
Increasing the Lateral Resolution of 3D-GPR Datasets through 2D-FFT Interpolation with Application to a Case Study of the Roman Villa of Horta da Torre (Fronteira, Portugal)

 , , , and
, , , and
Abstract
:1. Introduction
1.1. Ground-Penetrating Radar in Archaeologic Exploration
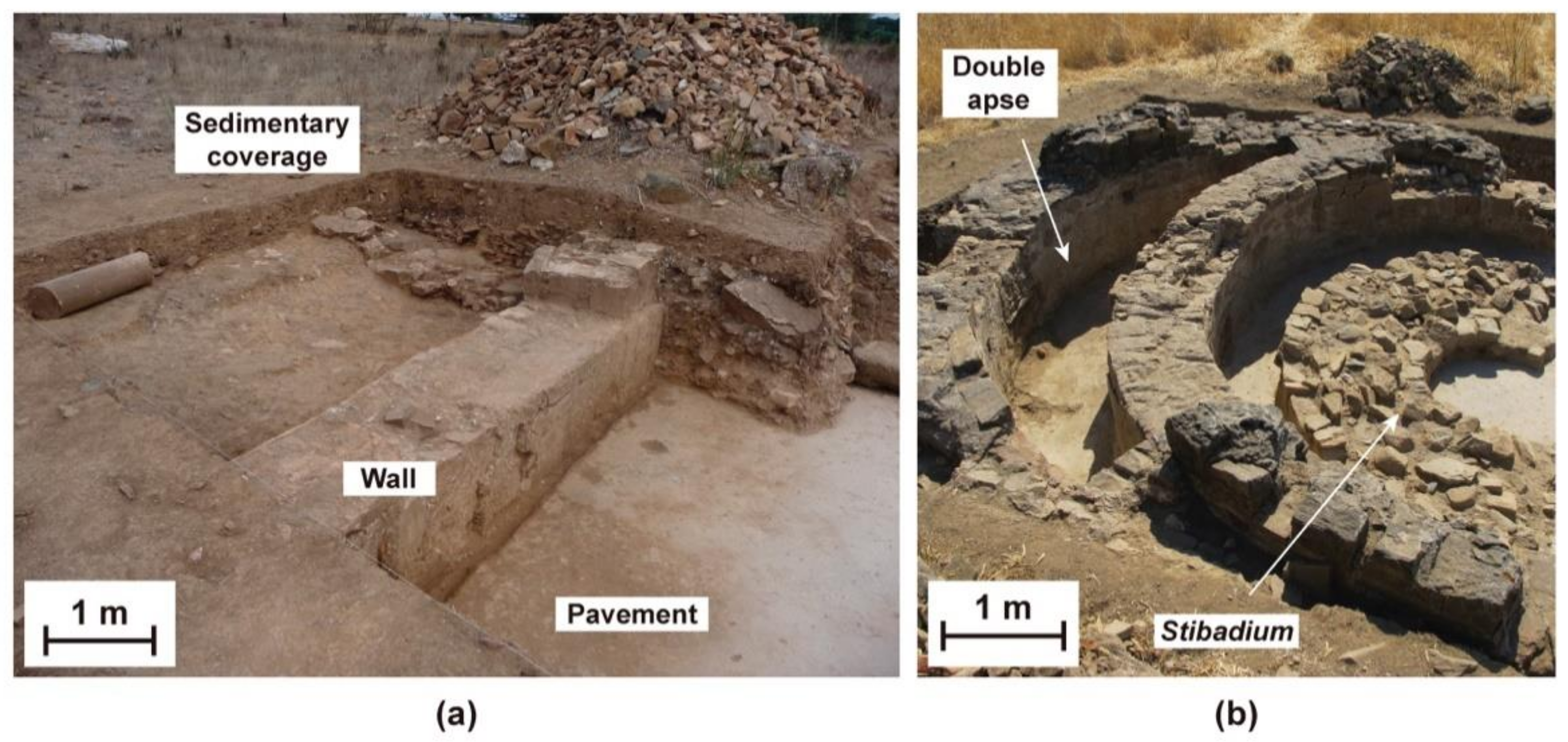
