
A Generalized Labeled Multi-Bernoulli Filter Based on Track-before-Detect Measurement Model for Multiple-Weak-Target State Estimate Using Belief Propagation


Abstract
:1. Introduction
2. Background
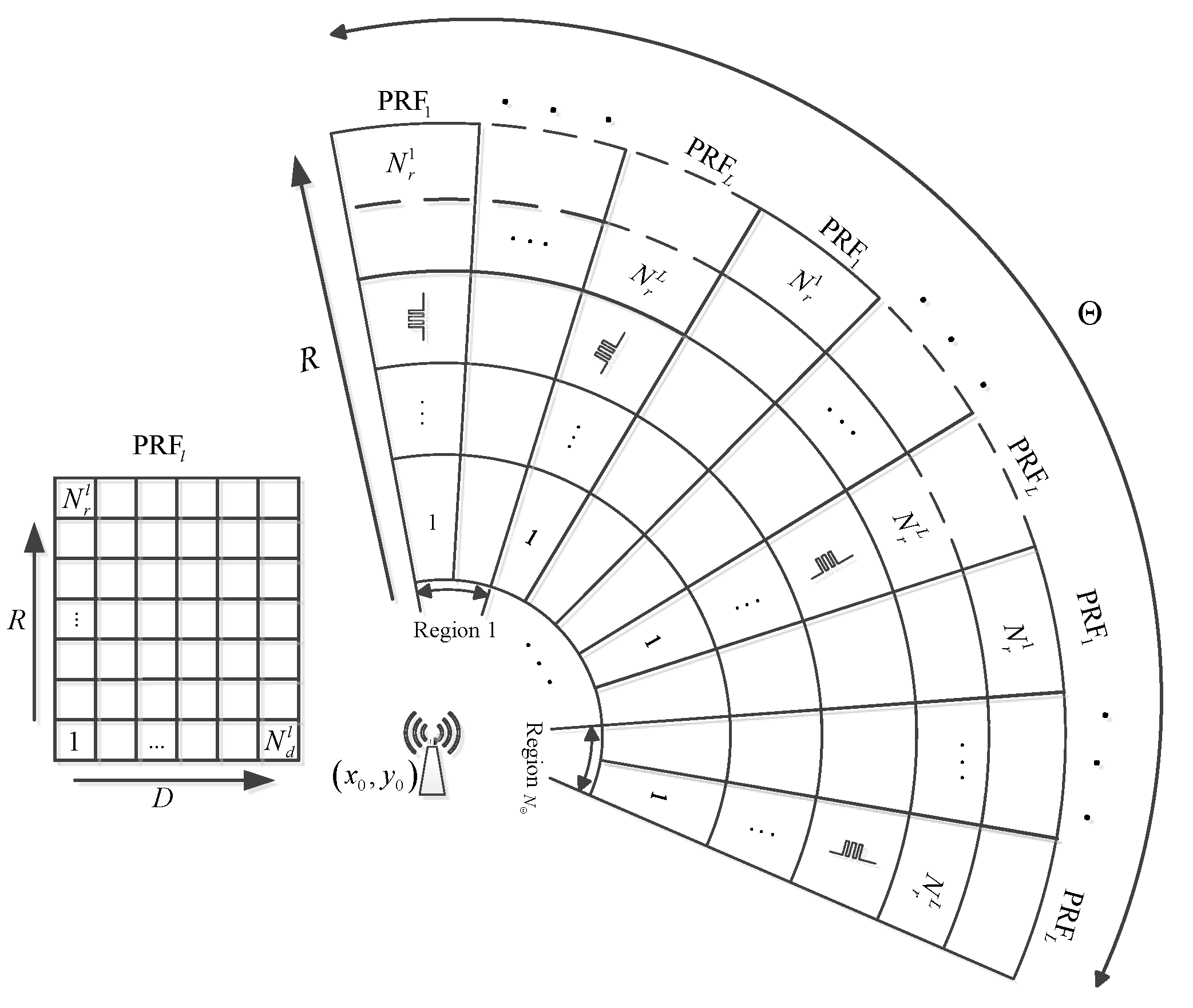
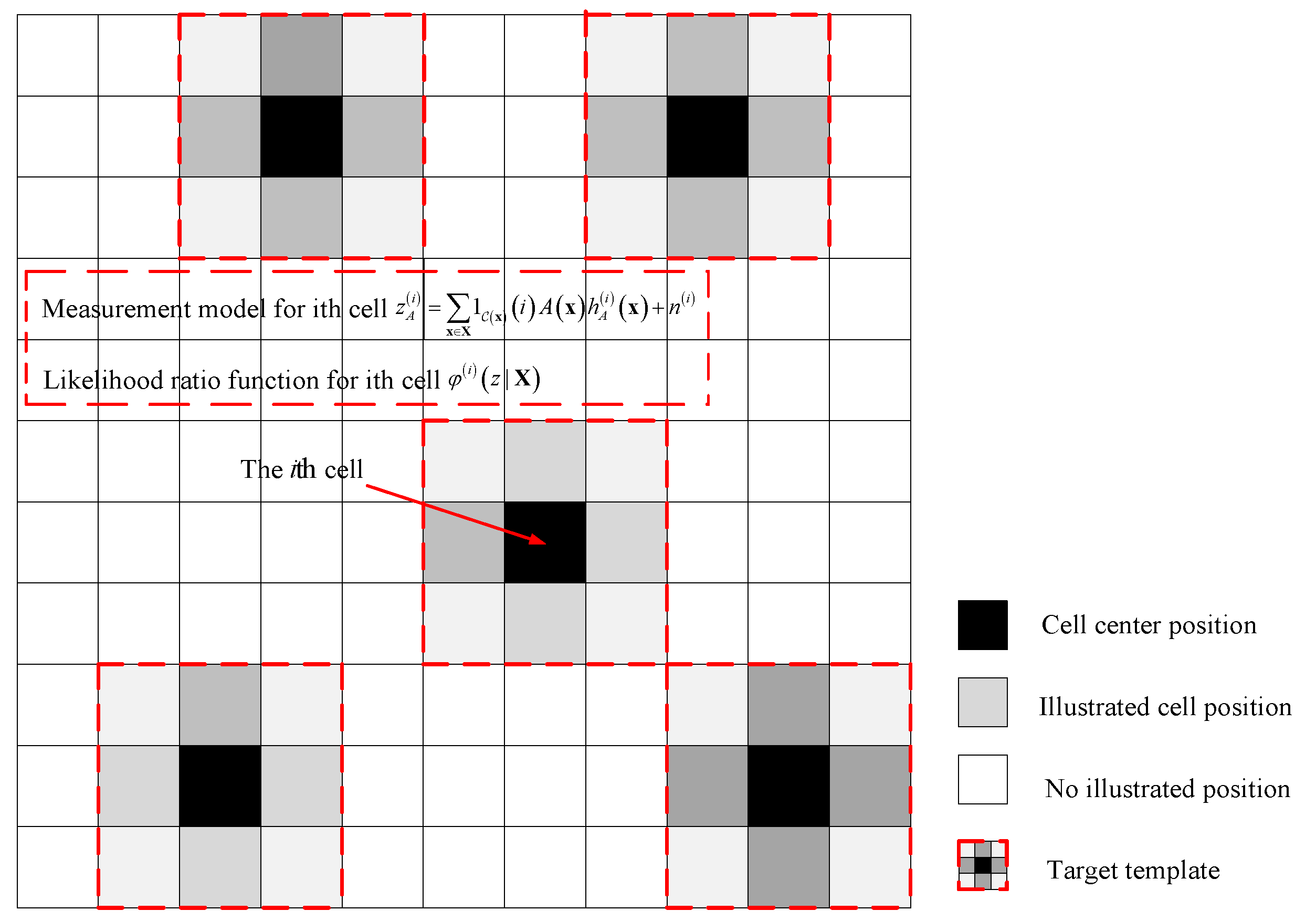
2.1. Likelihood Function Based on Pixel TBD Measurement Model
2.2. Generalized Labeled Multi-Bernoulli Filter Based on TBD Model
3. Efficient Implementation of the GLMB-TBD Filter Using Belief Propagation
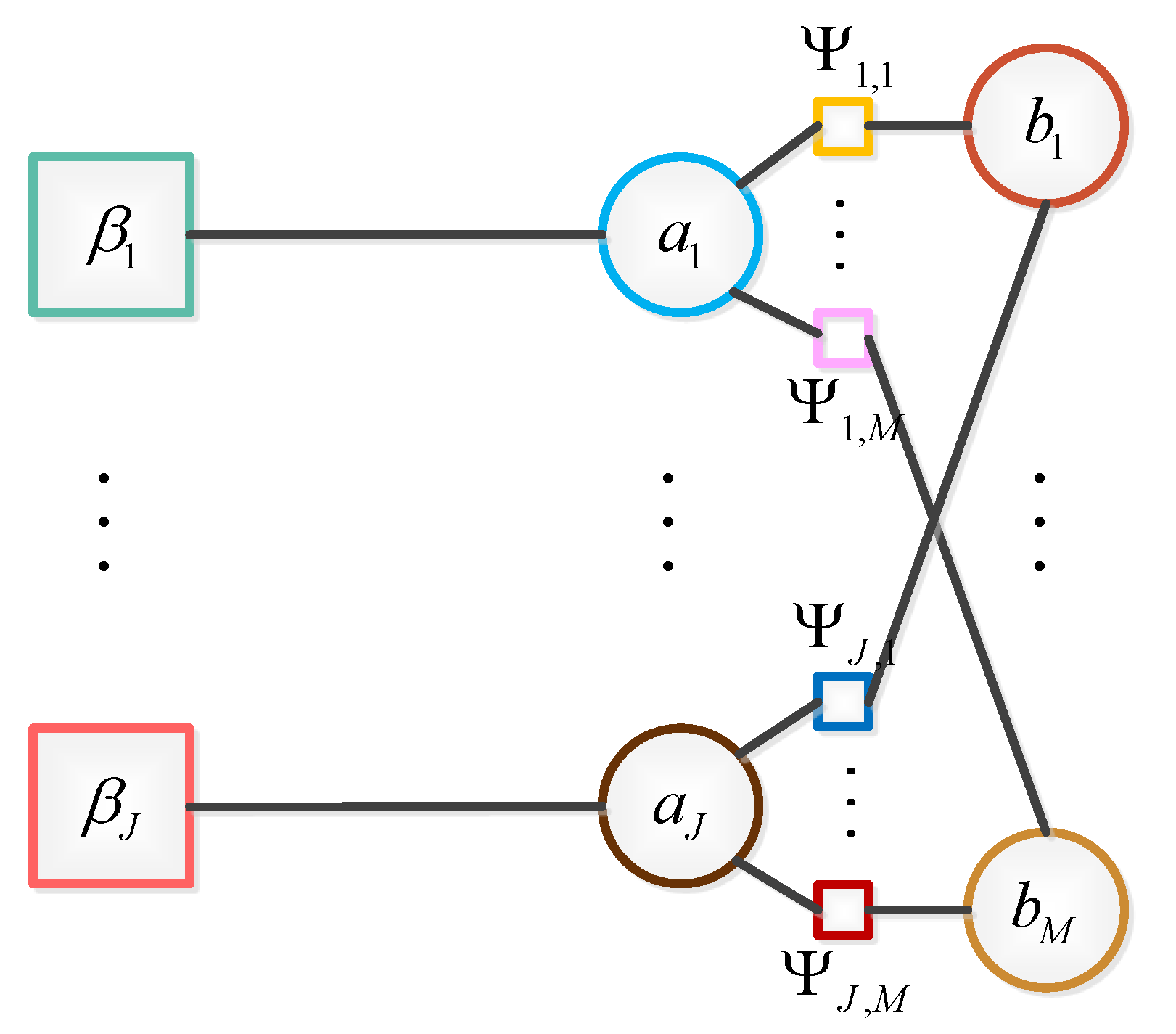
3.1. GLMB-TBD Filter Based on Belief Propagation Algorithm
| Algorithm 1: The GLMB-TBD filter based on belief propagation algorithm |
| Input: The initial birth density of the LMB form at time |
| Output: The multi-target tracks for each time |
| For do |
| Calculate for as with given in |
| (18) and for as , respectively |
| Calculate the spatial probability density for |
| according to (19) |
| End for |
| Initialize For do |
| Calculate according to (39) |
| Calculate according to (40) |
| End for |
| Calculate the approximate marginal association probabilities and |
| according to (41) and (42), respectively |
| Calculate the update existence probabilities and spatial probability densities |
| for according to (43) and (44), respectively |
| Calculate the GLMB posterior density according to (46) and (47) |
| Estimate the cardinality distribution and multi-target state using the maximum a posterior method |
3.2. Complexity Analysis
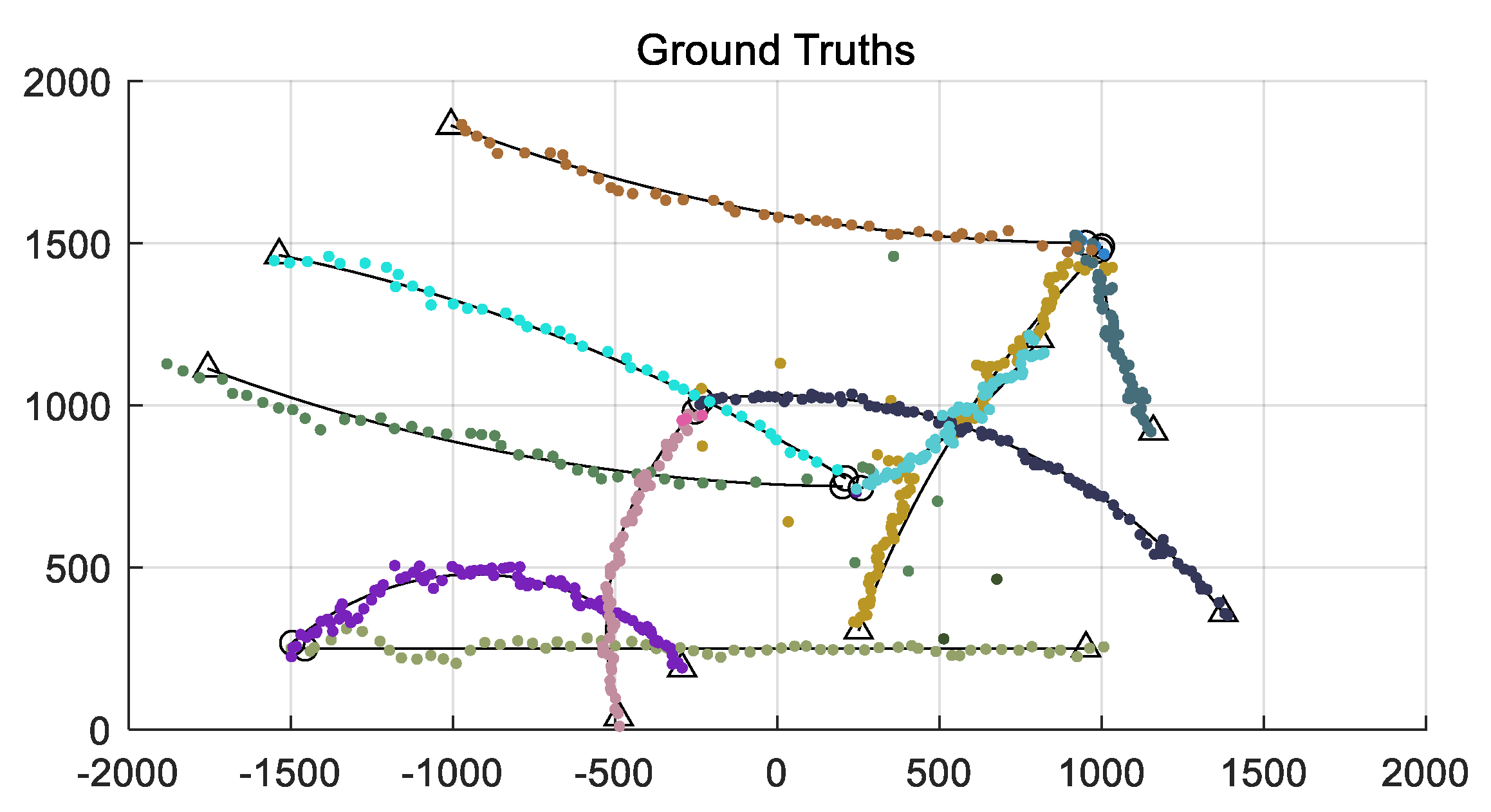
