
A GDOP-Based Performance Description of TOA Localization with Uncertain Measurements



Abstract
:1. Introduction
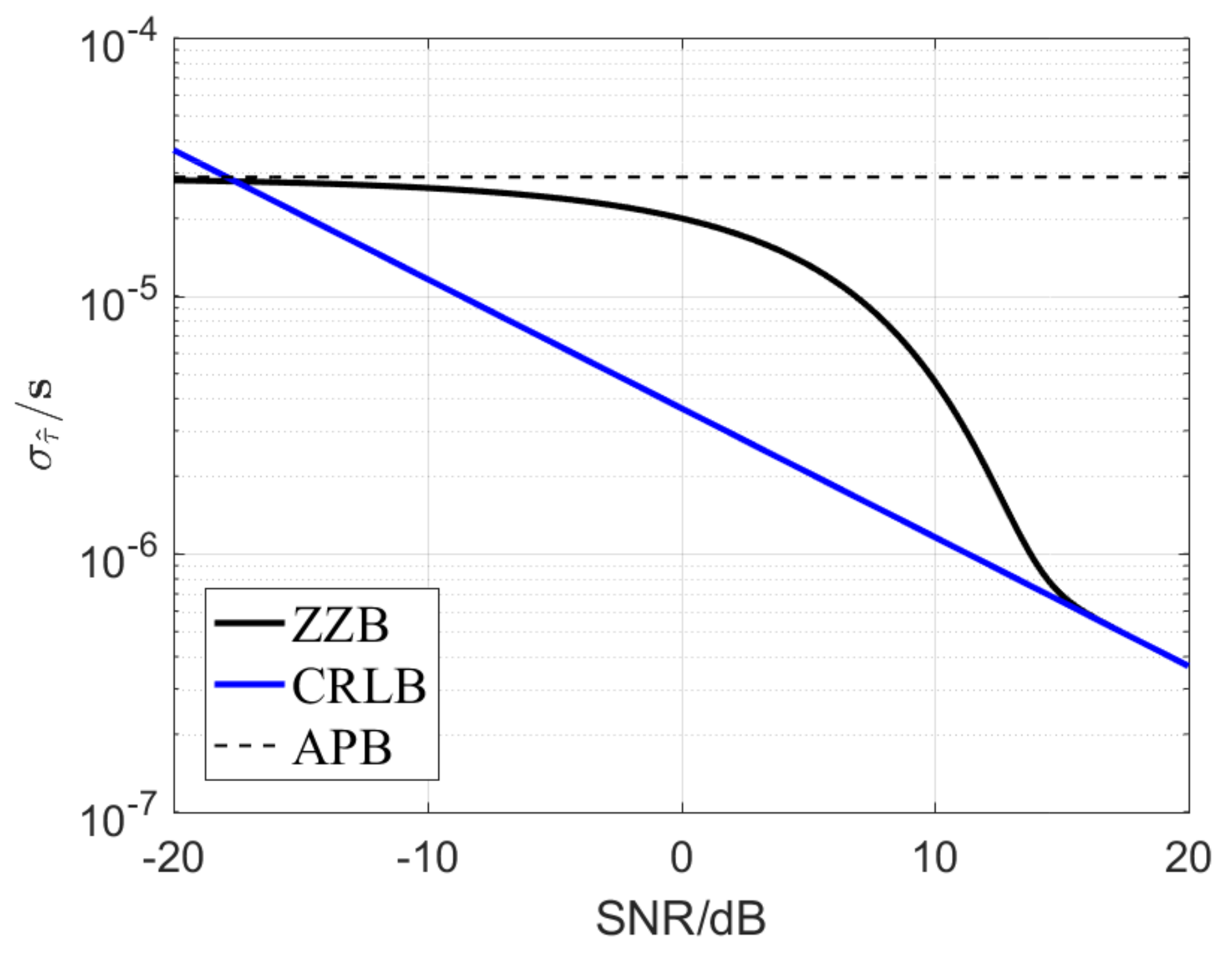
- To adapt the uncertainty of signal detection, considering the fact that the actual detection probability of a target is always less than 1, we establish the first TDM model under uncertain measurements to describe the TOA localization process more accurately. To adapt the uncertainty of TDM estimation in low SNR, we propose a modified performance bound for TDM estimation by introducing the Ziv-Zakai bound (ZZB).
- By considering the effect of detection and estimation on the subsequent TOA localization, we combine the detection and localization performance via the probabilities under different detection results and further propose a novel geometric dilution of precision with uncertain measurements (GDOP-UM) metric for localization performance analysis of actual applications.
