
Joint Estimation of Azimuth and Distance for Far-Field Multi Targets Based on Graph Signal Processing


Abstract
:1. Introduction
2. Model and Method
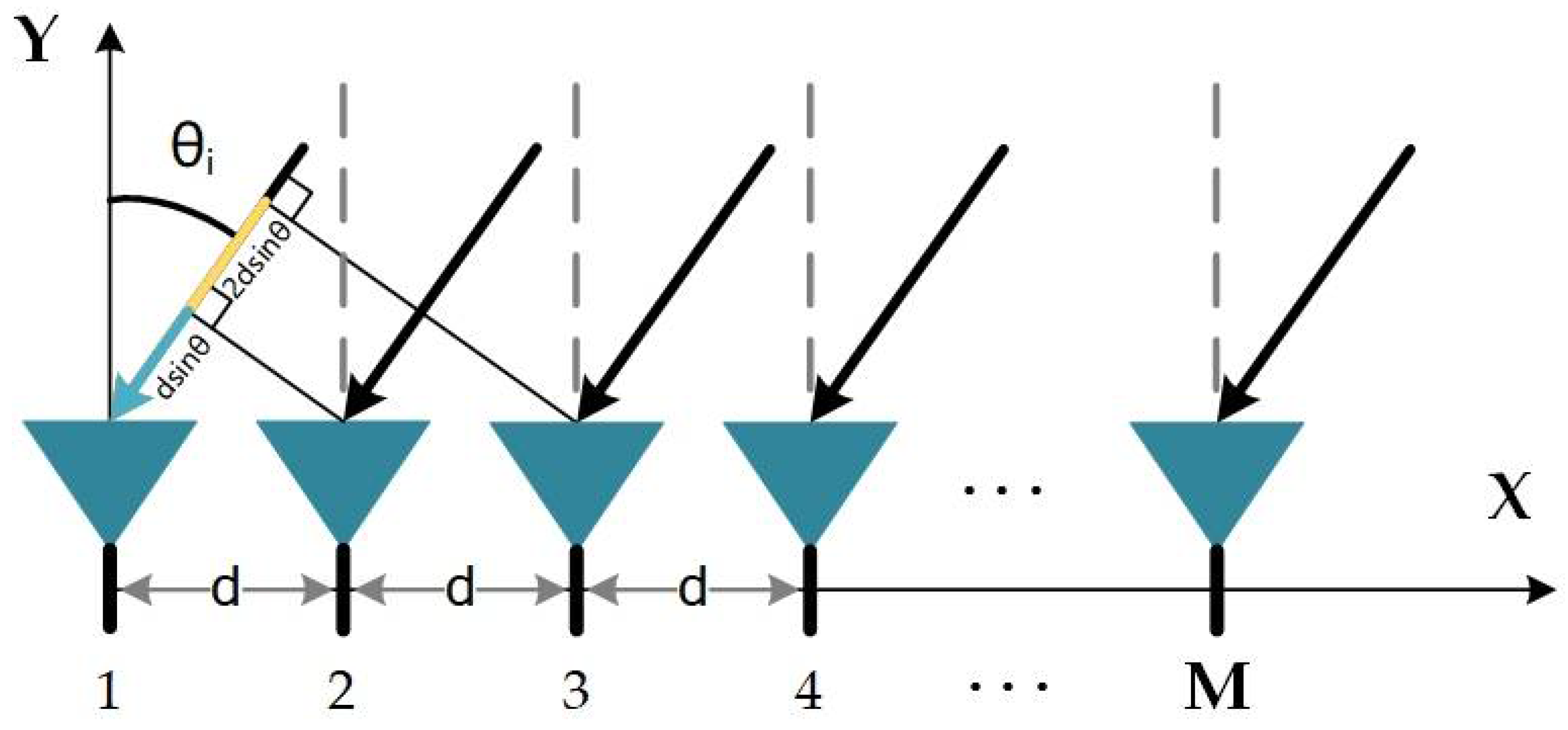
2.1. Array Signal Model
2.2. Discrete Analysis of Array Signal Model
- targets to be estimated in the search domain ;
- The number of antennas in the transmitting array ; the number of antennas in the receiving array ;
- is the vector form of the pulse signals of the transmitting array antenna; and is the snapshot time;
- are the value of the RCS scattering coefficient of the targets;
- and are the azimuth and distance estimates related both to the transmitting and receiving antenna arrays;
- is the steering vector of the transmitting antenna signal, and its size is ; is the steering vector of the receiving antenna signal, and its size is .
2.3. Echo Signal Covariance Matrix
2.4. Graph-Based Joint Estimation Method and Algorithm Derivation
2.4.1. Fully Connected Graph of Array Signal Model
2.4.2. Graph Signal Estimation Algorithm
- 1.
- Graph signal estimation principle
- 2.
- General solving algorithm of graph signal
- 3.
- Joint azimuth and distance Estimation algorithm
- according to Equation (8) to construct a narrowband transmitted pulse waveforms. Where is formed by is intercepted from the first columns of the Hadamard function, and represents the snapshot samples of the transmitted step frequency signal vector, where and .
- according to Equations (10) and (11) to construct a read received signal. In this article, for the convenience of calculation, is compressed into a vector form.
- in adjacency matrix is obtained by inversing calculation using Equation (27), by performing different inversion operations by distinguishing the three cases of the row number in adjacency matrix :where is the search domain corresponding to the -th target, and the expression is exactly the same as .
