
Reconstruction and Characterisation of Past and the Most Recent Slope Failure Events at the 2021 Rock-Ice Avalanche Site in Chamoli, Indian Himalaya



Abstract
1. Introduction
2. Study Area
3. Materials and Methods
3.1. Surface Velocity (SV) Change Estimation
3.2. Surface Velocity Uncertainty Estimation
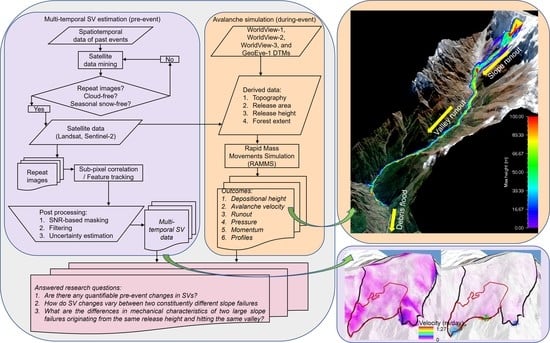
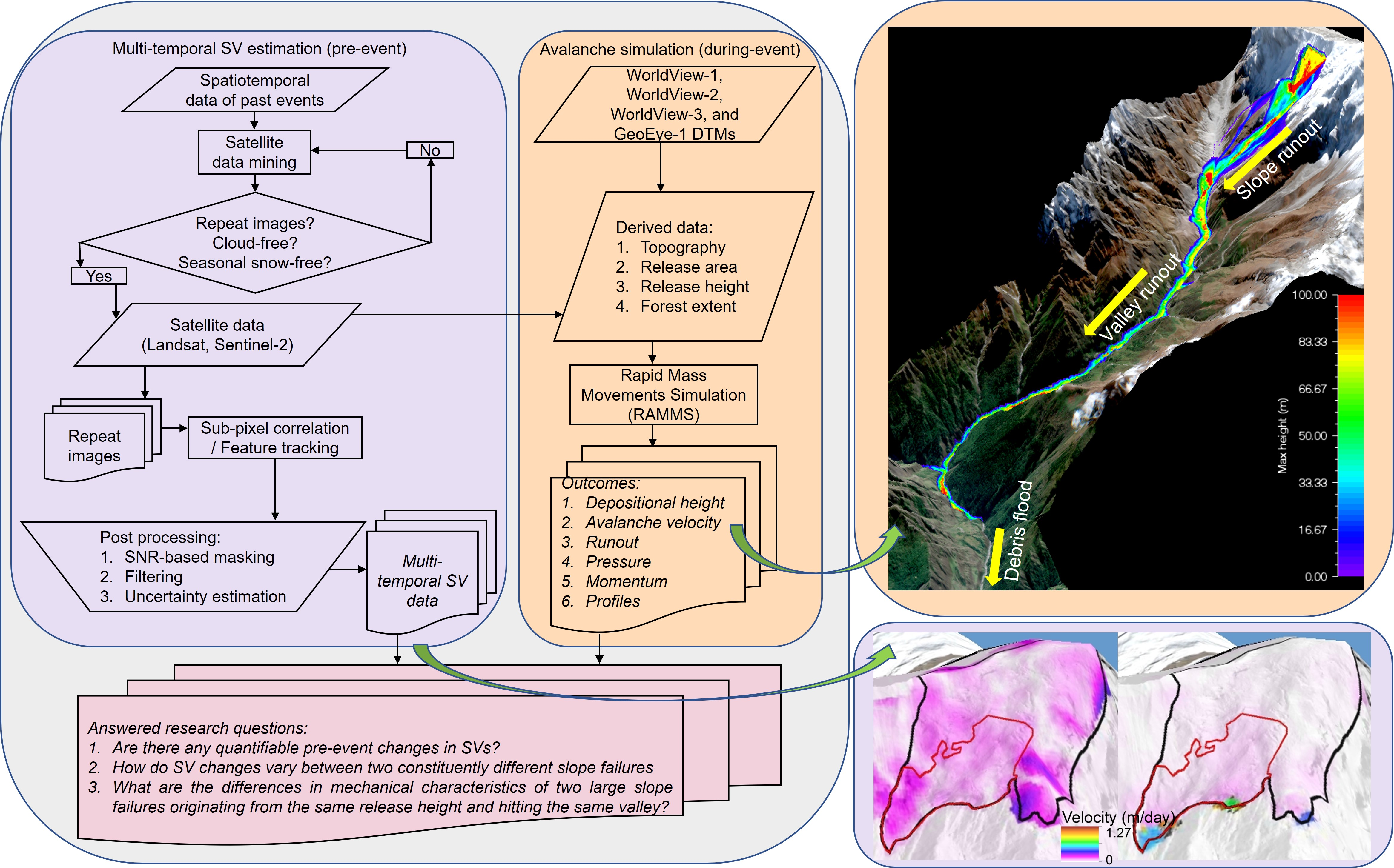
3.3. Rapid Mass Movement Simulation (RAMMS)
4. Results and Discussion
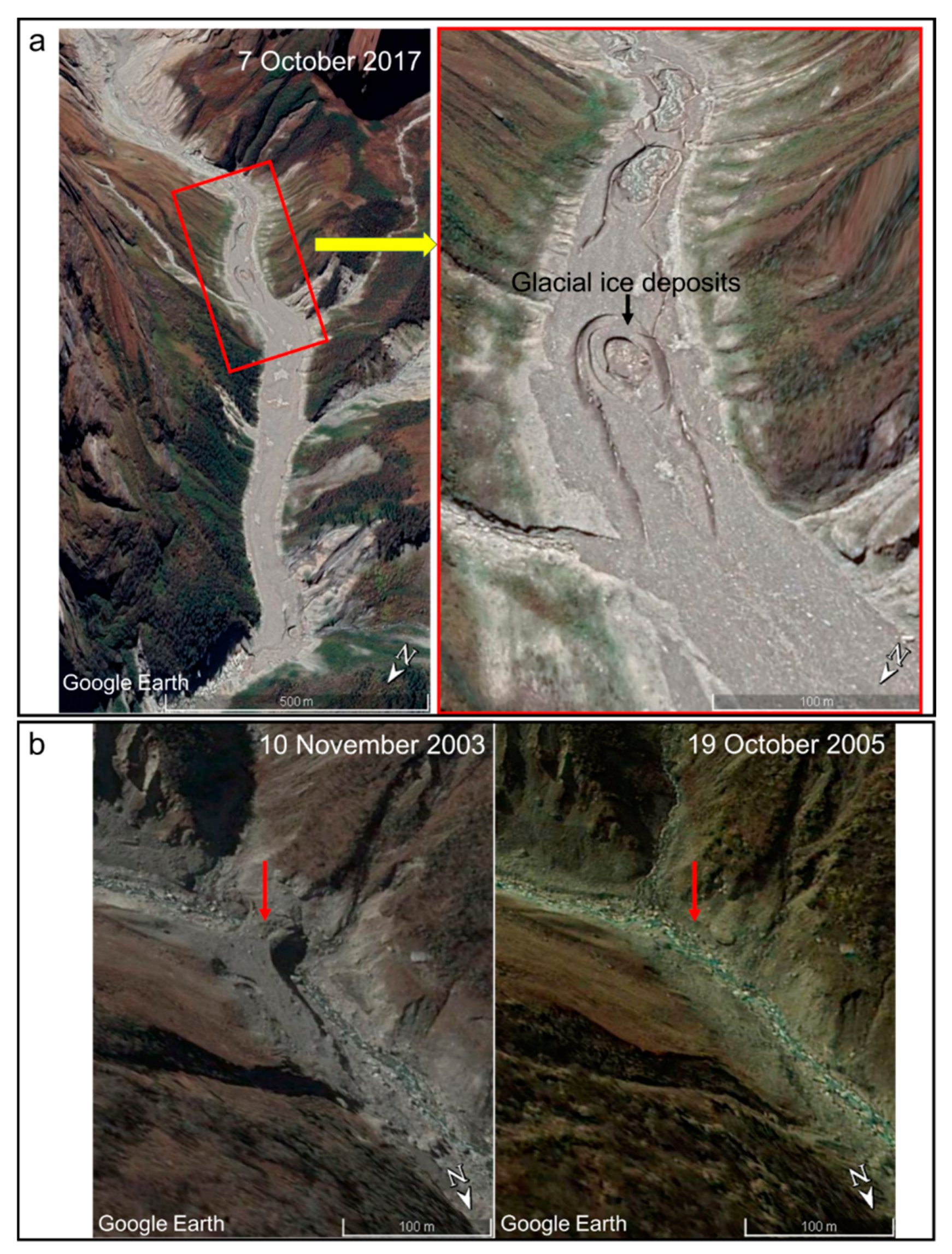
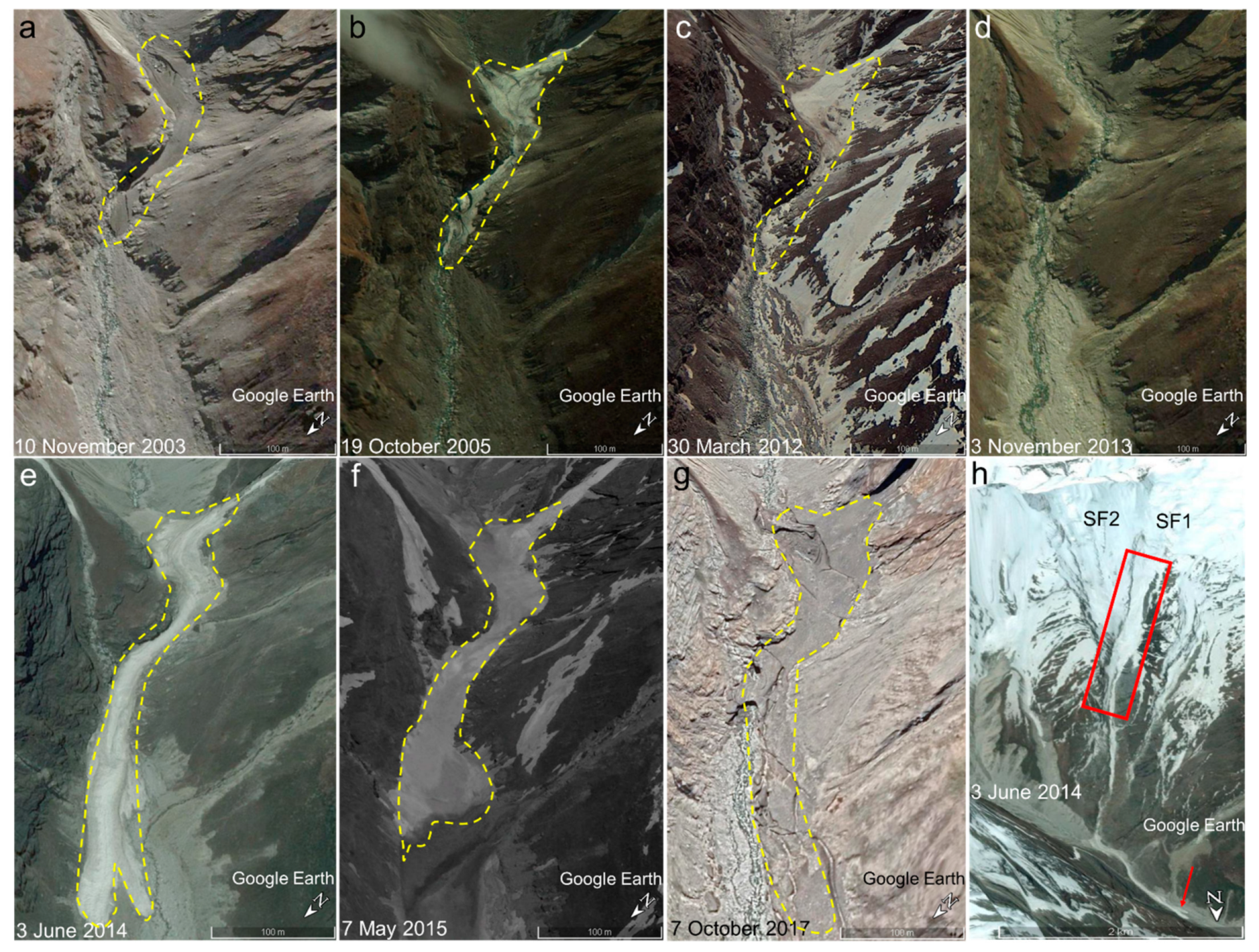
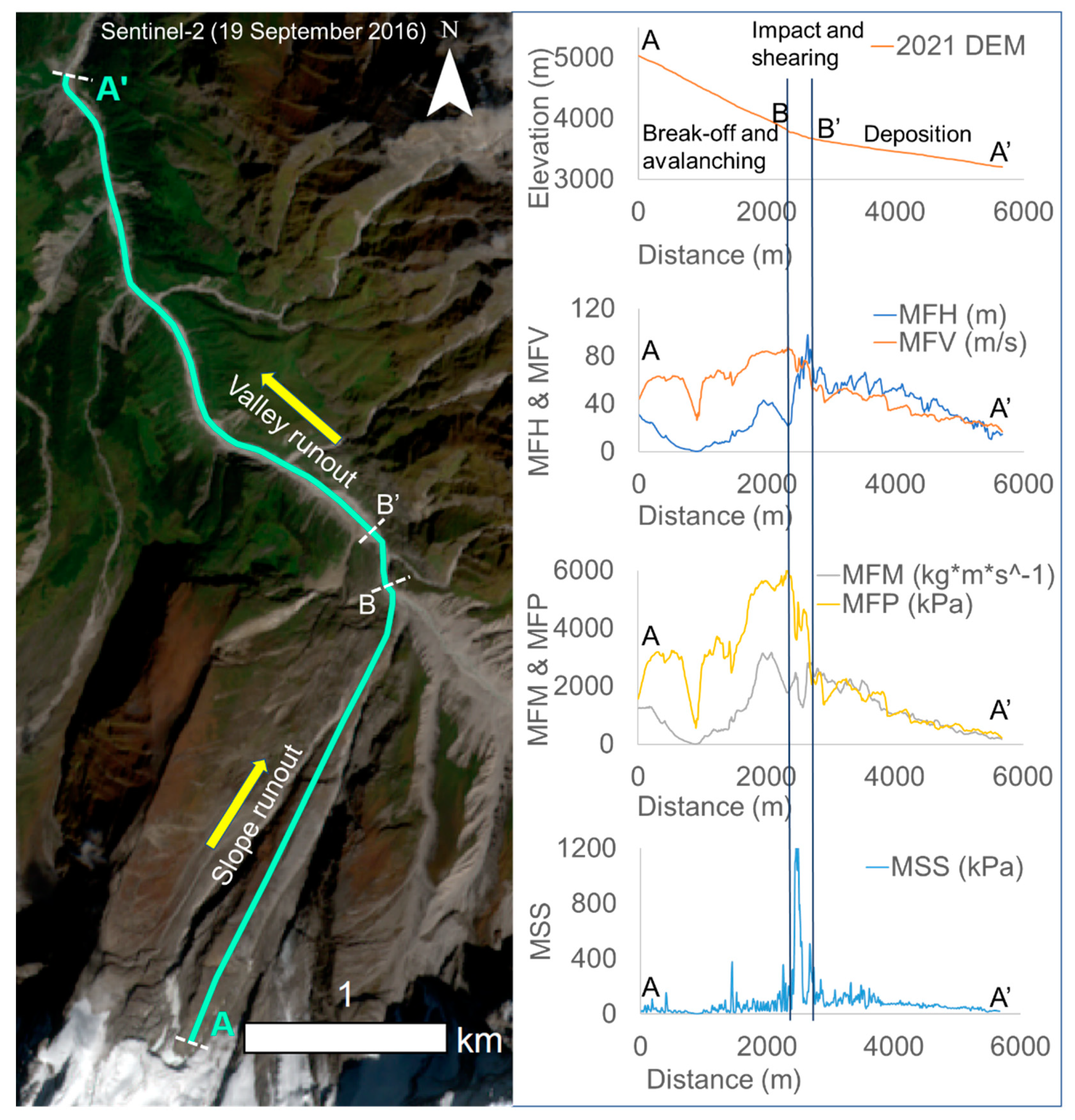
4.1. SF1: Key Observations and Pre-Event and During-Event Flow Characteristics
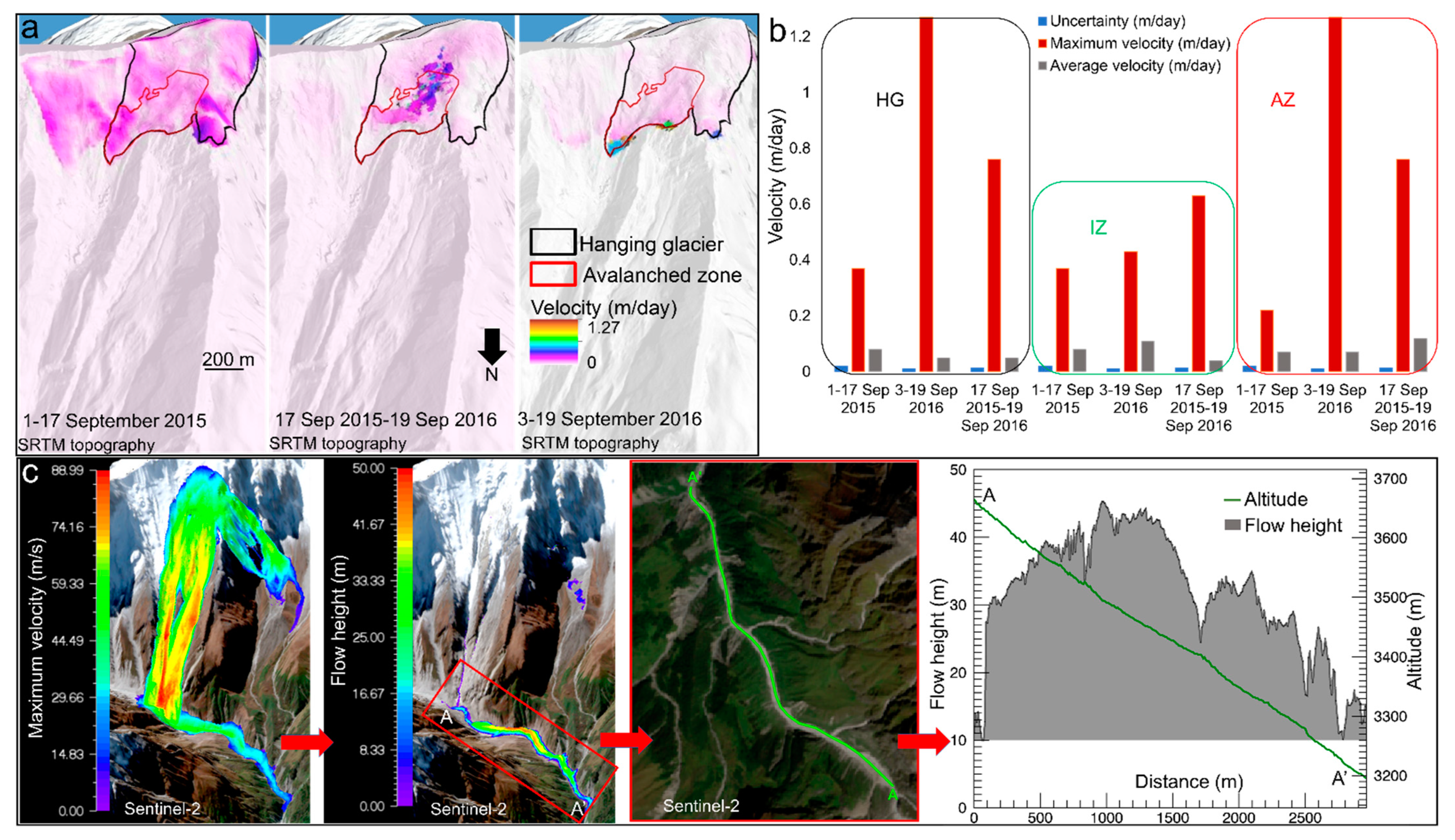
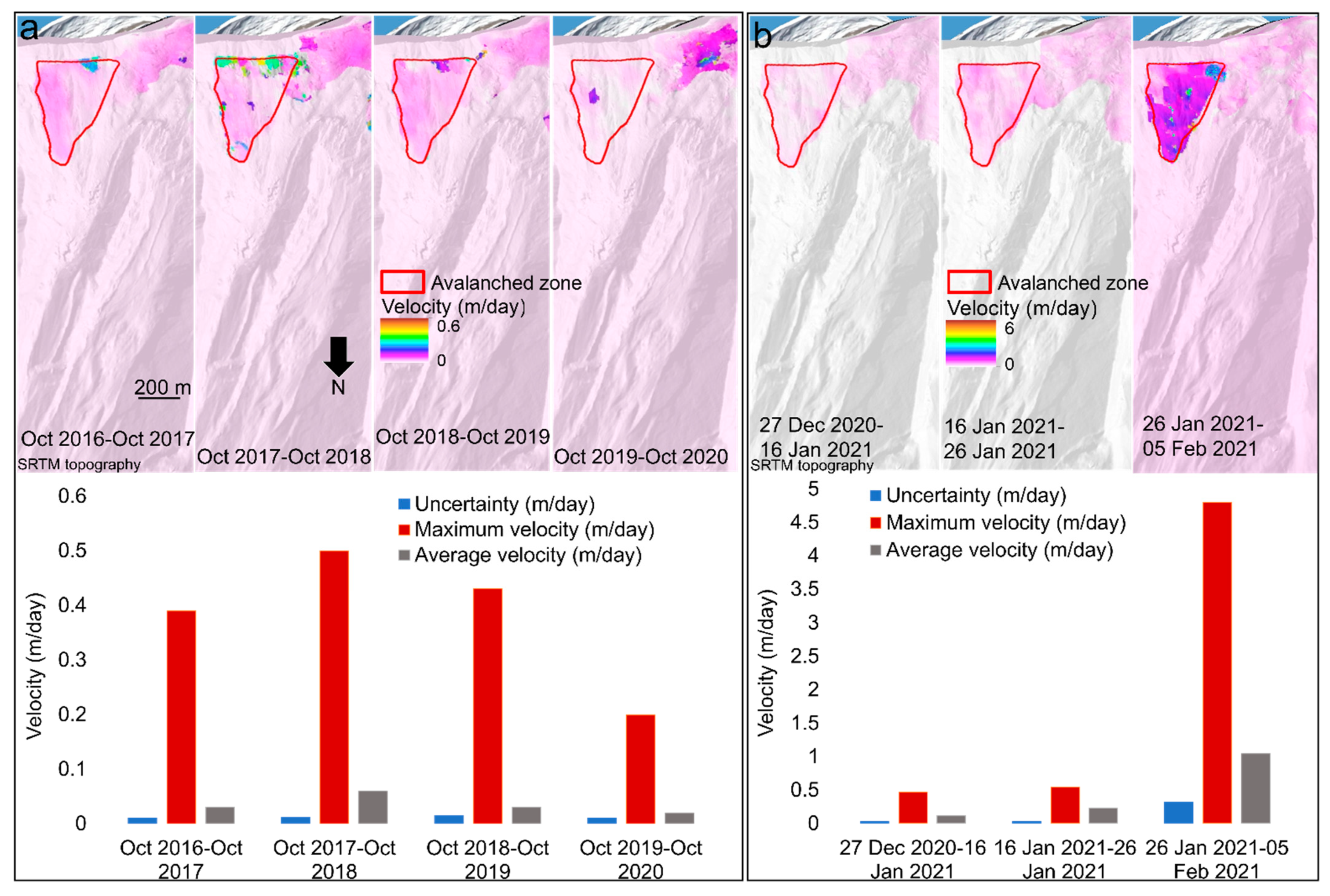
4.2. SF2: Long-Term and Short-Term Surface Velocity Evolution
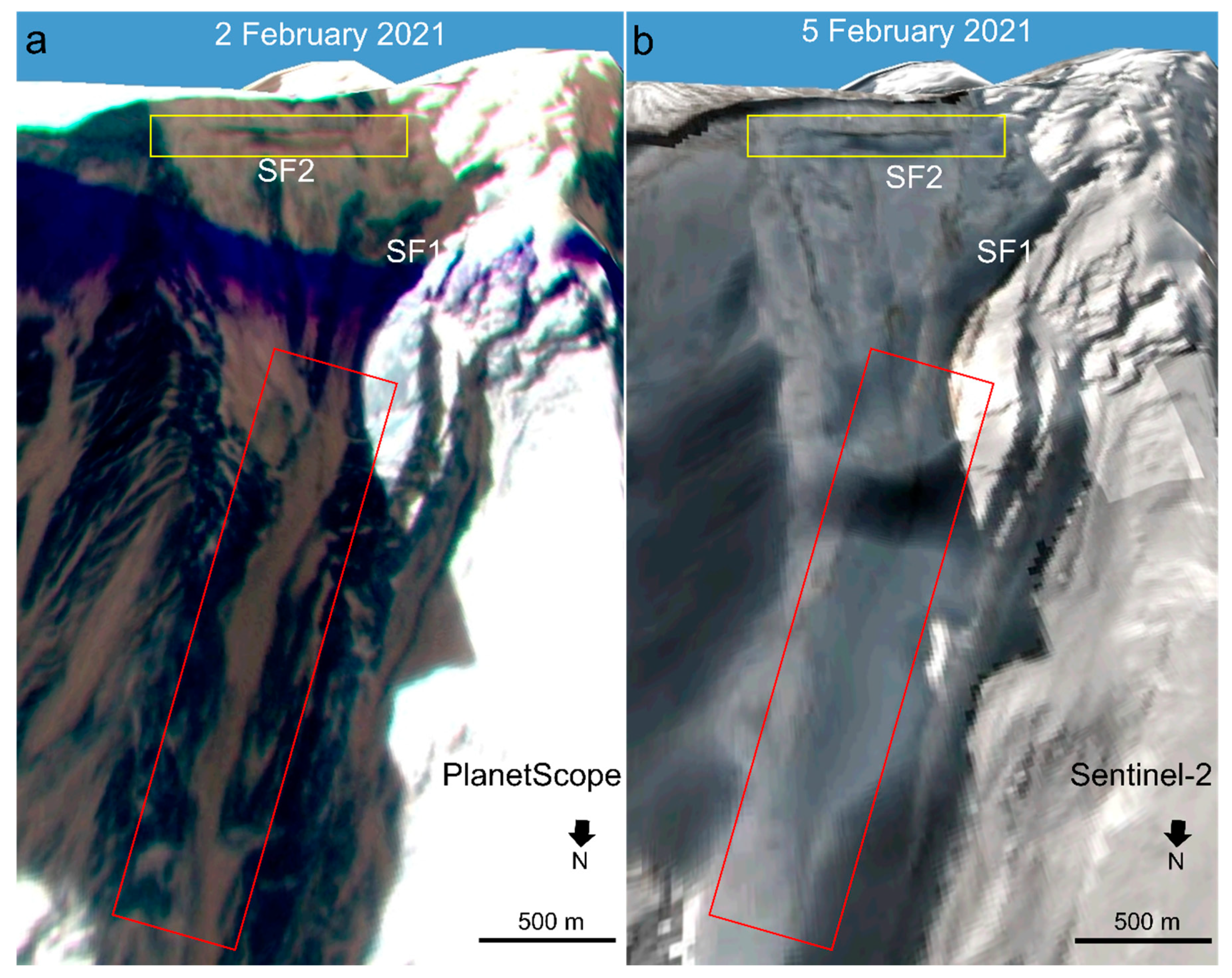
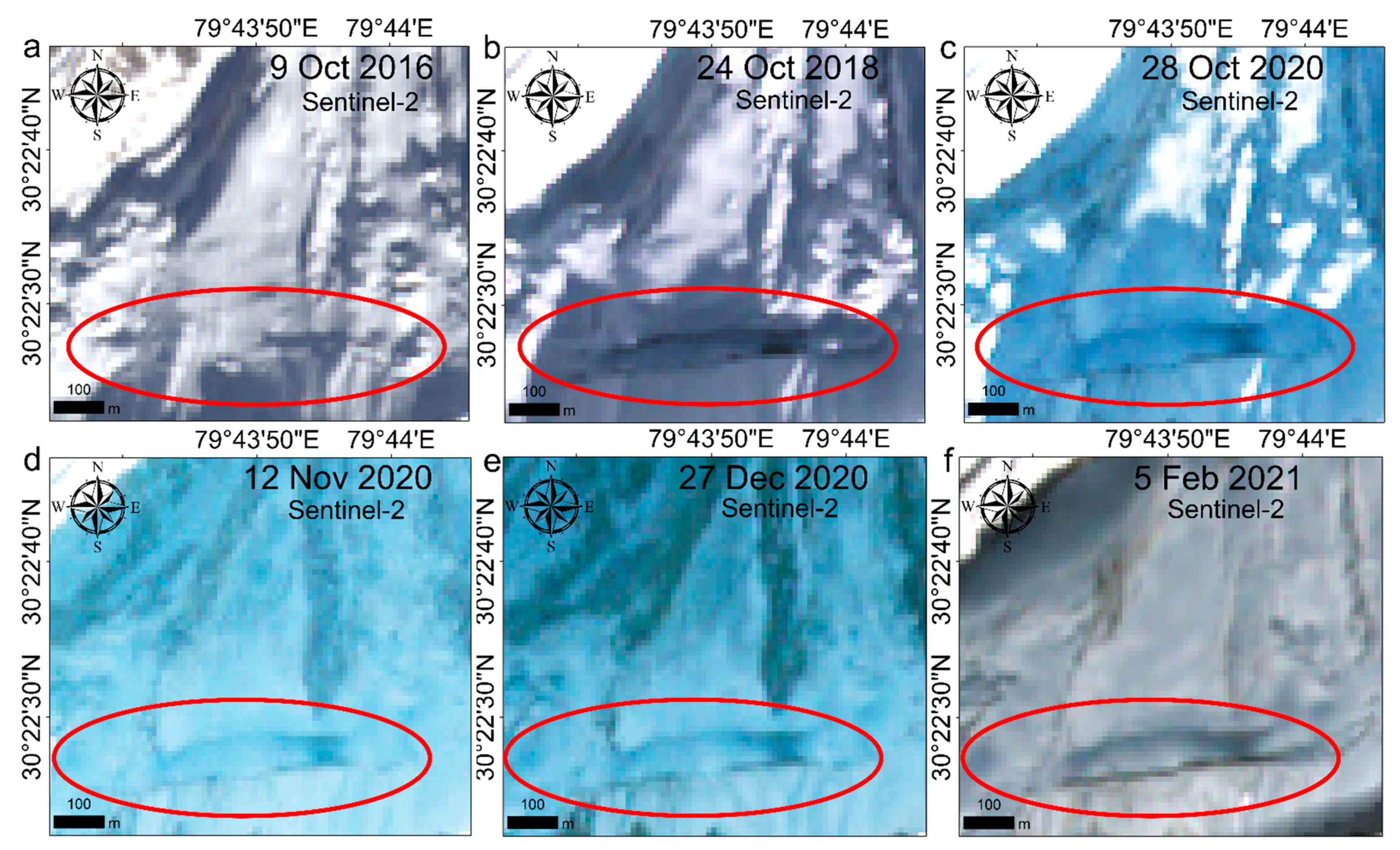
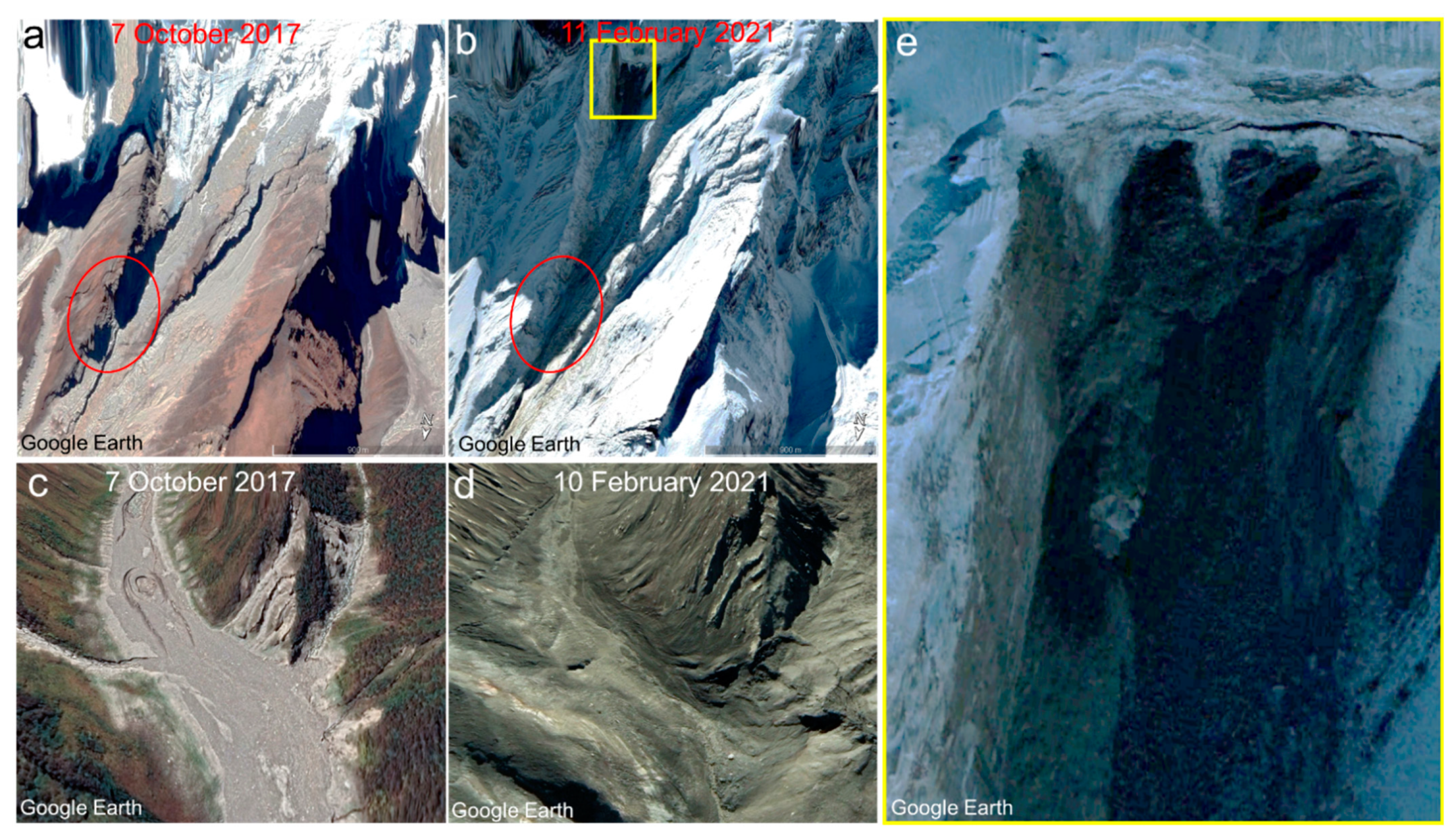
4.3. SF2: Key Observations and During-Event Flow Characteristics
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Froude, M.J.; Petley, D.N. Global Fatal Landslide Occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef]
- Petley, D.N.; Hearn, G.J.; Hart, A.; Rosser, N.J.; Dunning, S.A.; Oven, K.; Mitchell, W.A. Trends in Landslide Occurrence in Nepal. Nat. Hazards 2007, 43, 23–44. [Google Scholar] [CrossRef]
