
Digital Soil Texture Mapping and Spatial Transferability of Machine Learning Models Using Sentinel-1, Sentinel-2, and Terrain-Derived Covariates
 ,
,  and
and
Abstract
1. Introduction
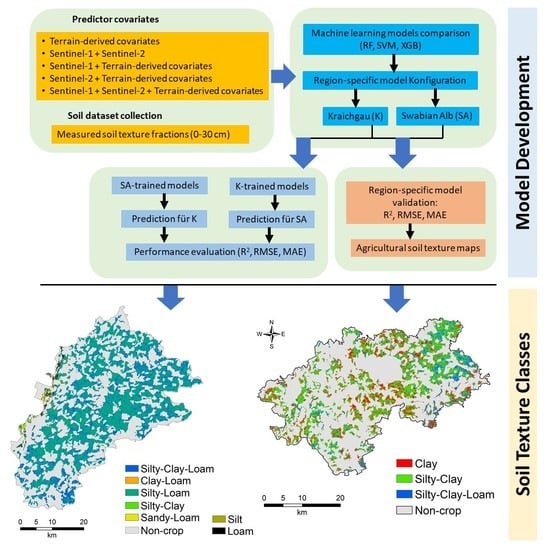
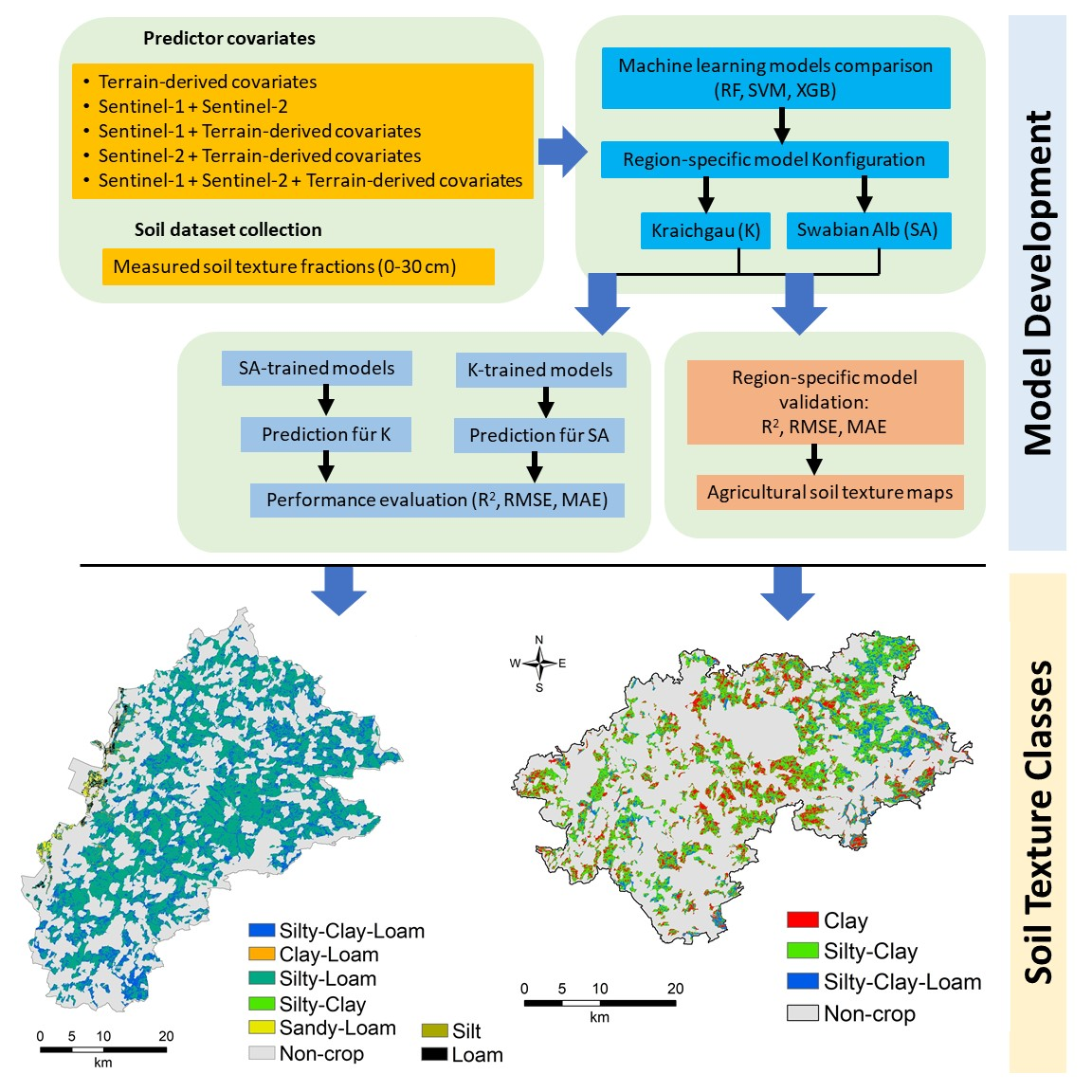
2. Materials and Methods
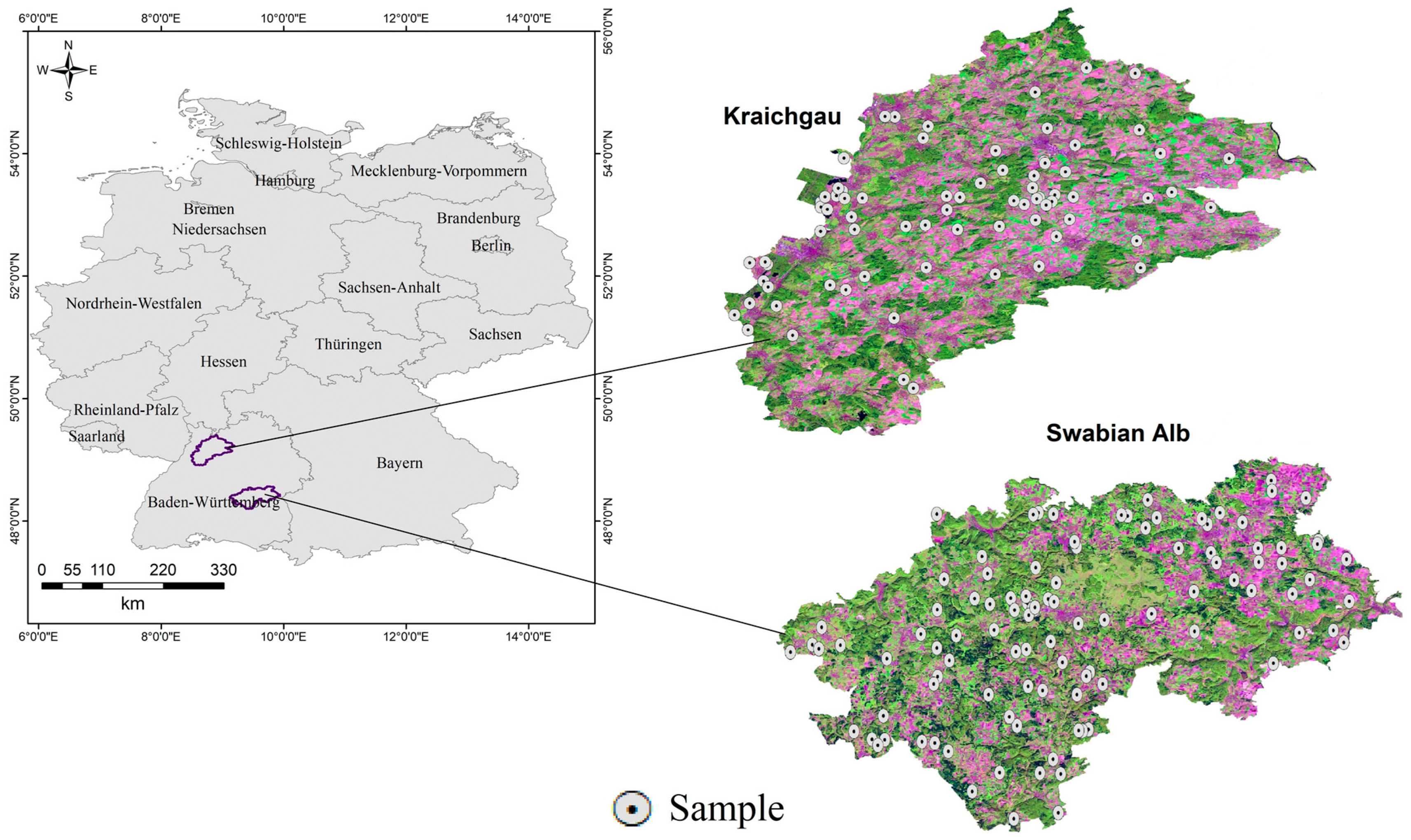
2.1. Study Areas and Soil Sampling
2.2. Remote Sensing Data (RS)
2.3. Terrain-Derived Covariates (TDC)
2.4. Machine Learning Models
2.4.1. Random Forest (RF)
2.4.2. Support Vector Regression (SVR)
2.4.3. Extreme Gradient Boosting (XGB)
2.5. Model Evaluation
3. Results
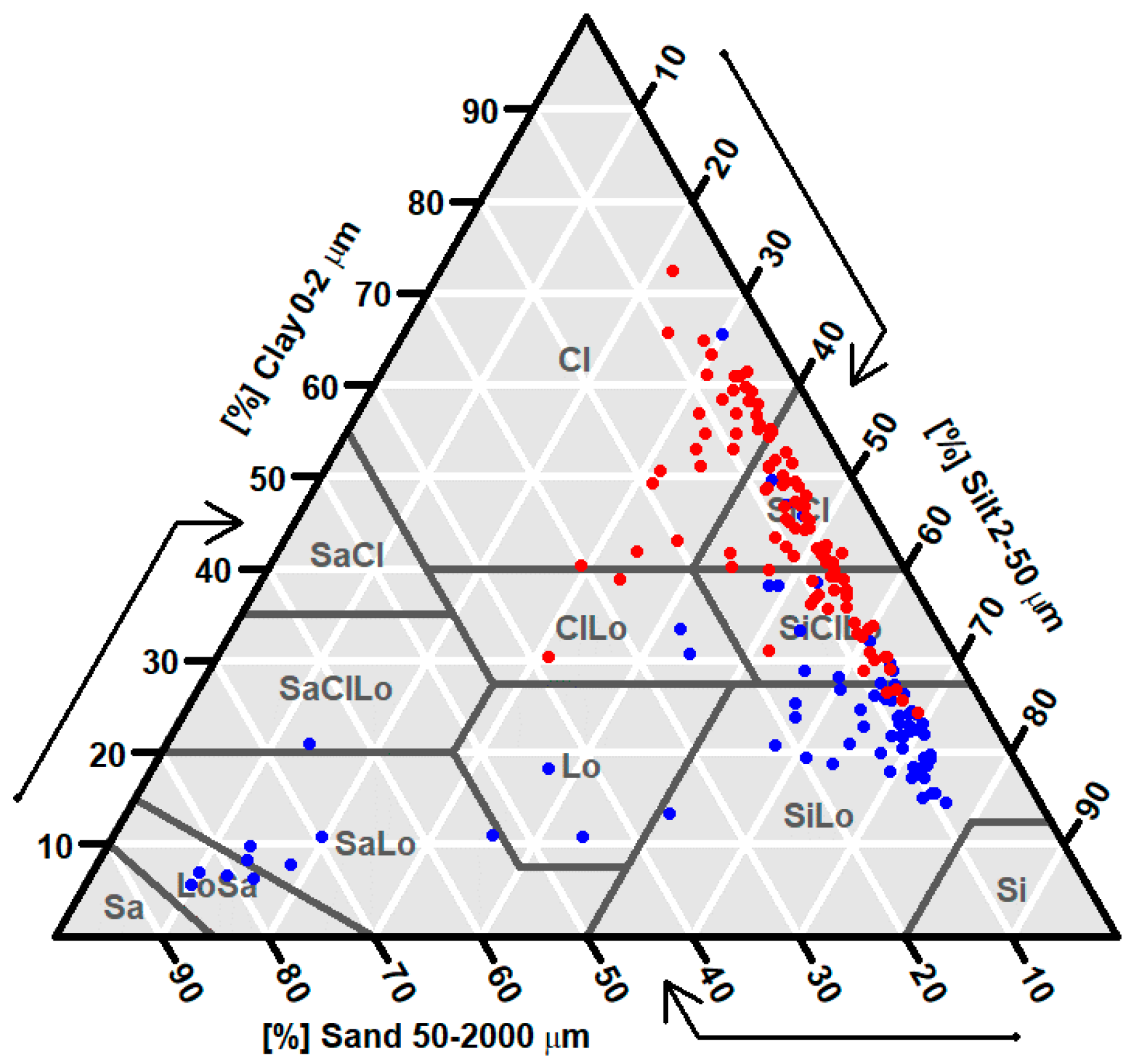
3.1. Summary Statistics of Soil Texture Data
3.2. Model Performance
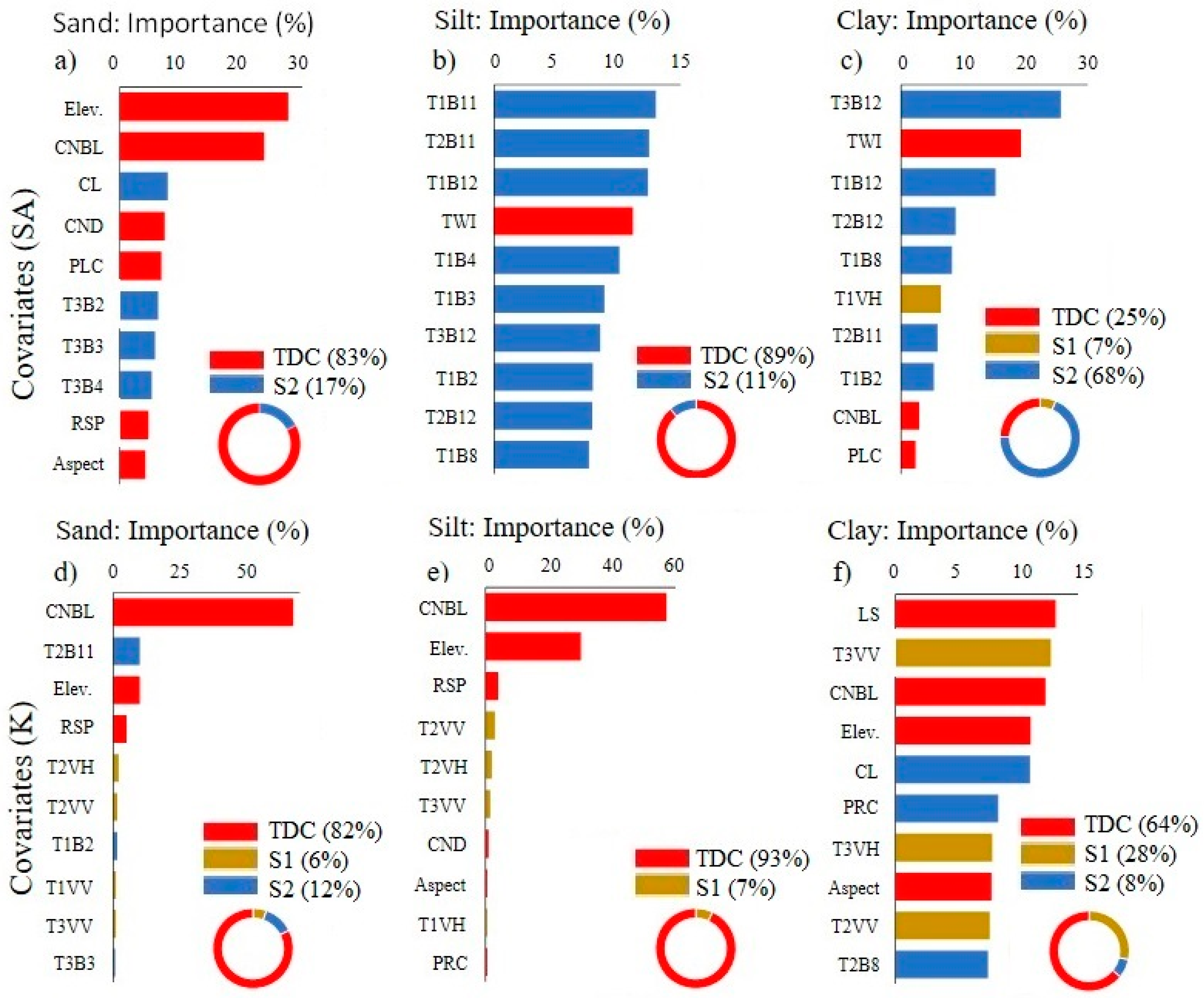
3.3. Variable Importance for Computational Models
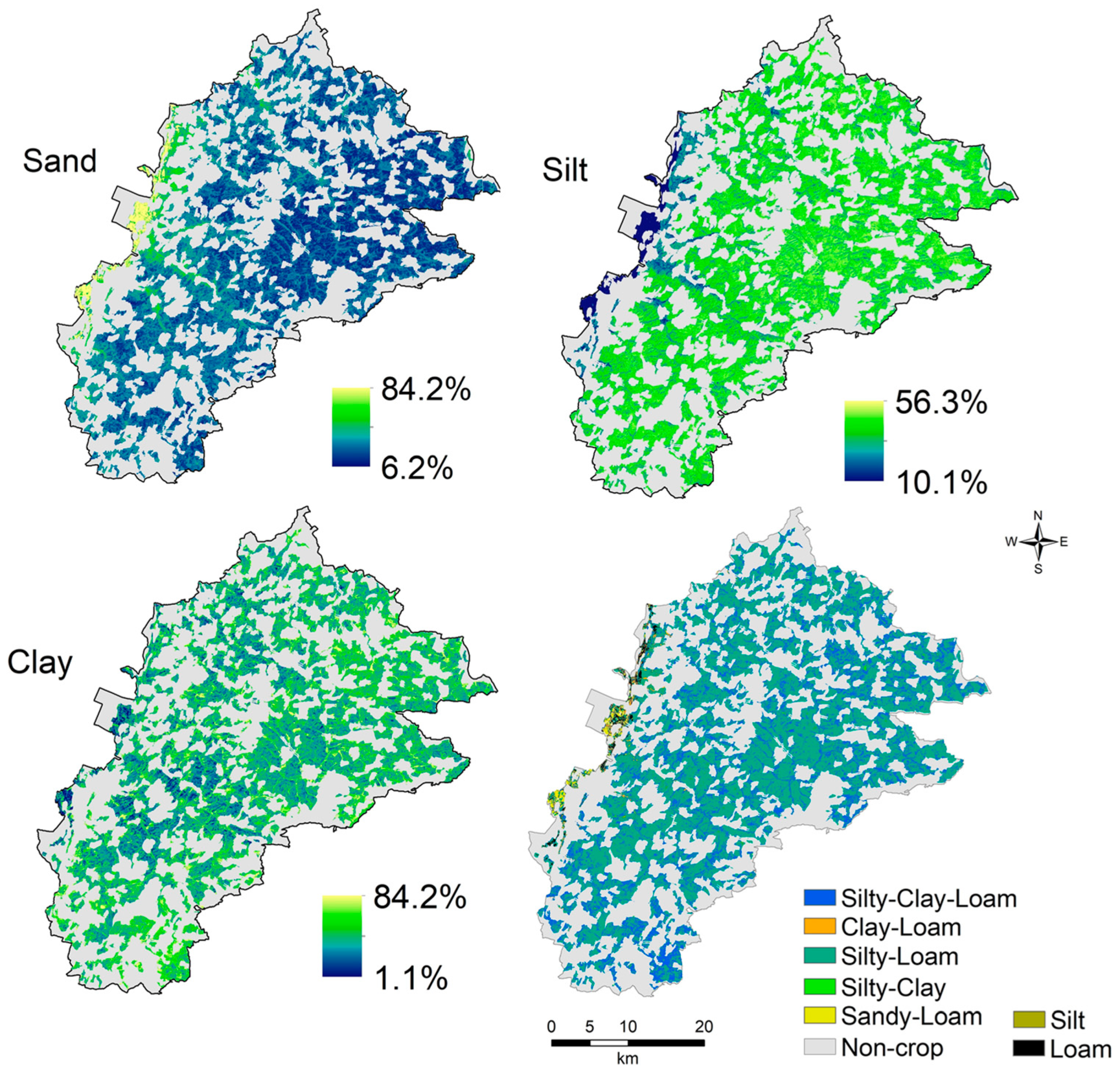
3.4. Mapping of Soil Textural Classes within the Training Region
3.5. Spatial Transferability of Best-Fitted Models Outside the Training Region
4. Discussion
4.1. Variable Importance for ML Models
4.2. Accuracy Assessment of ML Models
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hartemink, A.E.; McBratney, A. A Soil Science Renaissance. Geoderma 2008, 148, 123–129. [Google Scholar] [CrossRef]
- Dharumarajan, S.; Hegde, R. Digital Mapping of Soil Texture Classes Using Random Forest Classification Algorithm. Soil Use Manag. 2022, 38, 135–149. [Google Scholar] [CrossRef]
- Castaldi, F.; Palombo, A.; Santini, F.; Pascucci, S.; Pignatti, S.; Casa, R. Evaluation of the Potential of the Current and Forthcoming Multispectral and Hyperspectral Imagers to Estimate Soil Texture and Organic Carbon. Remote Sens. Environ. 2016, 179, 54–65. [Google Scholar] [CrossRef]
- Dharumarajan, S.; Hegde, R.; Lalitha, M.; Kalaiselvi, B.; Singh, S.K. Pedotransfer Functions for Predicting Soil Hydraulic Properties in Semi-Arid Regions of Karnataka Plateau, India. Curr. Sci. 2019, 116, 1237. [Google Scholar] [CrossRef]
- Thompson, J.A.; Roecker, S.; Grunwald, S.; Owens, P.R. Digital soil mapping. In Hydropedology; Elsevier: Amsterdam, The Netherlands, 2012; pp. 665–709. ISBN 978-0-12-386941-8. [Google Scholar]