- is the reciprocal of the two-norm Fourier transform of with the largest eigenvalues removed, where according to Equation (32).
| Algorithm 1: General estimation solution of graph signal algorithm |
| Operation: For each , calculate . |
| Initialization: Transmit orthogonal signal vector according to (9). Transmit steering vector according to (8). Receive steering vector according to (7). Determine real received signal expression according to (10). |
| Iteration: (1) Adjacency matrix step according to (33). (2) Eigenvalue solving step according to (29). (3) Response function solving step: Sort the eigenvalues by and delete maximum eigenvalue. according to (32). |
| Algorithm 2: Various search domains of graph signal algorithm |
| Operation: For different estimation domain, calculate , or or based on Algorithm 1. |
| Iteration: Case a: Azimuth estimation search domain (1) Establish search domain , apply the Algorithm 1 to determine . Case b: Distance estimation search domain (1) Establish search domain apply the Algorithm 1 to determine . Case c: Joint estimation search domain (1) Establish search domain , apply the Algorithm 1 to determine . (2) Establish search domain apply the Algorithm 1 to determine . (3) |
2.4.3. CLEAN Algorithm for False Point Elimination
| Algorithm 3: Graph signal joint estimation CLEAN algorithm |
| Operation: For , eliminate the false point until equal to . |
| Initialization: Assign values to the initial “dirty” response map. (The map after iteration is , is the number of iterations). . |