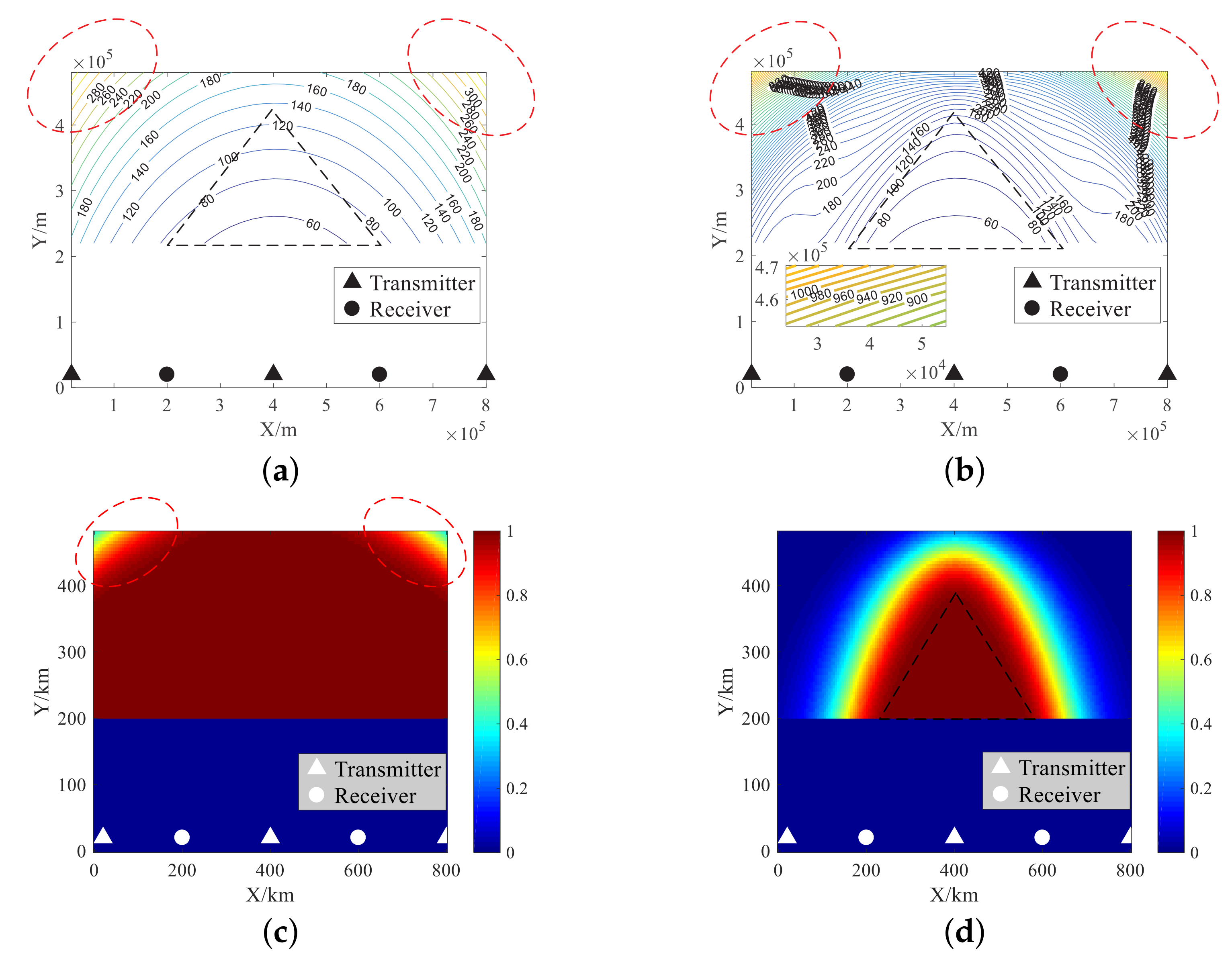
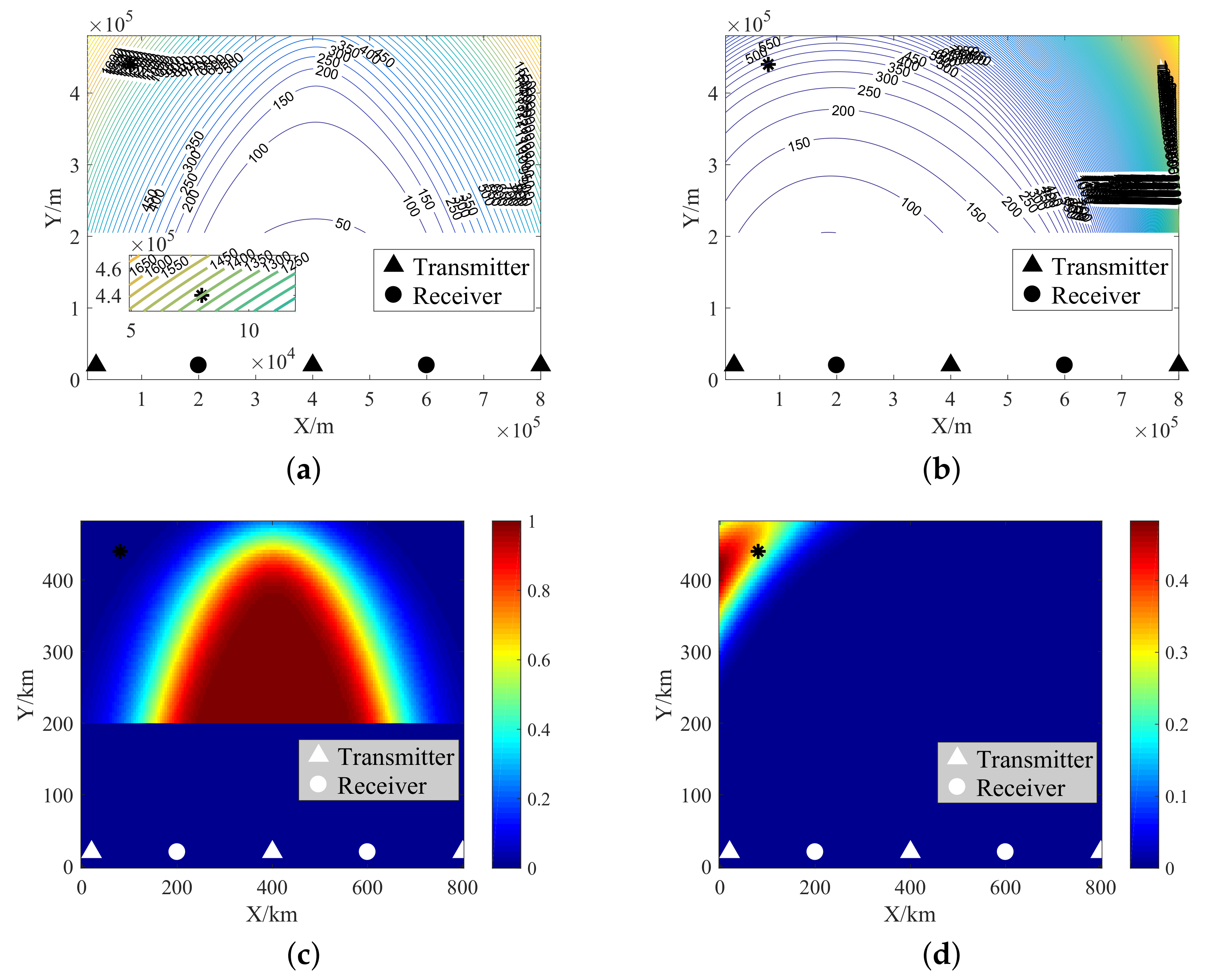
- To verify the reasonability and accuracy of the proposed GDOP-UM metric, elaborate simulations are performed and analyzed under a fixed-node-position scenario. Moreover, we perform simulations under an unfixed-node-position scenario for a typical geometric optimization application, namely, optimizing the system localization performance by adjusting the node positions. The simulations also show the accuracy and applicability of the GDOP-UM metric.
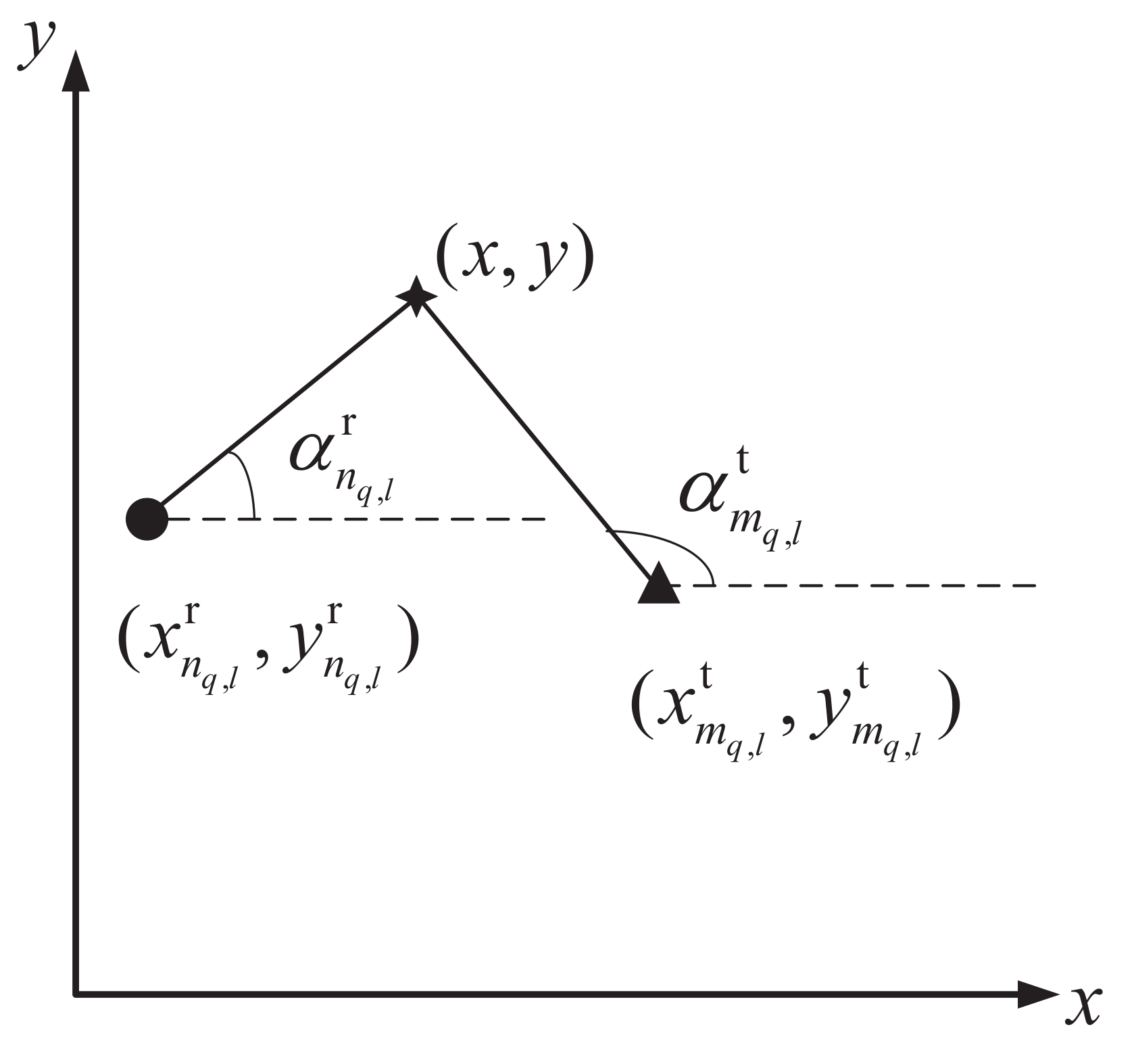
2. Mathematical Model
3. Localization Measurements with Detection Uncertainty
4. GDOP with Uncertain Measurements for MSRSs
| Algorithm 1 Realization of the GDOP-UM Metric. |
|
Initialize the radar positions and the target position ; Initialize the summation of with as ; Initialize the value of GDOP-UM as ; for do if then Calculate the occurrence probability of the detection sequence , , according to (13); ; else Break; end if end for for do if then Calculate the GDOP-like value corresponding to the detection sequence according to (23), (24), (25) and (33); Calculate the normalized probability of the detection sequence , , according to (35); ; else Break; end if end for Output as the final value of the GDOP-UM. |
5. Numerical Results
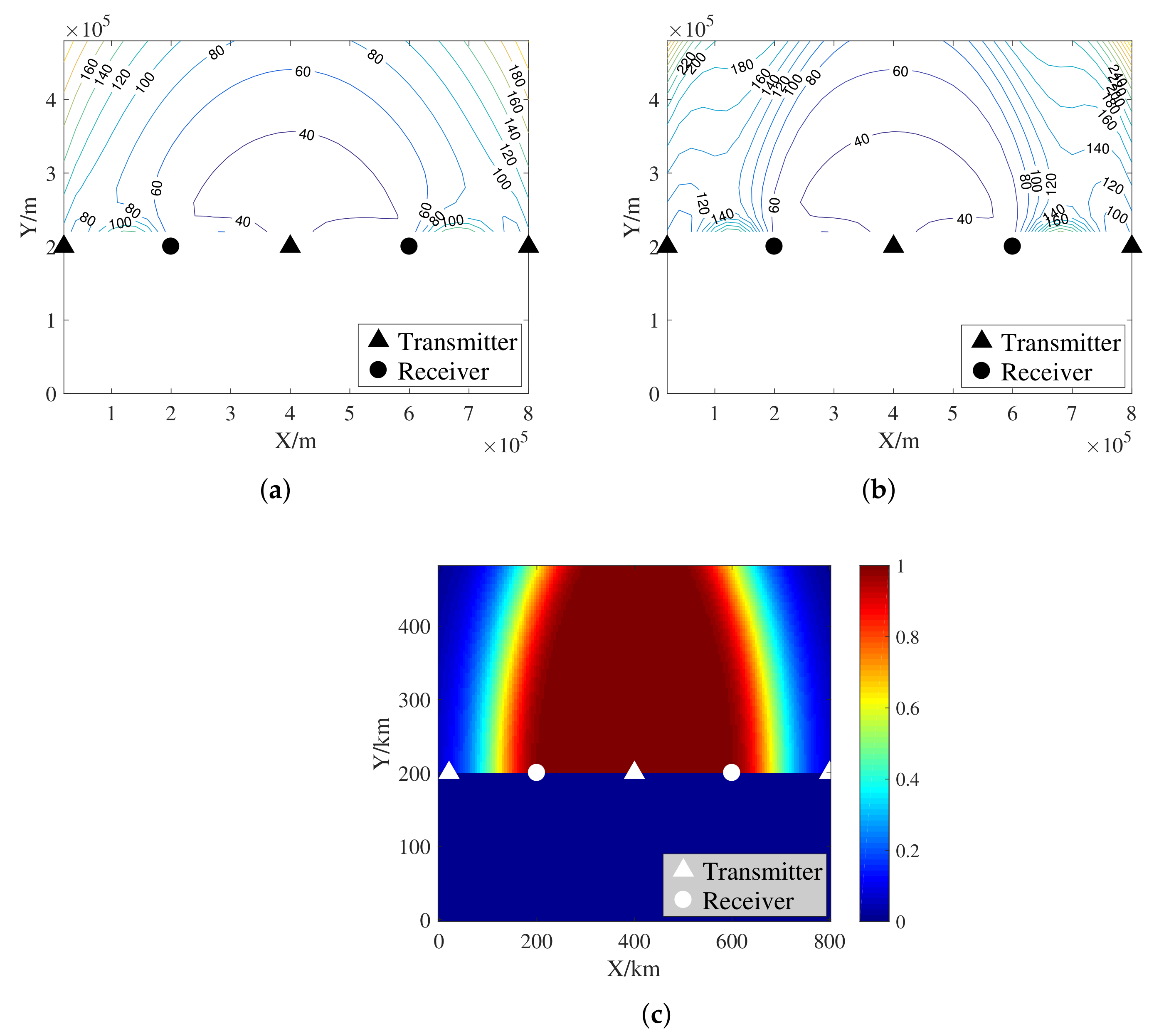
5.1. Fixed Node Positions
5.1.1. Linearly Placed Away from the RMA
5.1.2. Linearly Placed near the RMA
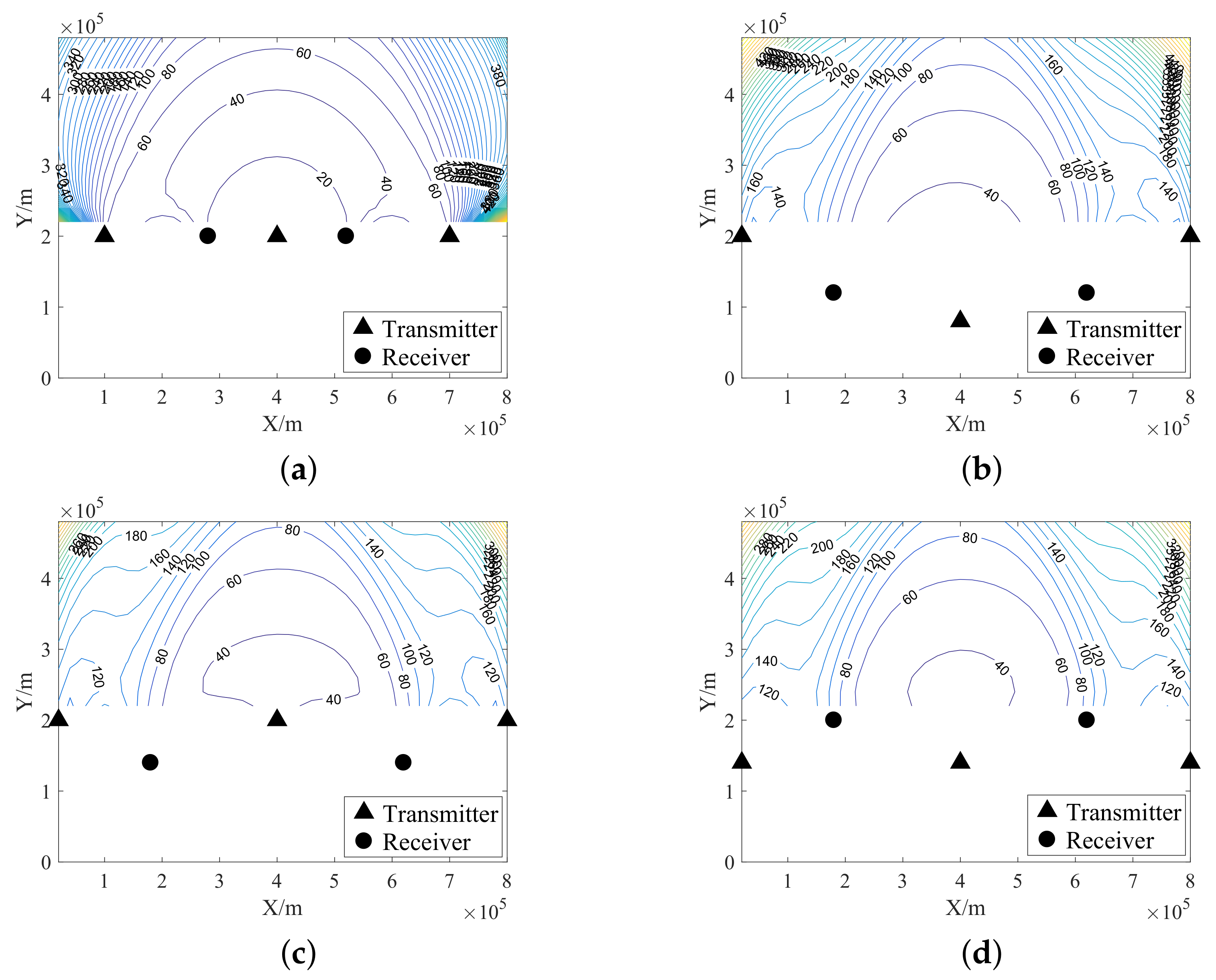
5.1.3. Some Other Node Placement Schemes
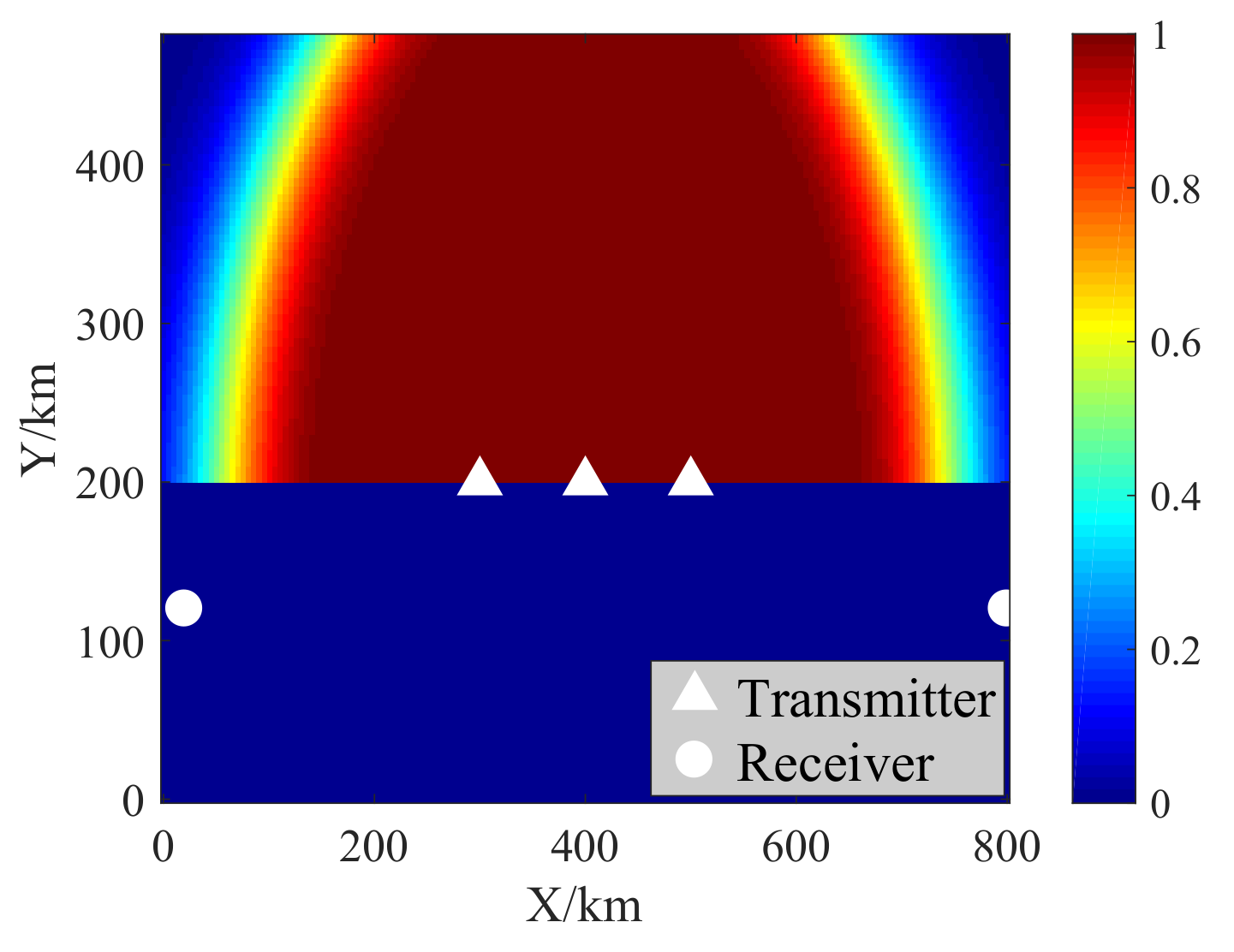
5.2. Unfixed Node Positions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| MSRS | Multisite radar system |
