1. Introduction
Near-field target localization has attracted considerable attention in recent research, as this technique is widely applied from daily applications to scientific research, such as automotive driving, indoor positioning, speech enhancement, and underground investigations [
1,
2,
3,
4,
5]. Similar to far-field target localization, near-field target localization is aimed at finding the direction and distance of identifiable targets. However, it is certain that the thoroughly studied far-field target localization techniques are not applicable in near-field situations, as the wavefront is considered as a plane wave under far-field assumptions, while waves propagated in the near-field scenario have a spherical wavefront; hence, the phase difference across the array is characterized by a nonlinear function of both the azimuth angle and range [
6]. This characteristic makes the parameter estimation issue more challenging for near-field targets than it is for the existing far-field approaches.
There have been numerous related works focused on near-field target localization or source localization, which can be found in refs. [
6,
7,
8,
9,
10,
11,
12,
13]. These works realized distinct approaches and algorithms, including classic spectral searching methods (e.g., two-dimensional MUSIC (2D-MUSIC) [
6] and Capon [
7]), subarray-based method (e.g., ESPRIT [
8]), the maximum-likelihood estimator (MLE) [
9], second-order statistics (SOS) based methods [
10,
11], and higher-order statistics (HOS) based methods [
12,
13]. Nevertheless, most of these methods suffer from limitations, such as the heavy computational burden owing to multidimensional searching (e.g., MUSIC or MLE), massive efforts on eigen-decomposition (e.g., subspace-based or HOS), and the restriction on array geometry (e.g., subarray-based). Thus, this motivates us to seek a novel approach that provides sufficiently good performance that is only at the cost of relatively low computation consumption.
On the other hand, the implementation of radar systems is another matter to be concerned about. Although most of the aforementioned methods are implemented via MIMO radar, due to its advantages of flexible waveform diversity and spatial diversity [
14], the coupling of angle and range in the near-field signal model means that the estimation of the location parameters cannot be resolved directly. Different from conventional MIMO radar, the combination of FDA and MIMO radar that is referred to as the FDA-MIMO radar, which can provide a range-angle-dependent beampattern and maintain the superiorities of MIMO radar [
15,
16,
17], paves a new way to resolve the parameter estimation problem. Several related studies have been conducted during the past decade [
18,
19,
20,
21], with almost all of these approaches being applicable to the far-field model. To our knowledge, the application of FDA-MIMO for near-field targets has been seldom reported in the literature. Furthermore, FDA-MIMO radar signals are essentially multidimensional, and the matrix-based representation and analysis in conventional methods cannot fully exploit the inherent algebraic structure of these multidimensional data [
22,
23], this problem requires further investigation.
Tensor algebra and tensor analysis allow us to deal with high-dimensional signals from a new perspective [
24,
25,
26]. Literature addressing the problem of target localization based on tensor analysis can be found in refs. [
27,
28,
29,
30,
31,
32] for far-field targets and in refs. [
33,
34,
35,
36,
37] for near-field targets. The authors of [
27] systematically developed tensor-based signal model formulations and their corresponding solutions under three types of MIMO radar configurations, establishing a theoretical foundation for follow-up studies, including trilinear-decomposition based methods [
29,
30]; the unitary parallel factor (PARAFAC) method [
31]; and the higher-order singular value decomposition (HOSVD) method [
32]. However, directly extending these methods to near-field situations degrades their performance, and the methods may even fail, owing to the nonlinear property in the signal model. In contrast, ref. [
33] used a quadric wavefront approximation model for the two-dimensional near-field localization problem and successfully achieved target parameter estimation based on tensor decomposition. However, there was a non-neglected systematic error in the estimated range and angle caused by the use of the Fresnel approximation model [
34], leading to a degradation in accuracy. To overcome this drawback, some effective approaches have been proposed via the correction procedure [
35] or via formulation with an exact model [
36,
37]. The above tensor-based approaches exhibit significant superiority over conventional methods, which motivates us to establish a solution based on the power of multilinear algebra rather than on conventional matrix-based methods.
In this paper, we focus on the problem of localizing multiple targets in the near-field region via a symmetric monostatic FDA-MIMO radar. Motivated by the existing tensor-based signal model that is applicable to far-field scenarios, we extend it to near-field situations and propose a corresponding parameter estimation approach by leveraging the power of tensor analysis and the advantage of FDA-MIMO radar. The main contributions of this paper are summarized as follows:
1) A tensor-based signal model applicable to near-field multiple target localization is formulated in this work. Meanwhile, an improved trilinear decomposition algorithm is introduced to improve the numerical stability when solving tensor decomposition.
2) A novel target localization algorithm named TenDLA is developed based on tensor analysis. Joint range and angle estimation can be solved using TenDLA with relatively good accuracy, and the aforementioned systematic errors encountered in some existing localization methods are mitigated effectively.
3) Compared to conventional methods, the proposed tensor-based method has the merits of simplicity and efficiency, owing to its advantage of search-free and automatic pairing.
The remainder of this paper is organized as follows.
Section 2 introduces the signal model of monostatic FDA-MIMO radar. In
Section 3, the proposed joint estimation of angle and range as well as the corresponding correction procedure are presented. The performance analysis and numerical simulations are presented in
Section 4 and
Section 5, respectively. Finally, conclusions are drawn in
Section 6.
Notations: (.)
*, (.)
T, (.)
−1 and (.)
† denote the complex conjugation, transpose, inverse and psedo-inverse operations, respectively.
stands for the Frobenius norm and
diag(
a) stands for the diagonal matrix of vector
a. Scalars, column vectors, matrices, and tensors are denoted by lowercase letters, boldface lowercase letters, boldface uppercase letters and calligraphic uppercase letters, respectively, such as
. The symbol of
,
,
and
represent the Kronecker product, Khatri-Rao product, Hadamard product and the vector outer product, respectively. Definitions of product rules used in this paper are given in
Table 1.
