
Automated Extraction of Ground Fissures Due to Coal Mining Subsidence Based on UAV Photogrammetry

 , ,
, ,  , and
, and
Abstract
:1. Introduction
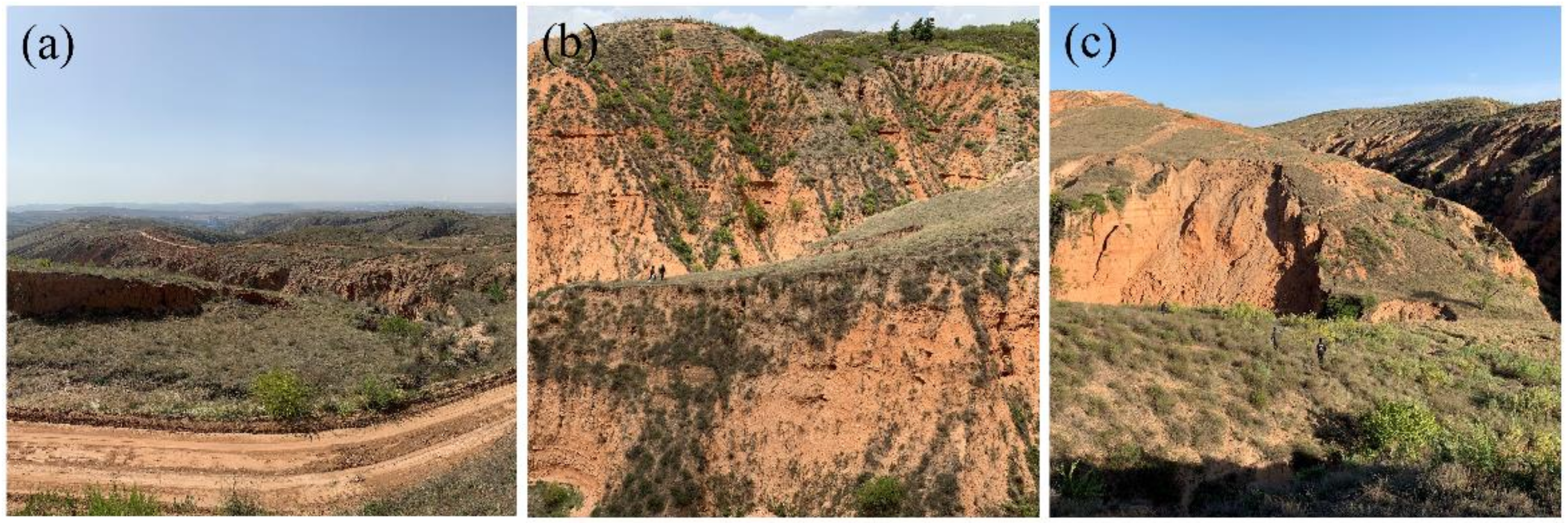
2. Types of Ground Fissure Observed in Mining Area
3. Study Area and Materials
3.1. Study Area
3.2. Data Acquisition and Preprocessing
4. Methods
4.1. Multiscale Hessian-Based Enhancement Filtering
4.2. Thresholding
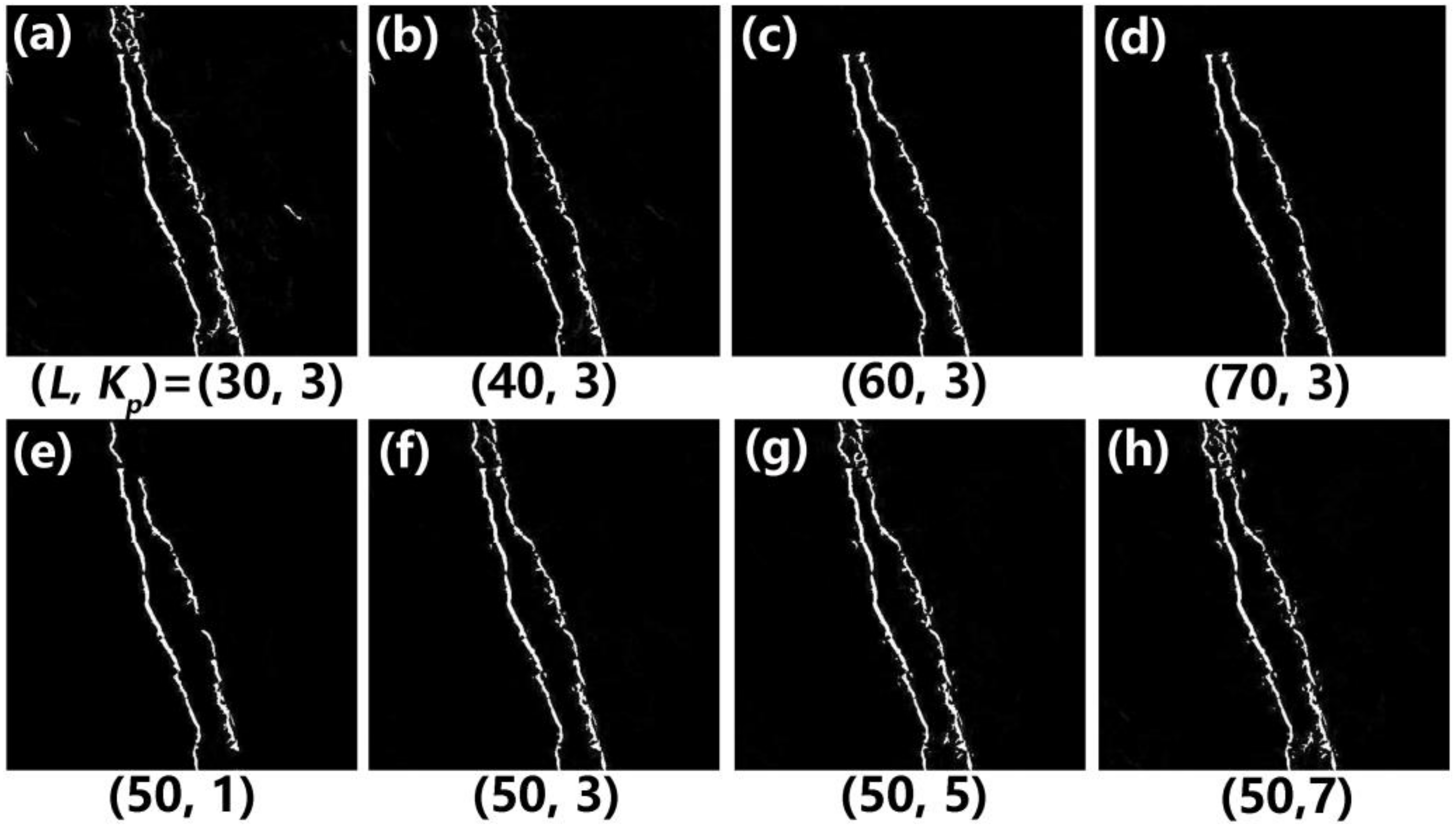
4.3. Incomplete Path Openings
4.4. Validation
5. Results
5.1. Accuracy Assessment
5.2. Impacts of
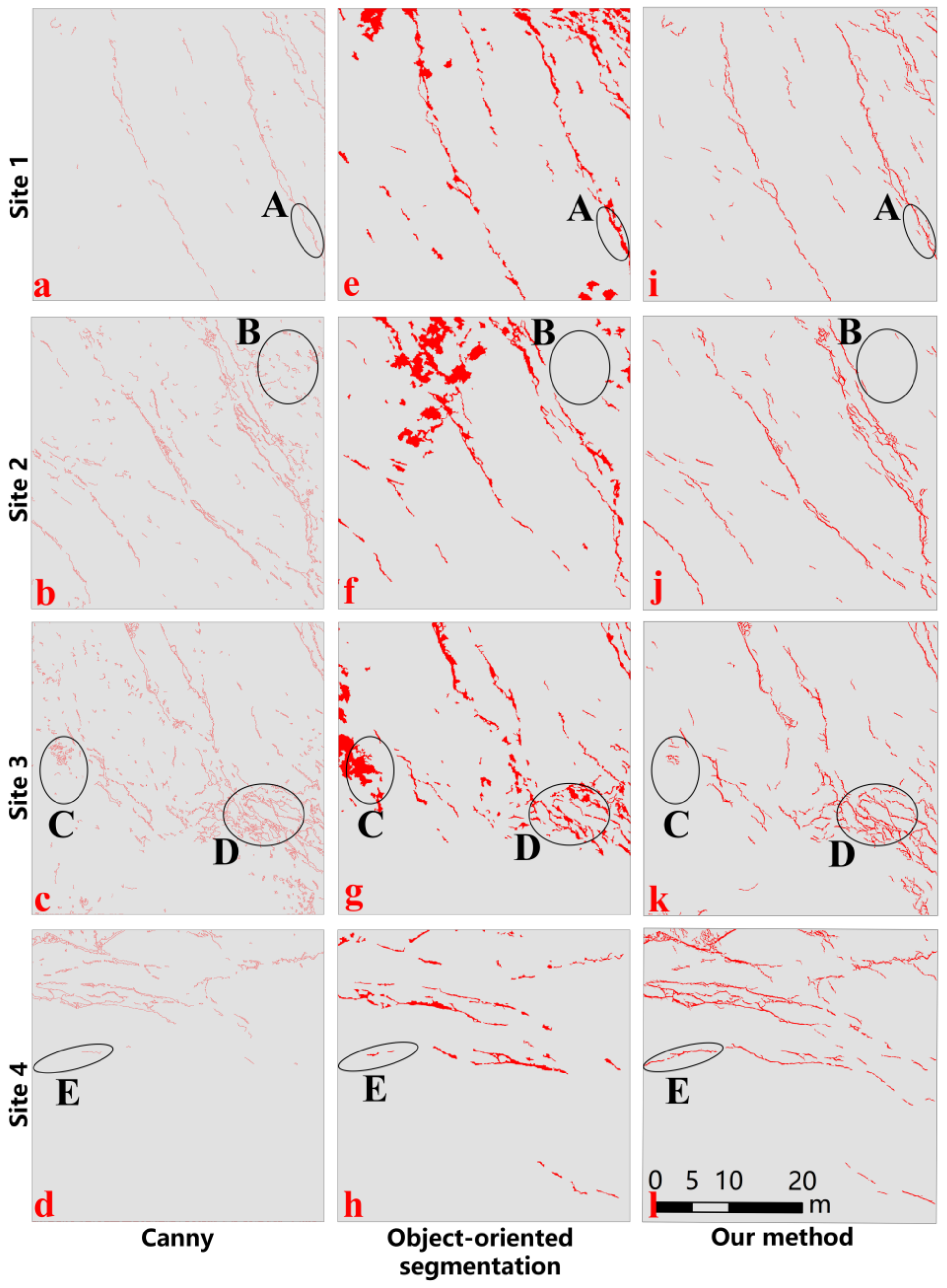
5.3. Ground Fissure Extraction Result
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IEA. Key World Energy Statistics 2021; IEA: Paris, France, 2021. [Google Scholar]
- Hu, Z.Q.; Wang, X.J.; He, A.M. Distribution characteristic and development rules of ground fissures due to coal mining in windy and sandy region. J. China Coal Soc. 2014, 39, 11–18. [Google Scholar] [CrossRef]
- Xu, C.; Ma, S.; Zhang, H.; Wang, R.; Guan, Z. Effect of cracks on soil characteristics and crop growth in subsided coal mining areas. Chin. J. Eco-Agric. 2015, 23, 597–604. [Google Scholar] [CrossRef]
- Kong, J.L.; Xian, T.; Yang, J.; Chen, L.; Yang, X.T. Monitoring soil moisture in a coal mining area with multi-phase Landsat images. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; pp. 537–542. [Google Scholar]
- Bi, Y.; Zhang, J.; Song, Z.; Wang, Z.; Qiu, L.; Hu, J.; Gong, Y. Arbuscular mycorrhizal fungi alleviate root damage stress induced by simulated coal mining subsidence ground fissures. Sci. Total Environ. 2019, 652, 398–405. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Bi, Y.; Song, Z.; Xiao, L.; Christie, P. Arbuscular mycorrhizal fungi alter root and foliar responses to fissure-induced root damage stress. Ecol. Indic. 2021, 127, 107800. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, M.; Zhang, F.; Tang, Y.; Wang, X.; Wang, Y. Revealing soil erosion characteristics using deposited sediment sources in a complex small catchment in the wind-water erosion crisscross region of the Chinese Loess Plateau. Geoderma 2020, 379, 114634. [Google Scholar] [CrossRef]
