
Multi-Sensor Sea Surface Temperature Products from the Australian Bureau of Meteorology


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data
2.1.1. AVHRR
2.1.2. VIIRS
2.1.3. Ancillary Fields
- Wind Speed
- Sea Ice Fraction
- Foundation SST Analysis
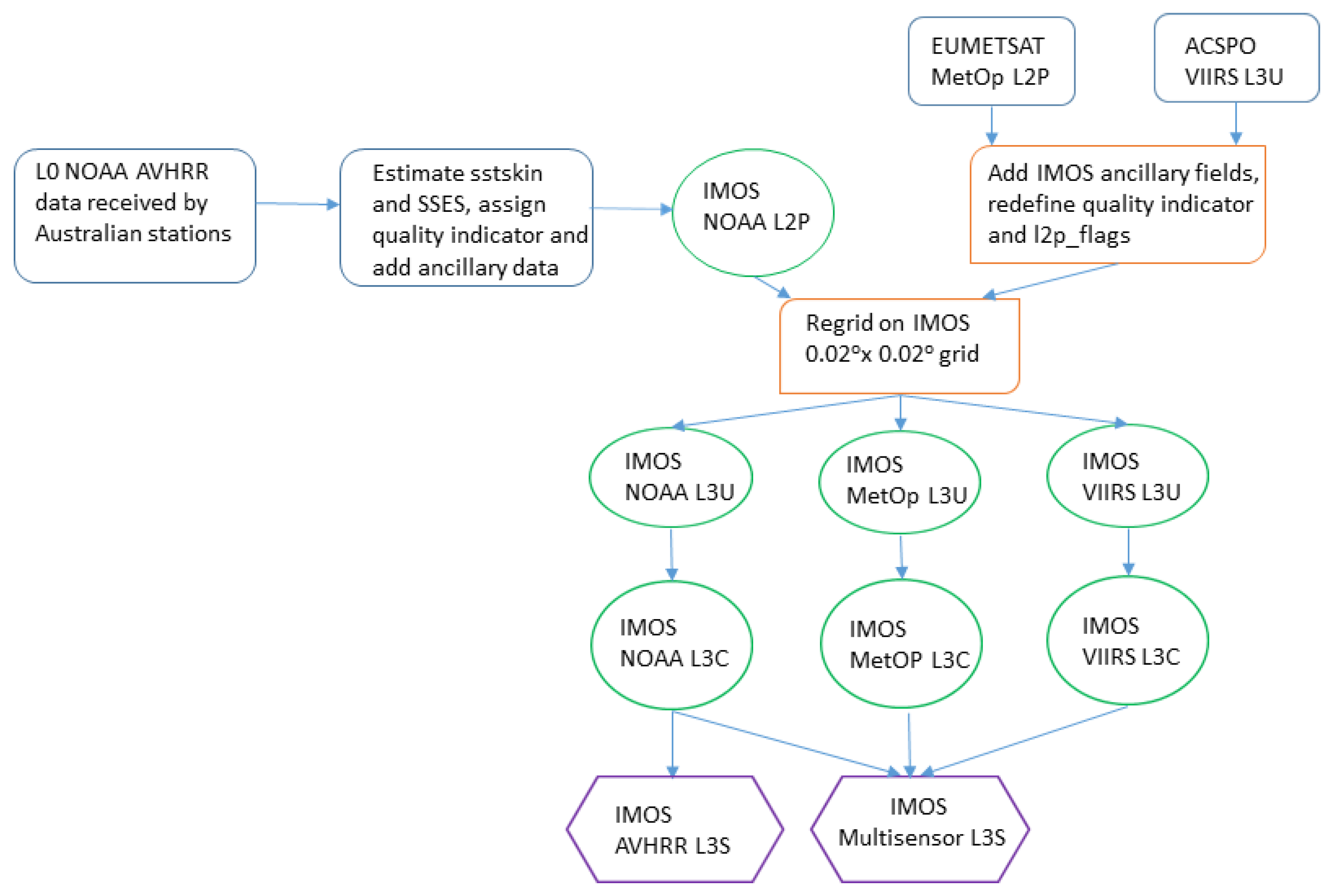
2.2. SST Processing Methods
2.2.1. IMOS HRPT AVHRR L2P
2.2.2. IMOS HRPT AVHRR L3U
2.2.3. IMOS FRAC AVHRR and VIIRS L3U
- Subskin SST from the original data producers is converted to skin SST by subtracting 0.17 K;
- Ancillary fields are replaced by the sources used for standard IMOS SST products (Section 2.1.3);
- l2p_flags are redefined using modified ancillary fields to conform with the standard IMOS L3U format [12];
- Sensor-Specific Error Statistics (SSES; [16] are maintained from the original sources as different retrieval methods are used by the original data producers;
- Quality level [16] is defined differently for each data source. It is not a reflection of the proximity to clouds, as is the case for IMOS HRPT AVHRR L3U SSTs [12,39]. To make the data from different sources comparable, the quality is redefined using the method based on the supplied quality level, SSES bias and SSES standard deviation, described below in Section 2.2.5.
2.2.4. IMOS L3C SST
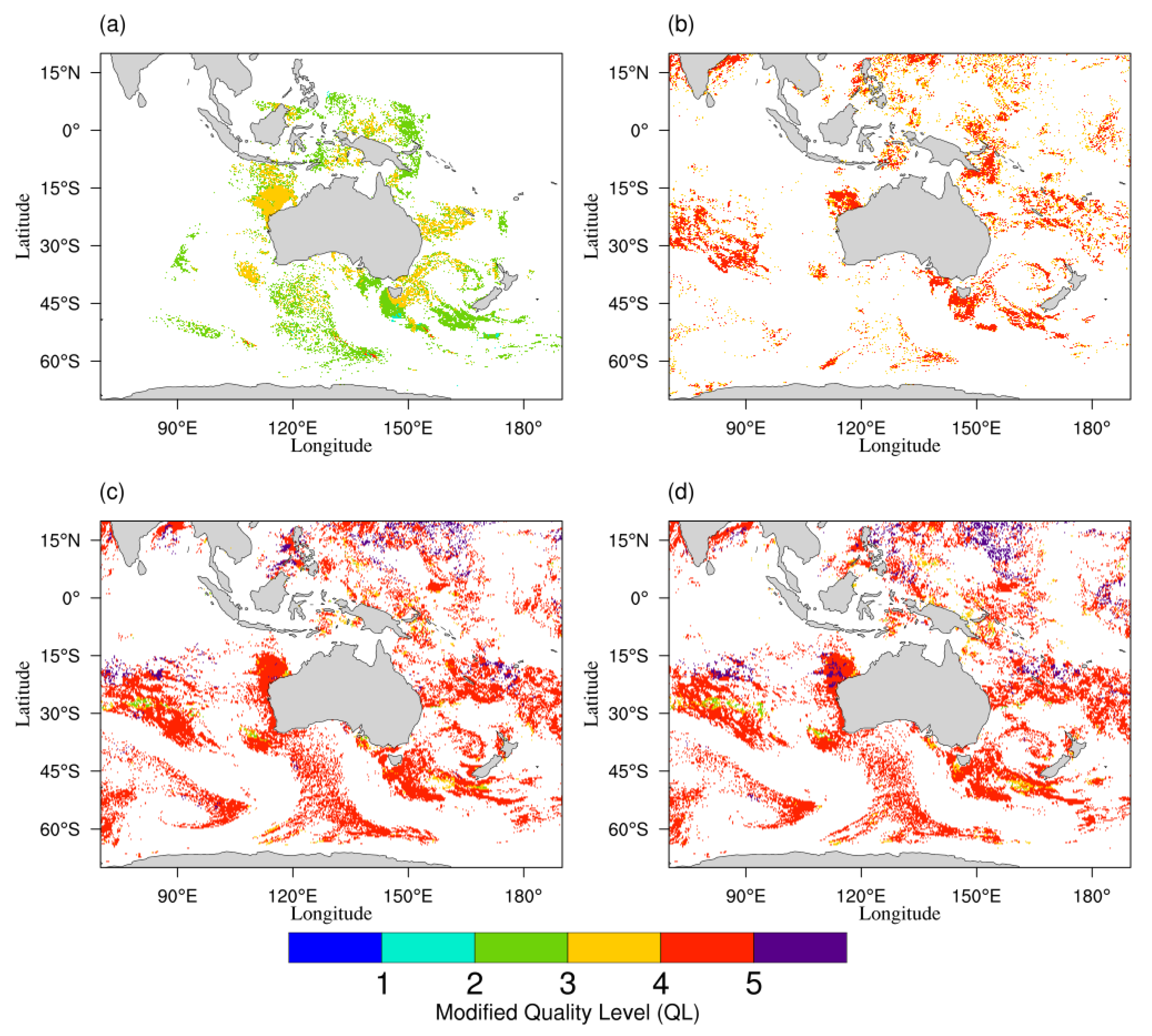
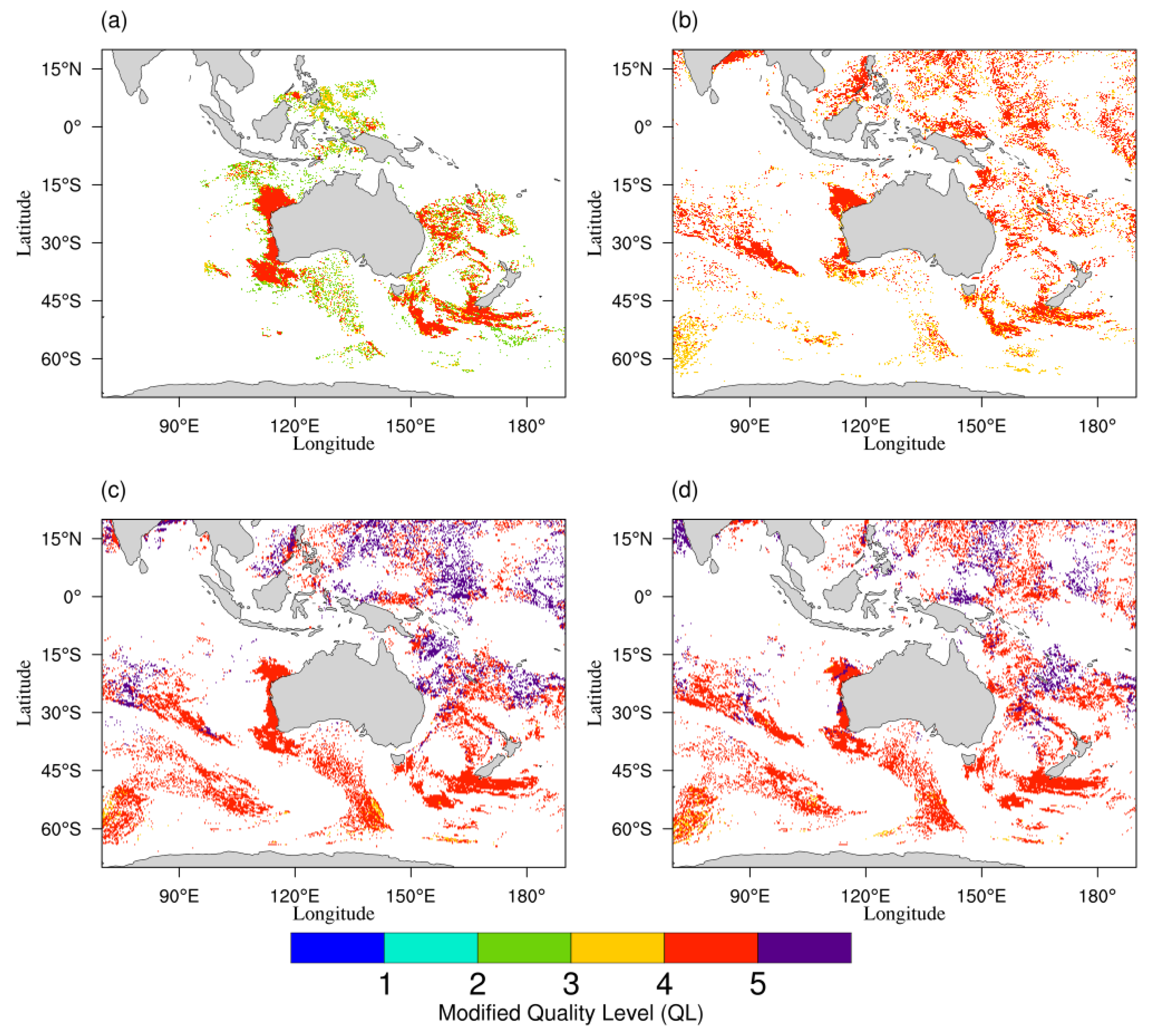
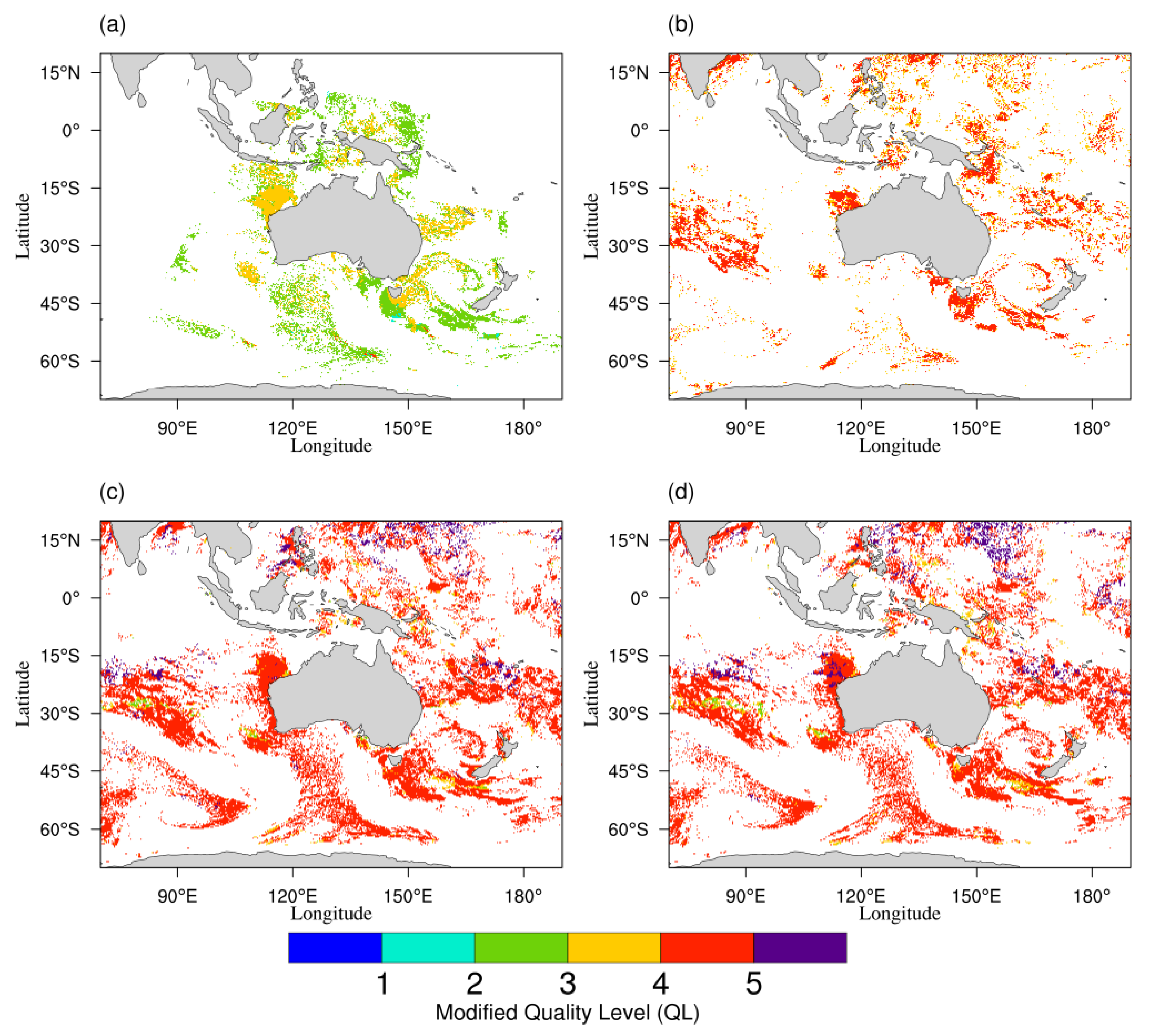
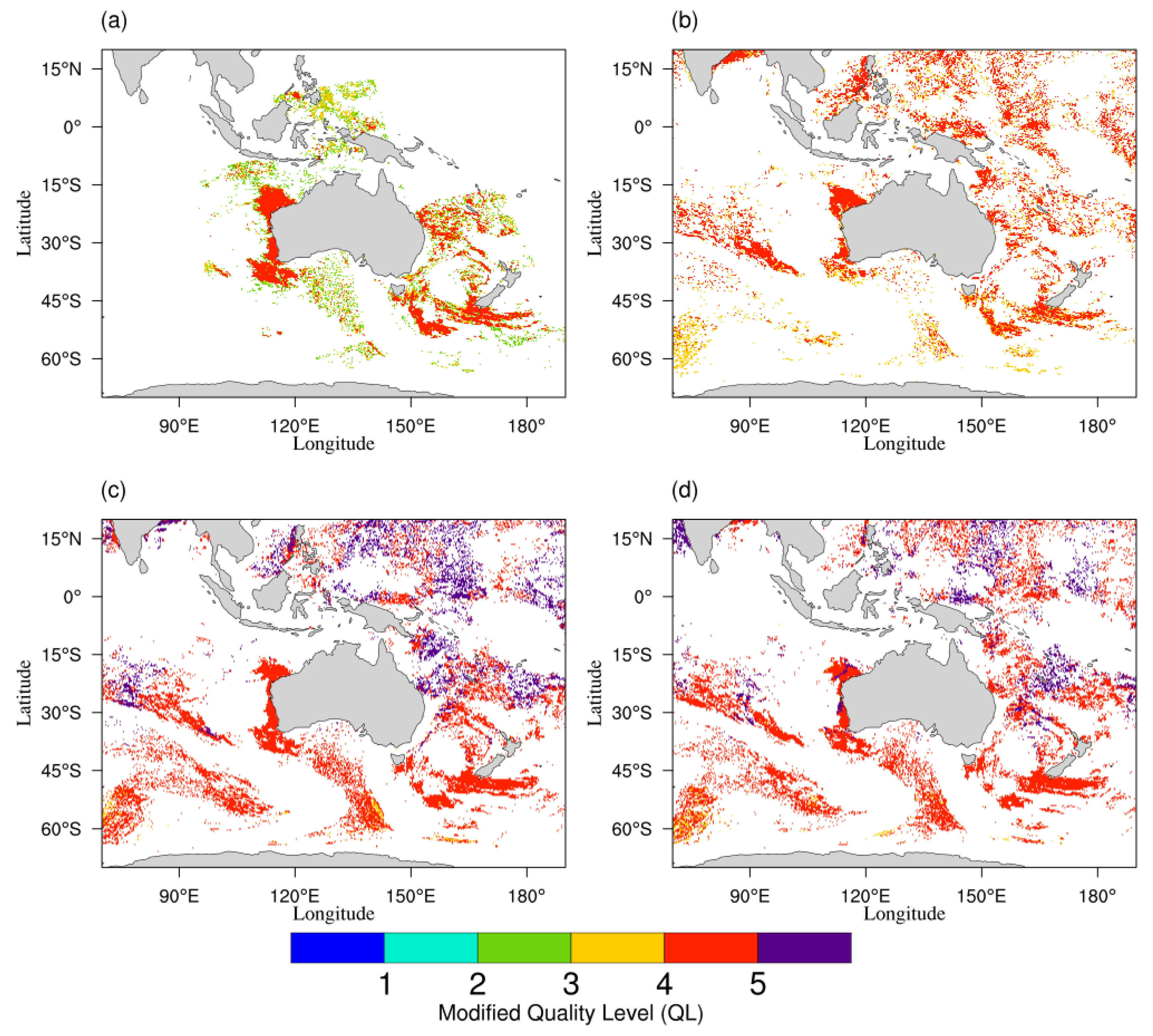
2.2.5. Quality Redefining (QR) Method
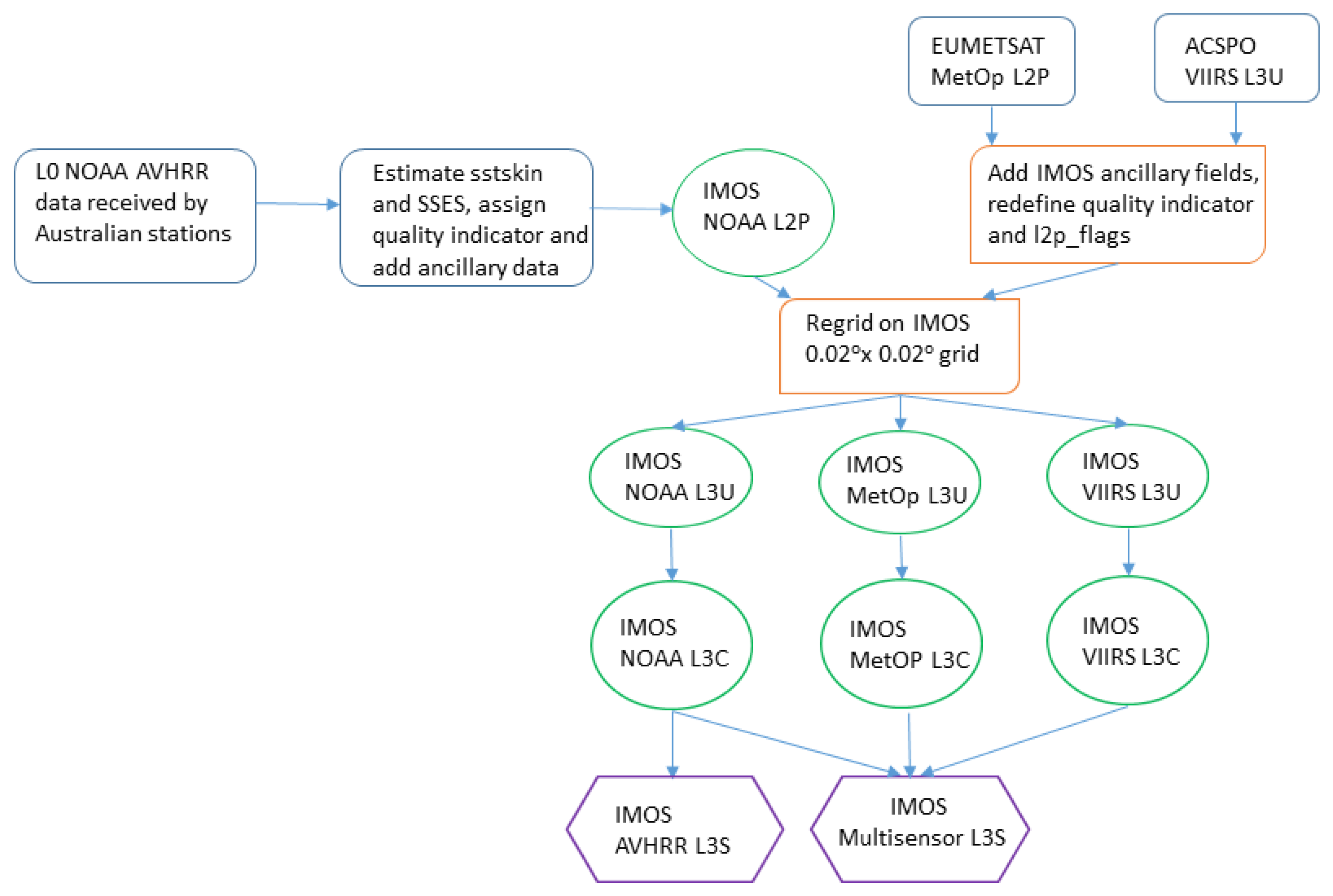
2.2.6. IMOS Multi-Sensor L3S SST
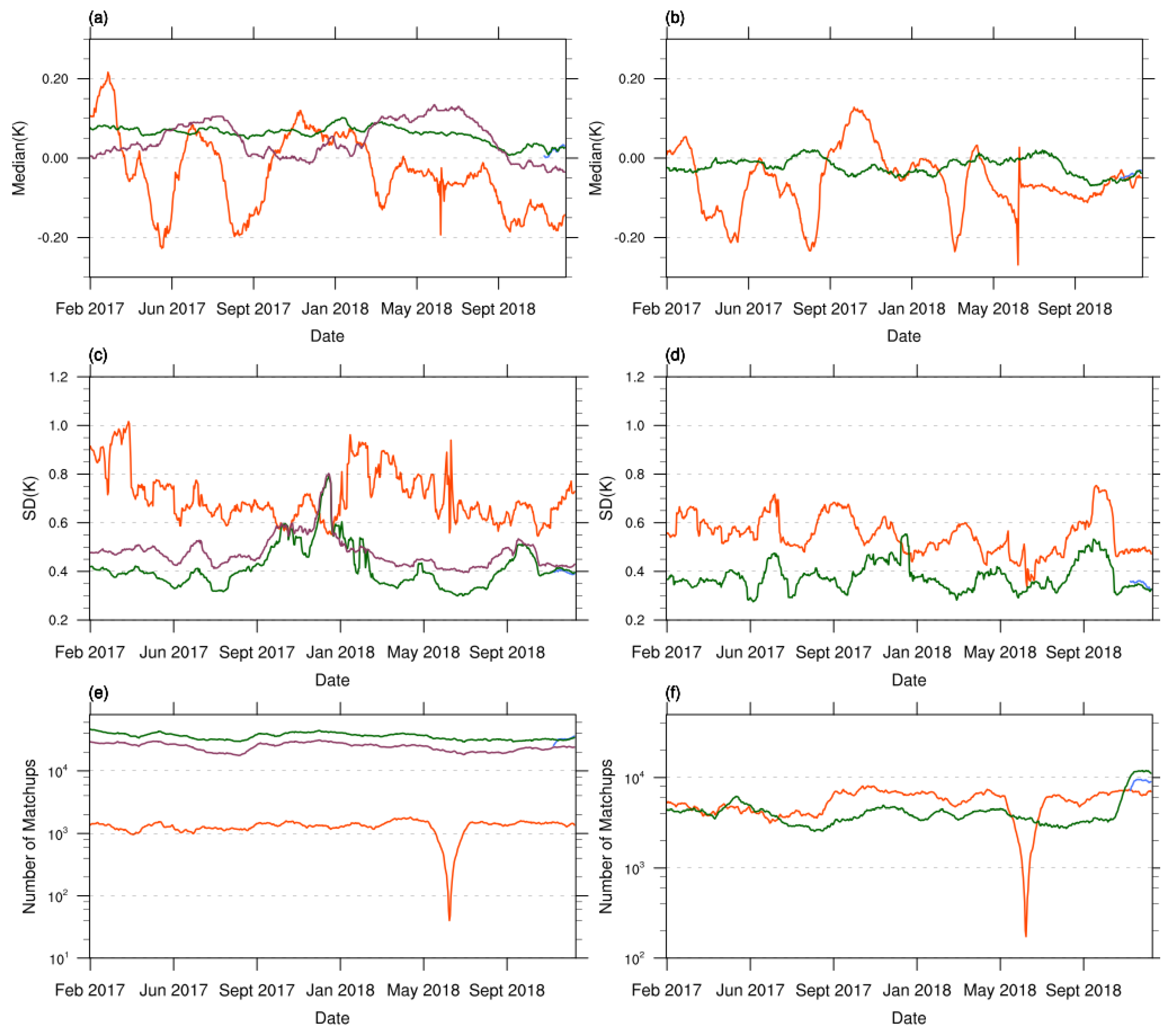
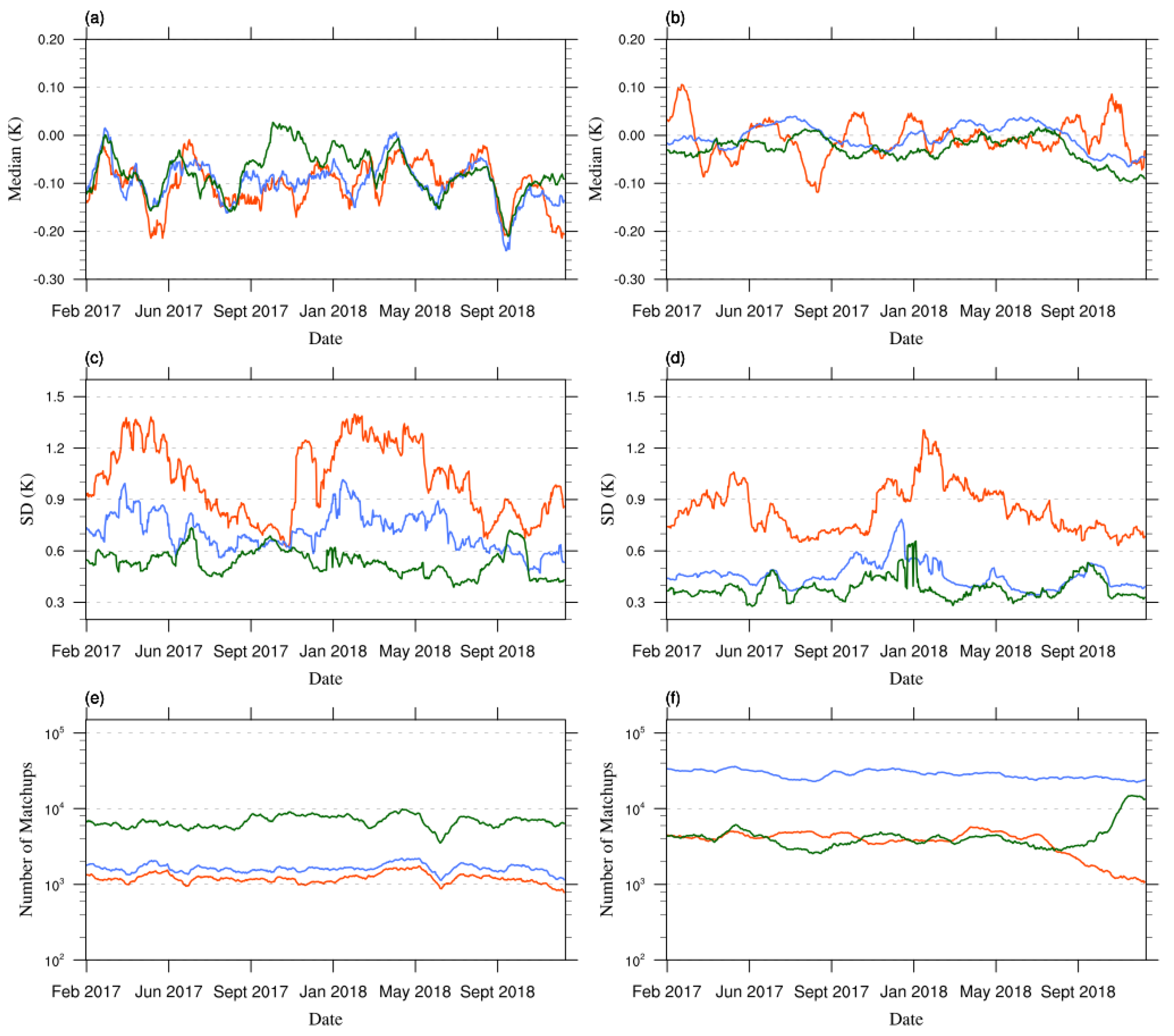
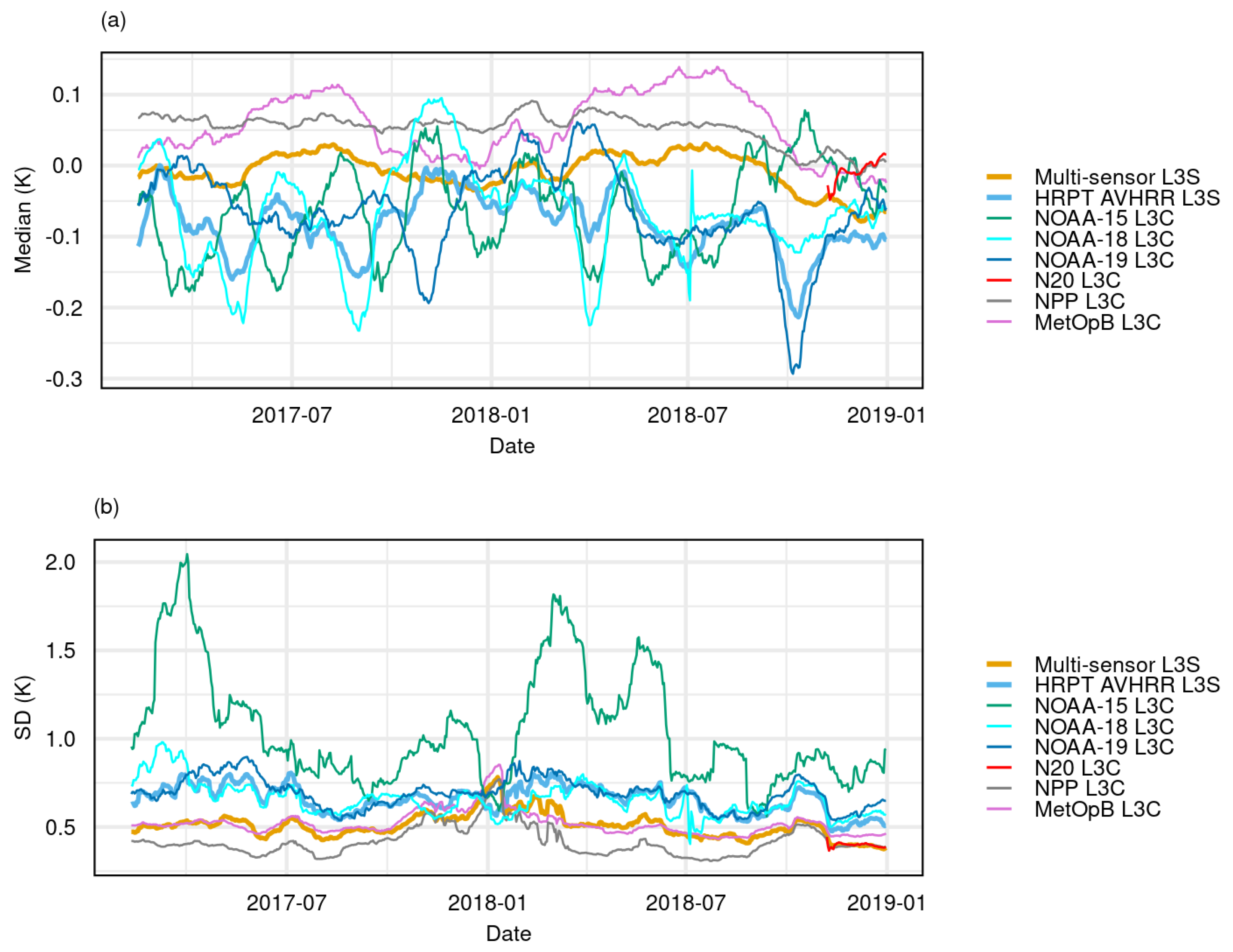
2.3. Validation
- In situ measurements are located over the time period corresponding to satellite observation;
- For each in situ measurement, all satellite observations within the requisite distance (10 km) and time (6 h) difference are selected;
