

A Novel Water Index Fusing SAR and Optical Imagery (SOWI)
 , ,
, ,
Abstract
1. Introduction
2. Study Area and Data
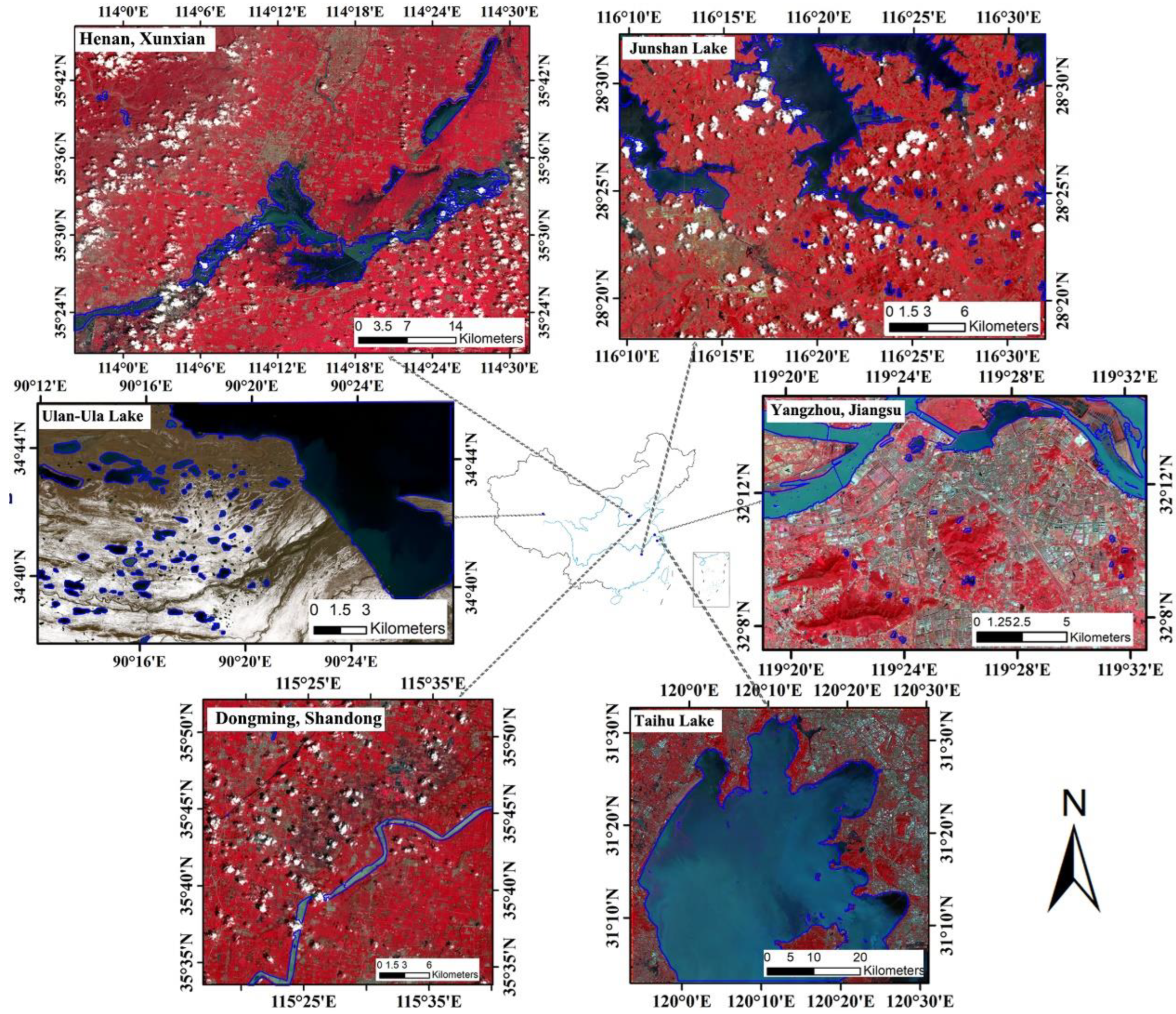
2.1. Study Area
2.2. Satellite Data Collection and Preprocessing
3. Methods
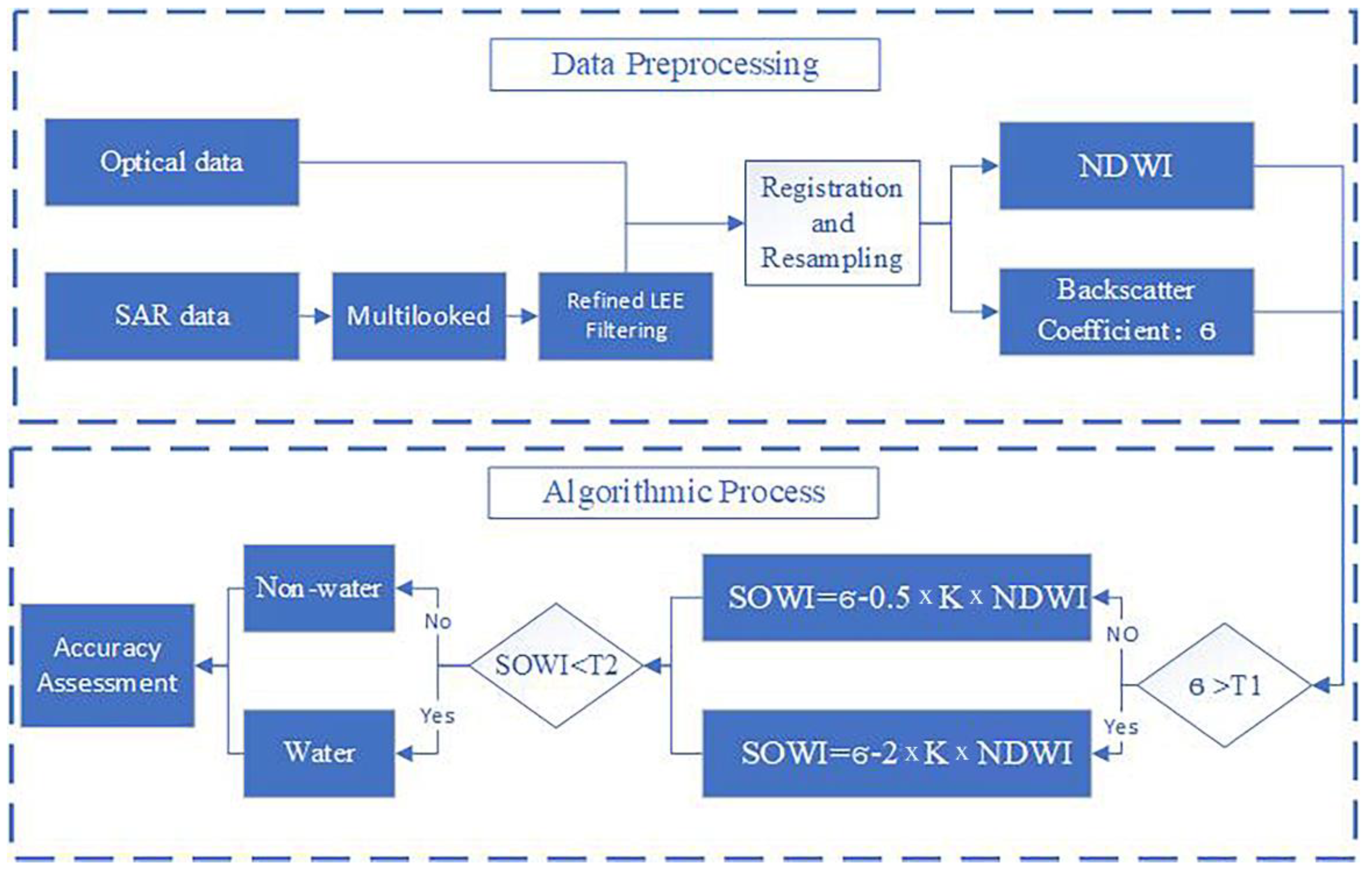
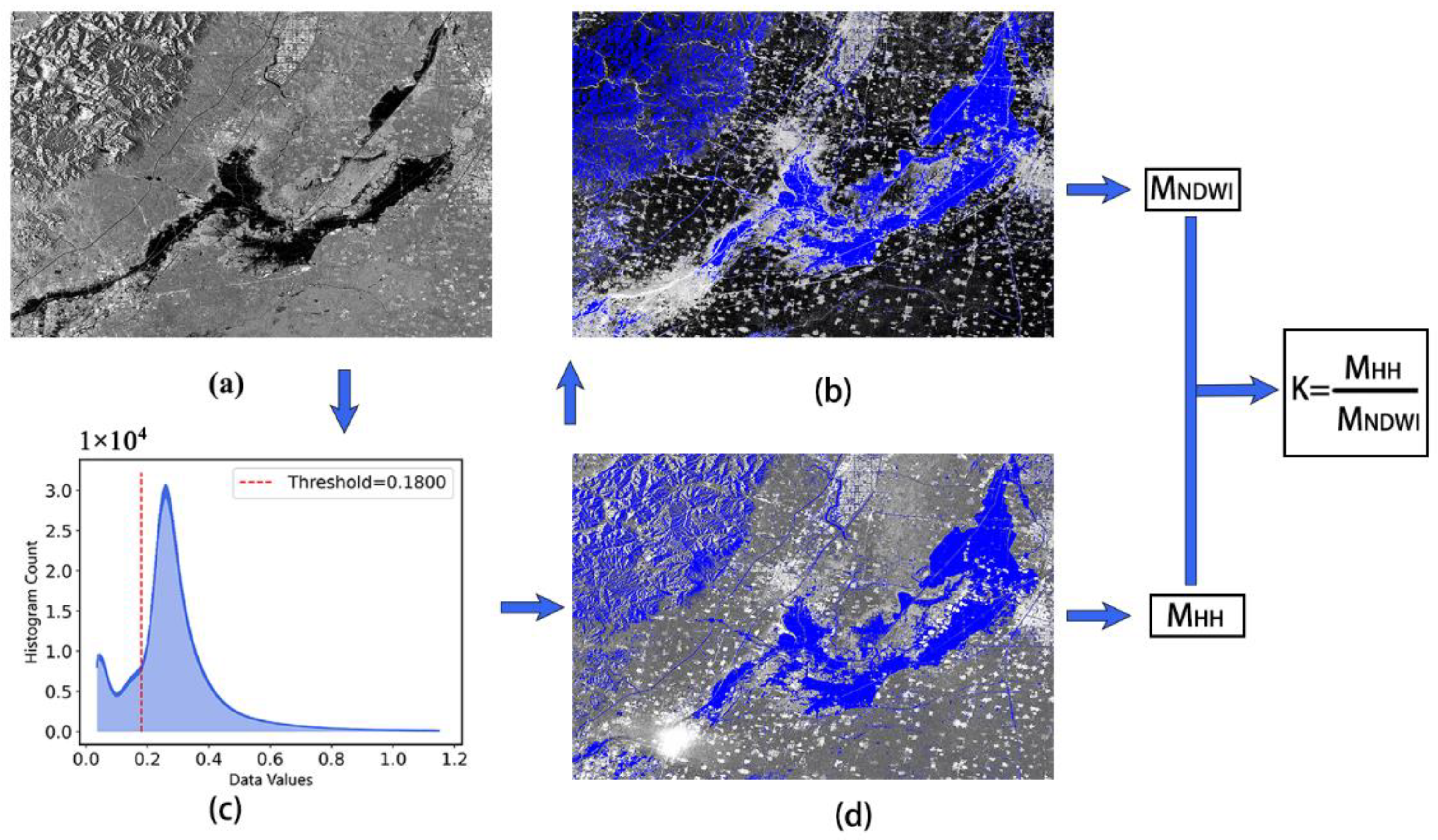
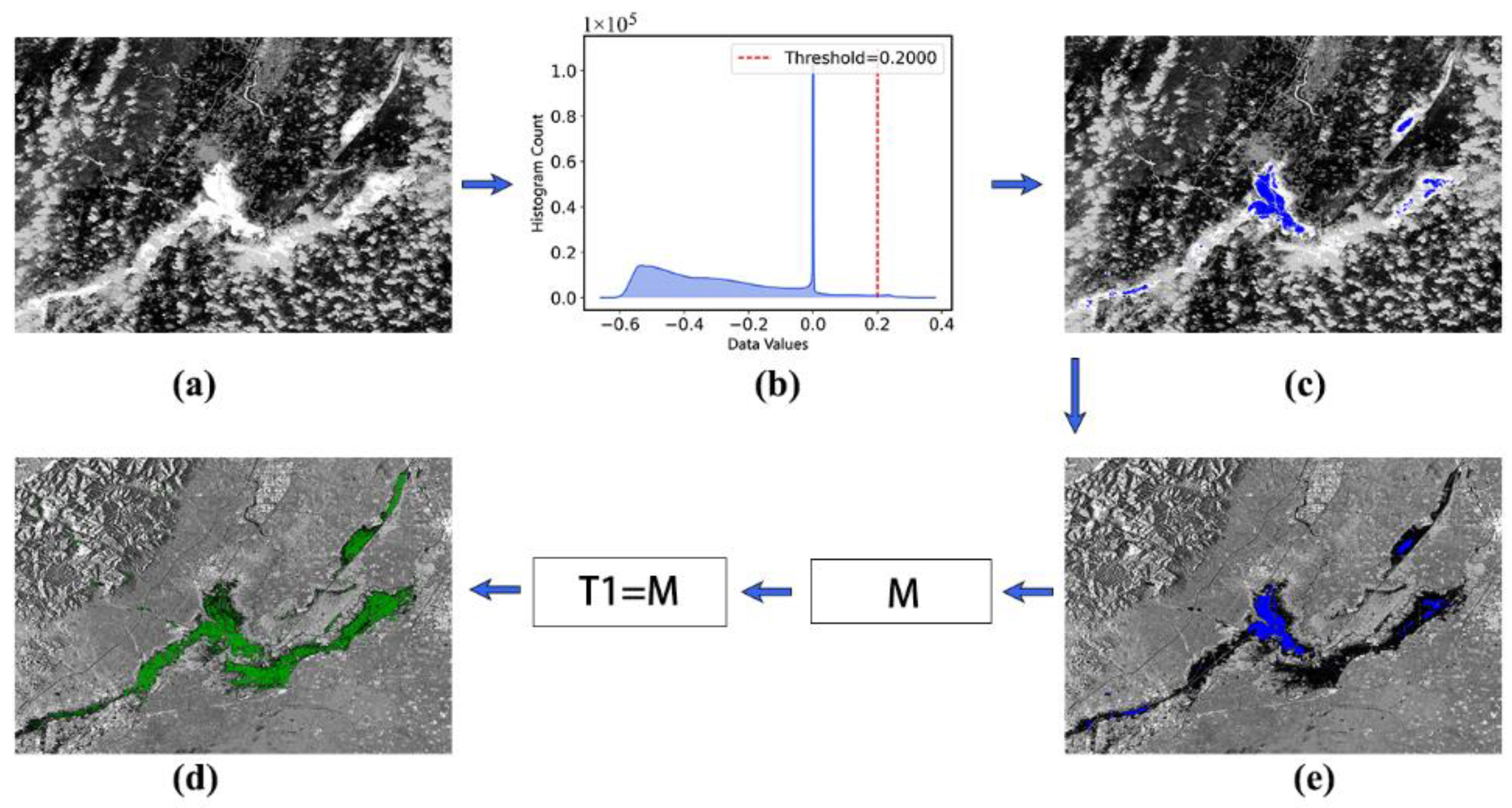
3.1. Technical Framework
3.2. SOWI Model Building
3.3. Extraction of Water Based on Visual Interpretation
3.4. Accuracy Evaluation
4. Results and Analysis
4.1. Overview
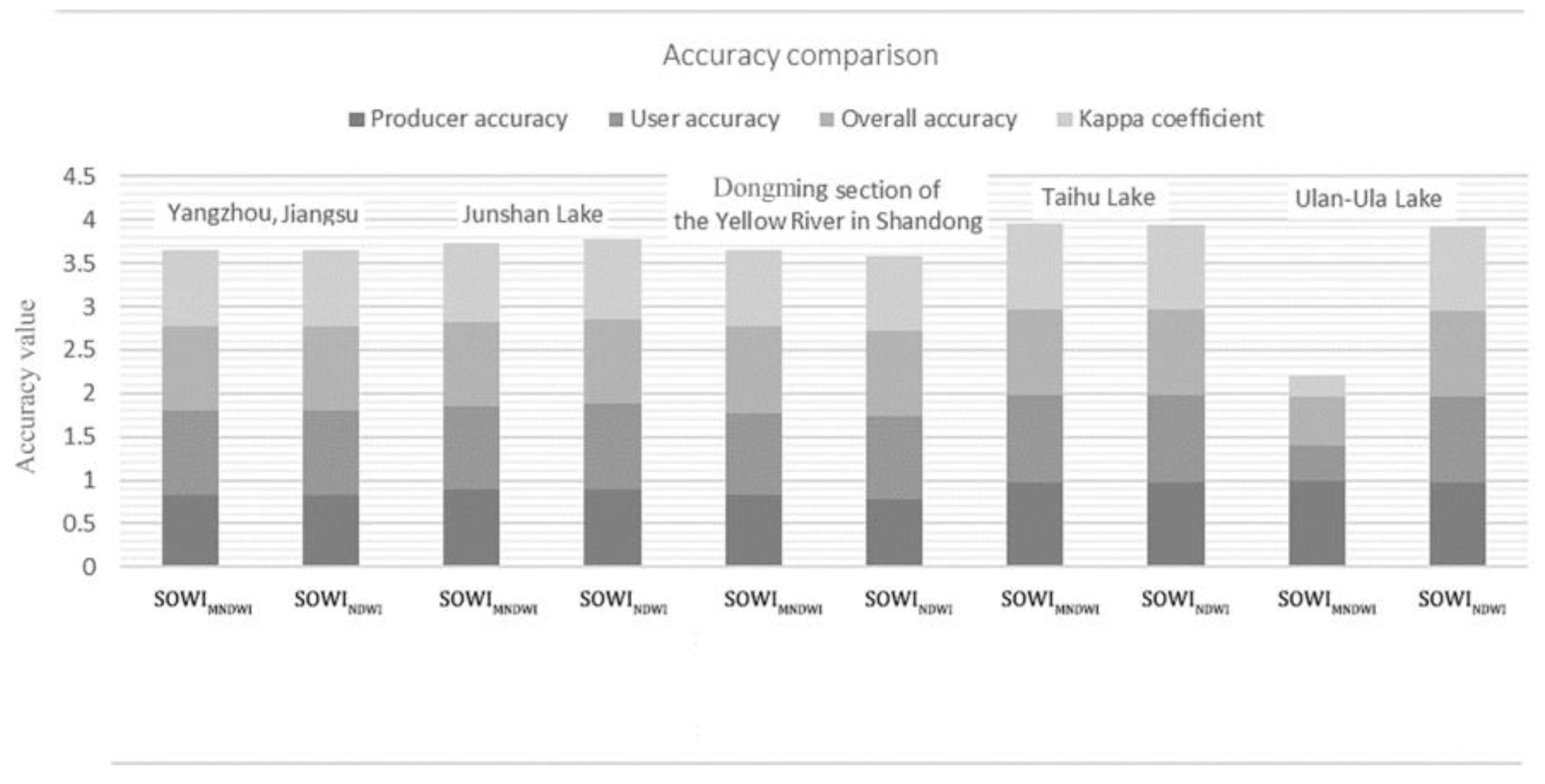
4.2. Precision Analysis and Evaluation
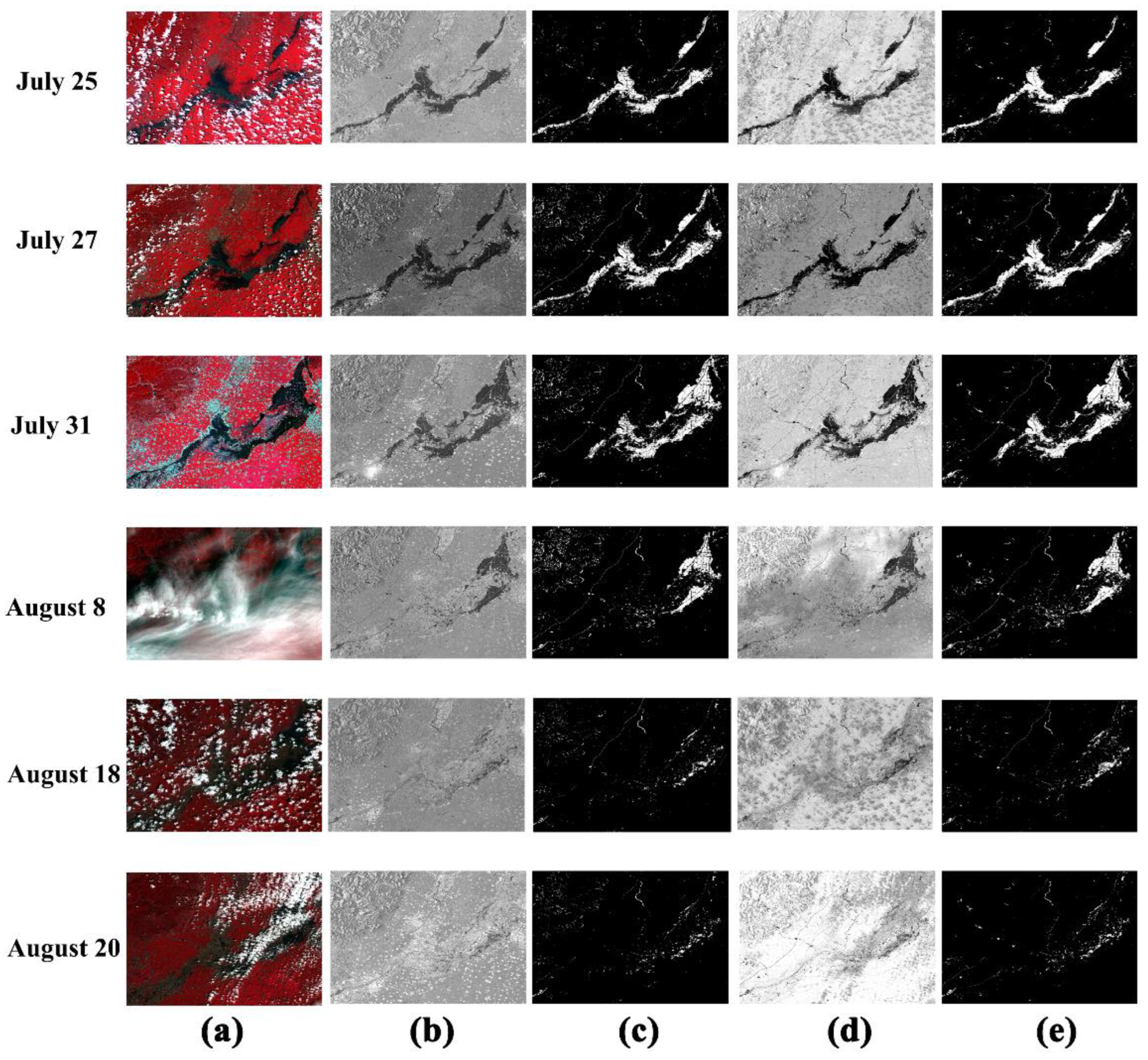
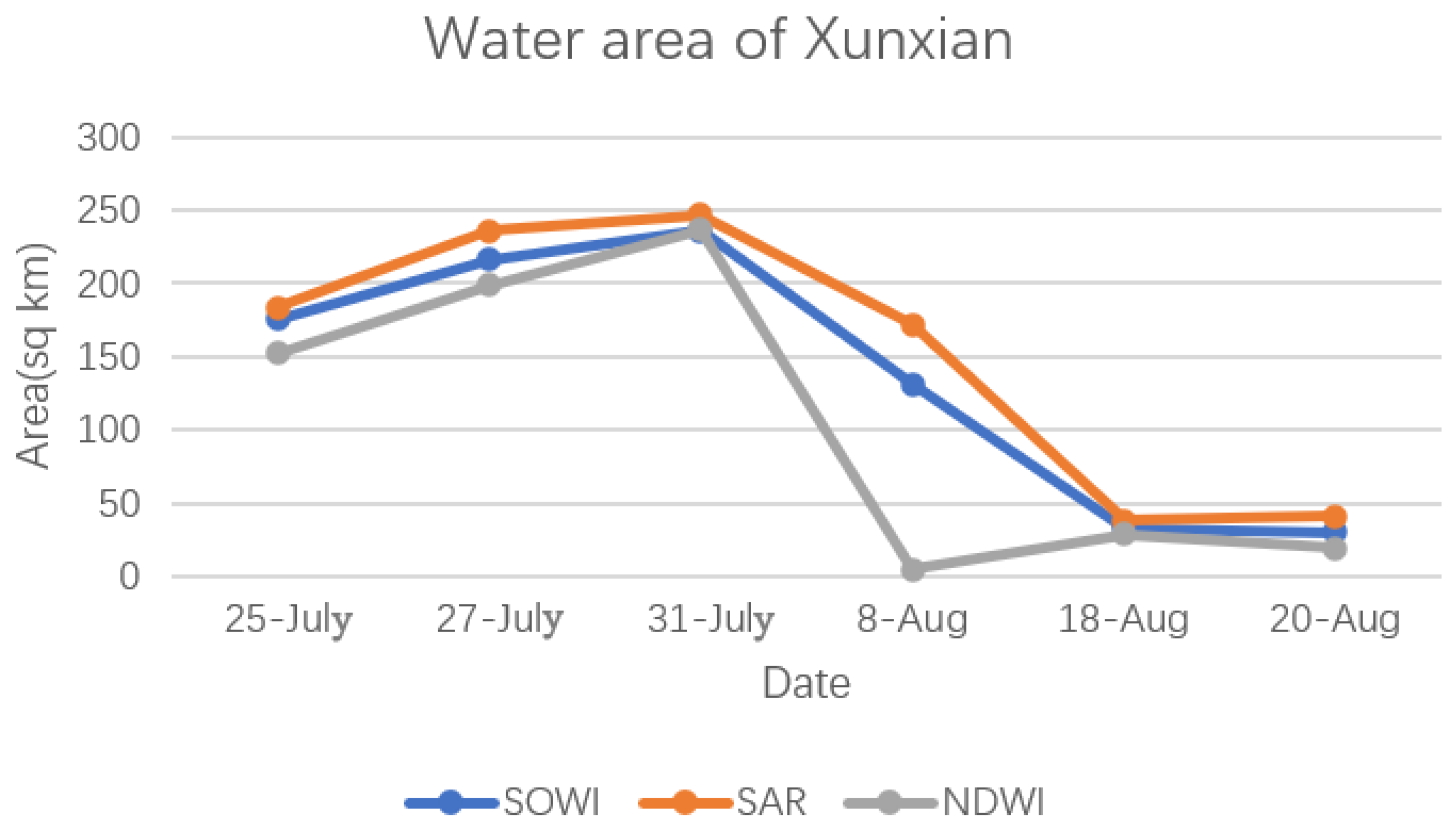
4.3. Case Study
4.3.1. Accuracy Evaluation of the Long Time Series Frequency Map Level
4.3.2. Accuracy Evaluation on the Pixel Level
5. Discussion
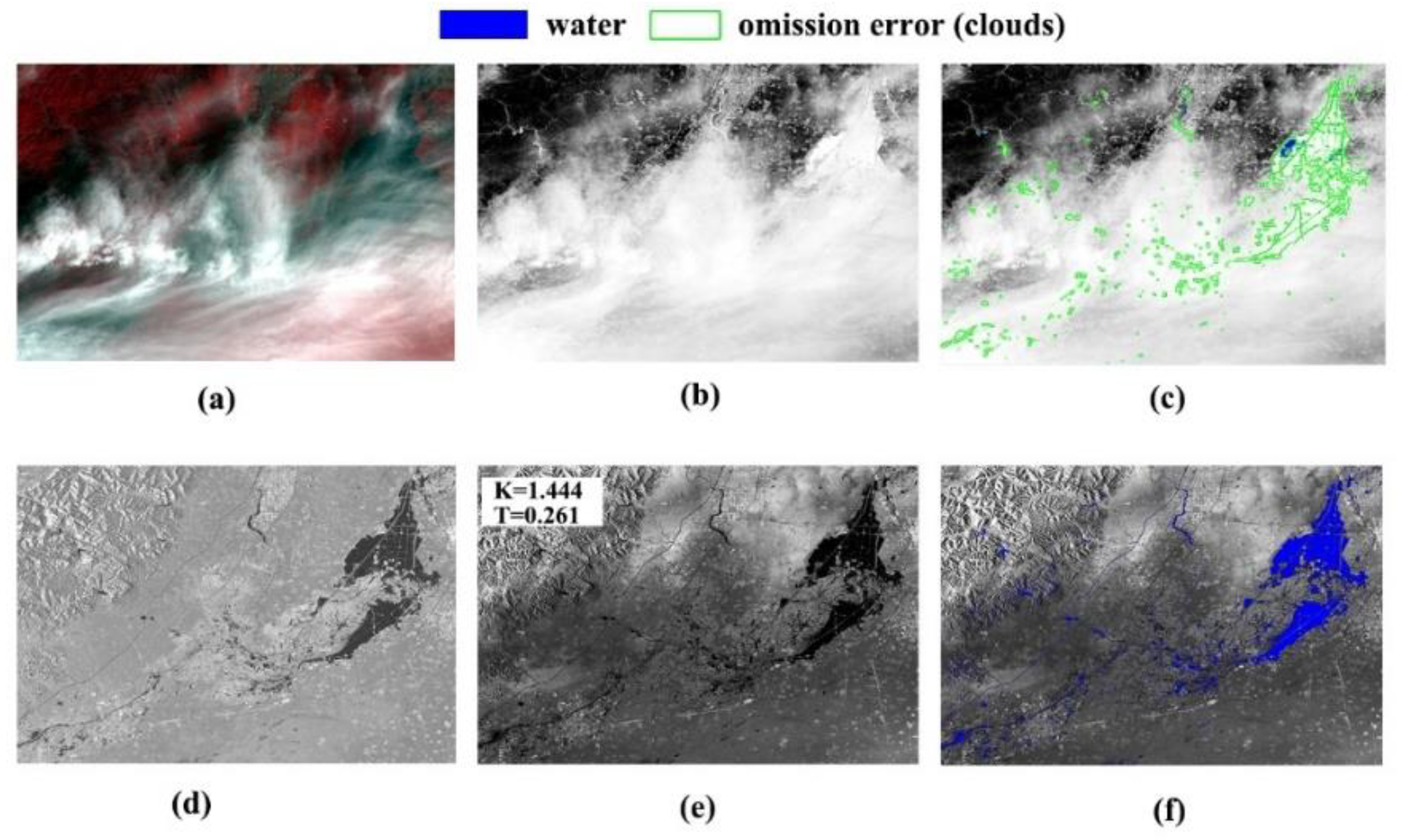
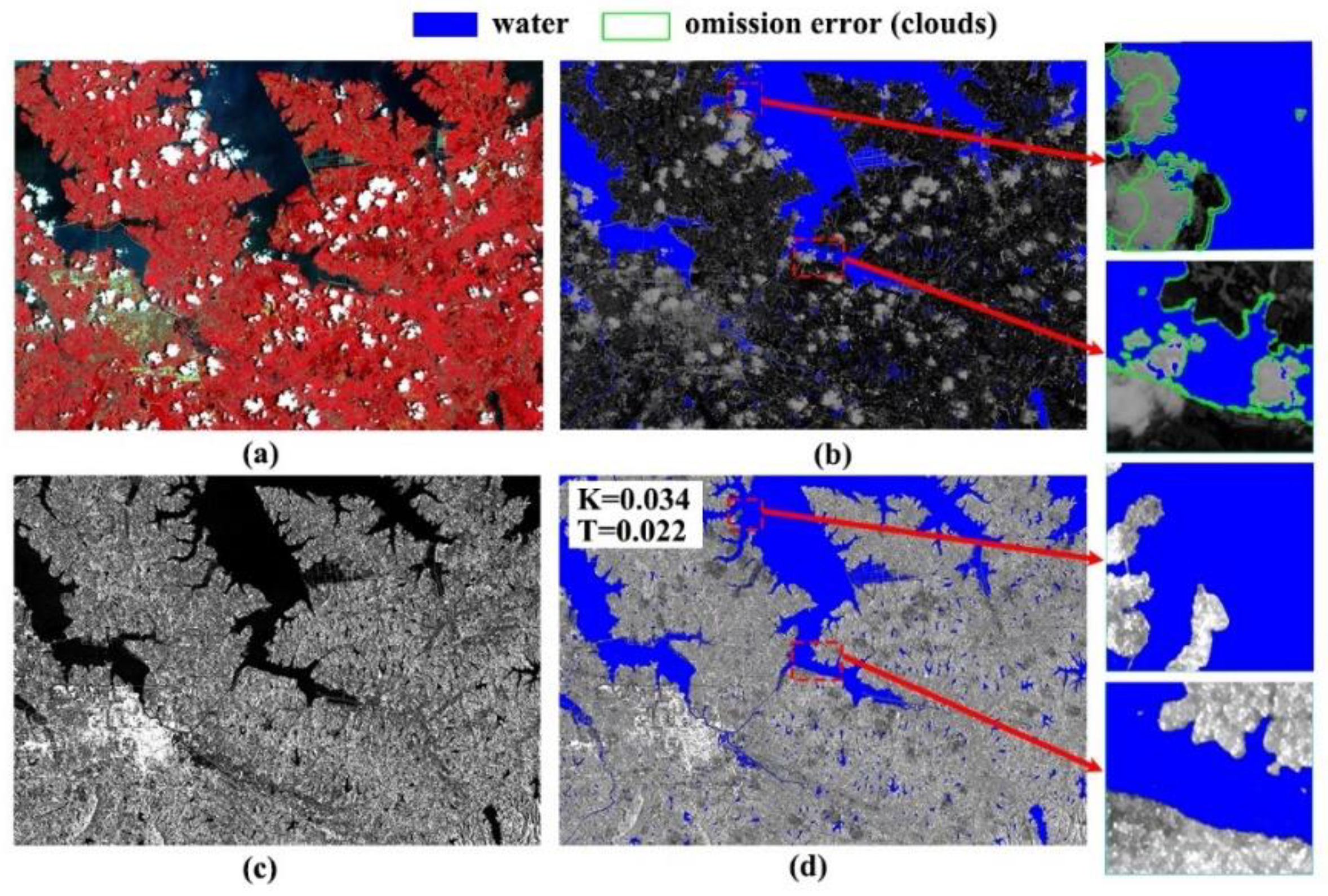
5.1. Waterbodies Covered by Clouds
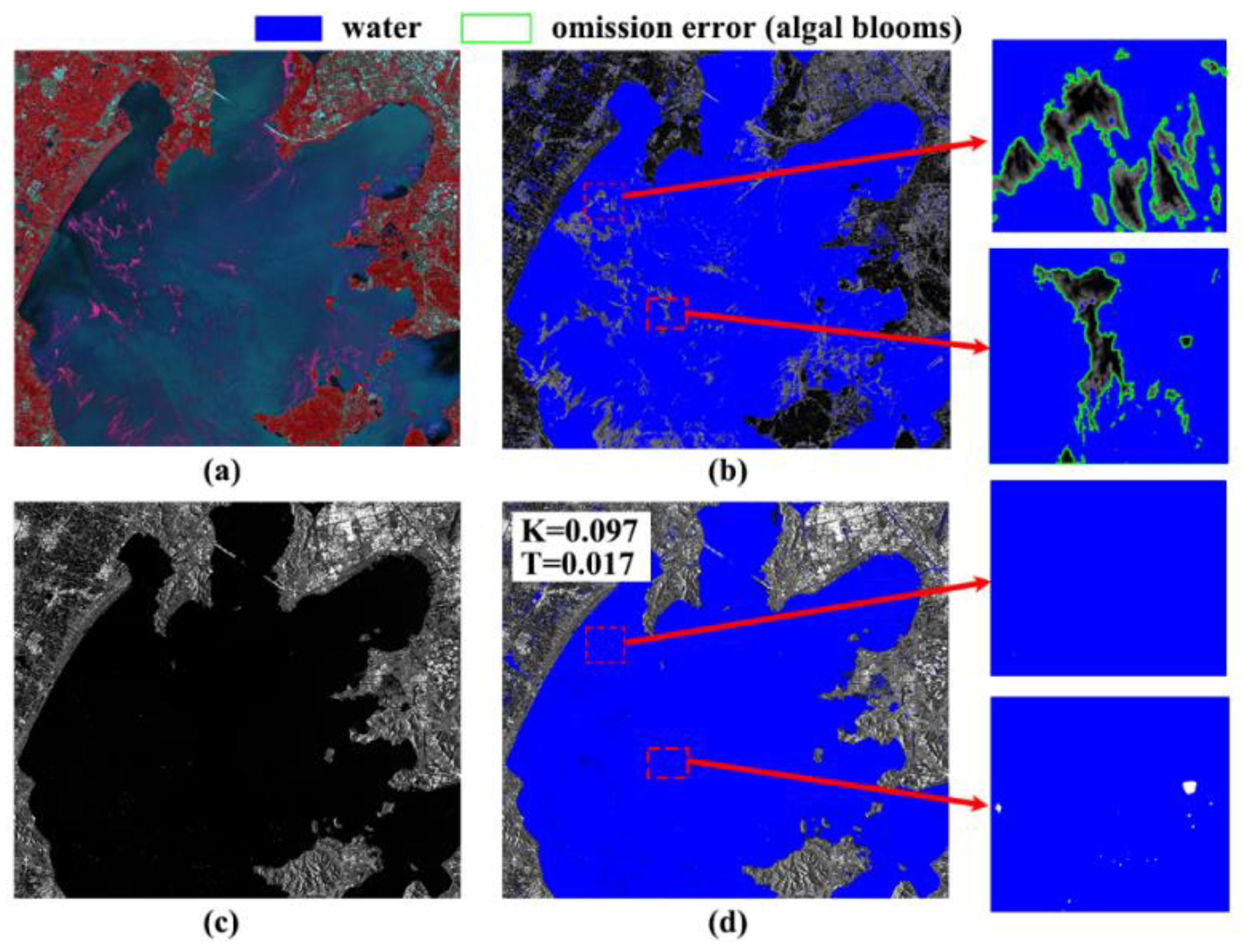
5.2. Waterbodies Covered by Algal Blooms
5.3. Uneven Water and Smooth Terrain
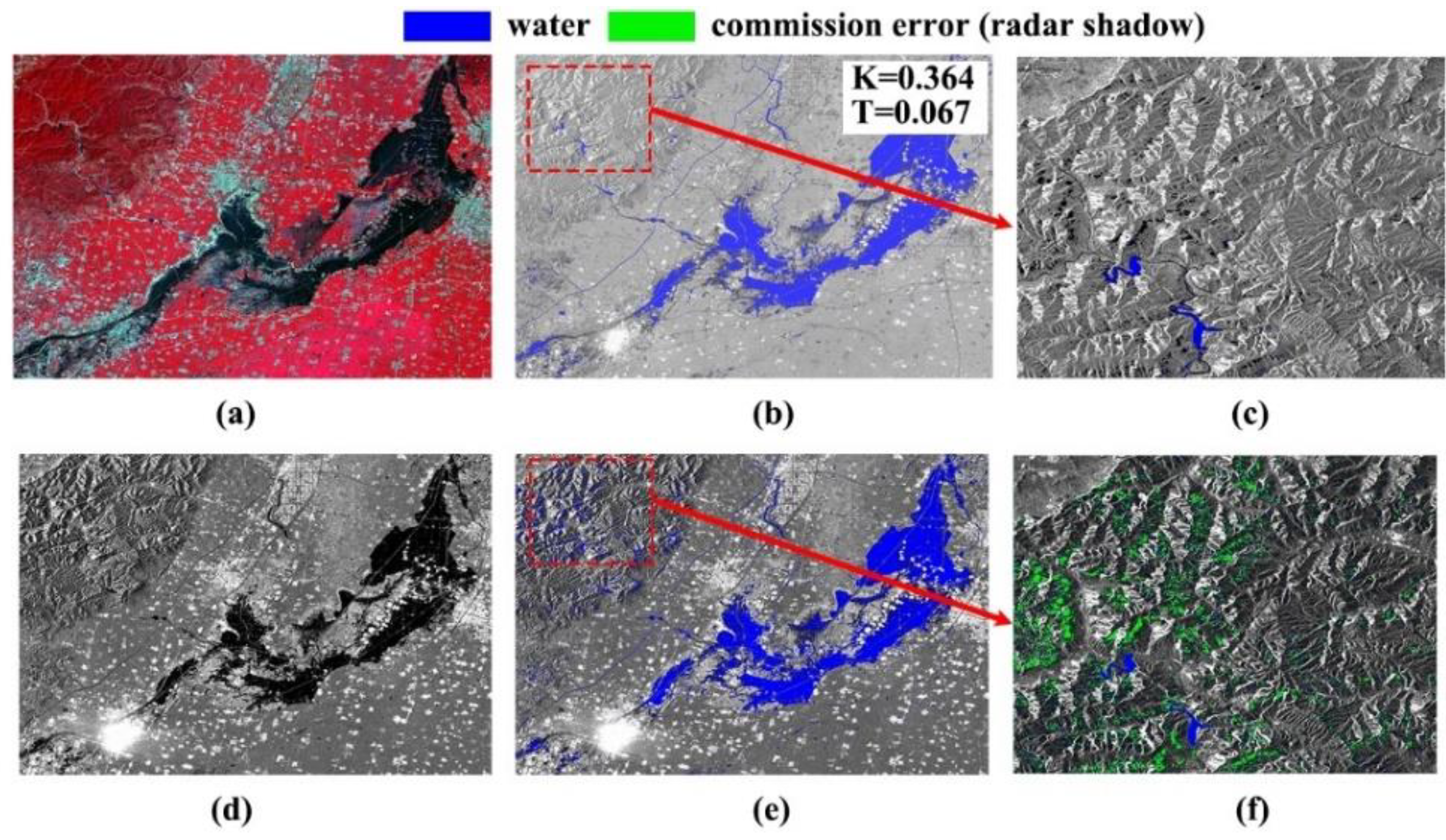
5.4. Radar Shadow
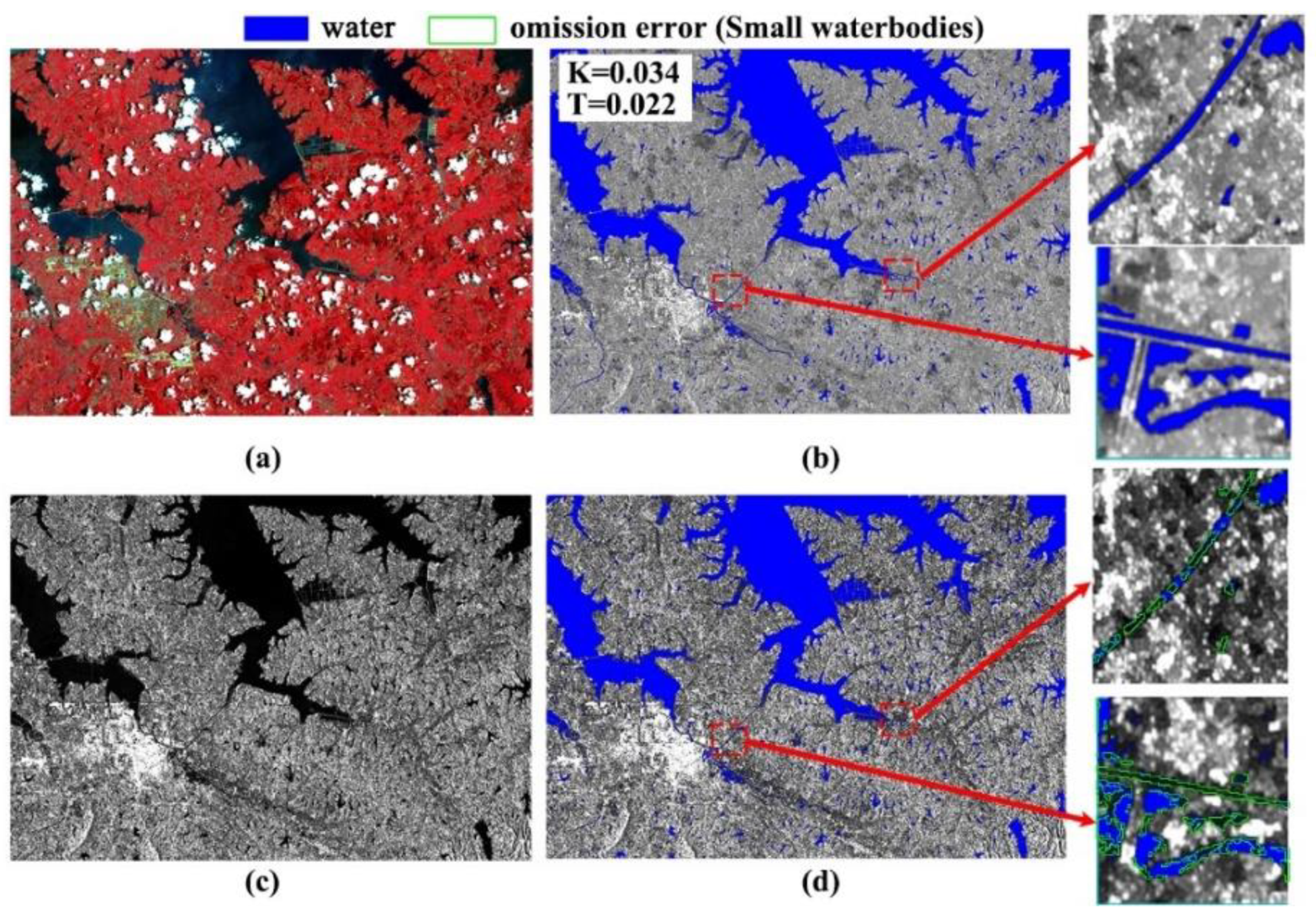
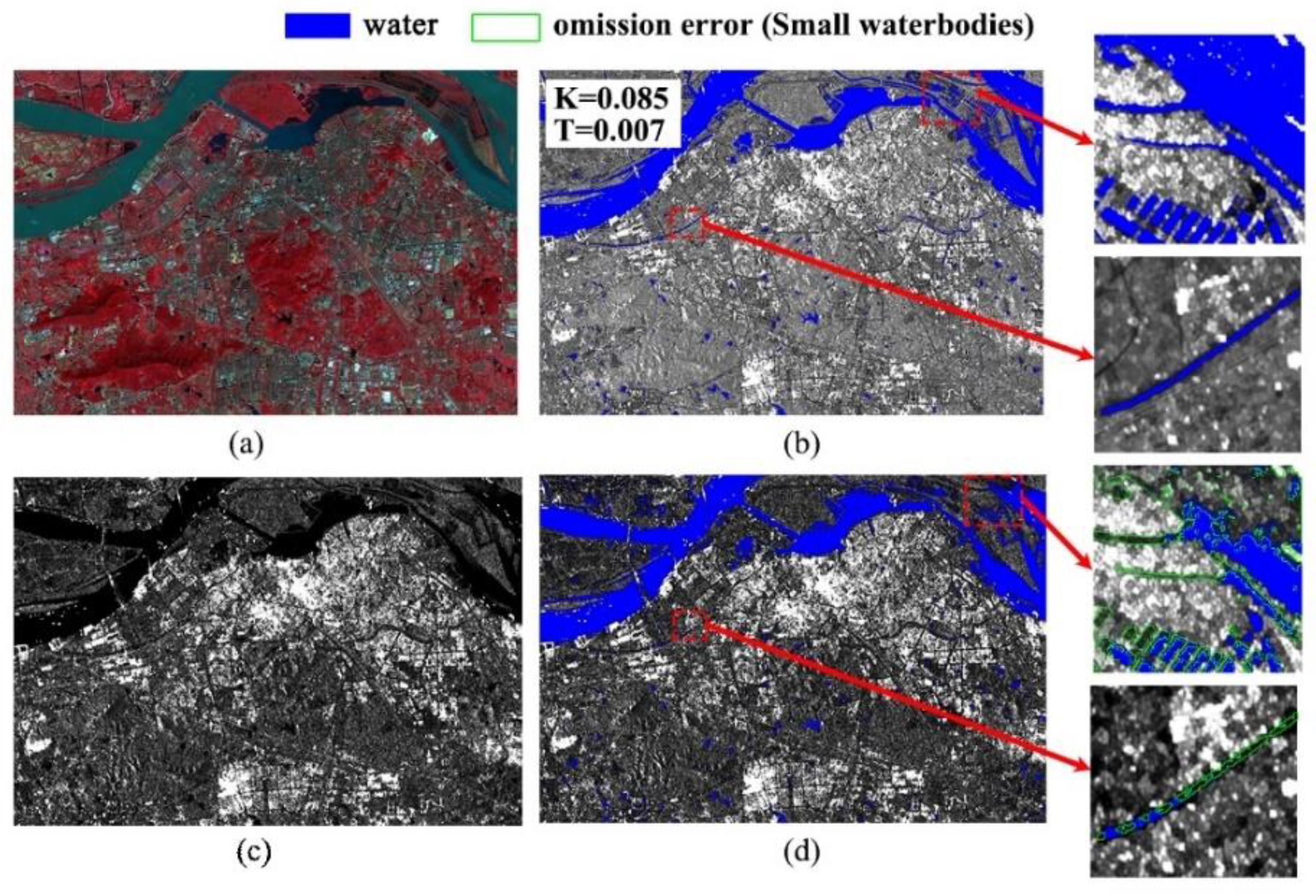
5.5. Small Waterbodies
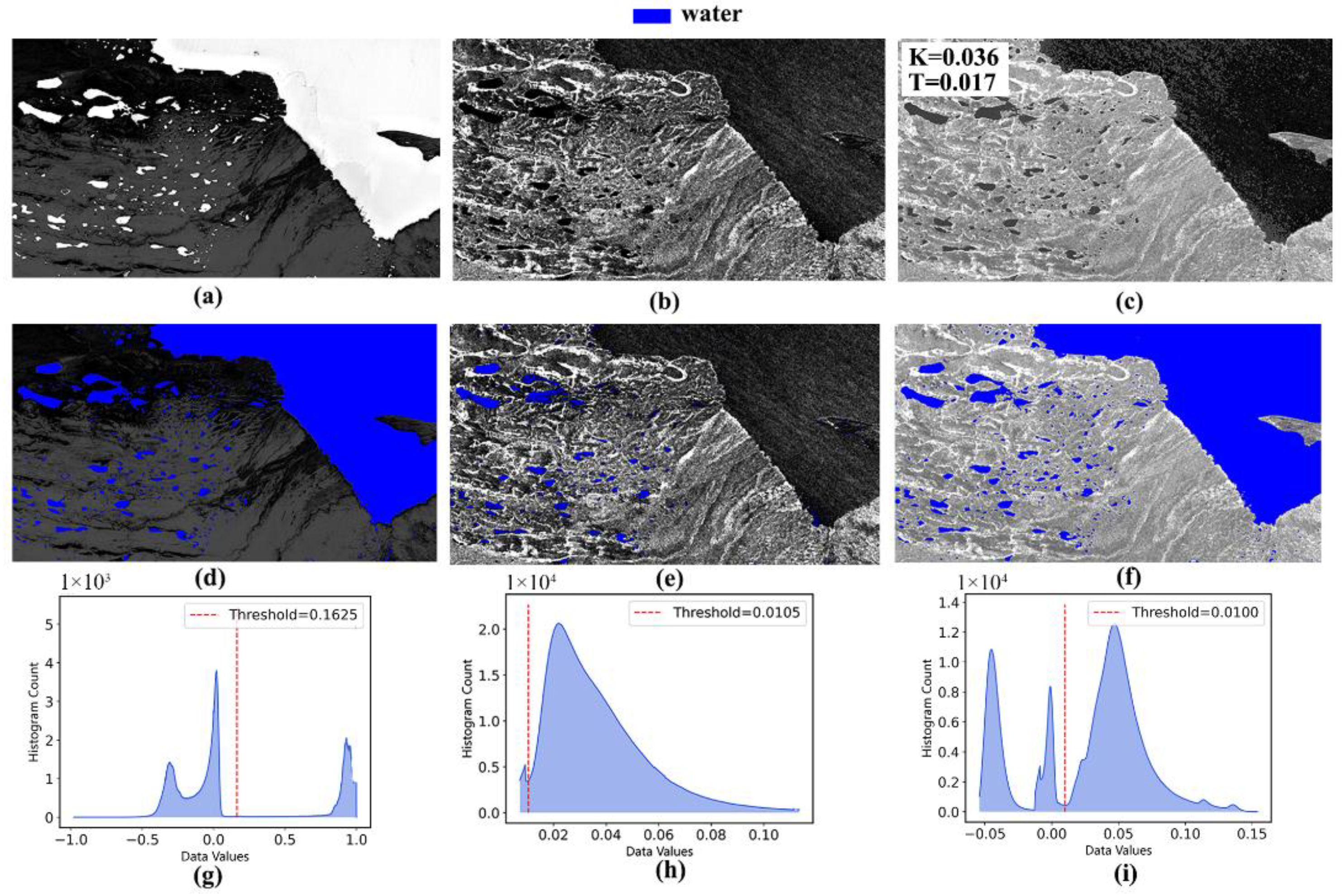
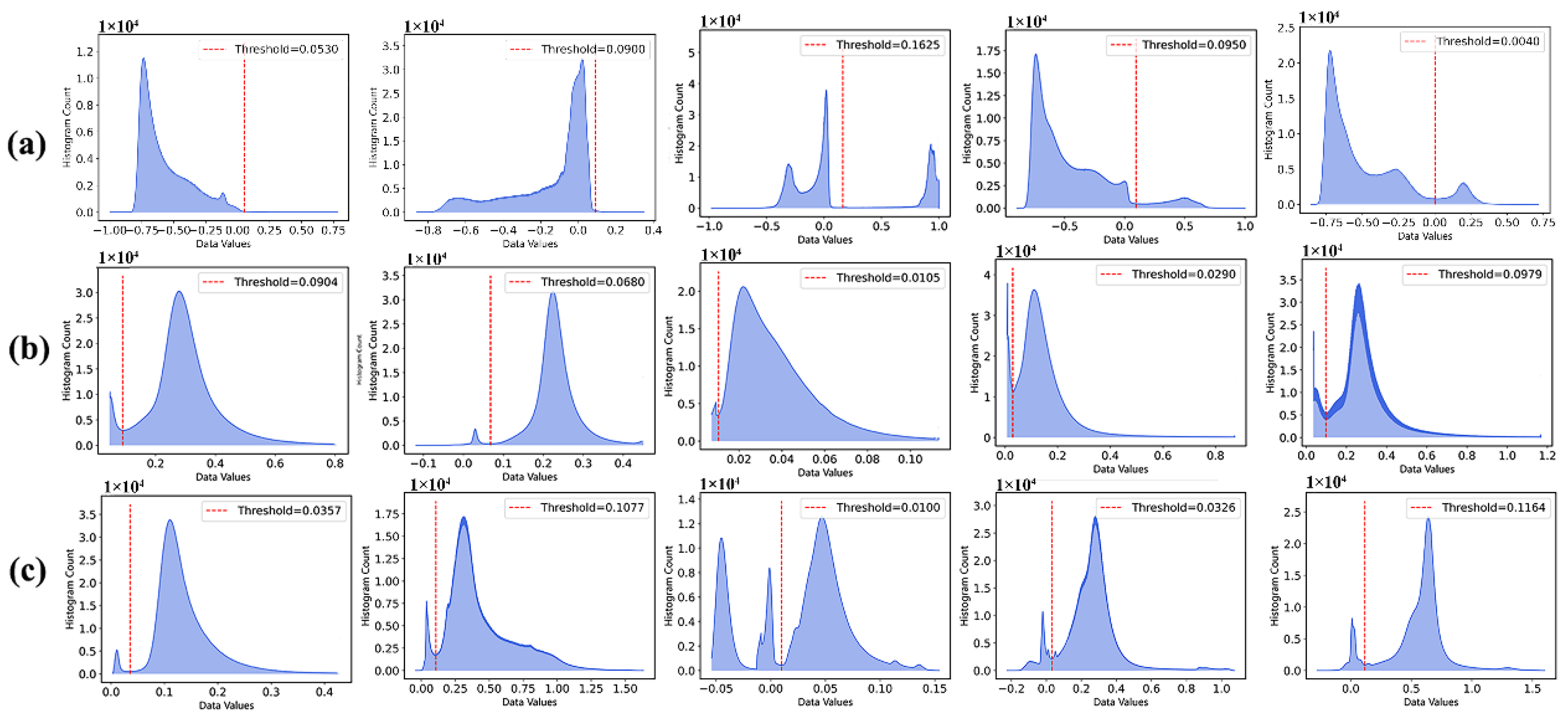
5.6. Histogram
5.7. Precision Analysis of Different SOWI Types
5.8. Limitations of SOWI
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Druce, D.; Tong, X.Y.; Lei, X.; Guo, T.; Kittel, C.M.M.; Grogan, K.; Tottrup, C. An Optical and SAR Based Fusion Approach for Mapping Surface Water Dynamics over Mainland China. Remote Sens. 2021, 13, 1663. [Google Scholar] [CrossRef]
