

Methods and Algorithms of Subsurface Holographic Sounding
 ,
, 
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. IZMIRAN Works on Holographic Near-Field Radar
2.1. Brief History
2.2. First Estimates, Preliminaey Experiments
3. Methods of Subsurface Radar Holography
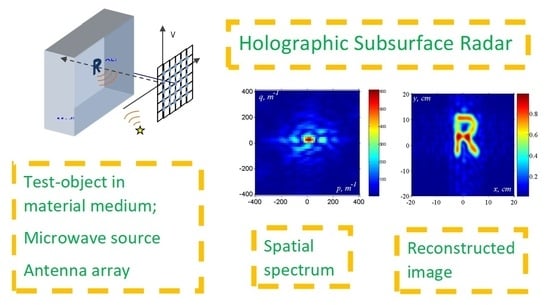
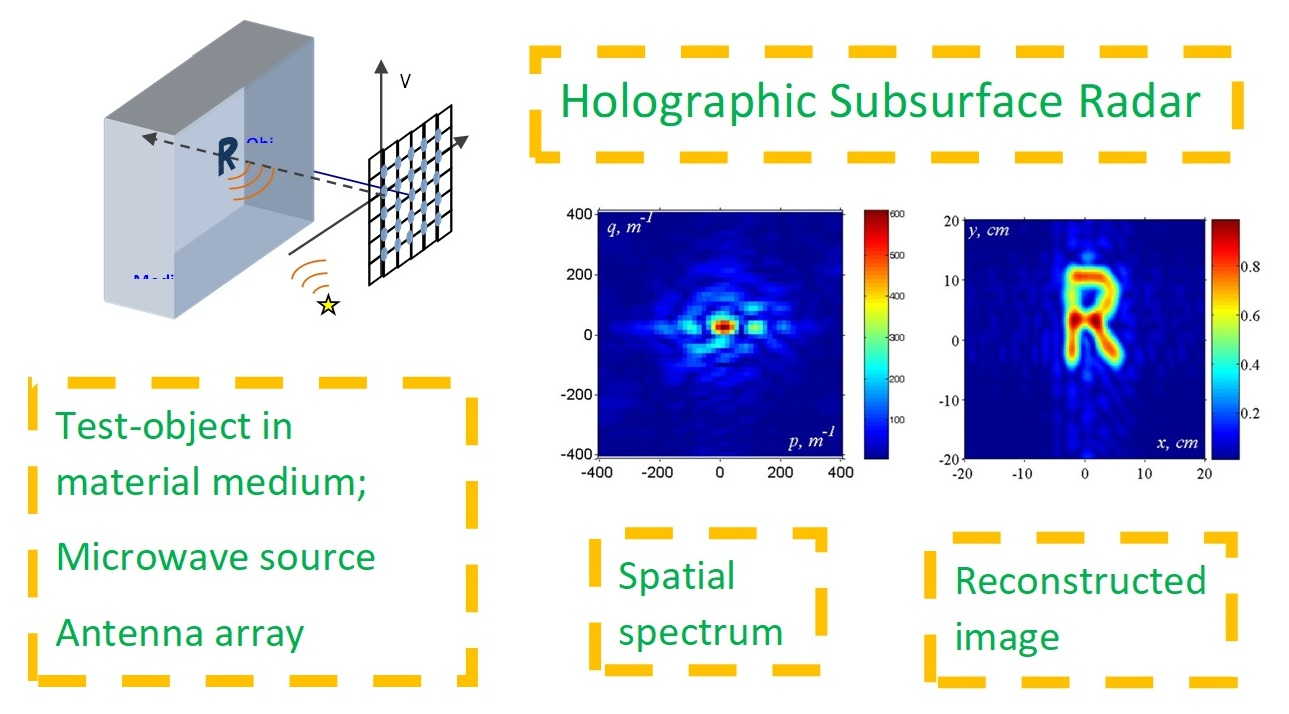
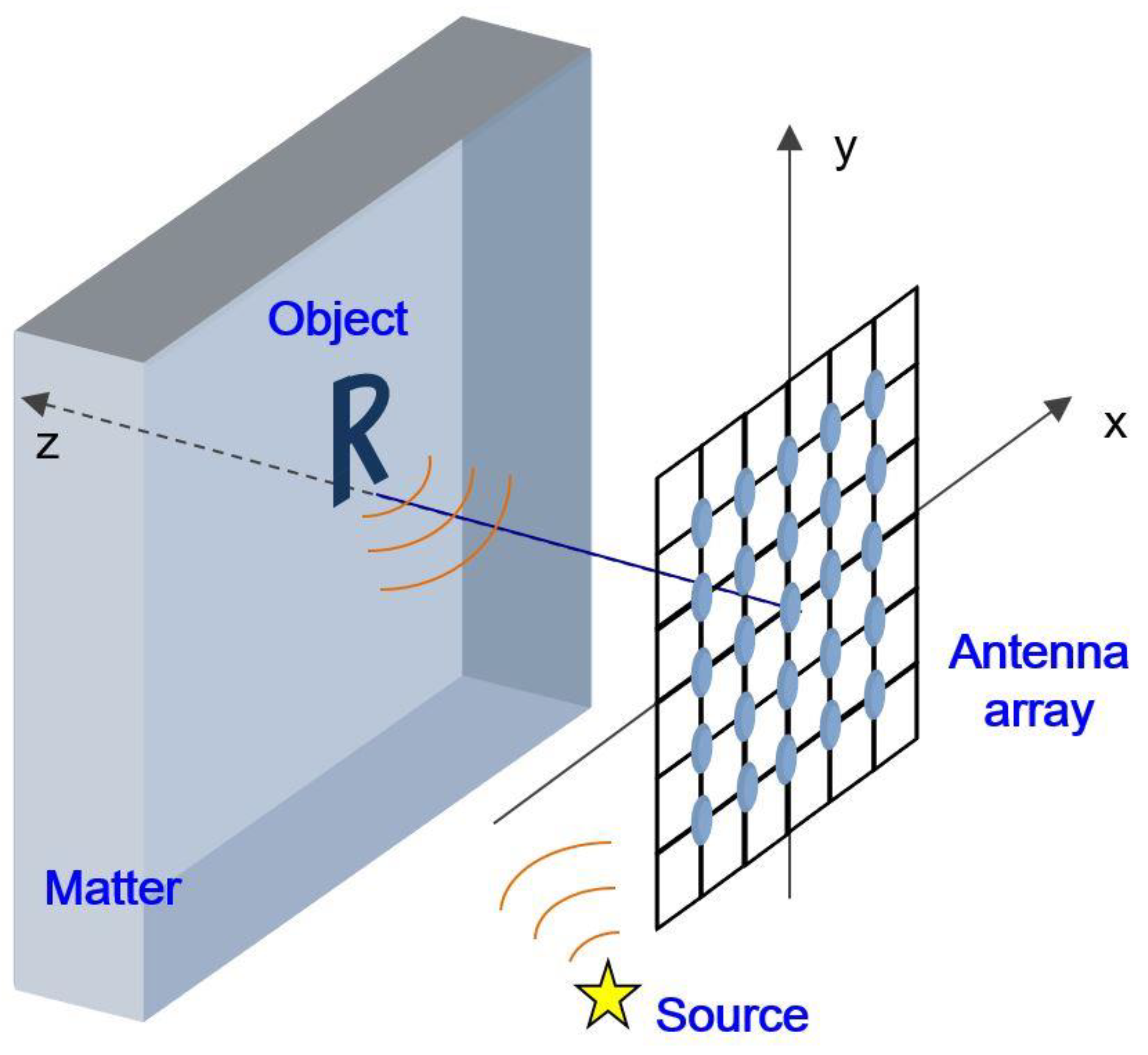
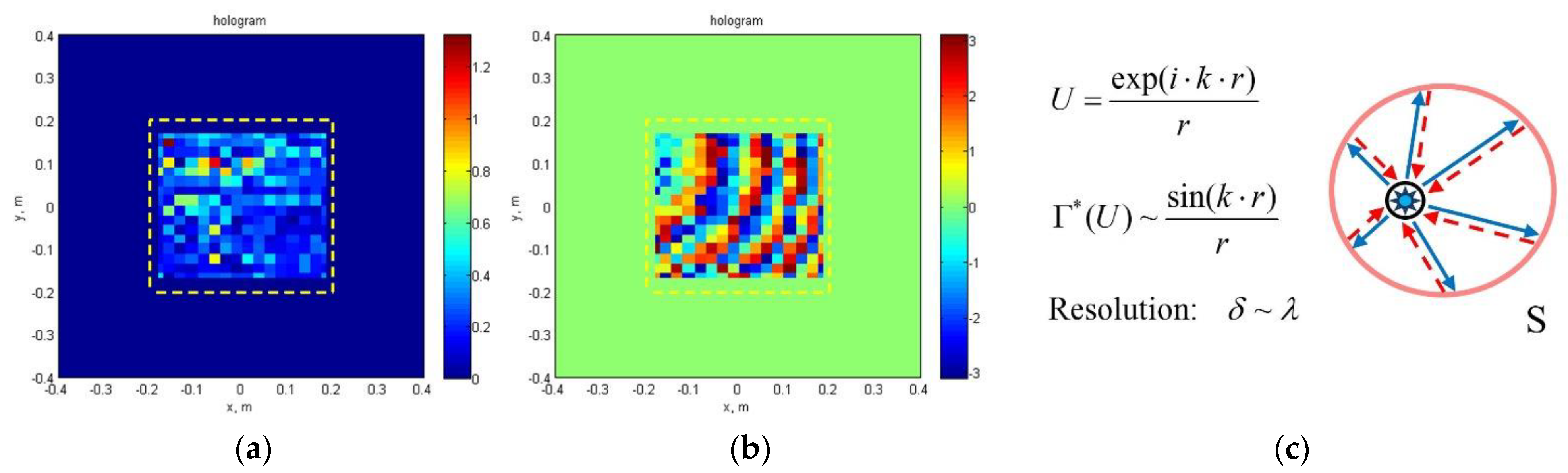
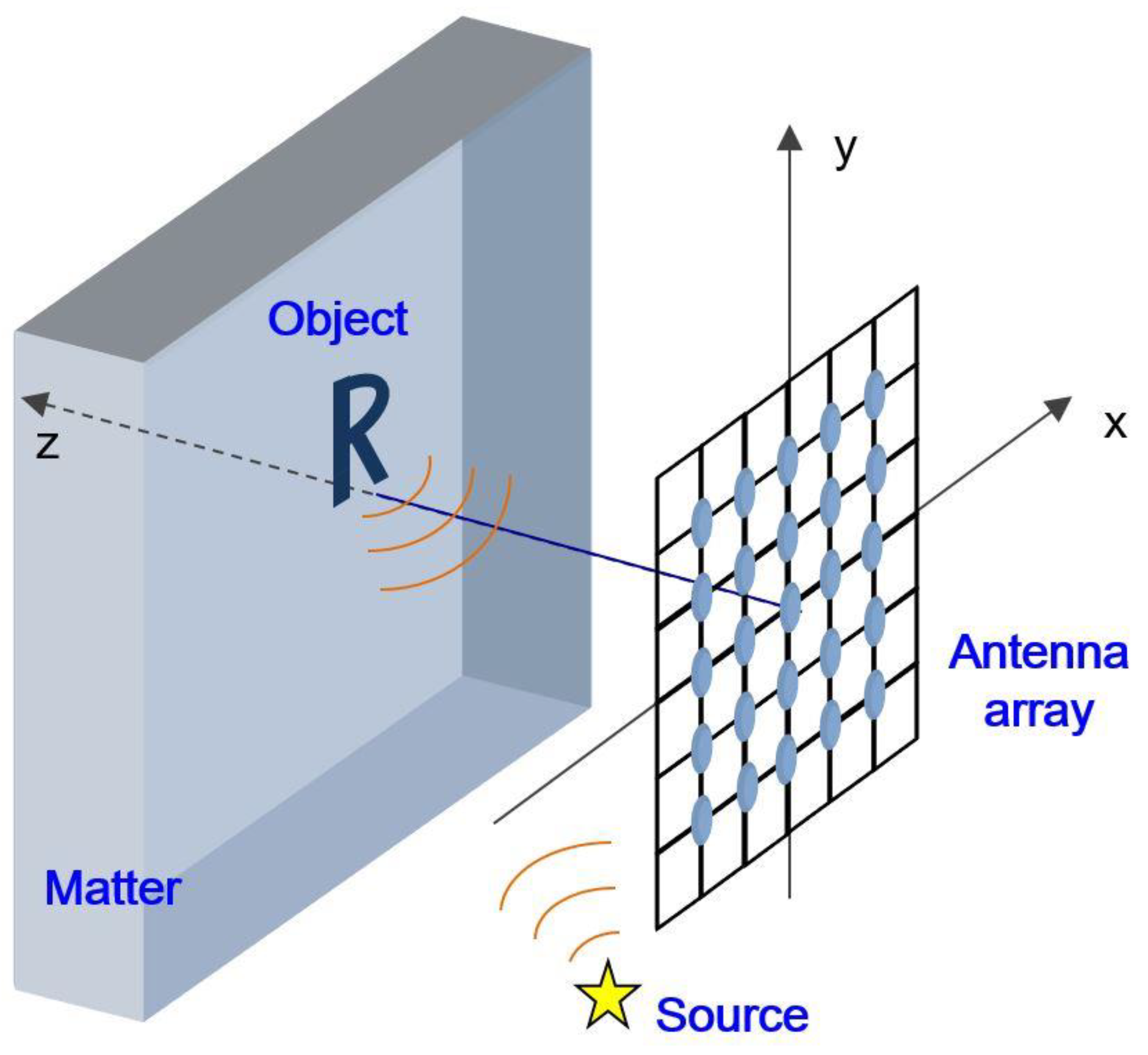
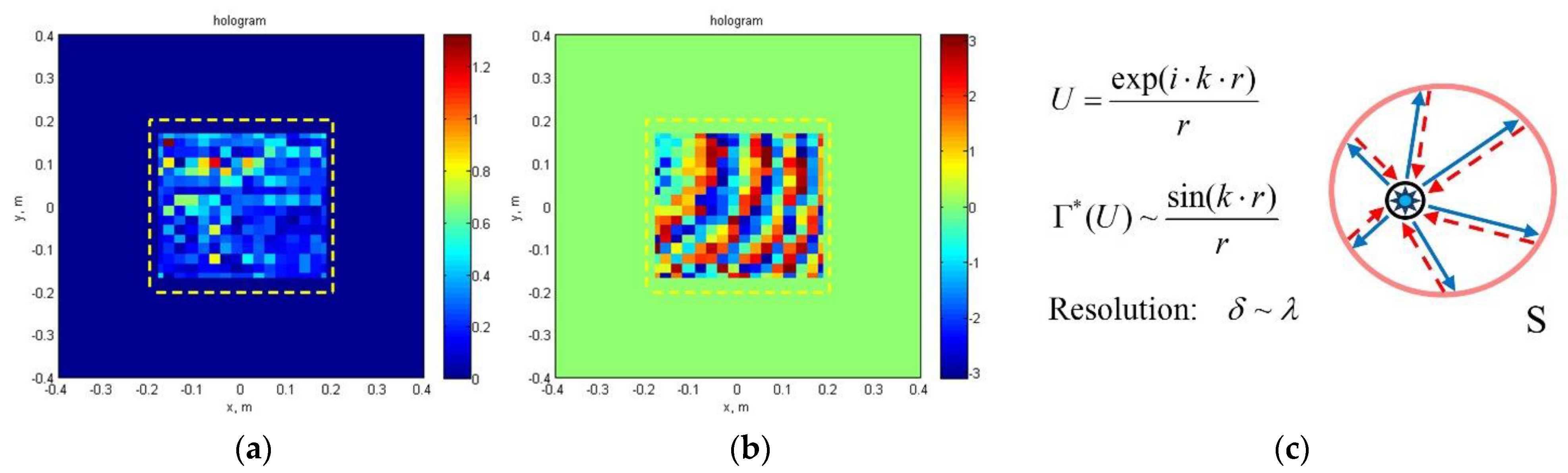
3.1. Physical Theory of Image Formation
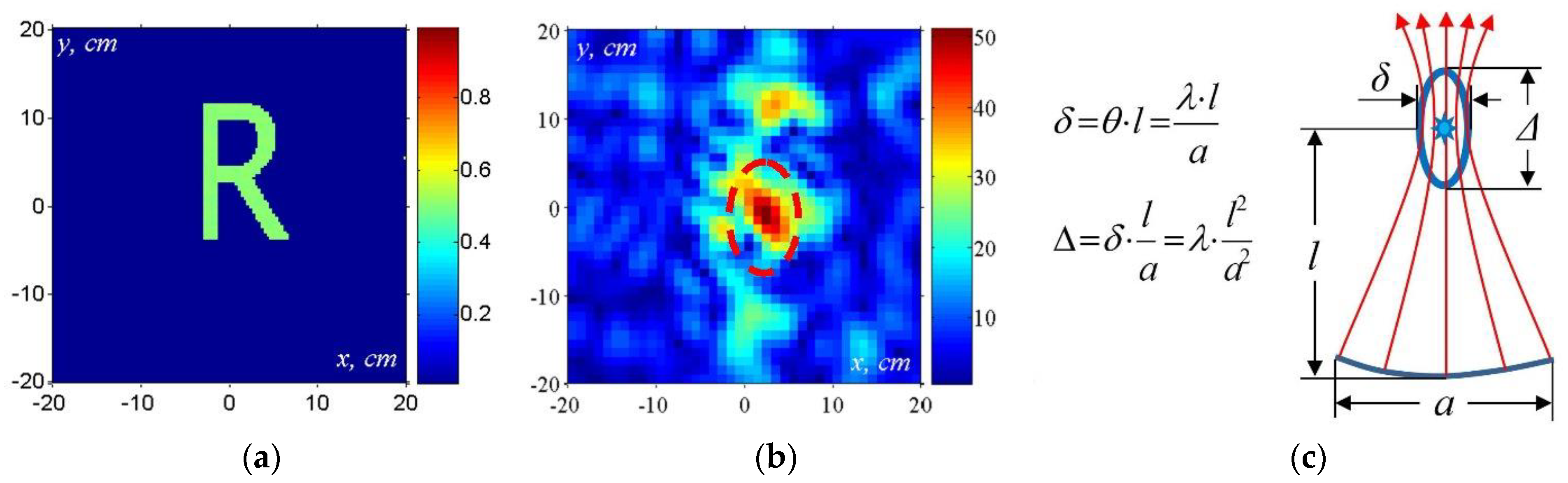
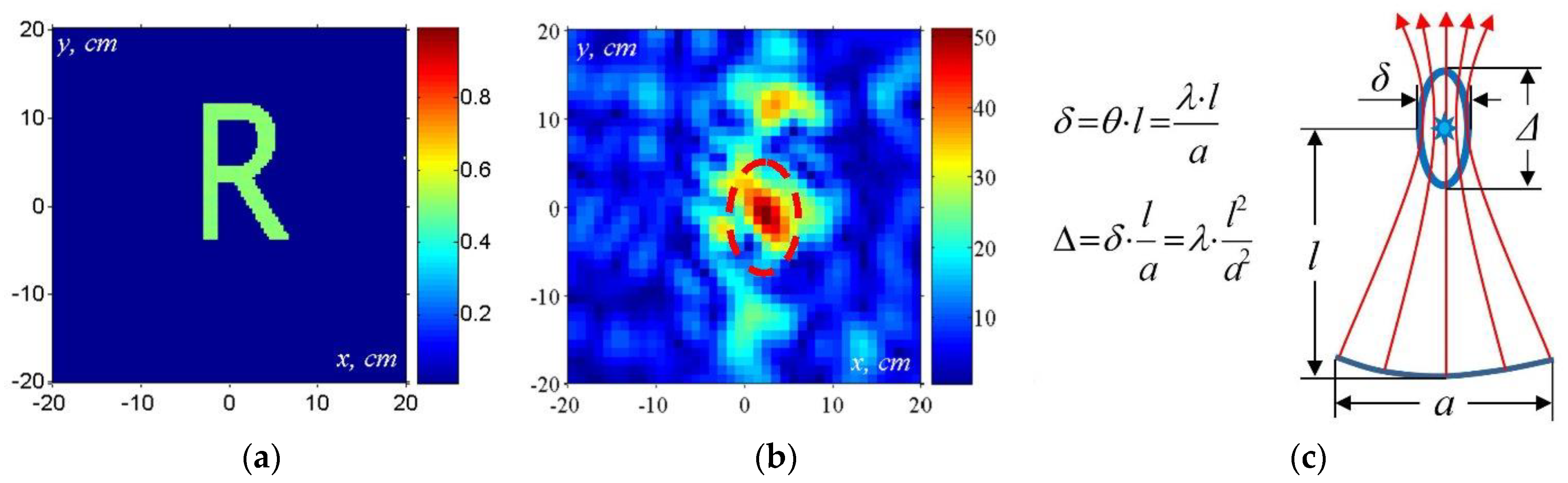
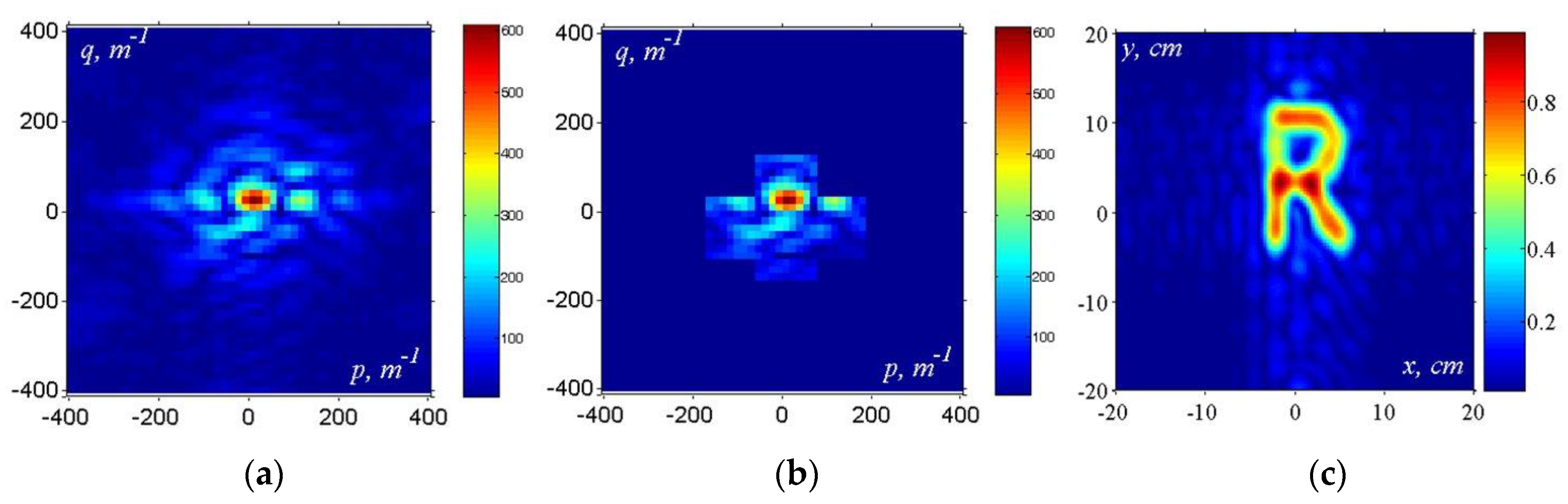
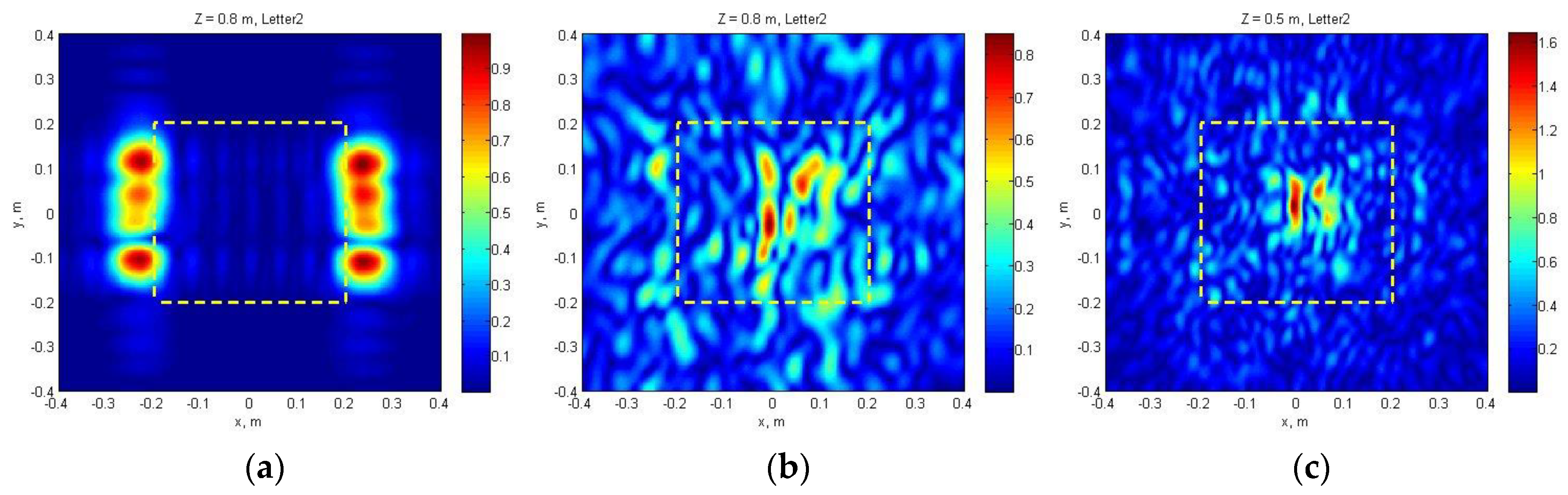
3.2. Visualization of Subsurface Objects
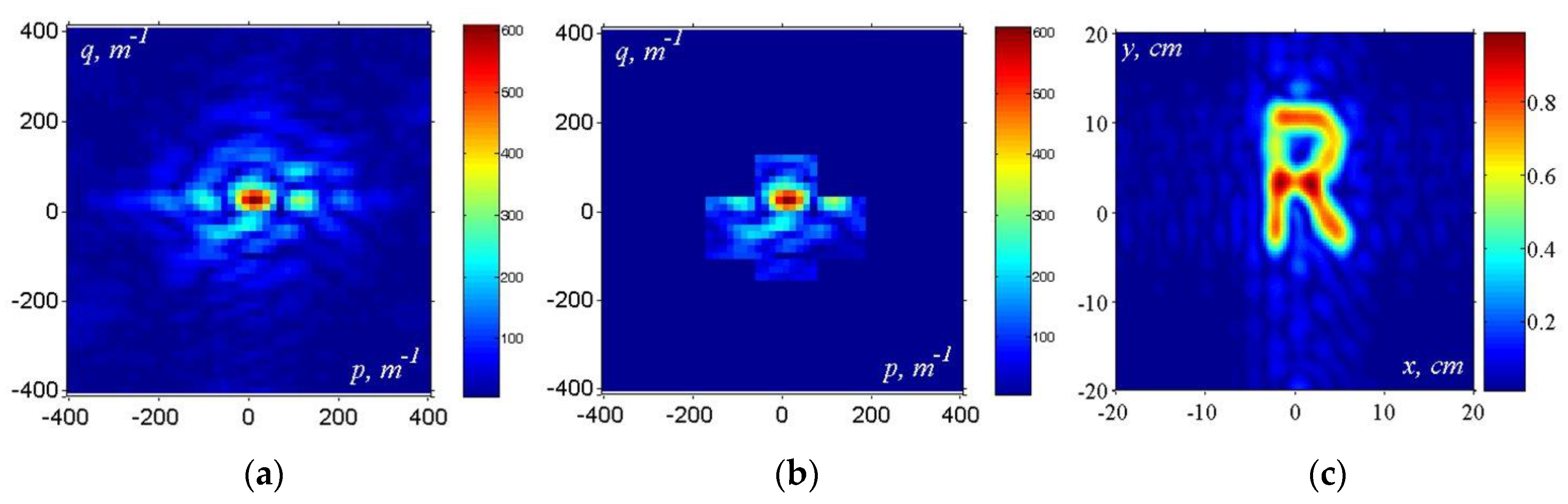
3.3. Reflected Wave Subtraction and Synthetic Aperture Method
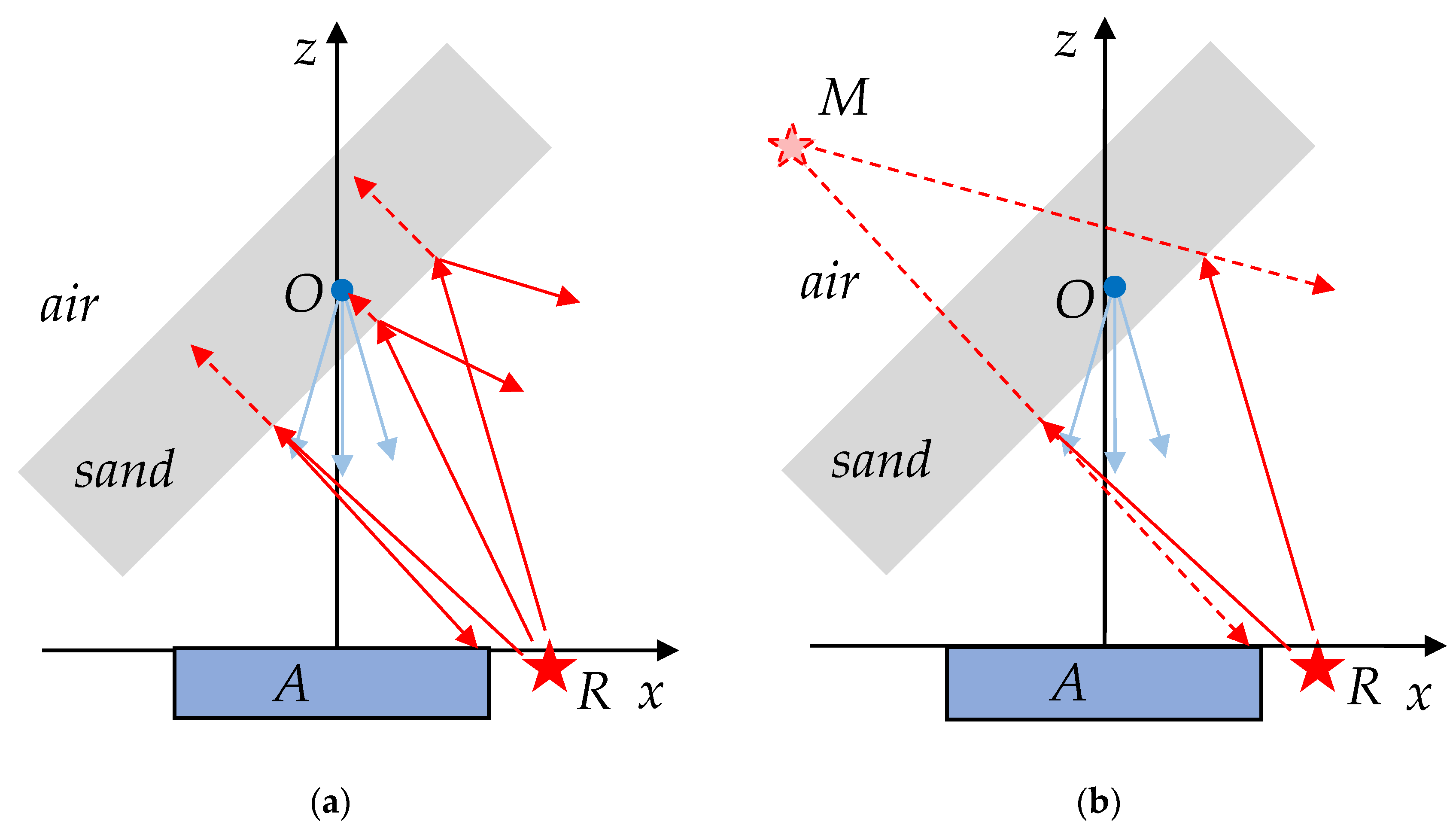
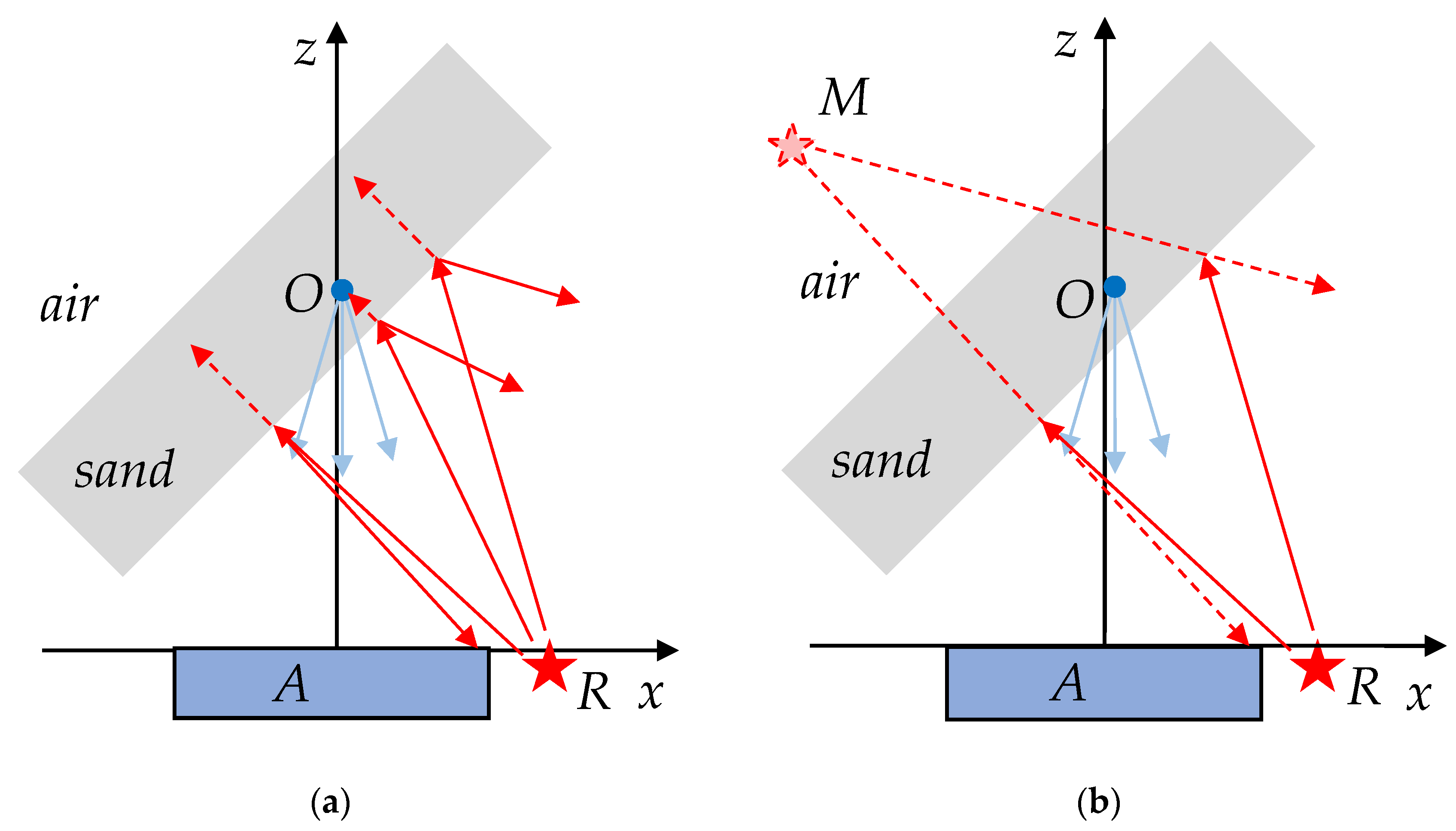