| TOA | Time-of-arrival |
| CRLB | Cramér–Rao lower bound |
| GDOP | Geometric dilution of precision |
| TDM | Time delay measurement |
| SNR | Signal-to-noise ratio |
| T-GDOP | Traditional GDOP |
| ZZB | Ziv–Zakai bound |
| GDOP-UM | GDOP with uncertain measurements |
| CD | Complete detection |
| ED | Effective detection |
| APB | A priori bound |
| RMA | Radar mission area |
| RPA | Radar placement area |
| m | Index of transmitter |
| n | Index of receiver |
| l | Index of detection sequence |
| The lth possible detection sequence | |
| Number of available TDMs for all T-R channels | |
| Effectively detected TDM vector | |
| Localization error covariance matrix | |
| Standard deviation of error for the TDM | |
| The GDOP-like value corresponding to | |
| GDOP-UM metric |
References
- Chernyak, V.S. Fundamentals of Multisite Radar Systems: Multistatic Radars and Multistatic Radar Systems; Gordon and Breach: New York, NY, USA, 1998. [Google Scholar]
- Yoon, Y.; Kim, Y. An efficient genetic algorithm for maximum coverage deployment in wireless sensor networks. IEEE Trans. Cybern. 2013, 43, 1473–1483. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.S.; Cimini, L.J.; Chizhik, D.; Valenzuela, R.A. Spatial diversity in radars–Models and detection performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Shi, C.; Qiu, W.; Wang, F.; Salous, S.; Zhou, J. Power control scheme for spectral coexisting multistatic radar and massive MIMO communication systems under uncertainties: A robust Stackelberg game model. Signal Process. 2019, 94, 146–155. [Google Scholar] [CrossRef]
- Friedlander, B. On the relationship between MIMO and SIMO radars. IEEE Trans. Signal Process. 2009, 57, 394–398. [Google Scholar] [CrossRef]