- Pachepsky, Y.; Rawls, W.J. Development of Pedotransfer Functions in Soil Hydrology, 1st ed.; Elsevier: Oxford, UK, 2004; ISBN 9780080530369. [Google Scholar]
- Bockheim, J.G.; Hartemink, A.E. Distribution and Classification of Soils with Clay-Enriched Horizons in the USA. Geoderma 2013, 209–210, 153–160. [Google Scholar] [CrossRef]
- Arrouays, D.; Grundy, M.G.; Hartemink, A.E.; Hempel, J.W.; Heuvelink, G.B.M.; Hong, S.Y.; Lagacherie, P.; Lelyk, G.; McBratney, A.B.; McKenzie, N.J.; et al. Chapter three—GlobalSoilMap: Toward a fine-resolution global grid of soil properties. In Advances in Agronomy; Sparks, D.L., Ed.; Academic Press: Cambridge, MA, USA, 2014; Volume 125, pp. 93–134. [Google Scholar]
- Niang, M.A.; Nolin, M.C.; Jégo, G.; Perron, I. Digital Mapping of Soil Texture Using RADARSAT-2 Polarimetric Synthetic Aperture Radar Data. Soil Sci. Soc. Am. J. 2014, 78, 673–684. [Google Scholar] [CrossRef]
- Forkuor, G.; Hounkpatin, O.K.L.; Welp, G.; Thiel, M. High Resolution Mapping of Soil Properties Using Remote Sensing Variables in South-Western Burkina Faso: A Comparison of Machine Learning and Multiple Linear Regression Models. PLoS ONE 2017, 12, e0170478. [Google Scholar] [CrossRef]
- Mulla, D.J.; Beatty, M.; Sekely, A.C. Evaluation of remote sensing and targeted soil sampling for variable rate application of lime. In Proceedings of the 5th International Conference on Precision Agriculture, Bloomington, MN, USA, 16–19 July 2000; Robert, P.C., Rust, R.H., Larson, W.E., Eds.; ASA-CSSA-SSSA. American Society of Agronomy: Madison, WI, USA, 2001. [Google Scholar]
- Manchanda, M.L.; Kudrat, M.; Tiwari, A.K. Soil Survey and Mapping Using Remote Sensing. Trop. Ecol. 2002, 43, 61–74. [Google Scholar]
- Mulder, V.L.; de Bruin, S.; Schaepman, M.E.; Mayr, T.R. The Use of Remote Sensing in Soil and Terrain Mapping—A Review. Geoderma 2011, 162, 1–19. [Google Scholar] [CrossRef]
- Malone, B.P.; Jha, S.K.; Minasny, B.; McBratney, A.B. Comparing Regression-Based Digital Soil Mapping and Multiple-Point Geostatistics for the Spatial Extrapolation of Soil Data. Geoderma 2016, 262, 243–253. [Google Scholar] [CrossRef]
