

Using UAV Photogrammetry and Automated Sensors to Assess Aquifer Recharge from a Coastal Wetland

 ,
,  ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
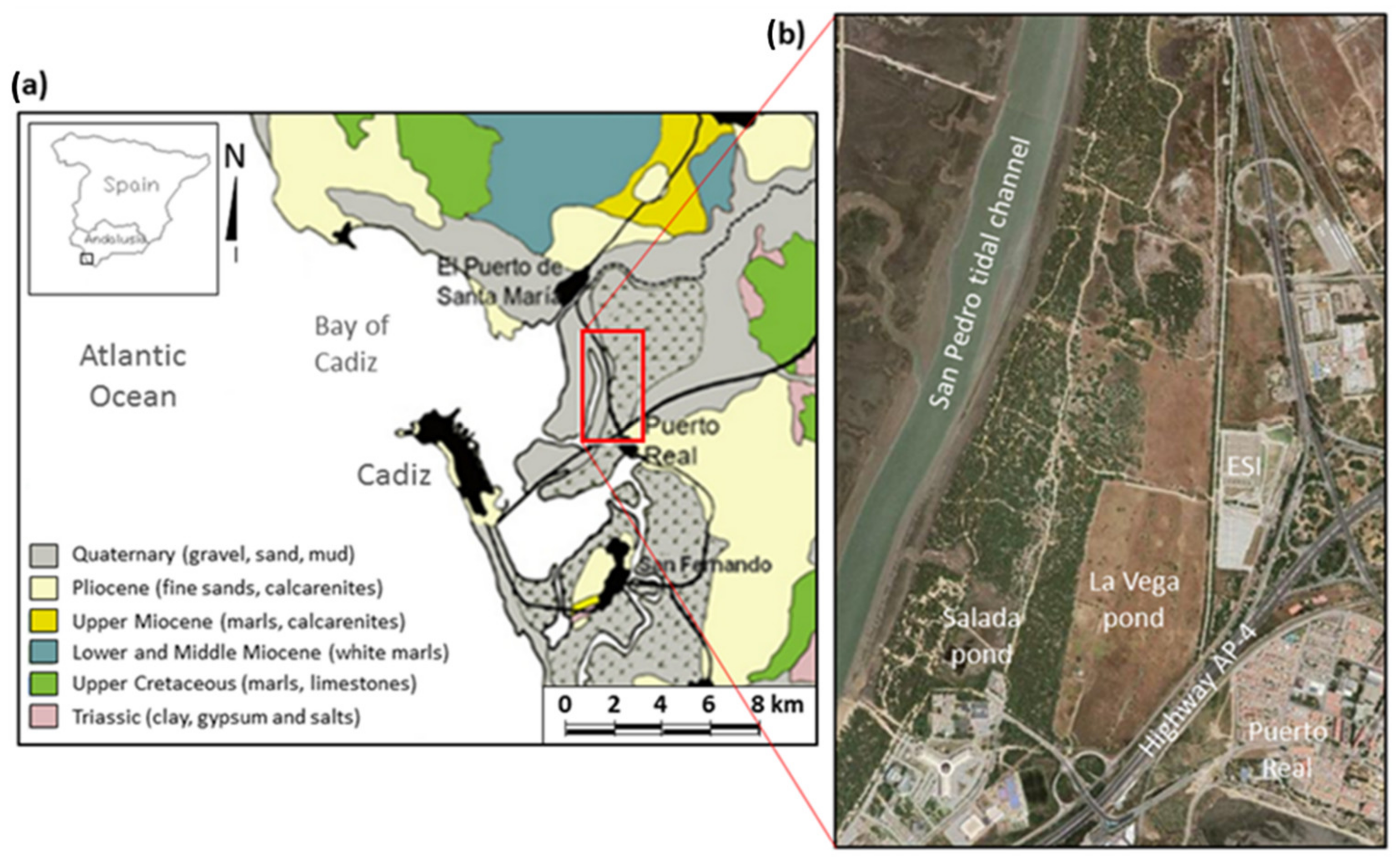
2. Characterization of the Study Area
2.1. Geology
2.2. Soils
2.3. Environmental Values
3. Materials and Methods
3.1. Estimation of Meteorological Variables
3.2. UAV Photogrammetry
3.2.1. Data Acquisition
3.2.2. Photogrammetric Processing and Accuracy Assessment
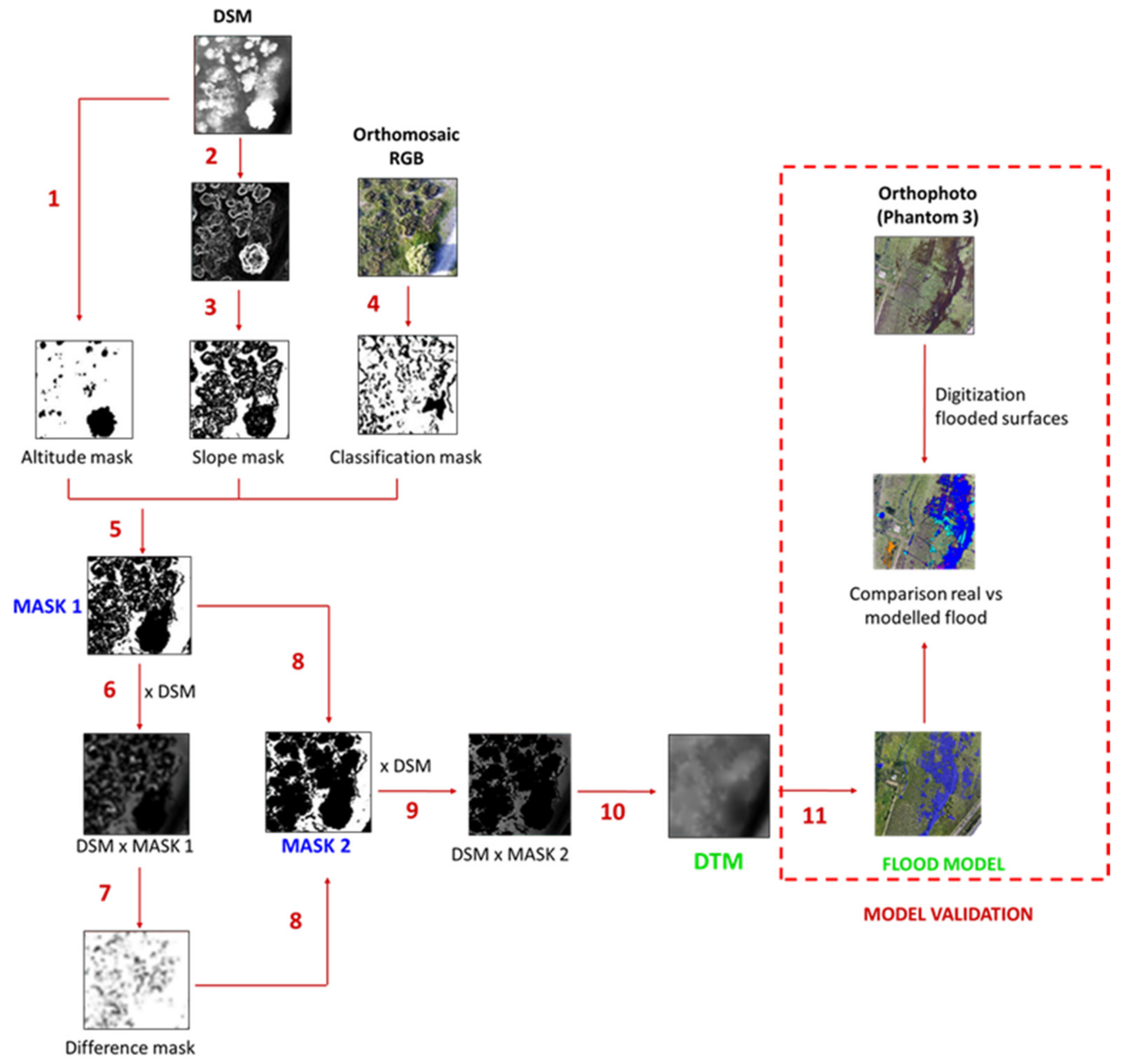
3.2.3. Post-Processing
- Vi: volume between elevation i and i−1.
- Ai: number of pixels with elevation ≤ i (obtained from the histogram) multiplied by the area of each cell.
- Ai−1: number of pixels with elevation ≤ i − 1 (obtained from the histogram) multiplied by the area of each cell.
- h: Difference of elevation between i and i − 1.
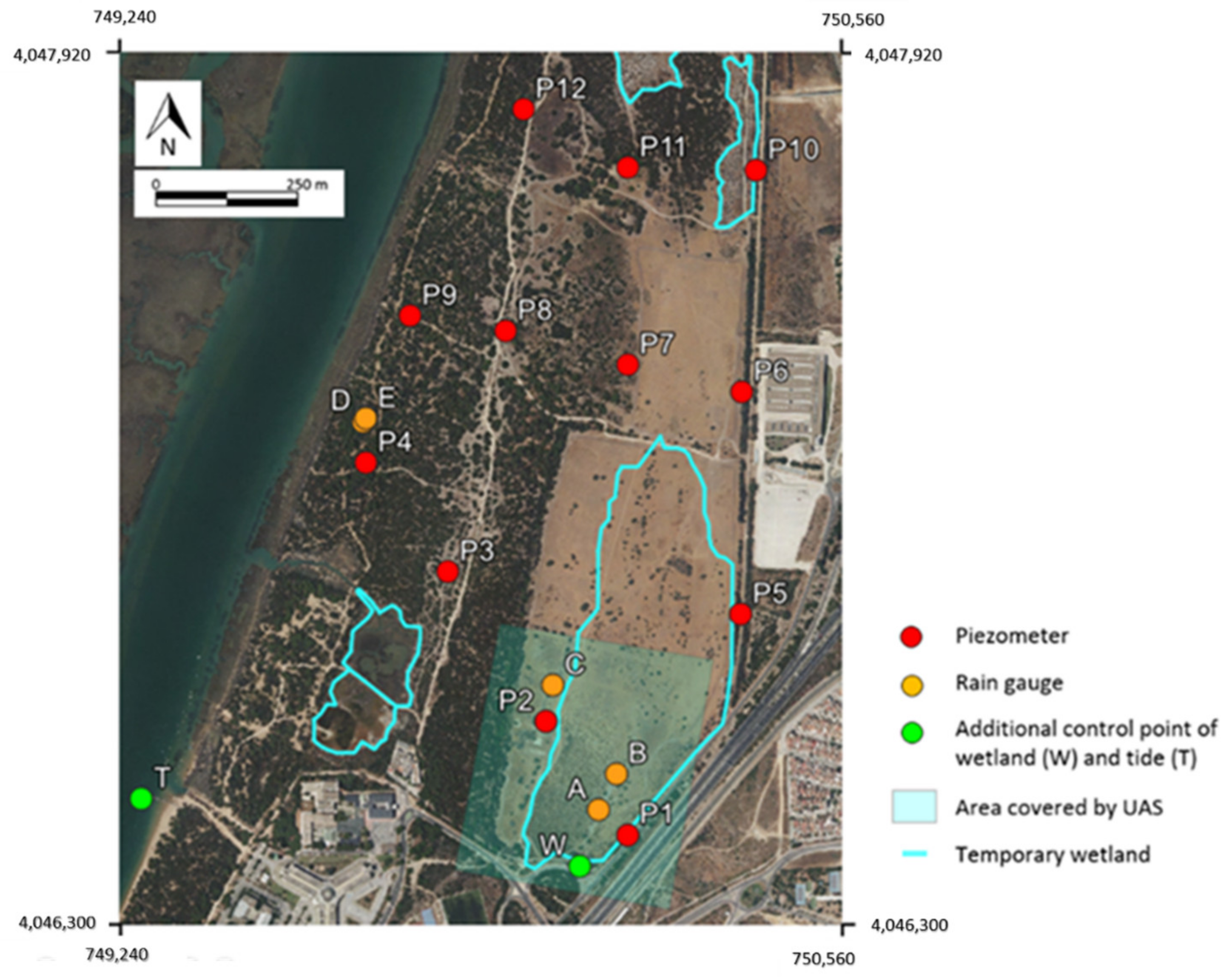
3.3. Hydrological Monitoring Network
3.4. Budget Adjustment and Estimation of Pond–Aquifer Transfers
- Infi: Infiltration volume on day “i” (m3).
- Pi: Precipitation on day “i” (m).
- Ai: Flooded area on day “i” (m2).
- DVi: Volume stored on day “i” minus the volume stored on day “i − 1” (in m3).
- Evi: Evaporation on day “i” (m).
4. Results and Discussion
4.1. Validation of the Photogrammetry-Derived Flood Model