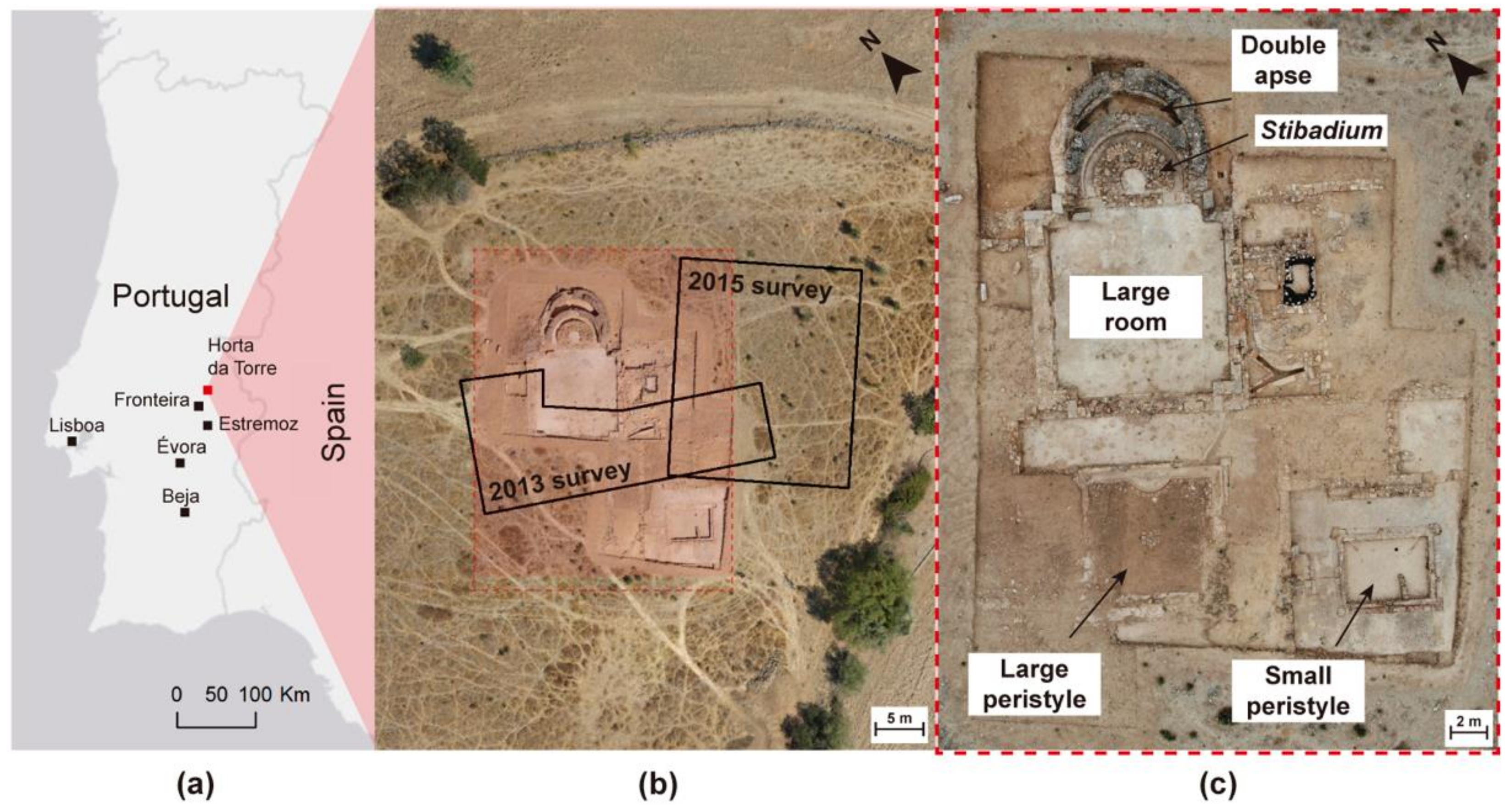
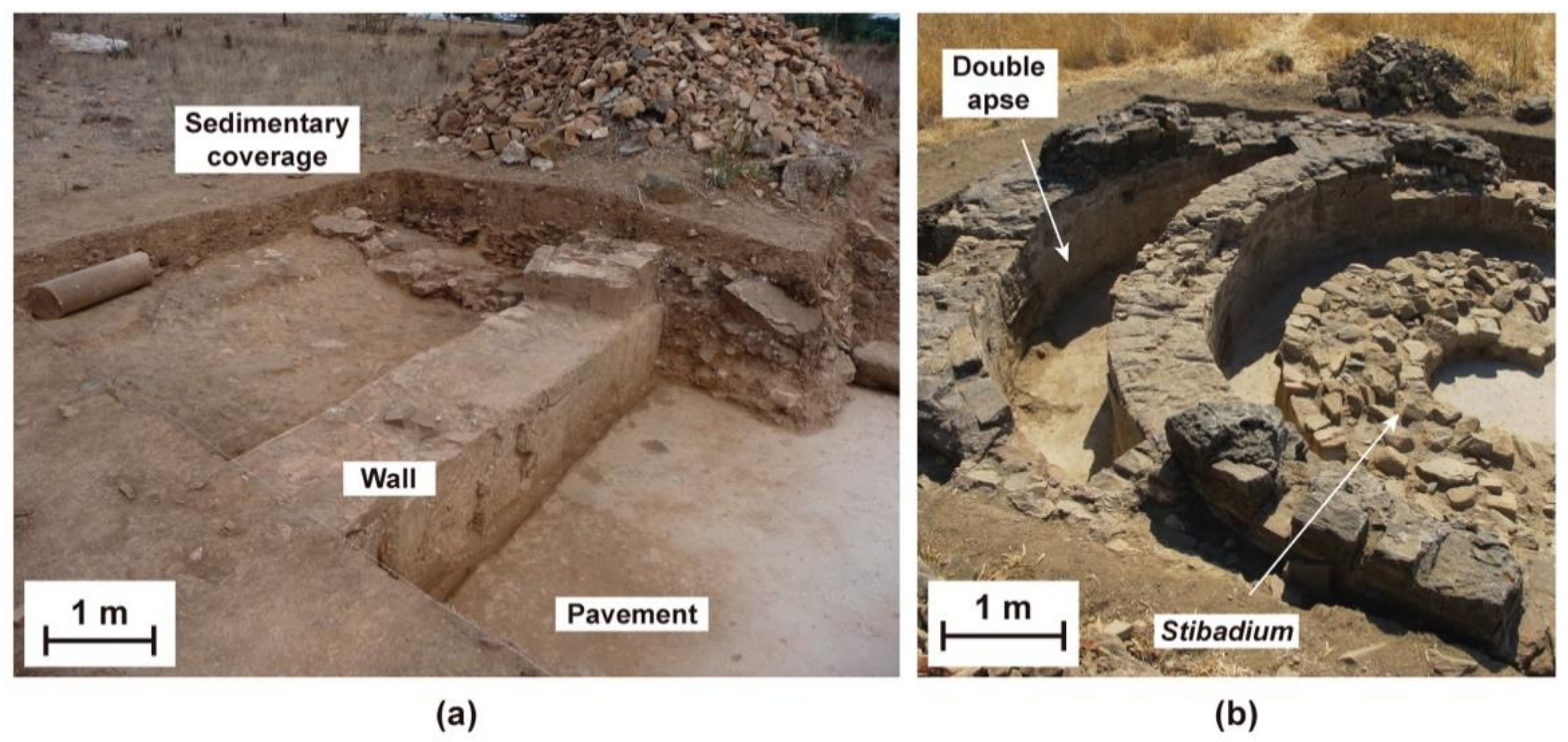
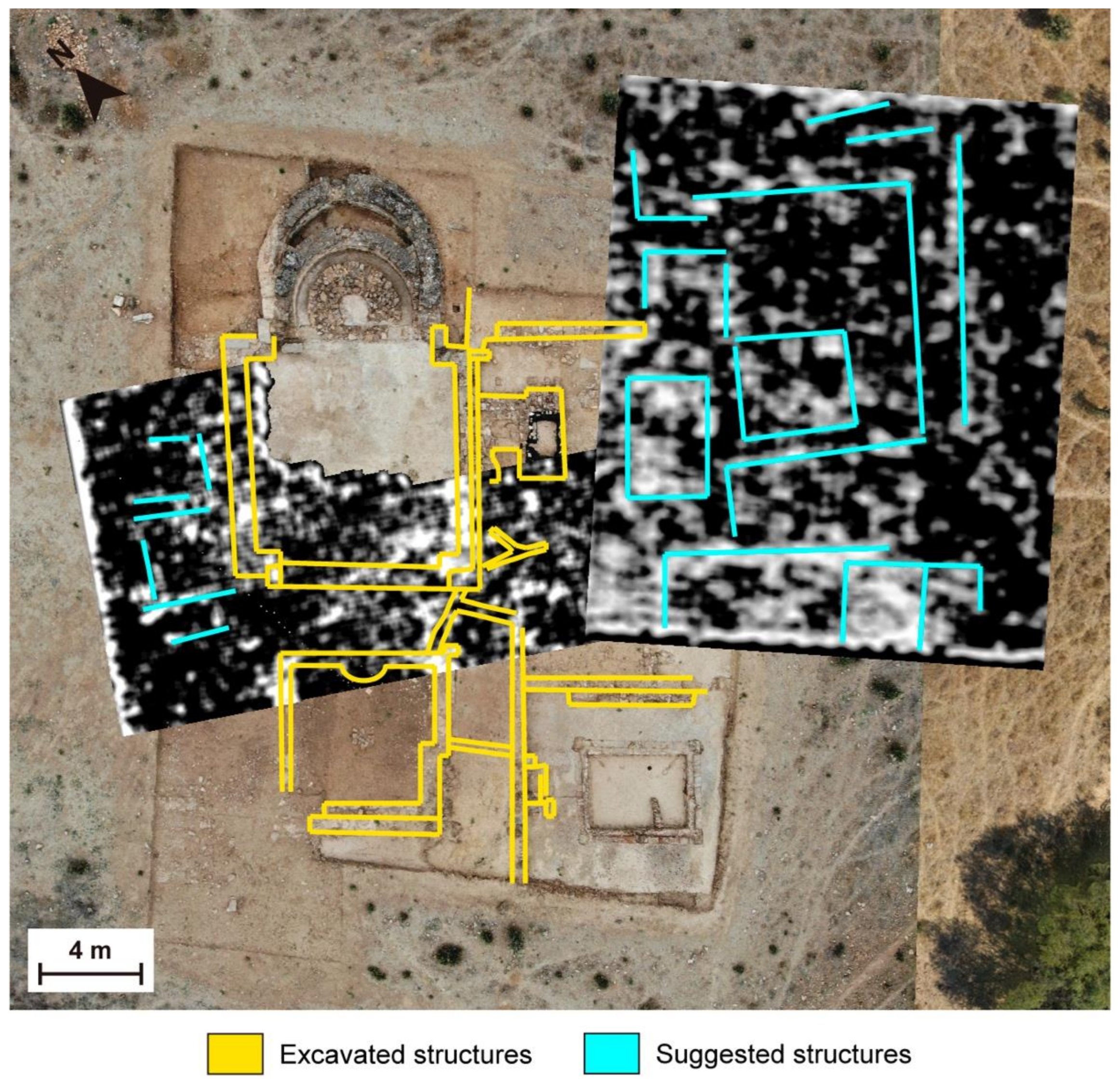
1.2. Archaeological Site: The Roman Villa of Horta da Torre (Fronteira, Portugal)
1.3. GPR Surveys Performed in the Site
2. Densification of 3D-GPR Data with Fourier Interpolation
2.1. General Overview of Trace Generation