- Yang, D.; Qiu, H.; Ma, S.; Liu, Z.; Du, C.; Zhu, Y.; Cao, M. Slow surface subsidence and its impact on shallow loess landslides in a coal mining area. Catena 2022, 209, 105830. [Google Scholar] [CrossRef]
- Fan, L.M.; Zhang, X.T.; Xiang, M.X.; Zhang, H.Q.; Shen, T.; Lin, P.X. Characteristics of ground fissure development in high intensity mining area of shallow seam in Yushenfu coal field. J. China Coal Soc. 2015, 40, 1442–1447. [Google Scholar] [CrossRef]
- Li, L.; Wu, K.; Hu, Z.; Xu, Y.; Zhou, D. Analysis of developmental features and causes of the ground cracks induced by oversized working face mining in an aeolian sand area. Environ. Earth Sci. 2017, 76, 135. [Google Scholar] [CrossRef]
- Zhou, D.W.; Wu, K.; Bai, Z.H.; Hu, Z.Q.; Li, L.; Xu, Y.K.; Diao, X.P. Formation and development mechanism of ground crack caused by coal mining: Effects of overlying key strata. Bull. Eng. Geol. Environ. 2019, 78, 1025–1044. [Google Scholar] [CrossRef]
- Liu, H.; Deng, K.Z.; Zhu, X.J.; Jiang, C.L. Effects of mining speed on the developmental features of mining-induced ground fissures. Bull. Eng. Geol. Environ. 2019, 78, 6297–6309. [Google Scholar] [CrossRef]
- Fu, Y.; Shang, J.; Hu, Z.; Li, P.; Yang, K.; Chen, C.; Guo, J.; Yuan, D. Ground fracture development and surface fracture evolution in N00 method shallowly buried thick coal seam mining in an arid windy and sandy area: A case study of the Ningtiaota Mine (China). Energies 2021, 14, 7712. [Google Scholar] [CrossRef]
- Yang, X.; Wen, G.; Dai, L.; Sun, H.; Li, X. Ground subsidence and surface cracks evolution from shallow-buried close-distance multi-seam mining: A case study in Bulianta Coal Mine. Rock Mech. Rock Eng. 2019, 52, 2835–2852. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Stumpf, A.; Malet, J.-P.; Kerle, N.; Niethammer, U.; Rothmund, S. Image-based mapping of surface fissures for the investigation of landslide dynamics. Geomorphology 2013, 186, 12–27. [Google Scholar] [CrossRef] [Green Version]
