
Local Scale (3-m) Soil Moisture Mapping Using SMAP and Planet SuperDove


Abstract
:
1. Introduction
2. Study Region and Data Sets
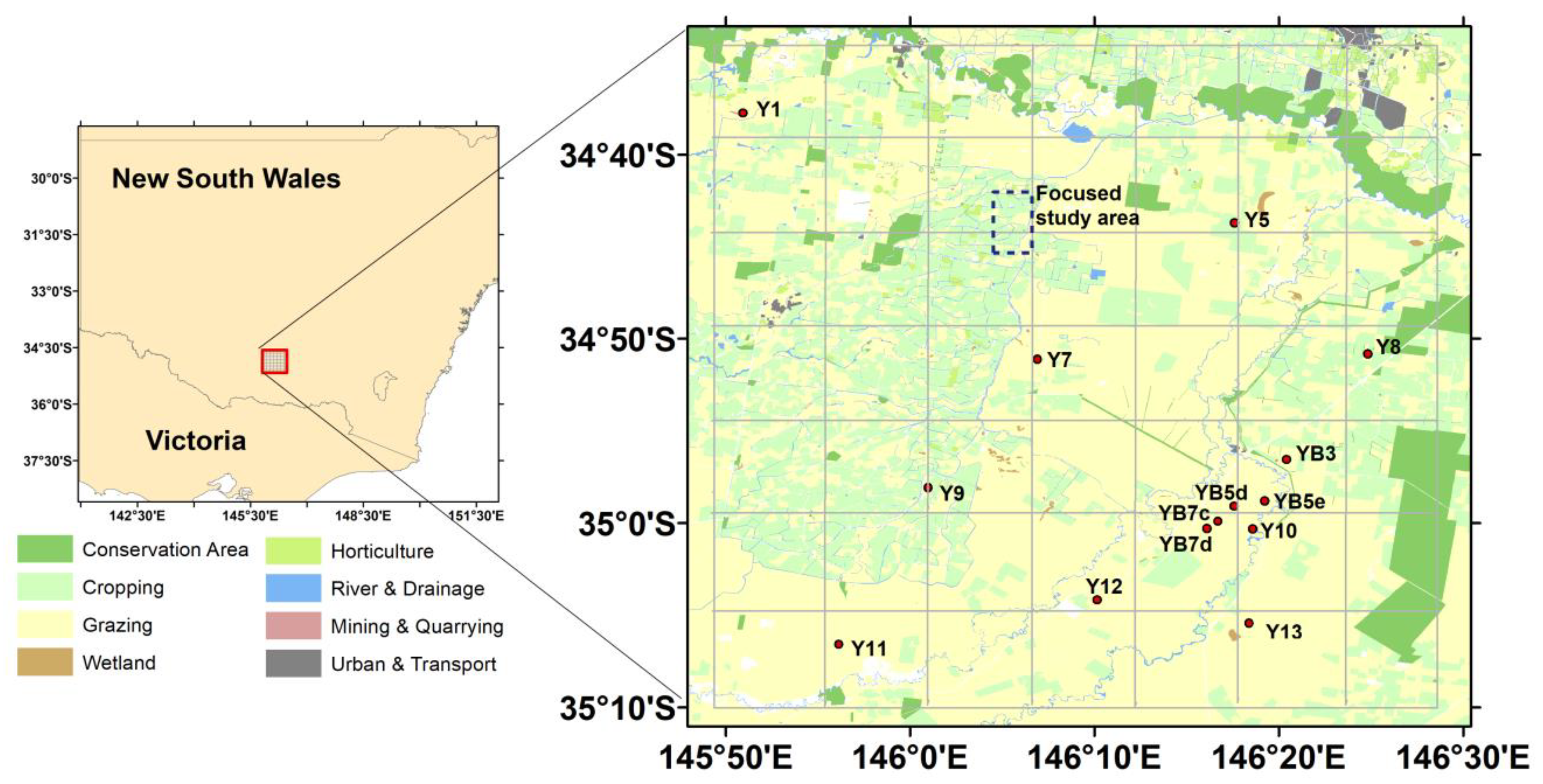
2.1. Study Region
2.2. Data Sets
2.2.1. Yanco Network
2.2.2. Intensive Sampling Using HDAS
2.2.3. PSD 8-Band Imagery
2.2.4. SMAP Soil Moisture
2.2.5. Data Processing Using GEE
3. Methods
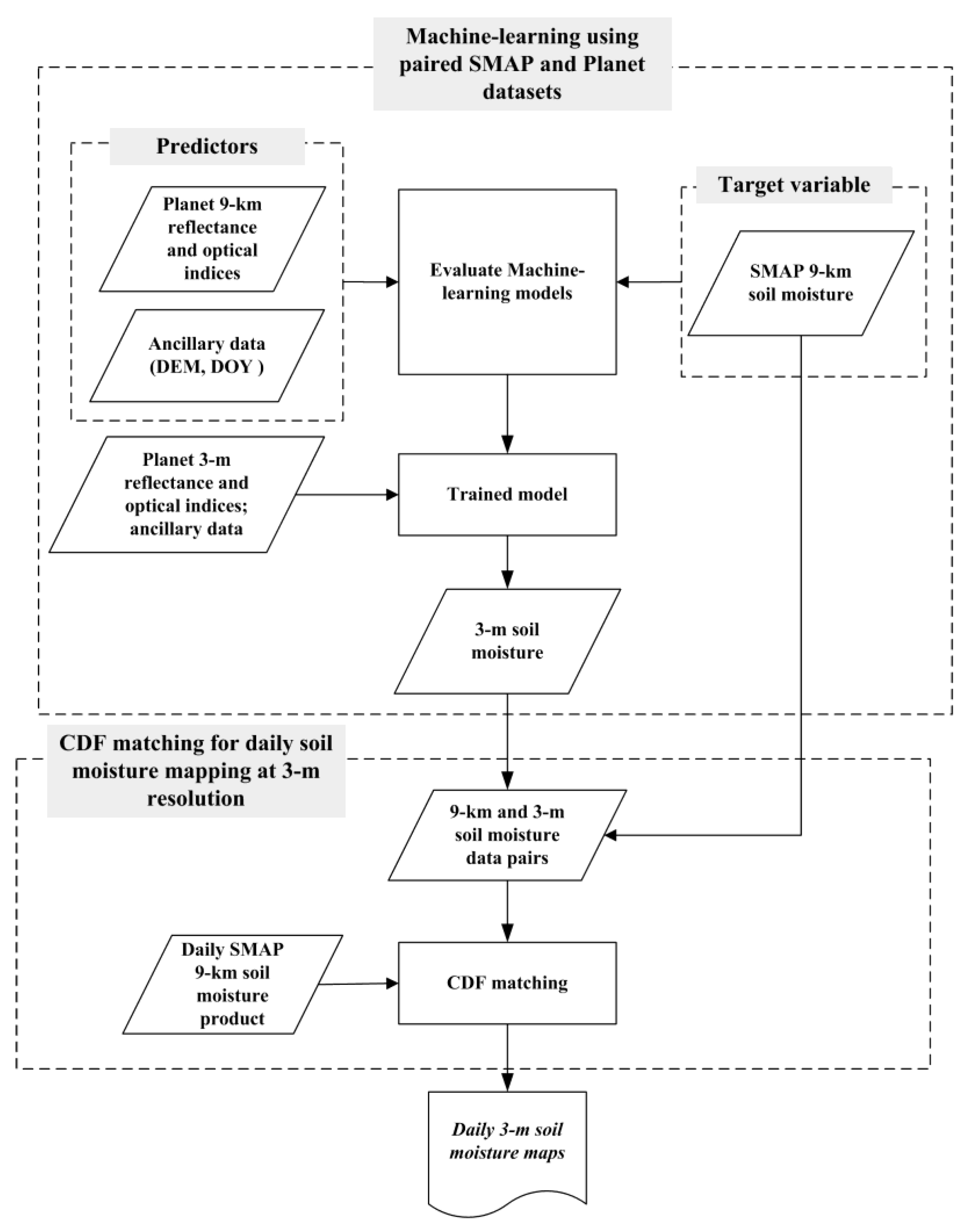
3.1. Approach Overview
- (a)
- Aggregate all predictor variables for 9-km SMAP grid cells and pair with the corresponding SMAP SSM for the same dates using GEE.
- (b)
- Perform region-independent cross-validations for model assessment by dividing the SMAP grid cells into seven rows from north to south (Figure 1), selecting data associated with every six rows for model training, and using data from the remaining row for validation. A total of 2100 SMAP and PSD data pairs were used for the assessment.
- (c)
- Select the best-performing model from the resulting ML algorithms, and apply it to the 3-m PSD data under clear-sky conditions.
- (d)
- For a given 3-m pixel, perform CDF matching for the SSM estimates of the pixel and the associated SMAP values of the overlying 9-km grid cell, and generate 3-m soil moisture estimates using only the SMAP retrievals as model inputs.