2.2. Trace Estimation in Seismic Processing
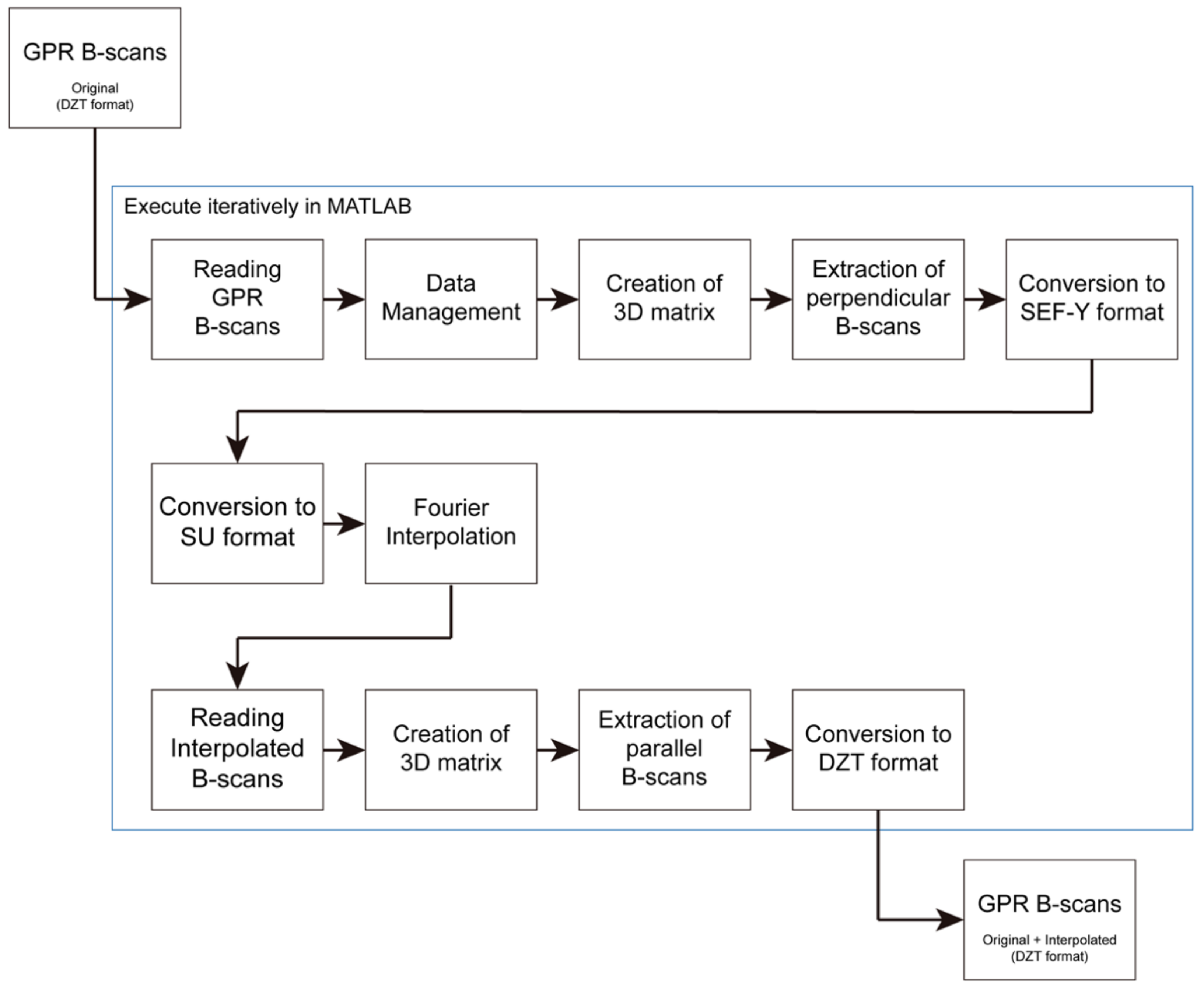
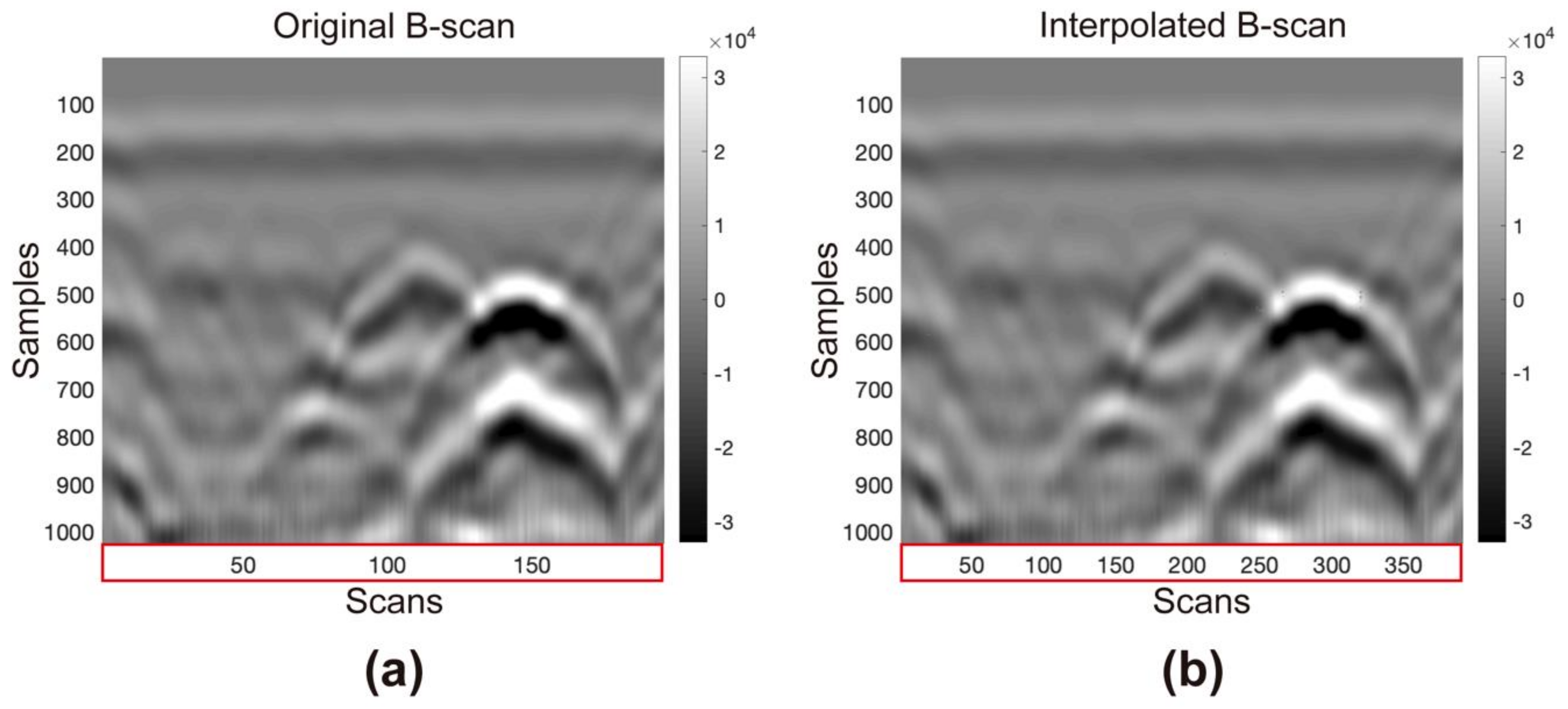
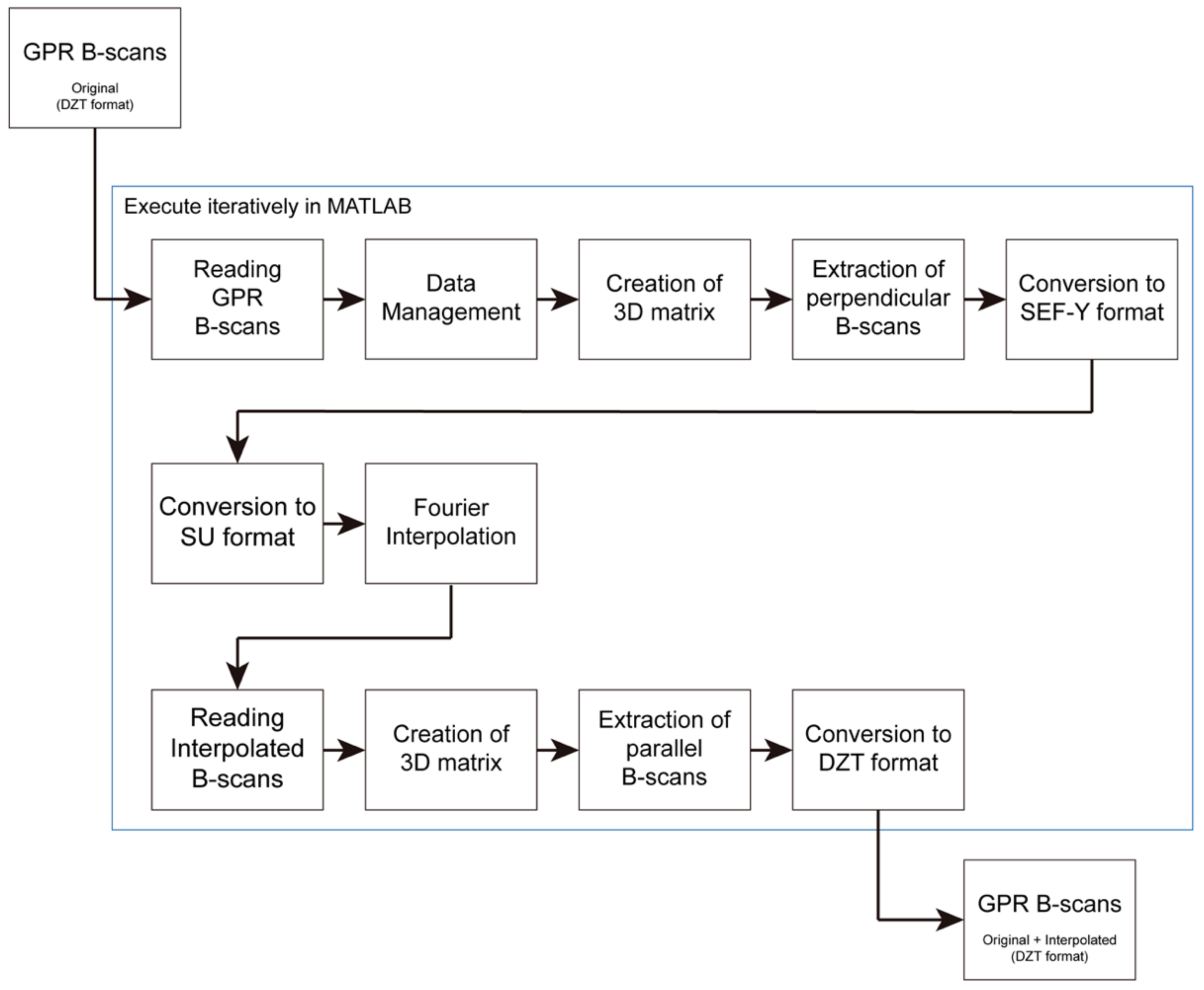
2.3. INT-FFT Algorithm to Interpolate GPR B-Scans
- Preliminary parameterization: introduction of the total number of parallel B-scans and the number of the initial B-scan.