- Gomez, C.; Adeline, K.; Bacha, S.; Driessen, B.; Gorretta, N.; Lagacherie, P.; Roger, J.M.; Briottet, X. Sensitivity of Clay Content Prediction to Spectral Configuration of VNIR/SWIR Imaging Data, from Multispectral to Hyperspectral Scenarios. Remote Sens. Environ. 2018, 204, 18–30. [Google Scholar] [CrossRef]
- Chabrillat, S.; Ben-Dor, E.; Cierniewski, J.; Gomez, C.; Schmid, T.; van Wesemael, B. Imaging Spectroscopy for Soil Mapping and Monitoring. Surv. Geophys. 2019, 40, 361–399. [Google Scholar] [CrossRef]
- Dematte, J.A.M.; Fiorio, P.R.; Ben-Dor, E. Estimation of Soil Properties by Orbital and Laboratory Reflectance Means and Its Relation with Soil Classification. Open Remote Sens. J. 2009, 2, 12–23. [Google Scholar] [CrossRef]
- Castaldi, F.; Casa, R.; Castrignanò, A.; Pascucci, S.; Palombo, A.; Pignatti, S. Estimation of Soil Properties at the Field Scale from Satellite Data: A Comparison between Spatial and Non-Spatial Techniques: Estimation of Soil Properties from Satellite Data. Eur. J. Soil Sci. 2014, 65, 842–851. [Google Scholar] [CrossRef]
- Wu, J.; Li, Z.; Gao, Z.; Wang, B.; Bai, L.; Sun, B.; Li, C.; Ding, X. Degraded Land Detection by Soil Particle Composition Derived from Multispectral Remote Sensing Data in the Otindag Sandy Lands of China. Geoderma 2015, 241–242, 97–106. [Google Scholar] [CrossRef]
- Shabou, M.; Mougenot, B.; Chabaane, Z.; Walter, C.; Boulet, G.; Aissa, N.; Zribi, M. Soil Clay Content Mapping Using a Time Series of Landsat TM Data in Semi-Arid Lands. Remote Sens. 2015, 7, 6059–6078. [Google Scholar] [CrossRef]
- Vaudour, E.; Gomez, C.; Fouad, Y.; Lagacherie, P. Sentinel-2 Image Capacities to Predict Common Topsoil Properties of Temperate and Mediterranean Agroecosystems. Remote Sens. Environ. 2019, 223, 21–33. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A Tutorial on Synthetic Aperture Radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Long, D.G. Microwave Radar and Radiometric Remote Sensing; The University of Michigan Press: Ann Arbor, MI, USA, 2014; ISBN 978-0-472-11935-6. [Google Scholar]
- Marzahn, P.; Meyer, S. Utilization of Multi-Temporal Microwave Remote Sensing Data within a Geostatistical Regionalization Approach for the Derivation of Soil Texture. Remote Sens. 2020, 12, 2660. [Google Scholar] [CrossRef]
