
A Comparison of the Performances of Unmanned-Aerial-Vehicle (UAV) and Terrestrial Laser Scanning for Forest Plot Canopy Cover Estimation in Pinus massoniana Forests


 ,
,
Abstract
:1. Introduction
2. Study Area and Materials
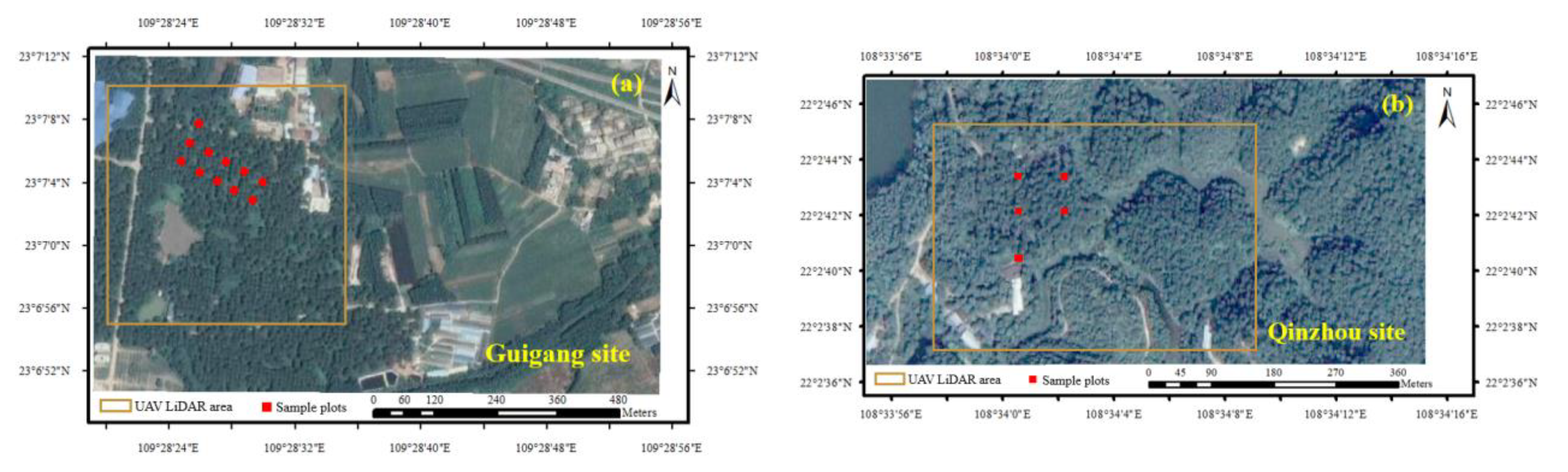
2.1. Study Area
2.2. LiDAR Data Collection
2.2.1. UAV Laser Scanning Data
2.2.2. Terrestrial Laser Scanning Data
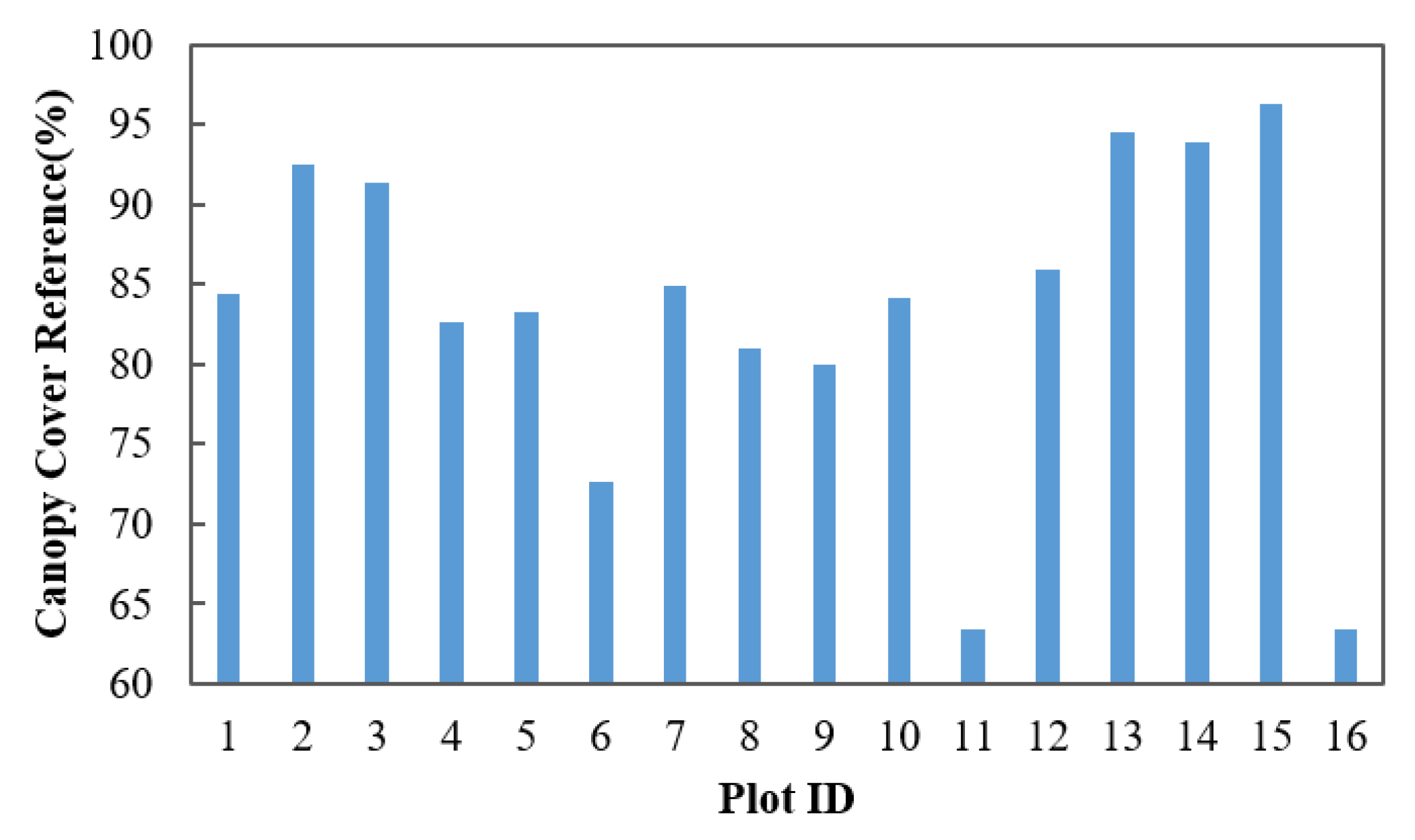
2.3. Establishment of Reference Data
3. Methods
3.1. Canopy Cover Estimation Using CHM-Based Method
3.2. Canopy Cover Estimation Using ITD-Based Method