4.2. Analysis of the Tidal Influence on the Aquifer
- (i)
- Small oscillations of the piezometric level (<2 cm) caused by semi-diurnal tidal cycles. These oscillations display certain delay with respect to the low tide. Such delay varies depending on tide amplitude and the previous history, and may even occur during high tides, as happened on December 2 and 3 of 2015. The low amplitude of these oscillations is justified by the low transmissivity of the aquifer. Such low transmissivity is the result of the thin saturated zone (whose thickness was estimated at about 3.5 m through geotechnical surveys in the study area) and the low permeability of the materials, which was estimated in laboratory at 3.3 m/day for fine sands with silt and clay contents <7.5%. These data are consistent with the results of a low-flow injection test (0.08 l/s) under transient regime carried out by the authors on the piezometer P4, which displayed a transmissivity of 15 m/day.
- (ii)
- The stabilization of the piezometric levels owing to spring tides, which makes the aforementioned general downward trend to cease. This phenomenon produces a low frequency oscillation (twice a month approximately) with an estimated amplitude of around 3 cm on the piezometric level. This can be explained by the inversion of hydraulic gradients during the part of the tidal cycle when the water stage in the channel is above the piezometric level, forcing a flux of seawater towards the aquifer. These inputs would compensate over several days the aquifer´s discharge towards the tidal channel when the tide level is below the piezometric level. When neap tides occur again, the piezometric level shows a downward trend with certain delay that evidences discharge into the tidal channel. Therefore, there is a discontinuous entry of seawater that constitutes a saline input into the coastal sector of the aquifer when the piezometric levels are significantly below the high spring tides.
4.3. Estimation of Groundwater Recharge from the Pond
5. Applicability of the Method, Limitations and Future Research
6. Conclusions
- The understanding of the hydrogeological and topographical context is critical to define groundwater–surface water interactions and the dynamics of seasonal water bodies. In this regard, the DTM obtained through SfM and ground-filtering treatments provided an accurate representation of the basin morphology with a cell size of 6.9 cm and a RMSEz of 5.9 cm. This product combined with water stage records at 10-min intervals, enabled to calculate pond´s stage and volume stored, as well as estimating the balance between water inputs and outputs over a rainy period of 70 days.