- Matches are examined in groups, grouped by in situ observation, and the best match is determined for each in situ observation based on time and space difference and observation quality and retained.
- Unique observation measurements are generated per the previous algorithm for each L2P, L3U and L3C;
- Matches are collected over the entire scope (multiple L2P, L3U, L3C matches), then aggregated by satellite observation and in situ instrument identity;
- The best match is retained for each satellite observation and in situ instrument identity combination.
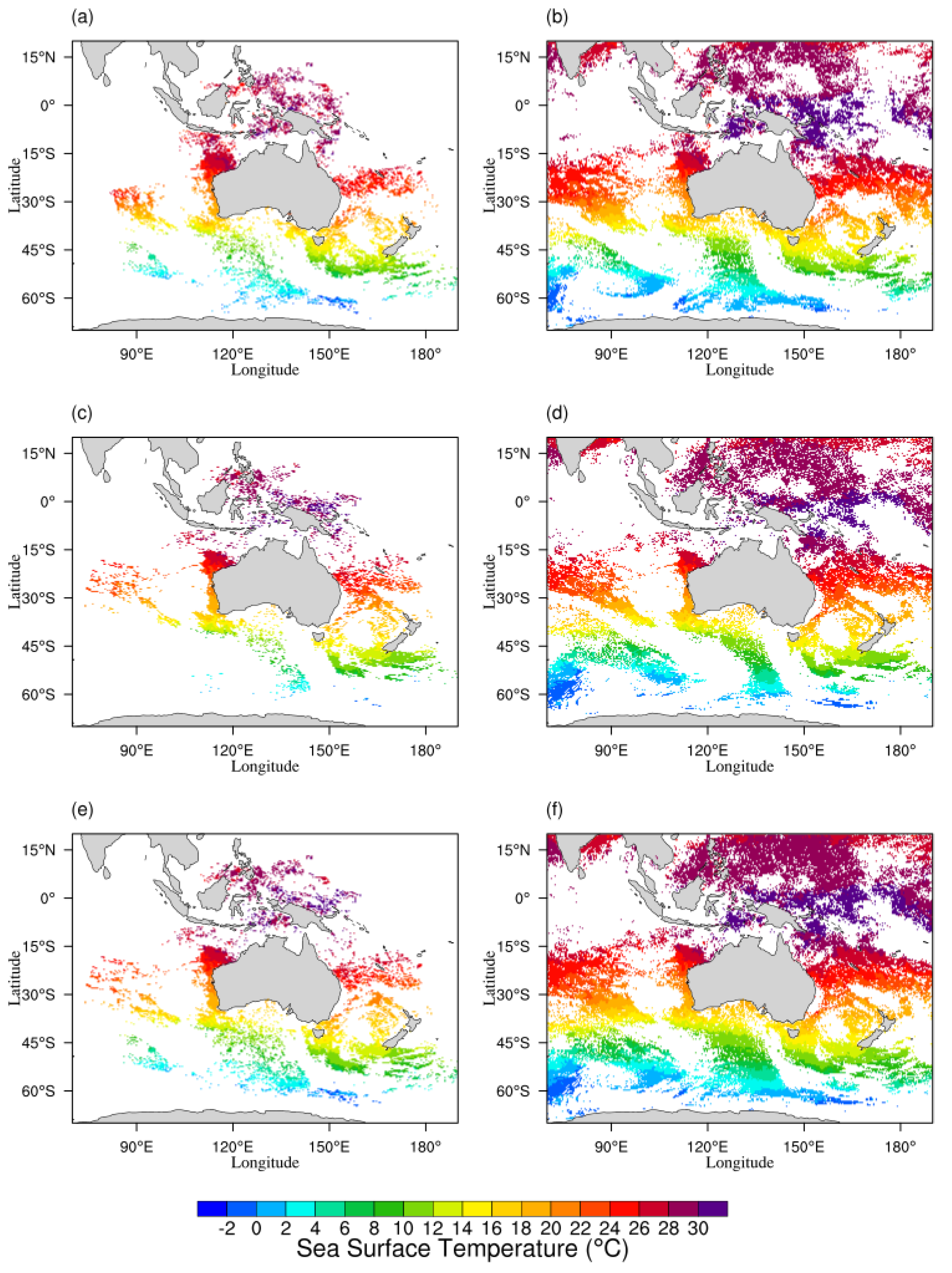
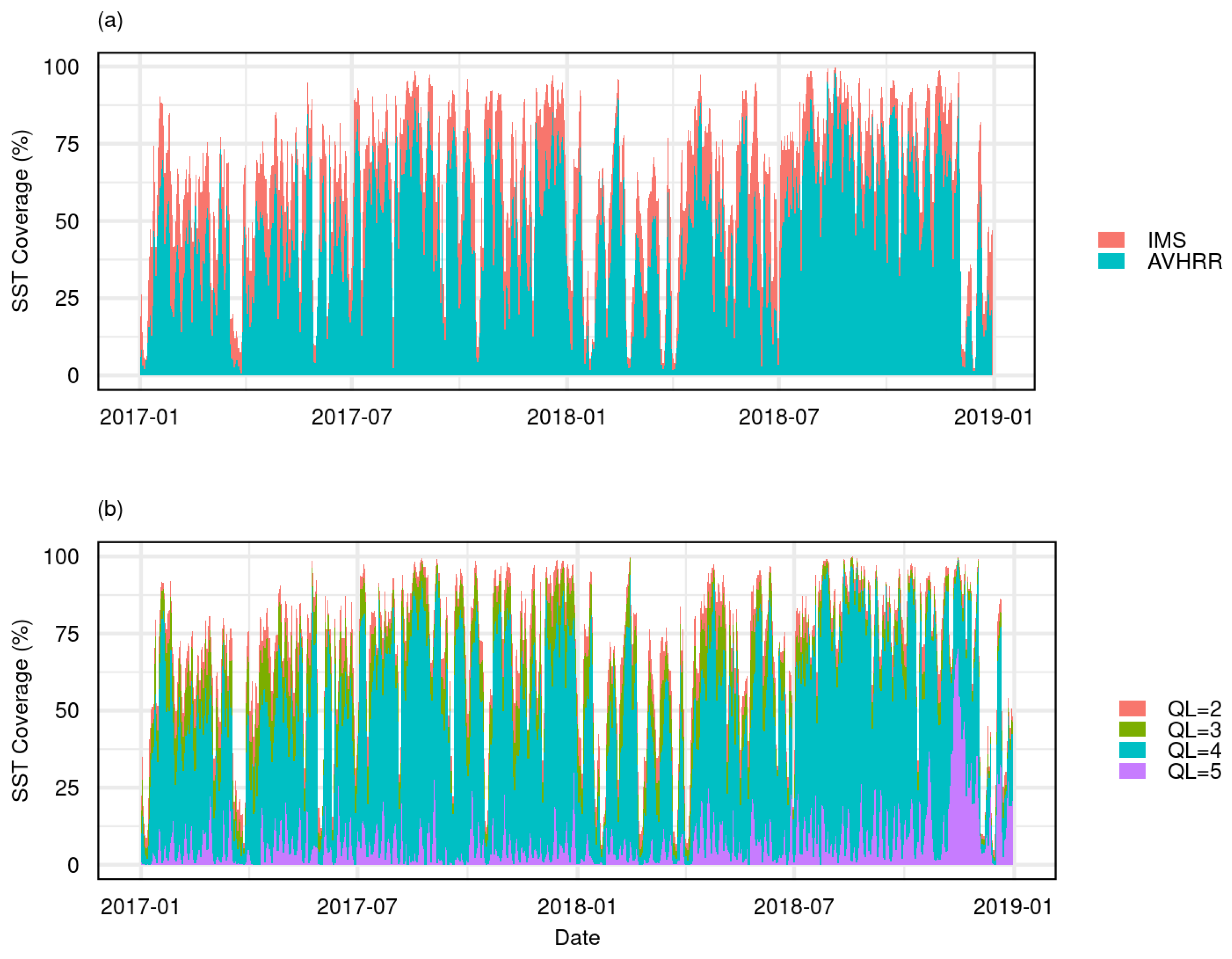
3. Results
3.1. IMOS L3C SSTs
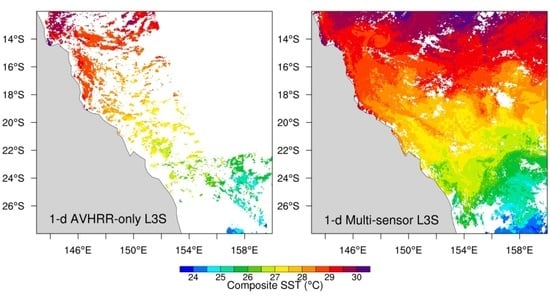
3.2. IMOS Multi-Sensor L3S SSTs
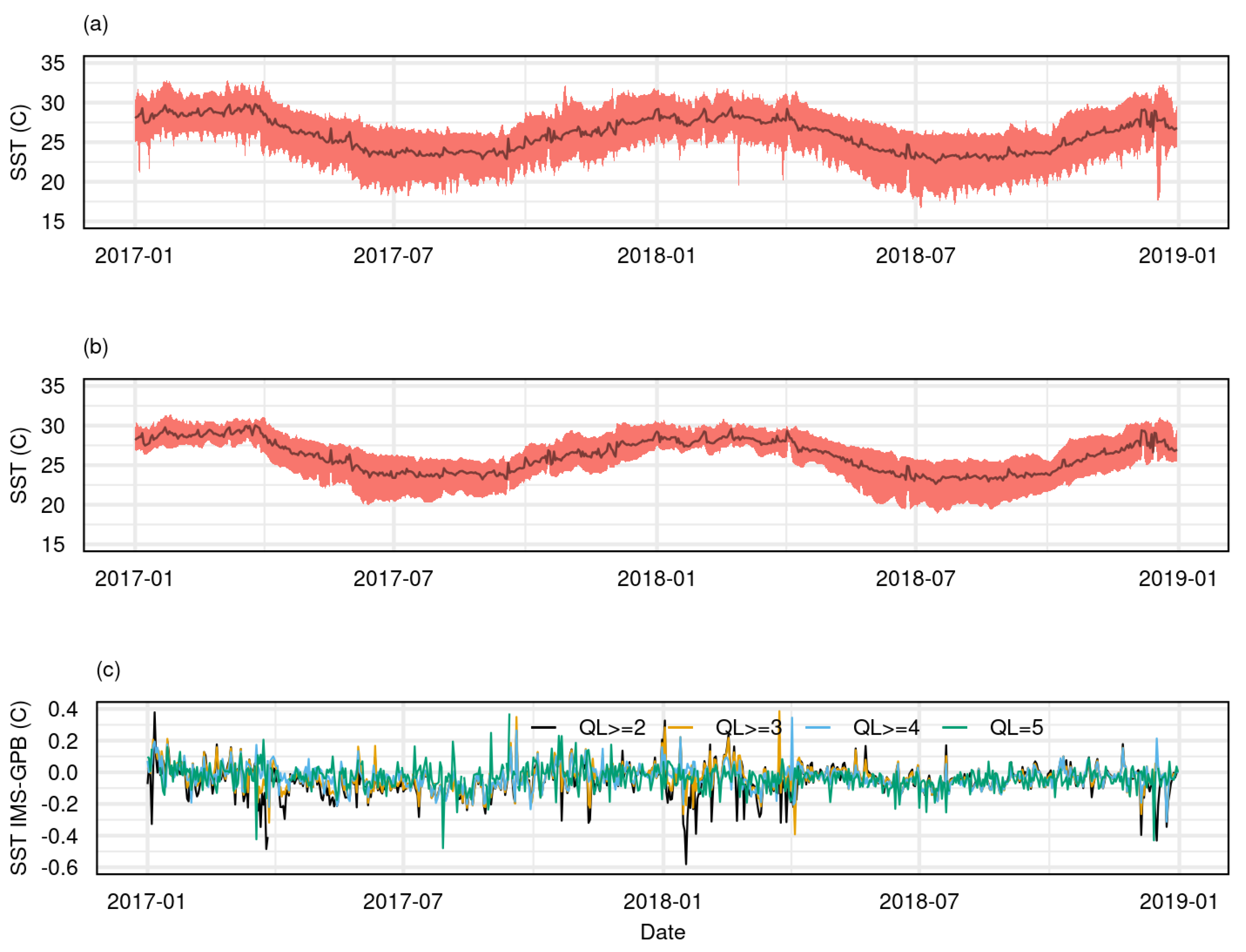
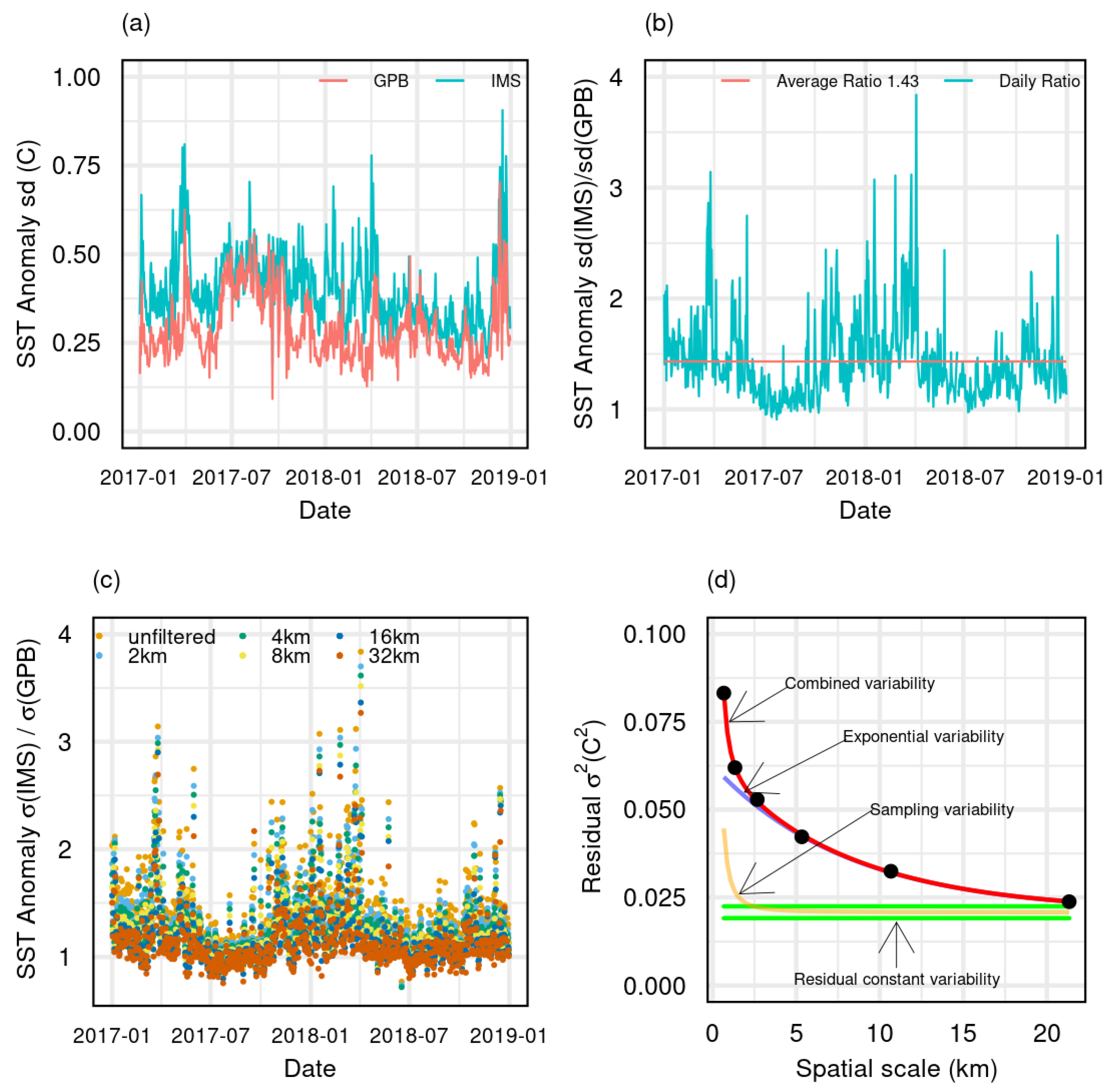
3.3. Case Study: The Great Barrier Reef
4. Discussion
- The BoM compositing algorithm uses sses_bias, sses_standard_deviation and degrees of freedom as parametric quality assessments and quality_level as a non-parametric measure. Only the highest non-parametric quality data are combined parametrically. Thus, we need an effective way to compare, in absolute terms, the quality of data streams from a non-parametric standpoint;
- It is necessary to be able to track degradations in quality over the platform’s life. This allows us to combine “old” platforms with “new” platforms with appropriate quality assessment;
- It allows us to reflect upon the greater uncertainty of measurement and degraded quality as the uncertainty and deviation from in situ measurement increases. Both lead to greater uncertainty so that the skin measurement follows the validation, and the method degrades the quality accordingly;
- It allows supplier quality assessment based on other metrics to be included in the discussion. The process of quality remapping does not promote retrieval to higher quality, it only degrades it based on estimates of SSES parameters. This will tend to push quality assessments down, but they remain closer to an absolute (over time) assessment.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AVHRR | The Advanced Very-High-Resolution Radiometer |