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhu, Y.; Wang, J.; Liang, S. Efficient joint probabilistic data association filter based on Kullback-Leibler divergence for multi-target tracking. IET Radar Sonar Navig. 2017, 11, 1540–1548. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple hypothesis tracking for multiple target tracking. IEEE Trans. Aerosp. Electron. Syst. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Li, C.; Wang, W.; Kirubarajan, T.; Sun, J.; Lei, P. PHD and CPHD filtering with unknown detection probability. IEEE Trans. Signal Process. 2018, 66, 3784–3798. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N.; Cantoni, A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Jones, B.A. CPHD filter birth modeling using the probabilistic admissible region. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1456–1469. [Google Scholar] [CrossRef]
- Mahler, R.P.S.; Vo, B.-T.; Vo, B.-N. CPHD filter with unknown clutter rate and detection profile. IEEE Trans. Signal Process. 2011, 59, 3497–3513. [Google Scholar] [CrossRef]
- Bryant, D.S.; Delande, E.D.; Gehly, S.; Houssineau, J.; Clark, D.E.; Jones, B.A. The CPHD filter with target spawning. IEEE Trans. Signal Process. 2017, 65, 13124–13138. [Google Scholar] [CrossRef]
- Nguyen, T.T.D.; Vo, B.-N.; Vo, B.-T.; Kim, D.Y.; Choi, Y.S. Tracking Cells and Their Lineages Via Labeled Random Finite Sets. IEEE Trans. Signal Process. 2021, 69, 5611–5626. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N. Labeled Random Finite Sets and Multi-Objects Conjugate Priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Bryant, D.S.; Vo, B.-T.; Vo, B.-N.; Jones, B.A. A generalized labeled multi-Bernoulli filter with object spawning. IEEE Trans. Signal Process. 2018, 66, 6177–6189. [Google Scholar] [CrossRef] [Green Version]
- Vo, B.-N.; Vo, B.-T.; Phung, D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef]
- Reuter, S.; Vo, B.-T.; Vo, B.-N.; Dietmayer, K. The labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Yi, W.; Jiang, M.; Hoseinnezhad, R. The multiple model Vo-Vo filter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1045–1054. [Google Scholar] [CrossRef]
- Punchihewa, Y.G.; Vo, B.-T.; Vo, B.-N.; Kim, D.Y. Multiple object tracking in unknown backgrounds with labeled random finite sets. IEEE Trans. Signal Process. 2018, 66, 3040–3055. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Pham, N.-T.; Suter, D. Joint detection and estimation of multiple objects from image observations. IEEE Trans. Signal Process. 2010, 58, 5129–5141. [Google Scholar] [CrossRef]
- Chai, L.; Kong, L.; Li, S.; Yi, W. The multiple model multi-Bernoulli filter based track-before-detect using a likelihood based adaptive birth distribution. Signal Process. 2020, 171, 1–11. [Google Scholar] [CrossRef]
- Papi, F.; Vo, B.-N.; Vo, B.-T.; Fantacci, C.; Beard, M. Generalized Labeled Multi-Bernoulli Approximation of Multi-Object Densities. IEEE Trans. Signal Process. 2015, 63, 5487–5497. [Google Scholar] [CrossRef]