3.4. Oblique Sounding Layout
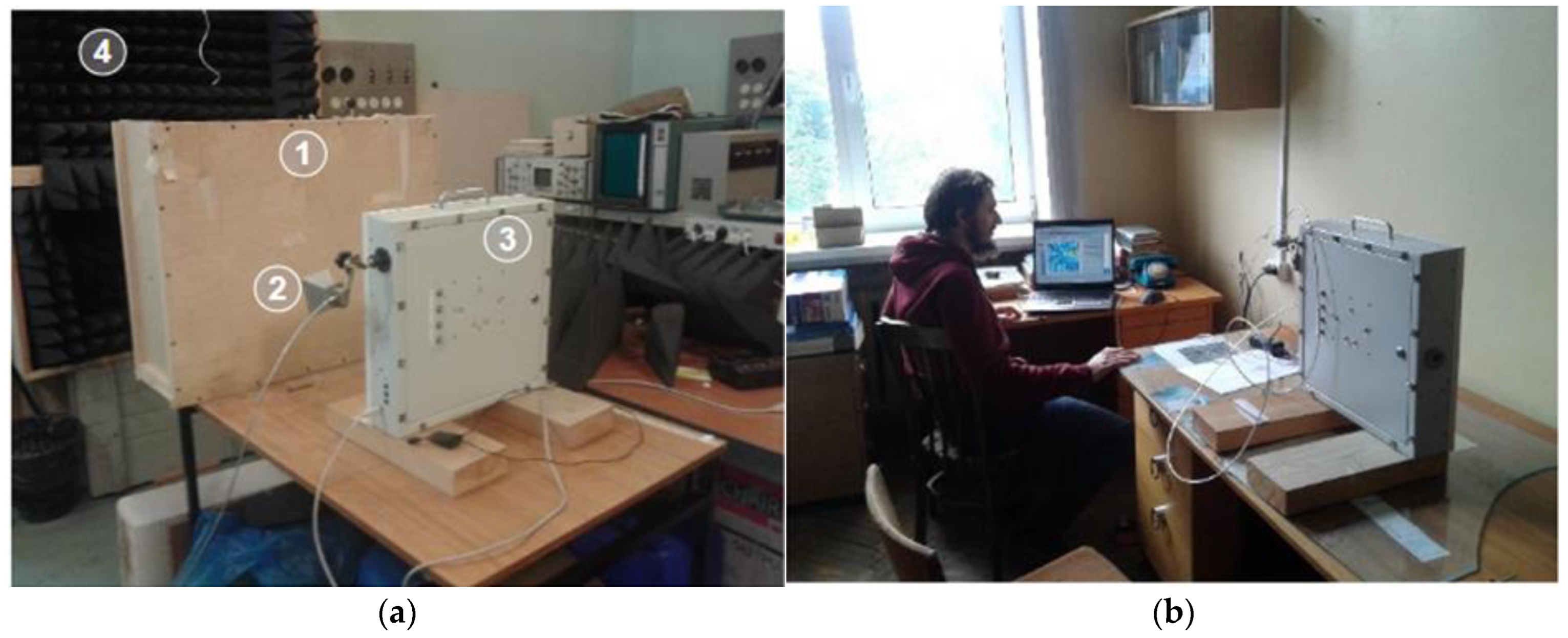
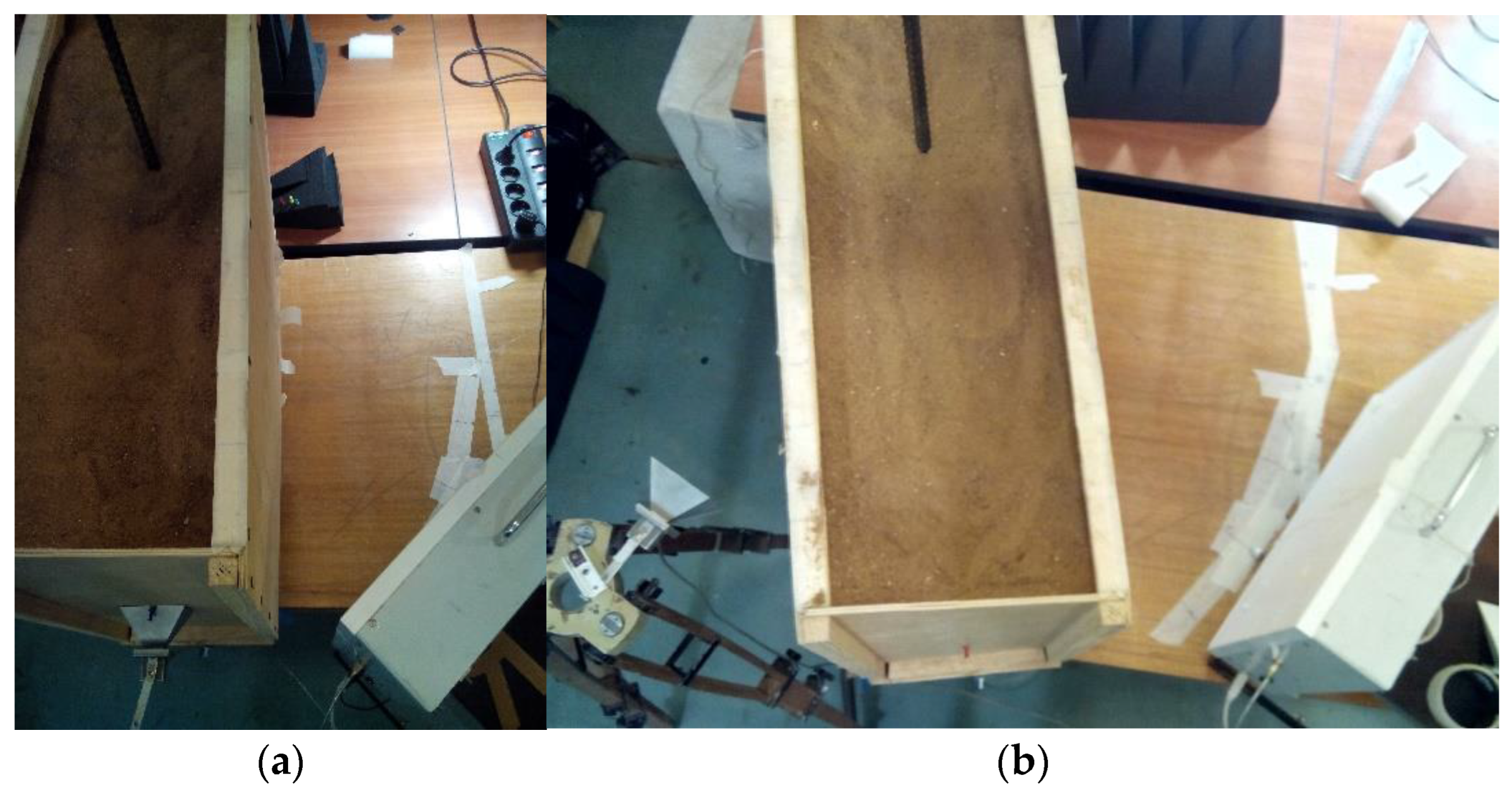
4. Laboratory and Field Tests
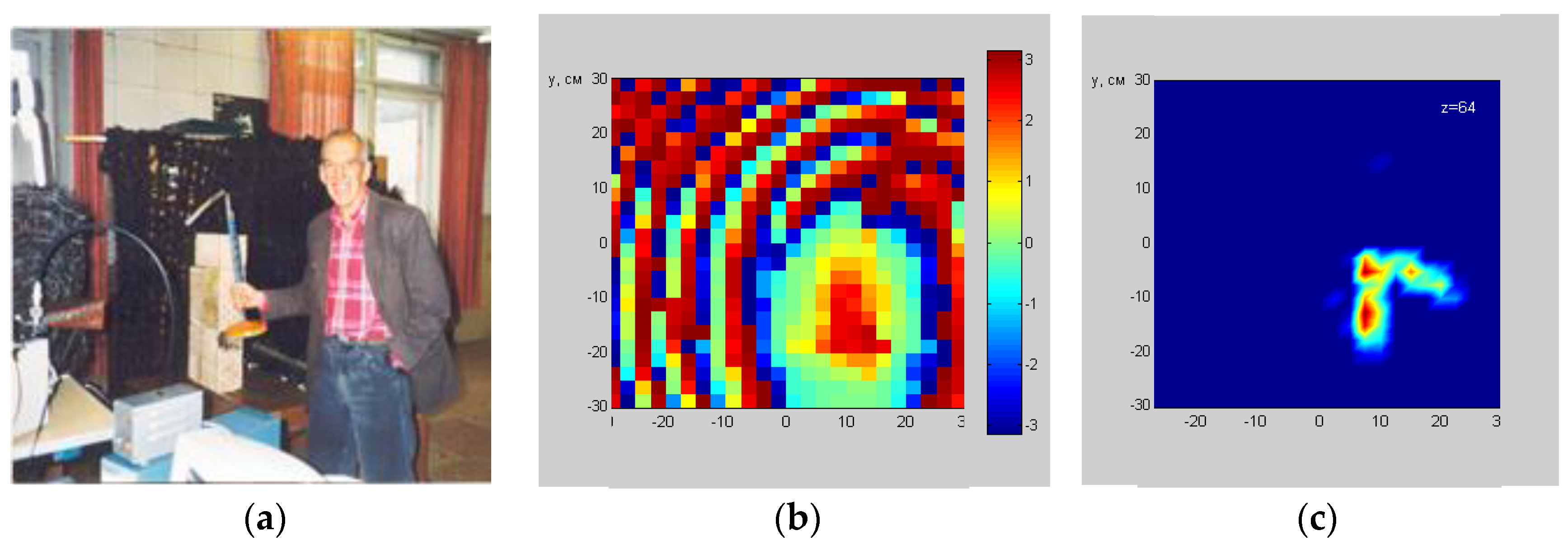
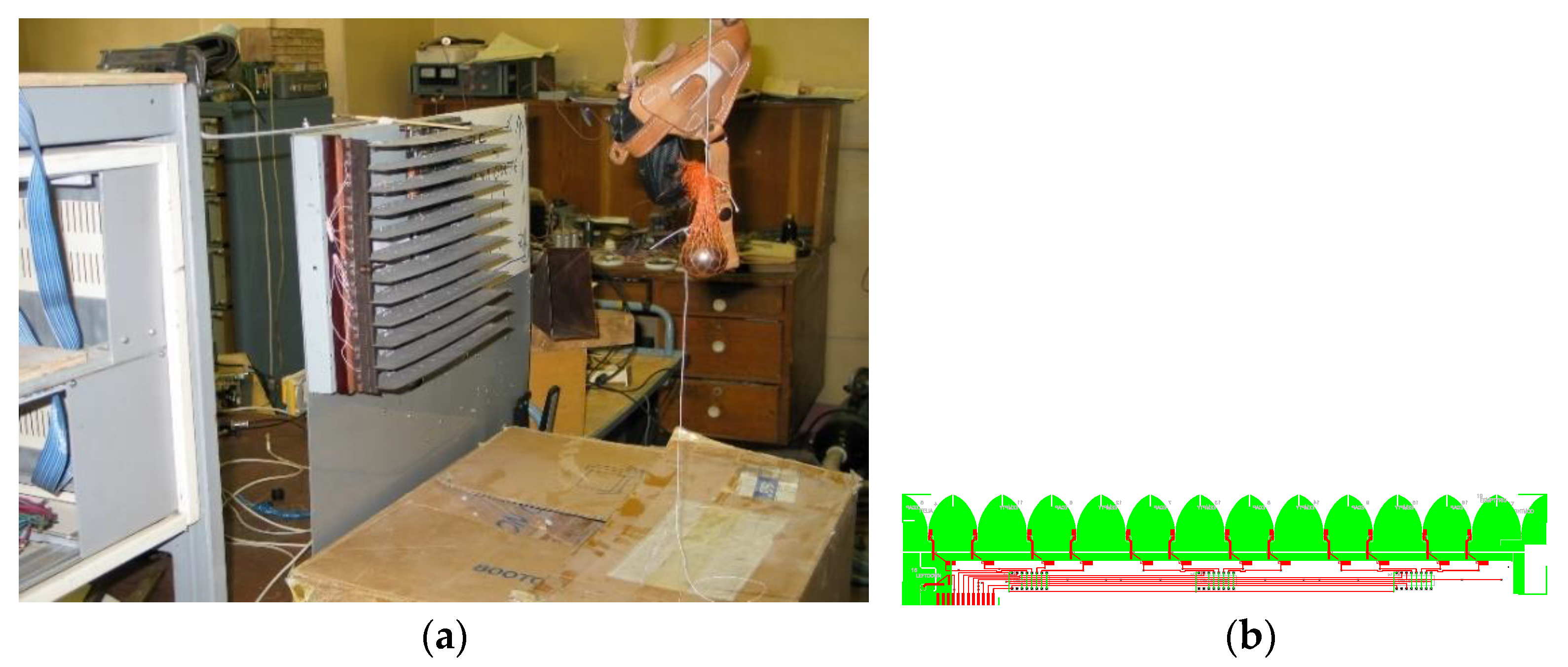
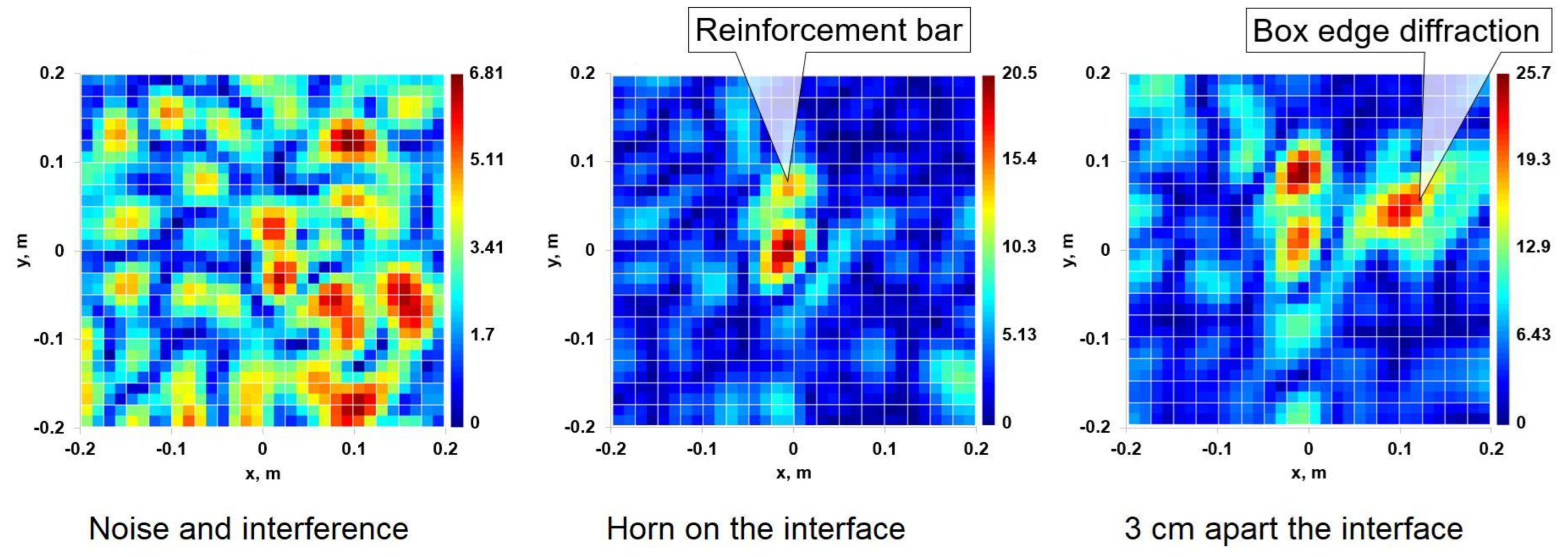
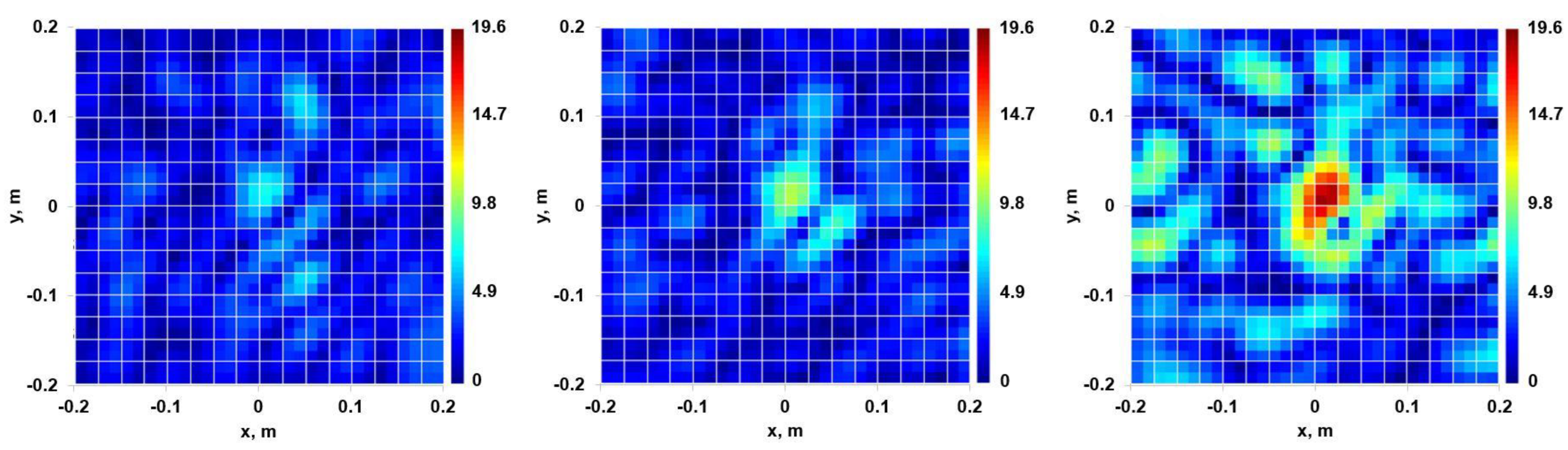
4.1. Object Shape Detection (Laboratory Tests)
4.2. HSR Performance Assessment in Field Conditions
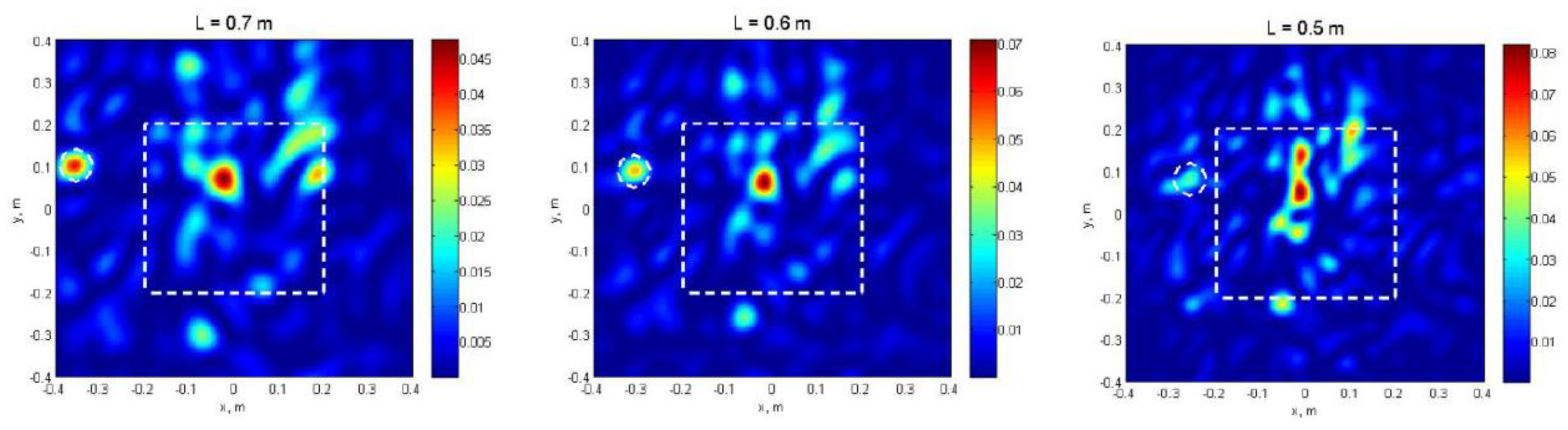
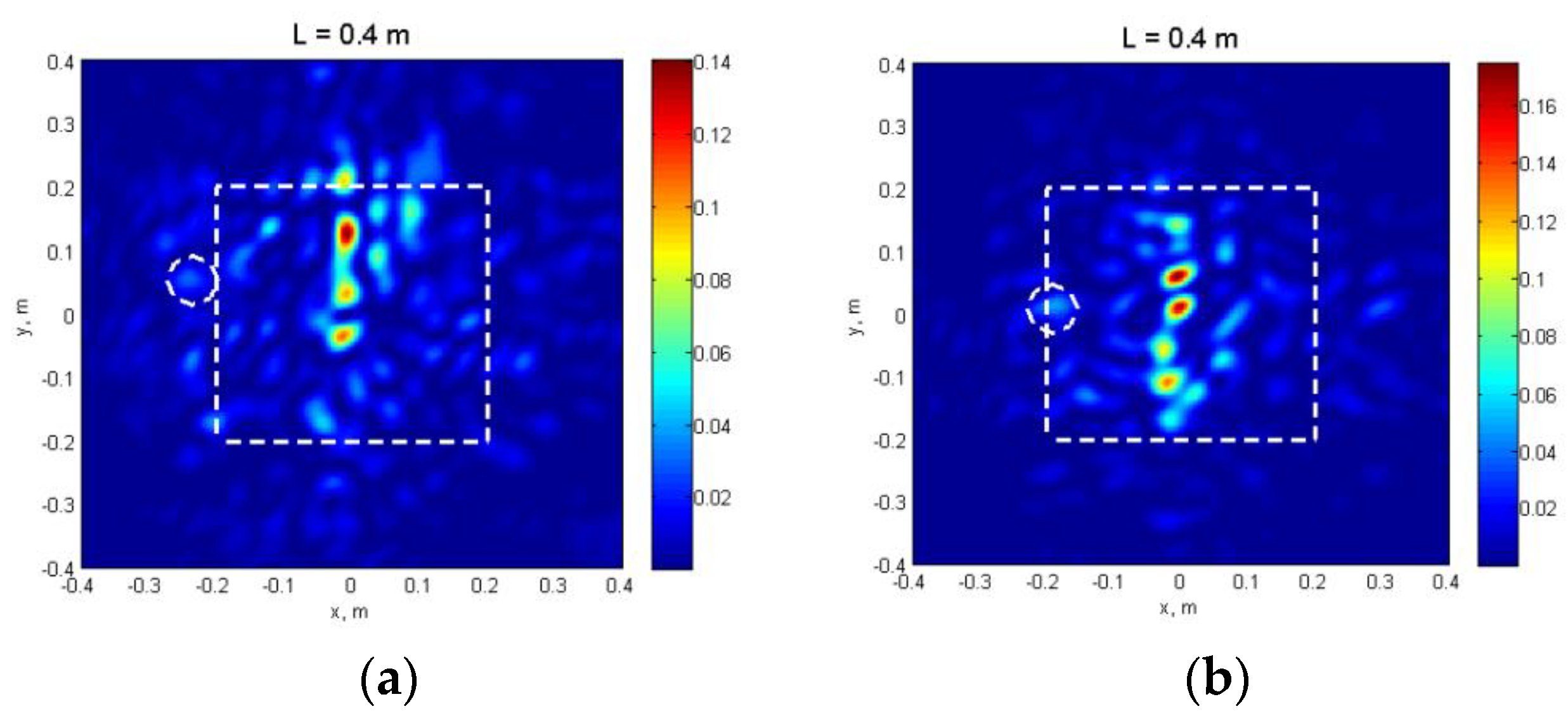
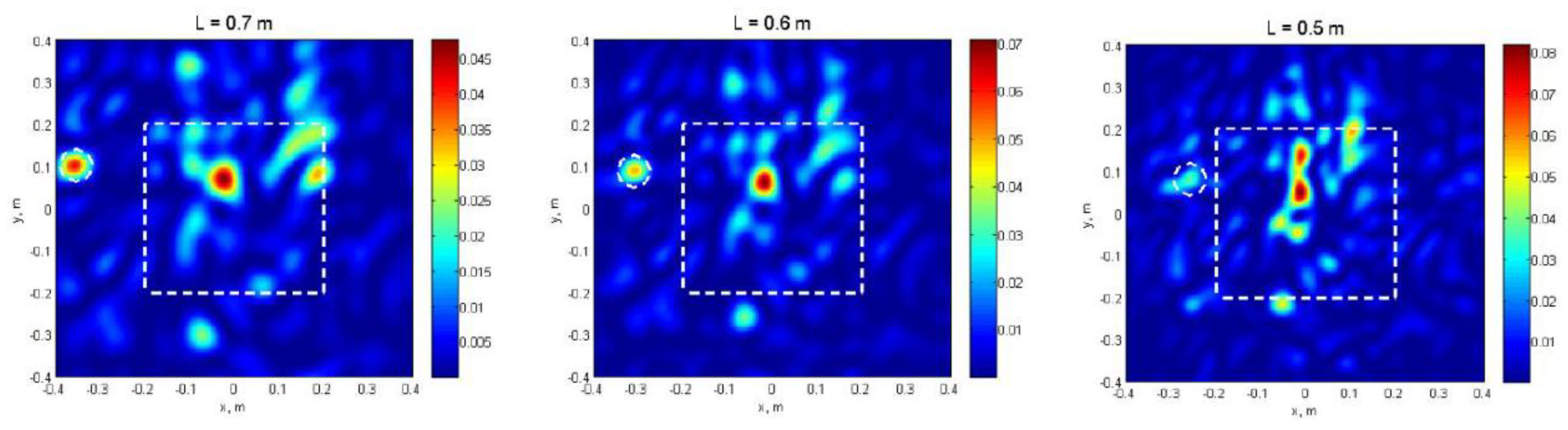
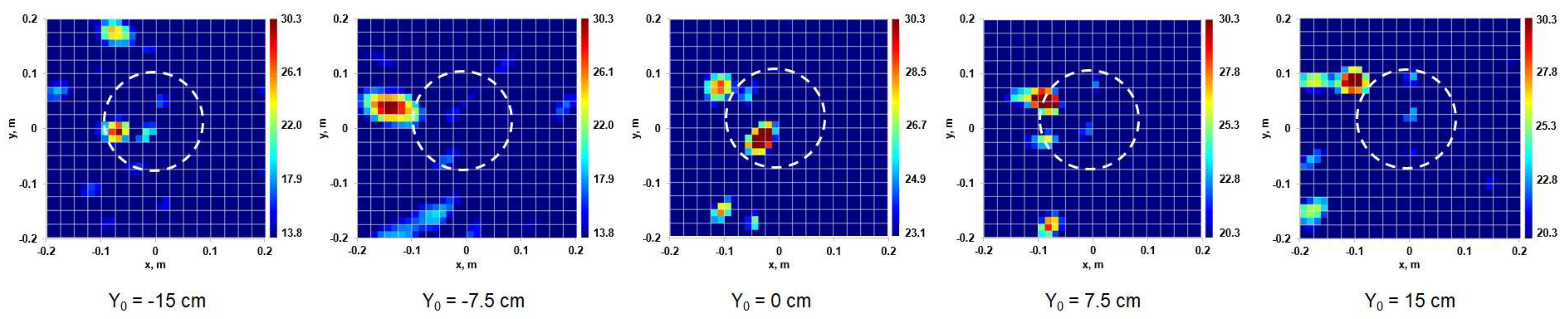
4.3. Results of Oblique Sounding, Field Test
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Born, M.; Wolf, E. Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light, 7th ed.; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Anderson, A.P. Microwave holography. Proc. IEEE 1977, 124, 946–962. [Google Scholar] [CrossRef]