- Irwin, K.; Beaulne, D.; Braun, A.; Fotopoulos, G. Fusion of SAR, Optical Imagery and Airborne LiDAR for Surface Water Detection. Remote Sens. 2017, 9, 890. [Google Scholar] [CrossRef]
- Raymond, P.A.; Hartmann, J.; Lauerwald, R.; Sobek, S.; McDonald, C.; Hoover, M.; Butman, D.; Striegl, R.; Mayorga, E.; Humborg, C.; et al. Global carbon dioxide emissions from inland waters. Nature 2013, 503, 355–359. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.L.; DeVries, B.; Huang, C.Q.; Lang, M.W.; Jones, J.W.; Creed, I.F.; Carroll, M.L. Automated Extraction of Surface Water Extent from Sentinel-1 Data. Remote Sens. 2018, 10, 797. [Google Scholar] [CrossRef]
- Gasparovic, M.; Klobucar, D. Mapping Floods in Lowland Forest Using Sentinel-1 and Sentinel-2 Data and an Object-Based Approach. Forests 2021, 12, 553. [Google Scholar] [CrossRef]
- Senay, G.B.; Schauer, M.; Friedrichs, M.; Velpuri, N.M.; Singh, R.K. Satellite-based water use dynamics using historical Landsat data (1984-2014) in the southwestern United States. Remote Sens. Environ. 2017, 202, 98–112. [Google Scholar] [CrossRef]
- Wang, C.; Jia, M.M.; Chen, N.C.; Wang, W. Long-Term Surface Water Dynamics Analysis Based on Landsat Imagery and the Google Earth Engine Platform: A Case Study in the Middle Yangtze River Basin. Remote Sens. 2018, 10, 1635. [Google Scholar] [CrossRef]
- Zhao, W. Phase research and practice of upgrading earth observation from test application to system effectiveness in China. J. Remote Sens. 2019, 23, 1036–1045. [Google Scholar]
- Zhang, Y.J.; Liu, X.Y.; Zhang, Y.; Ling, X.; Huang, X. Automatic and Unsupervised Water Body Extraction Based on Spectral-Spatial Features Using GF-1 Satellite Imagery. IEEE Geosci. Remote Sens. Lett. 2019, 16, 927–931. [Google Scholar] [CrossRef]