- Richardson, S.D.; Reynolds, J.M. An Overview of Glacial Hazards in the Himalayas. Quat. Int. 2000, 65, 31–47. [Google Scholar] [CrossRef]
- Haeberli, W.; Schaub, Y.; Huggel, C. Increasing Risks Related to Landslides from Degrading Permafrost into New Lakes in De-Glaciating Mountain Ranges. Geomorphology 2017, 293, 405–417. [Google Scholar] [CrossRef]
- Huggel, C. Recent Extreme Slope Failures in Glacial Environments: Effects of Thermal Perturbation. Quat. Sci. Rev. 2009, 28, 1119–1130. [Google Scholar] [CrossRef]
- Huggel, C.; Clague, J.J.; Korup, O. Is Climate Change Responsible for Changing Landslide Activity in High Mountains? Earth Surf. Processes Landf. 2012, 37, 77–91. [Google Scholar] [CrossRef]
- Kirschbaum, D.; Kapnick, S.B.; Stanley, T.; Pascale, S. Changes in Extreme Precipitation and Landslides over High Mountain Asia. Geophys. Res. Lett. 2020, 47, e2019GL085347. [Google Scholar] [CrossRef]
- Fischer, L.; Huggel, C.; Kääb, A.; Haeberli, W. Slope Failures and Erosion Rates on a Glacierized High-Mountain Face under Climatic Changes. Earth Surf. Processes Landf. 2013, 38, 836–846. [Google Scholar] [CrossRef]
- Martinsen, O. Mass Movements. In The Geological Deformation of Sediments; Maltman, A., Ed.; Springer: Dordrecht, The Netherlands, 1994; pp. 127–165. ISBN 978-94-011-0731-0. [Google Scholar]
- Lee, S.H.-H.; Widjaja, B. Phase Concept for Mudflow Based on the Influence of Viscosity. Soils Found. 2013, 53, 77–90. [Google Scholar] [CrossRef]
