
GNSS Storm Nowcasting Demonstrator for Bulgaria

 , ,
, ,
Abstract
:1. Introduction
2. Data and Methods
2.1. Real-time GNSS Data Processing
2.2. NWP Simulations
2.3. Classification Function
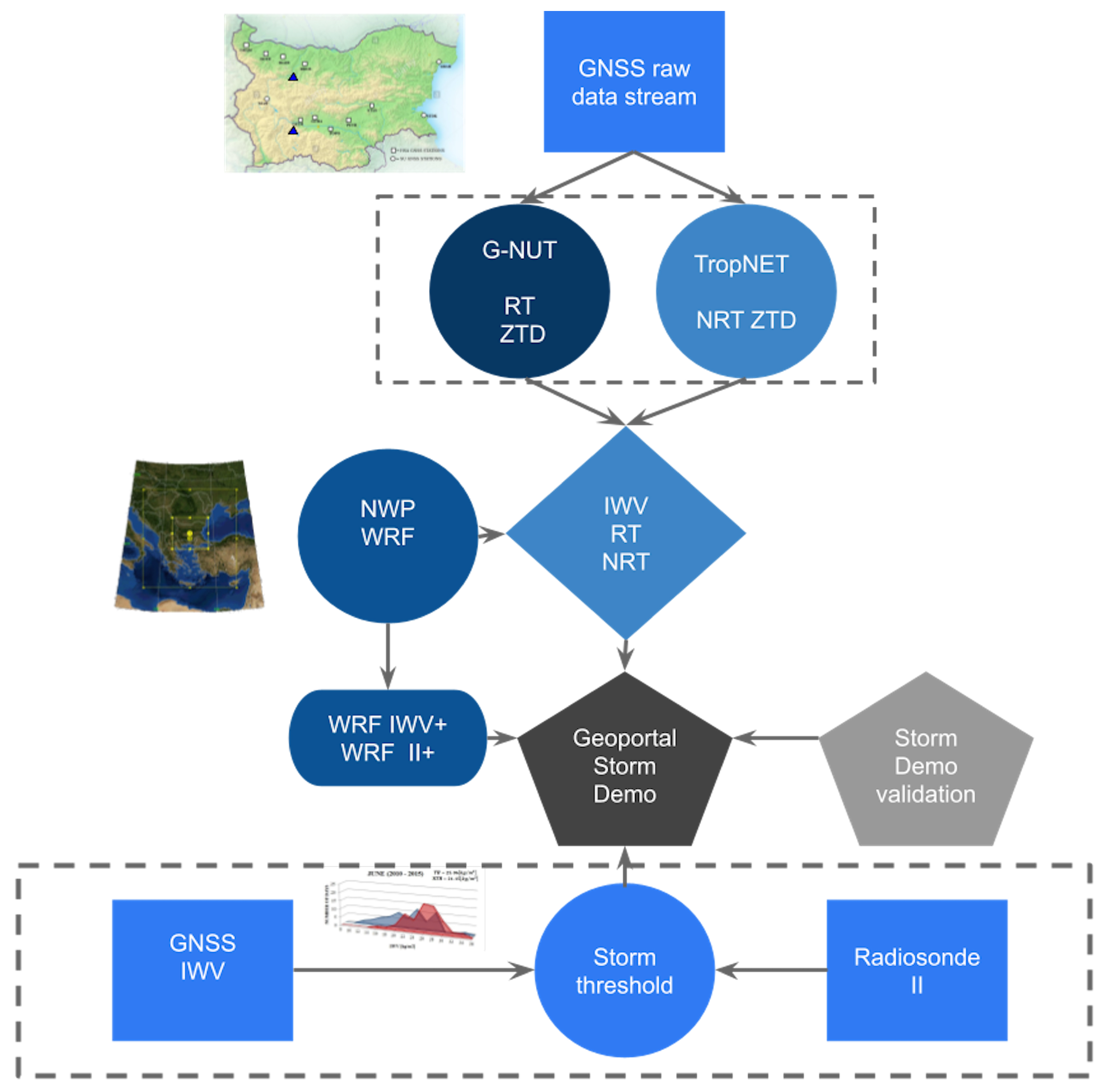