- Dan, L.; Baosheng, W.; Bowei, C.; Yuan, X.; Yi, Z. Review of water body information extraction based on satellite remote sensing. J. Tsinghua Univ. 2020, 60, 147–161. [Google Scholar] [CrossRef]
- Slinski, K.M.; Hogue, T.S.; McCray, J.E. Active-Passive Surface Water Classification: A New Method for high-Resolution monitoring of Surface Water Dynamics. Geophys. Res. Lett. 2019, 46, 4694–4704. [Google Scholar] [CrossRef]
- Deng, Y.; Jiang, W.G.; Tang, Z.H.; Li, J.H.; Lv, J.X.; Chen, Z.; Jia, K. Spatio-Temporal Change of Lake Water Extent in Wuhan Urban Agglomeration Based on Landsat Images from 1987 to 2015. Remote Sens. 2017, 9, 270. [Google Scholar] [CrossRef]
- Zou, Z.H.; Xiao, X.M.; Dong, J.W.; Qin, Y.W.; Doughty, R.B.; Menarguez, M.A.; Zhang, G.L.; Wang, J. Divergent trends of open-surface water body area in the contiguous United States from 1984 to 2016. Proc. Natl. Acad. Sci. USA 2018, 115, 3810–3815. [Google Scholar] [CrossRef]
- Sharma, R.C.; Tateishi, R.; Hara, K.; Nguyen, L.V. Developing Superfine Water Index (SWI) for Global Water Cover Mapping Using MODIS Data. Remote Sens. 2015, 7, 13807–13841. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Bing, Z.; Junsheng, L.; Qian, S.; Yanhong, W.; Fangfang, Z.; Shenglei, W.; Yue, Y.; Linan, G.; Ziyao, Y. Recent research progress on long time series and large scale optical remote sensing of inland water. J. Remote Sens. 2021, 25, 37–52. [Google Scholar]
- Yuchen, L.; Yongnian, G. Surface water extraction in Yangtze River Basin based on sentinel time series image. J. Remote Sens. 2022, 26, 358–372. [Google Scholar]
- Kaplan, G.; Avdan, U. Object-based water body extraction model using Sentinel-2 satellite imagery. Eur. J. Remote Sens. 2017, 50, 137–143. [Google Scholar] [CrossRef]