- Perry, B.J.; Guo, Y.; Atadero, R.; van de Lindt, J.W. Streamlined bridge inspection system utilizing unmanned aerial vehicles (UAVs) and machine learning. Measurement 2020, 164, 108048. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, W.C.; Zhu, L.L.; Yuan, X.Z.; Zhang, C. Study on pavement defect detection based on image processing utilizing UAV. J. Phys. Conf. Ser. 2019, 1168, 042011. [Google Scholar] [CrossRef]
- Zollini, S.; Alicandro, M.; Dominici, D.; Quaresima, R.; Giallonardo, M. UAV photogrammetry for concrete bridge inspection using object-based image analysis (OBIA). Remote Sens. 2020, 12, 3180. [Google Scholar] [CrossRef]
- Al-Rawabdeh, A.; He, F.N.; Moussa, A.; El-Sheimy, N.; Habib, A. Using an unmanned aerial vehicle-based digital imaging system to derive a 3D point cloud for landslide scarp recognition. Remote Sens. 2016, 8, 95. [Google Scholar] [CrossRef] [Green Version]
- Bhowmick, S.; Nagarajaiah, S.; Veeraraghavan, A. Vision and Deep Learning-Based Algorithms to Detect and Quantify Cracks on Concrete Surfaces from UAV Videos. Sensors 2020, 20, 6299. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, Z.; Fu, Y.; Yang, K.; Wu, Q.; Feng, Z. A new identification method for surface cracks from UAV images based on machine learning in coal mining areas. Remote Sens. 2020, 12, 1571. [Google Scholar] [CrossRef]
- Jia, H.; Wei, B.; Liu, G.; Zhang, R.; Yu, B.; Wu, S. A semi-automatic method for extracting small ground fissures from loess areas using unmanned aerial vehicle images. Remote Sens. 2021, 13, 1784. [Google Scholar] [CrossRef]
- Zhao, Y.; Sun, B.; Liu, S.; Zhang, C.; He, X.; Xu, D.; Tang, W. Identification of mining induced ground fissures using UAV and infrared thermal imager: Temperature variation and fissure evolution. ISPRS J. Photogramm. Remote Sens. 2021, 180, 45–64. [Google Scholar] [CrossRef]