- Baghdadi, N.; Zribi, M.; Loumagne, C.; Ansart, P.; Anguela, T.P. Analysis of TerraSAR-X Data and Their Sensitivity to Soil Surface Parameters over Bare Agricultural Fields. Remote Sens. Environ. 2008, 112, 4370–4379. [Google Scholar] [CrossRef]
- Zribi, M.; Kotti, F.; Lili-Chabaane, Z.; Baghdadi, N.; Ben Issa, N.; Amri, R.; Amri, B.; Chehbouni, A. Soil Texture Estimation Over a Semiarid Area Using TerraSAR-X Radar Data. IEEE Geosci. Remote Sens. Lett. 2012, 9, 353–357. [Google Scholar] [CrossRef]
- Gorrab, A.; Zribi, M.; Baghdadi, N.; Mougenot, B.; Fanise, P.; Chabaane, Z. Retrieval of Both Soil Moisture and Texture Using TerraSAR-X Images. Remote Sens. 2015, 7, 10098–10116. [Google Scholar] [CrossRef]
- Bousbih, S.; Zribi, M.; Pelletier, C.; Gorrab, A.; Lili-Chabaane, Z.; Baghdadi, N.; Ben Aissa, N.; Mougenot, B. Soil Texture Estimation Using Radar and Optical Data from Sentinel-1 and Sentinel-2. Remote Sens. 2019, 11, 1520. [Google Scholar] [CrossRef]
- Gholizadeh, A.; Žižala, D.; Saberioon, M.; Borůvka, L. Soil Organic Carbon and Texture Retrieving and Mapping Using Proximal, Airborne and Sentinel-2 Spectral Imaging. Remote Sens. Environ. 2018, 218, 89–103. [Google Scholar] [CrossRef]
- Gomez, C.; Dharumarajan, S.; Féret, J.-B.; Lagacherie, P.; Ruiz, L.; Sekhar, M. Use of Sentinel-2 Time-Series Images for Classification and Uncertainty Analysis of Inherent Biophysical Property: Case of Soil Texture Mapping. Remote Sens. 2019, 11, 565. [Google Scholar] [CrossRef]
- Brungard, C.W.; Boettinger, J.L.; Duniway, M.C.; Wills, S.A.; Edwards, T.C. Machine Learning for Predicting Soil Classes in Three Semi-Arid Landscapes. Geoderma 2015, 239–240, 68–83. [Google Scholar] [CrossRef]
- Heung, B.; Ho, H.C.; Zhang, J.; Knudby, A.; Bulmer, C.E.; Schmidt, M.G. An Overview and Comparison of Machine-Learning Techniques for Classification Purposes in Digital Soil Mapping. Geoderma 2016, 265, 62–77. [Google Scholar] [CrossRef]
- Khaledian, Y.; Miller, B.A. Selecting Appropriate Machine Learning Methods for Digital Soil Mapping. Appl. Math. Model. 2020, 81, 401–418. [Google Scholar] [CrossRef]