- Jones, J.W. Efficient Wetland Surface Water Detection and Monitoring via Landsat: Comparison with in situ Data from the Everglades Depth Estimation Network. Remote Sens. 2015, 7, 12503–12538. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Zheng, G.X.; Gao, Y.; Xiang, Y.; Lei, Y.B.; Li, J.L. Automated Water Classification in the Tibetan Plateau Using Chinese GF-1 WFV Data. Photogramm. Eng. Remote Sens. 2017, 83, 509–519. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. J. Remote Sens. 2005, 27, 589–595. [Google Scholar] [CrossRef]
- Kaiyuan, D.; Chao, R. Water extraction model of multispectral optical remote sensing image. Acta. Geod. Et. Cartogr. Sin. 2021, 50, 1370–1379. [Google Scholar]
- Zhou, Y.A.; Luo, J.C.; Shen, Z.F.; Hu, X.D.; Yang, H.P. Multiscale Water Body Extraction in Urban Environments from Satellite Images. IEEE J-Stars 2014, 7, 4301–4312. [Google Scholar] [CrossRef]
- Ahmad, S.K.; Hossain, F.; Eldardiry, H.; Pavelsky, T.M. A Fusion Approach for Water Area Classification Using Visible, Near Infrared and Synthetic Aperture Radar for South Asian Conditions. IEEE Trans Geosci Remote Sens. 2020, 58, 2471–2480. [Google Scholar] [CrossRef]
- Grimaldi, S.; Xu, J.; Li, Y.; Pauwels, V.R.N.; Walker, J.P. Flood mapping under vegetation using single SAR acquisitions. Remote Sens. Environ. 2020, 237, 111582. [Google Scholar] [CrossRef]
- Liang, J.Y.; Liu, D.S. A local thresholding approach to flood water delineation using Sentinel-1 SAR imagery. ISPRS J. Photogramm 2020, 159, 53–62. [Google Scholar] [CrossRef]
- Shen, X.Y.; Wang, D.C.; Mao, K.B.; Anagnostou, E.; Hong, Y. Inundation Extent Mapping by Synthetic Aperture Radar: A Review. Remote Sens. 2019, 11, 879. [Google Scholar] [CrossRef]