- Tricoles, G.; Farhat, N.H. Microwave holography: Applications and techniques. Proc. IEEE 1977, 65, 108–121. [Google Scholar] [CrossRef]
- Cao, Q.; Goodman, J.W. Wave-front inversion using a thin phase hologram: A computer simulation. Appl. Opt. 1984, 23, 4575–4587. [Google Scholar] [CrossRef] [PubMed]
- Iizuka, K. Microwave hologram by photoengraving. Proc. IEEE 1969, 57, 813–814. [Google Scholar] [CrossRef]
- Adib, F.; Hsu, C.Y.; Mao, H.; Katabi, D.; Durand, F. Capturing the human figure through a wall–Journ. ACM Trans. Graph. 2015, 34, 219. [Google Scholar] [CrossRef]
- Wu, H.; Ravan, M.; Amineh, R.K. Holographic Near-Field Microwave Imaging With Antenna Arrays in a Cylindrical Setup. IEEE Trans. Microw. Theory Tech. 2021, 69, 418–430. [Google Scholar] [CrossRef]
- Amineh, R.K.; Nikolova, N.K.; Ravan, M. Real-Time Three-Dimensional Imaging of Dielectric Bodies Using Microwave/Millimeter-Wave Holography; IEEE Press: Piscataway, NJ, USA; Wiley: Hoboken, NJ, USA, 2019. [Google Scholar]
