
Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud


Abstract
1. Introduction
2. Study Site and Data
2.1. Study Site
2.2. Point Cloud Data
2.3. Measured Data
3. Methods
3.1. Individual Bamboo Segmentation
3.1.1. Seed Point Generation
3.1.2. Layer-wise Distance Discrimination
- (1)
- The layer , where the seed points are located, is taken as the starting layer, and the seed points are used as the initial clustering centers. The distances between one target point and the seed points are separately calculated. The target point is classified to the cluster with the shortest distance, and the ID of the seed point is also assigned to it.
- (2)
- Radius filtering is performed on the points with the same ID to weaken the influence of outliers on the subsequent generation of clustering centers. Then a convex hull is constructed and its centroid is calculated [35]. In order to prevent the centroid from being seriously deviated, it is necessary to set constraints on and . If the distance between the obtained centroid and the clustering center is less than the threshold value in the x-y plane, the midpoint replaces the original centroid; otherwise, the clustering center is used instead. Through repeated experiments, the threshold value is determined as 0.15 m to achieve good results. The modified point is used as the clustering center in layer . The same steps are performed layer by layer until the layers of the culm points are all handled (Figure 4c). The culm points below the seed point are treated in a similar way.
- (3)
- Different from the culm, the B&F of the canopy tend to grow upwards with a large inclination. This property makes it more advantageous to use the clustering center of layer for clustering the points in layer . The specific process can refer to the previous steps 1 and 2, but the difference is that the modified point is used as the clustering center of layer (Figure 4b). Likely, the canopy points with the same IDs will be assigned to the same clusters.
- (4)
- All points with the same ID, including canopy and culm points, will be combined as the point cloud of an individual Moso bamboo.
3.2. Construction of Bamboo Culm Axis
3.2.1. Culm Point Separation
3.2.2. Extraction of Cross-section Center Points
3.2.3. Culm Axis Construction
3.3. AGB Calculation
3.4. Accuracy Assessment
4. Results
4.1. Segmented Individual Bamboos
4.2. Extracted Structure Parameters
4.3. Estimated AGB
5. Discussion
5.1. Comparison of Individual Bamboo Segmentation Algorithms
5.2. Comparison of Bamboo Culm Axis Construction Methods