3.3. Comparison Scheme and Accuracy Assessment
4. Results
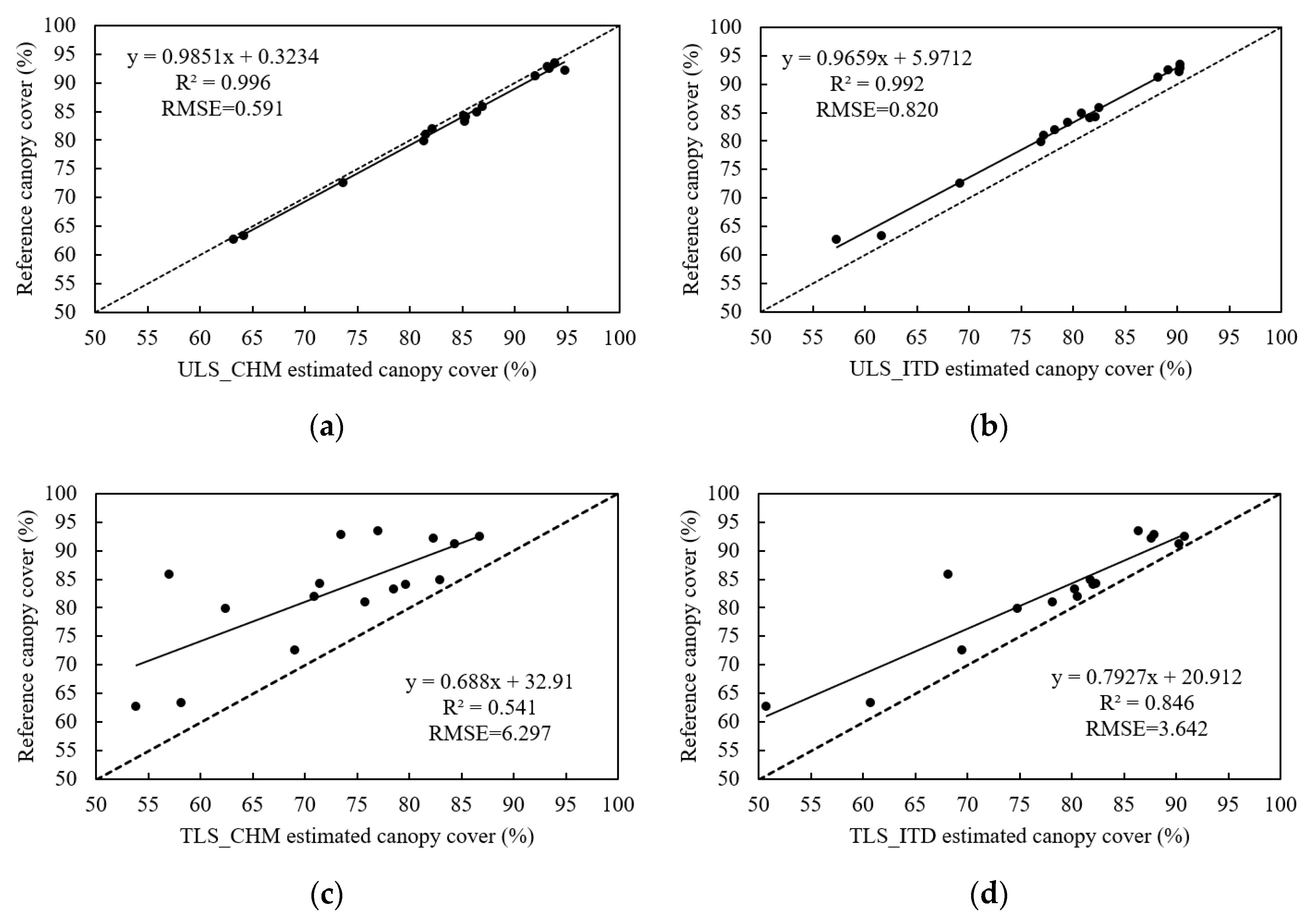
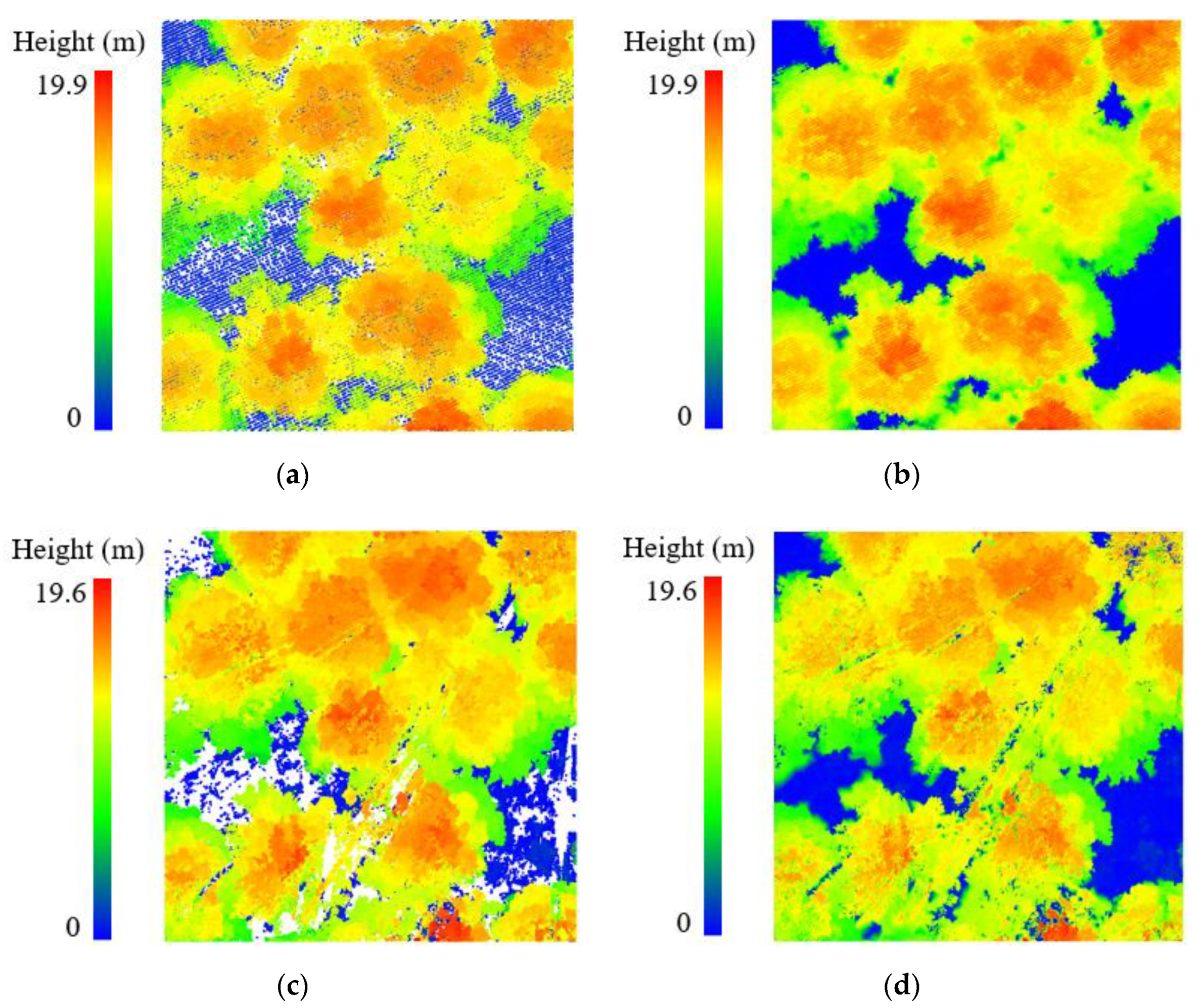
4.1. Comparison of LiDAR Estimations and Reference
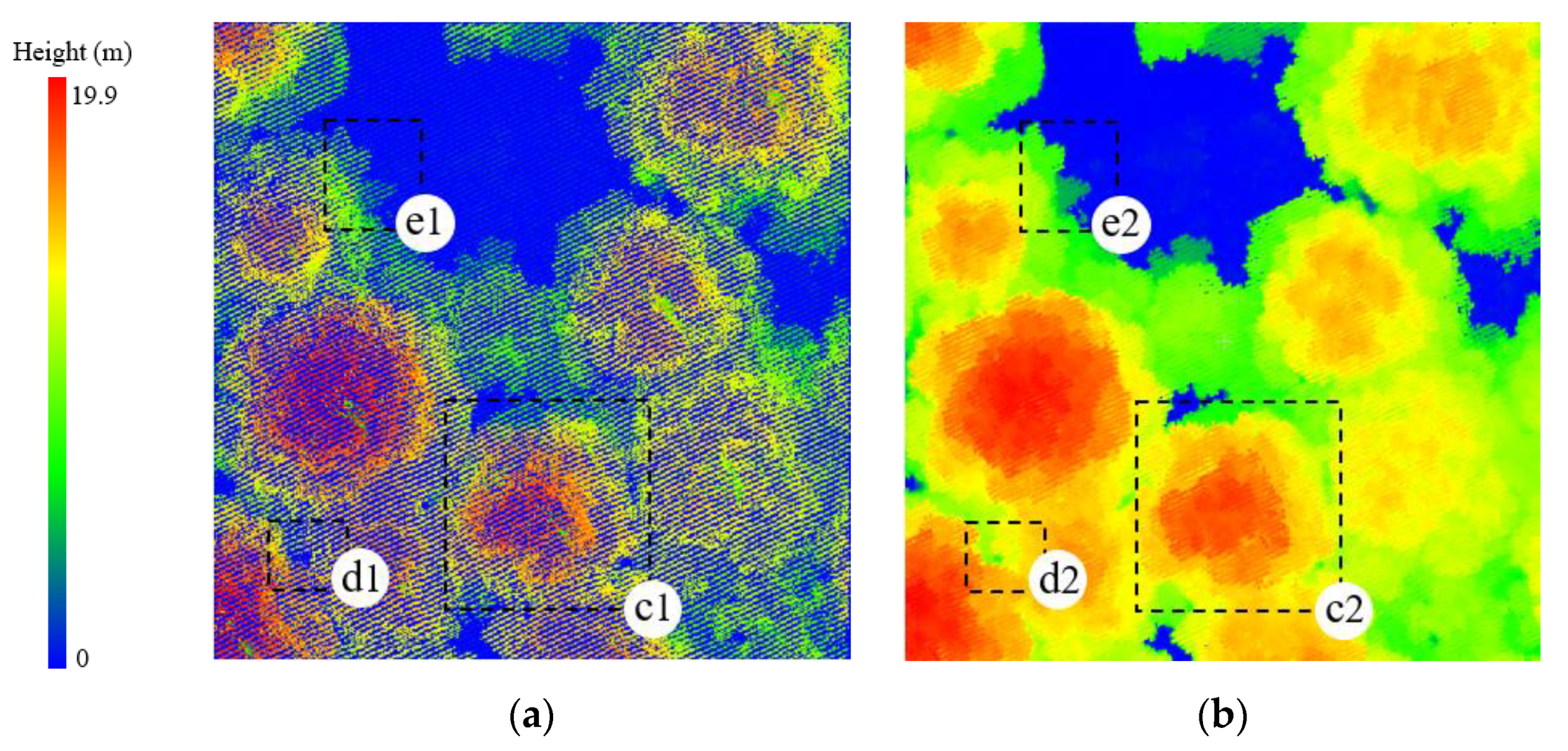
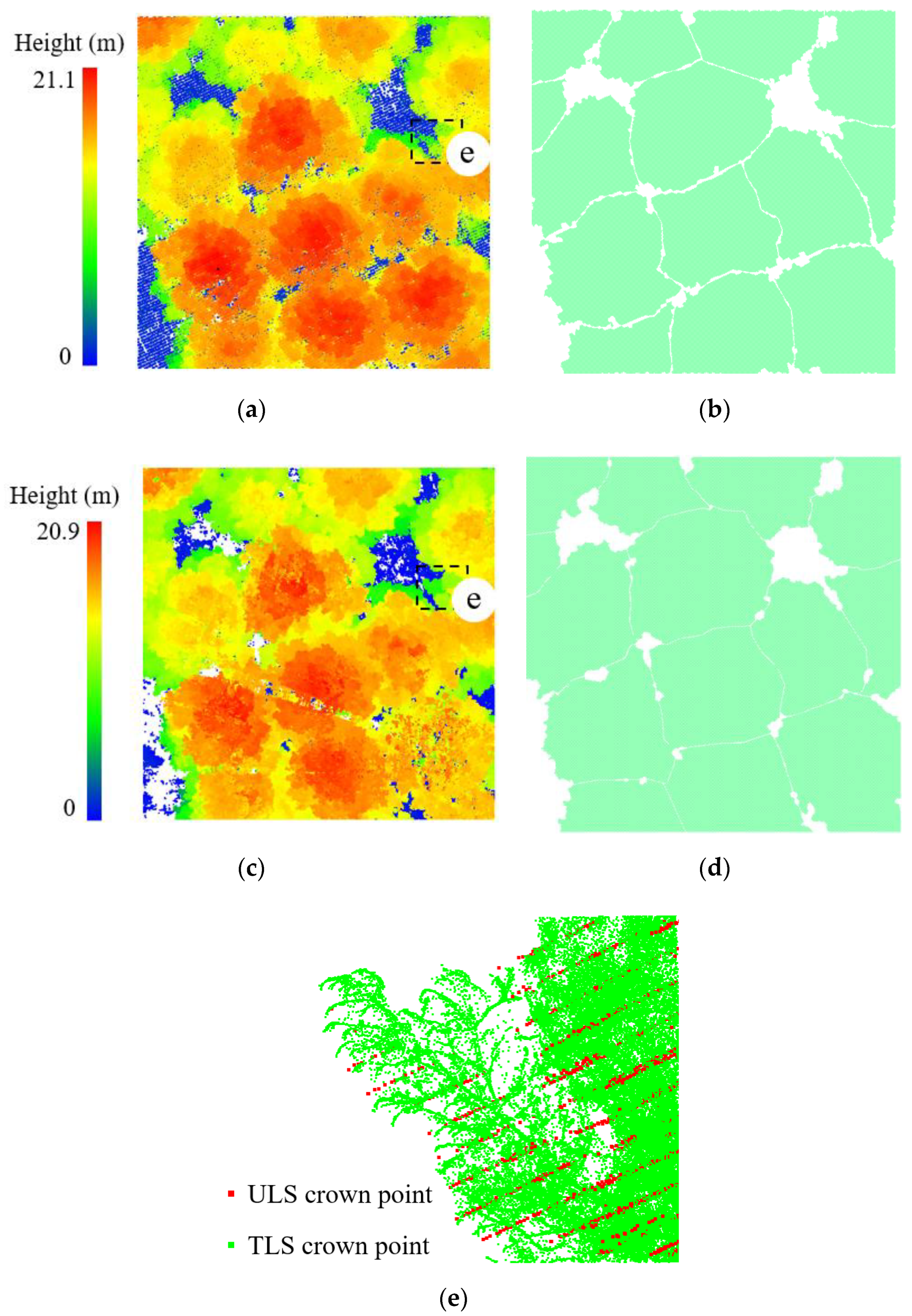
4.2. The Agreement and Disagreement in the Estimations from ULS and TLS
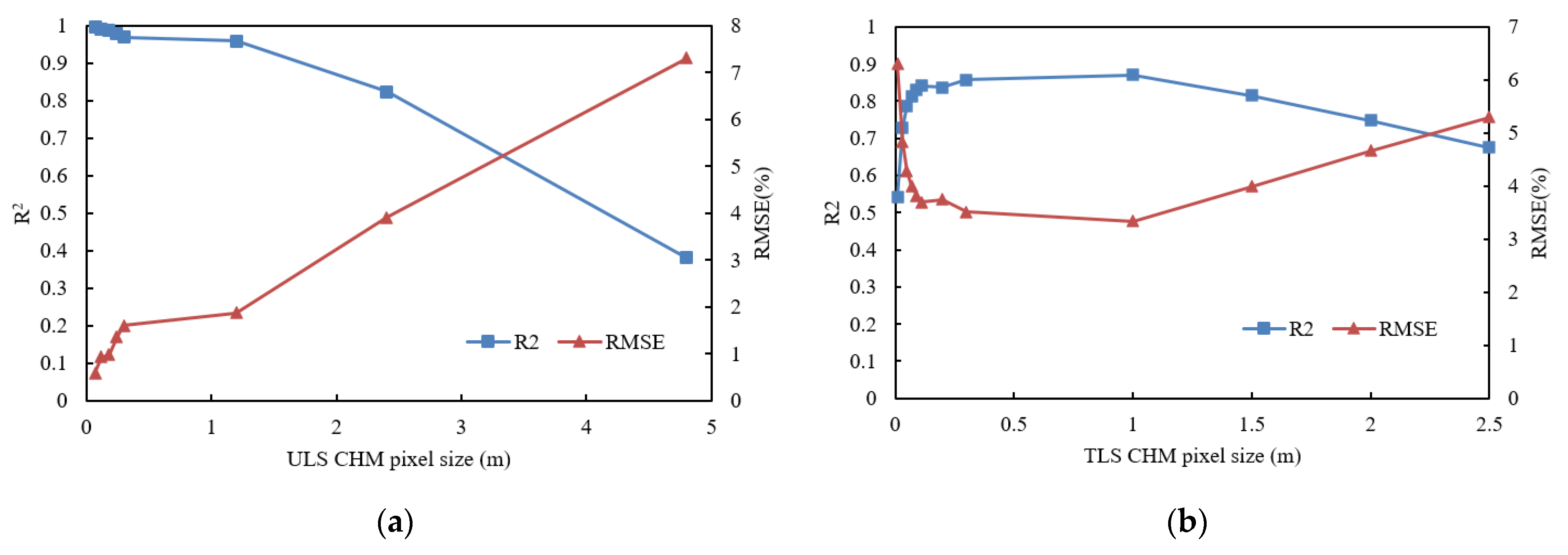
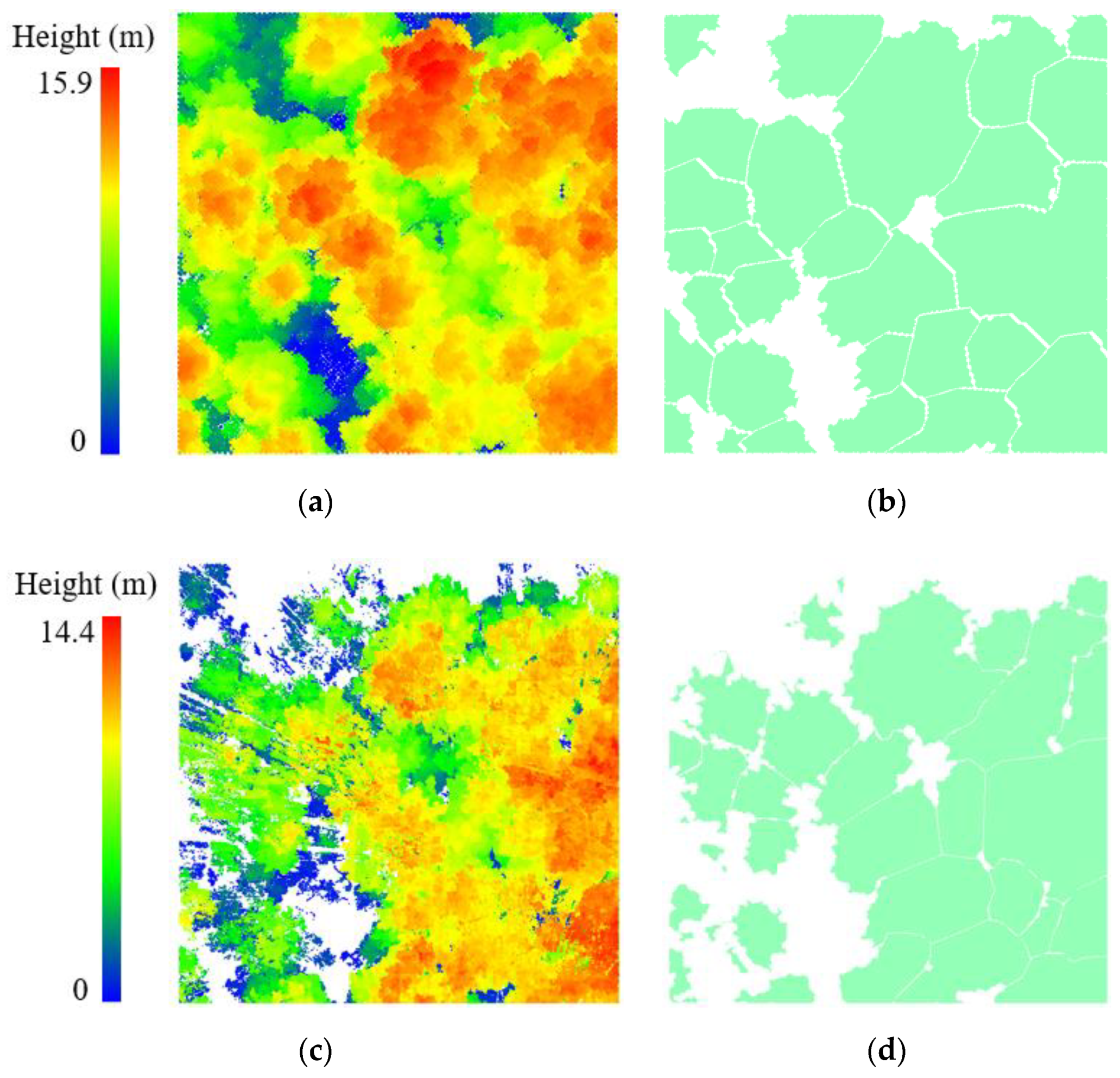
4.3. Estimation Results of CHM-Based Canopy Cover with Different Pixel Size
5. Discussion