- Ivashov, S.I.; Razevig, V.V.; Sergeev, D.L.; Bugaev, A.S.; Zhou, F.; Prokhanova, E.I.; Shcherbakova, A.V.; Dobrynin, S.N.; Vasilenkov, M. An example of microwave holography investigation of an old orthodox Russian icon dated to 19th Century. Heritage 2022, 5, 2804–2817. [Google Scholar] [CrossRef]
- Qin, T.; Bossi, L.; Bartolini, A.; Falorni, P.; Giannelli, P.; Zhao, Y.; Capineri, L. Influence Analysis of Uneven Surface on Landmine Detection Using Holographic Radar. In Proceedings of the Progress in Electromagnetics Research Symposium, Toyama, Japan, 1–4 August 2018; pp. 683–691. [Google Scholar]
- Chen, C.; Su, Y.; He, Z.; Liu, T.; Song, X. Clutter mitigation in holographic subsurface radar imaging using generative adversarial network with attentive subspace projection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5116214. [Google Scholar] [CrossRef]
- Bossi, L.; Falorni, P.; Priori, S.; Olmi, R.; Capineri, L. Numerical Design and Experimental Validation of a Plastic 3D-Printed Waveguide Antenna for Shallow Object Microwave Imaging. Sens. Imaging 2021, 22, 22. [Google Scholar] [CrossRef]
- Nikolova, N.K. Introduction to Microwave Imaging. In EuMA High Frequency Technologies Series; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Ivashov, S.I.; Capineri, L.; Bechtel, T.D.; Razevig, V.V.; Inagaki, M.; Gueorguiev, N.L.; Kizila, A. Design and applications of multi-frequency holographic subsurface radar: Review and case histories. Remote Sens. 2021, 13, 3487. [Google Scholar] [CrossRef]
- Popov, A.V.; Kopeikin, V.V.; Vinogradov, V.A. Holographic subsurface radar: Numerical simulation. In Proceedings of the 8th Internatinal Conference on Ground Penetrating Radar, Gold Coast, Australia, 23–26 May 2000; pp. 288–291. [Google Scholar]