| BoM | Australian Bureau of Meteorology |
| CSIRO | Commonwealth Scientific and Industrial Research Organisation |
| ECMWF | European Centre for Medium-Range Weather Forecasts |
| ECT | Equatorial Crossing Times |
| ESA | European Space Agency |
| FRAC | Full-Resolution Area Coverage |
| HRPT | High-Resolution Picture Transmissions |
| IMOS | Integrated Marine Observing System |
| IMS | IMOS Multi-sensor L3S |
| GBR | Great barrier Reef |
| GHRSST | Group for High-Resolution Sea Surface Temperature |
| GPB | Geo-polar Blended L4 SSTs |
| L2P | Level 2P |
| L3U | Level 3 Uncollated |
| L3C | Level 3 Collated |
| L3S | Level 3 Super-Collated |
| L4 | Level 4 |
| MetOp | Meteorological Operational satellite |
| NOAA | National Oceanic and Atmospheric Administration |
| N20 | NOAA-20 |
| NPOES | NOAA Polar-Orbiting Environmental Satellites |
| NPP | National Polar-orbiting Partnership |
| OSPO | Office of Satellite and Product Operations |
| SSES | Sensor-Specific Error Statistics |
| SST | Sea Surface Temperature |
| STAR | NOAA/NESDIS Center for Satellite Applications and Research |
| VIIRS | Visible Infrared Imaging Radiometer Suite |
| QR | Quality Redefining |
References
- Trenberth, K.E.; Caron, J.M.; Stepaniak, D.P. The atmospheric energy budget and implications for surface fluxes and ocean heat transport. Clim. Dyn. 2001, 17, 259–276. [Google Scholar] [CrossRef]
- Hausmann, U.; Czaja, A.; Marshall, J. Estimates of air-sea feedbacks on sea surface temperature anomalies in the Southern Ocean. J. Clim. 2016, 29, 439–454. [Google Scholar] [CrossRef] [Green Version]
- Tory, K.; Dare, R.A. Sea Surface Temperature Thresholds for Tropical Cyclone Formation. J. Clim. 2015, 28, 8171–8183. [Google Scholar] [CrossRef]