- D’Addio, E.; Farina, A. Overview of detection theory on multistatic radars. IET Proc.—Commun. Radar Signal Process. 1986, 133, 613–623. [Google Scholar] [CrossRef]
- Tajer, A.; Jajamovich, G.H.; Wang, X.; Moustakides, G.V. Optimal joint target detection and parameter estimation by MIMO radar. IEEE J. Sel. Top. Signal Process. 2010, 4, 127–145. [Google Scholar] [CrossRef] [Green Version]
- Skolnik, M.I. Radar Handbook, 3rd ed.; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Yan, J.; Liu, H.; Bao, Z. Power allocation scheme for target tracking in clutter with multiple radar system. Signal Process. 2018, 144, 453–458. [Google Scholar] [CrossRef]
- Gorji, A.A.; Tharmarasa, R.; Kirubarajan, T. Widely separated MIMO versus multistatic radars for target localization and tracking. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2179–2194. [Google Scholar] [CrossRef]
- Bekkerman, I.; Tabrikian, J. Target detection and localization using MIMO radars and sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Optimal geometry analysis for multistatic TOA localization. IEEE Trans. Signal Process. 2016, 64, 4180–4193. [Google Scholar] [CrossRef]
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target localization accuracy gain in MIMO radar-based systems. IEEE Trans. Inf. Theory 2010, 56, 2783–2803. [Google Scholar] [CrossRef] [Green Version]
- Khan, U.F.; Lazaridis, P.I.; Mohamed, H.; Albarracín, R.; Zaharis, Z.D.; Atkinson, R.C.; Tachtatzis, C.; Glover, I.A. An efficient algorithm for partial discharge localization in high-voltage systems using received signal strength. Sensors 2018, 18, 4000. [Google Scholar] [CrossRef] [Green Version]