| Iteration: (1) Find the largest point in the map and record its position information. , where Record the location of each iteration. Record the Point Spread Function searched each iteration through the parameters of . (2) Subtract the from the “dirty” graph. (3) If , terminate the algorithm; Otherwise, repeat step 2) and step 3). |
3. Simulations and Results
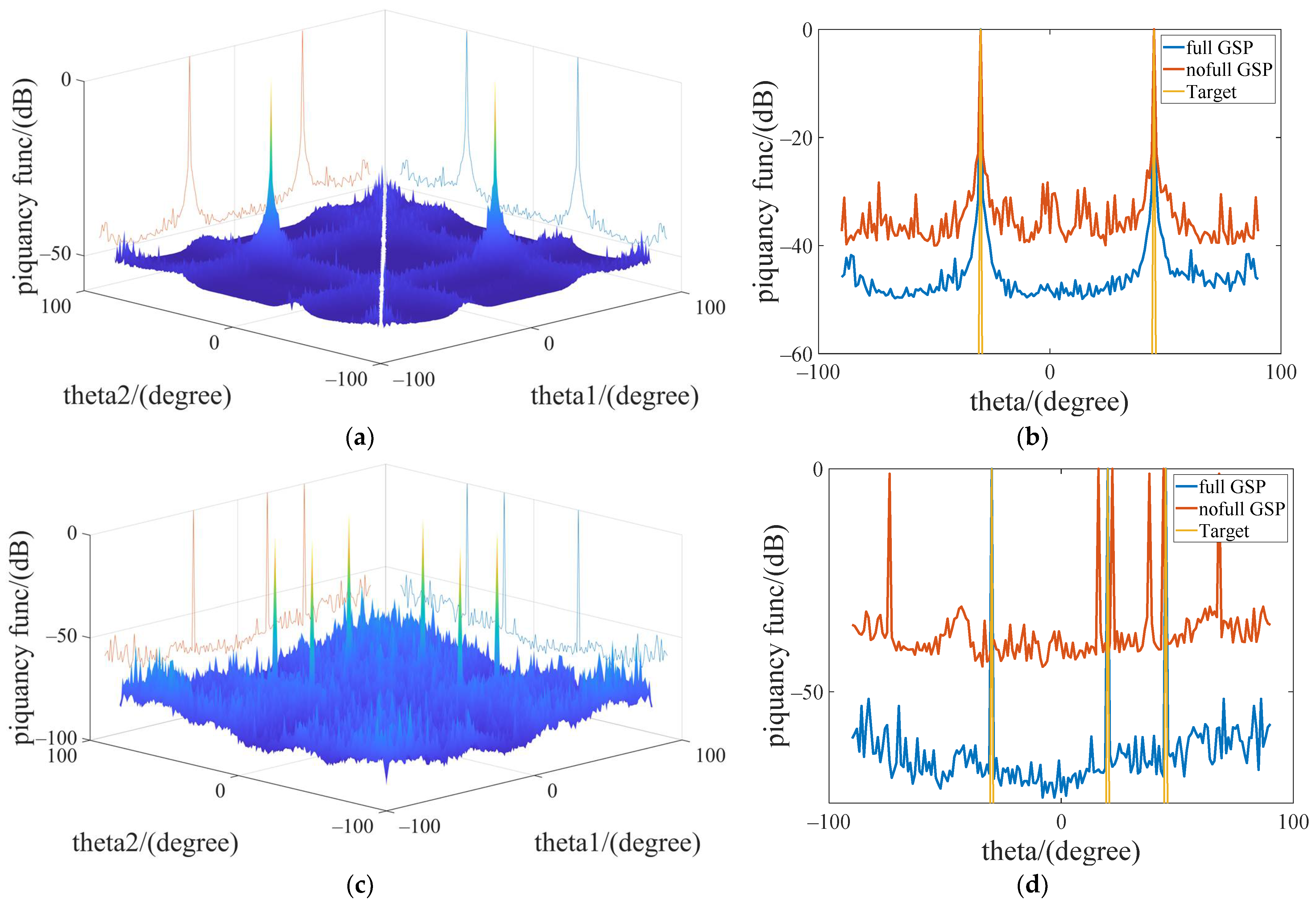
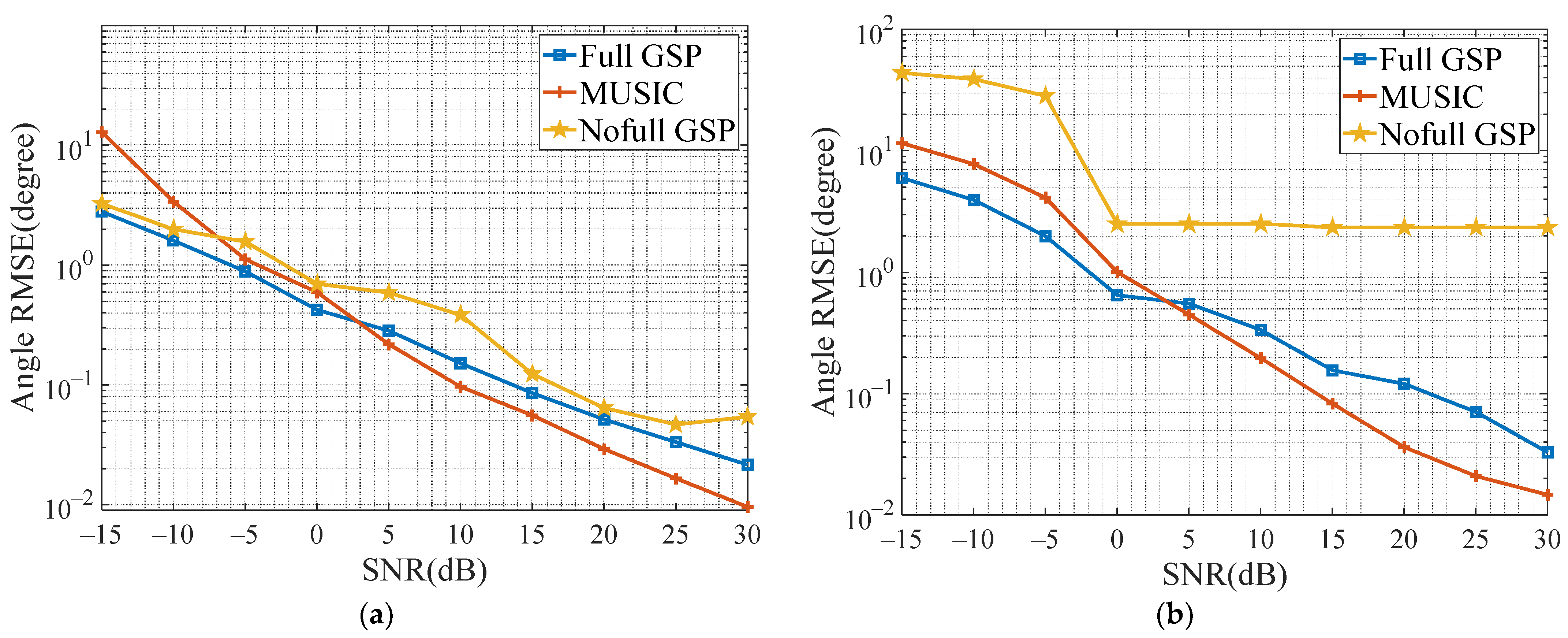
3.1. Azimuth Estimation Results and Monte Carlo Analysis
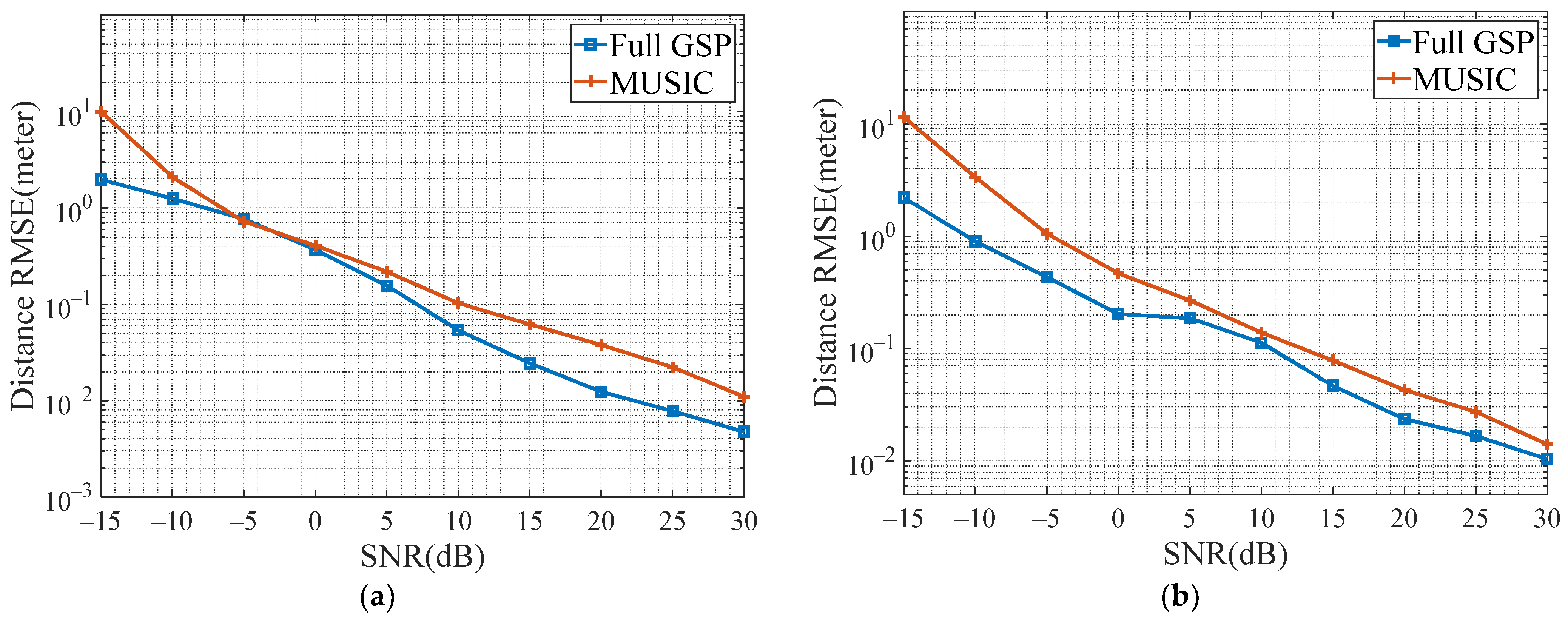
3.2. Distance Estimation Results and Monte Carlo Analysis
3.3. Joint Estimation Results
4. Discussion
4.1. Results and Performance Analysis of GSP Estimation Method
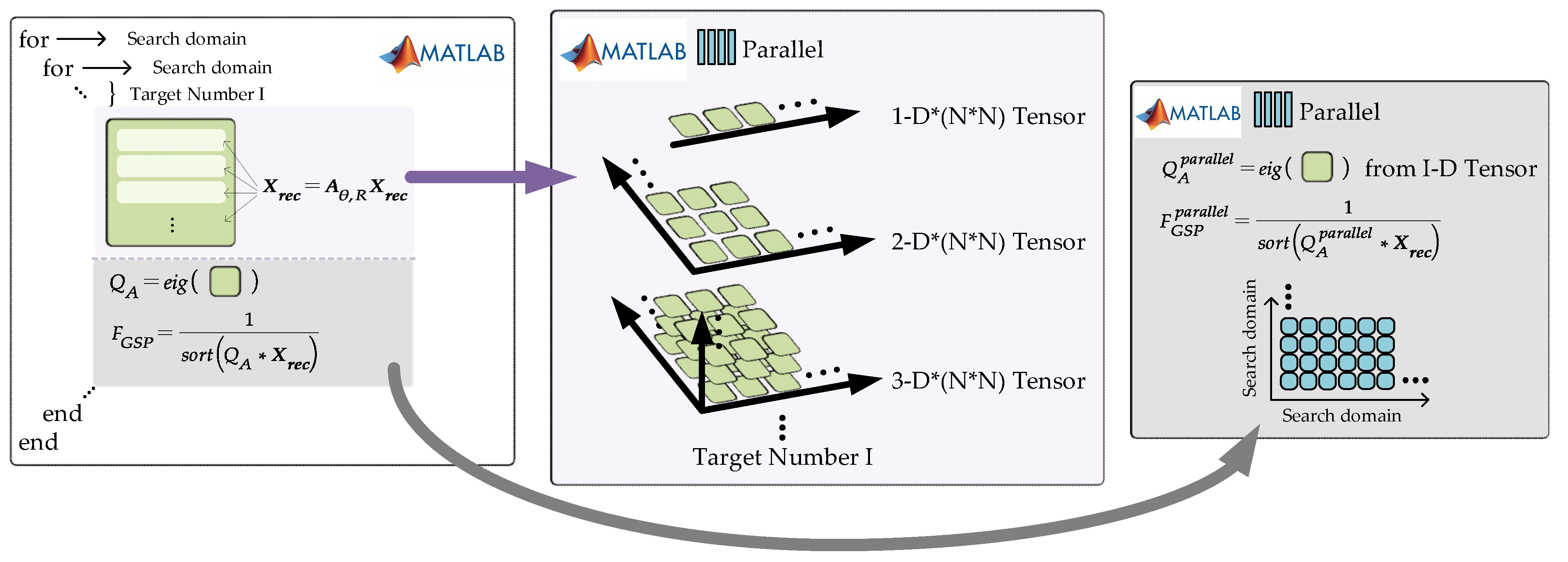
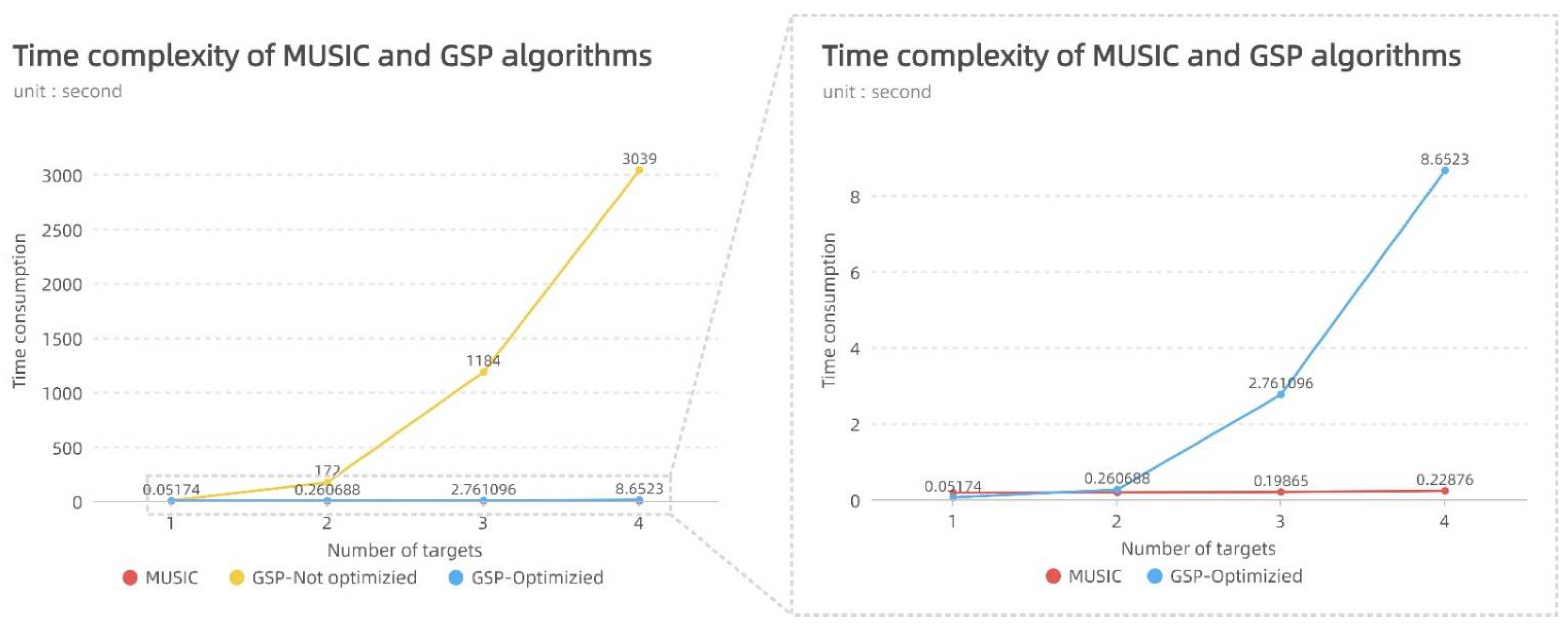
4.2. Analysis of Time Complexity and Computational Load
- (1)
- Computing the element of the adjacency matrix by the received signal is .