5.1. Differences between LiDAR-Derived Canopy Cover and Reference Data
5.2. Difference between ULS-Derived and TLS-Derived Canopy Cover Estimations
5.3. Effect of Pixel Size on the CHM-Based Canopy Cover Estimation Accuracy
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jennings, S.B.; Brown, N.D.; Sheil, D. Assessing forest canopies and understorey illumination: Canopy closure, canopy cover and other measures. Forestry 1999, 72, 59–74. [Google Scholar] [CrossRef]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- FAO. On Definitions of Forest and Forest Change. Forest Resources Assessment Programme; Working Paper; FAO: Rome, Italy, 2000; Volume 33, p. 15. [Google Scholar]
- Gill, S.J.; Biging, G.S.; Murphy, E.C. 2000. Modeling conifer tree crown radius and estimating canopy cover. For. Ecol. Manag. 2000, 126, 405–416. [Google Scholar] [CrossRef] [Green Version]
- Korhonen, L.; Korhonen, K.T.; Rautiainen, M.; Stenberg, P. Estimation of forest canopy cover: A comparison of field measurement techniques. Silva Fenn. 2006, 40, 577–588. [Google Scholar] [CrossRef] [Green Version]
- Fiala, A.C.; Garman, S.L.; Gray, A.N. Comparison of five canopy cover estimation techniques in the western Oregon Cascades. For. Ecol. Manag. 2006, 232, 188–197. [Google Scholar] [CrossRef]
- Chopping, M.; Moisen, G.G.; Su, L.; Lalibrete, A.; Rango, A.; Martonchik, J.; Peter, D.P.C. Large area mapping of southwestern forest crown cover, canopy height, and biomass using the NASA Multiangle Imaging Spectro-Radiometer. Remote Sens. Environ. 2008, 112, 2051–2063. [Google Scholar] [CrossRef] [Green Version]
- Miller, J.D.; Knapp, E.E.; Key, C.H.; Skinner, C.N.; Isbell, C.J.; Creasy, R.M.; Sherlock, J.W. Calibration and validation of the relative differenced Normalized Burn Ratio (RdNBR) to three measures of fire severity in the Sierra Nevada and Klamath Mountains, California, USA. Remote Sens. Environ. 2009, 113, 645–656. [Google Scholar] [CrossRef]
- Ganey, J.L.; Cassidy, R.H.; Block, W.M. Estimating Canopy Cover in Forest Stands Used by Mexican Spotted owls: Do Stand-Exam Routines Provide Estimates Comparable to Field-Based Techniques? Res. Pap. RMRS-RP-72WWW; US Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2008; Volume 8, p. 72.