- Importing GPR B-scans in DZT format using routine readgssi, a MATLAB algorithm adapted to read files in DZT format.
- Determination of the maximum length of the B-scans so that the 3D matrix is regular.
- Importing complementary information about the geometry of the dataset (starting and ending position of each B-scan); all B-scans must be well located in space. During the survey, the user needs to collect all the information about the acquisition.
- Determination of the extremes of the locations of each B-scan.
- Removal of the effect of the acquisition in zigzag, if necessary.
- Normalization of the length of the B-scans, if necessary, by adding traces of zeros at the start or end of the B-scan to make the matrix regular.
- Placing the data for each B-scan in the 3D matrix (parallel B-scans).
- Extraction of perpendicular B-scans and conversion to SEG-Y format using the routine MATLAB writesegy (SegyMat Library).
- Conversion to SU format using internal Seismic Unix routines.
- B-scan interpolation using the Seismic Unix Suinterp routine.
- Importing interpolated B-scans in SU format using the MATLAB readsu routine (SegyMat Library).
- Placing the interpolated data in the 3D matrix.
- Extraction of parallel B-scans (original + interpolated).
- Data conversion to DZT format, using the MATLAB writegssi routine, developed to write files in DZT format.
2.4. Parameters to Evaluate the Results
3. Results
3.1. 2013 GPR Dataset
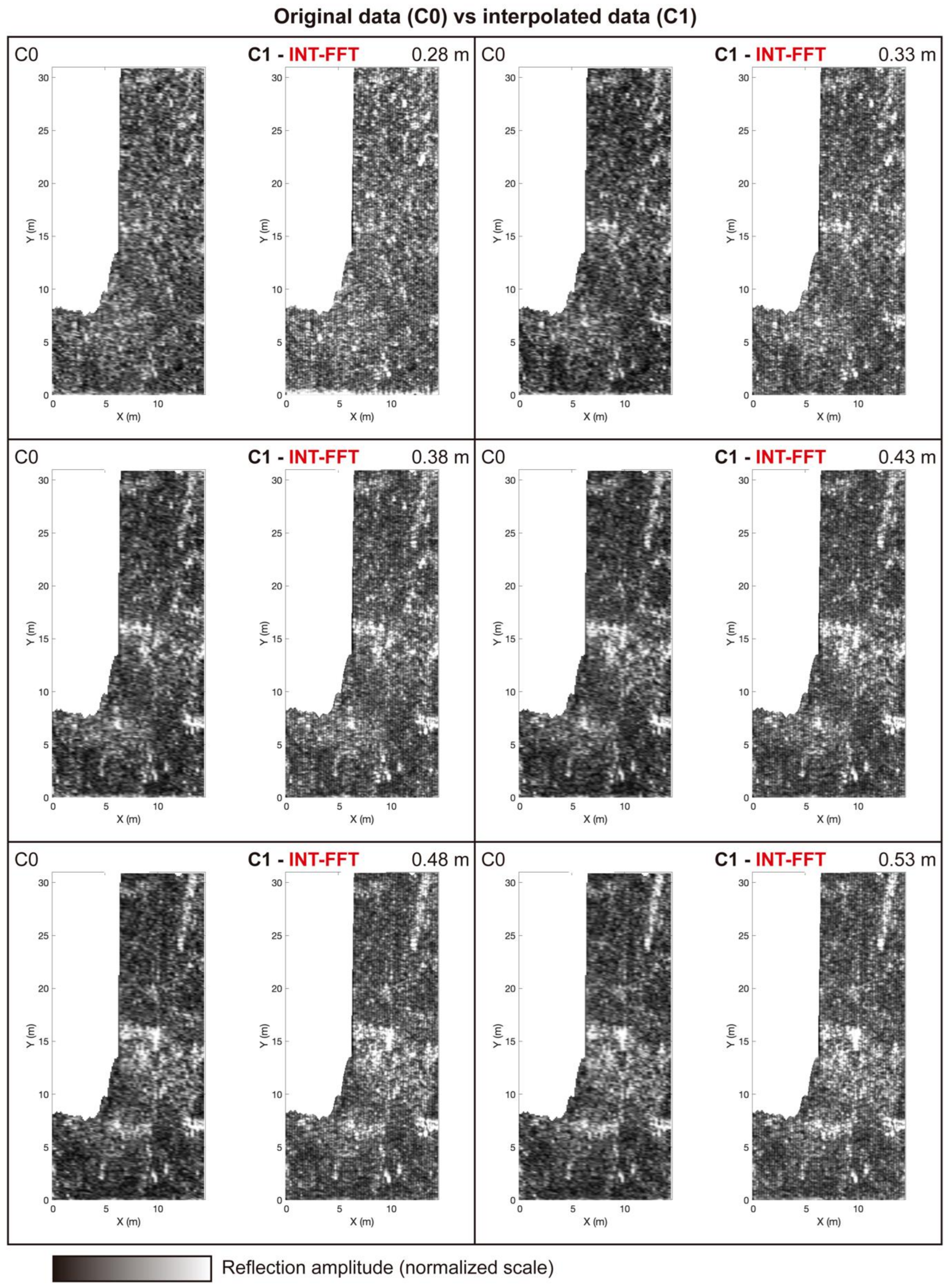
- (1)
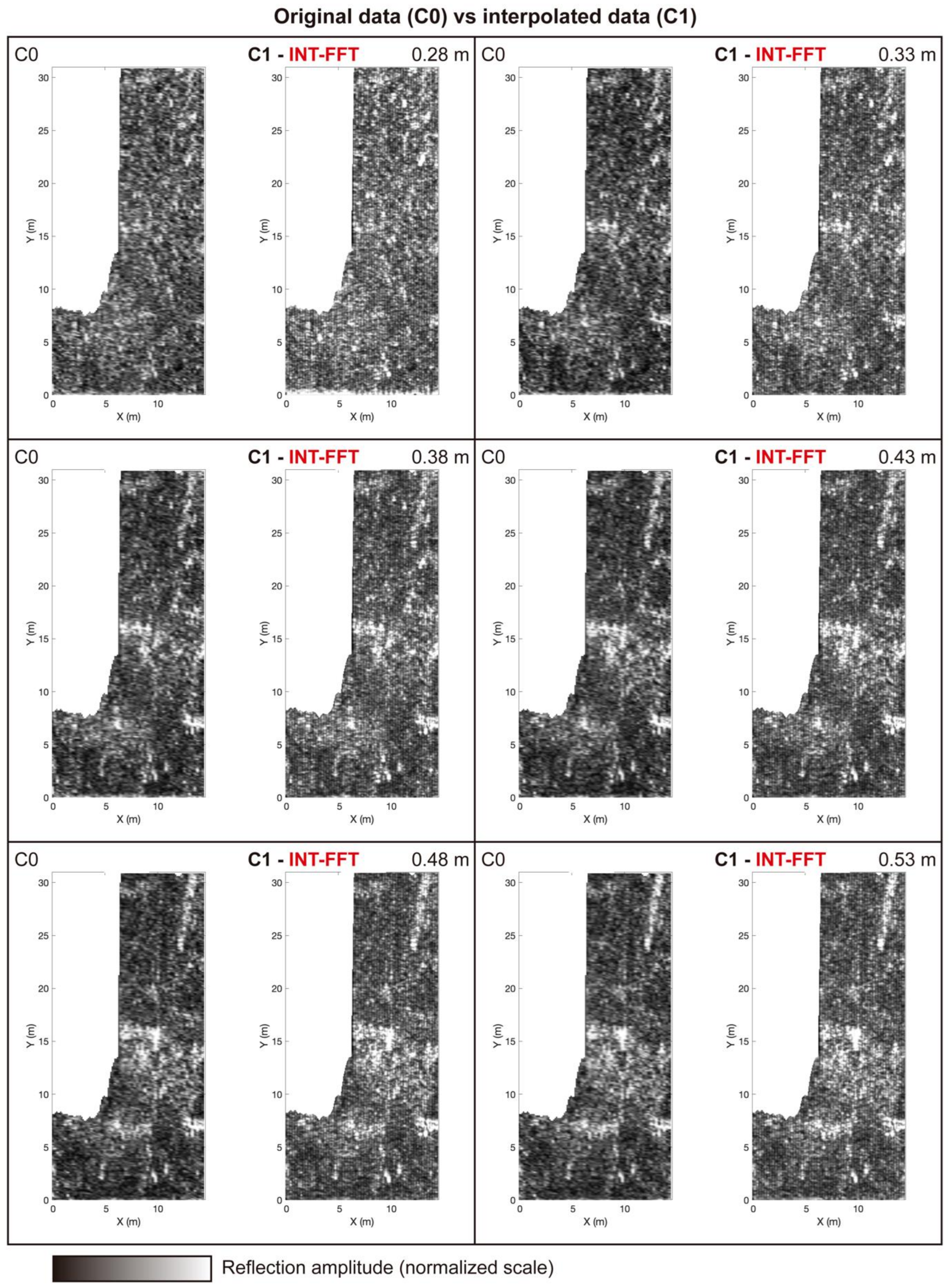
- Original data, C0 (d = 0.250 m) versus interpolated data, C1 (d = 0.125 m): To assess the effects of Fourier interpolation on the lateral densification of GPR B-scans.