- Radmard, M.; Chitgarha, M.M.; Majd, M.N.; Nayebi, M.M. Antenna placement and power allocation optimization in MIMO detection. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1468–1478. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, S.; Zhou, T.; Li, N. Geometric optimization of distributed MIMO radar systems with spatial distance constraints. IEEE Access 2020, 8, 199227–199241. [Google Scholar] [CrossRef]
- Wang, Y.; Yi, W.; Kong, L. Antenna placement for distributed MIMO radar with different missions in different subareas. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar]
- Yi, W.; Yuan, Y.; Hoseinnezhad, R.; Kong, L. Resource scheduling for distributed multi-target tracking in netted colocated MIMO radar systems. IEEE Trans. Signal Process. 2020, 68, 1602–1617. [Google Scholar] [CrossRef]
- Yuan, Y.; Yi, W.; Hoseinnezhad, R.; Varshney, P.K. Robust power allocation for resource-aware multi-target tracking with colocated MIMO radars. IEEE Trans. Signal Process. 2020, 69, 443–458. [Google Scholar] [CrossRef]
- Zhou, T.; Yi, W.; Kong, L. Non-Cooperative passive direct localization based on waveform estimation. Remote Sens. 2021, 13, 264. [Google Scholar] [CrossRef]
- Zheng, H.; Jiu, H.; Li, H.; Liu, H. Joint design of the transmit beampattern and angular waveform for colocated MIMO radar under a constant modulus constraint. Remote Sens. 2021, 13, 3392. [Google Scholar] [CrossRef]
- Sun, B.; Chen, H.; Yang, D.; Li, X. Antenna selection and placement analysis of MIMO radar networks for target localization. Int. J. Distrib. Sens. Netw. 2014, 10, 769404. [Google Scholar] [CrossRef]
- Yarlagadda, R.; Ali, I.; Al-Dhahir, N.; Hershey, J. GPS GDOP metric. IEE Proc.-Radar Sonar Navig. 2000, 147, 259–264. [Google Scholar] [CrossRef]