2. Signal Model
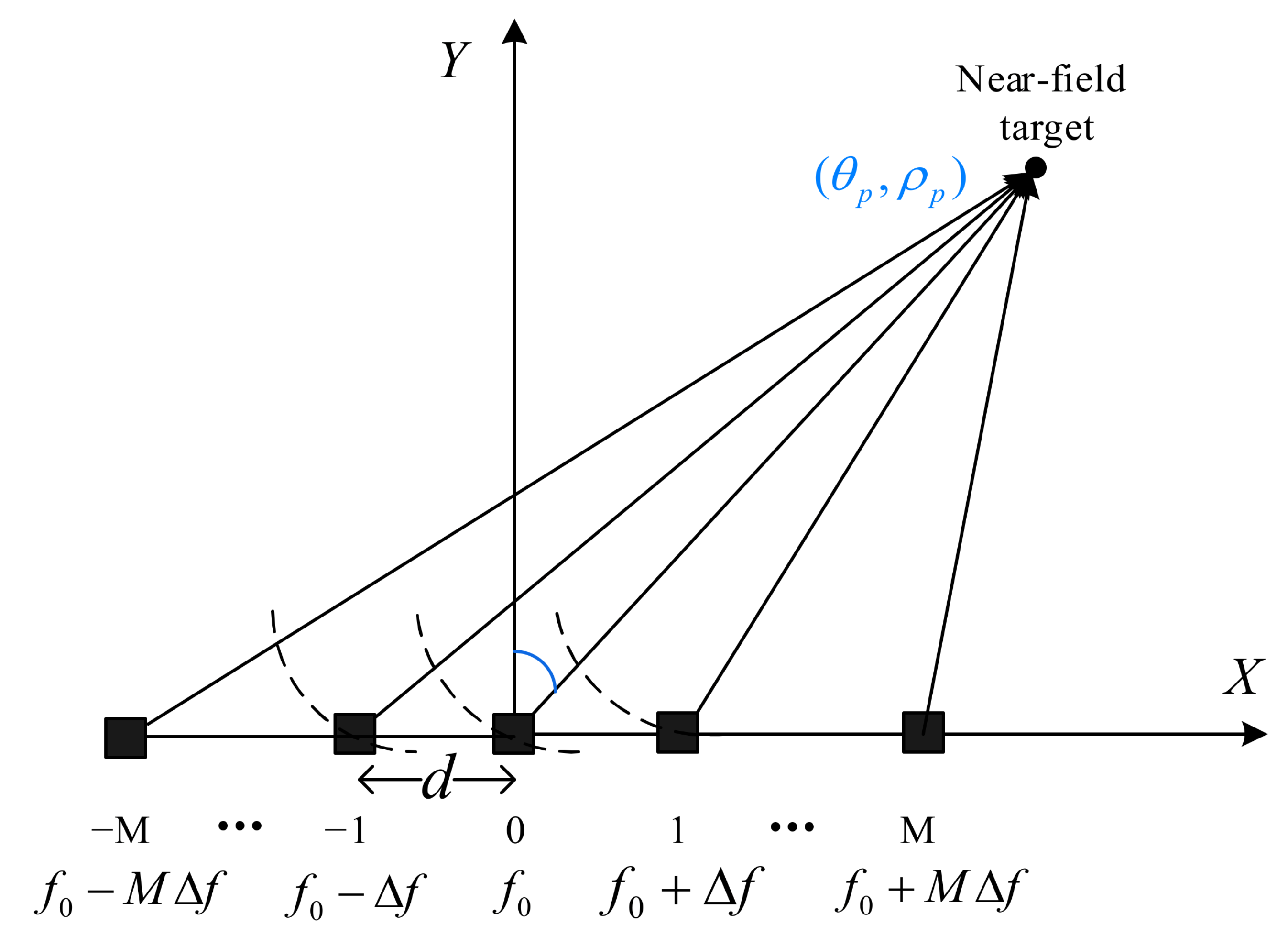
We consider a symmetric monostatic FDA-MIMO radar system in which the transmitter is an FDA and the receiver is a phased array. As shown in
Figure 1, the FDA-MIMO radar consists of 2
M + 1 uniformly spaced transceiver antennas, and the transmit array and receive array are collocated. There are
P uncorrelated targets located away from the antenna array with deterministic location parameters {
θp,
ρp}, where
θp and
ρp are the angle and range of the
pth target relative to the center of the antenna array, respectively. It is assumed that all of the targets in this paper are located in the near-field region (also called the Fresnel region [
38]) of the antenna array, i.e., the distance between the target and antenna array is within the range of [0.62(
D3/
λ)
1/2, 2
D2/
λ], where
D is the array’s aperture given by
D = 2
Md, and
d is the array element spacing.