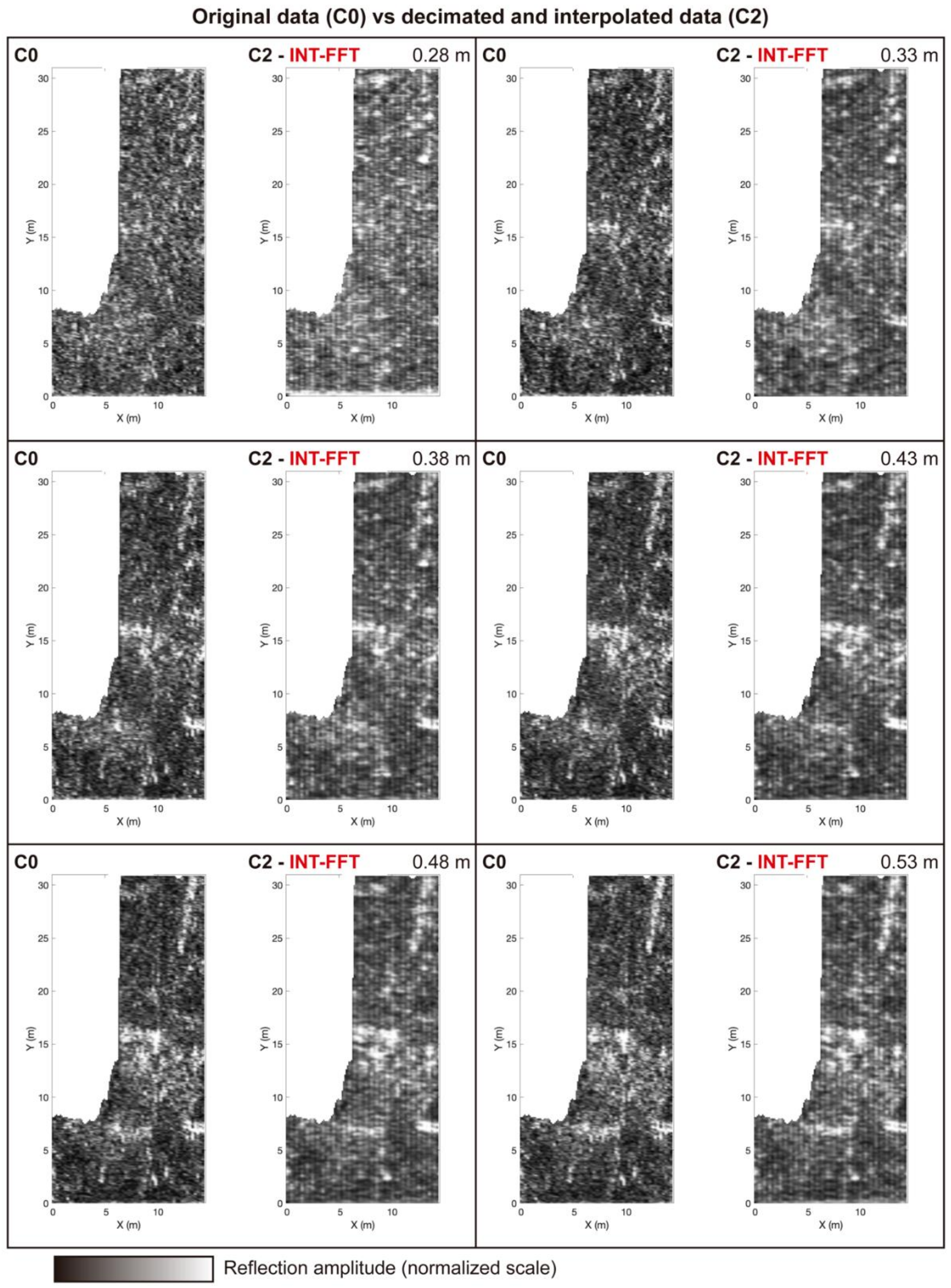
- (2)
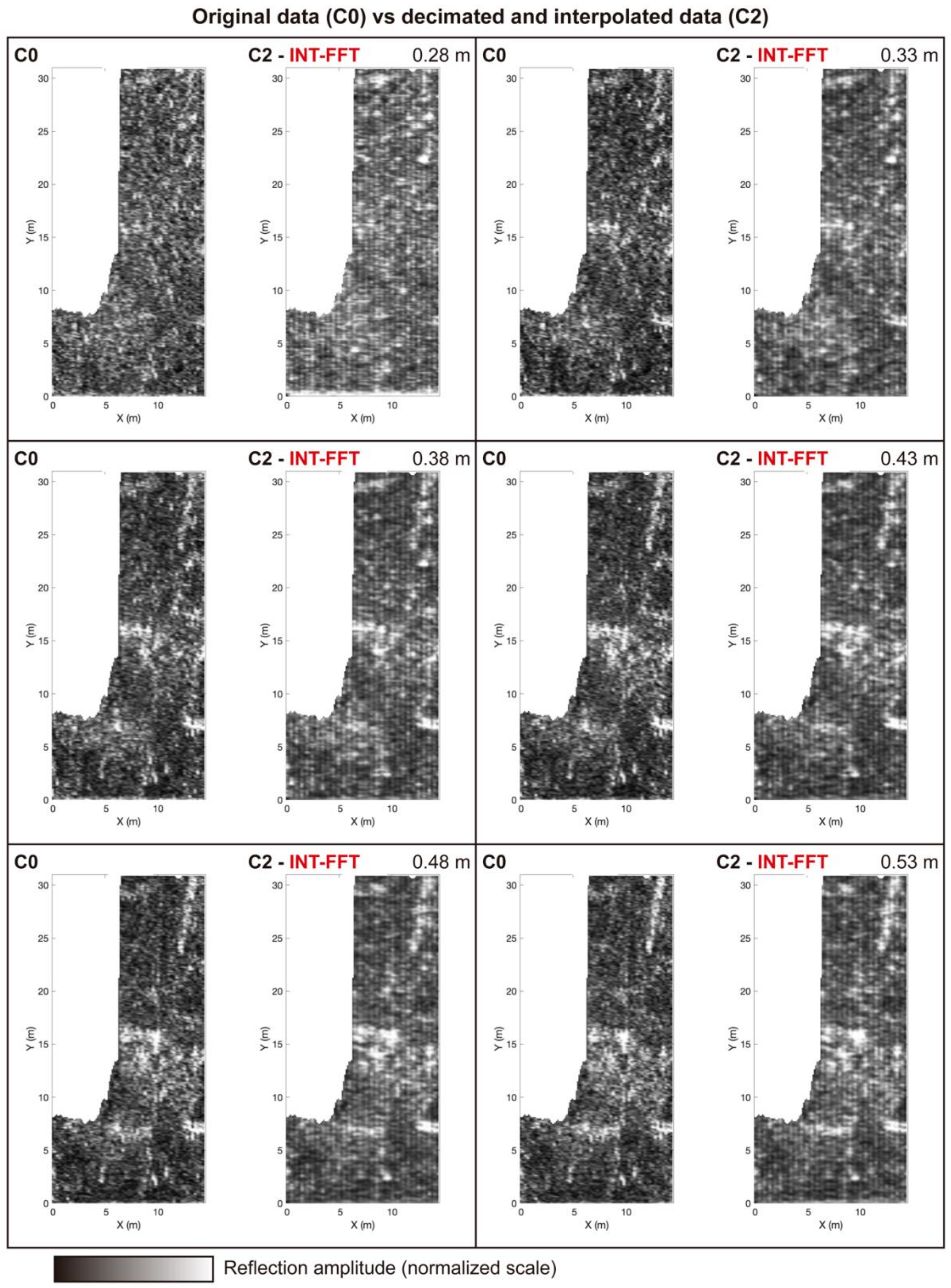
- Original data, C0 (d = 0.250 m) versus decimated and interpolated data, C2 (d = 0.250 m): To assess the level of missing information estimated through Fourier interpolation; for this, we need to decimate the original data with the elimination of B-scans interspersed (between every three, we erase one in the middle) to make the spacing between B-scans at d = 0.500 m; the interpolation resets the original spacing between B-scans (d = 0.250 m).