- A detailed hydrological analysis requires in situ precipitation records over the studied system since rainfall episodes display high spatial heterogeneity in narrow time windows. In fact, the correlation between the daily rainfall collected in the pond´s rain gauge network and that from the meteorological station located 6 km from the study area was weak.
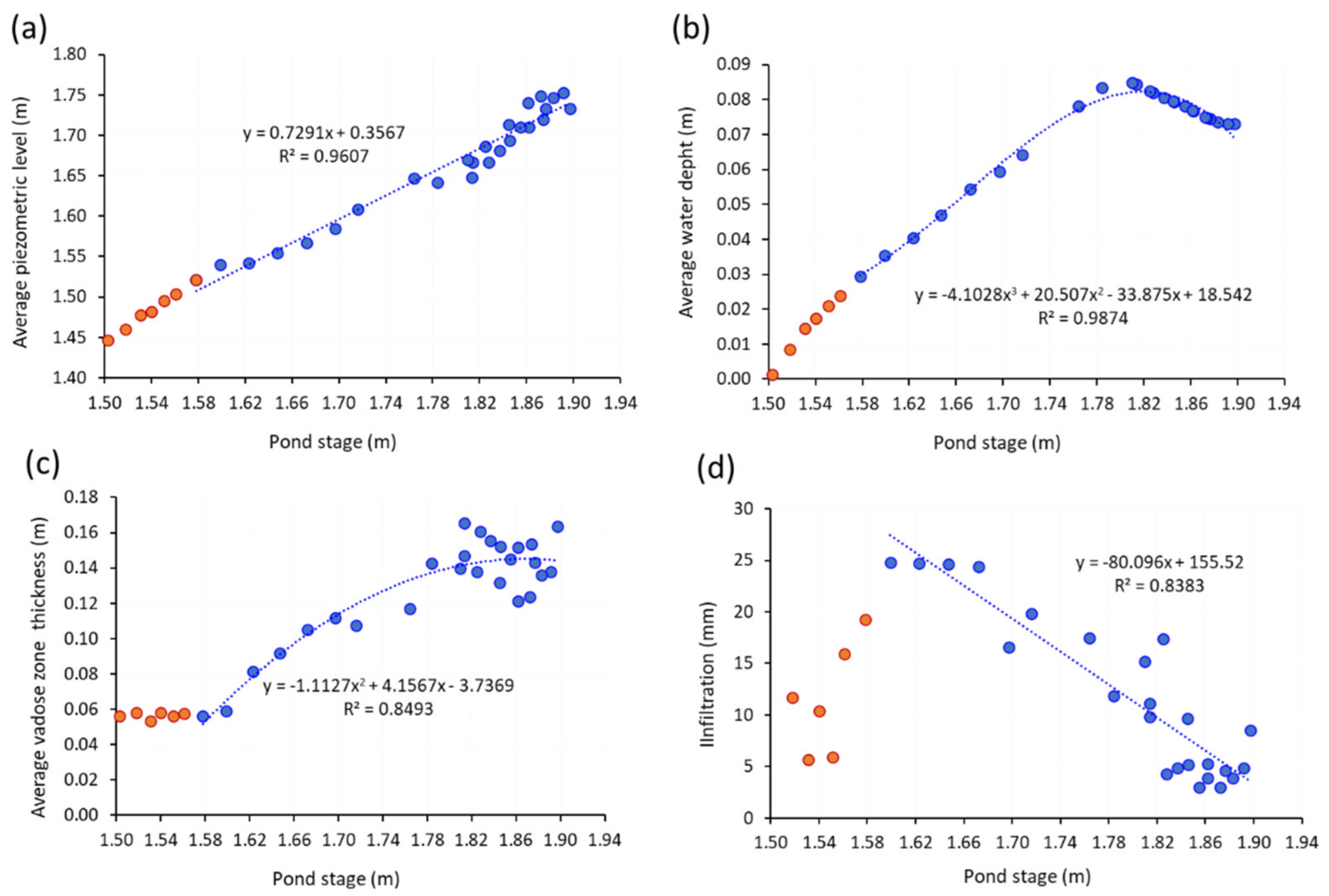
- In this case study, the variable “pond stage” determines the variability of the infiltration rate over time. An empirical law was established between the infiltration rate and the hydrological variable with which the correlation is better: the water stage. This relationship enables us to calculate the infiltration rate under hydrological conditions that do not allow its determination by means of a water balance.