- Abe, K.; Konagai, K. Numerical Simulation for Runout Process of Debris Flow Using Depth-Averaged Material Point Method. Soils Found. 2016, 56, 869–888. [Google Scholar] [CrossRef]
- Takahashi, T. Debris Flow. Annu. Rev. Fluid Mech. 1981, 13, 57–77. [Google Scholar] [CrossRef]
- Bartelt, P.; Buser, O.; Vera Valero, C.; Bühler, Y. Configurational Energy and the Formation of Mixed Flowing/Powder Snow and Ice Avalanches. Ann. Glaciol. 2016, 57, 179–188. [Google Scholar] [CrossRef]
- Schaub, Y.; Huggel, C.; Cochachin, A. Ice-Avalanche Scenario Elaboration and Uncertainty Propagation in Numerical Simulation of Rock-/Ice-Avalanche-Induced Impact Waves at Mount Hualcán and Lake 513, Peru. Landslides 2016, 13, 1445–1459. [Google Scholar] [CrossRef]
- Wang, Z.-Y.; Lee, J.H.; Melching, C.S. Debris Flows and Landslides. In River Dynamics and Integrated River Management; Springer: Berlin/Heidelberg, Germany, 2015; pp. 193–264. [Google Scholar] [CrossRef]
- Kirschbaum, D.; Stanley, T.; Zhou, Y. Spatial and Temporal Analysis of a Global Landslide Catalog. Geomorphology 2015, 249, 4–15. [Google Scholar] [CrossRef]
- Sam, L.; Bhardwaj, A.; Sinha, V.S.P.; Joshi, P.K.; Kumar, R. Use of Geospatial Tools to Prioritize Zones of Hydro-Energy Potential in Glaciated Himalayan Terrain. J. Indian Soc. Remote Sens. 2016, 44, 409–420. [Google Scholar] [CrossRef]