- Liu, X.Y.; Liu, L.; Shao, Y.; Zhao, Q.H.; Zhang, Q.J.; Lou, L.J. Water Detection in Urban Areas from GF-3. Sensors 2018, 18, 1299. [Google Scholar] [CrossRef]
- Prigent, C.; Matthews, E.; Aires, F.; Rossow, W.B. Remote sensing of global wetland dynamics with multiple satellite data sets. Geophys. Res. Lett. 2001, 28, 4631–4634. [Google Scholar] [CrossRef]
- White, L.; Brisco, B.; Dabboor, M.; Schmitt, A.; Pratt, A. A Collection of SAR Methodologies for Monitoring Wetlands. Remote Sens. 2015, 7, 7615–7645. [Google Scholar] [CrossRef]
- Wang, G.L. Active and Passive Remote Sensing Monitoring of Cyanobacterial Blooms in Inland Waters; East China Normal University: Shanghai, China, 2015. [Google Scholar]
- Zeng, C.Q.; Wang, J.F.; Huang, X.D.; Bird, S.; Luce, J.J. Urban water body detection from the combination of high-resolution optical and SAR images. In Proceedings of the JURSE, Lausanne, Switzerland, 30 March–1 April 2015. [Google Scholar]
- Hong, S.; Jang, H.; Kim, N.; Sohn, H.G. Water Area Extraction Using RADARSAT SAR Imagery Combined with Landsat Imagery and Terrain Information. Sensors 2015, 15, 6652–6667. [Google Scholar] [CrossRef] [PubMed]
- Long, J.; Ding, X.; Wang, C. Complex Coherence Estimation Based on Adaptive Refined Lee Filter. Acta Geod. Et Cartogr. Sin. 2015, 44, 1331–1339. [Google Scholar]
- Jiang, W.H.; Yu, A.X.; Dong, Z.; Wang, Q.S. Comparison and Analysis of Geometric Correction Models of Spaceborne SAR. Sensors 2016, 16, 973. [Google Scholar] [CrossRef]
- Twele, A.; Cao, W.X.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Clement, M.A.; Kilsby, C.G.; Moore, P. Multi-temporal synthetic aperture radar flood mapping using change detection. J. Flood Risk Manag. 2018, 11, 152–168. [Google Scholar] [CrossRef]