3.2. Machine-Learning Methods
3.3. Input Variables Used for ML-Based SSM Prediction
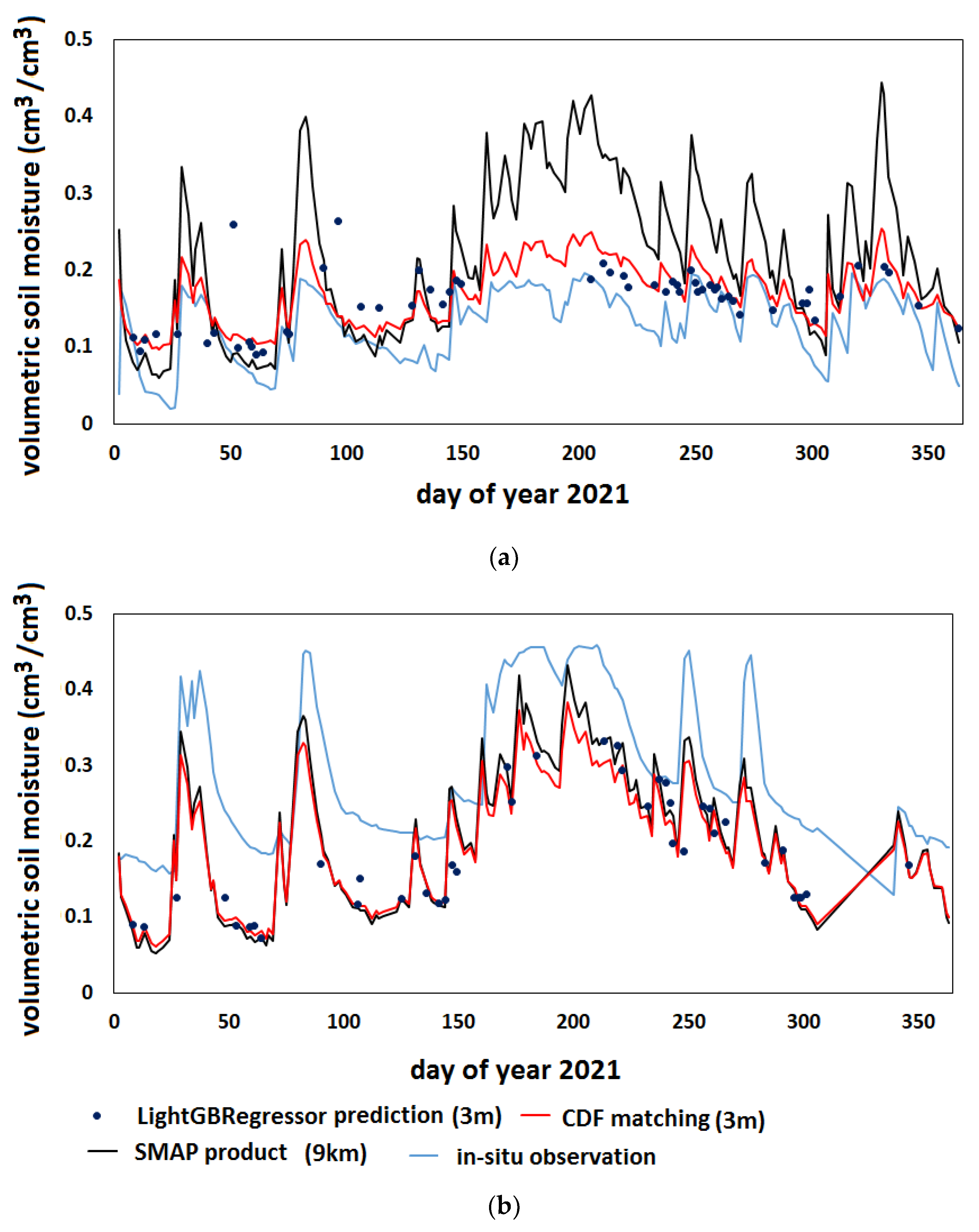
3.4. CDF Matching for Generating Daily SSM Record
3.5. Algorithm Assessment
4. Results
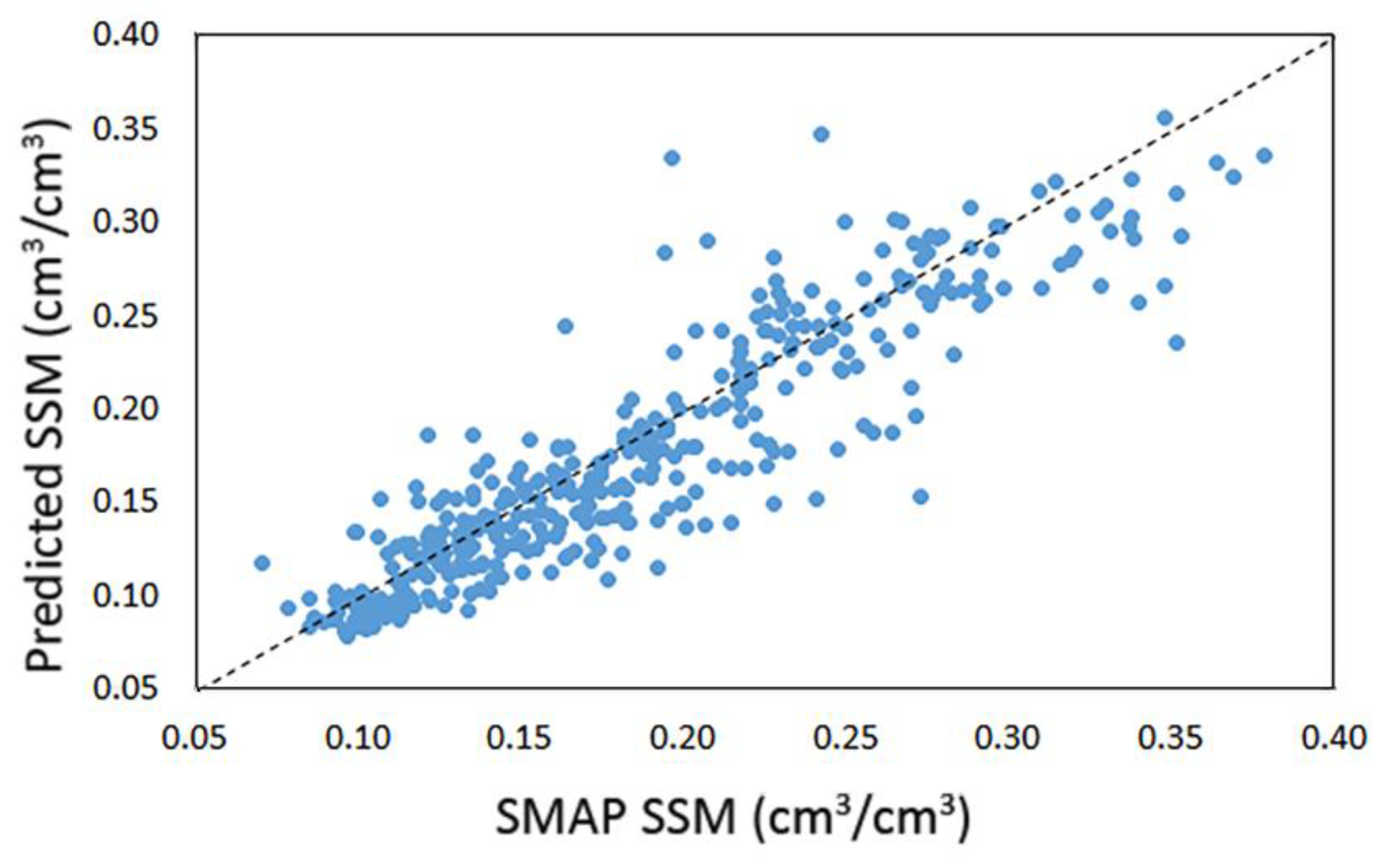
4.1. Assessing the Performance of ML Models in Predicting SSM at 9-km Resolution
4.2. Assessing SSM Predictions at 3-m Resolution
4.3. Evaluating SSM Spatial Distributions at 3-m Resolution
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kimball, J.S.; Jones, L.A.; Zhang, K.; Heinsch, F.A.; McDonald, K.C.; Oechel, W.C. A Satellite Approach to Estimate Land–Atmosphere CO2 Exchange for Boreal and Arctic Biomes Using MODIS and AMSR-E. IEEE Trans. Geosci. Remote Sens. 2008, 47, 569–587. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Bindlish, R.; Crow, W.T.; Jackson, T.J. Role of Passive Microwave Remote Sensing in Improving Flood Forecasts. IEEE Geosci. Remote Sens. Lett. 2008, 6, 112–116. [Google Scholar] [CrossRef]
- Du, J.; Kimball, J.S.; Velicogna, I.; Zhao, M.; Jones, L.A.; Watts, J.D.; Kim, Y. Multicomponent Satellite Assessment of Drought Severity in the Contiguous United States from 2002 to 2017 Using AMSR-E and AMSR2. Water Resour. Res. 2019, 55, 5394–5412. [Google Scholar] [CrossRef]
- Jia, S.; Kim, S.H.; Nghiem, S.V.; Kafatos, M. Estimating Live Fuel Moisture Using SMAP L-Band Radiometer Soil Moisture for Southern California, USA. Remote Sens. 2019, 11, 1575. [Google Scholar] [CrossRef] [Green Version]
- Bolten, J.D.; Crow, W.T.; Zhan, X.; Jackson, T.J.; Reynolds, C.A. Evaluating the Utility of Remotely Sensed Soil Moisture Retrievals for Operational Agricultural Drought Monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2009, 3, 57–66. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Zhou, G. Estimation of Soil Moisture from Optical and Thermal Remote Sensing: A Review. Sensors 2016, 16, 1308. [Google Scholar] [CrossRef] [Green Version]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive. Volume 3-From Theory to Applications; Artech House: Boston, MA, USA, 1986. [Google Scholar]
- Njoku, E.G.; Jackson, T.J.; Lakshmi, V.; Chan, T.K.; Nghiem, S.V. Soil Moisture Retrieval from AMSR-E. IEEE Trans. Geosci. Remote Sens. 2003, 41, 215–229. [Google Scholar] [CrossRef]
- Du, J.; Kimball, J.S.; Jones, L.A.; Kim, Y.; Glassy, J.; Watts, J.D. A Global Satellite Environmental Data Record Derived from AMSR-E and AMSR2 Microwave Earth Observations. Earth Syst. Sci. Data 2017, 9, 791–808. [Google Scholar] [CrossRef] [Green Version]