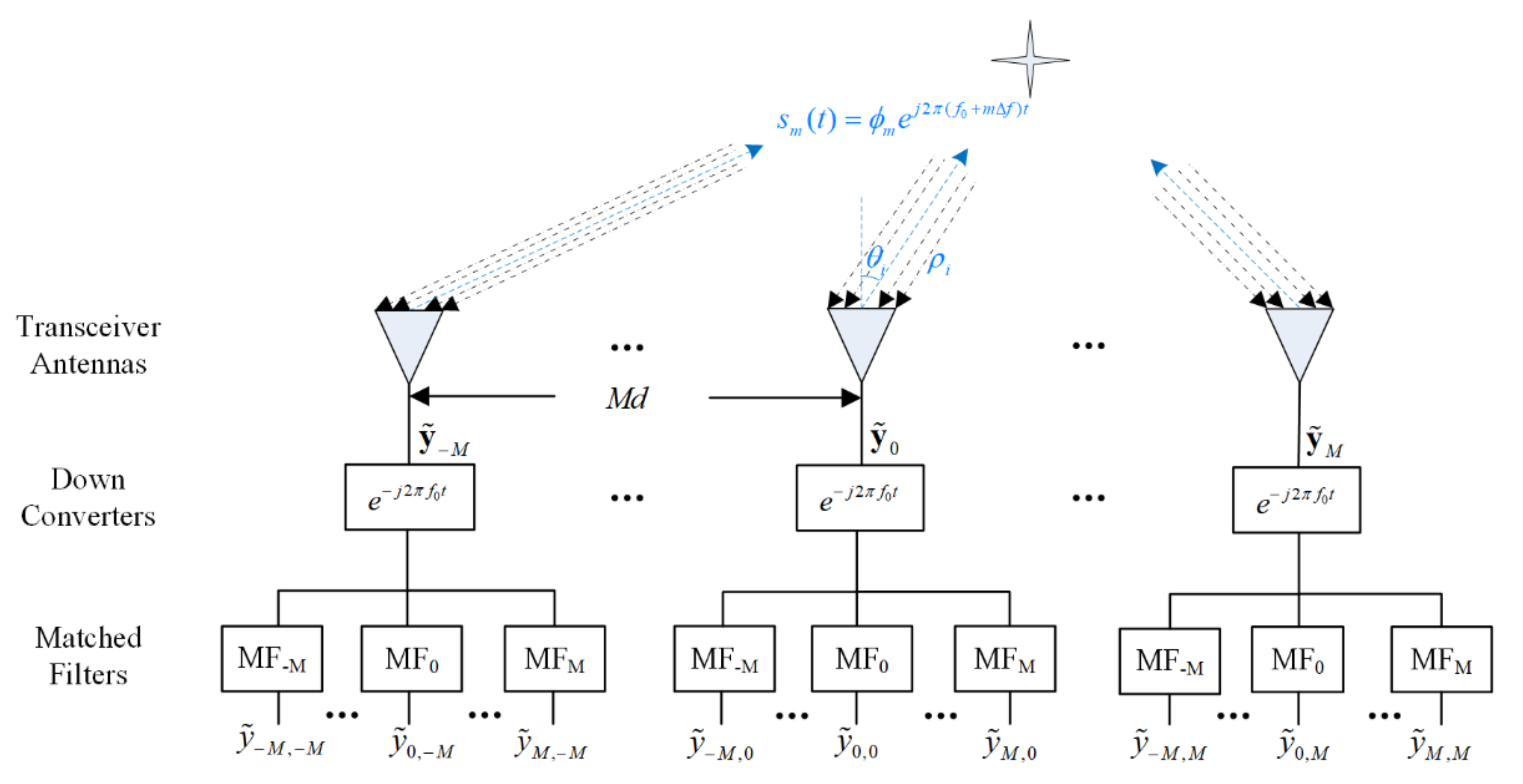
We assume that the carrier frequency and the transmitted signal of the
mth transmit antenna are given as
and
where
f0 is the carrier frequency of the reference element in the transmit array, Δ
f is the linear frequency increment between adjacent elements,
denotes the
mth orthogonal baseband waveform with unit power, and
Tp is the radar pulse duration. Without loss of generality, we assume that the entire radar detection process consists of
L consecutive pulses.
Let the array center be the phase reference point, then the signal received by the
nth element can be expressed as
where
βp(
t) is the complex-valued reflection coefficient of the
pth target, and
t denotes the sampling instant.
τt,(m,p) and
τr,(n,p) are the transmit and receive time delays, respectively, which have a positive correlation with the wave path differences of
and
, which are given as.
and
Since the path difference in the signal model is a nonlinear function of range and angle, one general decoupling strategy with lower computational complexity is to approximate the path difference with second-order Taylor expansion, e.g., refs. [
8,
10]. It follows that the approximation of (4) and (5) are denoted as
and
where
ωp = −
dsin(
θp),
φp = [
d2cos2(
θp)/
ρp]/2.
After coherent processing and matched filtering as shown in
Figure 2, the output of the receiver array for the
lth pulse period can be stacked as a column vector, which is written as
where
and
denote the receive and transmit steering vector with respect to the
pth target, respectively, which are given by.
and
Now let us consider the coherent processing interval (CPI) with
L consecutive pulses. For some specific applications, such as low-slow-small (LSS) target detection, the radar cross section coefficient (RCS) of the target is no longer constant during the CPI, i.e., the RCS of the target fluctuates from time to time. Under this circumstance, the general scheme to fit the RCS fluctuations is modeled using the Swerling II target model [
39]. It follows that the final output of the radar system with
L consecutive pulses can be written as the following compact form, which is based on the derivations in refs. [
18,
27].
Herein, we take into consideration the impact of noise in realistic scenarios, where N is the additive noise term and is typically modeled as additive white Gaussian noise (AWGN), and denote the receive and transmit steering matrices, respectively, and is the RCS coefficient matrix containing the complete RCS information during the CPI, which is defined by and .
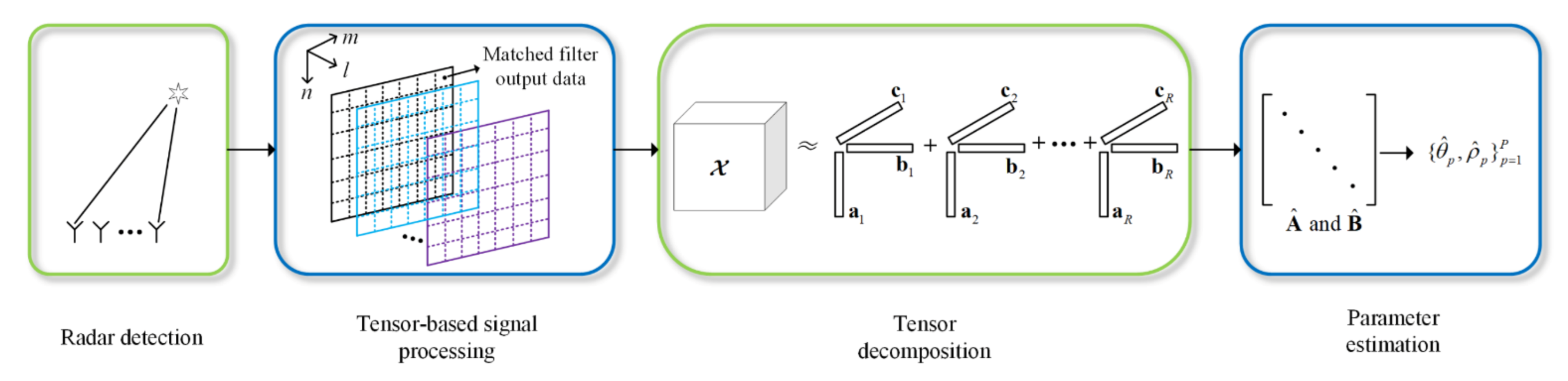
Based on multilinear algebra, (11) is a typical three-way parallel factor (PARAFAC) model, i.e.,
Xs is the matrix unfolding of a three-order tensor
, whereas
can be tensorized from its unfolding form. As discussed in the Introduction section, conventional matrix-based approaches only exploit the pairwise interactions of this flattened model, in other words, only the “one-dimensional” information is used, which leads to performance deterioration, especially in lower signal-to-noise-ratio (SNR) cases; see [
23,
32]. To overcome this limitation, by leveraging the power of multilinear algebra, we reformatted the data model to be a tensor-based signal model, making it possible to exploit the multiple interactions and couplings hidden in the multidimensional nature of received signals. Detailed analysis and derivations are provided in the following sections.