5.3. Error Sources and Potential Improvements
6. Conclusions
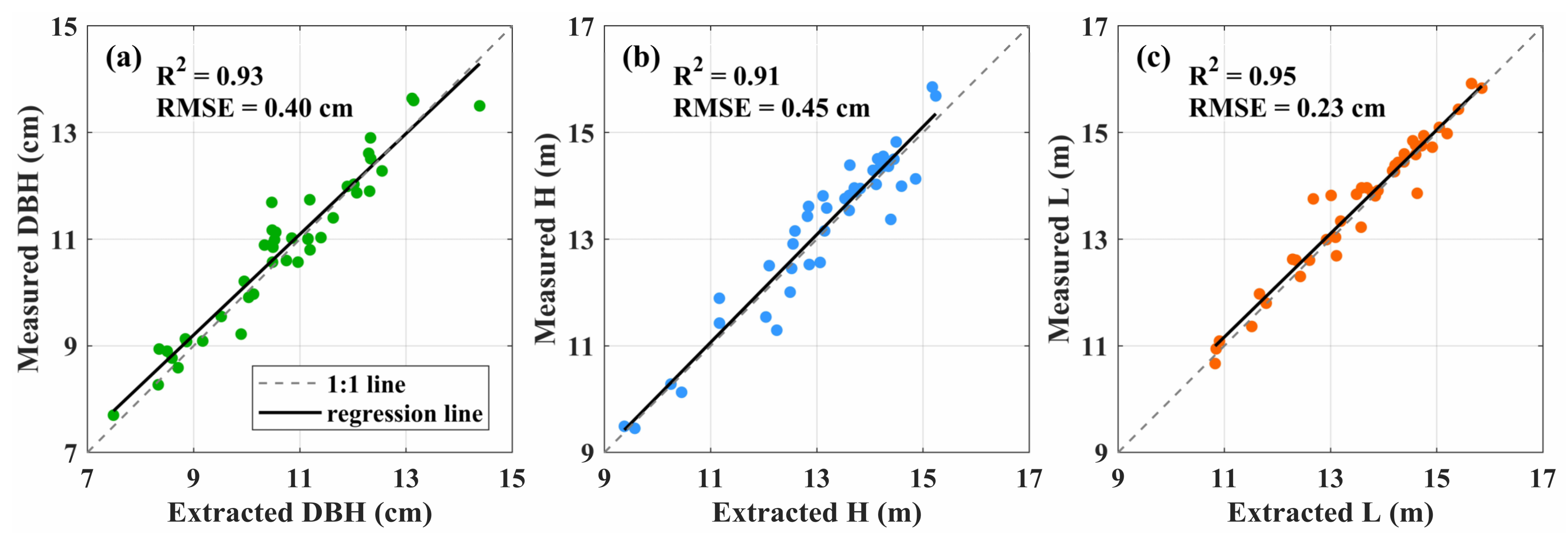
- The layer-wise distance discrimination method demonstrated superior performance in segmenting the individual Moso bamboos in a dense stand. The rate of the correct detection of bamboo culms was as high as 100%, and the precision of the complete segmentation of individual bamboo points was 90.4%;
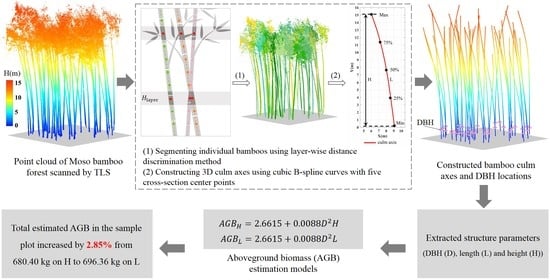
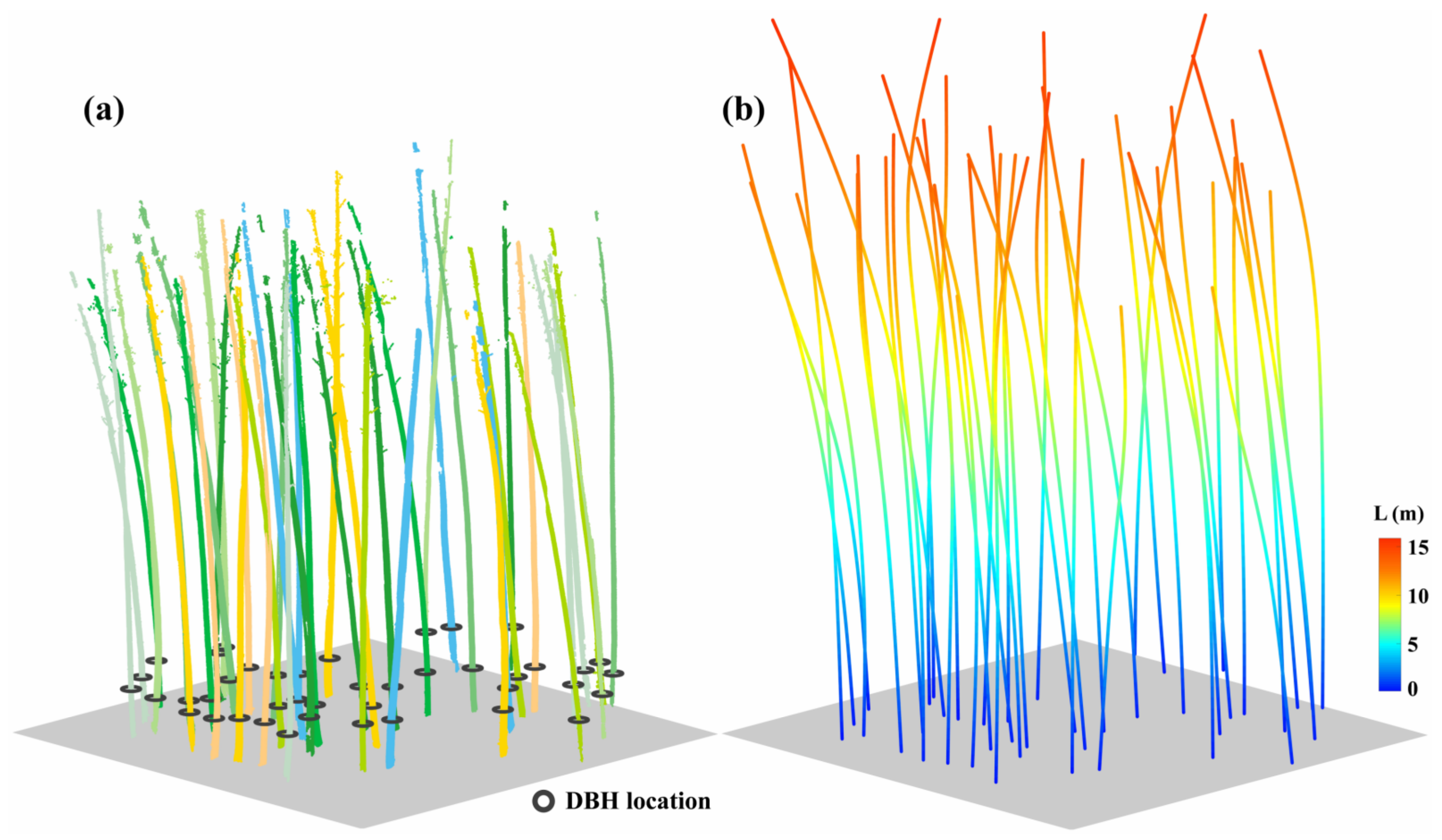
- The bamboo culm axis was automatically constructed by extracting the center points of the culm cross-sections on a layer-by-layer base. The total culm length of a bent Moso bamboo was accurately obtained by summing the lengths of the four segments fitted by cubic B-spline curves, with the and of 0.95 m and 0.23 m;
- The of an individual Moso bamboo was generally less than the corresponding . The difference was positively correlated with the bending degree of the bamboo culm. The total estimated AGB of the Moso bamboos in the study site increased by 2.85% from 680.40 kg on H to 696.36 kg on L.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, X.; Du, H.; Zhou, G.; Ge, H.; Shi, Y.; Zhou, Y.; Fan, W. Estimation of aboveground carbon stock of Moso bamboo (Phyllostachys heterocycla var. pubescens) forest with a Landsat Thematic Mapper image. Int. J. Remote Sens. 2011, 32, 1431–1448. [Google Scholar] [CrossRef]
- Yuen, J.Q.; Fung, T.; Ziegler, A.D. Carbon stocks in bamboo ecosystems worldwide: Estimates and uncertainties. For. Ecol. Manag. 2017, 393, 113–138. [Google Scholar] [CrossRef]
- FAO. State of the World’s Forests 2014: Enhancing the Socioeconomic Benefits from Forests; FAO: Roma, Italy, 2014. [Google Scholar]
- Xu, J.D. The 8th Forest resourcements inventory results and analysis in China. For. Econ. 2014, 3, 6–8. [Google Scholar]
- Cao, L.; Coops, N.C.; Sun, Y.; Ruan, H.; She, G. Estimating canopy structure and biomass in bamboo forests using airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2019, 148, 114–129. [Google Scholar] [CrossRef]
- Brown, S.; Gillespie, A.J.; Lugo, A.E. Biomass estimation methods for tropical forests with applications to forest inventory data. For. Sci. 1989, 35, 881–902. [Google Scholar]
- Khan, I.A.; Khan, W.R.; Ali, A.; Nazre, M. Assessment of above-ground biomass in pakistan forest ecosystem’s carbon pool: A review. Forests 2021, 12, 586. [Google Scholar] [CrossRef]
- Shen, X.; Jiang, M.; Lu, X.; Liu, X.; Liu, B.; Zhang, J.; Wang, Z. Aboveground biomass and its spatial distribution pattern of herbaceous marsh vegetation in China. Sci. China Earth Sci. 2021, 64, 1115–1125. [Google Scholar] [CrossRef]