- Wang, G.; Wu, M.; Wei, X.; Song, H. Water Identification from High-Resolution Remote Sensing Images Based on Multidimensional Densely Connected Convolutional Neural Networks. Remote Sens. 2020, 12, 795. [Google Scholar] [CrossRef]
- Jiang, W.; He, G.; Long, T.; Ni, Y.; Liu, H.; Peng, Y.; Lv, K.; Wang, G. Multilayer Perceptron Neural Network for Surface Water Extraction in Landsat 8 OLI Satellite Images. Remote Sens. 2018, 10, 755. [Google Scholar] [CrossRef]
- Rogers, A.S.; Kearney, M.S. Reducing signature variability in unmixing coastal marsh Thematic Mapper scenes using spectral indices. Int. J. Remote Sens. 2004, 25, 2317–2335. [Google Scholar] [CrossRef]
- Chen, L.F.; Zhang, P.; Xing, J.; Li, Z.H.; Xing, X.M.; Yuan, Z.H. A Multi-Scale Deep Neural Network for Water Detection from SAR Images in the Mountainous Areas. Remote Sens. 2020, 12, 3205. [Google Scholar] [CrossRef]
- Fan, K.G.; Huang, W.G.; He, M.X.; Fu, B.; Zhang, B.; Chen, X.Y. Depth inversion in coastal water based on SAR image of waves. Chin. J. Oceanol. Limnol. 2008, 26, 434–439. [Google Scholar] [CrossRef]
- Zhang, F.; Li, J.; Zhang, B.; Shen, Q.; Ye, H.; Wang, S.; Lu, Z. A simple automated dynamic threshold extraction method for the classification of large water bodies from landsat-8 OLI water index images. Int. J. Remote Sens. 2018, 39, 3429–3451. [Google Scholar] [CrossRef]
- Wu, Q.S.; Wang, M.X.; Shen, Q.; Yao, Y.; Li, J.S.; Zhang, F.F.; Zhou, Y.M. Small water body extraction method based on Sentinel-2 satellite multi-spectral remote sensing image. Natl. Remote Sens. Bull. 2022, 26, 781–794. [Google Scholar] [CrossRef]
- Gu, X.; Zeng, Q.; Shen, H.; Chen, E.; Zhao, L.; Yu, F.; Tu, K. Study on water information extraction using domestic GF-3 image. J. Remote Sens. 2019, 23, 555–565. [Google Scholar]