- Smart, L.; Swenson, J.; Christensen, N.; Sexton, J. Three-dimensional characterization of pine forest type and red-cockaded woodpecker habitat by small-footprint, discrete-return lidar. For. Ecol. Manag. 2012, 281, 100–110. [Google Scholar] [CrossRef]
- Rautiainen, M.; Stenberg, P.; Nilson, T. Estimating canopy cover in Scots pine stands. Silva Fenn. 2005, 39, 137–142. [Google Scholar] [CrossRef] [Green Version]
- Williams, M.S.; Patterson, P.L.; Mowrer, H.T. Comparison of ground sampling methods for estimating canopy cover. For. Sci. 2003, 49, 235–246. [Google Scholar]
- Korhonen, L.; Heikkinen, J. Automated analysis of in situ canopy images for the estimation of forest canopy cover. For. Sci. 2009, 55, 323–334. [Google Scholar]
- Santopuoli, G.; di Cristofaro, M.; Kraus, D.; Schuck, A.; Lasserre, B.; Marchetti, M. Biodiversity conservation and wood production in a Natura 2000 Mediterranean forest. A trade-off evaluation focused on the occurrence of microhabitats. IForest 2019, 12, 76. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Wang, Y.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Honkavaara, E.; Liu, J. Forest data collection using terrestrial image-based point clouds from a handheld camera compared to terrestrial and personal laser scanning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5117–5132. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Schneider, F.D.; Kükenbrink, D.; Schaepman, M.E.; Schimel, D.S.; Morsdorf, F. Quantifying 3D structure and occlusion in dense tropical and temperate forests using close-range LiDAR. Agric. For. Meteorol. 2019, 268, 249–257. [Google Scholar] [CrossRef]
- Smith, A.M.S.; Falkowski, M.J.; Hudak, A.T.; Evans, J.S.; Robinson, A.P.; Steele, C.M. A cross-comparison of field, spectral and lidar estimates of forest canopy cover. Can. J. Remote Sens. 2009, 35, 447–459. [Google Scholar] [CrossRef]
- Wu, X.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Assessment of individual tree detection and canopy cover estimation using unmanned aerial vehicle based light detection and ranging (UAV-LiDAR) data in planted forests. Remote Sens. 2019, 11, 908. [Google Scholar] [CrossRef] [Green Version]
- Lee, A.C.; Lucas, R.M. A LiDAR-derived canopy density model for tree stem and crown mapping in Australian forests. Remote Sens. Environ. 2007, 111, 493–518. [Google Scholar] [CrossRef]
- Ma, Q.; Su, Y.; Guo, Q. Comparison of canopy cover estimations from airborne LiDAR, aerial imagery, and satellite imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4225–4236. [Google Scholar]
- Liu, Q.; Fu, L.; Wang, G.; Li, S.; Li, Z.; Chen, E.; Pang, Y.; Hu, K. Improving estimation of forest canopy cover by introducing loss ratio of laser pulses using airborne LiDAR. IEEE Trans. Geosci. Remote Sens. 2019, 58, 567–585. [Google Scholar] [CrossRef]
- Holmgren, J.; Johansson, F.; Olofsson, K.; Olsson, H.; Glimskär, A. Estimation of Crown Coverage Using Airborne Laser Scanning, 8th ed.; SilviLaser 2008 Organizing Committee: Bournemouth, UK, 2008. [Google Scholar]
- Melin, M.; Korhonen, L.; Kukkonen, M.; Packalen, P. Assessing the performance of aerial image point cloud and spectral metrics in predicting boreal forest canopy cover. ISPRS J. Photogramm. Remote Sens. 2017, 129, 77–85. [Google Scholar] [CrossRef]
- Danson, F.M.; Hetherington, D.; Morsdorf, F.; Koetz, B.; Allgower, B. Forest canopy gap fraction from terrestrial laser scanning. IEEE Geosci. Remote Sens. Lett. 2007, 4, 157–160. [Google Scholar] [CrossRef] [Green Version]
- Seidel, D.; Fleck, S.; Leuschner, C. Analyzing forest canopies with ground-based laser scanning: A comparison with hemispherical photography. Agric. For. Meteorol. 2012, 154, 1–8. [Google Scholar] [CrossRef]
- Cifuentes, R.; Van der Zande, D.; Farifteh, J.; Salas, C.; Coppin, P. Effects of voxel size and sampling setup on the estimation of forest canopy gap fraction from terrestrial laser scanning data. Agric. For. Meteorol. 2014, 194, 230–240. [Google Scholar] [CrossRef]
- Korhonen, L.; Kaartinen, H.; Kukko, A.; Solberg, S.; Astrup, R. Estimating vertical canopy cover with terrestrial and airborne laser scanning. In Proceedings of the 10th international conference on LiDAR applications for assessing forest ecosystems (Silvilaser 2010), Freiburg, Germany, 14–17 September 2010. [Google Scholar]
