
Sparse SAR Imaging Method for Ground Moving Target via GMTSI-Net


Abstract
:
1. Introduction
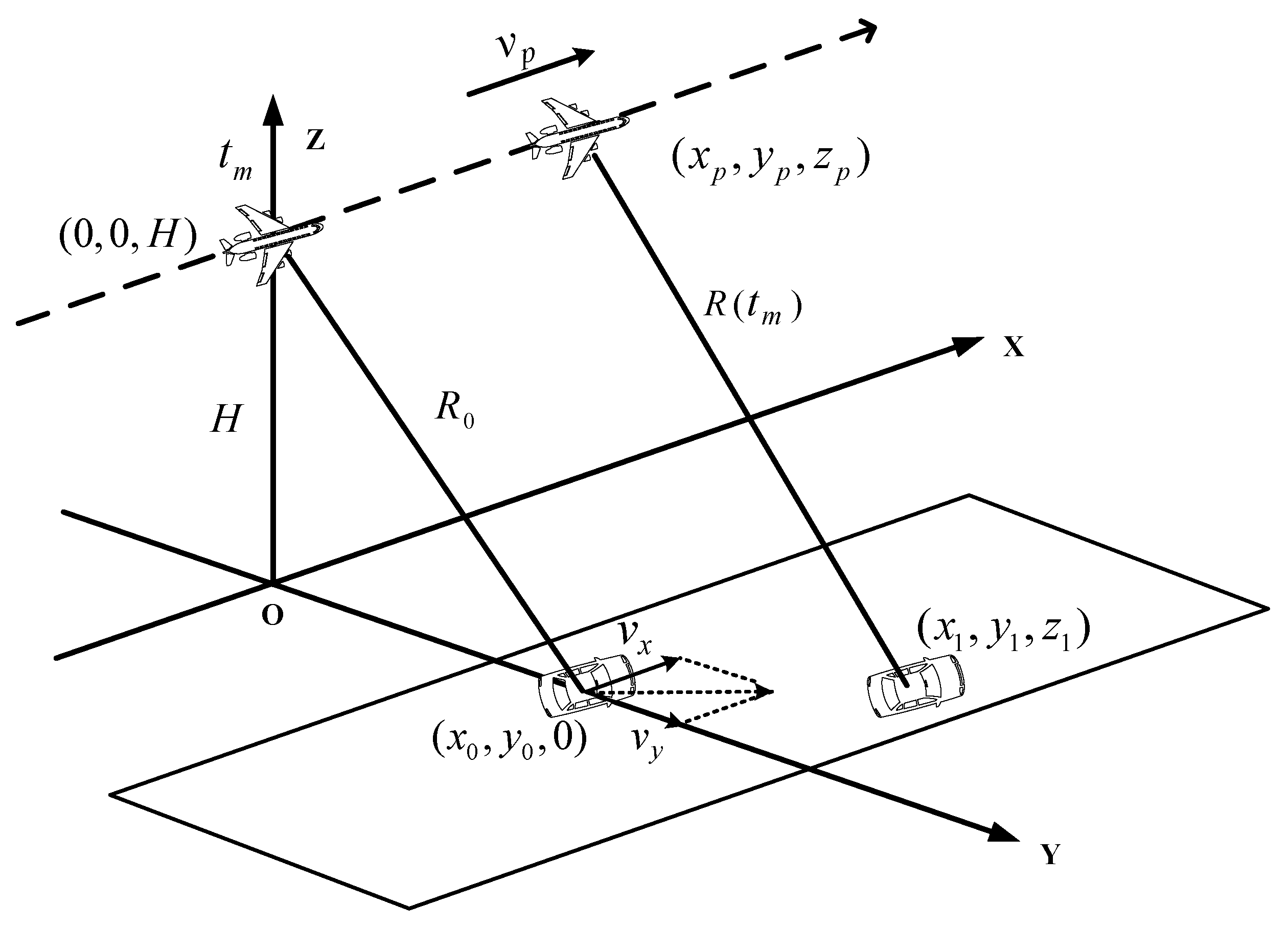
2. Imaging Model and Algorithm of SAR-GMT
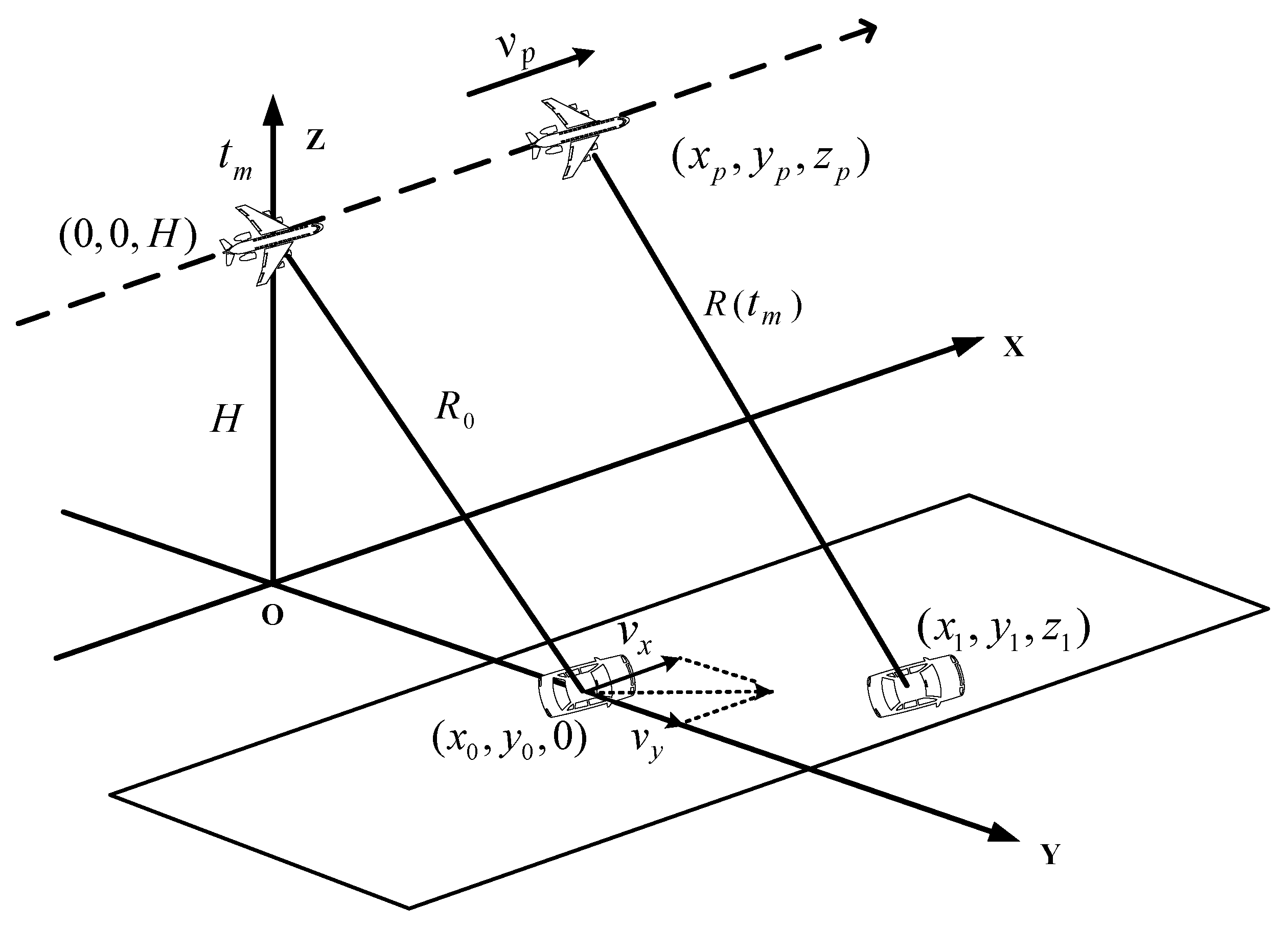
2.1. SAR-GMT Echo Signal Model
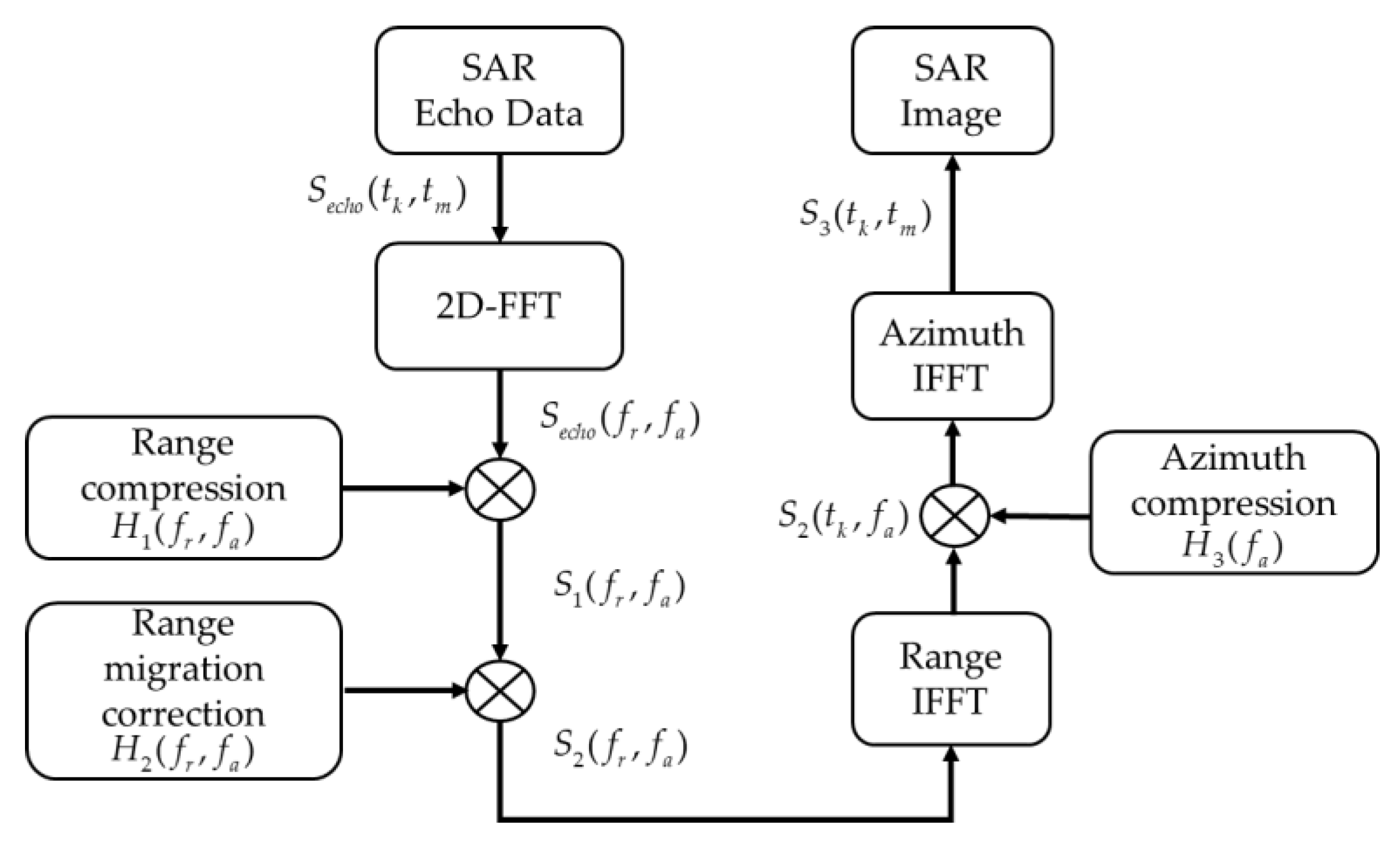
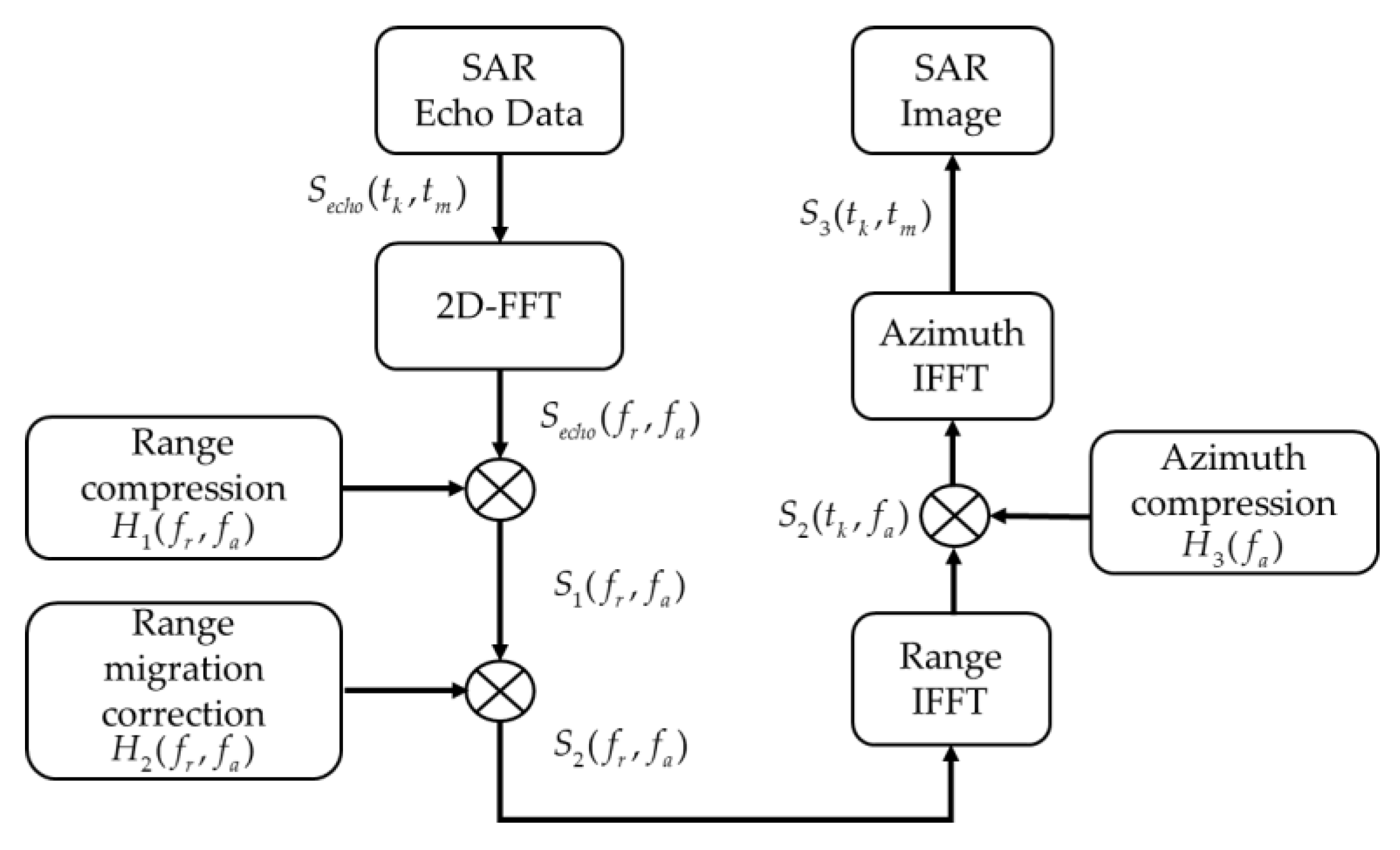
2.2. Traditional SAR-GMT Imaging Method
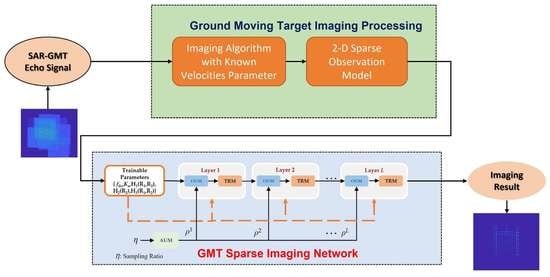
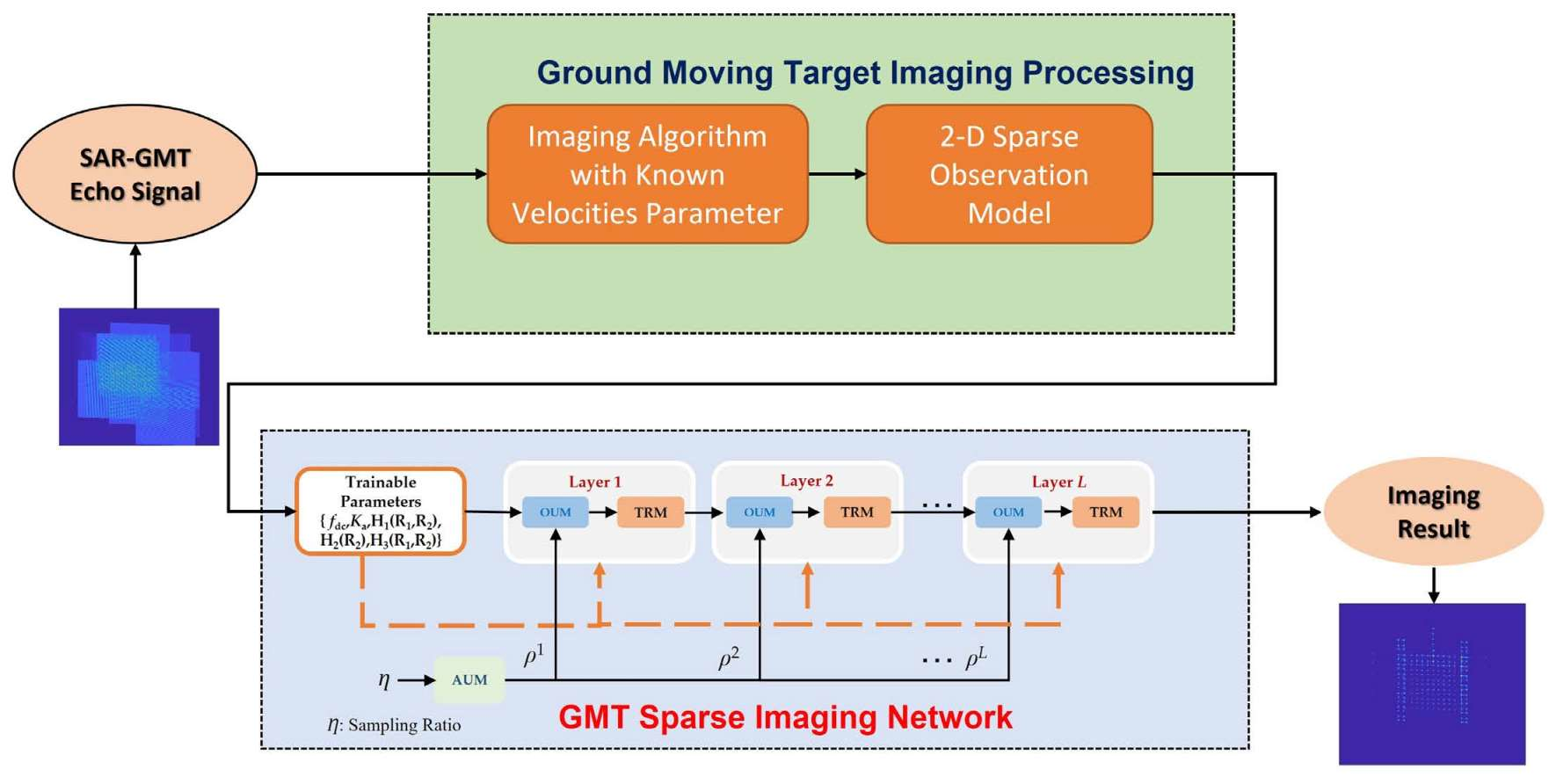
3. Approximate Observation Model and GMTSI-Net for Ground Moving Target
3.1. 2-D Sparse Observation Model Based on Matched Filter Operators
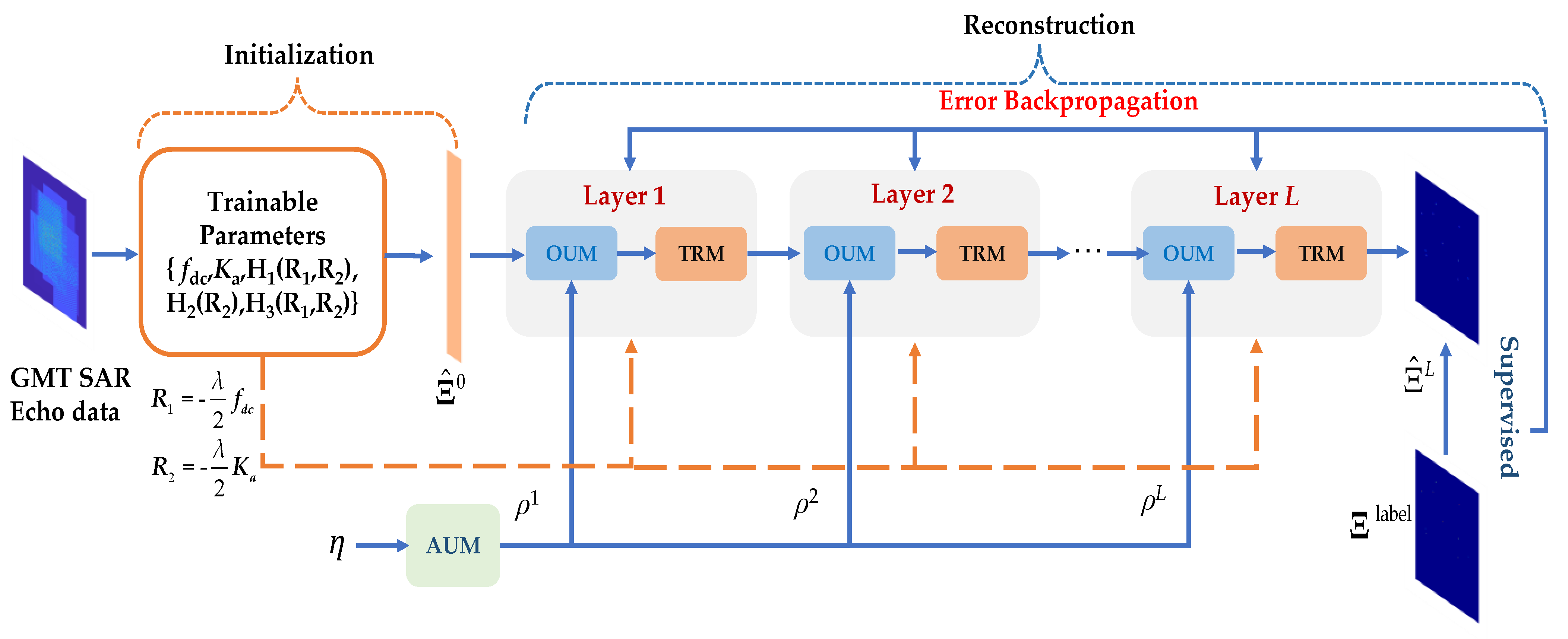
3.2. Sparse Imaging Network for Ground Moving Target (GMTSI-Net)
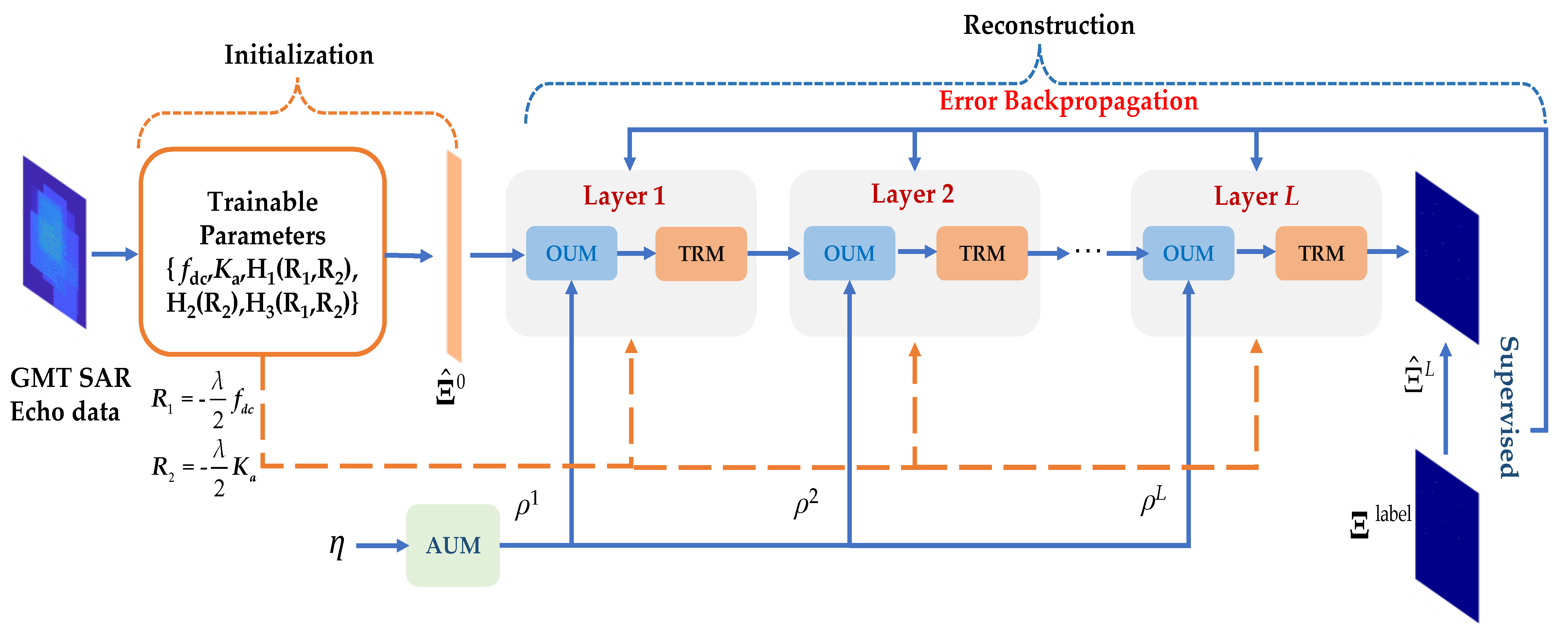
3.2.1. Network Structure
3.2.2. Training Strategy
Loss Function
Backpropagation and Gradient Update
| Algorithm 1 Training of GMTSI-Net |
| Input: Downsampling SAR-GMT echo ; sampling ratio and matrix ; number of layers L; imaging labels ; learnable parameter set ; tuning parameters |
| Output: GMT imaging result |
| 1: Initialize |
| 2: for i ≤ L do |
| 3: Update the operator Oi via OUM |
| 4: Estimate the result of GMT imaging , and calculate the Loss(ϒ) |
| 5: if Loss(ϒ) < ε |
| 6: output the result |
| 7: else |
| 8: Update the parameters ϒi + 1 by Equation (27) and Adam optimizer |
| 9: i = i + 1 |
| 10: end for |
4. Experimental Results and Analysis
4.1. Point Target Simulation Experiment
