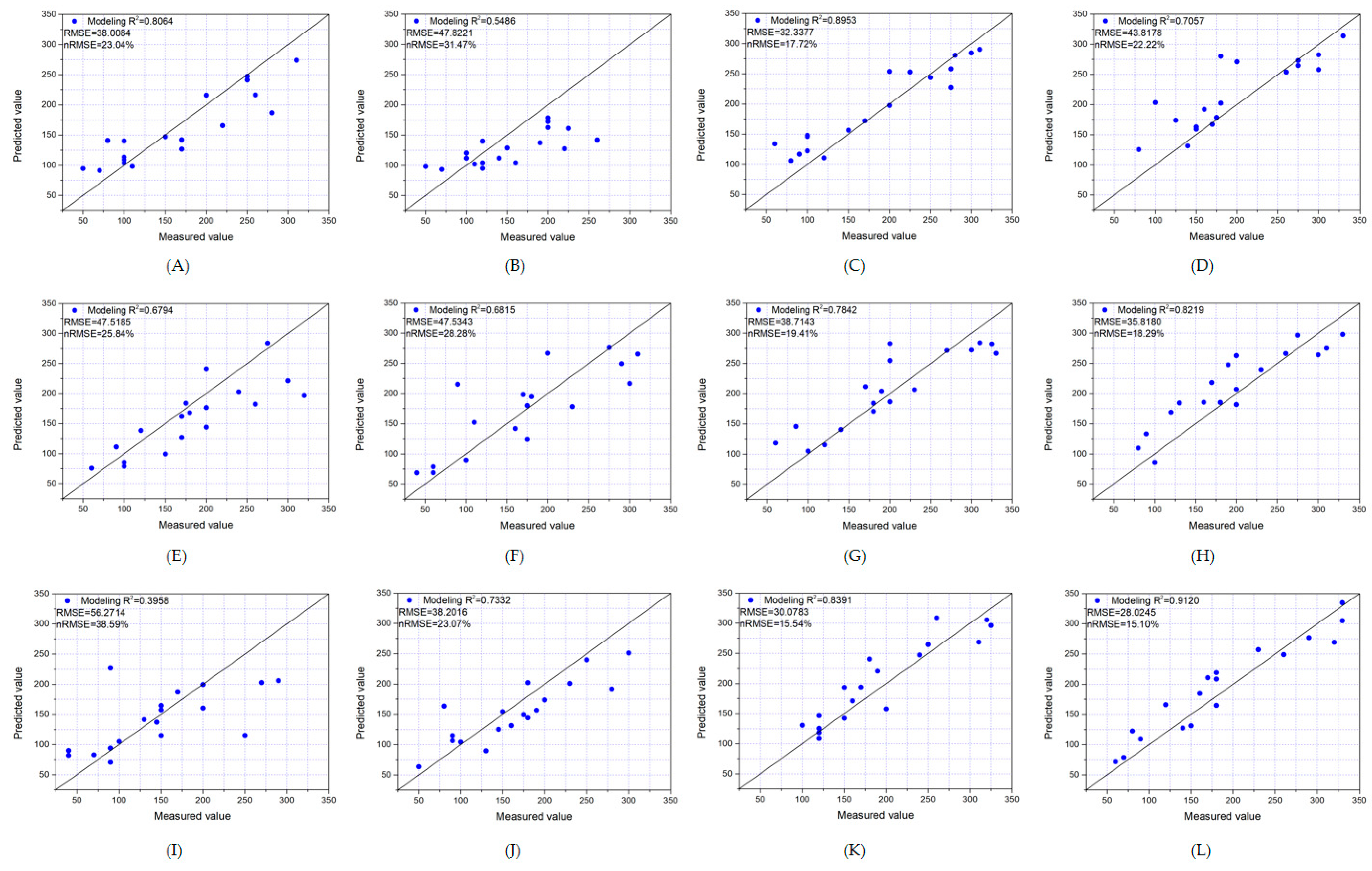
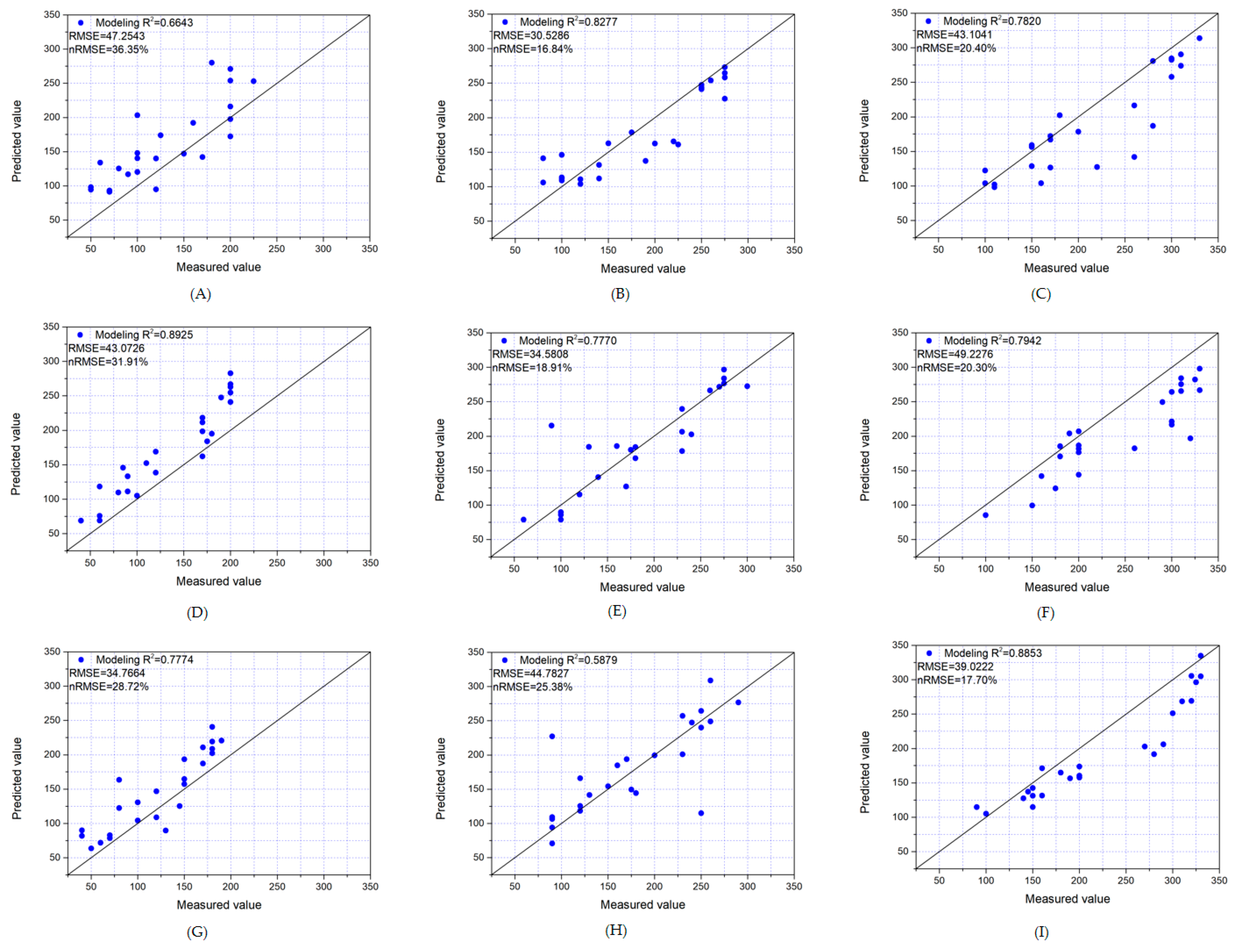
3.1.1. Unitary Linear Regression Analysis
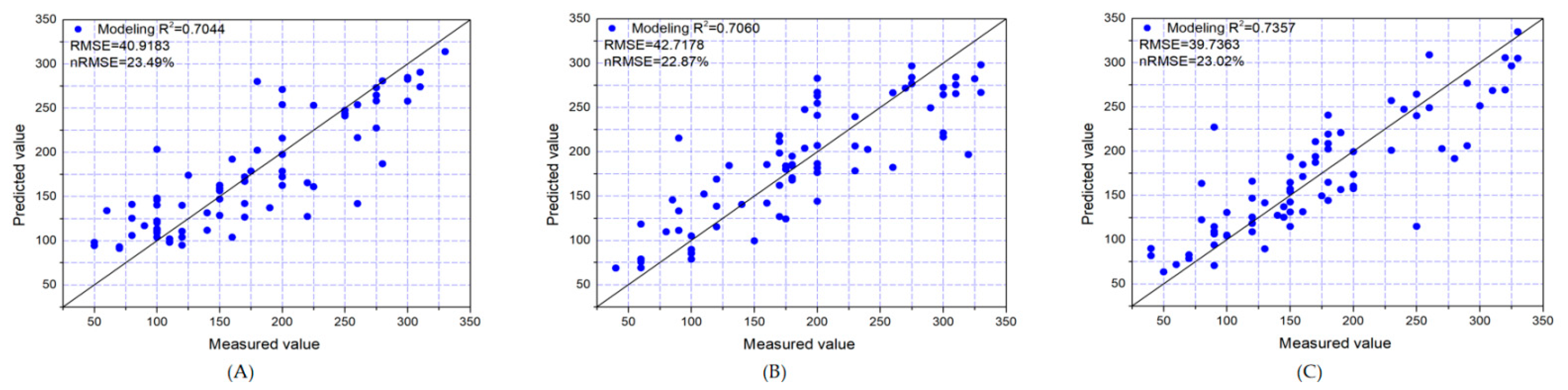
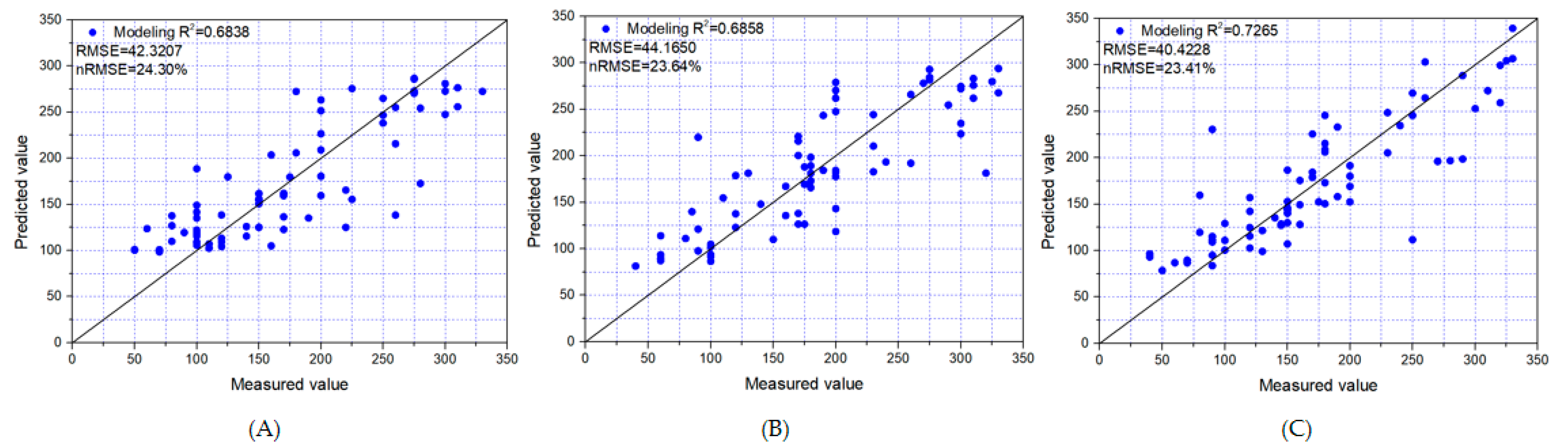
3.1.2. Multiple Linear Regression Analysis
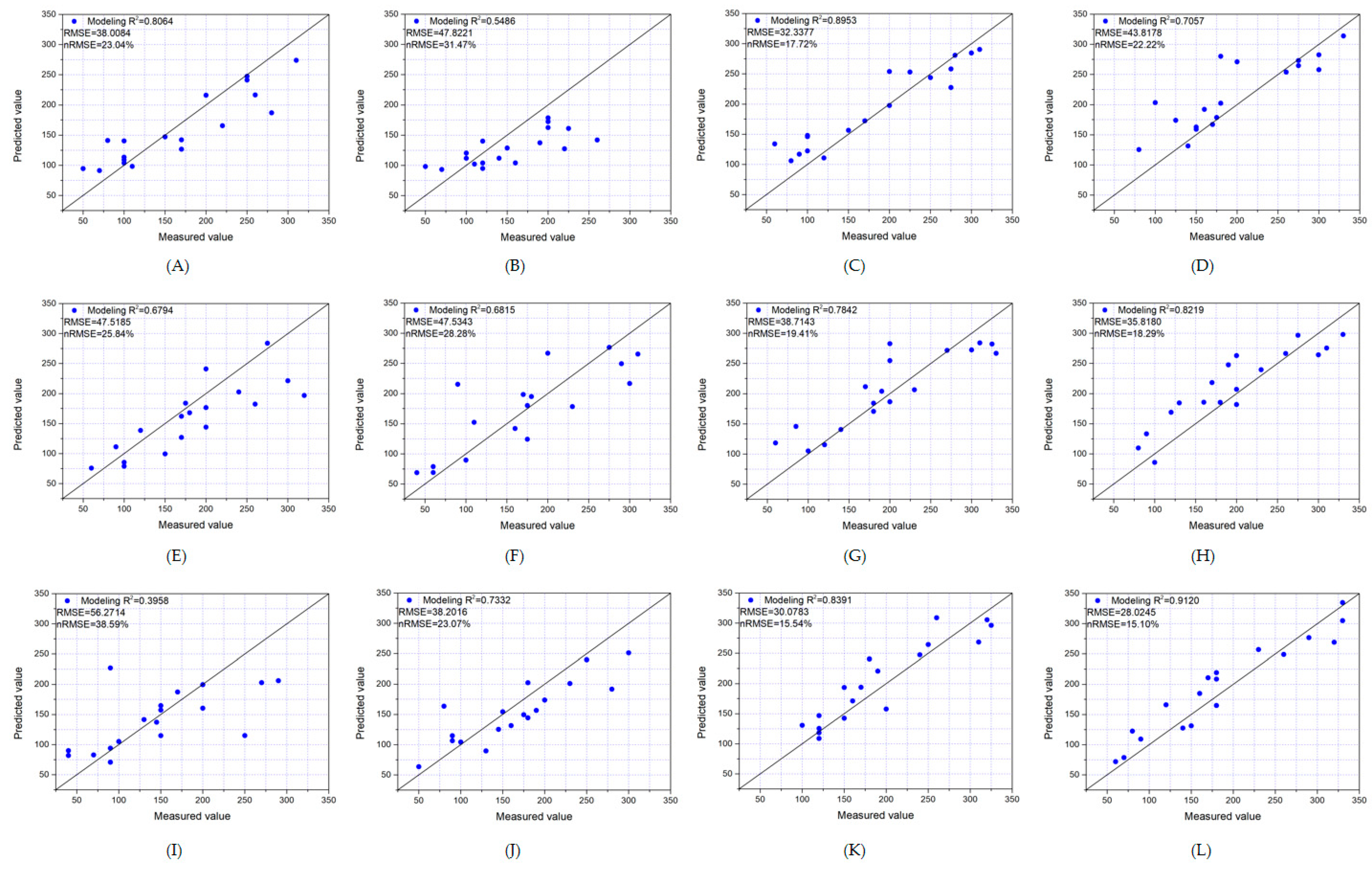
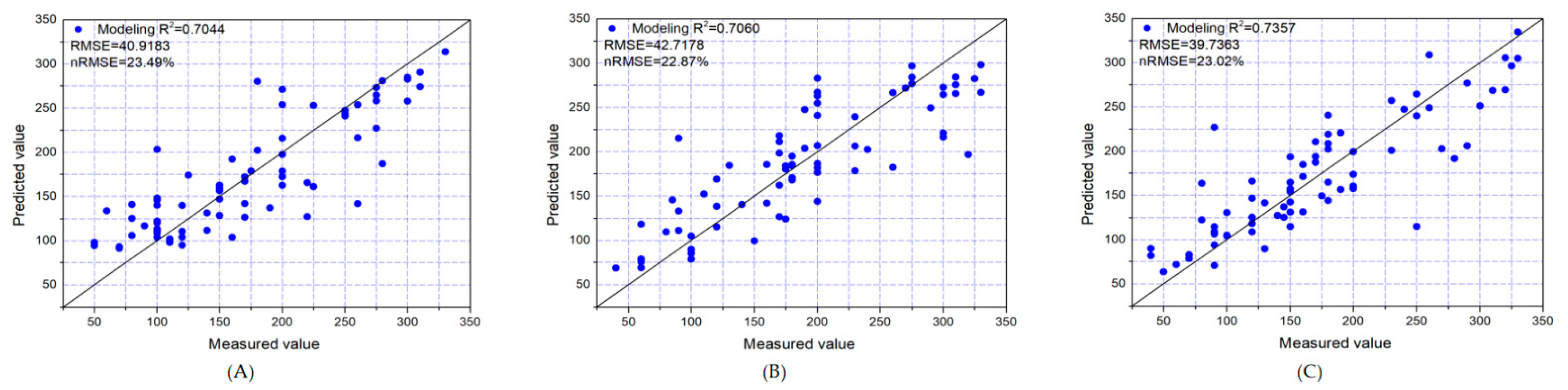
3.1.3. Estimation of Wheat Tiller Number after Optimization with Gradient Characteristics
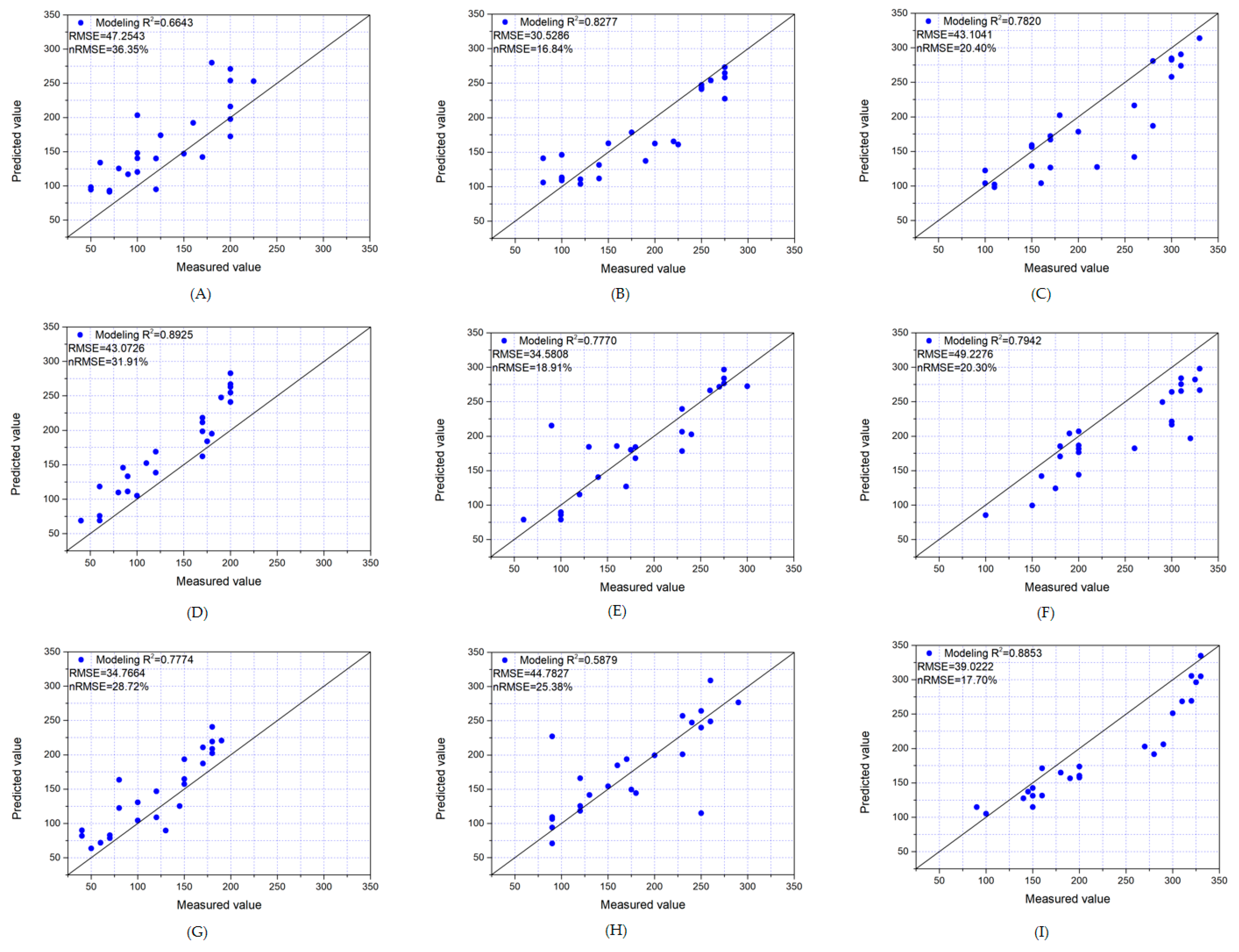
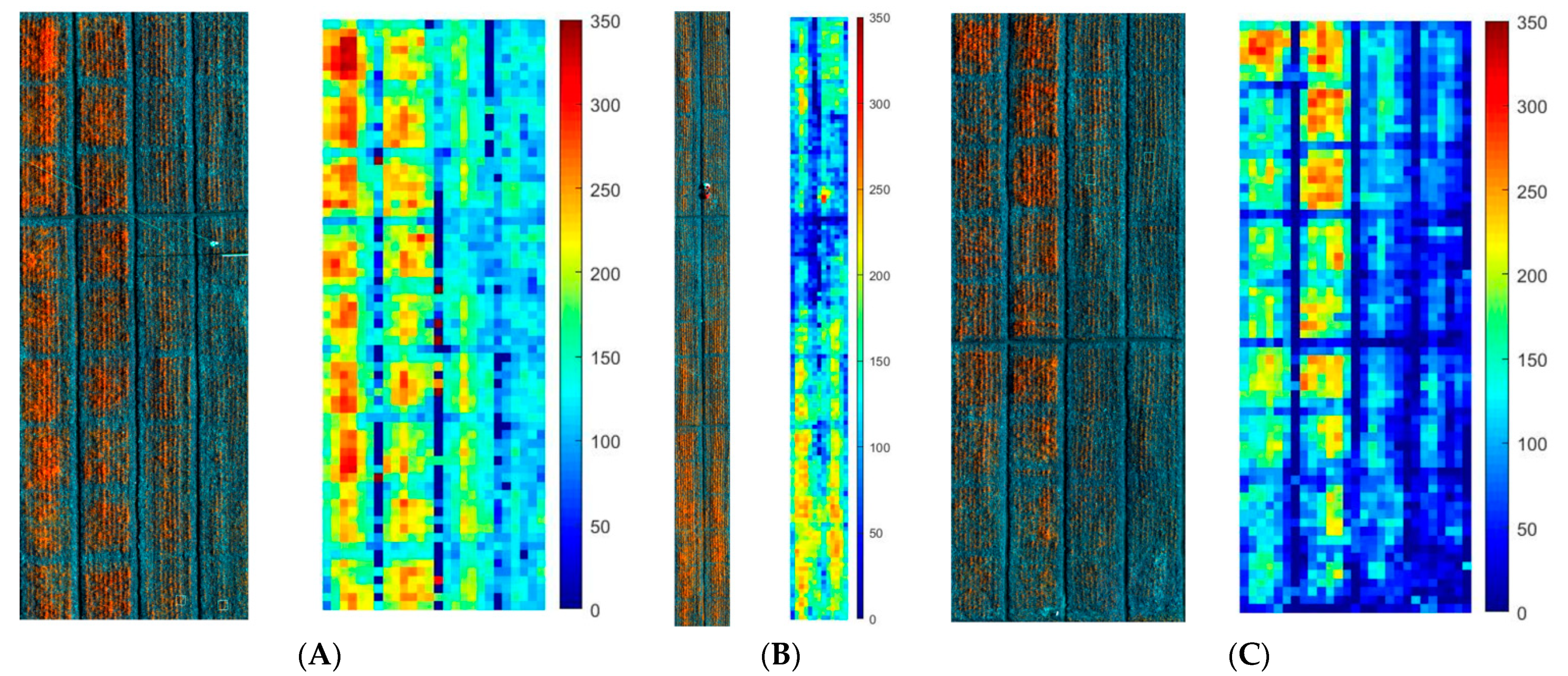
3.2. Estimation of Wheat Tiller Number in the Whole Field
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Slafer, G.A.; Elia, M.; Savin, R.; García, G.A.; Terrile, I.I.; Ferrante, A.; Miralles, D.J.; González, F.G. Fruiting efficiency: An alternative trait to further rise wheat yield. Food Energy Secur. 2015, 4, 92–109. [Google Scholar] [CrossRef]