- Chen, C.; Hu, Z. Research advances in formation mechanism of ground crack due to coal mining subsidence in China. J. China Coal Soc. 2018, 43, 810–823. [Google Scholar] [CrossRef]
- Yu, X.; Li, B.; Li, R.; Duan, W.; Liu, P. Analysis of mining damage in huge thick collapsible loess of western China. J. China Univ. Min. Technol. 2008, 37, 43–47. [Google Scholar]
- Kang, J. Analysis of effect of fissures caused by underground mining on ground movement and deformation. Chin. J. Rock Mech. Eng. 2008, 27, 59–64. [Google Scholar]
- Liu, H.; He, C.G.; Deng, K.Z.; Bian, Z.F.; Fan, H.D.; Lei, S.G.; Zhang, A.B. Analysis of forming mechanism of collapsing ground fissure caused by mining. J. Min. Saf. Eng. 2013, 30, 380–384. [Google Scholar]
- Meinen, B.U.; Robinson, D.T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge-detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef]
- Marr, D.; Hildreth, E. Theory of edge detection. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1980, 207, 187–217. [Google Scholar] [CrossRef]
- Wang, C.L.; Oda, M.; Hayashi, Y.; Yoshino, Y.; Yamamoto, T.; Frangi, A.F.; Mori, K. Tensor-cut: A tensor-based graph-cut blood vessel segmentation method and its application to renal artery segmentation. Med. Image Anal. 2020, 60, 101623. [Google Scholar] [CrossRef]
- Lampert, T.A.; O’Keefe, S.E.M. A detailed investigation into low-level feature detection in spectrogram images. Pattern Recognit. 2011, 44, 2076–2092. [Google Scholar] [CrossRef] [Green Version]
- Frangi, A.F.; Niessen, W.J.; Vincken, K.L.; Viergever, M.A. Multiscale vessel enhancement filtering. Lect. Notes Comput. Sci. 1998, 1496, 130–137. [Google Scholar] [CrossRef] [Green Version]
- Sato, Y.; Nakajima, S.; Shiraga, N.; Atsumi, H.; Yoshida, S.; Koller, T.; Gerig, G.; Kikinis, R. Three-dimensional multi-scale line filter for segmentation and visualization of curvilinear structures in medical images. Med. Image Anal. 1998, 2, 143–168. [Google Scholar] [CrossRef]