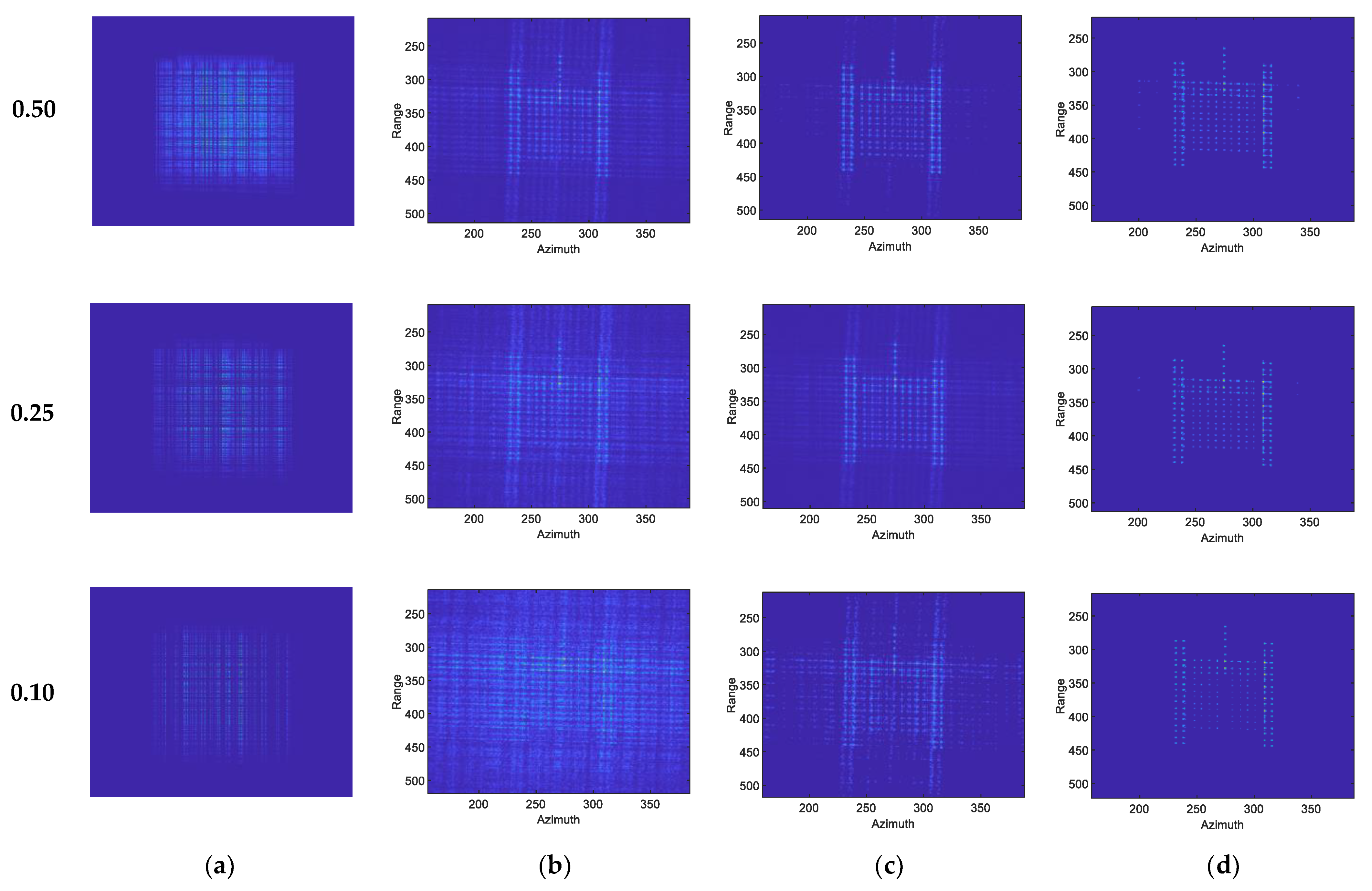
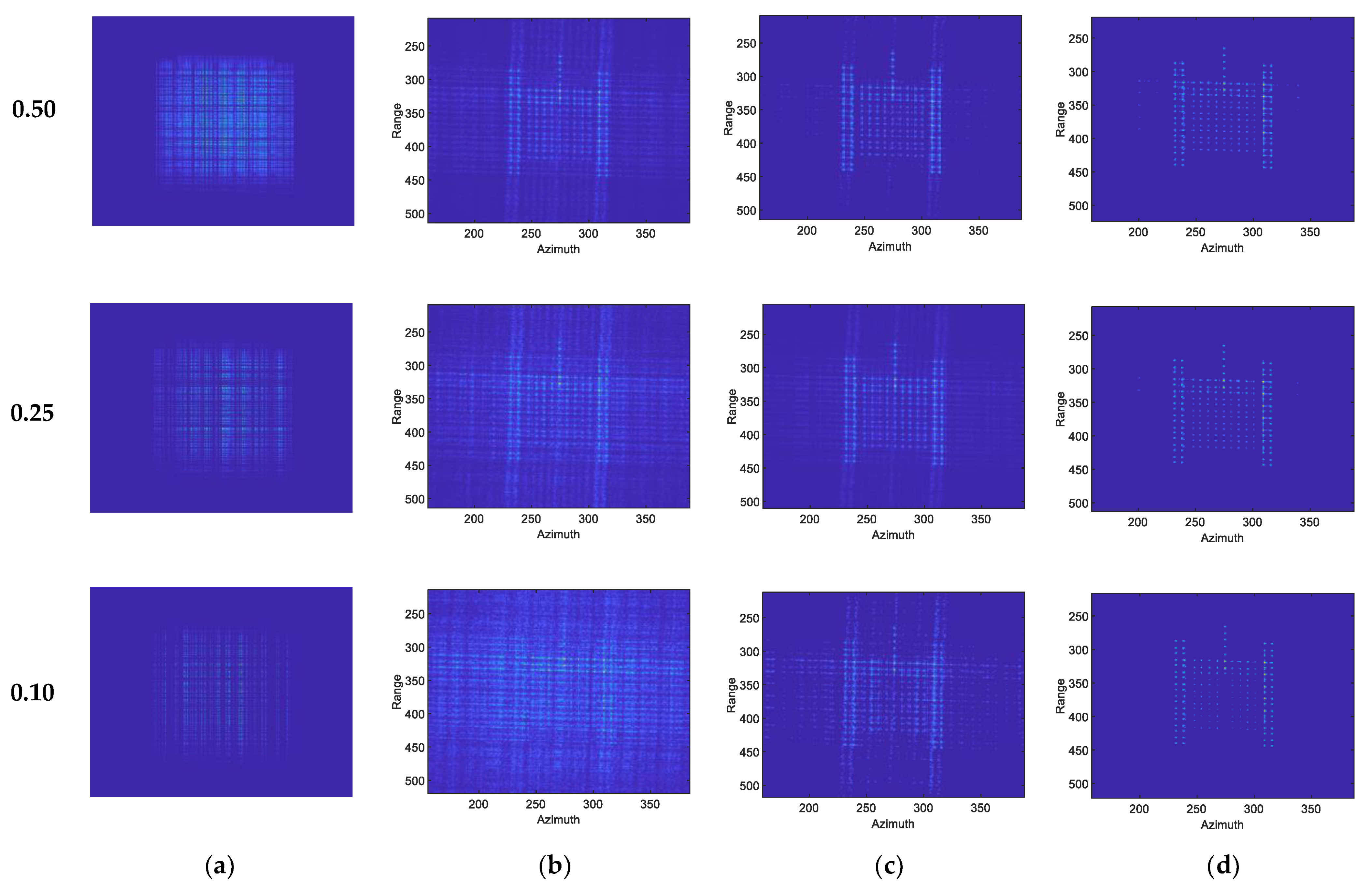
4.1.1. Comparison of Different Sampling Ratios
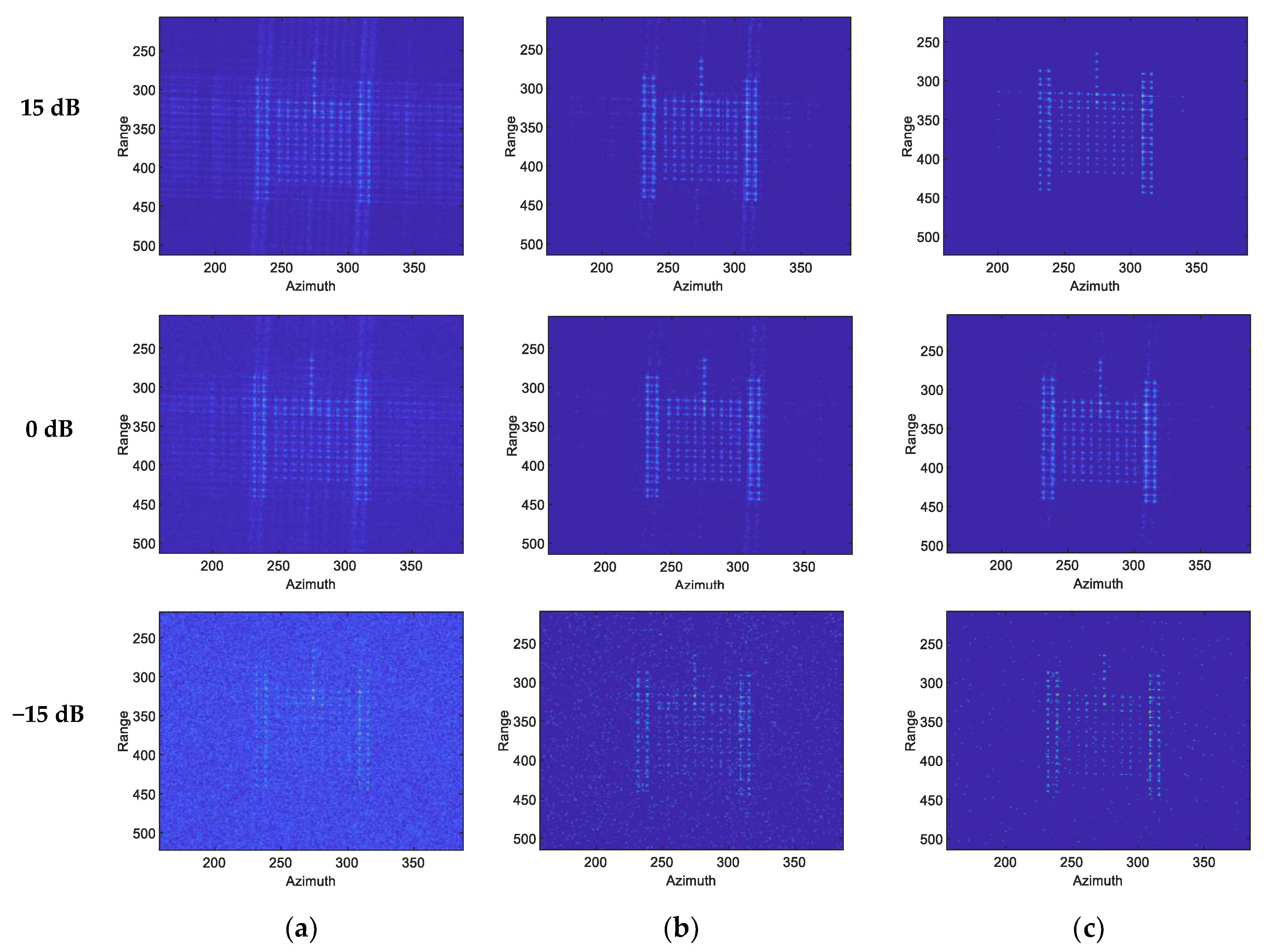
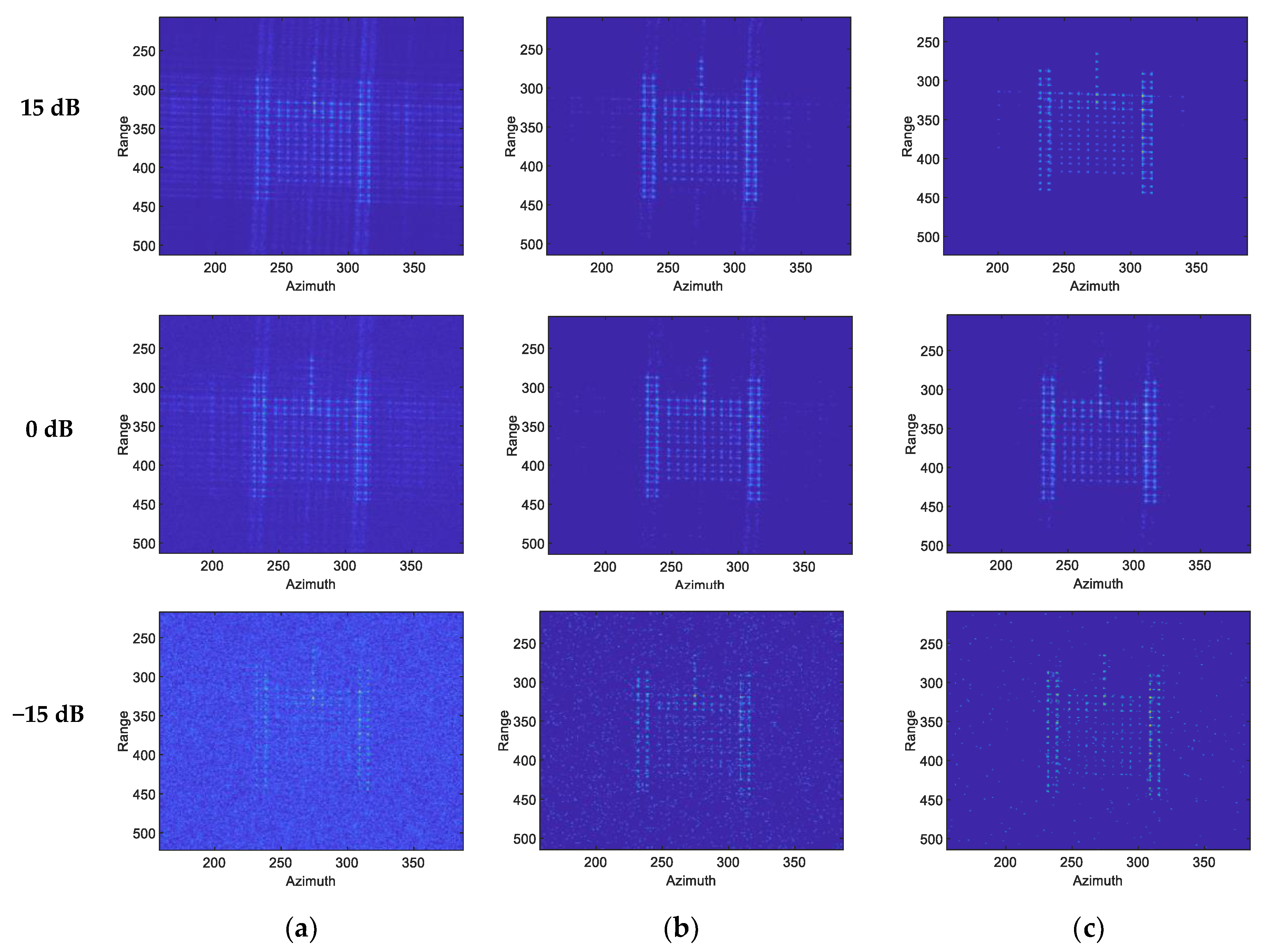
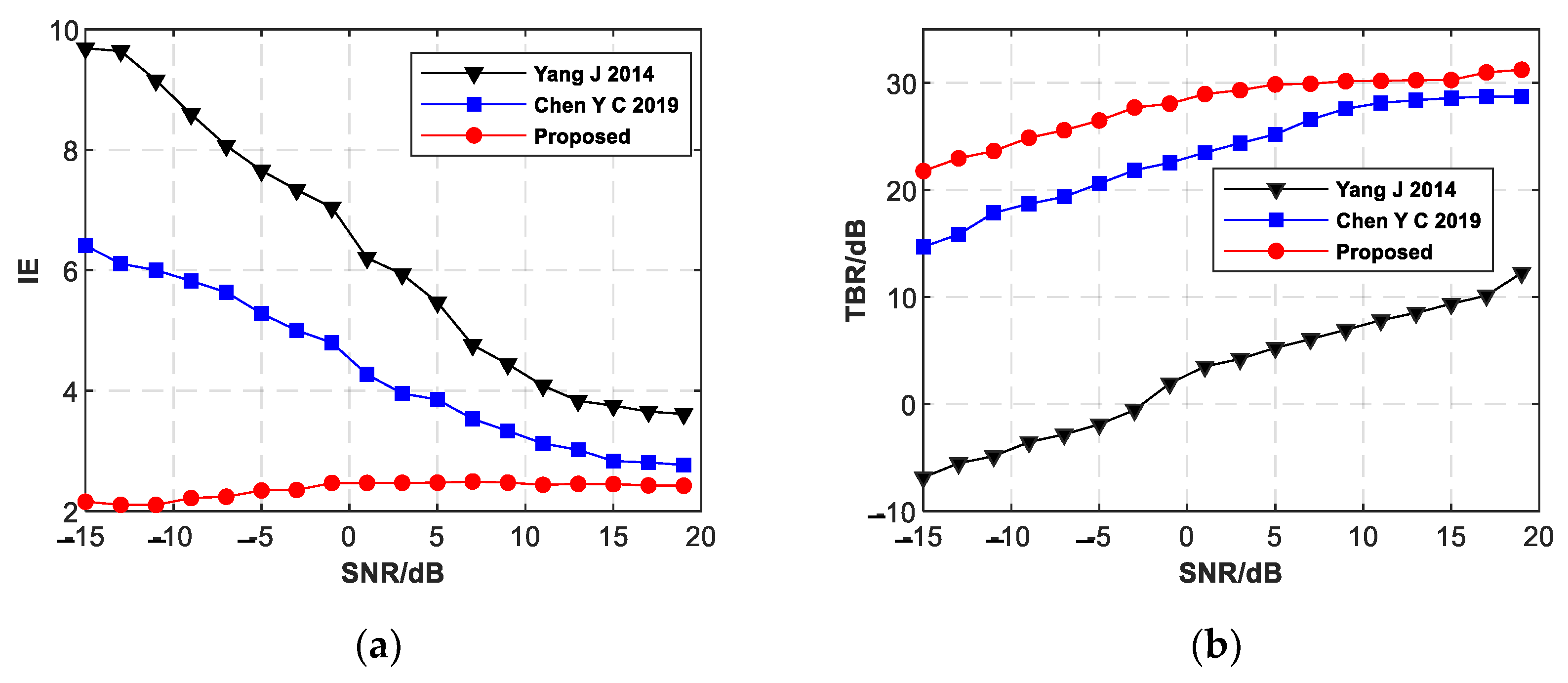
4.1.2. Comparison of Different SNRs
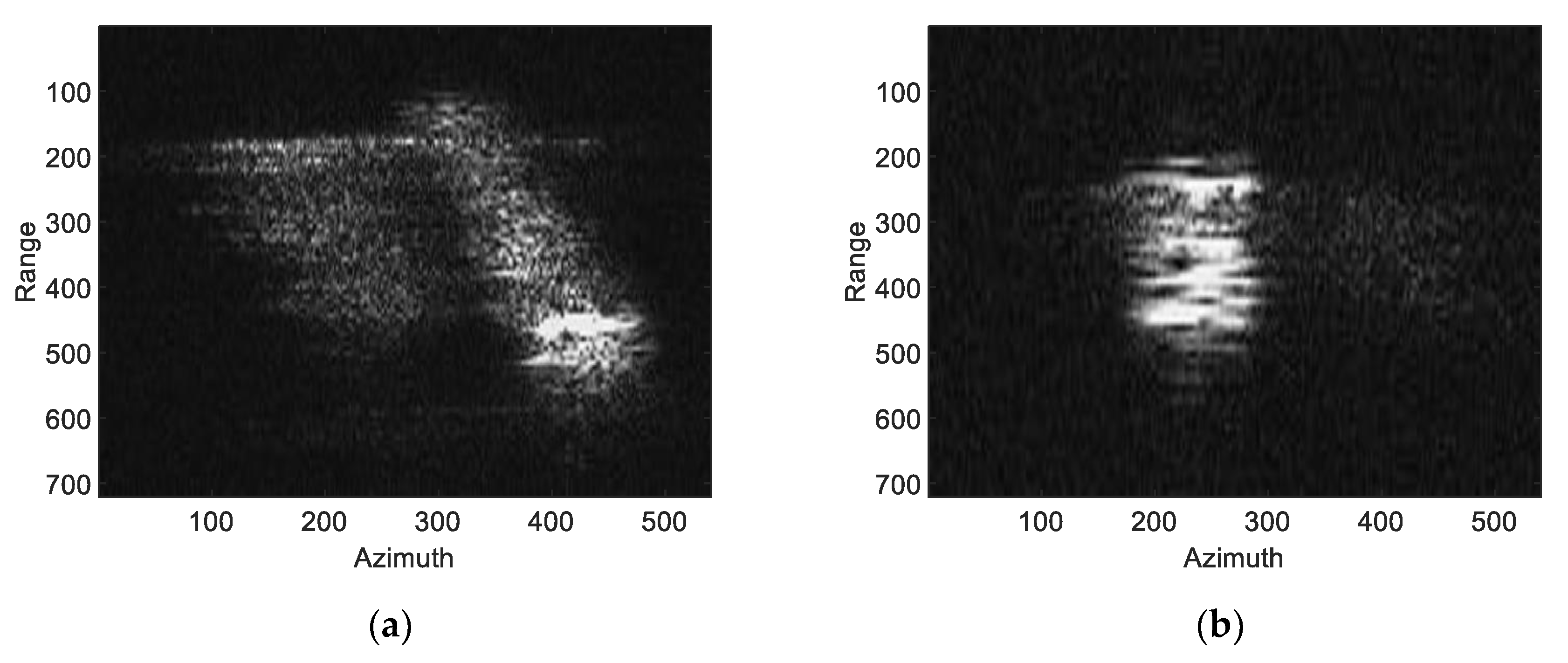
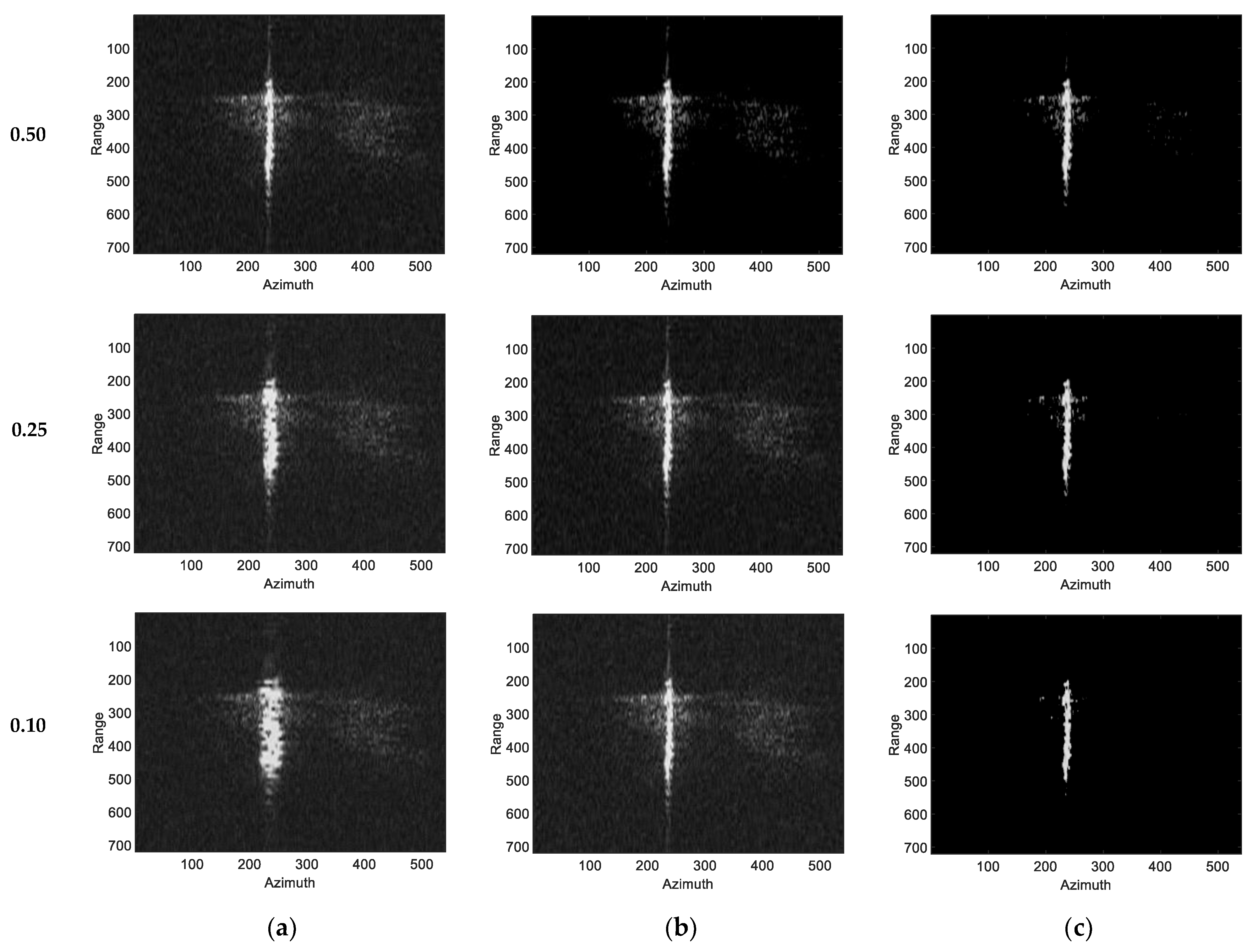
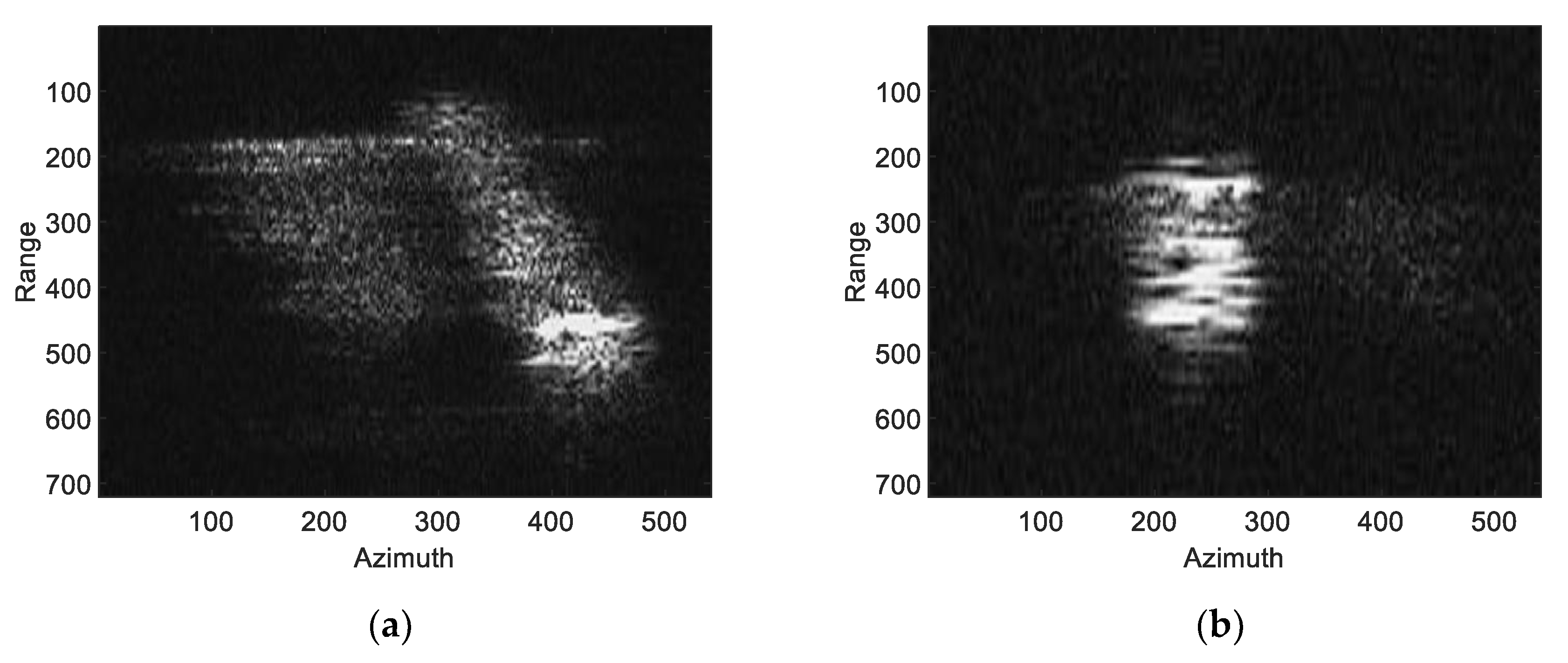
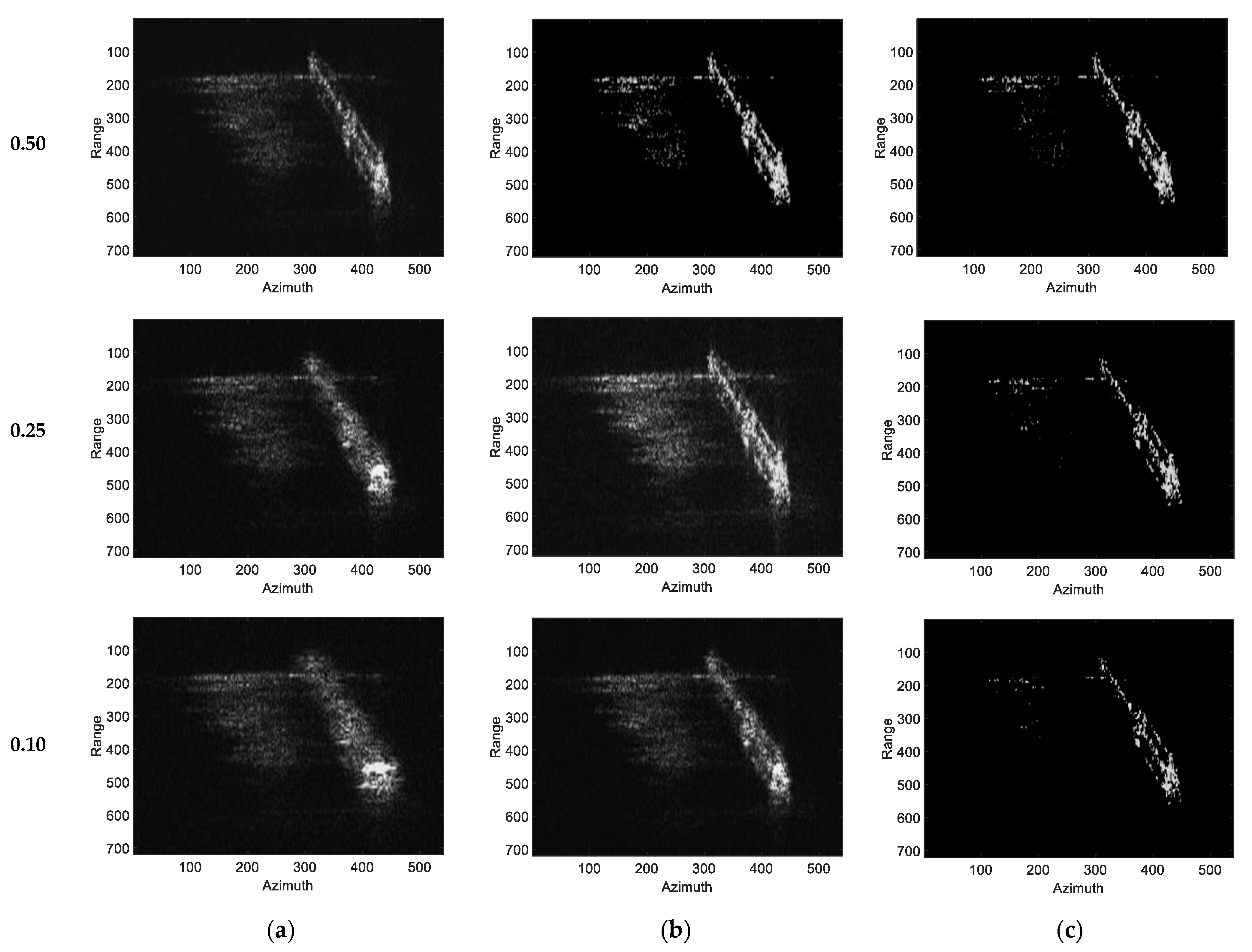
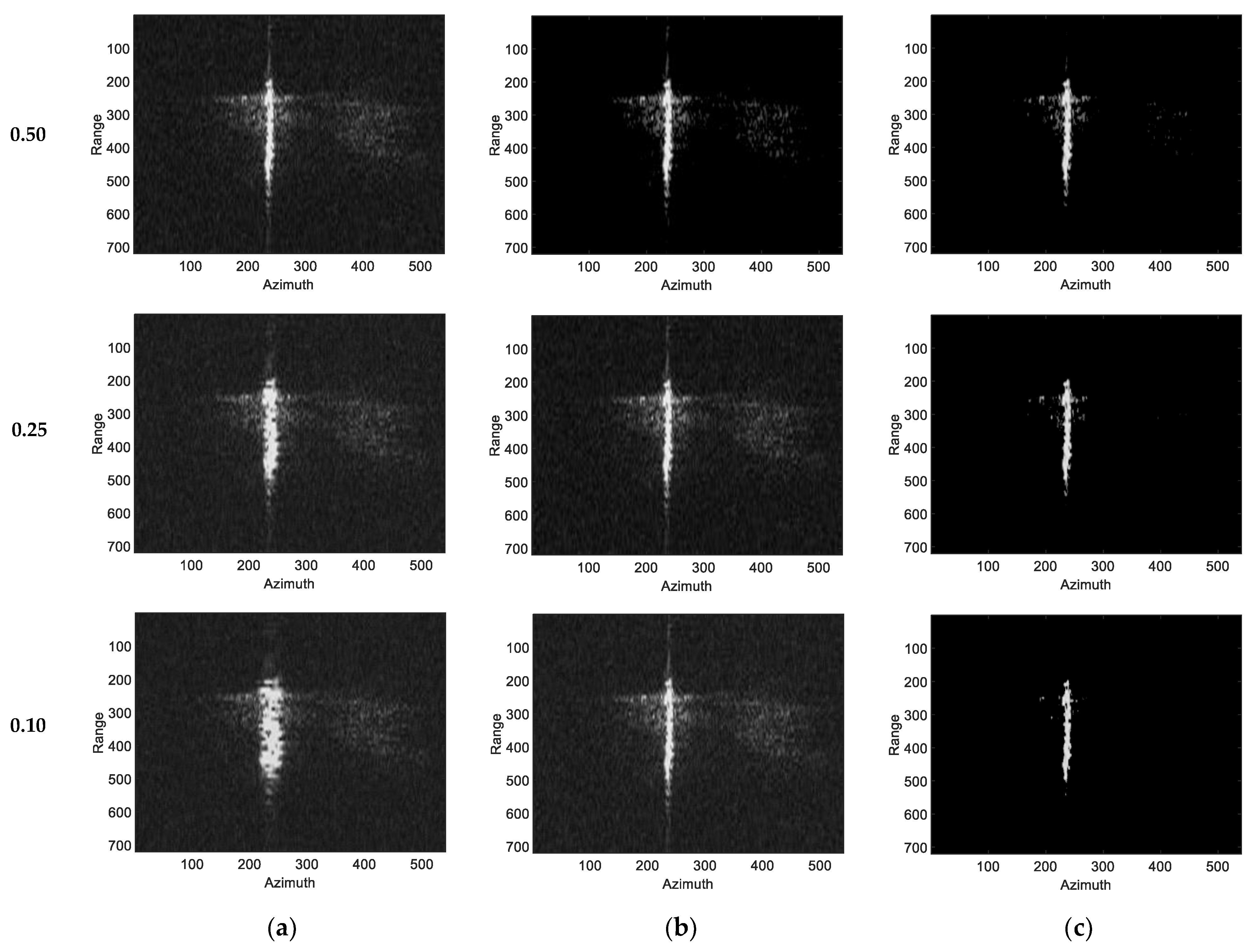
4.2. Measured Data Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Zhou, F.; Zhao, B.; Tao, M.; Bai, X.; Chen, B.; Sun, G. A large scene deceptive jamming method for space-borne SAR. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4486–4495. [Google Scholar] [CrossRef]
- Perry, R.P.; Di Pietro, R.C.; Fante, R. SAR Imaging of Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Jen, K.J. Theory of synthetic aperture radar imaging of a moving target. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1984–1992. [Google Scholar]
- Fienup, J.R. Detecting moving targets in SAR imagery by focusing. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 794–809. [Google Scholar] [CrossRef]
- Tong, X.; Bao, M.; Sun, G.; Han, L.; Zhang, Y.; Xing, M. Refocusing of Moving Ships in Squint SAR Images Based on Spectrum Orthogonalization. Remote Sens. 2021, 13, 2807. [Google Scholar] [CrossRef]