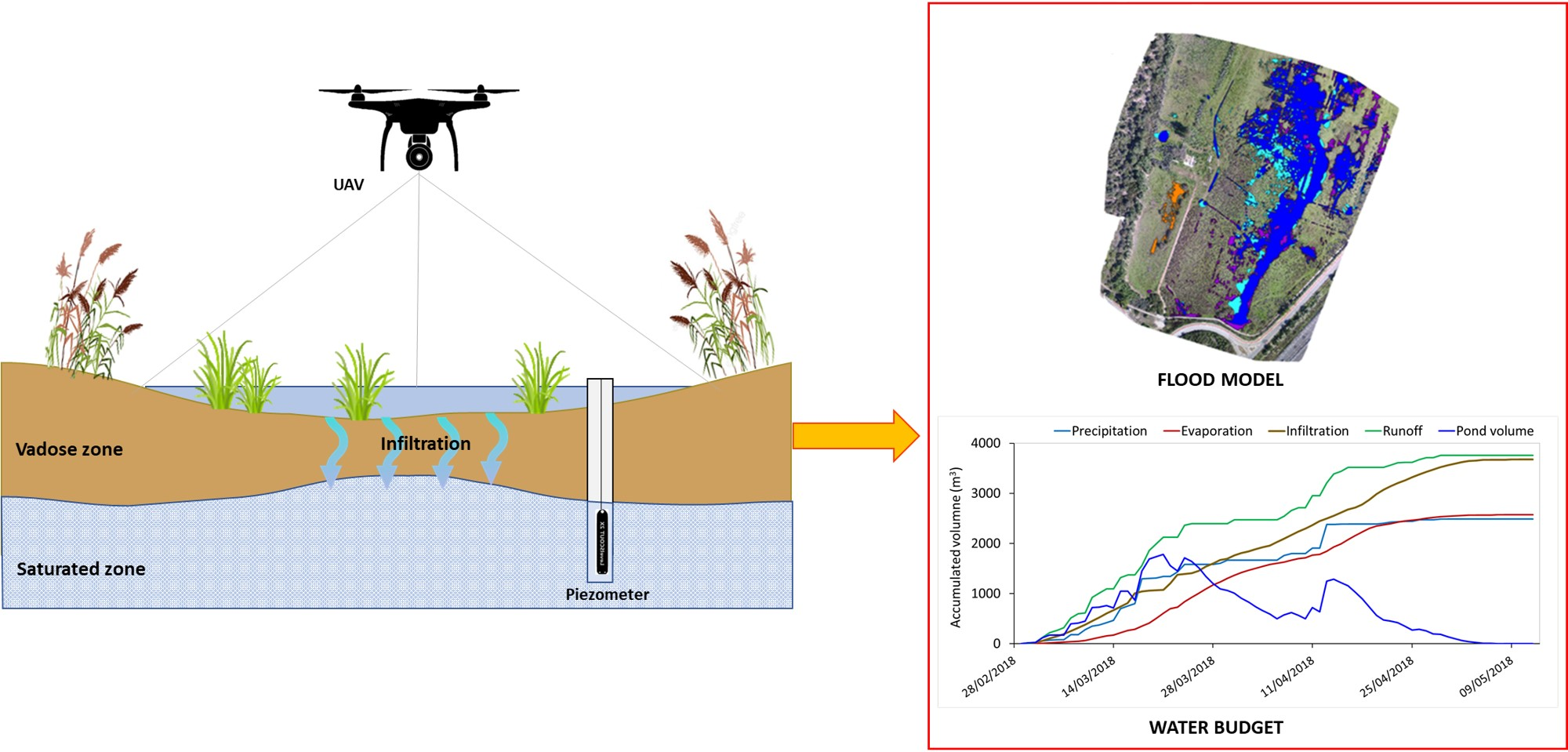
- The application of the proposed methodology has enabled us to quantify the elements of the water budget. During the study period, inflows into the pond accounted for 6200 m3 approximately, of which 40% corresponded to direct precipitation over the pond and 60% to surface runoff. Outputs equalled the inputs, with 41% attributable to direct evaporation from water surface and 59% to transfers into the aquifer.
- The precise definition of the local datum is fundamental to define the marine influence on the aquifer–wetland system, underground flows and flooding during spring tides or storms.
- The proposed methodology constitutes an efficient and economical alternative for elucidating and monitoring the functioning of complex groundwater–surface water systems located in similar hydrological contexts, where high spatial and temporal resolutions are required.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Salimi, S.; Almuktar, S.A.; Scholz, M. Impact of climate change on wetland ecosystems: A critical review of experimental wetlands. J. Environ. Manag. 2021, 286, 112160. [Google Scholar] [CrossRef] [PubMed]
- Janse, J.H.; van Dam, A.A.; Hes, E.M.; de Klein, J.J.; Finlayson, C.M.; Janssen, A.B.; van Wijk, D.; Mooij, W.; Verhoeven, J.T. Towards a global model for wetlands ecosystem services. Curr. Opin. Environ. Sustain. 2018, 36, 11–19. [Google Scholar] [CrossRef]
- Banerjee, O.; Crossman, N.D.; De Groot, R.S. Ecological Processes, Functions and Ecosystem Services: Inextricable Linkages between Wetlands and Agricultural Systems. In Ecosystem Services in Agricultural and Urban Landscapes, 1st ed.; Wratten, S., Sandhu, H., Cullen, R., Costanza, R., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Mitsch, W.J.; Bernal, B.; Hernandez, M.E. Ecosystem services of wetlands. Int. J. Biodivers. Sci. Ecosyst. Serv. Manag. 2015, 11, 1–4. [Google Scholar] [CrossRef]
- Zedler, J.B.; Kercher, S. WETLAND RESOURCES: Status, Trends, Ecosystem Services, and Restorability. Annu. Rev. Environ. Resour. 2005, 30, 39–74. [Google Scholar] [CrossRef]
- Ramsar Convention Secretariat. The Ramsar Convention Manual: A Guide to the Convention on Wetlands (Ramsar, Iran, 1971), 6th ed.; Ramsar Convention Secretariat: Gland, Switzerland, 2013. [Google Scholar]
- Council Directive 92/43/EEC of 21 May 1992 on the Conservation of Natural Habitats and of Wild Fauna and Flora. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A31992L0043 (accessed on 15 July 2022).