- Wang, H.; Sun, S.; Ge, W.; Zhao, L.; Kong, L. Horizontal gene transfer of Fhb7 from fungus underlies Fusarium head blight resistance in wheat. Science 2020, 368, 822–823. [Google Scholar] [CrossRef] [PubMed]
- Jochem, B.E.; Jan, V.; Bruno, A.; Paul, C.S. Cessation of Tillering in Spring Wheat in Relation to Light Interception and Red: Far-red Ratio. Ann. Bot. 2006, 97, 649–658. [Google Scholar]
- Joseph, P.L.; Deirdre, D.; Shauna, M.; Fiona, M.; Quentin, D.; Lisa, C.B.; Ethel, M.W.; John, S. The impact of variation in grain number and individual grain weight on winter wheat yield in the high yield potential environment of Ireland. Eur. J. Agron. 2017, 87, 40–49. [Google Scholar]
- Elhani, S.; Martos, V.; Rharrabti, Y.; Royo, C.; Moral, L. Contribution of main stem and tillers to durum wheat (Triticum turgidum L. var. durum) grain yield and its components grown in Mediterranean environments. Field Crop. Res. 2007, 103, 25–35. [Google Scholar] [CrossRef]
- Engstr, M.L.; Bergkvist, G. Effects of three N strategies on tillering and yield of low shoot density winter wheat. Acta Agric. Scand. 2009, 59, 536–543. [Google Scholar]
- Darwinkel, A. Pattern of tillering and grain production of winter wheat at a wide range of plant densities. Neth. J. Agr. Sci. 1978, 26, 383–398. [Google Scholar] [CrossRef]
- Liu, J.; Zheng, C.; Li, Y.; Li, Z.; Fu, H.; Zhang, W. Rapid Diagnosis Technology of Wheat Stem Number Based on Canopy Image Processing. J. Henan Agric. Sci. 2019, 48, 174–180. [Google Scholar]
- Wu, J.; Yue, S.; Hou, P.; Meng, Q.; Cui, Z.; Li, F.; Chen, X. Monitoring Winter Wheat Population Dynamics Using an Active Crop Sensor. Spectrosc. Spect. Anal. 2011, 31, 535–538. [Google Scholar]
- Shan, C.; Liao, S.; Liang, Z.; Zhu, H.; Zheng, L. Study on Machine Recognition Methods for Population Feature of Wheat Images—Estimate of Wheat Population Total Stem Number. Acta Agron. Sin. 2004, 30, 1281–1283. [Google Scholar]