- (3)
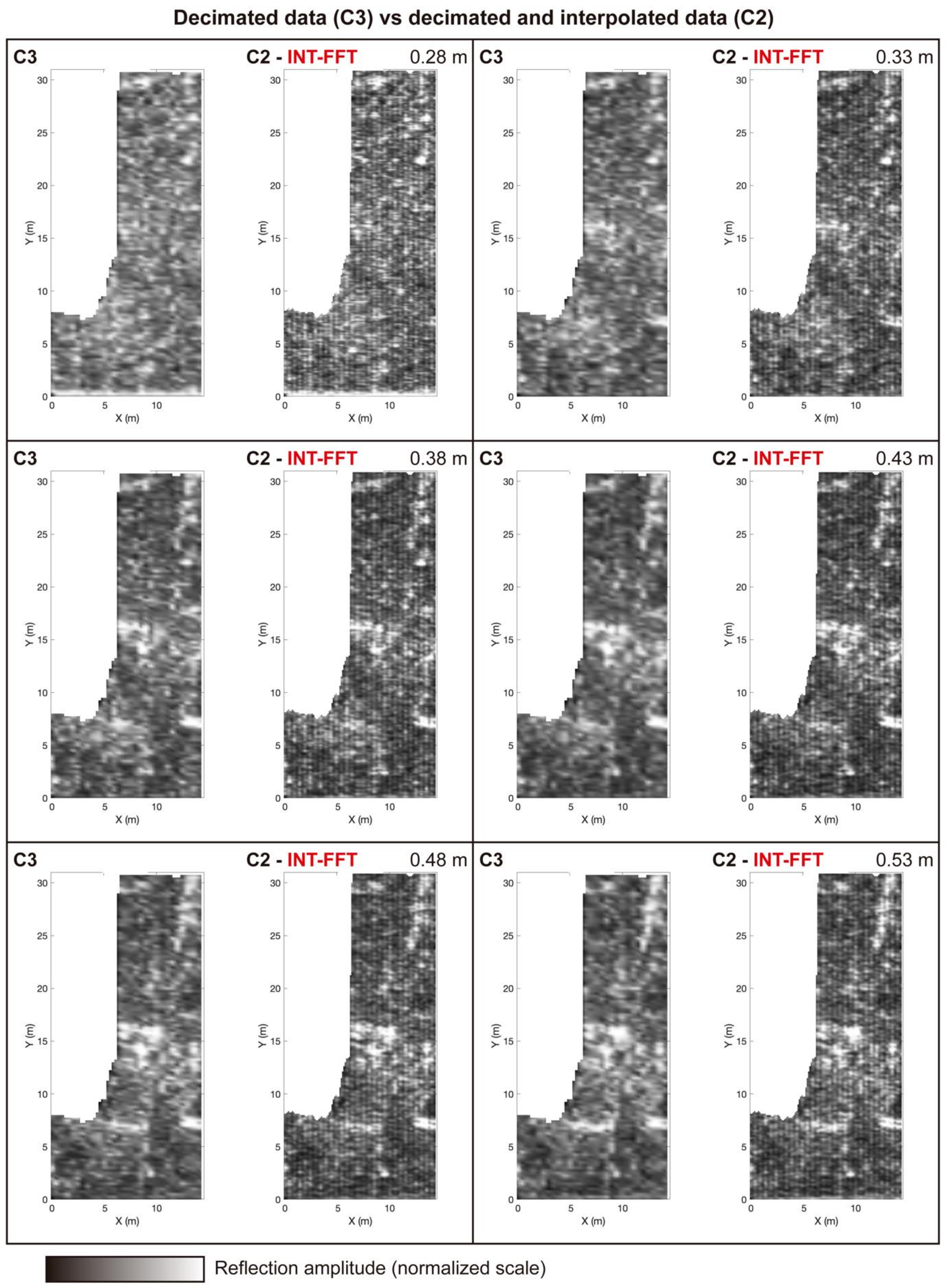
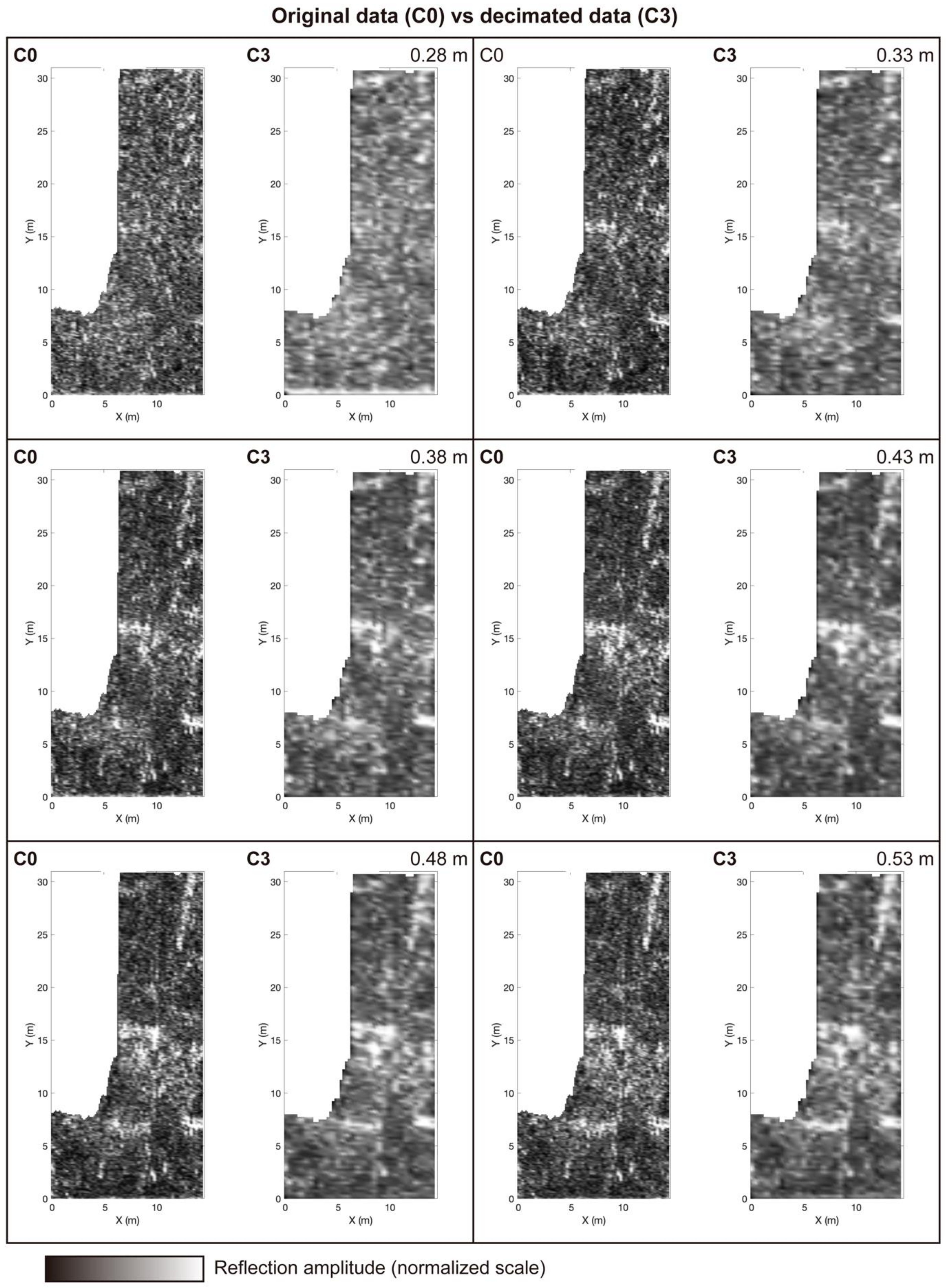
- Original data, C0 (d = 0.250 m) versus decimated data, C3 (d = 0.500 m): To assess what information is lost when we choose to increase the spacing between the B-scans to make the survey faster, which may allow increasing the prospected area.