- Snehmani; Bhardwaj, A.; Pandit, A.; Ganju, A. Demarcation of Potential Avalanche Sites Using Remote Sensing and Ground Observations: A Case Study of Gangotri Glacier. Geocarto Int. 2014, 29, 520–535. [Google Scholar] [CrossRef]
- Snehmani; Bhardwaj, A.; Singh, M.K.; Gupta, R.D.; Joshi, P.K.; Ganju, A. Modelling the Hypsometric Seasonal Snow Cover Using Meteorological Parameters. J. Spat. Sci. 2015, 60, 51–64. [Google Scholar] [CrossRef]
- Kääb, A.; Jacquemart, M.; Gilbert, A.; Leinss, S.; Girod, L.; Huggel, C.; Falaschi, D.; Ugalde, F.; Petrakov, D.; Chernomorets, S.; et al. Sudden Large-Volume Detachments of Low-Angle Mountain Glaciers—More Frequent than Thought? Cryosphere 2021, 15, 1751–1785. [Google Scholar] [CrossRef]
- Shugar, D.H.; Jacquemart, M.; Shean, D.; Bhushan, S.; Upadhyay, K.; Sattar, A.; Schwanghart, W.; McBride, S.; de Vries, M.V.W.; Mergili, M. A Massive Rock and Ice Avalanche Caused the 2021 Disaster at Chamoli, Indian Himalaya. Science 2021, 373, 300–306. [Google Scholar] [CrossRef]
- Jiang, R.; Zhang, L.; Peng, D.; He, X.; He, J. The Landslide Hazard Chain in the Tapovan of the Himalayas on 7 February 2021. Geophys. Res. Lett. 2021, 48, e2021GL093723. [Google Scholar] [CrossRef]
- Martha, T.R.; Roy, P.; Jain, N.; Kumar, K.V.; Reddy, P.S.; Nalini, J.; Sharma, S.; Shukla, A.K.; Rao, K.D.; Narender, B. Rock Avalanche Induced Flash Flood on 07 February 2021 in Uttarakhand, India—A Photogeological Reconstruction of the Event. Landslides 2021, 18, 2881–2893. [Google Scholar] [CrossRef]