- Wadoux, A.M.J.-C.; Minasny, B.; McBratney, A.B. Machine Learning for Digital Soil Mapping: Applications, Challenges and Suggested Solutions. Earth-Sci. Rev. 2020, 210, 103359. [Google Scholar] [CrossRef]
- Ma, Y.; Minasny, B.; Malone, B.P.; Mcbratney, A.B. Pedology and Digital Soil Mapping (DSM). Eur. J. Soil Sci. 2019, 70, 216–235. [Google Scholar] [CrossRef]
- Biney, J.K.M.; Vašát, R.; Bell, S.M.; Kebonye, N.M.; Klement, A.; John, K.; Borůvka, L. Prediction of Topsoil Organic Carbon Content with Sentinel-2 Imagery and Spectroscopic Measurements under Different Conditions Using an Ensemble Model Approach with Multiple Pre-Treatment Combinations. Soil. Till. Res. 2022, 220, 105379. [Google Scholar] [CrossRef]
- Fischer, M.; Bossdorf, O.; Gockel, S.; Hänsel, F.; Hemp, A.; Hessenmöller, D.; Korte, G.; Nieschulze, J.; Pfeiffer, S.; Prati, D.; et al. Implementing Large-Scale and Long-Term Functional Biodiversity Research: The Biodiversity Exploratories. Basic Appl. Ecol. 2010, 11, 473–485. [Google Scholar] [CrossRef]
- Ingwersen, J.; Steffens, K.; Högy, P.; Warrach-Sagi, K.; Zhunusbayeva, D.; Poltoradnev, M.; Gäbler, R.; Wizemann, H.-D.; Fangmeier, A.; Wulfmeyer, V.; et al. Comparison of Noah Simulations with Eddy Covariance and Soil Water Measurements at a Winter Wheat Stand. Agric. For. Meteorol. 2011, 151, 345–355. [Google Scholar] [CrossRef]
- Ali, R.S.; Ingwersen, J.; Demyan, M.S.; Funkuin, Y.N.; Wizemann, H.-D.; Kandeler, E.; Poll, C. Modelling in Situ Activities of Enzymes as a Tool to Explain Seasonal Variation of Soil Respiration from Agro-Ecosystems. Soil Biol. Biochem. 2015, 81, 291–303. [Google Scholar] [CrossRef]
- Mirzaeitalarposhti, R.; Demyan, M.S.; Rasche, F.; Cadisch, G.; Müller, T. Mid-Infrared Spectroscopy to Support Regional-Scale Digital Soil Mapping on Selected Croplands of South-West Germany. CATENA 2017, 149, 283–293. [Google Scholar] [CrossRef]
- Boden, A.G. Bodenkundliche Kartieranleitung, 5th ed.; Schweizerbart [i. Komm.]: Stuttgart, Germany, 2005; ISBN 978-3-510-95920-4. [Google Scholar]
- DIN ISO 11277. In Soil Quality—Determination of Particle Size Distribution in Mineral Soil Material—Method by Sieving and Sedimentation; Beuth: Berlin, Germany, 2009.