- (2)
- Computing the EVD of adjacency matrix is .
- (3)
- Sort , and delete the maximum value of the first items, then counting down to get the response value result is .
- (4)
- The above process is about the iteration of the -th power of the search domain , and its algorithm complexity is .
- (1)
- Computing the covariance matrix by the received signal is .
- (2)
- Computing the EVD of the covariance matrix is .
- (3)
- Sort , and delete the maximum value of the first items, solving the noise subspace and calculating the response value is .
- (4)
- The above process is about the iteration of search domain , and its algorithm complexity is .
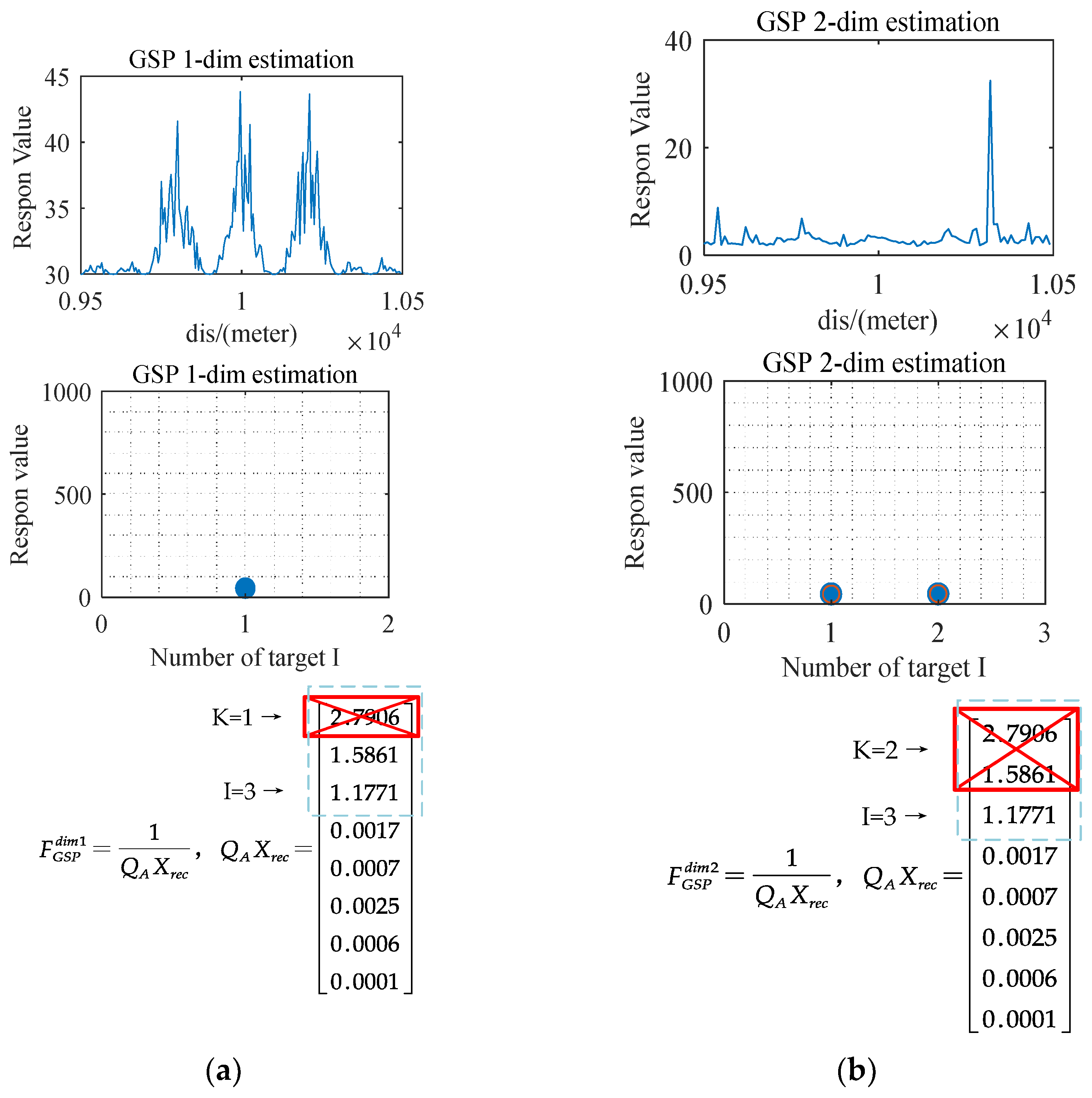
4.3. Estimation Method of Unknown Target Number K
- 1.