3.1.1. Original Data (d = 0.250 m)—Default Dataset—C0
3.1.2. Interpolated Data (d = 0.125 m)—C1
3.1.3. Decimated and Interpolated Data (d = 0.250 m)—C2
3.1.4. Decimated Data (d = 0.500 m)—C3
3.2. GPR 2015 Dataset
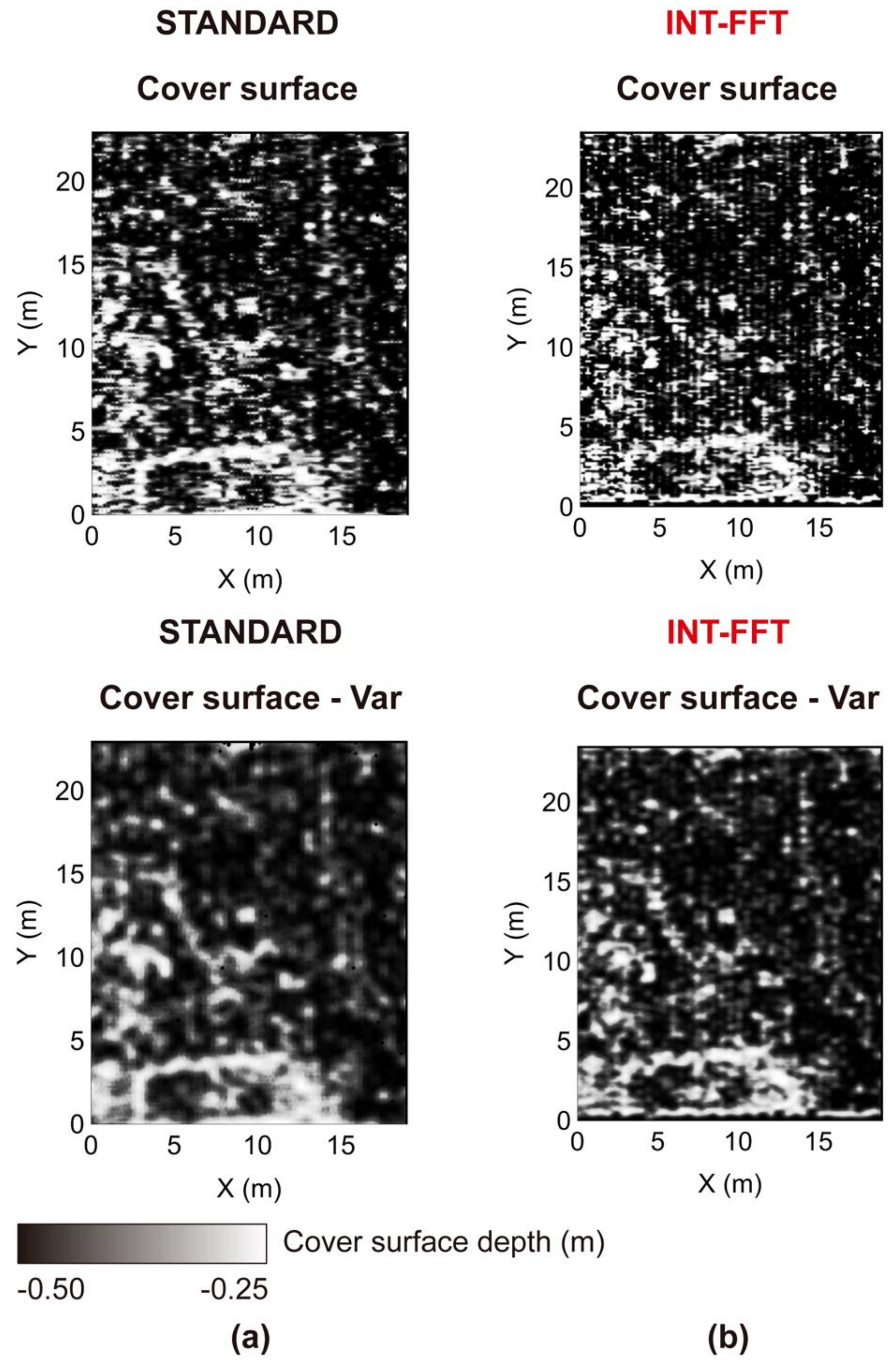
3.3. Interpretation of Geophysical Results in the Scope of the Archaeological Site
4. Discussion of the Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vickers, R.S.; Dolphin, L.T. A Communication on archaeological radar experiment at Chaco Canyon, New Mexico. MASCA Newsl. 1975, 11, 6–8. [Google Scholar]
- Conyers, L.B.; Goodman, D. Ground-Penetrating Radar: An Introduction for Archaeologists; AltaMira Press: Walnut Creek, CA, USA, 1997. [Google Scholar]
- Carneiro, A. Humanitas Supplementum no. 3. In Lugares, Tempos e Pessoas: Povoamento Rural Romano No Alto Alentejo; Imprensa da Universidade de Coimbra: Coimbra, Portugal, 2014. [Google Scholar]
- Peña, J.A.; Teixidó, T. Cover Surfaces As a New Technique for 3D Gpr Image Enhancement. Archaeological Applications. RNM104—Informes. Univ. Granada—Inst. Andal. Geofísica 2013, 1–10. [Google Scholar]
- Liu, W.; Cao, S.; Li, G.; He, Y. Reconstruction of seismic data with missing traces based on local random sampling and curvelet transform. J. Appl. Geophys. 2015, 115, 129–139. [Google Scholar] [CrossRef]
- Gülünay, N. Seismic trace interpolation in the Fourier transform domain. Geophysics 2003, 68, 355–369. [Google Scholar] [CrossRef]
- Liu, B.; Sacchi, M.D. Minimum weighted norm interpolation of seismic records. Geophysics 2004, 69, 1560–1568. [Google Scholar] [CrossRef]
- Spitz, S. Seismic trace interpolation in the FX domain. Geophysics 1991, 56, 785–794. [Google Scholar] [CrossRef]
- Naghizadeh, M. Seismic data interpolation and denoising in the frequency-wavenumber domain. Geophysics 2012, 77, V71–V80. [Google Scholar] [CrossRef]
- Gan, S.; Wang, S.; Chen, Y.; Zhang, Y.; Jin, Z. Dealiased seismic data interpolation using seislet transform with low-frequency constraint. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2150–2154. [Google Scholar]
- Wang, B.; Zhang, N.; Lu, W.; Wang, J. Deep-learning-based seismic data interpolation: A preliminary result. Geophysics 2019, 84, V11–V20. [Google Scholar] [CrossRef]
- Bai, L.S.; Liu, Y.K.; Lu, H.Y.; Wang, Y.B.; Chang, X. Curvelet-domain joint iterative seismic data reconstruction based on compressed sensing. Chin. J. Geophys. 2014, 57, 2937–2945. [Google Scholar]
- Zhang, H.; Chen, X.; Li, H. 3D seismic data reconstruction based on complex-valued curvelet transform in frequency domain. J. Appl. Geophys. 2015, 113, 64–73. [Google Scholar] [CrossRef]
- Kim, B.; Jeong, S.; Byun, J. Trace interpolation for irregularly sampled seismic data using curvelet-transform-based projection onto convex sets algorithm in the frequency–wavenumber domain. J. Appl. Geophys. 2015, 118, 1–14. [Google Scholar] [CrossRef]
- Duijndam, A.J.W.; Schonewille, M.A.; Hindriks, C.O.H. Reconstruction of band-limited signals, irregularly sampled along one spatial direction. Geophysics 1999, 64, 524–538. [Google Scholar] [CrossRef]
- Hindriks, K.; Duijndam, A.J.W. Reconstruction of 3-D seismic signals irregularly sampled along two spatial coordinates. Geophysics 2000, 65, 253–263. [Google Scholar] [CrossRef]
- Sacchi, M.D.; Ulrych, T.J. High-resolution velocity gathers and offset space reconstruction. Geophysics 1995, 60, 1169–1177. [Google Scholar] [CrossRef]
- Trad, D.; Ulrych, T.; Sacchi, M. Latest views of the sparse Radon transform. Geophysics 2003, 68, 386–399. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, Y.; Pham, D.; Lambaré, G. Antileakage Fourier transform for seismic data regularization. Geophysics 2005, 70, V87–V95. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, Y.; Lambaré, G. Antileakage Fourier transform for seismic data regularization in higher dimensions. Geophysics 2010, 75, WB113–WB120. [Google Scholar] [CrossRef]
- Andersson, F.; Morimoto, Y.; Wittsten, J. A variational formulation for interpolation of seismic traces with derivative information. Inverse Probl. 2015, 31, 055002. [Google Scholar] [CrossRef]
- Naghizadeh, M.; Sacchi, M.D. f-x adaptive seismic-trace interpolation. Geophysics 2009, 74, V9–V16. [Google Scholar] [CrossRef]
- Canales, L.L. Random noise reduction. SEG Tech. Program Expand. Abstr. 1984 1984, 525–527. [Google Scholar] [CrossRef]
- Sacchi, M.D.; Kuehl, H. FX ARMA filters. SEG Tech. Program Expand. Abstr. 2000 2000, 2092–2095. [Google Scholar]
- Soubaras, R. Signal-preserving random noise attenuation by the f-x projection. SEG Tech. Program Expand. Abstr. 1994, 1576–1579. [Google Scholar] [CrossRef]
- Abma, R.; Kabir, N. Comparisons of interpolation methods. Lead. Edge 2005, 24, 984–989. [Google Scholar] [CrossRef]
- Naghizadeh, M.; Sacchi, M.D. Multistep autoregressive reconstruction of seismic records. Geophysics 2007, 72, V111–V118. [Google Scholar] [CrossRef]
- Chopra, S.; Marfurt, K.J. Seismic attributes—A historical perspective. Geophysics 2005, 70, 3SO–28SO. [Google Scholar] [CrossRef]