- Heijmans, H. Path openings and closings. J. Math. Imaging Vis. 2005, 22, 107–119. [Google Scholar] [CrossRef]
- Talbot, H.; Appleton, B. Efficient complete and incomplete path openings and closings. Image Vis. Comput. 2007, 25, 416–425. [Google Scholar] [CrossRef]
- Yang, J.Z.; Huang, M.X.; Fu, J.; Lou, C.H.; Feng, C.L. Frangi based multi-scale level sets for retinal vascular segmentation. Comput. Methods Programs Biomed. 2020, 197, 105752. [Google Scholar] [CrossRef]
- Chen, H.Y.; Zhao, H.F.; Han, D.; Liu, W.P.; Chen, P.; Liu, K. Structure-aware-based crack defect detection for multicrystalline solar cells. Measurement 2020, 151, 107170. [Google Scholar] [CrossRef]
- Ghanta, S.; Shamsabadi, S.S.; Dy, J.; Wang, M.; Birken, R. A Hessian-based methodology for automatic surface crack detection and classification from pavement images. In Proceedings of the Structural Health Monitoring and Inspection of Advanced Materials, Aerospace, and Civil Infrastructure, San Diego, CA, USA, 9–12 March 2015; pp. 94371Z-1–94371Z-11. [Google Scholar]
- Tuermer, S.; Kurz, F.; Reinartz, P.; Stilla, U. Airborne vehicle detection in dense urban areas using HoG features and disparity maps. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2013, 6, 2327–2337. [Google Scholar] [CrossRef]
- Zhan, Q.M.; Molenaar, M.; Tempfli, K.; Shi, W.Z. Quality assessment for geo-spatial objects derived from remotely sensed data. Int. J. Remote Sens. 2005, 26, 2953–2974. [Google Scholar] [CrossRef]
- Wang, C.L.; Zhang, C.S.; Zhao, X.D.; Liao, L.; Zhang, S.L. Dynamic structural evolution of overlying strata during shallow coal seam longwall mining. Int. J. Rock Mech. Min. Sci. 2018, 103, 20–32. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, Y.; Abbott, A.L.; Wynne, R.H.; Hu, Z.; Zou, Y.; Tian, S. Automated mapping of typical cropland strips in the North China Plain using small unmanned aircraft systems (sUAS) photogrammetry. Remote Sens. 2019, 11, 2343. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Liu, J.; Li, J.; Meng, Y.; Pokhrel, Y.; Zhang, H. Basin-scale high-resolution extraction of drainage networks using 10-m Sentinel-2 imagery. Remote Sens. Environ. 2021, 255, 112281. [Google Scholar] [CrossRef]