- When the estimates number , the search domain of GSP algorithm is , and function will not have sharp peaks and will cause confusion in the estimation results. As shown in Figure 13a,b, the response of the search result is very small. This is because even if the parameter of the search domain is aligned with any in the target , maximum eigenvalues will appear as long as . and deleting the eigenvalues of the first large numbers in will not make have a huge response value, so it is impossible to obtain accurate estimation when .
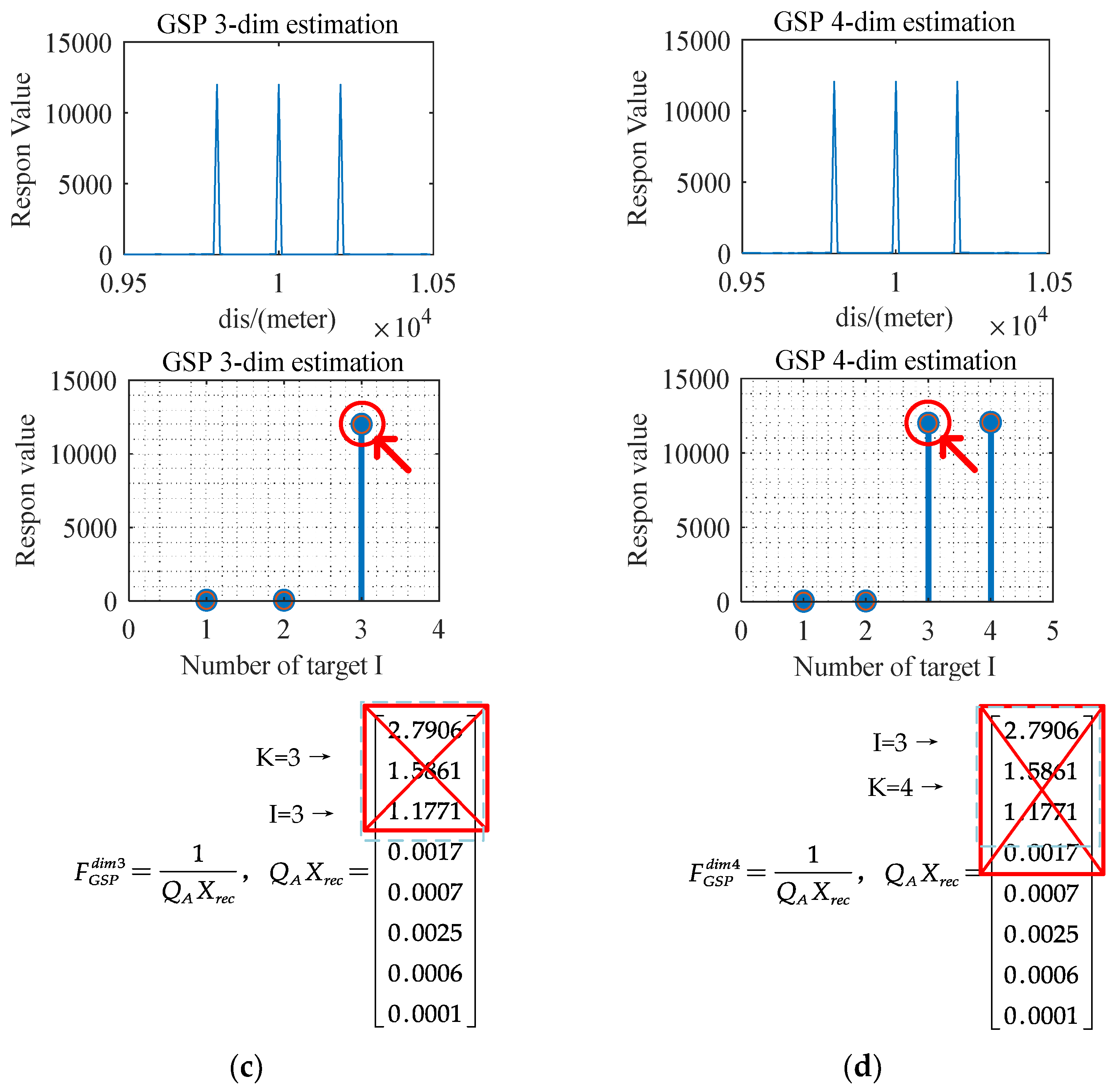
- 2.
- When the estimated number , the search domain of GSP algorithm is equal to , function will produce sharp peaks, and the size of each spike is greater than 10e4. At this time, it can be preliminarily determined that the estimated number of targets is . As shown in Figure 13c, the searched parameter is equal to the actual number of targets , resulting in large eigenvalues. Therefore, when , deleting eigenvalues will make produce a huge response. At this time, it can be preliminarily determined that is the target number.
- 3.
- When the estimated number , the search domain of GSP algorithm has one more dimension than , the function will also only produce spikes, and no matter how the value is increased, the response result remains unchanged. At this time, it can be determined that the estimated target is . As shown in Figure 13d, at this time, the parameter of the search domain is aligned with the target , whether the remaining dimension is aligned with the target or not, it will only make produce maximum values. At this time, even deleting the first maximum values will not affect the estimation results , because the remaining eigenvalues have nothing to do with the target parameters, even if deleted, it can still produce a huge corresponding effect on. At this time, it can be determined that the previously estimated is the target number .