- Jackson, T.J.; Cosh, M.H.; Bindlish, R.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Goodrich, D.C.; Moran, M.S.; Du, J. Validation of Advanced Microwave Scanning Radiometer Soil Moisture Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4256–4272. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Martinuzzi, J.; Font, J.; Berger, M. Soil Moisture Retrieval from Space: The Soil Moisture and Ocean Salinity (SMOS) Mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Chan, S.K.; Bindlish, R.; O’Neill, P.; Jackson, T.; Njoku, E.; Dunbar, S.; Chaubell, J.; Piepmeier, J.; Yueh, S.; Entekhabi, D. Development and Assessment of the SMAP Enhanced Passive Soil Moisture Product. Remote Sens. Environ. 2018, 204, 931–941. [Google Scholar] [CrossRef] [Green Version]
- Colliander, A.; Jackson, T.J.; Chan, S.K.; O’Neill, P.; Bindlish, R.; Cosh, M.H.; Caldwell, T.; Walker, J.P.; Berg, A.; McNairn, H. An Assessment of the Differences between Spatial Resolution and Grid Size for the SMAP Enhanced Soil Moisture Product over Homogeneous Sites. Remote Sens. Environ. 2018, 207, 65–70. [Google Scholar] [CrossRef]
- Kawanishi, T.; Sezai, T.; Ito, Y.; Imaoka, K.; Takeshima, T.; Ishido, Y.; Shibata, A.; Miura, M.; Inahata, H.; Spencer, R.W. The Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E), NASDA’s Contribution to the EOS for Global Energy and Water Cycle Studies. IEEE Trans. Geosci. Remote Sens. 2003, 41, 184–194. [Google Scholar] [CrossRef]
- Peng, J.; Loew, A.; Merlin, O.; Verhoest, N.E. A Review of Spatial Downscaling of Satellite Remotely Sensed Soil Moisture. Rev. Geophys. 2017, 55, 341–366. [Google Scholar] [CrossRef]
- Das, N.N.; Entekhabi, D.; Dunbar, R.S.; Colliander, A.; Chen, F.; Crow, W.; Jackson, T.J.; Berg, A.; Bosch, D.D.; Caldwell, T. The SMAP Mission Combined Active-Passive Soil Moisture Product at 9 Km and 3 Km Spatial Resolutions. Remote Sens. Environ. 2018, 211, 204–217. [Google Scholar] [CrossRef]
- Huang, X.; Ziniti, B.; Cosh, M.H.; Reba, M.; Wang, J.; Torbick, N. Field-Scale Soil Moisture Retrieval Using Palsar-2 Polarimetric Decomposition and Machine Learning. Agronomy 2020, 11, 35. [Google Scholar] [CrossRef]
- Merlin, O.; Walker, J.P.; Chehbouni, A.; Kerr, Y. Towards Deterministic Downscaling of SMOS Soil Moisture Using MODIS Derived Soil Evaporative Efficiency. Remote Sens. Environ. 2008, 112, 3935–3946. [Google Scholar] [CrossRef] [Green Version]
- Abowarda, A.S.; Bai, L.; Zhang, C.; Long, D.; Li, X.; Huang, Q.; Sun, Z. Generating Surface Soil Moisture at 30 m Spatial Resolution Using Both Data Fusion and Machine Learning toward Better Water Resources Management at the Field Scale. Remote Sens. Environ. 2021, 255, 112301. [Google Scholar] [CrossRef]
- Fang, B.; Lakshmi, V.; Cosh, M.; Liu, P.-W.; Bindlish, R.; Jackson, T.J. A Global 1-km Downscaled SMAP Soil Moisture Product Based on Thermal Inertia Theory. Vadose Zone J. 2022, 21, e20182. [Google Scholar] [CrossRef]
- Vergopolan, N.; Chaney, N.W.; Beck, H.E.; Pan, M.; Sheffield, J.; Chan, S.; Wood, E.F. Combining Hyper-Resolution Land Surface Modeling with SMAP Brightness Temperatures to Obtain 30-m Soil Moisture Estimates. Remote Sens. Environ. 2020, 242, 111740. [Google Scholar] [CrossRef]