5. Results and Discussion
In this section, a series of numerical simulations are conducted to verify the validity and effectiveness of the proposed approach. For consistency and believability, unless stated otherwise, the experiments are conducted with the parameters shown in
Table 2. Note that the element spacing is
d =
λ/4, in order to avoid phase ambiguity [
10]. Meanwhile, the pulse width was chosen to be
, according to ref. [
45]. It can be assumed that there are three near-field targets located at (0,9
λ), (3
λ,6
λ), and (−6
λ,3
λ), representing three types of azimuth angles: zero, minor, and major azimuth angles, respectively. Echo data were generated according to the PARAFAC model in
Section 2, and it was assumed that the additive noise was AWGN.
The performance evaluation was determined using the root mean square error (RMSE) and the successful detection ratio via hundreds of independent Monte Carlo trials. The RMSEs of angle and range are defined as
and
where
K is the total number of Monte Carlo trials, and
θp and
ρp indicate the true angle and range of the
pth target, respectively. Moreover, the detection in one trial is defined as a success when the Euclidean distance between the estimated location and the real location of the target is within a given tolerance. Consequently, the successful detection ratio is defined as the number of successful cases divided by the total number of cases.
5.1. The Impact of Radar Parameters
According to the theoretical analysis in
Section 3, the estimation of angle and range are sensitive to radar parameters, including the number of array elements
N (herein
N = 2
M + 1), the number of transmitted pulses
L, and the frequency increment Δ
f in the FDA radar. To explore the association between these parameters and estimation performance, the control variable method is utilized in the following experiments.
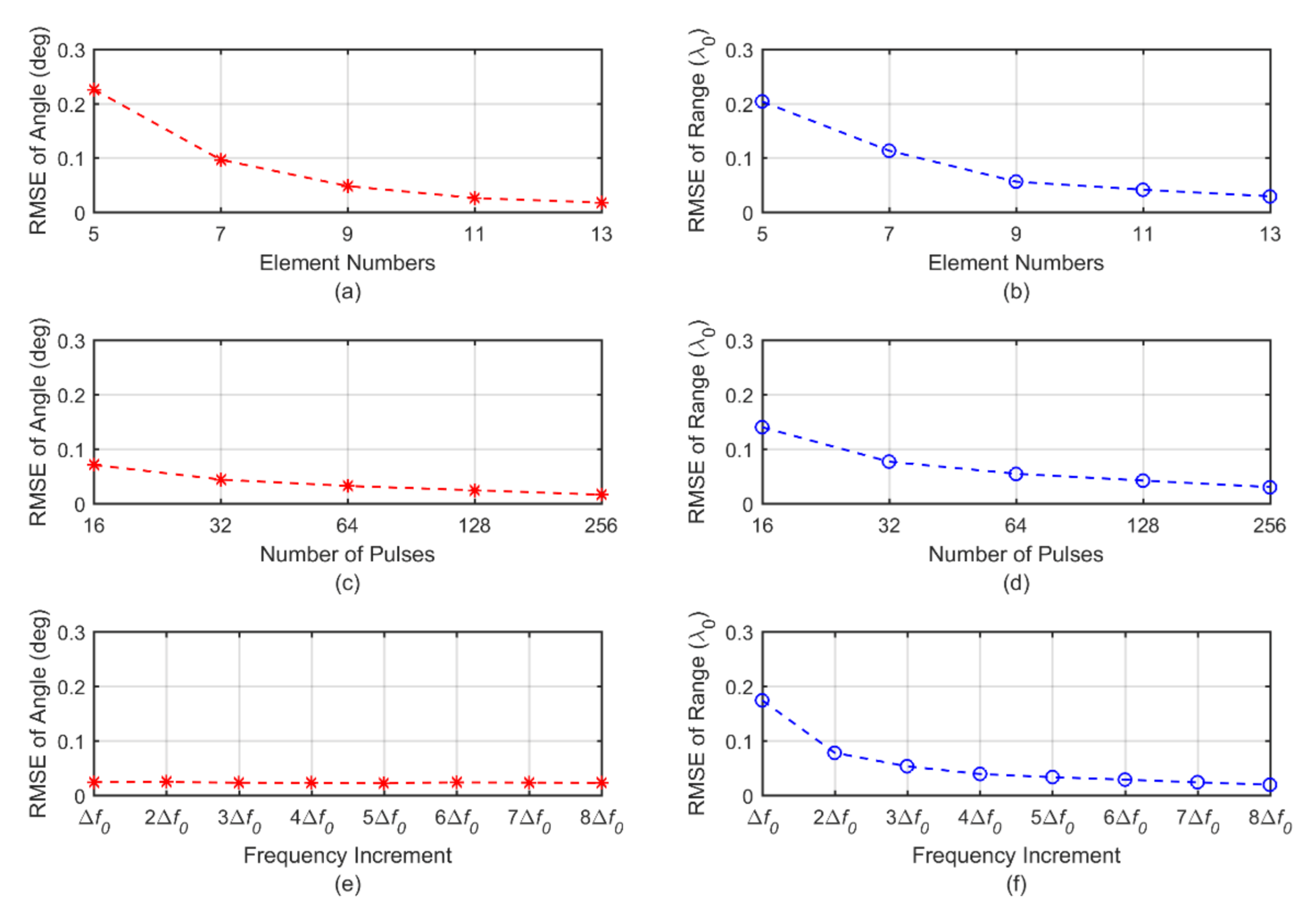
Figure 4 shows the association between radar parameters and estimation performance, where the red dashed line indicates the RMSE of angle versus the variation in
N,
L, and Δ
f, respectively, and the blue dashed line represents the tendency of the RMSE of range. Numerical simulations are conducted by varying one parameter and fixing the other two, and then alternating them. From