- White, L.; Brisco, B.; Pregitzer, M.; Tedford, B.; Boychuk, L. RADARSAT-2 Beam Mode Selection for Surface Water and Flooded Vegetation Mapping. Can. J. Remote Sens. 2014, 40, 135–151. [Google Scholar] [CrossRef]
- Yan, Q.; Liao, J.J.; Shen, G.Z. Remote sensing analysis and simulation of change of Ulan Ul Lake in the past 40 years. Remote Sens. Land Resour. 2014, 26, 152–157. [Google Scholar]
- Ji, L.; Zhang, L.; Wylie, B. Analysis of Dynamic Thresholds for the Normalized Difference Water Index. Photogramm. Eng. Remote Sens. 2009, 75, 1307–1317. [Google Scholar] [CrossRef]
- Qunzhu, Z.; Meisheng, C.; Wenkun, S. Study on the spectral characteristics of the snow layer moisture content in the snowmelt period on the northern slope of Tianshan Mountains. Spectrosc Spect. Anal. 2013, 33, 2177–2181. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Site | Acquisition Date | Interference | |
|---|---|---|---|
| Sentinel-1 | Sentinel-2 | ||
| Dongming section of the Yellow River in Shandong | 27 July 2021 | 26 July 2021 | Cloud |
| Junshan Lake | 9 June 2021 | 5 June 2021 | Small waterbody, Cloud |
| Yangzhou, Jiangsu | 1 August 2021 | 2 August 2021 | Small waterbody |
| Taihu Lake | 15 August 2019 | 17 August 2019 | Algal blooms, Radar shadow |
| Ulan-Ula Lake | 6 October 2021 | 7 October 2021 | Windy, Smooth terrain |
| Site | Approach | Overall Accuracy | User Accuracy | Producer Accuracy | Kappa Coefficient |
|---|---|---|---|---|---|
| Yangzhou, Jiangsu | NDWI | 0.9670 | 0.9888 | 0.7902 | 0.8596 |
| VV | 0.9513 | 0.9535 | 0.7120 | 0.7878 | |
| 0.9708 | 0.9806 | 0.8231 | 0.8782 | ||
| Junshan Lake | NDWI | 0.9646 | 0.9854 | 0.8227 | 0.8756 |
| VV | 0.9733 | 0.9736 | 0.8810 | 0.9088 | |
| 0.9773 | 0.9781 | 0.8984 | 0.9288 | ||