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, T.; Wang, X.; Huang, M.; Lan, X.; Sun, L. Tensor-Based Reduced-Dimension MUSIC Method for Parameter Estimation in Monostatic FDA-MIMO Radar. Remote Sens. 2021, 13, 3772. [Google Scholar] [CrossRef]
- Weiss, S.; Alrmah, M.; Lambotharan, S.; McWhirter, J.; Kaveh, M. Broadband Angle of Arrival Estimation Methods in a Poly-nomial Matrix Decomposition Framework. In Proceedings of the 2013 5th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), St. Martin, France, 15–18 December 2013. [Google Scholar]
- Li, L.; Yao, J.; Liu, Y.; Yuan, W.; Shi, S.; Yuan, S. Optimal Seamline Detection for Orthoimage Mosaicking by Combining Deep Convolutional Neural Network and Graph Cuts. Remote Sens. 2017, 9, 701. [Google Scholar] [CrossRef] [Green Version]
- Moreira, L.A.S.; Ramos, A.L.L.; de Campos, M.L.R.; Apolinario, J.A.; Serrenho, F.G. A Graph Signal Processing Approach to, Direction of Arrival Estimation. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019. [Google Scholar] [CrossRef]
- Proudler, I.K.; Stankovic, V.; Weiss, S. Narrowband Angle of Arrival Estimation Exploiting Graph Topology and Graph Signals. In Proceedings of the 2020 Sensor Signal Processing for Defence Conference (SSPD), Edinburgh, UK, 15–16 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Raia, T.C.; Thomas, M.G.P.; Serrenho, F.G.; Apolinário, J.A., Jr. GSP-based DoA estimation for a multimission radar. In Proceedings of the XXXVIII Simpósio Brasileiro de Telecomunicações e Processamento de Sinais (SBrT2020), Florianopolis, Brazil, 22–25 November 2020. [Google Scholar]
- Jiang, L.; Cheng, M.; Matsumoto, T. A TOA-DOA Hybrid Factor Graph-Based Technique for Multi-Target Geolocation and Tracking. IEEE Access 2021, 9, 14203–14215. [Google Scholar] [CrossRef]
- Weisberg, K.; Laufer-Goldshtein, B.; Gannot, S. Simultaneous Tracking and Separation of Multiple Sources Using Factor Graph Model. IEEE ACM Trans. Audio, Speech, Lang. Process. 2020, 28, 2848–2864. [Google Scholar] [CrossRef]
- Alcantara, E.; Atlas, L.; Abadi, S. Direction-of-Arrival Estimation Using Signal Processing on Graphs. In Proceedings of the 2021 IEEE Statistical Signal Processing Workshop (SSP), Rio de Janeiro, Brazil, 11–14 July 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Ortega, P.A.; Frossard, J.; Kovačević, J.M.F.; Moura, P. Vandergheynst. Graph Signal Processing: Overview, Challenges, and Applications. Proc. IEEE 2018, 106, 808–828. [Google Scholar] [CrossRef] [Green Version]
- Alcantara, E.; Atlas, L.; Abadi, S. Applying concepts and tools from signal processing on graphs (SPG) to problems in array signal processing. J. Acoust. Soc. Am. 2018, 143, 1852. [Google Scholar] [CrossRef]
- Sandryhaila, A.; Moura, J.M.F. Discrete signal processing on graphs: Graph fourier transform. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 6167–6170. [Google Scholar] [CrossRef]
- Xiong, C.; Fan, C.; Huang, X. Time Reversal Linearly Constrained Minimum Power Algorithm for Direction of Arrival Esti-mation in Diffuse Multipath Environments. Remote Sens. 2020, 12, 3344. [Google Scholar] [CrossRef]
- Schwarz, U.J. Mathematical-statistical Description of the Iterative Beam Removing Technique (Method CLEAN). Astron. Astrophys. 1978, 65, 345–356. [Google Scholar]
- Van Trees, H.L. Optimum Array Processing; Part IV of Detection, Estimation, and Modulation Theory, Detection, Estimation, and Modulation Theory; Wiley: Hoboken, NJ, USA, 2004; pp. 154–196. [Google Scholar] [CrossRef]
- Nion, D.; Sidiropoulos, N. Tensor Algebra and Multidimensional Harmonic Retrieval in Signal Processing for MIMO Radar. IEEE Trans. Signal. Process. 2010, 58, 5693–5705. [Google Scholar] [CrossRef]
- Scharf, L.; Friedlander, B. Matched subspace detectors. IEEE Trans. Signal. Process. 1994, 42, 2146–2157. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Xu, K.; Quan, Y.; Zhu, S.; Xing, M. Signal Subspace Reconstruction for DOA Detection Using Quantum-Behaved Particle Swarm Optimization. Remote Sens. 2021, 13, 2560. [Google Scholar] [CrossRef]
- Leskovec, L.; Chakrabarti, D.; Kleinberg, J.; Faloutsos, C.; Ghahramani, Z. Kronecker graphs: An ap-proach to modeling networks. J. Mach. Learn. 2010, 11, 985–1042. [Google Scholar]
- Dudgeon, D.E.; Mersereau, R.M. Discrete-Time Signal. Processing; Prentice Hall: Hoboken, NJ, USA, 1983; pp. 1–3. [Google Scholar]
- Hellmuth, M.; Merkle, D.; Middendorf, M. Extended shapes for the combinatorial design of RNA sequences. Int. J. Comput. Biol. Drug Des. 2009, 2, 371–384. [Google Scholar] [CrossRef] [PubMed]