- Li, Q.; Gao, Y.; Weng, Y. An Automatic Detection Method for Tiller Number of Wheat Based on RGB Image. Patent CN201711395655.3, 23 June 2020. [Google Scholar]
- Flowers, M.; Weisz, R.; Heiniger, R. Remote Sensing of Winter Wheat Tiller Density for Early Nitrogen Application Decisions. Agron. J. 2001, 93, 783. [Google Scholar] [CrossRef]
- Phillips, S.B.; Keahey, D.A.; Warren, J.G.; Mullins, G.L. Estimating Winter Wheat Tiller Density Using Spectral Reflectance Sensors for Early-Spring, Variable-Rate Nitrogen Applications. Agron. J. 2004, 96, 591–600. [Google Scholar] [CrossRef]
- Fang, Y.; Qiu, X.; Guo, T.; Wang, Y.; Gui, L. An automatic method for counting wheat tiller number in the field with terrestrial LiDAR. Plant Methods 2020, 16, 132. [Google Scholar] [CrossRef]
- Boyle, R.D.; Corke, F.M.K.; Doonan, J.H. Automated estimation of tiller number in wheat by ribbon detection. Mach. Vision Appl. 2016, 27, 637–646. [Google Scholar] [CrossRef]
- Scotford, I.M.; Miller, P. Estimating Tiller Density and Leaf Area Index of Winter Wheat using Spectral Reflectance and Ultrasonic Sensing Techniques. Biosyst. Eng. 2004, 89, 395–408. [Google Scholar] [CrossRef]
- George, E.M.; João, C.N. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agr. 2008, 63, 282–293. [Google Scholar]
- Jannie, O.; Jacob, W. The influence of Triticum aestivum density, sowing pattern and nitrogen fertilization on leaf area index and its spatial variation. Basic Appl. Ecol. 2006, 8, 252–257. [Google Scholar]
- Calera, A.; Martínez, C.; Melia, J. A procedure for obtaining green plant cover: Relation to NDVI in a case study for barley. Int. J. Remote Sens. 2001, 22, 3357–3362. [Google Scholar] [CrossRef]