- Langley, R.B. Dilution of precision. GPS World 1999, 10, 52–59. [Google Scholar]
- Dianat, M.; Taban, M.R.; Dianat, J.; Sedighi, V. Target localization using least squares estimation for MIMO radars with widely separated antennas. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2730–2741. [Google Scholar] [CrossRef]
- Yin, C.; Xu, S.; Wang, D. Location accuracy of multistatic radars (TR/sup n/) based on ranging information. In Proceedings of the International Radar Conference, Beijing, China, 8–10 October 1996; pp. 34–38. [Google Scholar]
- Lackpour, A.; Proska, K. GOMERS: Genetic optimization of a multistatic extended radar system. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Yang, Y.; Yi, W.; Zhang, T.; Cui, G.; Kong, L.; Yang, X. Antenna placement of multistatic radar system with detection and localization performance. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 620–625. [Google Scholar]
- Kilani, M.; Gagnon, G.; Gagnon, F. Multistatic radar placement optimization for cooperative radar-communication systems. IEEE Commun. Lett. 2018, 22, 1576–1579. [Google Scholar] [CrossRef]
- Liang, J.; Huan, M.; Deng, M.; Bao, M.; Wang, G. Optimal transmitter and receiver placement for localizing 2D interested-region target with constrained sensor regions. Signal Process. 2021, 183, 108032. [Google Scholar] [CrossRef]
- Richards, M.A. Fundamentals of Radar Signal Processing; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Richards, M.A.; Scheer, J.A.; Holm, W.A. Principles of Modern Radar: Basic Principles; Scitech: New York, NY, USA, 2010. [Google Scholar]