- Mao, W.; Wu, L.; Singh, R.P.; Qi, Y.; Xie, B.; Liu, Y.; Ding, Y.; Zhou, Z.; Li, J. Progressive Destabilization and Triggering Mechanism Analysis Using Multiple Data for Chamoli Rockslide in 7 February 2021. Geomat. Nat. Hazards Risk 2022, 13, 35–53. [Google Scholar] [CrossRef]
- Christen, M.; Bühler, Y.; Bartelt, P.; Leine, R.; Glover, J.; Schweizer, A.; Graf, C.; McArdell, B.W.; Gerber, W.; Deubelbeiss, Y.; et al. Integral hazard management using a unified software environment: Numerical simulation tool “RAMMS” for gravitational natural hazards. In Proceedings of the 12th Congress Interpraevent, Grenoble, France, 23–26 April 2012; Koboltschnig, G., Hübl, J., Braun, J., Eds.; 2012; pp. 77–86. [Google Scholar]
- Pandey, P.; Chauhan, P.; Bhatt, C.M.; Thakur, P.K.; Kannaujia, S.; Dhote, P.R.; Roy, A.; Kumar, S.; Chopra, S.; Bhardwaj, A. Cause and Process Mechanism of Rockslide Triggered Flood Event in Rishiganga and Dhauliganga River Valleys, Chamoli, Uttarakhand, India Using Satellite Remote Sensing and in Situ Observations. J. Indian Soc. Remote Sens. 2021, 49, 1011–1024. [Google Scholar] [CrossRef]
- Shekhar, M.; Bhardwaj, A.; Singh, S.; Ranhotra, P.S.; Bhattacharyya, A.; Pal, A.K.; Roy, I.; Martín-Torres, F.J.; Zorzano, M.-P. Himalayan Glaciers Experienced Significant Mass Loss during Later Phases of Little Ice Age. Sci. Rep. 2017, 7, 10305. [Google Scholar] [CrossRef] [PubMed]