- Sandryhaila, A.; Moura, J.M. Big Data Analysis with Signal Processing on Graphs: Representation and processing of massive data sets with irregular structure. IEEE Signal. Process. Mag. 2014, 31, 80–90. [Google Scholar] [CrossRef]
- Xiao, P.; Xu, L.; Xu, L. Graph-based Matched Field Localization for an Underwater Source. arXiv 2010, arXiv:2101.07137. [Google Scholar]
- Schmidt, R.O. A Signal. Subspace Approach to Multiple Emitter Location and Spectral Estimation; Stanford University: Stanford, CA, USA, 1982; pp. 10–14. [Google Scholar]
- Morency, M.W.; Vorobyov, S.A.; Leus, G. Joint Detection and Localization of an Unknown Number of Sources Using the Algebraic Structure of the Noise Subspace. IEEE Trans. Signal. Process. 2018, 66, 4685–4700. [Google Scholar] [CrossRef] [Green Version]
- He, P.; Chen, B.; Yang, M. A novel sidelobe suppression method based on the CLEAN algorithm for bi-phase codes pulse compression. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Odendaal, J.W.; Barnard, E.; Pistorius, C.W.I. Two-dimensional Super-resolution radar imaging using the MUSIC algorithm. IEEE Trans. Antennas Propag. 1994, 42, 1386–1391. [Google Scholar] [CrossRef]
- Zhi, Q.; Zi, H.; Man, C. A method for signal source number estimation based on MUSIC algorithm. In Proceeding of the 2015 IEEE International Conference on Communication Problem-Solving (ICCP), Guilin, China, 16–18 October 2015; pp. 344–346. [Google Scholar]
- Istenic, R.; Zazula, D. Estimation of the Number of Signal Sources in Compound Signals Using Activity Index Variance. In Proceedings of the 2009 IEEE 13th Digital Signal Processing Workshop and 5th IEEE Signal Processing Education Workshop, Marco Island, FL, USA, 4–7 January 2009; pp. 178–181. [Google Scholar]
- Liu, L.; Yang, X.; Gao, S.; Li, S. Source Number and DOA Estimation Method Based on Eigen-Beam MUSIC for Closely Spaced Signals. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–5. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Azimuth Algorithm | SNR | −15 | −10 | −5 | 0 | 5 | 10 | 15 | 20 | 25 | 30 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Target | ||||||||||||||||||||||
| Nofull GSP | dual | 3.2609 | 1.986 | 1.5701 | 0.6960 | 0.5886 | 0.3843 | 0.1234 | 0.0640 | 0.0466 | 0.0541 | |||||||||||
| multi | ||||||||||||||||||||||
| MUSIC | dual | 12.8582 | 3.3694 | 1.1180 | 0.5914 | 0.2179 | 0.0961 | 0.0556 | 0.0290 | 0.0165 | 0.0096 | |||||||||||
| multi | 11.5408 | 7.8031 | 4.1142 | 1.0001 | 0.4475 | 0.1956 | 0.0825 | 0.0362 | 0.0208 | 0.0146 | ||||||||||||
| GSP | dual | 2.8021 | 1.6051 | 0.8867 | 0.4237 | 0.2831 | 0.1511 | 0.0854 | 0.0514 | 0.0332 | 0.0215 | |||||||||||
| multi | 5.9732 | 3.9298 | 1.9776 | 0.6449 | 0.5486 | 0.3342 | 0.1550 | 0.1203 | 0.0701 | 0.0327 | ||||||||||||
| Distance Algorithm | SNR | −15 | −10 | −5 | 0 | 5 | 10 | 15 | 20 | 25 | 30 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Target | ||||||||||||
| MUSIC | dual | 10.0107 | 2.0935 | 0.7245 | 0.4063 | 0.2167 | 0.1029 | 0.0620 | 0.0377 | 0.0221 | 0.0109 | |
| multi | 1.9717 | 1.1254 | 0.7681 | 0.3676 | 0.1551 | 0.0537 | 0.0244 | 0.0123 | 0.0078 | 0.0048 | ||
| GSP | dual | 11.537 | 3.3654 | 1.0572 | 0.4695 | 0.2675 | 0.1387 | 0.0785 | 0.0427 | 0.0272 | 0.0141 | |
| multi | 2.2137 | 0.9235 | 0.4333 | 0.2034 | 0.1867 | 0.1124 | 0.0467 | 0.0236 | 0.0167 | 0.0104 | ||
| Performance (%) | Azimuth Dual Target | Azimuth Multi Target | Distance Dual Target | Distance Multi Target | |||
|---|---|---|---|---|---|---|---|
| Algorithm | |||||||
| Nofull GSP | 76.9% (ANY SNR) | 23.64% (ANY SNR) | |||||
| MUSIC | 100% | 100% | 100% | 100% | |||
| GSP | 144.9% (LOW SNR) | 146.3% (LOW SNR) | 147.9% (ANY SNR) | 146.9% (ANY SNR) | |||
| Algorithm | Computational Complexity |
|---|---|
| MUSIC | |
| Nofull GSP (unoptimized) | |
| GSP (unoptimized) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, K.; Yu, Z.; Xie, N.; Jiang, J. Joint Estimation of Azimuth and Distance for Far-Field Multi Targets Based on Graph Signal Processing. Remote Sens. 2022, 14, 1110. https://doi.org/10.3390/rs14051110
Liao K, Yu Z, Xie N, Jiang J. Joint Estimation of Azimuth and Distance for Far-Field Multi Targets Based on Graph Signal Processing. Remote Sensing. 2022; 14(5):1110. https://doi.org/10.3390/rs14051110
Chicago/Turabian StyleLiao, Kefei, Zerui Yu, Ningbo Xie, and Junzheng Jiang. 2022. "Joint Estimation of Azimuth and Distance for Far-Field Multi Targets Based on Graph Signal Processing" Remote Sensing 14, no. 5: 1110. https://doi.org/10.3390/rs14051110
APA StyleLiao, K., Yu, Z., Xie, N., & Jiang, J. (2022). Joint Estimation of Azimuth and Distance for Far-Field Multi Targets Based on Graph Signal Processing. Remote Sensing, 14(5), 1110. https://doi.org/10.3390/rs14051110