- Oliver, E.C.J.; Burrows, M.; Donat, M.G.; Sen Gupta, L.V.A.A.; Perkins-Kirkpatrick, S.E.; Benthuysen, J.A.; Hobday, N.J.H.A.J.; Moore, P.J.; Thomsen, M.S.; Wernberg, T.; et al. Projected Marine Heatwaves in the 21st Century and the Potential for Ecological Impact. Front. Mar. Sci. 2019, 6, 734. [Google Scholar] [CrossRef] [Green Version]
- Limer, B.D.; Bloomberg, J.; Holstein, D. The Influence of Eddies on Coral Larval Retention in the Flower Garden Banks. Front. Mar. Sci. 2020, 7, 372. [Google Scholar] [CrossRef]
- Beggs, H. Use of TIR from Space in Operational Systems; Springer: Berlin/Heidelberg, Germany, 2010; pp. 249–271. [Google Scholar] [CrossRef]
- Beggs, H. Temperature. In Earth Observation: Data, Processing and Applications. Volume 3B: Applications Surface Waters; CRCSI: Melbourne, Australia, 2021; pp. 245–279. ISBN 978-0-6482278-5-4. [Google Scholar]
- Minnett, P.; Alvera-Azcárate, A.; Chin, T.; Corlett, G.; Gentemann, C.; Karagali, I.; Li, X.; Marsouin, A.; Marullo, S.; Maturi, E.; et al. Half a century of satellite remote sensing of sea-surface temperature. Remote Sens. Environ. 2019, 233, 11366. [Google Scholar] [CrossRef]
- Donlon, C.; Robinson, I.; Casey, K.; Vasquez, J.; Gentemann, E.A.C.; May, D.; LeBorgne, P.; Piolle, J.; Barton, I.; Beggs, H.; et al. The Global Ocean Data Assimilation Project (GODAE) High Resolution Sea Surface Temperature Pilot Project (GHRSST-PP). Bull. Am. Meterological Soc. 2007, 88, 1197–1213. [Google Scholar] [CrossRef]
- National Oceanographic and Atmospheric Administration NESDIS 3S Sensor Stability for SST Web Site, Showing Night Duration Plots for NPOES and METOP Satellites, see “N Dur” Tab. Available online: https://www.star.nesdis.noaa.gov/sod/sst/3s/ (accessed on 19 April 2022).
- Beggs, H.; Griffin, C.; Govekar, P. New IMOS Multi-Sensor Sea Surface Temperature Composites Provide Better Coverage and Accuracy. 2019. Available online: https://imos.org.au/fileadmin/user_upload/shared/SRS/SST/Beggs_2019_IMOS_Multi-sensor_L3S_article_21Feb2018.pdf (accessed on 19 April 2022).