- Li, S.; Yi, W.; Hoseinnezhad, R.; Wang, B.; Kong, L. Multi-object Tracking for Generic Observation Model Using Labeled Random Finite Sets. IEEE Trans. Signal Process. 2018, 66, 368–383. [Google Scholar] [CrossRef]
- Papi, F.; Kin, D.T. A Particle Multi-Target Tracker for Superpositional Measurements Using Labeled Random Finite Sets. IEEE Trans. Signal Process. 2015, 63, 4348–4358. [Google Scholar] [CrossRef]
- Cao, C.; Zhao, Y. An efficient implementation of the multiple-model generalized labeled multi-Bernoulli filter for track-before-detect of point targets using an image sensor. IEEE Trans. Aerosp. Electron. Syst. 2021, 57(6), 4416–4432. [Google Scholar] [CrossRef]
- Yi, W.; Fang, Z.; Li, W.; Hoseinnezhad, R.; Kong, L. Multi-Frame Track-Before-Detect Algorithm for Maneuvering Target Tracking. IEEE Trans. Veh. Technol. 2020, 69, 4104–4118. [Google Scholar] [CrossRef]
- Williams, J.; Lau, R. Approximate evaluation of marginal association probabilities with belief propagation. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2942–2959. [Google Scholar] [CrossRef]
- Kropfreiter, T.; Meyer, F.; Hlawatsch, F. A fast labeled multi-Bernoulli using belief propagation. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2478–2488. [Google Scholar] [CrossRef]
- Soldi, G.; Meyer, F.; Braca, P.; Hlawatsch, F. Self-tuning algorithm for multisensor-multitarget tracking using belief propagation. IEEE Trans. Signal Process. 2019, 67, 3922–3937. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Hoang, H.G. An Efficient Implementation of the Generalized Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2017, 65, 1975–1987. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.-T.; Vo, B.-N. Bayesian multi-target tracking with merged measurements using labeled random finite sets. IEEE Trans. Signal Process. 2015, 63, 1433–1447. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.-T.; Vo, B.-N. A solution for large-scale multi-object tracking. IEEE Trans. Signal Process. 2020, 68, 2754–2769. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T. A multi-scan labeled random finite set model for multi-object state estimation. IEEE Trans. Signal Process. 2019, 67, 4948–4963. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Beard, M. Multi-sensor multi-object tracking with the generalized labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2019, 67, 5952–5967. [Google Scholar] [CrossRef]
- Yi, W.; Chai, L. Heterogeneous multi-sensor fusion with random finite set multi-object densities. IEEE Trans. Signal Process. 2021, 69, 3399–3414. [Google Scholar] [CrossRef]
- Wang, B.; Li, S.; Battistelli, G. Multi-agent fusion with different limited-fields-of-view. IEEE Trans. Signal Process. 2022, 70, 1560–1575. [Google Scholar] [CrossRef]
- Nguyen, H.V.; Rezatofighi, H.; Vo, B.-N.; Ranasinghe, D.C. Distributed multi-object tracking under limited field of view sensors. IEEE Trans. Signal Process. 2021, 69, 5329–5344. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tested Algorithm | Complexity |