- Kopeikin, V.V.; Popov, A.V.; Reznikov, A.E.; Rinkus, V.V.; Yakuben, L.M.; Annakuliev, S.K.; Vinogradov, V.A.; Zapunidi, S.A. A prototype of holographic subsurface radar: Hardware. Electromagn. Waves Electron. Syst. EWES 2003, 8, 66–70. [Google Scholar]
- Popov, A.V.; Kopeikin, V.V.; Vinogradov, V.A.; Zapunidi, S.A. Reconstruction algorithms and experiments with a prototype of holographic subsurface radar. In Proceedings of the 4th Internatinal Conference on Antenna Theory and Techniques, Sevastopol, Ukraine, 9–12 September 2003; Volume 2, pp. 561–563. [Google Scholar]
- Popov, A.; Prokopovich, I.; Kopeikin, V.; Edemskii, D. Synthetic aperture approach to microwave holographic image improvement. In Proceedings of the International Conference Days on Diffraction, St. Petersburg, Russia, 26–30 May 2014; pp. 192–197. [Google Scholar]
- Popov, A.; Prokopovich, I.; Edemskii, D. Experimental implementation of microwave subsurface holography. In Proceedings of the 2016 Days on Diffraction (DD), St. Petersburg, Russia, 27 June–1 July 2016; pp. 147–152. [Google Scholar]