- WRB. World Reference Base for Soil Resources, 2006: A Framework for International Classification, Correlation, and Communication; Food and Agriculture Organization of the United Nations: Rome, Italy, 2006; ISBN 978-92-5-105511-3. [Google Scholar]
- Moeys, J. The Soil Texture Wizard: R Functions for Plotting, Classifying, Transforming and Exploring Soil Texture Data. R package soiltexture Vignette, Version 1.5.1. Available online: https://cran.r-project.org/web/packages/soiltexture/vignettes/soiltexture_vignette.pdf (accessed on 16 February 2022).
- Yang, R.-M.; Guo, W.-W. Modelling of Soil Organic Carbon and Bulk Density in Invaded Coastal Wetlands Using Sentinel-1 Imagery. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101906. [Google Scholar] [CrossRef]
- Zhou, T.; Geng, Y.; Chen, J.; Pan, J.; Haase, D.; Lausch, A. High-Resolution Digital Mapping of Soil Organic Carbon and Soil Total Nitrogen Using DEM Derivatives, Sentinel-1 and Sentinel-2 Data Based on Machine Learning Algorithms. Sci. Total Environ. 2020, 729, 138244. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Werner, M. Shuttle Radar Topography Mission (SRTM) Mission Overview. Frequenz 2001, 55, 75–79. [Google Scholar] [CrossRef]
- Olaya, V.; Conrad, O. Chapter 12 geomorphometry in SAGA. In Developments in Soil Science; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 293–308. ISBN 978-0-12-374345-9. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Boehmke, B.; Greenwell, B.M. Hands-On Machine Learning with R; Chapman and Hall/CRC: New York, NY, USA, 2019; ISBN 978-0-367-81637-7. [Google Scholar]
- Efron, B.; Tibshirani, R. Bootstrap Methods for Standard Errors, Confidence Intervals, and Other Measures of Statistical Accuracy. Statist. Sci. 1986, 1, 54–75. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Moguerza, J.M.; Muñoz, A. Support Vector Machines with Applications. Statist. Sci. 2006, 21, 322–336. [Google Scholar] [CrossRef]
- Marjanović, M.; Kovačević, M.; Bajat, B.; Voženílek, V. Landslide Susceptibility Assessment Using SVM Machine Learning Algorithm. Eng. Geol. 2011, 123, 225–234. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, ACM; San Francisco, CA, USA, 13 August 2016, pp. 785–794.
- Taghizadeh-Mehrjardi, R.; Schmidt, K.; Amirian-Chakan, A.; Rentschler, T.; Zeraatpisheh, M.; Sarmadian, F.; Valavi, R.; Davatgar, N.; Behrens, T.; Scholten, T. Improving the Spatial Prediction of Soil Organic Carbon Content in Two Contrasting Climatic Regions by Stacking Machine Learning Models and Rescanning Covariate Space. Remote Sens. 2020, 12, 1095. [Google Scholar] [CrossRef]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer Texts in Statistics; Springer: New York, NY, USA, 2013; Volume 103, ISBN 978-1-4614-7137-0. [Google Scholar]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Wang, Y.; Shao, M.; Liu, Z. Large-Scale Spatial Variability of Dried Soil Layers and Related Factors across the Entire Loess Plateau of China. Geoderma 2010, 159, 99–108. [Google Scholar] [CrossRef]
- Amirian-Chakan, A.; Minasny, B.; Taghizadeh-Mehrjardi, R.; Akbarifazli, R.; Darvishpasand, Z.; Khordehbin, S. Some Practical Aspects of Predicting Texture Data in Digital Soil Mapping. Soil Till. Res. 2019, 194, 104289. [Google Scholar] [CrossRef]
- Taghizadeh-Mehrjardi, R.; Emadi, M.; Cherati, A.; Heung, B.; Mosavi, A.; Scholten, T. Bio-Inspired Hybridization of Artificial Neural Networks: An Application for Mapping the Spatial Distribution of Soil Texture Fractions. Remote Sens. 2021, 13, 1025. [Google Scholar] [CrossRef]
- Shafizadeh-Moghadam, H.; Minaei, F.; Talebi-khiyavi, H.; Xu, T.; Homaee, M. Synergetic Use of Multi-Temporal Sentinel-1, Sentinel-2, NDVI, and Topographic Factors for Estimating Soil Organic Carbon. CATENA 2022, 212, 106077. [Google Scholar] [CrossRef]
- Sumfleth, K.; Duttmann, R. Prediction of Soil Property Distribution in Paddy Soil Landscapes Using Terrain Data and Satellite Information as Indicators. Ecol. Indic. 2008, 8, 485–501. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, L.; Chen, Y.; Shi, T.; Luo, M.; Ju, Q.; Zhang, H.; Wang, S. Prediction of Soil Organic Carbon Based on Landsat 8 Monthly NDVI Data for the Jianghan Plain in Hubei Province, China. Remote Sens. 2019, 11, 1683. [Google Scholar] [CrossRef]
- Meyer, S.; Blaschek, M.; Duttmann, R.; Ludwig, R. Improved Hydrological Model Parametrization for Climate Change Impact Assessment under Data Scarcity—The Potential of Field Monitoring Techniques and Geostatistics. Sci. Total Environ. 2016, 543, 906–923. [Google Scholar] [CrossRef] [PubMed]