|---|---|
| Murty algorithm-based version | |
| Gibbs-based version | |
| BP-based version |
| Parameter | Symbol | Value |
|---|---|---|
| Sampling period | ||
| Iterative time | ||
| Loss coefficient | ||
| Amplitude fluctuation | ||
| Signa-to-noise ratio | SNR | 7 dB |
| 1st Birth target state | ||
| 2nd Birth target state | ||
| 3rd Birth target state | ||
| 4th Birth target state | ||
| Birth covariance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, C.; Zhao, Y. A Generalized Labeled Multi-Bernoulli Filter Based on Track-before-Detect Measurement Model for Multiple-Weak-Target State Estimate Using Belief Propagation. Remote Sens. 2022, 14, 4209. https://doi.org/10.3390/rs14174209
Cao C, Zhao Y. A Generalized Labeled Multi-Bernoulli Filter Based on Track-before-Detect Measurement Model for Multiple-Weak-Target State Estimate Using Belief Propagation. Remote Sensing. 2022; 14(17):4209. https://doi.org/10.3390/rs14174209
Chicago/Turabian StyleCao, Chenghu, and Yongbo Zhao. 2022. "A Generalized Labeled Multi-Bernoulli Filter Based on Track-before-Detect Measurement Model for Multiple-Weak-Target State Estimate Using Belief Propagation" Remote Sensing 14, no. 17: 4209. https://doi.org/10.3390/rs14174209
APA StyleCao, C., & Zhao, Y. (2022). A Generalized Labeled Multi-Bernoulli Filter Based on Track-before-Detect Measurement Model for Multiple-Weak-Target State Estimate Using Belief Propagation. Remote Sensing, 14(17), 4209. https://doi.org/10.3390/rs14174209