- He, Z.; Chen, X.; Yi, T.; He, F.; Dong, Z.; Zhang, Y. Moving Target Shadow Analysis and Detection for ViSAR Imagery. Remote Sens. 2021, 13, 3012. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Approach for single channel SAR ground moving target imaging and motion parameter estimation. IET Radar Sonar Navig. 2007, 1, 59–66. [Google Scholar] [CrossRef]
- Yang, J.; Liu, C.; Wang, Y. Imaging and Parameter Estimation of Fast-Moving Targets with Single-Antenna SAR. IEEE Geosci. Remote Sens. Lett. 2014, 11, 529–533. [Google Scholar] [CrossRef]
- Li, G.; Xia, X.; Peng, Y. Doppler Keystone Transform: An Approach Suitable for Parallel Implementation of SAR Moving Target Imaging. IEEE Geosci. Remote Sens. Lett. 2008, 5, 573–577. [Google Scholar] [CrossRef]
- Wan, J.; Tan, X.; Chen, Z.; Li, D.; Liu, Q.; Zhou, Y.; Zhang, L. Refocusing of Ground Moving Targets with Doppler Ambiguity Using Keystone Transform and Modified Second-Order Keystone Transform for Synthetic Aperture Radar. Remote Sens. 2021, 13, 177. [Google Scholar] [CrossRef]
- Chen, V.C.; Lipps, R.; Bottoms, M. FOPEN SAR imaging of ground moving targets using rotational time-frequency-Radon transforms. In Proceedings of the 2002 IEEE Radar Conference, Long Beach, CA, USA, 25 April 2002; pp. 154–159. [Google Scholar]
- Huang, P.H.; Xia, X.G.; Gao, Y.S.; Liu, X.Z.; Liao, G.S.; Jiang, X. Ground Moving Target Refocusing in SAR Imagery Based on RFRT-FrFT. IEEE Trans.Geosci. Remote Sens. 2019, 57, 5476–5492. [Google Scholar] [CrossRef]