- Boettinger, J.L.; Howell, D.W.; Moore, A.C.; Hartemink, A.E.; Kienast-Brown, S. Digital Soil Mapping: Bridging Research, Environmental Application, and Operation, 1st ed.; Springer: Dordrecht, The Netherlands, 2010; ISBN 978-90-481-8862-8. [Google Scholar]
- Veloso, A.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Planells, M.; Dejoux, J.-F.; Ceschia, E. Understanding the Temporal Behavior of Crops Using Sentinel-1 and Sentinel-2-like Data for Agricultural Applications. Remote Sens. Environ. 2017, 199, 415–426. [Google Scholar] [CrossRef]
- Mattia, F.; Thuy Le, T.; Picard, G.; Posa, F.I.; D’Alessio, A.; Notarnicola, C.; Gatti, A.M.; Rinaldi, M.; Satalino, G.; Pasquariello, G. Multitemporal C-Band Radar Measurements on Wheat Fields. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1551–1560. [Google Scholar] [CrossRef]
- Fajardo, M.; McBratney, A.; Whelan, B. Fuzzy Clustering of Vis–NIR Spectra for the Objective Recognition of Soil Morphological Horizons in Soil Profiles. Geoderma 2016, 263, 244–253. [Google Scholar] [CrossRef]
- Castaldi, F.; Palombo, A.; Pascucci, S.; Pignatti, S.; Santini, F.; Casa, R. Reducing the Influence of Soil Moisture on the Estimation of Clay from Hyperspectral Data: A Case Study Using Simulated PRISMA Data. Remote Sens. 2015, 7, 15561–15582. [Google Scholar] [CrossRef]
- Rosero-Vlasova, O.A.; Vlassova, L.; Pérez-Cabello, F.; Montorio, R.; Nadal-Romero, E. Modeling Soil Organic Matter and Texture from Satellite Data in Areas Affected by Wildfires and Cropland Abandonment in Aragón, Northern Spain. J. Appl. Remote Sens. 2018, 12, 1. [Google Scholar] [CrossRef]
- Mirzaeitalarposhti, R.; Demyan, M.S.; Rasche, F.; Poltoradnev, M.; Cadisch, G.; Müller, T. MidDRIFTS-PLSR-Based Quantification of Physico-Chemical Soil Properties across Two Agroecological Zones in Southwest Germany: Generic Independent Validation Surpasses Region Specific Cross-Validation. Nutr. Cycl. Agroecosyst. 2015, 102, 265–283. [Google Scholar] [CrossRef]
- Angelini, M.E.; Kempen, B.; Heuvelink, G.B.M.; Temme, A.J.A.M.; Ransom, M.D. Extrapolation of a Structural Equation Model for Digital Soil Mapping. Geoderma 2020, 367, 114226. [Google Scholar] [CrossRef]
- Silva, S.H.G.; de Menezes, M.D.; Owens, P.R.; Curi, N. Retrieving Pedologist’s Mental Model from Existing Soil Map and Comparing Data Mining Tools for Refining a Larger Area Map under Similar Environmental Conditions in Southeastern Brazil. Geoderma 2016, 267, 65–77. [Google Scholar] [CrossRef]
- Neyestani, M.; Sarmadian, F.; Jafari, A.; Keshavarzi, A.; Sharififar, A. Digital Mapping of Soil Classes Using Spatial Extrapolation with Imbalanced Data. Geoderma Reg. 2021, 26, e00422. [Google Scholar] [CrossRef]
- Peng, Y.; Xiong, X.; Adhikari, K.; Knadel, M.; Grunwald, S.; Greve, M.H. Modeling Soil Organic Carbon at Regional Scale by Combining Multi-Spectral Images with Laboratory Spectra. PLoS ONE 2015, 10, e0142295. [Google Scholar] [CrossRef] [PubMed]
- Thompson, J.A.; Kolka, R.K. Soil Carbon Storage Estimation in a Forested Watershed Using Quantitative Soil-Landscape Modeling. Soil Sci. Soc. Am. J. 2005, 69, 1086–1093. [Google Scholar] [CrossRef]
- Taghizadeh-Mehrjardi, R.; Sheikhpour, R.; Zeraatpisheh, M.; Amirian-Chakan, A.; Toomanian, N.; Kerry, R.; Scholten, T. Semi-Supervised Learning for the Spatial Extrapolation of Soil Information. Geoderma 2022, 426, 116094. [Google Scholar] [CrossRef]
- Shafizadeh-Moghadam, H. Fully Component Selection: An Efficient Combination of Feature Selection and Principal Component Analysis to Increase Model Performance. Expert Syst. Appl. 2021, 186, 115678. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predictors | Description |
|---|---|
| Remote sensing data (RS) | |
| B2:B12 | Sentinel-2 spectral bands |
| VH, VV | Sentinel-1 polarimetric images |
| Terrain-derived covariates (TDC) | |
| Elevation (Elev.) | Height above sea level |
| Aspect | The down slope direction of the maximum rate of change |
| Length–slope factor (LS) | Combined slope length and slope angle |
| Channel network base level (CNBL) | The interpolated channel network base level elevations |
| Channel network distance (CND) | Vertical distance to channel network |
| Convergence Index (CI) | An index of convergence/divergence regarding overland flow |
| Plan curvature (PLC) | The curvature of a contour line |
| Profile curvature (PRC) | The curvature of the surface in the direction of the steepest slope |
| Relative slope position (RSP) | The position of one point relative to the ridge and valley of a slope |
| Topographic wetness index (TWI) | ln (specific catchment area/slope angle) |
| Sand (%) | Silt (%) | Clay (%) | ||||
|---|---|---|---|---|---|---|
| Statistics | K | SA | K | SA | K | SA |