- Yang, K.; Smith, L.C.; Sole, A.; Livingstone, S.J.; Cheng, X.; Chen, Z.; Li, M. Supraglacial rivers on the northwest Greenland Ice Sheet, Devon Ice Cap, and Barnes Ice Cap mapped using Sentinel-2 imagery. Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Deng, K.; Lei, S.; Bian, Z. Mechanism of formation of sliding ground fissure in loess hilly areas caused by underground mining. Int. J. Min. Sci. Technol. 2015, 25, 553–558. [Google Scholar] [CrossRef]
- Fathi Salmi, E.; Nazem, M.; Karakus, M. Numerical analysis of a large landslide induced by coal mining subsidence. Eng. Geol. 2017, 217, 141–152. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Li, B.; Yang, E.; Dai, X.; Peng, Y.; Fei, Y.; Liu, Y.; Li, J.Q.; Chen, C. Automated pixel-level pavement crack detection on 3D asphalt surfaces using a deep-learning network. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 805–819. [Google Scholar] [CrossRef]
- Bang, S.; Park, S.; Kim, H.; Kim, H. Encoder–decoder network for pixel-level road crack detection in black-box images. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 713–727. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Camera Specification | Camera Parameter |
|---|---|---|
| 1 | Focal length | 15 mm |
| 2 | Sensor size | 17.3 × 13 mm |
| 3 | Effective pixels | 20.8 megapixel |
| 4 | Diagonal field of view | 72° |
| 5 | Pixel size | 3.3 |
| 6 | Sensor type | CMOS |
| Reference Data | |||
|---|---|---|---|
| Fissure | Non-Fissure | ||
| Extraction data | Fissure | TP | FP |
| Non-fissure | FN | TN | |
| Site 1 | Ground Truth | User’s Accuracy/Correctness (%) | ||
|---|---|---|---|---|
| Fissure | Non-Fissure | |||
| Extraction data | Fissure | 6164 | 2557 | 70.68 |