- Leibovich, M.; Papanicolaou, G.; Tsogka, C. Low Rank Plus Sparse Decomposition of Synthetic Aperture Radar Data for Target Imaging. IEEE Trans. Comput. Imaging 2020, 6, 491–502. [Google Scholar] [CrossRef]
- Kang, M.S.; Kim, K.T. Ground Moving Target Imaging Based on Compressive Sensing Framework with Single-Channel SAR. IEEE Sens. J. 2020, 20, 1238–1250. [Google Scholar] [CrossRef]
- Gu, F.F.; Zhang, Q.; Chen, Y.C.; Huo, W.J.; Ni, J.C. Parametric sparse representation method for motion parameter estimation of ground moving target. IEEE Sens. J. 2016, 16, 7646–7652. [Google Scholar] [CrossRef]
- Chen, Y.; Li, G.; Zhang, Q.; Sun, J. Refocusing of Moving Targets in SAR Images via Parametric Sparse Representation. Remote Sens. 2017, 9, 795. [Google Scholar] [CrossRef]
- Chen, Y.C.; Li, G.; Zhang, Q. Iterative Minimum Entropy Algorithm for Refocusing of Moving Targets in SAR Images. IET Radar Sonar Navig. 2019, 13, 1279–1286. [Google Scholar] [CrossRef]
- Bu, H.X.; Bai, X.; Tao, R. Compressed sensing SAR imaging based on sparse representation in fractional Fourier domain. Sci. China Inf. Sci. 2012, 55, 1789–1800. [Google Scholar] [CrossRef]
- Wu, D.; Yaghoobi, M.; Davies, M.E. Sparsity-driven GMTI processing framework with multichannel SAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1434–1447. [Google Scholar] [CrossRef]