- Wai, P.; Su, H.; Li, M. Estimating Aboveground Biomass of Two Different Forest Types in Myanmar from Sentinel-2 Data with Machine Learning and Geostatistical Algorithms. Remote Sens. 2022, 14, 2146. [Google Scholar] [CrossRef]
- Gibbs, H.K.; Brown, S.; Niles, J.O.; Foley, J.A. Monitoring and estimating tropical forest carbon stocks: Making REDD a reality. Environ. Res. Lett. 2007, 2, 045023. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M.; Kim, S.H. Retrieval of effective leaf area index in heterogeneous forests with terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2012, 51, 777–786. [Google Scholar] [CrossRef]
- Wang, D.; Liang, X.; Mofack, G.I.; Martin-Ducup, O. Individual tree extraction from terrestrial laser scanning data via graph pathing. For. Ecosyst. 2021, 8, 67. [Google Scholar] [CrossRef]
- Feldpausch, T.R.; Lloyd, J.; Lewis, S.L.; Brienen, R.J.; Gloor, M.; Monteagudo Mendoza, A.; Lopez-Gonzalez, G.; Banin, L.; Abu Salim, K.; Affum-Baffoe, K. Tree height integrated into pantropical forest biomass estimates. Biogeosciences 2012, 9, 3381–3403. [Google Scholar] [CrossRef]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K. Imputation of individual longleaf pine (Pinus palustris Mill.) tree attributes from field and LiDAR data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; López-Sánchez, C.A.; Armesto, J. Automatic dendrometry: Tree detection, tree height and diameter estimation using terrestrial laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 164–174. [Google Scholar] [CrossRef]
- Simonse, M.; Aschoff, T.; Spiecker, H.; Thies, M. Automatic Determination of Forest Inventory Parameters Using Terrestrial Laserscanning. In Proceedings of the ScandLaser Scientific Workshop on Airborne Laser Scanning of Forests, Umeå, Sweden, 3–4 September 2003; pp. 251–257. [Google Scholar]
- Edson, C.; Wing, M.G. Airborne light detection and ranging (LiDAR) for individual tree stem location, height, and biomass measurements. Remote Sens. 2011, 3, 2494–2528. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar]
- Maas, H.G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Xing, W.L.; Xing, Y.Q.; Huang, Y.; Qu, L.; You, H.T. Individual tree segmentation of TLS point cloud data based on clustering of voxels layer by layer. J. Cent. S. Univ. Forest. Technol. 2017, 37, 58–6471. [Google Scholar]
- Su, Z.; Li, S.; Liu, H.; Liu, Y. Extracting wood point cloud of individual trees based on geometric features. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1294–1298. [Google Scholar] [CrossRef]