- 93/626/EEC: Council Decision of 25 October 1993 Concerning the Conclusion of the Convention on Biological Diversity. Available online: https://www.eumonitor.eu/9353000/1/j9vvik7m1c3gyxp/vitgbghrkszt (accessed on 15 July 2022).
- Directive 2000/60/EC of the European Parliament and of the Council Establishing a Framework for the Community Action in the Field of Water Policy. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A32000L0060 (accessed on 15 July 2022).
- Gumiero, B.; Mant, J.; Hein, T.; Elso, J.; Boz, B. Linking the restoration of rivers and riparian zones/wetlands in Europe: Sharing knowledge through case studies. Ecol. Eng. 2013, 56, 36–50. [Google Scholar] [CrossRef]
- Staszak, L.A.; Armitage, A.R. Evaluating Salt Marsh Restoration Success with an Index of Ecosystem Integrity. J. Coast. Res. 2013, 287, 410–418. [Google Scholar] [CrossRef]
- Sullivan, P.L.; Gaiser, E.; Surratt, D.; Rudnick, D.T.; Davis, S.E.; Sklar, F.H. Wetland Ecosystem Response to Hydrologic Restoration and Management: The Everglades and its Urban-Agricultural Boundary (FL, USA). Wetlands 2014, 34, 1–8. [Google Scholar] [CrossRef]
- Davidson, N.C. How much wetland has the world lost? Long-term and recent trends in global wetland area. Mar. Freshw. Res. 2014, 65, 934–941. [Google Scholar] [CrossRef]
- Spencer, T.; Schuerch, M.; Nicholls, R.J.; Hinkel, J.; Lincke, D.; Vafeidis, A.; Reef, R.; McFadden, L.; Brown, S. Global coastal wetland change under sea-level rise and related stresses: The DIVA Wetland Change Model. Glob. Planet. Change 2016, 139, 15–30. [Google Scholar] [CrossRef]
- Manzoni, S.; Maneas, G.; Scaini, A.; Psiloglou, B.E.; Destouni, G.; Lyon, S.W. Understanding coastal wetland conditions and futures by closing their hydrologic balance: The case of the Gialova lagoon, Greece. Hydrol. Earth Syst. Sci. 2020, 24, 3557–3571. [Google Scholar] [CrossRef]
- Borji, M.; Malekian, A.; Salajegheh, A.; Ghadimi, M. Multi-time-scale analysis of hydrological drought forecasting using support vector regression (SVR) and artificial neural networks (ANN). Arab. J. Geosci. 2016, 9, 725. [Google Scholar] [CrossRef]
- Lowe, K.; Castley, J.G.; Hero, J.-M. Resilience to climate change: Complex relationships among wetland hydroperiod, larval amphibians and aquatic predators in temporary wetlands. Mar. Freshw. Res. 2015, 66, 886–899. [Google Scholar] [CrossRef]
- Zhang, L.; Thomas, S.; Mitsch, W.J. Design of real-time and long-term hydrologic and water quality wetland monitoring stations in South Florida, USA. Ecol. Eng. 2017, 108, 446–455. [Google Scholar] [CrossRef]
- Helton, A.M.; Ardón, M.; Bernhardt, E.S. Hydrologic Context Alters Greenhouse Gas Feedbacks of Coastal Wetland Salinization. Ecosystems 2019, 22, 1108–1125. [Google Scholar] [CrossRef]
- Healy, R.W.; Winter, T.C.; LaBaugh, J.W.; Franke, L.O. USGS Circular 1308: Water Budgets: Foundations for Effective Water-Resources and Environmental Management. US Geol. Surv. Circ. 2007, 1308, 90. [Google Scholar]
- Anderson, J.T.; Davis, C.A. Wetland techniques. In Wetland Techniques, 1st ed.; Springer: Dordrecht, The Netherlands, 2013; Volume 3. [Google Scholar] [CrossRef]
- Anders, N.; Valente, J.; Masselink, R.; Keesstra, S. Comparing Filtering Techniques for Removing Vegetation from UAV-Based Photogrammetric Point Clouds. Drones 2019, 3, 61. [Google Scholar] [CrossRef]