- Dossi, M.; Forte, E.; Pipan, M. Application of attribute-based automated picking to GPR and seismic surveys. GNGTS 2015, 3, 141–147. [Google Scholar]
- Barnes, A.E. Theory of 2-D complex seismic trace analysis. Geophysics 1996, 61, 264–272. [Google Scholar] [CrossRef]
- Barnes, A.E. A tutorial on complex seismic trace analysis. Geophysics 2007, 72, W33–W43. [Google Scholar] [CrossRef]
- Taner, M.T.; Koehler, F.; Sheriff, R.E. Complex seismic trace analysis. Geophysics 1979, 44, 1041–1063. [Google Scholar] [CrossRef]
- Russell, B.; Ribordy, C. New edge detection methods for seismic interpretation. CREWES Res. Rep. 2014, 67, 35–41. [Google Scholar]
- Oliveira, R.J. Prospeção Geofísica Aplicada à Arqueologia. Ph.D. Thesis, Institute of Research and Advanced Training, University of Évora, Évora, Portugal, 2020. [Google Scholar]
- Oliveira, R.J.; Caldeira, B.; Teixidó, T.; Borges, J.F. GPR clutter reflection noise-filtering through singular value decomposition in the bidimensional spectral domain. Remote Sens. 2021, 13, 2005. [Google Scholar] [CrossRef]
- Anderson, J. SUINTERP—Interpolate Traces Using Automatic Event Picking (Seismic Unix Routine—Open Source). Centre for Wave Phenomena; Colorado School of Mines: Golden, CO, USA, 2008. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Paul, S.; Sevcenco, I.S.; Agathoklis, P. Multi-exposure and multi-focus image fusion in gradient domain. J. Circuits Syst. Comput. 2016, 25, 1650123. [Google Scholar] [CrossRef]
- Yang, Y.; Huang, S.; Gao, J.; Qian, Z. Multi-focus image fusion using an effective discrete wavelet transform based algorithm. Meas. Sci. Rev. 2014, 14, 102–108. [Google Scholar] [CrossRef]
- Birdal, T. Sharpness Estimation from Image Gradients. MATLAB Central File Exchange. 2022. Available online: https://www.mathworks.com/matlabcentral/fileexchange/32397-sharpness-estimation-from-image-gradients (accessed on 13 April 2022).
- Matheron, G.; Armstrong, M. Geostatistical Case Studies; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1987. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Parameters | 2013 Survey | 2015 Survey |
|---|---|---|
| Antenna frequency (MHz) | 400 | 400 |
| Number of B-scans | 59 | 39 |
| Distance between B-scans (m) | 0.25 | 0.50 |
| Antenna frequency (MHz) | 400 | 400 |
| Scans per meter | 50 | 40 |
| Samples per trace | 1024 | 1024 |
| Temporal depth (ns) | 100 | 50 |
| IIR band-pass filter (MHz) | 100–800 | 100–800 |
| Processing Operation | 2013 Survey | 2015 Survey |
|---|---|---|
| Correction of the surface position | 5.37 ns | |
| IIR filters | 11 traces | 13 traces |
| Gain adjustment | Constant in time window | |
| Kirchhoff migration | Width 11; velocity 0.04 m/ns | |
| Predictive deconvolution | N = 17; Predictive lag = 3 | |
| FIR filters | 295–580 MHz | |
| Gain adjustment | Linear, 7 points | |
| Hilbert transform | Magnitude | |
| Depth (m) | Structural Similarity Index (%) | ||
|---|---|---|---|
| C0 VS. C1 | C0 VS. C2 | C0 VS. C3 | |
| 0.28 | 81.17 | 62.49 | 62.78 |
| 0.33 | 82.50 | 63.02 | 62.62 |
| 0.38 | 82.44 | 64.98 | 65.49 |
| 0.43 | 82.65 | 64.16 | 65.23 |
| 0.48 | 82.66 | 65.10 | 65.47 |
| 0.53 | 82.62 | 65.17 | 66.87 |
| Mean | 82.34 | 64.15 | 64.74 |
| Depth (m) | Sharpness Index (%) | |||
|---|---|---|---|---|
| C0 | C1 | C2 | C3 | |
| 0.28 | 13.14 | 17.80 | 12.30 | 9.88 |
| 0.33 | 12.13 | 15.79 | 11.09 | 8.99 |
| 0.38 | 11.22 | 14.96 | 10.47 | 8.51 |
| 0.43 | 10.64 | 14.23 | 9.83 | 7.99 |
| 0.48 | 10.93 | 14.43 | 10.08 | 8.18 |
| 0.53 | 10.60 | 14.60 | 10.28 | 8.25 |
| Mean | 11.44 | 15.30 | 10.68 | 8.63 |
| GPR Dataset | Sharpness Index (%) | |
|---|---|---|
| Standard | INT-FFT | |
| 2013 | 13.37 | 26.19 |
| GPR Dataset | Sharpness Index (%) | |
|---|---|---|
| Standard | INT-FFT | |
| 2015 | 21.03 | 27.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliveira, R.J.; Caldeira, B.; Teixidó, T.; Borges, J.F.; Carneiro, A. Increasing the Lateral Resolution of 3D-GPR Datasets through 2D-FFT Interpolation with Application to a Case Study of the Roman Villa of Horta da Torre (Fronteira, Portugal). Remote Sens. 2022, 14, 4069. https://doi.org/10.3390/rs14164069
Oliveira RJ, Caldeira B, Teixidó T, Borges JF, Carneiro A. Increasing the Lateral Resolution of 3D-GPR Datasets through 2D-FFT Interpolation with Application to a Case Study of the Roman Villa of Horta da Torre (Fronteira, Portugal). Remote Sensing. 2022; 14(16):4069. https://doi.org/10.3390/rs14164069
Chicago/Turabian StyleOliveira, Rui Jorge, Bento Caldeira, Teresa Teixidó, José Fernando Borges, and André Carneiro. 2022. "Increasing the Lateral Resolution of 3D-GPR Datasets through 2D-FFT Interpolation with Application to a Case Study of the Roman Villa of Horta da Torre (Fronteira, Portugal)" Remote Sensing 14, no. 16: 4069. https://doi.org/10.3390/rs14164069
APA StyleOliveira, R. J., Caldeira, B., Teixidó, T., Borges, J. F., & Carneiro, A. (2022). Increasing the Lateral Resolution of 3D-GPR Datasets through 2D-FFT Interpolation with Application to a Case Study of the Roman Villa of Horta da Torre (Fronteira, Portugal). Remote Sensing, 14(16), 4069. https://doi.org/10.3390/rs14164069