Figure 4a,b, it is certain that the estimation accuracies of angle and range are enhanced as the array element numbers increase, owing to the diversity gain in the spatial domain. However, increasing element numbers requires greater computational and hardware overhead costs. Similarly,
Figure 4c,d show that the estimation performance is improved when the number of pulses is multiple, due to the diversity gain in the time domain. Note that the use of multiple of pulses will lead to huge computational costs; hence, increasing the number of pulses to a high number does not represent an efficient method to pursue performance improvement. Furthermore, the impact of the frequency increment in the FDA is different from the other two parameters. Experiments were conducted by changing the argument of Δ
f from Δ
f0 to seven times Δ
f0, in which Δ
f0 = 2.5 MHz. From
Figure 4e,f, it is clear that the RMSE of angle was independent of the frequency increment, whereas the RMSE of range was sensitive to Δ
f. This is reasonable since the estimation of range was computed using the range-frequency-dependent terms in the steering vector, while solving angle was unrelated to this argument. It seems that the larger the frequency increment is, the more accurate the estimation of range will be. However, if a larger frequency increment was chosen in the FDA, the fundamental premise of Δ
f <<
f0 was no longer satisfied, leading to the signal model of (8) becoming invalid. Moreover, according to the range constraint defined in (29), the unambiguous range is inversely proportional to the frequency increment. Based on numerical experiments, it is appropriate to set Δ
f to be around a megahertz for near-field scenarios.
Consequently, in order to achieve better performance as well as to balance the computational cost, it is necessary to make a trade-off regarding the choice of N, L, and Δf.
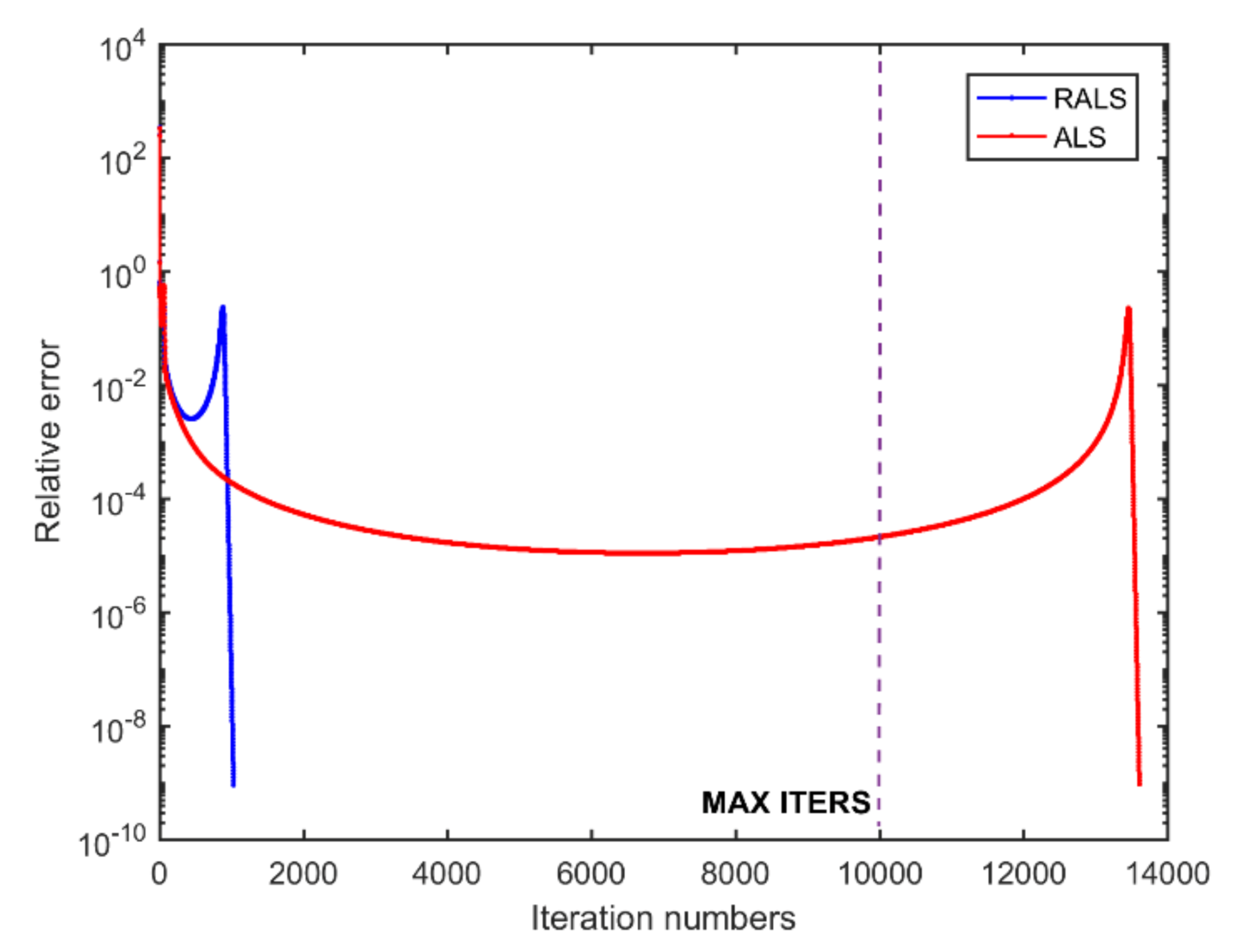
5.2. Numerical Comparison of the RALS and ALS
Since solving the factor matrices with RALS is an integral part of TenDLA, it is necessary to make a comparison with the ALS algorithm in order to investigate its capacity against the swamp problem, which has a great influence on follow-up procedures. The performance evaluation was conducted with a total of 1500 independent Monte Carlo runs under three types of scenarios. To guarantee fairness and believability, the comparison was conducted using the same input data and factor matrix initialization for every Monte Carlo trial.