- Kelly, S.; Yaghoobi, M.; Davies, M.E. Sparsity-based autofocus for undersampled synthetic aperture radar. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 972–986. [Google Scholar] [CrossRef]
- Geng, J.; Yu, Z.; Li, C.; Liu, W. Squint Mode GEO SAR Imaging Using Bulk Range Walk Correction on Received Signals. Remote Sens. 2019, 11, 17. [Google Scholar] [CrossRef]
- Zhang, X.P.; Liao, G.; Zhu, S.Q.; Yang, D.; Du, W.T. Efficient Compressed Sensing Method for Moving-Target Imaging by Exploiting the Geometry Information of the Defocused Results. IEEE Geosci. Remote Sens. Lett. 2015, 12, 517–521. [Google Scholar] [CrossRef]
- Li, J.; Xu, C.; Su, H.; Gao, L.; Wang, T. Deep Learning for SAR Ship Detection: Past, Present and Future. Remote Sens. 2022, 14, 2712. [Google Scholar] [CrossRef]
- Zhao, S.Y.; Zhang, Z.H.; Zhang, T.; Guo, W.W.; Luo, Y. Transferable SAR Image Classification Crossing Different Satellites Under Open Set Condition. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Yang, M.J.; Bai, X.R.; Wang, L.; Zhou, F. Mixed Loss Graph Attention Network for Few-Shot SAR Target Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5216613. [Google Scholar] [CrossRef]
- Bai, X.R.; Zhang, Y.J.; Liu, S.Q. High-Resolution Radar Imaging of Off-Grid Maneuvering Targets Based on Parametric Sparse Bayesian Learning. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Mu, H.L.; Zhang, Y.; Ding, C.; Jiang, Y.C. DeepImaging: A Ground Moving Target Imaging Based on CNN for SAR-GMTI System. IEEE Geosci. Remote Sens. Lett. 2021, 18, 117–121. [Google Scholar] [CrossRef]