- Berkut, A.I.; Edemsky, D.E.; Kopeikin, V.V.; Morozov, P.A.; Prokopovich, I.V.; Popov, A.V. Deep Penetration Subsurface Radar: Hardware, Results, Interpretation, 9th Internat; Workshop IWAGPR: Edinburgh, UK, 2017. [Google Scholar]
- Hönl, H.; Maue, A.W.; Westpfahl, R. Theory of Diffraction; Department of Navy, Naval Intelligence Support Center: Suitland, MD, USA, 1978. [Google Scholar]
- Popov, A.V.; Vinogradov, V.A. Focused Gaussian beams in the problem of holographic imaging. IEEE Trans. Antennas Propag. 2002, 50, 1236–1244. [Google Scholar] [CrossRef]
- Wade, G. Signal Coding and Processing, 2nd ed.; Cambridge University Press: Cambridge, UK, 1994; Volume 1. [Google Scholar]
- Whittaker, E.; Watson, G. A Course of Modern Analysis; Cambridge University Press: Cambridge, UK, 1996; Volume 1. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popov, A.V.; Reznikov, A.E.; Berkut, A.I.; Edemsky, D.E.; Morozov, P.A.; Prokopovich, I.V. Methods and Algorithms of Subsurface Holographic Sounding. Remote Sens. 2022, 14, 5274. https://doi.org/10.3390/rs14205274
Popov AV, Reznikov AE, Berkut AI, Edemsky DE, Morozov PA, Prokopovich IV. Methods and Algorithms of Subsurface Holographic Sounding. Remote Sensing. 2022; 14(20):5274. https://doi.org/10.3390/rs14205274
Chicago/Turabian StylePopov, A. V., A. E. Reznikov, A. I. Berkut, D. E. Edemsky, P. A. Morozov, and I. V. Prokopovich. 2022. "Methods and Algorithms of Subsurface Holographic Sounding" Remote Sensing 14, no. 20: 5274. https://doi.org/10.3390/rs14205274
APA StylePopov, A. V., Reznikov, A. E., Berkut, A. I., Edemsky, D. E., Morozov, P. A., & Prokopovich, I. V. (2022). Methods and Algorithms of Subsurface Holographic Sounding. Remote Sensing, 14(20), 5274. https://doi.org/10.3390/rs14205274