- Griffin, C.; Beggs, H.; Majewski, L. GHRSST Compliant AVHRR SST Products over the Australian Region Version 1; Technical Report; Bureau of Meteorology: Melbourne, Australia, 2017; p. 151. [Google Scholar]
- Wijffels, S.E.; Beggs, H.; Griffin, C.; Middleton, J.F.; Cahill, M.; King, E.; Jones, E.; Feng, M.; Benthuysen, J.A.; Steinberg, C.R.; et al. A fine spatial scale sea surface temperature atlas of the Australian regional seas (SSTAARS): Seasonal variability and trends around Australasia and New Zealand revisited. Clim. Dyn. Mar. Syst. 2018, 187, 156–196. [Google Scholar] [CrossRef]
- Garde, L.; Spillman, C.M.; Heron, S.; Beeden, R. ReefTemp Next Generation: A New Operational System for Monitoring Reef Thermal Stress. J. Oper. Oceanogr. 2014, 7, 21–33. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Beggs, H.; Wang, X.; Kiss, A.; Griffin, C. Seasonal patterns of SST diurnal variation over the Tropical Warm Pool region. J. Geophys. Res. Ocean. 2016, 121, 8077–8094. [Google Scholar] [CrossRef]
- GHRSST Science Team. The Recommended GHRSST Data Specification (GDS) 2.0, Document Revision 4; The GHRSST International Project Office, International GHRSST Project Office, University of Reading: Reading, UK, 2010; p. 123. [Google Scholar] [CrossRef]
- Hu, Y.; Beggs, H.; Wang, X.H. Inter-comparison of high-resolution SST climatology data sets over the Australian region. J. Geophygical Res. 2021, 126, e2021JC017221. [Google Scholar] [CrossRef]
- Layton, C.; Vermont, H.; Beggs, H.; Brassington, G.; Burke, A.; Hepburn, L.; Holbrook, N.; Grey, W.M.; Mesaglio, T.; Parvizi, E.; et al. Rafts of giant kelp wash ashore ≈ 450 km away from the nearest known populations and against the prevailing ocean current. Ecology 2022, 2022, e3795. [Google Scholar] [CrossRef]