- Wang, J.; Chen, X.; Cao, L.; An, F.; Chen, B.; Xue, L.; Yun, T. Individual rubber tree segmentation based on ground-based LiDAR data and faster R-CNN of deep learning. Forests 2019, 10, 793. [Google Scholar] [CrossRef]
- Zhang, R.; Zhou, X.; Ouyang, Z.; Avitabile, V.; Qi, J.; Chen, J.; Giannico, V. Estimating aboveground biomass in subtropical forests of China by integrating multisource remote sensing and ground data. Remote Sens. Environ. 2019, 232, 111341. [Google Scholar] [CrossRef]
- Lin, J.; Wang, M.; Ma, M.; Lin, Y. Aboveground tree biomass estimation of sparse subalpine coniferous forest with UAV oblique photography. Remote Sens. 2018, 10, 1849. [Google Scholar] [CrossRef]
- Bazezew, M.N.; Hussin, Y.A.; Kloosterman, E. Integrating Airborne LiDAR and Terrestrial Laser Scanner forest parameters for accurate above-ground biomass/carbon estimation in Ayer Hitam tropical forest, Malaysia. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 638–652. [Google Scholar] [CrossRef]
- Garms, C.G.; Strimbu, B.M. Impact of stem lean on estimation of Douglas-fir (Pseudotsuga menziesii) diameter and volume using mobile lidar scans. Can. J. For. Res. 2021, 51, 1117–1130. [Google Scholar] [CrossRef]
- Vitter, J.S. Faster methods for random sampling. Commun. ACM 1984, 27, 703–718. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D point cloud based object maps for household environments. Robot. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Wang, D.; Hollaus, M.; Pfeifer, N. Feasibility of machine learning methods for separating wood and leaf points from terrestrial laser scanning data. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2017, 4, 157–164. [Google Scholar] [CrossRef]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2011, 50, 661–670. [Google Scholar] [CrossRef]
- Barber, C.B.; Dobkin, D.P.; Huhdanpaa, H. The quickhull algorithm for convex hulls. ACM Trans. Math. Softw. 1996, 22, 469–483. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- West, P.W. Tree and Forest Measurement; Springer: Berlin/Heidelberg, Germany, 2003; pp. 39–44. [Google Scholar]
- Hou, H.; Andrews, H. Cubic splines for image interpolation and digital filtering. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 508–517. [Google Scholar]
- Liu, M.; Huang, Y.; Yin, L. Development and implementation of a NURBS interpolator with smooth feedrate scheduling for CNC machine tools. Int. J. Mach. Tools Manuf. 2014, 87, 1–15. [Google Scholar] [CrossRef]