- Li, J.; Yang, B.; Cong, Y.; Cao, L.; Fu, X.; Dong, Z. 3D forest mapping using a low-cost UAV laser scanning system: Investigation and comparison. Remote Sens. 2019, 11, 717. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using uav-lidar data in ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef] [PubMed]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing uav laser scanning with terrestrial lidar. Remote Sens. Environ. 2019, 233, 111355. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Pyörälä, J.; Lehtomäki, M.; Yu, X.; Kaartinen, H.; Kukko, E.H.; Issaoui, A.E.I.; Nevalainen, O.; Vaaja, M.; et al. Forest in situ observations using unmanned aerial vehicle as an alternative of terrestrial measurements. For. Ecosyst. 2019, 6, 20. [Google Scholar] [CrossRef] [Green Version]
- Hillman, S.; Wallace, L.; Lucieer, A.; Reinke, K.; Turner, D.; Jones, S. A comparison of terrestrial and UAS sensors for measuring fuel hazard in a dry sclerophyll forest. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102261. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Puliti, S.; Dash, J.P.; Watt, M.S.; Breidenbach, J.; Pearse, G.D. A comparison of UAV laser scanning, photogrammetry and airborne laser scanning for precision inventory of small-forest properties. Forestry 2020, 93, 150–162. [Google Scholar] [CrossRef]
- Cai, S.; Zhang, W.; Liang, X.; Wan, P.; Qi, J.; Yu, S.; Shao, J. Filtering airborne LiDAR data through complementary cloth simulation and progressive TIN densification filters. Remote Sens. 2019, 11, 1037. [Google Scholar] [CrossRef] [Green Version]
- Cai, S.; Zhang, W.; Jin, S.; Shao, J.; Li, L.; Yu, S.; Yan, G. Improving the estimation of canopy cover from UAV-LiDAR data using a pit-free CHM-based method. Int. J. Digit. Earth 2021, 14, 1477–1492. [Google Scholar] [CrossRef]
- Zhao, D.; Pang, Y.; Li, Z.; Sun, G. Filling invalid values in a LiDAR-derived canopy height model with morphological crown control. Int. J. Remote Sens. 2013, 34, 4636–4654. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| All Plots | GG Plots | QZ Plots | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Min | Max | |Mean| | Min | Max | |Mean| | Min | Max | |Mean| | ||
| ULS | CHM-based | 0.07 | 2.50 | 0.93 | 0.07 | 1.90 | 0.93 | 0.33 | 2.50 | 0.92 |
| ITD-based | −5.47 | −1.75 | 3.26 | −4.15 | −1.75 | 3.22 | −5.47 | −2.13 | 3.34 | |
| Mean | 2.10 | 2.08 | 2.13 | |||||||
| TLS | CHM-based | −28.94 | −2.03 | 10.22 | −17.58 | −2.03 | 7.27 | −28.94 | −8.96 | 16.73 |
| ITD-based | −17.75 | −1.06 | 4.69 | −5.18 | −1.06 | 2.59 | −17.75 | −4.70 | 9.32 | |
| Mean | 7.46 | 4.93 | 13.03 | |||||||
| All Plots | GG Plots | QZ Plots | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Min | Max | |Mean| | Min | Max | |Mean| | Min | Max | |Mean| | |
| ULS_CHM-TLS_CHM | 3.45 | 29.91 | 11.15 | 3.45 | 18.89 | 8.19 | 9.36 | 29.91 | 17.65 |
| ULS_ITD-TLS_ITD | −2.33 | 14.34 | 2.67 | −2.33 | 2.07 | 1.17 | 2.39 | 14.34 | 5.97 |
| mean | 6.91 | 4.68 | 11.81 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, W.; Guan, Q.; Cai, S.; Liu, R.; Chen, R.; Liu, Q.; Chen, C.; Dong, Z. A Comparison of the Performances of Unmanned-Aerial-Vehicle (UAV) and Terrestrial Laser Scanning for Forest Plot Canopy Cover Estimation in Pinus massoniana Forests. Remote Sens. 2022, 14, 1188. https://doi.org/10.3390/rs14051188
Dai W, Guan Q, Cai S, Liu R, Chen R, Liu Q, Chen C, Dong Z. A Comparison of the Performances of Unmanned-Aerial-Vehicle (UAV) and Terrestrial Laser Scanning for Forest Plot Canopy Cover Estimation in Pinus massoniana Forests. Remote Sensing. 2022; 14(5):1188. https://doi.org/10.3390/rs14051188
Chicago/Turabian StyleDai, Wenxia, Qingfeng Guan, Shangshu Cai, Rundong Liu, Ruibo Chen, Qing Liu, Chao Chen, and Zhen Dong. 2022. "A Comparison of the Performances of Unmanned-Aerial-Vehicle (UAV) and Terrestrial Laser Scanning for Forest Plot Canopy Cover Estimation in Pinus massoniana Forests" Remote Sensing 14, no. 5: 1188. https://doi.org/10.3390/rs14051188
APA StyleDai, W., Guan, Q., Cai, S., Liu, R., Chen, R., Liu, Q., Chen, C., & Dong, Z. (2022). A Comparison of the Performances of Unmanned-Aerial-Vehicle (UAV) and Terrestrial Laser Scanning for Forest Plot Canopy Cover Estimation in Pinus massoniana Forests. Remote Sensing, 14(5), 1188. https://doi.org/10.3390/rs14051188