| Dongming section of the Yellow River in Shandong | NDWI | 0.9743 | 0.8368 | 0.0823 | 0.1457 |
| VV | 0.9920 | 0.9614 | 0.7381 | 0.8311 | |
| SOWI | 0.9929 | 0.9547 | 0.7796 | 0.8547 | |
| Taihu Lake | NDWI | 0.9233 | 0.9919 | 0.8912 | 0.8366 |
| VV | 0.9707 | 0.9680 | 0.9884 | 0.9340 | |
| 0.9874 | 0.9977 | 0.9832 | 0.9721 | ||
| Ulan-Ula Lake | NDWI | 0.9900 | 0.9934 | 0.9746 | 0.9766 |
| VV | 0.7075 | 0.9562 | 0.0727 | 0.0949 | |
| 0.9891 | 0.9939 | 0.9721 | 0.9747 |
| Date | Approach | Overall Accuracy | User Accuracy | Producer Accuracy | Kappa Coefficient |
|---|---|---|---|---|---|
| 7.31 | NDWI | 0.910 | 0.936 | 0.880 | 0.820 |
| VV | 0.78 | 0.759 | 0.820 | 0.56 | |
| SOWI | 0.905 | 0.935 | 0.870 | 0.81 | |
| 8.08 | NDWI | 0.590 | 0.990 | 0.145 | 0.151 |
| VV | 0.820 | 0.794 | 0.843 | 0.642 | |
| SOWI | 0.880 | 0.891 | 0.854 | 0.759 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, B.; Zhang, F.; Lang, F.; Wang, C.; Wang, C.; Wang, S.; Li, J. A Novel Water Index Fusing SAR and Optical Imagery (SOWI). Remote Sens. 2022, 14, 5316. https://doi.org/10.3390/rs14215316
Tian B, Zhang F, Lang F, Wang C, Wang C, Wang S, Li J. A Novel Water Index Fusing SAR and Optical Imagery (SOWI). Remote Sensing. 2022; 14(21):5316. https://doi.org/10.3390/rs14215316
Chicago/Turabian StyleTian, Bin, Fangfang Zhang, Fengkai Lang, Chen Wang, Chao Wang, Shenglei Wang, and Junsheng Li. 2022. "A Novel Water Index Fusing SAR and Optical Imagery (SOWI)" Remote Sensing 14, no. 21: 5316. https://doi.org/10.3390/rs14215316
APA StyleTian, B., Zhang, F., Lang, F., Wang, C., Wang, C., Wang, S., & Li, J. (2022). A Novel Water Index Fusing SAR and Optical Imagery (SOWI). Remote Sensing, 14(21), 5316. https://doi.org/10.3390/rs14215316