- Kumar, V.; Mehta, M.; Mishra, A.; Trivedi, A. Temporal Fluctuations and Frontal Area Change of Bangni and Dunagiri Glaciers from 1962 to 2013, Dhauliganga Basin, Central Himalaya, India. Geomorphology 2017, 284, 88–98. [Google Scholar] [CrossRef]
- Mehta, M.; Kumar, V.; Sain, K.; Tiwari, S.K.; Kumar, A.; Verma, A. Causes and Consequences of Rishiganga Flash Flood, Nanda Devi Biosphere Reserve, Central Himalaya, India. Curr. Sci. 2021, 121, 1483–1487. [Google Scholar]
- Mauro, Y. Geology and Metamorphism of the Nanda Devi Region, Kumaun Higher Himalaya. Himal. Geol. 1979, 9, 3–17. [Google Scholar]
- Valdiya, K.S.; Goel, O.P. Lithological Subdivision and Petrology of the Great Himalayan Vaikrita Group in Kumaun, India. Proc. Indian Acad. Sci.-Earth Planet. Sci. 1983, 92, 141–163. [Google Scholar] [CrossRef]
- Sahoo, P.K.; Kumar, S.; Singh, R.P. Neotectonic Study of Ganga and Yamuna Tear Faults, NW Himalaya, Using Remote Sensing and GIS. Int. J. Remote Sens. 2000, 21, 499–518. [Google Scholar] [CrossRef]
- McColl, S.T. Paraglacial Rock-Slope Stability. Geomorphology 2012, 153, 1–16. [Google Scholar] [CrossRef]
- Massive Flood as Glacier Breaks Off at Uttarakhand’s Joshimath, 150 Labourers Missing. Available online: https://www.youtube.com/watch?v=DoWivEFpbsE (accessed on 23 January 2022).