- Roughan, M.; Hemming, M.; Schaeffer, A.; Austin, T.; Beggs, H.; Chen, M.; Feng, M.; Galibert, G.; Holden, C.; Hughes, D.; et al. Multi-decadal ocean temperature time-series and climatologies from Australia’s long-term National Reference Stations. Nat. Sci. Data 2022, 9, 157. [Google Scholar] [CrossRef]
- Beggs, H.; Govekar, P.; Griffin, C.; Majewski, L.; Qi, L.; Zhong, A.; Sakov, P. Report from the Australian RDAC to GHRSST-XX. In Proceedings of the GHRSST XX Science Team Meeting, Frascati, Italy, 3–7 June 2019; pp. 40–49. [Google Scholar]
- IMOS fv02 HRPT AVHRR L3U SST Data from NOAA-18. Available online: https://dapds00.nci.org.au/thredds/catalog/qm43/ghrsst/v02.0fv02/Continental/L3U/ABOM-L3U_GHRSST-SSTskin-AVHRR18_D/catalog.html (accessed on 19 April 2022).
- EUMETSAT FRAC AVHRR L2P SST Data. Available online: ftp://eftp1.ifremer.fr/cersatrt/project/osisaf/data/sst/l2p/global/avhrr_metop_b/ (accessed on 19 April 2022).
- NOAA/NESDIS/OSPO, Sea Surface Temperature Retrievals Produced by NOAA/NESDIS/OSPO Office from VIIRS Sensor on S-NPP Satellite. Ver. 2.61. PO.DAAC, CA, USA. Available online: https://podaac.jpl.nasa.gov/datasetlist?search=VIIRS_NPP-OSPO-L3U-v2.61 (accessed on 19 April 2022). [CrossRef]
- NOAA/NESDIS/OSPO, Sea Surface Temperature Retrievals Produced by NOAA/NESDIS/OSPO Office from VIIRS Sensor on NOAA-20 Satellite. Ver. 2.61. PO.DAAC, CA, USA. Available online: https://www.ncei.noaa.gov/access/metadata/landing-page/bin/iso?id=gov.noaa.nodc:GHRSST-VIIRS_N20-OSPO-L3U (accessed on 19 April 2022). [CrossRef]
- Liang, X.; Ignatov, A. AVHRR, MODIS and VIIRS radiometric stability and consistency in SST bands. J. Geophys. Res. Ocean. 2013, 118, 3161–3171. [Google Scholar] [CrossRef]
- LP DAAC, maintained by the NASA EOSDIS Land Processes Distributed Active Archive Center (LP DAAC) at the USGS Earth Resources Observation and Science (EROS) Center, Sioux Falls, South Dakota. Available online: https://lpdaac.usgs.gov/data/get-started-data/collection-overview/missions/s-npp-nasa-viirs-overview/ (accessed on 19 April 2022).