- Walsh, O.S.; Torrion, J.A.; Liang, X.; Shafian, S.; Mcclintick-Chess, J.R. Grain yield, quality, and spectral characteristics of wheat grown under varied nitrogen and irrigation. Agrosyst. Geosci. Environ. 2020, 3, 1. [Google Scholar] [CrossRef]
- Cohen, J.; Cohen, P.; West, S.G.; Aiken, L.S. Applied Multiple Regression/Correlation Analysis for the Behavioral Sciences; Taylor and Francis: Abingdon, UK, 2013. [Google Scholar]
- Darvishzadeh, R.; Atzberger, C.; Skidmore, A.K.; Abkar, A.A. Leaf Area Index derivation from hyperspectral vegetation indicesand the red edge position. Int. J. Remote Sens. 2009, 30, 6199–6218. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Baret, F.; Andrieu, B.; Burger, P.; Hemmerlé, M. Estimation of Wheat Plant Density at Early Stages Using High Resolution Imagery. Front. Plant Sci. 2017, 8, 739. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, N.; Yang, W.; Duan, L.; Xu, X.; Huang, C.; Liu, Q. Acceleration of CT reconstruction for wheat tiller inspection based on adaptive minimum enclosing rectangle. Comput. Electron. Agric. 2012, 85, 123–133. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Varieties | Nitrogen Fertilizer | Density | Replicates |
|---|---|---|---|---|
| 1 | Zhenmai12 (P1) | 0 kg/ha (N1) | 150 × 104 ha−1 (M1) | 3 |
| 125 kg/ha (N2) | 225 × 104 ha−1 (M2) | |||
| 225 kg/ha (N3) | 300 × 104 ha−1 (M3) | |||
| 375 kg/ha (N4) | ||||
| 2 | Yangmai16 (P2) | 0 kg/ha (N1) | 150 × 104 ha−1 (M1) | 3 |
| 125 kg/ha (N2) | 225 × 104 ha−1 (M2) | |||
| 225 kg/ha (N3) | 300 × 104 ha−1 (M3) | |||
| 375 kg/ha (N4) | ||||
| 3 | Ningmai13 (P3) | 0 kg/ha (N1) | 150 × 104 ha−1 (M1) | 3 |
| 125 kg/ha (N2) | 225 × 104 ha−1 (M2) | |||
| 225 kg/ha (N3) | 300 × 104 ha−1 (M3) | |||
| 375 kg/ha (N4) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, F.; Wang, J.; Zhou, Y.; Song, X.; Ju, C.; Sun, C.; Liu, T. Estimation of Winter Wheat Tiller Number Based on Optimization of Gradient Vegetation Characteristics. Remote Sens. 2022, 14, 1338. https://doi.org/10.3390/rs14061338
Wu F, Wang J, Zhou Y, Song X, Ju C, Sun C, Liu T. Estimation of Winter Wheat Tiller Number Based on Optimization of Gradient Vegetation Characteristics. Remote Sensing. 2022; 14(6):1338. https://doi.org/10.3390/rs14061338
Chicago/Turabian StyleWu, Fei, Junchan Wang, Yuzhuang Zhou, Xiaoxin Song, Chengxin Ju, Chengming Sun, and Tao Liu. 2022. "Estimation of Winter Wheat Tiller Number Based on Optimization of Gradient Vegetation Characteristics" Remote Sensing 14, no. 6: 1338. https://doi.org/10.3390/rs14061338
APA StyleWu, F., Wang, J., Zhou, Y., Song, X., Ju, C., Sun, C., & Liu, T. (2022). Estimation of Winter Wheat Tiller Number Based on Optimization of Gradient Vegetation Characteristics. Remote Sensing, 14(6), 1338. https://doi.org/10.3390/rs14061338