| Min. | 3.4 | 4.1 | 10.1 | 22 | 5.6 | 22.2 |
| Max. | 84.3 | 38.4 | 76.6 | 69.1 | 65.4 | 72.3 |
| Mean | 20.3 | 8.8 | 56.7 | 46 | 23.1 | 45.2 |
| Median | 9.7 | 7 | 64.4 | 46.2 | 22.4 | 44.3 |
| Quartile 1 | 8.1 | 6.4 | 48.6 | 37.3 | 18.2 | 38.7 |
| Quartile 3 | 17.6 | 9 | 69.2 | 53.4 | 26.6 | 52.7 |
| SD | 22. 8 | 5.3 | 18.7 | 10.4 | 10.2 | 10.2 |
| CV | 112 | 60 | 33 | 23 | 44 | 23 |
| Models | RF | SVM | XGB | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | R2 | RMSE | MAE | |
| Sand | |||||||||
| S1 + S2 | 0.17 | 4.40 | 3.10 | 0.13 | 4.30 | 2.70 | 0.18 | 5.10 | 3.50 |
| TDC | 0.44 | 3.60 | 2.50 | 0.35 | 4.50 | 2.63 | 0.35 | 3.90 | 2.50 |
| S1 + TDC | 0.45 | 3.80 | 2.60 | 0.47 | 3.70 | 2.60 | 0.37 | 3.80 | 2.60 |
| S2 + TDC | 0.47 | 4.00 | 2.80 | 0.42 | 3.60 | 2.60 * | 0.26 | 4.20 | 2.90 |
| S1 + S2 + TDC | 0.49 | 4.00 | 2.80 | 0.42 | 3.80 | 2.80 | 0.33 | 4.40 | 2.90 |
| Silt | |||||||||
| S1 + S2 | 0.35 | 8.80 | 7.10 | 0.43 | 8.29 | 6.43 | 0.25 | 9.70 | 7.70 |
| TDC | 0.34 | 9.20 | 7.60 | 0.38 | 8.85 | 7.16 | 0.31 | 9.20 | 7.90 |
| S1 + TDC | 0.25 | 9.60 | 8.00 | 0.22 | 9.59 | 7.92 | 0.29 | 9.60 | 7.90 |
| S2 + TDC | 0.49 | 8.00 | 6.40 | 0.54 | 7.28 | 5.49 | 0.41 | 8.40 | 6.40 |
| S1 + S2 + TDC | 0.51 | 8.00 | 6.40 | 0.54 | 7.27 | 5.55 | 0.46 | 8.20 | 6.30 |
| Clay | |||||||||
| S1 + S2 | 0.47 | 8.00 | 6.30 | 0.39 | 8.42 | 6.97 | 0.46 | 8.10 | 6.30 |
| TDC | 0.30 | 9.23 | 7.50 | 0.32 | 8.94 | 7.25 | 0.27 | 9.25 | 7.70 |
| S1 + TDC | 0.30 | 9.30 | 7.50 | 0.31 | 9.29 | 7.66 | 0.26 | 9.60 | 7.60 |
| S2 + TDC | 0.59 | 7.60 | 6.00 | 0.56 | 7.1 | 5.34 | 0.61 | 7.00 | 5.40 |
| S1 + S2 + TDC | 0.57 | 7.50 | 6.00 | 0.54 | 7.3 | 5.79 | 0.64 | 6.80 | 5.50 |
| Models | RF | SVM | XGB | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | R2 | RMSE | MAE | |
| Sand | |||||||||
| S1 + S2 | 0.53 | 18.60 | 13.80 | 0.65 | 15.40 | 11.3 | 0.50 | 18.00 | 11.70 |
| TDC | 0.75 | 11.21 | 7.24 | 0.78 | 11.39 | 8.43 | 0.81 | 11.00 | 6.70 |
| S1 + TDC | 0.77 | 10.60 | 6.70 | 0.79 | 11.30 | 8.60 | 0.79 | 9.10 | 5.50 |
| S2 + TDC | 0.79 | 10.90 | 7.20 | 0.73 | 12.00 | 8.90 | 0.82 | 8.70 | 5.10 |
| S1 + S2 + TDC | 0.81 | 11.20 | 7.50 | 0.78 | 11.20 | 8.50 | 0.79 | 7.50 | 4.80 * |
| Silt | |||||||||
| S1 + S2 | 0.47 | 14.50 | 10.80 | 0.45 | 14.90 | 11.40 | 0.52 | 14.30 | 10.90 |
| TDC | 0.73 | 9.23 | 7.24 | 0.65 | 10.70 | 8.60 | 0.70 | 8.90 | 7.31 |
| S1 + TDC | 0.71 | 9.00 | 7.10 | 0.68 | 9.50 | 7.40 | 0.85 | 7.90 | 6.20 |
| S2 + TDC | 0.71 | 8.80 | 7.00 | 0.63 | 10.40 | 8.30 | 0.85 | 8.20 | 6.70 |
| S1 + S2 + TDC | 0.72 | 8.90 | 7.10 | 0.65 | 10.90 | 8.60 | 0.80 | 8.50 | 6.40 |
| Clay | |||||||||
| S1 + S2 | 0.22 | 7.3 | 5.8 | 0.43 | 6. 50 | 5.00 | 0.37 | 7.00 | 5.60 |
| TDC | 0.33 | 6.9 | 5.3 | 0.21 | 7. 20 | 5.40 | 0.24 | 7.40 | 5.90 |
| S1 + TDC | 0.31 | 6.9 | 5.6 | 0.35 | 7.00 | 5.20 | 0.27 | 7.50 | 6.00 |
| S2 + TDC | 0.45 | 6.8 | 5.2 | 0.38 | 6.50 | 5.30 | 0.38 | 6.90 | 5.20 |
| S1 + S2 + TDC | 0.38 | 6.8 | 5.4 | 0.48 | 6.10 | 4.90 | 0.35 | 6.80 | 5.30 |
| Predictions for K Using Best Models Trained in SA * | Predictions for SA Using Best Models Trained in K ** | |||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | |
| Sand | 0.02 | 23.90 | 16.70 | 0.003 | 6.20 | 5.20 |
| Silt | 0.01 | 24.30 | 22.40 | 0.004 | 21.90 | 19.20 |
| Clay | 0.002 | 19.80 | 17.60 | 0.090 | 10.20 | 8.30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirzaeitalarposhti, R.; Shafizadeh-Moghadam, H.; Taghizadeh-Mehrjardi, R.; Demyan, M.S. Digital Soil Texture Mapping and Spatial Transferability of Machine Learning Models Using Sentinel-1, Sentinel-2, and Terrain-Derived Covariates. Remote Sens. 2022, 14, 5909. https://doi.org/10.3390/rs14235909
Mirzaeitalarposhti R, Shafizadeh-Moghadam H, Taghizadeh-Mehrjardi R, Demyan MS. Digital Soil Texture Mapping and Spatial Transferability of Machine Learning Models Using Sentinel-1, Sentinel-2, and Terrain-Derived Covariates. Remote Sensing. 2022; 14(23):5909. https://doi.org/10.3390/rs14235909
Chicago/Turabian StyleMirzaeitalarposhti, Reza, Hossein Shafizadeh-Moghadam, Ruhollah Taghizadeh-Mehrjardi, and Michael Scott Demyan. 2022. "Digital Soil Texture Mapping and Spatial Transferability of Machine Learning Models Using Sentinel-1, Sentinel-2, and Terrain-Derived Covariates" Remote Sensing 14, no. 23: 5909. https://doi.org/10.3390/rs14235909
APA StyleMirzaeitalarposhti, R., Shafizadeh-Moghadam, H., Taghizadeh-Mehrjardi, R., & Demyan, M. S. (2022). Digital Soil Texture Mapping and Spatial Transferability of Machine Learning Models Using Sentinel-1, Sentinel-2, and Terrain-Derived Covariates. Remote Sensing, 14(23), 5909. https://doi.org/10.3390/rs14235909