- Chen, S.; Johnson, F.; Drummond, C.; Glamore, W. A new method to improve the accuracy of remotely sensed data for wetland water balance estimates. J. Hydrol. Reg. Stud. 2020, 29, 100689. [Google Scholar] [CrossRef]
- Brannen, R.; Spence, C.; Ireson, A. Influence of shallow groundwater-surface water interactions on the hydrological connectivity and water budget of a wetland complex. Hydrol. Process. 2015, 29, 3862–3877. [Google Scholar] [CrossRef]
- Gil-Márquez, J.; Andreo, B.; Mudarra, M. Comparative Analysis of Runoff and Evaporation Assessment Methods to Evaluate Wetland–Groundwater Interaction in Mediterranean Evaporitic-Karst Aquatic Ecosystem. Water 2021, 13, 1482. [Google Scholar] [CrossRef]
- Furlan, L.M.; Rosolen, V.; Salles, J.; Moreira, C.A.; Ferreira, M.E.; Bueno, G.T.; Coelho, C.V.D.S.; Mounier, S. Natural superficial water storage and aquifer recharge assessment in Brazilian savanna wetland using unmanned aerial vehicle and geophysical survey. J. Unmanned Veh. Syst. 2020, 8, 224–244. [Google Scholar] [CrossRef]
- Chen, S.; Johnson, F.; Glamore, W. Integrating Remote Sensing and Numerical Modeling to Quantify the Water Balance of Climate-Induced Intermittent Wetlands. Water Resour. Res. 2021, 57. [Google Scholar] [CrossRef]
- Muñoz Pérez, J.J.; Jofré, J.M.; Pérez-Fortis, M.J.; De la Casa, Á. Procesos de inundabilidad en la zona marismal de Los Toruños (Cádiz). Tecnoambiente Rev. Prof. Tecnol. Equip. Ing. Ambient. 1999, 9, 35–38. [Google Scholar]
- Consejería de Medio Ambiente, Junta de Andalucía. Decreto 79/2004, de 24 de febrero, por el que se aprueban el Plan de Ordenación de los Recursos Naturales y el Plan Rector de Uso y Gestión del Parque Natural Bahía de Cádiz. 2004. Available online: https://www.juntadeandalucia.es/boja/2004/71/2 (accessed on 23 August 2022).
- Gutiérrez-Mas, J.M.; García-López, S. Recent evolution of the river mouth intertidal zone at the Río San Pedro tidal channel (Cádiz Bay, SW Spain): Controlling factors of geomorphologic and depositional changes. Geol. Acta 2015, 13, 123–136. [Google Scholar] [CrossRef]
- Junta de Andalucía. DECRETO 79/2004, de 24 de febrero, por el que se aprueban el Plan de Ordenación de los Recursos Naturales y el Plan Rector de Uso y Gestión del Parque Natural Bahía de Cádiz. 2013. Available online: https://www.juntadeandalucia.es/medioambiente/portal/landing-page-planificacion/-/asset_publisher/Jw7AHImcvbx0/content/porn-y-prug-del-parque-natural-bah-c3-ada-de-c-c3-a1diz-incluye-los-parajes-naturales-isla-del-trocadero-y-marismas-de-sancti-petri-/20151 (accessed on 15 August 2022).
- García de Lomas, J.; García, C.M.Y.; Canca, I. Caracterización y fenología de las lagunas temporales del Pinar de La Algaida (Puerto Real, Cádiz). Rev. Soc. Gaditana Hist. Nat. 2004, 4, 105–124. [Google Scholar]
- Pérez Hurtado, A.; García-Jiménez, C. Estudio de la adecuación y acondicionamiento para instalaciones y actuaciones de investigación y uso público de los terrenos colindantes al Río San Pedro, Puerto Real, Cádiz. Unpublished Report. 2004; 89p. [Google Scholar]
- Penman, H.L. Natural evaporation from open water, bare soil and grass. In Proceedings of the Royal Society of London Series A–Mathematical and Physical Sciences; The Royal Society: London, UK; Volume 193, p. 120.