- Lu, Z.J.; Qin, Q.; Shi, H.Y.; Huang, H. SAR moving target imaging based on convolutional neural network. Digit. Signal Process. 2020, 106, 102832. [Google Scholar] [CrossRef]
- Ito, D.; Takabe, S.; Wadayama, T. Trainable ISTA for Sparse Signal Recovery. IEEE Trans. Signal Process. 2019, 67, 3113–3125. [Google Scholar] [CrossRef]
- Zhang, J.; Ghanem, B. ISTA-Net: Interpretable Optimization-Inspired Deep Network for Image Compressive Sensing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1828–1837. [Google Scholar]
- Yonel, B.; Mason, E.; Yazıcı, B. Deep learning for passive synthetic aperture radar. IEEE J. Sel. Top. Signal Process. 2018, 12, 90–103. [Google Scholar] [CrossRef]
- Wei, S.J.; Liang, J.D.; Wang, M.; Shi, J.; Zhang, X.L.; Ren, H.R. AF-AMPNet: A Deep Learning Approach for Sparse Aperture ISAR Imaging and Autofocusing. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5206514. [Google Scholar] [CrossRef]
- Zhao, S.Y.; Ni, J.C.; Liang, J.; Xiong, S.C.; Luo, Y. End-to-End SAR Deep Learning Imaging Method Based on Sparse Optimization. Remote Sens. 2021, 13, 4429. [Google Scholar] [CrossRef]