- Sabaghy, S.; Walker, J.P.; Renzullo, L.J.; Jackson, T.J. Spatially Enhanced Passive Microwave Derived Soil Moisture: Capabilities and Opportunities. Remote Sens. Environ. 2018, 209, 551–580. [Google Scholar] [CrossRef]
- Piles, M.; Camps, A.; Vall-Llossera, M.; Corbella, I.; Panciera, R.; Rudiger, C.; Kerr, Y.H.; Walker, J. Downscaling SMOS-Derived Soil Moisture Using MODIS Visible/Infrared Data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3156–3166. [Google Scholar] [CrossRef]
- Das, N.N.; Entekhabi, D.; Dunbar, R.S.; Chaubell, M.J.; Colliander, A.; Yueh, S.; Jagdhuber, T.; Chen, F.; Crow, W.; O’Neill, P.E. The SMAP and Copernicus Sentinel 1A/B Microwave Active-Passive High Resolution Surface Soil Moisture Product. Remote Sens. Environ. 2019, 233, 111380. [Google Scholar] [CrossRef]
- Im, J.; Park, S.; Rhee, J.; Baik, J.; Choi, M. Downscaling of AMSR-E Soil Moisture with MODIS Products Using Machine Learning Approaches. Environ. Earth Sci. 2016, 75, 1120. [Google Scholar] [CrossRef]
- Long, D.; Bai, L.; Yan, L.; Zhang, C.; Yang, W.; Lei, H.; Quan, J.; Meng, X.; Shi, C. Generation of Spatially Complete and Daily Continuous Surface Soil Moisture of High Spatial Resolution. Remote Sens. Environ. 2019, 233, 111364. [Google Scholar] [CrossRef]
- Du, J.; Watts, J.D.; Jiang, L.; Lu, H.; Cheng, X.; Duguay, C.; Farina, M.; Qiu, Y.; Kim, Y.; Kimball, J.S. Remote Sensing of Environmental Changes in Cold Regions: Methods, Achievements and Challenges. Remote Sens. 2019, 11, 1952. [Google Scholar] [CrossRef] [Green Version]
- Du, J.; Kimball, J.S.; Sheffield, J.; Pan, M.; Fisher, C.K.; Beck, H.E.; Wood, E.F. Satellite Flood Inundation Assessment and Forecast Using SMAP and Landsat. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6707–6715. [Google Scholar] [CrossRef]
- Liao, T.-H.; Kim, S.-B.; Handwerger, A.L.; Fielding, E.J.; Cosh, M.H.; Schulz, W.H. High-Resolution Soil-Moisture Maps Over Landslide Regions in Northern California Grassland Derived From SAR Backscattering Coefficients. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4547–4560. [Google Scholar] [CrossRef]
- Cooley, S.W.; Smith, L.C.; Stepan, L.; Mascaro, J. Tracking Dynamic Northern Surface Water Changes with High-Frequency Planet CubeSat Imagery. Remote Sens. 2017, 9, 1306. [Google Scholar] [CrossRef] [Green Version]
- Kääb, A.; Altena, B.; Mascaro, J. River-Ice and Water Velocities Using the Planet Optical Cubesat Constellation. Hydrol. Earth Syst. Sci. 2019, 23, 4233–4247. [Google Scholar] [CrossRef] [Green Version]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Panciera, R.; Walker, J.P.; Jackson, T.J.; Gray, D.A.; Tanase, M.A.; Ryu, D.; Monerris, A.; Yardley, H.; Rüdiger, C.; Wu, X. The Soil Moisture Active Passive Experiments (SMAPEx): Toward Soil Moisture Retrieval from the SMAP Mission. IEEE Trans. Geosci. Remote Sens. 2013, 52, 490–507. [Google Scholar] [CrossRef]