The performance indicators in this comparison are the average number of iterations (AIS), the average computational time (ACT, in seconds), and the ratio of trials above the set maximum iterations (RaMAX). All of the numerical simulations were performed on a desktop computer with an i7-6700 CPU and 16 GB of memory.
Table 3 shows the quantitative analysis of the comparison between RALS and ALS. It is clear that RALS outperformed ALS, since it achieved a relatively better performance both on convergence rate and computational cost which is characterized as the AIS of RALS being much lower than that of the ALS algorithm. It is also indicated that RALS can shorten the swamp problem encountered in some ill-conditioned trials to some degree. This is demonstrated in
Figure 5 as well, in which RALS effectively shortens the swamp phenomenon with only 1029 iterations compared with the over 13,000 ALS iterations under the condition of encountering an ill-conditioned trial. Furthermore, since the real ALS iteration number in this trial is over the predetermined maximum iteration number, the iterative procedure terminates within the allotted steps whereas the convergence criterion has not been satisfied, leading to a large relative error to solve the CP decomposition and then resulting in performance degradation or incorrect estimation. In contrast, when employing RALS instead of ALS, the number of biased trials can be reduced. The experiment results are consistent with the theoretical analysis in
Section 3.2 and demonstrate the superiority of RALS.
5.3. Performance Evaluation of TenDLA
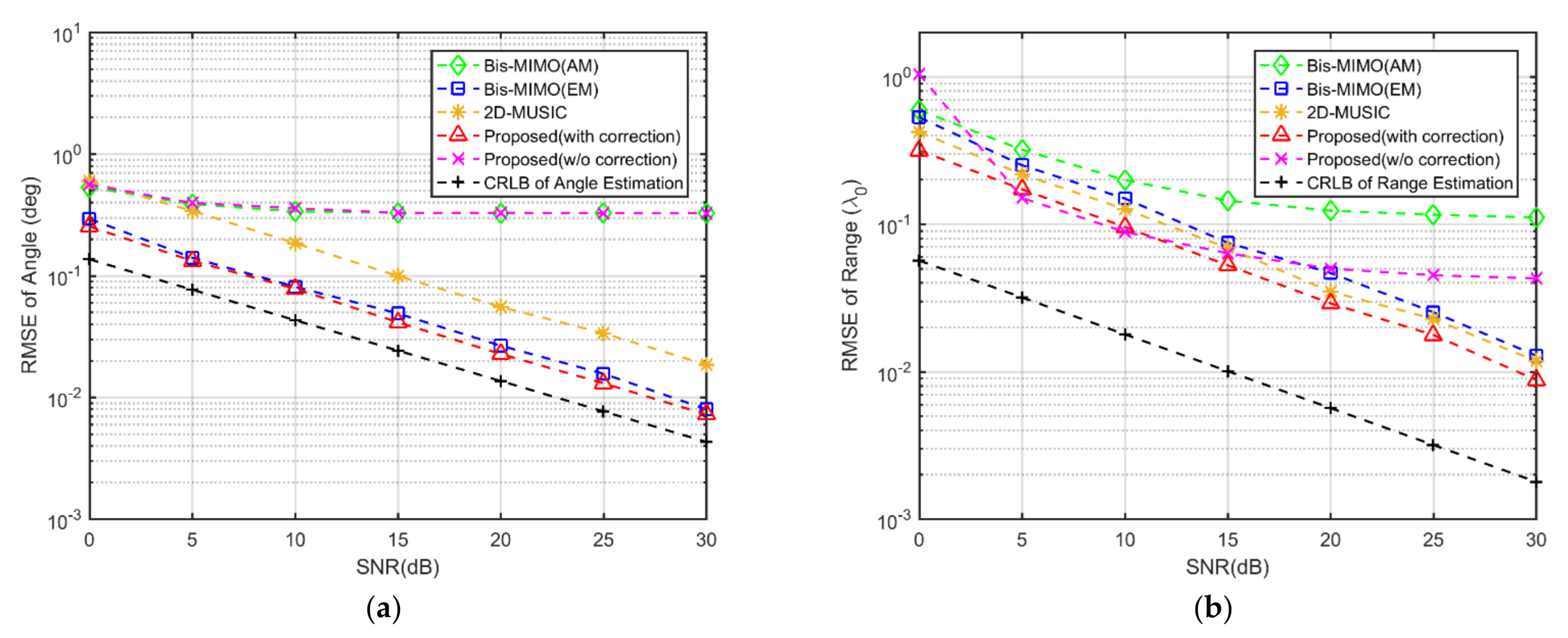
In this section, we compare the performance of different localization techniques via Monte Carlo experiments. Comparisons were made with two existing tensor-based approaches as well as an extensively applied method, including the approximation model based method with the bistatic MIMO radar (Bis-MIMO(AM)) proposed in ref. [
33], the corresponding exact model based method (Bis-MIMO(EM)) proposed in ref. [
37], and the 2D-MUSIC presented in ref. [
7]. To better illustrate performance enhancement via the correction procedure, we also included the estimates achieved using our approach both with correction and without correction.