- Vujović, S.; Stanković, I.; Daković, M.; Stanković, L. Comparison of a gradient-based and LASSO (ISTA) algorithm for sparse signal reconstruction. In Proceedings of the 2016 5th Mediterranean Conference on Embedded Computing (MECO), Bar, Montenegro, 12–16 June 2016; pp. 377–380. [Google Scholar]
- Zou, F.Y.; Shen, L.; Jie, Z.Q.; Zhang, W.Z.; Liu, W. A Sufficient Condition for Convergences of Adam and RMSProp. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 11119–11127. [Google Scholar]
- Zhang, T.; Zhang, X.; Li, J.; Xu, X.; Wang, B.; Zhan, X.; Xu, Y.; Ke, X.; Zeng, T.; Su, H. SAR Ship Detection Dataset (SSDD): Official Release and Comprehensive Data Analysis. Remote Sens. 2021, 13, 3690. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Ratio | Method | MSE | PSNR | IE | TBR | Imaging Time (s) |
|---|---|---|---|---|---|---|
| 0.50 | Method in [8] | 558.07 | 20.66 | 4.0879 | 9.36 | 6.581 |
| Method in [17] | 60.75 | 30.29 | 2.8309 | 28.58 | 138.52 | |
| Proposed | 50.73 | 31.08 | 2.4221 | 30.26 | 0.924 | |
| 0.25 | Method in [8] | 967.18 | 18.27 | 5.6964 | 3.72 | 4.865 |
| Method in [17] | 113.69 | 27.57 | 4.0006 | 20.76 | 98.25 | |
| Proposed | 74.08 | 29.43 | 2.3598 | 28.31 | 0.641 | |
| 0.10 | Method in [8] | 2672.73 | 13.86 | 6.9410 | −5.63 | 3.021 |
| Method in [17] | 330.75 | 23.94 | 4.6569 | 15.38 | 50.86 | |
| Proposed | 109.61 | 27.73 | 2.2150 | 29.05 | 0.402 |
| Target | Sampling Ratio | Method | IE | Imaging Time (s) |
|---|---|---|---|---|
| Ship 1 | 0.50 | Method in [8] | 4.6600 | 12.081 |
| Method in [17] | 2.5668 | 407.526 | ||