- Ye, N.; Walker, J.P.; Wu, X.; De Jeu, R.; Gao, Y.; Jackson, T.J.; Jonard, F.; Kim, E.; Merlin, O.; Pauwels, V.R. The Soil Moisture Active Passive Experiments: Validation of the SMAP Products in Australia. IEEE Trans. Geosci. Remote Sens. 2020, 59, 2922–2939. [Google Scholar] [CrossRef]
- Merlin, O.; Walker, J.; Panciera, R.; Young, R.; Kalma, J.; Kim, E. Soil Moisture Measurement in Heterogeneous Terrain. In Proceedings of the International Congress on Modelling and Simulation (MODSIM), Christchurch, New Zealand, 10–13 December 2007; pp. 2604–2610. [Google Scholar]
- Geoscience Australia. Digital Elevation Model (DEM) of Australia derived from LiDAR 5 Metre Grid; Geoscience Australia: Canberra, Australia, 2015. [Google Scholar]
- Smith, A.B.; Walker, J.P.; Western, A.W.; Young, R.I.; Ellett, K.M.; Pipunic, R.C.; Grayson, R.B.; Siriwardena, L.; Chiew, F.H.; Richter, H. The Murrumbidgee Soil Moisture Monitoring Network Data Set. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Wu, X.; Ye, N.; Walker, J.; Yeo, I.-Y.; Jackson, T.; Kerr, Y.; Kim, E.; McGrath, A. The P-band Radiometer Inferred Soil Moisture Experiment 2021; Workplan; Monash University: Clayton, Australia, 2021. [Google Scholar]
- Frazier, A.E.; Hemingway, B.L. A Technical Review of Planet Smallsat Data: Practical Considerations for Processing and Using Planetscope Imagery. Remote Sens. 2021, 13, 3930. [Google Scholar] [CrossRef]
- Chaubell, J.; Yueh, S.; Entekhabi, D.; Peng, J. Resolution Enhancement of SMAP Radiometer Data Using the Backus Gilbert Optimum Interpolation Technique. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 284–287. [Google Scholar]
- Chaubell, M.J.; Yueh, S.H.; Dunbar, R.S.; Colliander, A.; Chen, F.; Chan, S.K.; Entekhabi, D.; Bindlish, R.; O’Neill, P.E.; Asanuma, J. Improved SMAP Dual-Channel Algorithm for the Retrieval of Soil Moisture. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3894–3905. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Routledge: New York, NY, USA, 2017; ISBN 1-315-13947-2. [Google Scholar]
- Friedman, J.H. Stochastic Gradient Boosting. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. Lightgbm: A Highly Efficient Gradient Boosting Decision Tree. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Steinberg, D. CART: Classification and Regression Trees. In The Top Ten Algorithms in Data Mining; Chapman and Hall/CRC: London, UK, 2009; pp. 193–216. ISBN 0-429-13842-3. [Google Scholar]
- Watts, J.D.; Lawrence, R.L. Merging Random Forest Classification with an Object-Oriented Approach for Analysis of Agricultural Lands. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 2008. [Google Scholar]
- Aubert, D.; Loumagne, C.; Oudin, L. Sequential Assimilation of Soil Moisture and Streamflow Data in a Conceptual Rainfall–Runoff Model. J. Hydrol. 2003, 280, 145–161. [Google Scholar] [CrossRef]