- García-López, S.; Ruiz-Ortiz, V.; Barbero, L.; Sánchez-Bellón, Á. Contribution of the UAS to the determination of the water budget in a coastal wetland: A case study in the natural park of the Bay of Cádiz (SW Spain). Eur. J. Remote Sens. 2018, 51, 965–977. [Google Scholar] [CrossRef]
- Schönberger, J.L.; Frahm, J.M. Structure from motion revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2016. [Google Scholar]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Skeletal graphs for efficient structure from motion. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2008), Anchorage, AK, USA, 24–26 June 2008; pp. 1–8. [Google Scholar]
- Madden, M.; Jordan, T.; Bernardes, S.; Cotten, D.; O’Hare, N.; Pasqua, A. Unmanned Aerial Systems and Structure from Motion Revolutionize Wetlands Mapping. In Remote Sensing of Wetlands: Applications and Advances, 1st ed.; CRC Press: Boca Raton, FL, USA, 2015; 28p. [Google Scholar]
- Contreras-De-Villar, F.; García, F.J.; Muñoz-Perez, J.J.; Contreras-De-Villar, A.; Ruiz-Ortiz, V.; Lopez, P.; Garcia-López, S.; Jigena, B. Beach Leveling Using a Remotely Piloted Aircraft System (RPAS): Problems and Solutions. J. Mar. Sci. Eng. 2020, 9, 19. [Google Scholar] [CrossRef]
- Schweikert, D.G. An interpolation curve using spline in tension. J. Math. Phys. 1966, 45, 312–313. [Google Scholar] [CrossRef]
- García-López, S.; Ruiz-Ortiz, V.; Sánchez-Bellón, A.; Muñoz-Arroyo, G.; Luján, M. Creación de un laboratorio natural de Hidrología en el Parque Metropolitano de Los Toruños y su Aplicación Docente; III Jornadas de Innovación Docente Universitaria, Universidad de Cádiz: Puerto Real, Spain, 2017; pp. 445–448. ISBN 978-84-697-4354-6. [Google Scholar]
- Nielsen, P. Tidal dynamics of the water table in beaches. Water Resour. Res. 1990, 26, 2127–2134. [Google Scholar] [CrossRef]
- Li, L.; Jeng, D.S.; Barry, D.A. Tidal fluctuations in a leaky confined aquifer: Localised effects of an overlying phreatic aquifer. J. Hydrol. 2002, 265, 283–287. [Google Scholar] [CrossRef]
- Ramberg, L.; Wolski, P.; Krah, M. Water balance and infiltration in a seasonal floodplain in the Okaying Delta Botswana. Wetlands 2006, 26, 677–690. [Google Scholar] [CrossRef]
- Mangangka, I.M. The Decline of Soil Infiltration Capacity Due To High Elevation Groundwater. Civ. Eng. Dimens. 2008, 10, 35–39. [Google Scholar]
- Brunner, P.; Simmons, C.T.; Cook, P.G. Spatial and temporal aspects of the transition from connection to disconnection between rivers, lakes and groundwater. J. Hydrol. 2009, 376, 159–169. [Google Scholar] [CrossRef]
- Shadab, M.A.; Hesse, M.A. Analysis of Gravity-Driven Infiltration With the Development of a Saturated Region. Water Resour. Res. 2022, 58, 27. [Google Scholar] [CrossRef]
- Curcio, A.C.; Peralta, G.; Aranda, M.; Barbero, L. Evaluating the Performance of High Spatial Resolution UAV-Photogrammetry and UAV-LiDAR for Salt Marshes: The Cádiz Bay Study Case. Remote Sens. 2022, 14, 3582. [Google Scholar] [CrossRef]
- García-López, S.; Vélez-Nicolás, M.; Zarandona-Palacio, P.; Curcio, A.; Ruiz-Ortiz, V.; Barbero, L. UAV-borne LiDAR revolutionizing groundwater level mapping. Sci. Total Environ. 2023, 859, 16. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Mission (17 April 2017) | Second Mission (20 March 2018) | |
|---|---|---|
| System | ATYGES FV-8 | Phantom 3 |
| Number of images | 305 | 91 |
| Average GSD (cm) | 1.38 | 3.26 |
| Key points per image (median) | 88,241 | 45,897 |
| Matches per calibrated images (median) | 43,077 | 24,242 |
| Number of GCP | 11 | 0 |
| Number of 2D key points observations for bundle block adjustment | 12,709,676 | 2,143,762 |
| Number of 3D points for bundle block adjustment | 4,595,853 | 797,045 |
| Mean reprojection error (pixels) | 0.133 | 0.179 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-López, S.; Vélez-Nicolás, M.; Martínez-López, J.; Sánchez-Bellón, A.; Pacheco-Orellana, M.J.; Ruiz-Ortiz, V.; Muñoz-Pérez, J.J.; Barbero, L. Using UAV Photogrammetry and Automated Sensors to Assess Aquifer Recharge from a Coastal Wetland. Remote Sens. 2022, 14, 6185. https://doi.org/10.3390/rs14246185
García-López S, Vélez-Nicolás M, Martínez-López J, Sánchez-Bellón A, Pacheco-Orellana MJ, Ruiz-Ortiz V, Muñoz-Pérez JJ, Barbero L. Using UAV Photogrammetry and Automated Sensors to Assess Aquifer Recharge from a Coastal Wetland. Remote Sensing. 2022; 14(24):6185. https://doi.org/10.3390/rs14246185
Chicago/Turabian StyleGarcía-López, Santiago, Mercedes Vélez-Nicolás, Javier Martínez-López, Angel Sánchez-Bellón, María Jesús Pacheco-Orellana, Verónica Ruiz-Ortiz, Juan José Muñoz-Pérez, and Luis Barbero. 2022. "Using UAV Photogrammetry and Automated Sensors to Assess Aquifer Recharge from a Coastal Wetland" Remote Sensing 14, no. 24: 6185. https://doi.org/10.3390/rs14246185
APA StyleGarcía-López, S., Vélez-Nicolás, M., Martínez-López, J., Sánchez-Bellón, A., Pacheco-Orellana, M. J., Ruiz-Ortiz, V., Muñoz-Pérez, J. J., & Barbero, L. (2022). Using UAV Photogrammetry and Automated Sensors to Assess Aquifer Recharge from a Coastal Wetland. Remote Sensing, 14(24), 6185. https://doi.org/10.3390/rs14246185