- Farina, A.; Ristic, B.; Timmoneri, L. Cramer-Rao bound for nonlinear filtering with Pd< 1 and its application to target tracking. IEEE Trans. Signal Process. 2002, 50, 1916–1924. [Google Scholar]
- Hernandez, M.; Ristic, B.; Farina, A.; Timmoneri, L. A comparison of two Crame/spl acute/r-Rao bounds for nonlinear filtering with P/sub d/<1. IEEE Trans. Signal Process. 2004, 52, 2361–2370. [Google Scholar]
- Anastasio, V.; Colone, F.; Lallo, A.; Farina, A.; Gumiero, F.; Lombardo, P. Optimization of multistatic passive radar geometry based on CRLB with uncertain observations. In Proceedings of the 7th European Radar Conference, Paris, France, 30 September–1 October 2010; pp. 340–343. [Google Scholar]
- Anastasio, V.; Farina, A.; Colone, F.; Lombardo, P. Cramér-Rao lower bound with pd< 1 for target localisation accuracy in multistatic passive radar. IET Radar Sonar Navig. 2014, 8, 767–775. [Google Scholar]
- Niu, C.; Zhang, Y.; Guo, J. Pareto optimal layout of multistatic radar. Signal Process. 2018, 142, 152–156. [Google Scholar] [CrossRef]
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target localisation techniques and tools for multiple-input multiple-output radar. IET Radar Sonar Navig. 2009, 3, 314–327. [Google Scholar] [CrossRef]
- Li, J.; Wu, R. An efficient algorithm for time delay estimation. IEEE Trans. Signal Process. 1998, 46, 2231–2235. [Google Scholar] [CrossRef]
- Cui, G.; DeMaio, A.; Piezzo, M. Performance prediction of the incoherent radar detector for correlated generalized Swerling-chi fluctuating targets. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 356–368. [Google Scholar] [CrossRef]
- Bell, K.L.; Steinberg, Y.; Ephraim, Y.; Trees, H.L.V. Extended Ziv–Zakai lower bound for vector parameter estimation. IEEE Trans. Inf. Theory 1997, 43, 624–637. [Google Scholar] [CrossRef]