- Wang, C.; Fu, B.; Zhang, L.; Xu, Z. Soil Moisture–Plant Interactions: An Ecohydrological Review. J. Soils Sediments 2019, 19, 1–9. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D. Bias Reduction in Short Records of Satellite Soil Moisture. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef] [Green Version]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P. Soil Moisture Estimation through ASCAT and AMSR-E Sensors: An Intercomparison and Validation Study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Su, C.-H.; Ryu, D.; Young, R.I.; Western, A.W.; Wagner, W. Inter-Comparison of Microwave Satellite Soil Moisture Retrievals over the Murrumbidgee Basin, Southeast Australia. Remote Sens. Environ. 2013, 134, 1–11. [Google Scholar] [CrossRef]
- Barnes, E.M.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.D.; Haberland, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T. Coincident Detection of Crop Water Stress, Nitrogen Status and Canopy Density Using Ground Based Multispectral Data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA, 16–19 July 2000; Volume 1619, p. 6. [Google Scholar]
- Wilson, D.J.; Western, A.W.; Grayson, R.B. A Terrain and Data-Based Method for Generating the Spatial Distribution of Soil Moisture. Adv. Water Resour. 2005, 28, 43–54. [Google Scholar] [CrossRef]
- Yee, M.S.; Walker, J.P.; Monerris, A.; Rüdiger, C.; Jackson, T.J. On the Identification of Representative in Situ Soil Moisture Monitoring Stations for the Validation of SMAP Soil Moisture Products in Australia. J. Hydrol. 2016, 537, 367–381. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predictor Name | Description | Number of Predictors |
|---|---|---|
| Reflectance of PSD band k (k = 1 to 8) | 8 | |
| Normalized reflectance difference between band i and j | 28 | |
| N/A | 1 | |
| N/A | 1 | |
| The number of each 10-day period in a year | 1 |
| Method | Parameter | From | To | Step | Other Options | Selected |
|---|---|---|---|---|---|---|
| LightGBRegressor | max_depth | 5 | 30 | 5 | 20 | |
| n_estimators | 20 | 120 | 20 | 120 | ||
| num_leaves | 20 | 120 | 20 | 60 | ||
| Random forest | max_depth | 5 | 30 | 5 | 20 | |
| n_estimators | 20 | 120 | 20 | 100 | ||
| max_features | 0.5 | 0.9 | 0.2 | ‘auto’, ‘log2’, ‘sqrt’ | 0.9 | |
| GradientBoosting | max_depth | 5 | 30 | 5 | 30 | |
| n_estimators | 20 | 120 | 20 | 60 | ||
| max_features | 0.5 | 0.9 | 0.2 | ‘auto’, ‘log2’, ‘sqrt’ | 0.7 |
| Method | R2 | RMSE (cm3/cm3) |
|---|---|---|
| LightGBRegressor | 0.857 | 0.029 |
| Random forest | 0.846 | 0.030 |
| GradientBoosting | 0.856 | 0.029 |
| Linear | 0.591 | 0.050 |
| Predictor | Score |
|---|---|
| N10DOY | 7.9% |
| Near-infrared band reflectance | 5.9% |
| Slope | 4.5% |
| Elevation | 4.3% |
| Red-edge band reflectance | 4.2% |
| Site | SMAP | LGBMR | CDF | SMAP | LGBMR | CDF | SMAP | LGBMR | CDF | Number |
|---|---|---|---|---|---|---|---|---|---|---|
| RMSE (cm3/cm3) | Absolute Bias (cm3/cm3) | Correlation | ||||||||
| Y8 | 0.041 | 0.040 | 0.030 | 0.009 | 0.005 | 0.005 | 0.902 | 0.841 | 0.906 | 41 |