Figure 6a,b show the estimation accuracy versus the SNR. For each SNR value, we conducted 200 independent Monte Carlo runs. From the graphs, we can observe that the proposed approach achieves the most optimal estimation performance for both angle and range compared to the other approaches. On angle estimation, the proposed approach achieved good accuracy that is close to that of Bis-MIMO(EM), and it outperformed the Bis-MIMO(AM) and 2D-MUSIC, demonstrating a significant improvement; in other words, it is possible to achieve comparable estimation accuracy to the exact model based method after angle correction, even if only an approximation model is used. For range estimation, the proposed TenDLA achieved the most optimal resolution compared with the other methods. This can be attributed to the improvement in the spatial resolution by the FDA-MIMO radar and the full exploitation of the signal correlation, which has been discussed in
Section 3.2. Additionally, in terms of the comparison between the estimates with correction and without correction in TenDLA, we can clearly observe that the RMSEs of angle and range in the cases with correction decreased as the SNR grew, revealing that the systematic bias caused by the use of the approximation model was mitigated effectively.
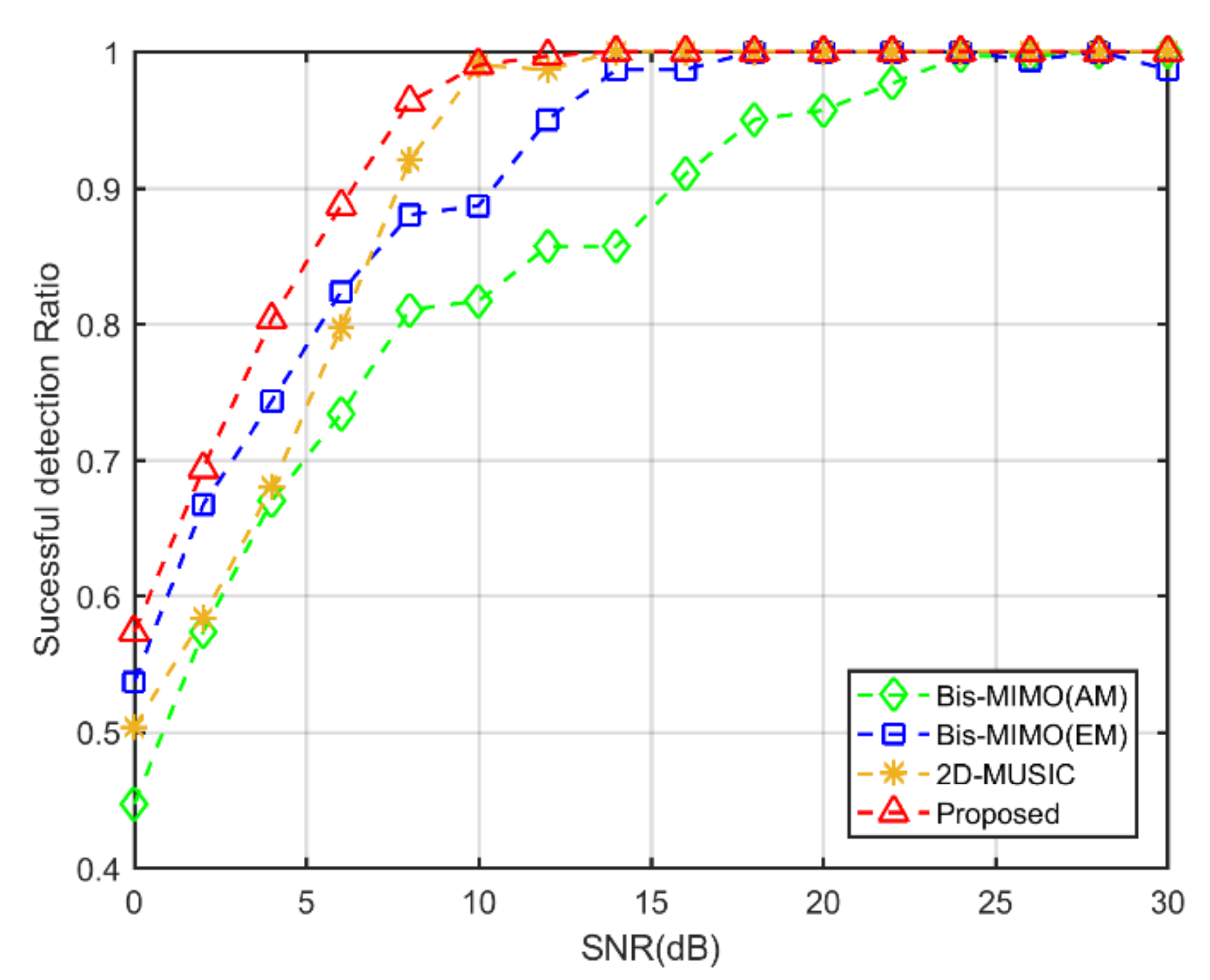
Figure 7 shows the comparison of the successful detection ratio versus the SNR. In this experiment, the parameter settings were the same as they had been previously, and the admitted tolerance for successful detection was determined to be
λ/4. On the whole, the successful detection ratio increased as the SNR grew. This makes sense since the estimation accuracy will improve as the noise decreases. Individually, it can be seen from the graph that, although all the methods achieved a high success ratio that was close to 100% in cases where the SNR was high, the proposed approach had a lower SNR threshold compared with other methods. Particularly in low-SNR situations (lower than 10 dB), the proposed method outperformed the other methods, showing improvements of over 10%. It is obvious that the proposed approach is more appropriate in difficult situations than the contrast methods in terms of detection.