- Shi, C.; Wang, F.; Salous, S.; Zhou, J. Joint transmitter selection and resource management strategy based on low probability of intercept optimization for distributed radar networks. Radio Sci. 2018, 53, 1108–1134. [Google Scholar] [CrossRef]
- Wang, Y.; Yi, W.; Yang, S.; Mallick, M.; Kong, L. Antenna placement algorithm for distributed MIMO radar with distance constrains. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| 120 dBW | |
| 10 dB | |
| 3 m | |
| 1 s | |
| 1 | |
| 1 | |
| k | |
| 290 K | |
| B | 150 kHz |
| 10 dB | |
| 10 dB | |
| 50 s |
| The Type of Operation | Flops | |
|---|---|---|
| GDOP-UM | T-GDOP | |
| Addition | ||
| Subtraction | ||
| Multiplication | ||
| Division | ||
| Detection Sequences | Occurrence Probabilities | Values of for GDOP-UM |
|---|---|---|
| m | ||
| m | ||
| m | ||
| m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhou, T.; Yi, W.; Kong, L. A GDOP-Based Performance Description of TOA Localization with Uncertain Measurements. Remote Sens. 2022, 14, 910. https://doi.org/10.3390/rs14040910
Wang Y, Zhou T, Yi W, Kong L. A GDOP-Based Performance Description of TOA Localization with Uncertain Measurements. Remote Sensing. 2022; 14(4):910. https://doi.org/10.3390/rs14040910
Chicago/Turabian StyleWang, Yao, Tao Zhou, Wei Yi, and Lingjiang Kong. 2022. "A GDOP-Based Performance Description of TOA Localization with Uncertain Measurements" Remote Sensing 14, no. 4: 910. https://doi.org/10.3390/rs14040910
APA StyleWang, Y., Zhou, T., Yi, W., & Kong, L. (2022). A GDOP-Based Performance Description of TOA Localization with Uncertain Measurements. Remote Sensing, 14(4), 910. https://doi.org/10.3390/rs14040910