| Proposed | 2.1603 | 1.453 | ||
| 0.25 | Method in [8] | 4.9943 | 9.574 | |
| Method in [17] | 3.1532 | 295.186 | ||
| Proposed | 1.8823 | 0.973 | ||
| 0.10 | Method in [8] | 5.5729 | 5.158 | |
| Method in [17] | 3.8129 | 209.26 | ||
| Proposed | 1.5493 | 0.843 | ||
| Ship 2 | 0.50 | Method in [8] | 4.4520 | 10.835 |
| Method in [17] | 2.6330 | 296.37 | ||
| Proposed | 1.4246 | 1.102 | ||
| 0.25 | Method in [8] | 4.5323 | 6.421 | |
| Method in [17] | 2.8376 | 173.15 | ||
| Proposed | 1.3702 | 0.932 | ||
| 0.10 | Method in [8] | 4.6231 | 4.113 | |
| Method in [17] | 3.5268 | 96.64 | ||
| Proposed | 1.3325 | 0.762 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Ni, J.; Luo, Y.; He, Q.; Lu, X. Sparse SAR Imaging Method for Ground Moving Target via GMTSI-Net. Remote Sens. 2022, 14, 4404. https://doi.org/10.3390/rs14174404
Chen L, Ni J, Luo Y, He Q, Lu X. Sparse SAR Imaging Method for Ground Moving Target via GMTSI-Net. Remote Sensing. 2022; 14(17):4404. https://doi.org/10.3390/rs14174404
Chicago/Turabian StyleChen, Luwei, Jiacheng Ni, Ying Luo, Qifang He, and Xiaofei Lu. 2022. "Sparse SAR Imaging Method for Ground Moving Target via GMTSI-Net" Remote Sensing 14, no. 17: 4404. https://doi.org/10.3390/rs14174404
APA StyleChen, L., Ni, J., Luo, Y., He, Q., & Lu, X. (2022). Sparse SAR Imaging Method for Ground Moving Target via GMTSI-Net. Remote Sensing, 14(17), 4404. https://doi.org/10.3390/rs14174404