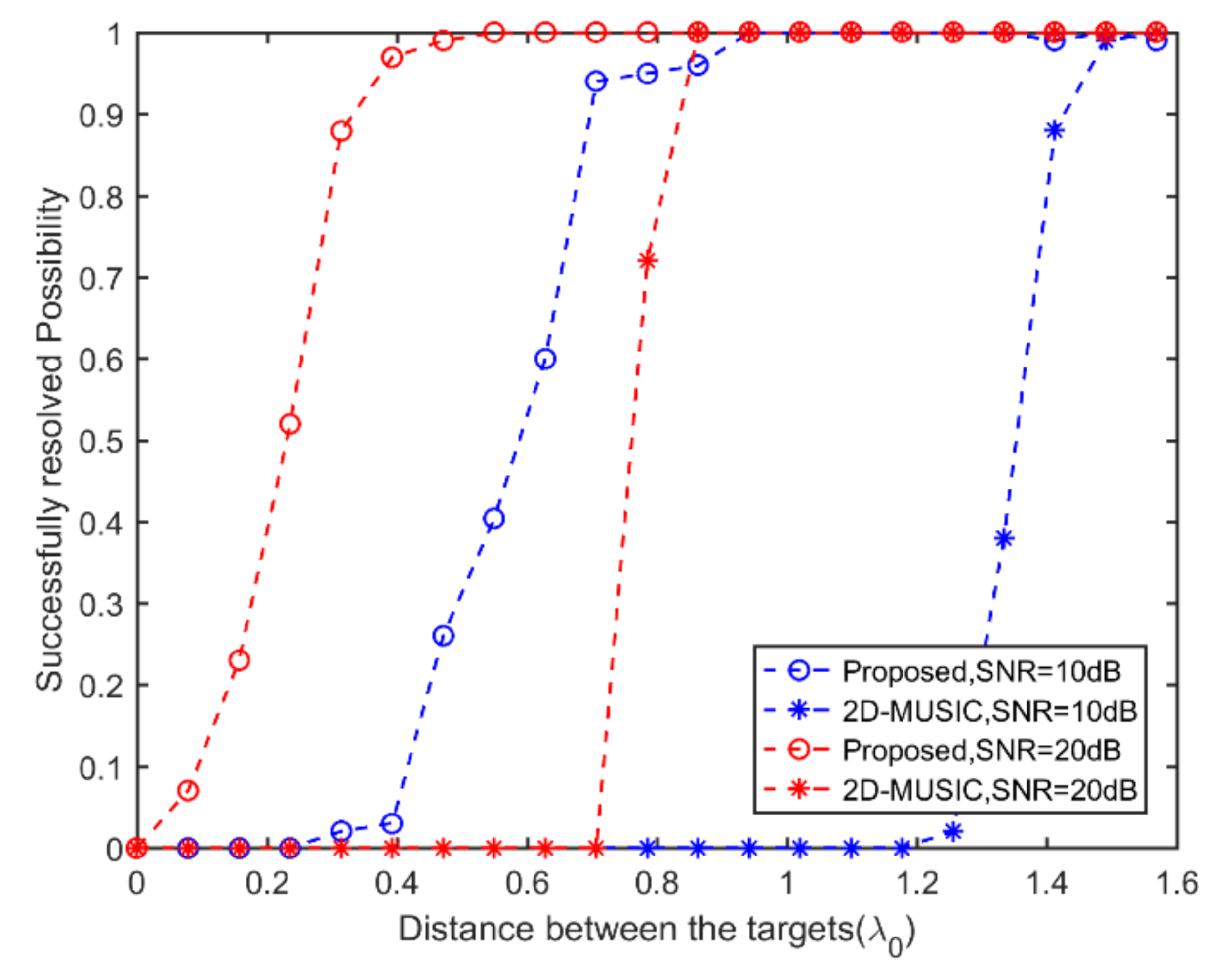
Another prime evaluation indicator is the resolving capability versus the SNR for two closely spaced targets, which can be evaluated via the possibility of the successful detection defined in ref. [
37]. We chose the acknowledged super-resolution 2D-MUSIC algorithm as a comparison method. As shown in
Figure 8, our proposed method has a much better robust resolution capability than the comparison method; more specifically, it can successfully distinguish two closely spaced targets, even when the distance between the two targets is smaller than half of a wavelength at an SNR of 20 dB and smaller than almost a full wavelength at an SNR of 10 dB.
We also performed a computational cost comparison among different methods. In this experiment, we computed the AIS and ACT by averaging the data obtained during each trial. In terms of AIS, it can be observed from
Figure 9 that the proposed approach requires approximately equal iterations to achieve convergence compared to the other two existing tensor-based approaches. This can be verified from the ACT results as well. Since the 2D-MUSIC algorithm requires no iterations, the corresponding computational complexity is indicated by the ACT. Obviously, the computational costs of the proposed approach are much lower than those of the extensively used MUSIC-like algorithm.
5.4. Discussion
The results obtained from various numerical experiments confirmed the effectiveness and robustness of our proposed TenDLA. In conclusion, the attractive advantages of the proposed approach relative to the existing methods are as follows:
1) Improved estimation accuracy: judging from the numerical experiments on estimation accuracy, compared with existing methods, it is clear that TenDLA provides a much better estimation accuracy relative to the recently proposed tensor-based methods, and even outperforms the acknowledged super-resolution algorithm (MUSIC-like algorithms). The systematic biased error encountered in the approximation propagation model based cases was mitigated effectively. Furthermore, the proposed method has a relatively good resolution capability to distinguish two closely spaced targets. The improvement in resolution contributes to the power of tensor-based signal processing and the advantage of FDA-MIMO radar.
2) Simplicity: from the abovementioned numerical experiments on computational cost, we determined that TenDLA has fewer computational costs than conventional spectral searching-based method. This makes sense because the proposed approach is search-free, i.e., the target parameters are resolved via a well-designed strategy that is composed of an algebraic decomposition and a low-cost LS estimation. It does not require taking efforts on multidimensional spectral searching and parameter pairing. Moreover, relative to the existing tensor-based methods, the proposed method has a similar level of complexity. Only a few extra computations are required to fulfill the correction procedures, which are inexpensive and result in improvements in accuracy.
3) Robustness: in some situations, such as the power of the echoes is too low or when two targets are closely spaced, conventional methods (e.g., MUSIC) are usually unable to detect or distinguish the targets clearly. Judging from the results in
Figure 6 and
Figure 8, it is clear that the proposed method exhibits better performance in difficult situations, both in low-SNR cases and in cases where there are two closely spaced targets. Additionally, when calculating the CP decomposition encountering ill-conditioned cases, the TenDLA offers the capacity to shorten the swamp problem relative to the conventional ALS-based approach, making it possible to gain improvement in numerical stability.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}