| Non-fissure | 2923 | 2,273,452 | 99.87 | |
| Producer’s accuracy/Completeness (%) | 67.83 | 99.89 | Kappa (): 69.11% | |
| Site 2 | Ground Truth | User’s Accuracy/Correctness (%) | ||
| Fissure | Non-Fissure | |||
| Extraction data | Fissure | 8417 | 3079 | 73.22 |
| Non-fissure | 2238 | 2,267,757 | 99.90 | |
| Producer’s Accuracy/Completeness (%) | 79.00 | 99.86 | Kappa (): 75.88% | |
| Site 3 | Ground Truth | User’s Accuracy/Correctness (%) | ||
| Fissure | Non-Fissure | |||
| Extraction data | Fissure | 10,231 | 4591 | 69.03 |
| Non-fissure | 4591 | 2,257,914 | 99.80 | |
| Producer’s accuracy/Completeness (%) | 69.03 | 99.80 | Kappa (): 68.82% | |
| Site 4 | Ground Truth | User’s Accuracy/Correctness (%) | ||
| Fissure | Non-Fissure | |||
| Extraction data | Fissure | 9221 | 3936 | 70.08 |
| Non-fissure | 4701 | 2,261,024 | 99.79 | |
| Producer’s accuracy/Completeness (%) | 66.23 | 99.83 | Kappa (): 67.91% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Hu, Z.; Liang, Y.; Fu, Y.; Yuan, D.; Guo, J.; Li, G.; Li, Y. Automated Extraction of Ground Fissures Due to Coal Mining Subsidence Based on UAV Photogrammetry. Remote Sens. 2022, 14, 1071. https://doi.org/10.3390/rs14051071
Yang K, Hu Z, Liang Y, Fu Y, Yuan D, Guo J, Li G, Li Y. Automated Extraction of Ground Fissures Due to Coal Mining Subsidence Based on UAV Photogrammetry. Remote Sensing. 2022; 14(5):1071. https://doi.org/10.3390/rs14051071
Chicago/Turabian StyleYang, Kun, Zhenqi Hu, Yusheng Liang, Yaokun Fu, Dongzhu Yuan, Jiaxin Guo, Gensheng Li, and Yong Li. 2022. "Automated Extraction of Ground Fissures Due to Coal Mining Subsidence Based on UAV Photogrammetry" Remote Sensing 14, no. 5: 1071. https://doi.org/10.3390/rs14051071
APA StyleYang, K., Hu, Z., Liang, Y., Fu, Y., Yuan, D., Guo, J., Li, G., & Li, Y. (2022). Automated Extraction of Ground Fissures Due to Coal Mining Subsidence Based on UAV Photogrammetry. Remote Sensing, 14(5), 1071. https://doi.org/10.3390/rs14051071