- You, L.; Ha, D.L.; Xie, M.K.; Zhang, X.P.; Song, X.Y.; Pang, Y.; Tang, S.Z. Stem Volume Calculation Based on Stem Section Profile Curve and Three Dimension Laser Point Cloud. Sci. Silvae Sin. 2019, 55, 63–72. [Google Scholar]
- Ni, X.W.; Huang, X.; Zhu, R. A Highly-efficient Pose Synchronization Planning Method for Industrial Robot Free-form Curve Motion. Mach. Tool Hydraul. 2021, 49, 34–39, 59. [Google Scholar]
- Zheng, J.X.; Dong, W.Y. A Study on Over ground Biomass Structure of Clone Population of Natural Phyllostachys pubescens in Haiziping. For. Inventory Plan. 2009, 34, 30–33. [Google Scholar]
- Beyene, S.M. Estimation of Forest Variable and Aboveground Biomass using Terrestrial Laser Scanning in the Tropical Rainforest. J. Indian Soc. Remote Sens. 2020, 48, 853–863. [Google Scholar] [CrossRef]
- Shimizu, K.; Nishizono, T.; Kitahara, F.; Fukumoto, K.; Saito, H. Integrating terrestrial laser scanning and unmanned aerial vehicle photogrammetry to estimate individual tree attributes in managed coniferous forests in Japan. Int. J. Appl. Earth Obs. Geoinf. 2022, 106, 102658. [Google Scholar] [CrossRef]
- Lin, J.; Chen, D.; Wu, W.; Liao, X. Estimating aboveground biomass of urban forest trees with dual-source UAV acquired point clouds. Urban For. Urban Green. 2022, 69, 127521. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | No. | Min | Max | Mean |
|---|---|---|---|---|
| Measured DBH (cm) | 42 | 7.70 | 13.64 | 10.79 |
| Measured H (m) | 42 | 9.45 | 15.85 | 13.23 |
| Measured L (m) | 42 | 10.67 | 15.92 | 13.67 |
| Parameters | No. | Min | Max | Mean |
|---|---|---|---|---|
| Extracted DBH (cm) | 42 | 7.49 | 14.39 | 10.69 |
| Extracted H (m) | 42 | 9.38 | 15.24 | 13.14 |
| Extracted L (m) | 42 | 10.83 | 15.85 | 13.58 |
| AGB | No. | Min | Max | Mean |
|---|---|---|---|---|
| (kg) | 42 | 7.82 | 25.48 | 16.12 |
| (kg) | 42 | 8.01 | 25.62 | 16.58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, R.; Lin, J.; Li, T. Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud. Remote Sens. 2022, 14, 5537. https://doi.org/10.3390/rs14215537
Jiang R, Lin J, Li T. Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud. Remote Sensing. 2022; 14(21):5537. https://doi.org/10.3390/rs14215537
Chicago/Turabian StyleJiang, Rui, Jiayuan Lin, and Tianxi Li. 2022. "Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud" Remote Sensing 14, no. 21: 5537. https://doi.org/10.3390/rs14215537
APA StyleJiang, R., Lin, J., & Li, T. (2022). Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud. Remote Sensing, 14(21), 5537. https://doi.org/10.3390/rs14215537