| Yb5e | 0.095 | 0.102 | 0.099 | 0.084 | 0.091 | 0.091 | 0.863 | 0.824 | 0.860 | 41 |
| Yb5d | 0.079 | 0.089 | 0.081 | 0.070 | 0.075 | 0.075 | 0.901 | 0.750 | 0.898 | 42 |
| Yb7c | 0.073 | 0.064 | 0.061 | 0.063 | 0.050 | 0.050 | 0.906 | 0.868 | 0.906 | 44 |
| Yb7d | 0.048 | 0.040 | 0.033 | 0.024 | 0.010 | 0.010 | 0.888 | 0.832 | 0.888 | 45 |
| Yb3 | 0.064 | 0.108 | 0.104 | 0.036 | 0.075 | 0.075 | 0.849 | 0.707 | 0.834 | 44 |
| Y10 | 0.044 | 0.049 | 0.049 | 0.003 | 0.018 | 0.018 | 0.926 | 0.921 | 0.923 | 48 |
| Y7 | 0.047 | 0.048 | 0.043 | 0.033 | 0.028 | 0.028 | 0.915 | 0.872 | 0.914 | 48 |
| Y1 | 0.097 | 0.077 | 0.075 | 0.086 | 0.066 | 0.066 | 0.760 | 0.670 | 0.763 | 55 |
| Y5 | 0.096 | 0.086 | 0.079 | 0.082 | 0.066 | 0.066 | 0.703 | 0.534 | 0.703 | 52 |
| Y13 | 0.080 | 0.060 | 0.049 | 0.029 | 0.009 | 0.009 | 0.830 | 0.671 | 0.834 | 53 |
| Y9 | 0.066 | 0.074 | 0.061 | 0.048 | 0.042 | 0.042 | 0.924 | 0.832 | 0.924 | 54 |
| Y11 | 0.066 | 0.075 | 0.060 | 0.036 | 0.024 | 0.024 | 0.877 | 0.765 | 0.877 | 58 |
| Y12 | 0.096 | 0.055 | 0.045 | 0.073 | 0.040 | 0.040 | 0.862 | 0.590 | 0.873 | 58 |
| Allsites | 0.071 | 0.069 | 0.062 | 0.048 | 0.043 | 0.043 | 0.865 | 0.763 | 0.864 | 683 |
| Site | SMAP | CDF_Matching | SMAP | CDF_Matching | Number |
|---|---|---|---|---|---|
| RMSE (cm3/cm3) | Absolute Bias (cm3/cm3) | ||||
| Y8 | 0.049 | 0.039 | 0.004 | 0.005 | 164 |
| Yb5e | 0.100 | 0.107 | 0.086 | 0.095 | 163 |
| Yb5d | 0.083 | 0.082 | 0.071 | 0.071 | 164 |
| Yb7c | 0.077 | 0.068 | 0.057 | 0.046 | 160 |
| Yb7d | 0.064 | 0.044 | 0.037 | 0.017 | 163 |
| Yb3 | 0.083 | 0.117 | 0.040 | 0.086 | 162 |
| Y10 | 0.057 | 0.062 | 0.007 | 0.021 | 178 |
| Y7 | 0.063 | 0.055 | 0.041 | 0.035 | 178 |
| Y1 | 0.113 | 0.087 | 0.097 | 0.075 | 178 |
| Y5 | 0.107 | 0.085 | 0.091 | 0.068 | 178 |
| Y13 | 0.091 | 0.055 | 0.045 | 0.019 | 178 |
| Y9 | 0.074 | 0.070 | 0.043 | 0.036 | 178 |
| Y11 | 0.066 | 0.062 | 0.026 | 0.013 | 178 |
| Y12 | 0.111 | 0.049 | 0.086 | 0.040 | 178 |
| Allsites | 0.081 | 0.070 | 0.052 | 0.045 | 2400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, J.; Kimball, J.S.; Bindlish, R.; Walker, J.P.; Watts, J.D. Local Scale (3-m) Soil Moisture Mapping Using SMAP and Planet SuperDove. Remote Sens. 2022, 14, 3812. https://doi.org/10.3390/rs14153812
Du J, Kimball JS, Bindlish R, Walker JP, Watts JD. Local Scale (3-m) Soil Moisture Mapping Using SMAP and Planet SuperDove. Remote Sensing. 2022; 14(15):3812. https://doi.org/10.3390/rs14153812
Chicago/Turabian StyleDu, Jinyang, John S. Kimball, Rajat Bindlish, Jeffrey P. Walker, and Jennifer D. Watts. 2022. "Local Scale (3-m) Soil Moisture Mapping Using SMAP and Planet SuperDove" Remote Sensing 14, no. 15: 3812. https://doi.org/10.3390/rs14153812
APA StyleDu, J., Kimball, J. S., Bindlish, R., Walker, J. P., & Watts, J. D. (2022). Local Scale (3-m) Soil Moisture Mapping Using SMAP and Planet SuperDove. Remote Sensing, 14(15), 3812. https://doi.org/10.3390/rs14153812