- Petrenko, B.; Ignatov, A.; Kihai, Y.; Dash, P. Sensor-specific error statistics for SST in the Advanced Clear-Sky Processor for Ocean. J. Atmos. Ocean. Technol. 2016, 33, 345–359. [Google Scholar] [CrossRef]
- Petrenko, B.; Ignatov, A.; Kihai, Y.; Dash, P. Evaluation and Selection of SST Regression Algorithms for JPSS VIIRS. J. Atmos. Ocean. Technol. Res. 2014, 119, 4580–4599. [Google Scholar] [CrossRef]
- Berrisford, P.; Dee, D.P.; Poli, P.; Brugge, R.; Fielding, M.; Fuentes, M.; Kållberg, P.W.; Kobayashi, S.; Uppala, S.; Simmons, A. The ERA-Interim Archive Version 2.0; ERA Report; ECMWF: Reading, UK, 2011. [Google Scholar]
- Puri, K.; Dietachmayer, G.; Steinle, P.; Dix, M.; Rikus, L.; Logan, L.; Naughton, M.; Tingwell, C.; Xiao, Y.; Barras, V.; et al. Implementation of the initial ACCESS numerical weather prediction system. Aust. Meteorol. Oceanogr. J. 2006, 63, 265–284. [Google Scholar] [CrossRef]
- Grumbine, R.W. Automated Passive Microwave Sea Ice Concentration Analysis at NCEP; Tech. Note NOAA/NCEP; NOAA National Centers for Environmental Prediction: College Park, MD, USA, 1996; pp. 1–13. [Google Scholar]
- Zhong, A.; Beggs, H. Operational Implementation of Global Australian Multi-Sensor Sea Surface Temperature Analysis. Anal. Predict. Oper. Bull. 2008, 77. [Google Scholar]
- Beggs, H.; Qi, L.; Govekar, P.; Griffin, C.; Majewski, L.; Qi, L.; Zhong, A.; Sakov, P. Ingesting VIIRS SST into the Bureau of Meteorology’s Operational SST Analyses. In Proceedings of the GHRSST XXI Science Team Meeting, Virtual, 1–4 June 2020; pp. 104–110. [Google Scholar] [CrossRef]
- King, E.A. The Australian AVHRR Data Set at CSIRO/EOC: Origins, Processes, Holdings and Prospects; CSIRO Earth Observation Centre Report; CSIRO Earth Observation Centre Report, CSIRO: Hobart, Australia, 2003; p. 48. [Google Scholar]
- Paltoglou, G.; Beggs, H.; Majewski, L. New Australian High Resolution AVHRR SST Products from the Integrated Marine Observing System, Extended Abstract. In Proceedings of the 15th Australian Remote Sensing and Photogrammetry Conference, Alice Springs, Australia, 13–17 September 2010. [Google Scholar]
- Stowe, L.; Davis, P.A.; McClain, E.P. Scientific basis and initial evaluation of the CLAVR-1 global clear/cloud classification algorithm for the Advanced Very High Resolution Radiometer. J. Atmos. Ocean. Technol. 1999, 16, 656–681. [Google Scholar] [CrossRef]
- Donlon, C.; Minnett, P.J.; Gentemann, C.; Nightingale, T.J.; Barton, I.; Ward, B.; Murray, M.J. Toward improved validation of satellite sea surface skin temperature measurements for climate research. J. Clim. 2002, 15, 353–369. [Google Scholar] [CrossRef] [Green Version]
- Saux Picart, S. EUMETSAT OSI SAF Algorithms Theoretical Basis Document for the Low Earth Orbiter Sea Surface Temperature Processing, Version 1.8; SAF/OSI/CDOP3/MF/SCI/216; EUMETSAT OSI SAF: France, 2020; p. 25. [Google Scholar]
- Govekar, P.; Griffin, C.; Beggs, H. Ingesting SLSTR SST into IMOS Multi-sensor SST Composites, Extended abstract. In Proceedings of the GHRSST XXI Science Team Meeting, Virtual, 1–4 June 2020; pp. 127–132. [Google Scholar] [CrossRef]
- Minnet, P.J. The Validation of Sea Surface Temperature Retrievals; Chapter 14; Springer: Berlin/Heidelberg, Germany, 2010; pp. 229–247. ISBN 978-90-481-8680-8. [Google Scholar]
- O’Carroll, A.G.; Eyre, J.; Saunders, R. Three way error analysis between AATSR, AMSR-E and in situ sea surface temperature observations. J. Atmos. Ocean. Technol. 2008, 25, 1197–1207. [Google Scholar] [CrossRef] [Green Version]
- Ignatov, A.; Stroup, J.D.; Kihai, Y.; Petrenko, B.; Dash, P.; Sapper, J.F. GHRSST v2 Level 3U Global Skin Sea Surface Temperature from the Visible Infrared Imaging Radiometer Suite (VIIRS) on the Suomi NPP Satellite Created by the NOAA Advanced Clear-Sky Processor for Ocean (ACSPO) (GDS Version 2); NOAA National Centres for Environmental Information: Washington, DC, USA, 2015. [Google Scholar] [CrossRef]
- Minnet, P.J.; Evans, R.H. SST from VIIRS on NPP: Prelaunch preparations and post launch validation. In Proceedings of the NASA SST Science Team Meeting, Miami Beach, FL, USA, 2–4 November 2010. [Google Scholar]
- Cracknell, A.P. The Advanced Very High Resolution Radiometer; Tailor and Francis: Abingdon, UK, 1997; p. 13. ISBN 0-7484-0209-8. [Google Scholar]
- IMOS fv02 1-Day Daytime L3C SST Data from AVHRR and VIIRS Sensors. Available online: https://dapds00.nci.org.au/thredds/catalog/qm43/ghrsst/v02.0fv02/Continental/L3C-01day/day/catalog.html (accessed on 19 April 2022).
- IMOS fv02 1-Day Night-Time L3C SST Data from AVHRR and VIIRS Sensors. Available online: https://dapds00.nci.org.au/thredds/catalog/qm43/ghrsst/v02.0fv02/Continental/L3C-01day/night/catalog.html (accessed on 19 April 2022).
- Xu, F.; Ignatov, A. In situ SST quality monitor (iQuam). J. Atmos. Ocean. Technol. 2014, 31, 164–180. [Google Scholar] [CrossRef]
- IMOS fv02 1-Day Night-Time AVHRR-Only L3S SST Data. Available online: https://dapds00.nci.org.au/thredds/catalog/qm43/ghrsst/v02.0fv02/Continental/L3S-01day/night/catalog.html (accessed on 19 April 2022).
- IMOS fv02 1-Day Night-Time Multi-Sensor L3S SST Data. Available online: http://thredds.aodn.org.au/thredds/catalog/IMOS/SRS/SST/ghrsst/L3SM-1d/ngt/catalog.html (accessed on 19 April 2022).
- Beggs, H.; Griffin, C.; Brassington, G.; Govekar, P. Measuring coastal upwelling using IMOS Himawari-8 and Multi-Sensor SST. In Proceedings of the ACOMO 2018 Workshop, Canberra, Australia, 9–11 October 2018. [Google Scholar]
- Hoegh-Guldberg, O.; Hoegh-Guldberg, H. Great Barrier Reef 2050 Implications of Climate Change for the Australia’S Great Barrier Reef; World Wildlife Fund Australia: Sydney, Australia, 2004. [Google Scholar]
- Richards, Z.; Day, J.C. Biodiversity of the Great Barrier Reef-how adequately is it protected? PeerJ 2018, 6, e4747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eakin, C.; Liu, G.; Gomez, A.; Cour, J.L.; Heron, S.; Skirving, W.J.; Geiger, E.F.; Tirak, K.V.; Strong, A.E. Global Coral Bleaching 20142017: Status and an Appeal for Observations. Reef Encount. 2016, 43, 20–26. [Google Scholar]
- Curnock, M.; Marshall, N.; Thiault, L.; Heron, S.; Hoey, J.; Williams, G.; Taylor, B.; Pert, P.; Goldberg, J. Shifts in tourists’ sentiments and climate risk perceptions following mass coral bleaching of the Great Barrier Reef. Nat. Clim. Chang. 2019, 9, 535–541. [Google Scholar] [CrossRef]
- Ainsworth, T.D.; Heron, S.F.; Ortiz, J.C.; Mumby, P.J.; Grech, A.; Ogawa, D.; Leggat, C.M. Climate change disables coral bleaching protection on the Great Barrier Reef. Science 2016, 352, 338–342. [Google Scholar] [CrossRef] [Green Version]