- ICIMOD. Major River Basins in the Hindu Kush Himalaya (HKH) Region [Data Set]; ICIMOD: Lalitpur, Nepal, 2021. [Google Scholar] [CrossRef]
- Bhushan, S.; Shean, D. Chamoli Disaster Pre-Event 2-m DEM Composite: September 2015 (1.0) [Data Set]; Zenodo: Brussels, Belgium, 2021. [Google Scholar] [CrossRef]
- Shean, D.E.; Alexandrov, O.; Moratto, Z.M.; Smith, B.E.; Joughin, I.R.; Porter, C.; Morin, P. An Automated, Open-Source Pipeline for Mass Production of Digital Elevation Models (DEMs) from Very-High-Resolution Commercial Stereo Satellite Imagery. ISPRS J. Photogramm. Remote Sens. 2016, 116, 101–117. [Google Scholar] [CrossRef]
- Shean, D.E.; Bhushan, S.; Montesano, P.; Rounce, D.R.; Arendt, A.; Osmanoglu, B. A Systematic, Regional Assessment of High Mountain Asia Glacier Mass Balance. Front. Earth Sci. 2020, 7, 363. [Google Scholar] [CrossRef]
- Deschamps-Berger, C.; Gascoin, S.; Berthier, E.; Deems, J.; Gutmann, E.; Dehecq, A.; Shean, D.; Dumont, M. Snow Depth Mapping from Stereo Satellite Imagery in Mountainous Terrain: Evaluation Using Airborne Laser-Scanning Data. Cryosphere 2020, 14, 2925–2940. [Google Scholar] [CrossRef]
- Shean, D.; Bhushan, S.; Berthier, E.; Deschamps-Berger, C.; Gascoin, S.; Knuth, F. Chamoli Disaster Post-Event 2-m DEM Composite (10–11 February 2021) and Difference Map (1.0) [Data Set]; Zenodo: Brussels, Belgium, 2021. [Google Scholar] [CrossRef]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J.-P. Automatic and Precise Orthorectification, Coregistration, and Subpixel Correlation of Satellite Images, Application to Ground Deformation Measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1529–1558. [Google Scholar] [CrossRef]
- Scherler, D.; Leprince, S.; Strecker, M.R. Glacier-Surface Velocities in Alpine Terrain from Optical Satellite Imagery—Accuracy Improvement and Quality Assessment. Remote Sens. Environ. 2008, 112, 3806–3819. [Google Scholar] [CrossRef]
- Lacroix, P.; Bièvre, G.; Pathier, E.; Kniess, U.; Jongmans, D. Use of Sentinel-2 Images for the Detection of Precursory Motions before Landslide Failures. Remote Sens. Environ. 2018, 215, 507–516. [Google Scholar] [CrossRef]
- Sam, L.; Bhardwaj, A.; Singh, S.; Kumar, R. Remote Sensing Flow Velocity of Debris-Covered Glaciers Using Landsat 8 Data. Prog. Phys. Geogr. Earth Environ. 2016, 40, 305–321. [Google Scholar] [CrossRef]
- USGS EarthExplorer. Available online: https://earthexplorer.usgs.gov/ (accessed on 10 March 2021).
- Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 10 March 2021).
- Sam, L.; Bhardwaj, A.; Kumar, R.; Buchroithner, M.F.; Martín-Torres, F.J. Heterogeneity in Topographic Control on Velocities of Western Himalayan Glaciers. Sci. Rep. 2018, 8, 12843. [Google Scholar] [CrossRef]
- Garg, P.K.; Shukla, A.; Jasrotia, A.S. On the Strongly Imbalanced State of Glaciers in the Sikkim, Eastern Himalaya, India. Sci. Total Environ. 2019, 691, 16–35. [Google Scholar] [CrossRef]
- Heid, T.; Kääb, A. Repeat Optical Satellite Images Reveal Widespread and Long Term Decrease in Land-Terminating Glacier Speeds. Cryosphere 2012, 6, 467–478. [Google Scholar] [CrossRef]
- Scherler, D.; Strecker, M.R. Large Surface Velocity Fluctuations of Biafo Glacier, Central Karakoram, at High Spatial and Temporal Resolution from Optical Satellite Images. J. Glaciol. 2012, 58, 569–580. [Google Scholar] [CrossRef]
- Dreier, L.; Bühler, Y.; Ginzler, C.; Bartelt, P. Comparison of Simulated Powder Snow Avalanches with Photogrammetric Measurements. Ann. Glaciol. 2016, 57, 371–381. [Google Scholar] [CrossRef]
- Frank, F.; McArdell, B.W.; Huggel, C.; Vieli, A. The Importance of Entrainment and Bulking on Debris Flow Runout Modeling: Examples from the Swiss Alps. Nat. Hazards Earth Syst. Sci. 2015, 15, 2569–2583. [Google Scholar] [CrossRef]
- Margreth, S.; Funk, M.; Tobler, D.; Dalban, P.; Meier, L.; Lauper, J. Analysis of the Hazard Caused by Ice Avalanches from the Hanging Glacier on the Eiger West Face. Cold Reg. Sci. Technol. 2017, 144, 63–72. [Google Scholar] [CrossRef]
- Rodríguez-Morata, C.; Villacorta, S.; Stoffel, M.; Ballesteros-Cánovas, J.A. Assessing Strategies to Mitigate Debris-Flow Risk in Abancay Province, South-Central Peruvian Andes. Geomorphology 2019, 342, 127–139. [Google Scholar] [CrossRef]
- Gilany, N.; Iqbal, J. Simulation of Glacial Avalanche Hazards in Shyok Basin of Upper Indus. Sci. Rep. 2019, 9, 20077. [Google Scholar] [CrossRef]
- Allen, S.K.; Schneider, D.; Owens, I.F. First Approaches towards Modelling Glacial Hazards in the Mount Cook Region of New Zealand’s Southern Alps. Nat. Hazards Earth Syst. Sci. 2009, 9, 481–499. [Google Scholar] [CrossRef]
- Chrustek, P.; Świerk, M.; Biskupić, M. Snow Avalanche Hazard Mapping for Different Frequency Scenarios, the Case of the Tatra Mts., Western Carpathians. In Proceedings of the 2013 International Snow Science Workshop, Grenoble–Chamonix Mont-Blanc, France, 7–11 October 2013; pp. 745–749. [Google Scholar]
- Bartelt, P.; Valero, C.V.; Feistl, T.; Christen, M.; Bühler, Y.; Buser, O. Modelling Cohesion in Snow Avalanche Flow. J. Glaciol. 2015, 61, 837–850. [Google Scholar] [CrossRef]
- RAMMS Downloads. Available online: https://ramms.slf.ch/ramms/index.php?option=com_content&view=article&id=53&Itemid=70 (accessed on 30 July 2021).
- New Thermomechanical Model for Rock/Ice Avalanches. Available online: https://www.slf.ch/en/news/2018/04/new-thermomechanical-model-for-rockice-avalanches.html#tabelement1-tab2 (accessed on 30 July 2021).