- Hughes, T.P.; Kerry, J.T.; Lvarez Noriega, M.; Lvarez-Romero, J.G.; Anderson, K.; Baird, A.; Babcock, R.; Beger, M.; Bellwood, D.; Berkelmans, R.; et al. Global warming and recurrent mass bleaching of corals. Nature 2017, 543, 373–377. [Google Scholar] [CrossRef]
- Brodnicke, O.; Bourne, D.; Heron, S.; Pears, R.; Stella, J.; Smith, H.; Willis, B. Unravelling the links between heat stress, bleaching and disease: Fate of tabular corals following a combined disease and bleaching event. Coral Reefs 2019, 38, 591–603. [Google Scholar] [CrossRef]
- Holbrook, N.; Gupta, A.; Oliver, E.; Hobday, A.J.; Benthuysen, J.A.; Scannell, H.A.; Smale, D.A.; Wernberg, T. Keeping pace with marine heatwaves. Nat. Rev. Earth Environ. 2020, 1, 482–493. [Google Scholar] [CrossRef]
- Lumpkin, R.; Zgkmen, T.; Centurioni, L. Advances in the application of surface drifters. Annu. Rev. Mar. Sci. 2017, 9, 59–81. [Google Scholar] [CrossRef] [Green Version]
- Lumpkin, R.; Maximenko, N.; Pazos, M. Evaluating Where and Why Drifters Die. J. Atmos. Ocean. Technol. 2012, 29, 300–308. [Google Scholar] [CrossRef]
- Benthuysen, J.A.; Tonin, H.; Brinkman, R.; Herzfeld, M.; Steinberg, C. Intrusive upwelling in the Central Great Barrier Reef. J. Geophys. Res. 2016, 121, 8395–8416. [Google Scholar] [CrossRef]
- Zhu, X. Coastal Shallow Water Diurnal Warming. Ph.D. Thesis, University of Miami, Coral Gables, FL, USA, 2015. [Google Scholar]
- Liu, G.; Heron, S.F.; Eakin, C.M.; Muller-Karger, F.E.; Vega-Rodriguez, M.; Guild, L.S.; De La Cour, J.L.; Geiger, E.F.; Skirving, W.J.; Burgess, T.F.R.; et al. Reef-scale thermal stress monitoring of coral ecosystems: New 5-km global products from NOAA Coral Reef Watch. Remote Sens. 2014, 6, 11579–11606. [Google Scholar] [CrossRef] [Green Version]
- Maturi, E.; Harris, A.; Mittaz, J.; Sapper, J.; Wick, G.; Zhu, X.; Dash, P.; Koner, P. A New High-Resolution Sea Surface Temperature Blended Analysis. Bull. Am. Meteorol. Soc. 2017, 98, 1015–1026. [Google Scholar] [CrossRef]
- Skirving, W.; Marsh, B.; Cour, J.D.L.; Liu, G.; Harris, A.; Maturi, E.; Geiger, E.; Eakin, C.M. CoralTemp and the Coral Reef Watch Coral Bleaching Heat Stress Product Suite Version 3.1. Remote Sens. 2020, 12, 3856. [Google Scholar] [CrossRef]
- GHRSST Level 4 NOAA/OSPO Global Night-Time Geo-Polar Blended Sea Surface Temperature Foundation Temperature. Ver. 1.0. PO.DAAC, CA, USA. Available online: https://www.ncei.noaa.gov/access/metadata/landing-page/bin/iso?id=gov.noaa.nodc:GHRSST-Geo_Polar_Blended_Night-OSPO-L4-GLOB (accessed on 19 April 2022). [CrossRef]
- Govekar, P.; Mittaz, J.; Griffin, C.; Beggs, H. Himawari-8 and Multi-sensor sea surface temperature products and their applications. In Proceedings of the GHRSST XXII Science Team Meeting, Virtual, 7–11 June 2021. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | fv01 | fv02 |
|---|---|---|
| SST retrieval | Regression, fixed coefficients tuned over the first 2 years of platform operation. Separate algorithms for day and night with a large number of terms. | Regression, adaptive coefficients tuned over a rolling 2-year window, updated monthly. Separate standard algorithms for day and night as well as a three-channel unified day and night algorithm. |
| SSES generation | Lookup table based on a 60-day rolling window for NOAA-11 to 19 platforms. | Modelled using a one-year rolling window, updated every five days for NOAA 11–19 platforms. |
| Time coverage | 1 January 2019 to present. Coverage may be incomplete over some periods, although the L3S daily composites form a close to complete record. | 2 January 1992 to the end of the most recent batch process. Coverage is complete up to navigation and reception issues and subject to the availability of data from all Australian reception stations, from NOAA-11, 12, 14, 15, 16, 17, 18, 19. |
| Spatial coverage | Includes reception from Australian continental reception stations for NOAA-18,19 and full domain coverage from N20, NPP and MetOp-B satellites. | Includes reception from both continental and Antarctic stations for NOAA-11, 12, 14, 15, 16, 17, 18, 19. Coverage is enhanced over time periods where earlier and later platforms overlap. Spatial coverage has been enhanced in recent years from fully global SST data from N20, NPP, MetOp-A and MetOp-B satellites. |
| Platform coverage | Currently covers NOAA-18, NPP, N20, MetOp-B | NOAA-11, 12, 14, 15, 16, 17, 18, 19, 20, MetOp-A, MetOp-B and NPP. For any given date, all retrievals from the relevant set of active platforms are included in composite L3S files. |
| Fields | sea_surface_temperature, quality_level, sst_dtime, dt_analysis, wind_speed, wind_speed_dtime_from_sst, sea_ice_fraction, sea_ice_fraction_dtime_from_sst, l2p_flags, satellite_zenith_angle, sses_bias, sses_standard_deviation, sses_count | sea_surface_temperature, sea_surface_temperature_day_night, quality_level, sst_dtime, dt_analysis, wind_speed, wind_speed_dtime_from_sst, sea_ice_fraction, sea_ice_fraction_dtime_from_sst, l2p_flags, satellite_zenith_angle, sses_bias, sses_standard_deviation, sses_count, sses_quality_level |
| Metadata | Default, but tends to be inconsistent in some comment fields. | Default |
| AVHRR | VIIRS | |
|---|---|---|
| −0.2614 | −0.227 | |
| 0.23 | 0.20 |
| Platform | Period |
|---|---|
| NOAA-18 | 1 January 2012 to 31 December 2020 |
| NOAA-19 | 1 January 2012 to 3 September 2018 |
| NPP | 1 March 2012 to 31 December 2020 |
| N20 | 6 June 2018 to 31 December 2020 |
| MetOp-A | 1 January 2012 to 19 January 2016 |
| MetOp-B | 20 January 2016 to 31 December 2020 |
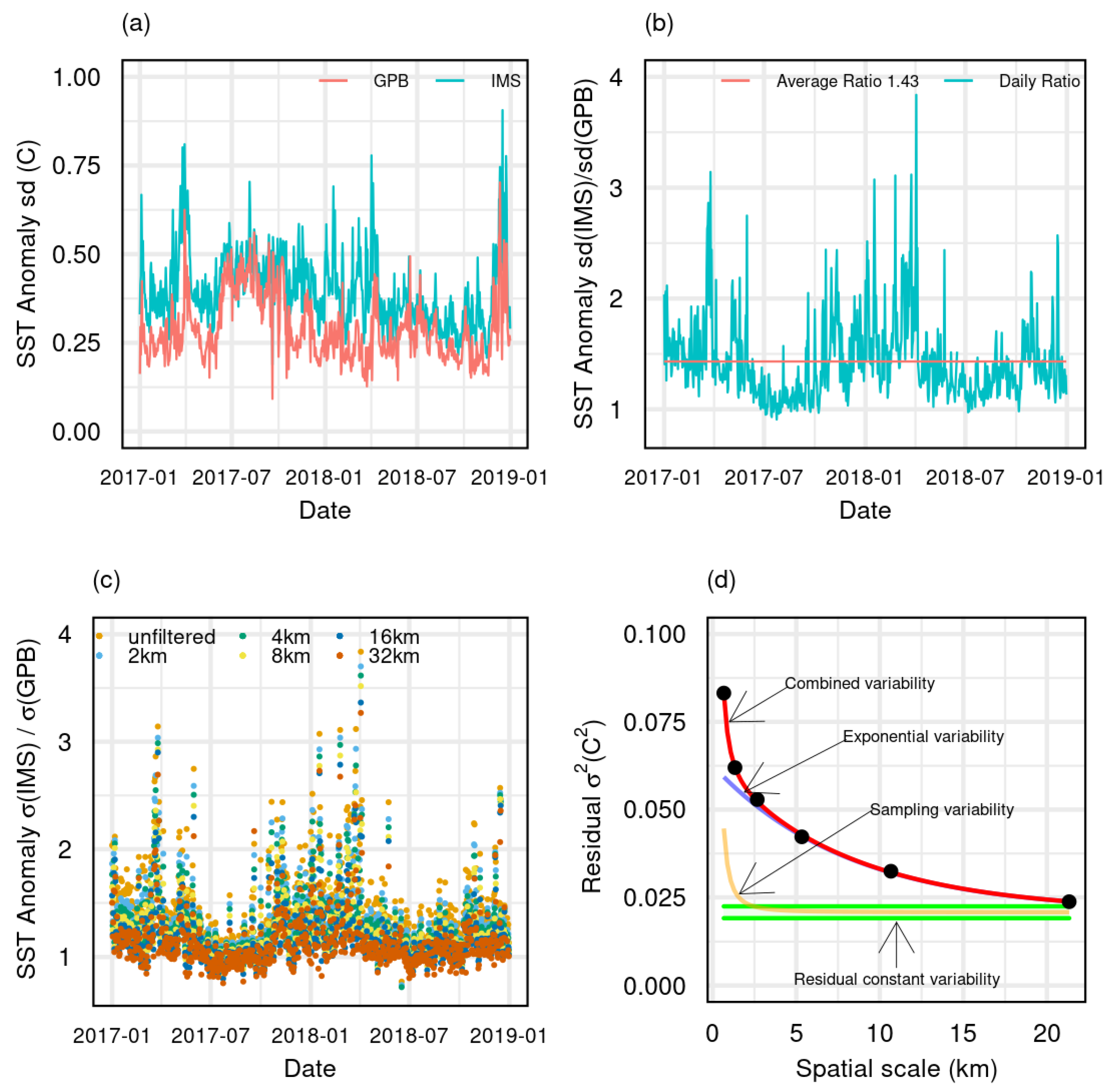
| Average Spatial Scale n (km) | Fitted Linear Coefficient | Fitted Constant Coefficient |
|---|---|---|
| 0.67 | 0.94 ± 0.04 | 0.083 ± 0.005 |
| 1.33 | 0.93 ± 0.04 | 0.062 ± 0.004 |
| 2.67 | 0.93 ± 0.04 | 0.053 ± 0.004 |
| 5.33 | 0.92 ± 0.03 | 0.042 ± 0.004 |
| 10.7 | 0.91 ± 0.03 | 0.032 ± 0.003 |
| 21.3 | 0.89 ± 0.03 | 0.024 ± 0.003 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Govekar, P.D.; Griffin, C.; Beggs, H. Multi-Sensor Sea Surface Temperature Products from the Australian Bureau of Meteorology. Remote Sens. 2022, 14, 3785. https://doi.org/10.3390/rs14153785
Govekar PD, Griffin C, Beggs H. Multi-Sensor Sea Surface Temperature Products from the Australian Bureau of Meteorology. Remote Sensing. 2022; 14(15):3785. https://doi.org/10.3390/rs14153785
Chicago/Turabian StyleGovekar, Pallavi Devidas, Christopher Griffin, and Helen Beggs. 2022. "Multi-Sensor Sea Surface Temperature Products from the Australian Bureau of Meteorology" Remote Sensing 14, no. 15: 3785. https://doi.org/10.3390/rs14153785
APA StyleGovekar, P. D., Griffin, C., & Beggs, H. (2022). Multi-Sensor Sea Surface Temperature Products from the Australian Bureau of Meteorology. Remote Sensing, 14(15), 3785. https://doi.org/10.3390/rs14153785