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Zorzano, M.-P. Are Slope Streaks Indicative of Global-Scale Aqueous Processes on Contemporary Mars? Rev. Geophys. 2019, 57, 48–77. [Google Scholar] [CrossRef]
- Singh, M.K.; Snehmani; Gupta, R.D.; Bhardwaj, A.; Joshi, P.K.; Ganju, A. High Resolution DEM Generation for Complex Snow Covered Indian Himalayan Region Using ADS80 Aerial Push-Broom Camera: A First Time Attempt. Arab. J. Geosci. 2015, 8, 1403–1414. [Google Scholar] [CrossRef]
- Smithson, S.B. Densities of Metamorphic Rocks. Geophysics 1971, 36, 690–694. [Google Scholar] [CrossRef]
- Planet Team. Planet Application Program Interface: In Space for Life on Earth; Planet Team: San Francisco, CA, USA, 2017. [Google Scholar]
- Fernandez, P.; Whitworth, M. A New Technique for the Detection of Large Scale Landslides in Glacio-Lacustrine Deposits Using Image Correlation Based upon Aerial Imagery: A Case Study from the French Alps. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 1–11. [Google Scholar] [CrossRef][Green Version]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Brief Communication: Landslide Motion from Cross Correlation of UAV-Derived Morphological Attributes. Nat. Hazards Earth Syst. Sci. 2017, 17, 2143–2150. [Google Scholar] [CrossRef]
- Türk, T. Determination of Mass Movements in Slow-Motion Landslides by the Cosi-Corr Method. Geomat. Nat. Hazards Risk 2018, 9, 325–336. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; De Jong, S.M. Time Series Analysis of Landslide Dynamics Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Sam, L.; Gahlot, N.; Prusty, B.G. Estimation of Dune Celerity and Sand Flux in Part of West Rajasthan, Gadra Area of the Thar Desert Using Temporal Remote Sensing Data. Arab. J. Geosci. 2015, 8, 295–306. [Google Scholar] [CrossRef]
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System Techniques in Landslide Monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Flotron, A. Movement Studies on a Hanging Glacier in Relation with an Ice Avalanche. J. Glaciol. 1977, 19, 671–672. [Google Scholar] [CrossRef]
- Bowman, D.D.; Ouillon, G.; Sammis, C.G.; Sornette, A.; Sornette, D. An Observational Test of the Critical Earthquake Concept. J. Geophys. Res. Solid Earth 1998, 103, 24359–24372. [Google Scholar] [CrossRef]
- Sornette, D.; Helmstetter, A.; Andersen, J.V.; Gluzman, S.; Grasso, J.-R.; Pisarenko, V. Towards Landslide Predictions: Two Case Studies. Phys. A Stat. Mech. Its Appl. 2004, 338, 605–632. [Google Scholar] [CrossRef]
- Amitrano, D.; Grasso, J.R.; Senfaute, G. Seismic Precursory Patterns before a Cliff Collapse and Critical Point Phenomena. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Faillettaz, J.; Pralong, A.; Funk, M.; Deichmann, N. Evidence of Log-Periodic Oscillations and Increasing Icequake Activity during the Breaking-off of Large Ice Masses. J. Glaciol. 2008, 54, 725–737. [Google Scholar] [CrossRef]
- Faillettaz, J.; Funk, M.; Vagliasindi, M. Time Forecast of a Break-off Event from a Hanging Glacier. Cryosphere 2016, 10, 1191–1200. [Google Scholar] [CrossRef]
- Asano, Y.; Uchida, T. Detailed Documentation of Dynamic Changes in Flow Depth and Surface Velocity during a Large Flood in a Steep Mountain Stream. J. Hydrol. 2016, 541, 127–135. [Google Scholar] [CrossRef]
- Zhang, G.; Cui, P.; Yin, Y.; Liu, D.; Jin, W.; Wang, H.; Yan, Y.; Ahmed, B.N.; Wang, J. Real-Time Monitoring and Estimation of the Discharge of Flash Floods in a Steep Mountain Catchment. Hydrol. Processes 2019, 33, 3195–3212. [Google Scholar] [CrossRef]
- Huggel, C.; Zgraggen-Oswald, S.; Haeberli, W.; Kääb, A.; Polkvoj, A.; Galushkin, I.; Evans, S.G. The 2002 Rock/Ice Avalanche at Kolka/Karmadon, Russian Caucasus: Assessment of Extraordinary Avalanche Formation and Mobility, and Application of QuickBird Satellite Imagery. Nat. Hazards Earth Syst. Sci. 2005, 5, 173–187. [Google Scholar] [CrossRef]
- Weertman, J. On the Sliding of Glaciers. J. Glaciol. 1957, 3, 33–38. [Google Scholar] [CrossRef]
- Huggel, C.; Haeberli, W.; Kääb, A.; Bieri, D.; Richardson, S. An Assessment Procedure for Glacial Hazards in the Swiss Alps. Can. Geotech. J. 2004, 41, 1068–1083. [Google Scholar] [CrossRef]
- Yadav, R.; Tripathi, S.K.; Pranuthi, G.; Dubey, S.K. Trend Analysis by Mann-Kendall Test for Precipitation and Temperature for Thirteen Districts of Uttarakhand. J. Agrometeorol. 2014, 16, 164. [Google Scholar]
- Barry, R.G. Mountain Weather and Climate; Routledge: London, UK, 2008. [Google Scholar]
- Faillettaz, J.; Funk, M.; Vincent, C. Avalanching Glacier Instabilities: Review on Processes and Early Warning Perspectives. Rev. Geophys. 2015, 53, 203–224. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Images | |||
| Acquisition Date | Scene ID/Band | Satellite/Sensor | Spatial Resolution (m/pixel) |
| 1 September 2015 | LC81450392015244LGN01/Panchromatic | Landsat 8/OLI | 15 |
| 17 September 2015 | LC81450392015260LGN01/Panchromatic | Landsat 8/OLI | 15 |
| 3 September 2016 | LC81450392016247LGN01/Panchromatic | Landsat 8/OLI | 15 |
| 19 September 2016 | LC81450392016263LGN01/Panchromatic | Landsat 8/OLI | 15 |
| 9 October 2016 | S2A_OPER_MSI_L1C_TL_SGS__20161009T053631_A006780_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 14 October 2017 | S2A_OPER_MSI_L1C_TL_SGS__20171014T104205_A012071_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 24 October 2018 | S2B_OPER_MSI_L1C_TL_MTI__20181024T090955_A008525_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 24 October 2019 | S2A_OPER_MSI_L1C_TL_EPAE_20191024T082325_A022653_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 18 October 2020 | S2A_OPER_MSI_L1C_TL_VGS1_20201018T072817_A027801_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 27 December 2020 | S2A_OPER_MSI_L1C_TL_EPAE_20201227T062601_A028802_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 16 January 2021 | S2A_OPER_MSI_L1C_TL_EPAE_20210116T063033_A029088_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 26 January 2021 | S2A_OPER_MSI_L2A_TL_EPAE_20210126T074559_A029231_T44RLU/B2 | Sentinel-2/MSI | 10 |
| 5 February 2021 | S2A_OPER_MSI_L2A_TL_VGS1_20210205T082130_A029374_T44RLU/B2 | Sentinel-2/MSI | 10 |
| DTM Details | |||
| Date Range for Stereopairs | Satellite | Source Link/Reference | Spatial Resolution (m/pixel) |
| 1 September 2015–5 October 2015 | WorldView-1 and WorldView-2 | [21,36,37,38] | 2 |
| 10–11 February 2021 | WorldView-2, WorldView-3 and GeoEye-1 | [21,37,39,40] | 2 |
| Correlated Pair (Represented by Acquisition Dates) | Cumulative Uncertainty (±cm/Day) |
|---|---|
| 1–17 September 2015 | 2.13 |
| 3–19 September 2016 | 1.25 |
| 17 September 2015–19 September 2016 | 1.48 |
| 9 October 2016–14 October 2017 | 1.19 |
| 14 October 2017–24 October 2018 | 1.24 |
| 24 October 2018–24 October 2019 | 1.56 |
| 24 October 2019–18 October 2020 | 1.23 |
| 27 December 2020–16 January 2021 | 2.53 |
| 16–26 January 2021 | 3.21 |
| 26 January 2021–5 February 2021 | 31.70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhardwaj, A.; Sam, L. Reconstruction and Characterisation of Past and the Most Recent Slope Failure Events at the 2021 Rock-Ice Avalanche Site in Chamoli, Indian Himalaya. Remote Sens. 2022, 14, 949. https://doi.org/10.3390/rs14040949
Bhardwaj A, Sam L. Reconstruction and Characterisation of Past and the Most Recent Slope Failure Events at the 2021 Rock-Ice Avalanche Site in Chamoli, Indian Himalaya. Remote Sensing. 2022; 14(4):949. https://doi.org/10.3390/rs14040949
Chicago/Turabian StyleBhardwaj, Anshuman, and Lydia Sam. 2022. "Reconstruction and Characterisation of Past and the Most Recent Slope Failure Events at the 2021 Rock-Ice Avalanche Site in Chamoli, Indian Himalaya" Remote Sensing 14, no. 4: 949. https://doi.org/10.3390/rs14040949
APA StyleBhardwaj, A., & Sam, L. (2022). Reconstruction and Characterisation of Past and the Most Recent Slope Failure Events at the 2021 Rock-Ice Avalanche Site in Chamoli, Indian Himalaya. Remote Sensing, 14(4), 949. https://doi.org/10.3390/rs14040949