2.4. GNSS Webportal Set-Up
3. Results
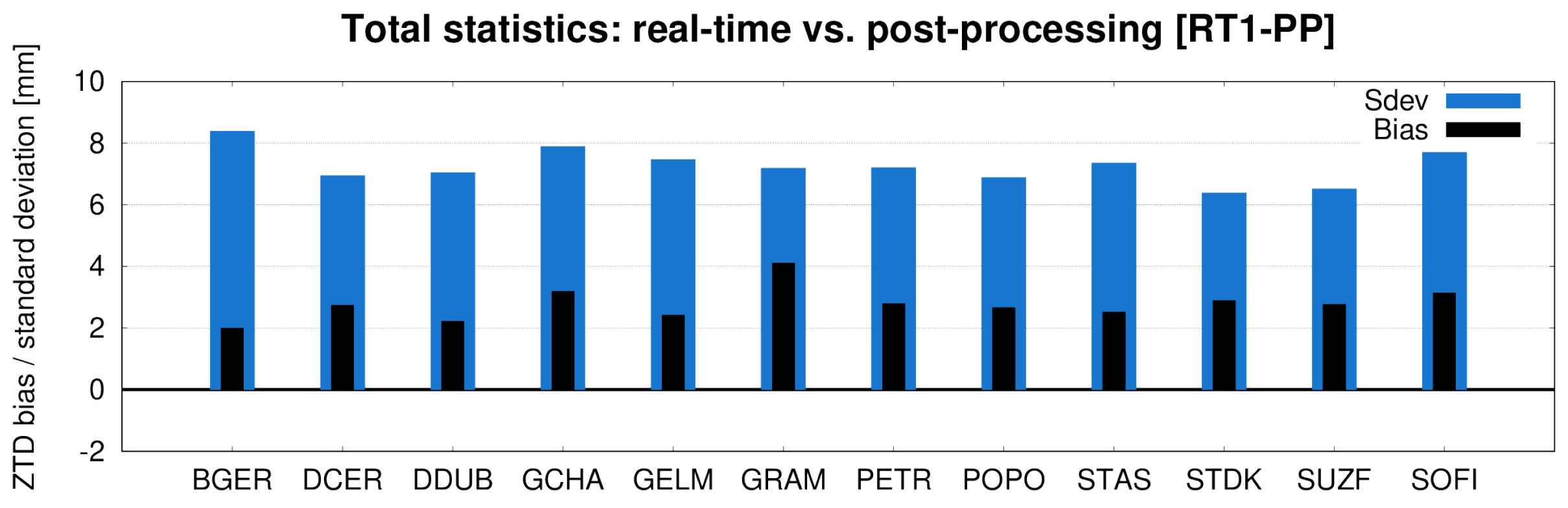
3.1. Real-Time Processing Evaluation: May–September 2021
3.2. IWV from WRF and RT GNSS: May–September 2021
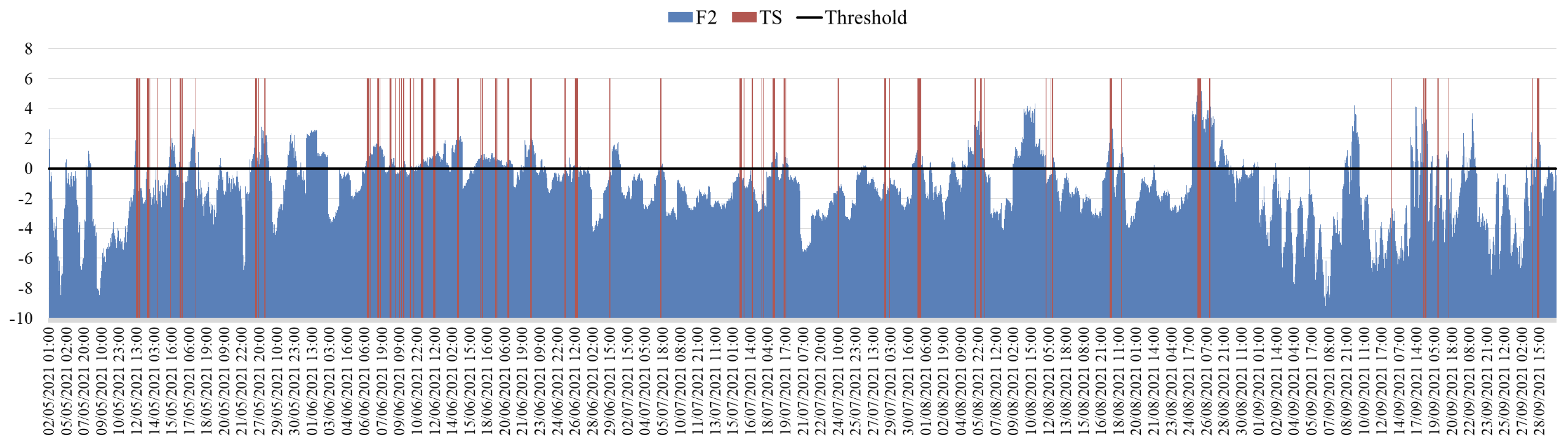
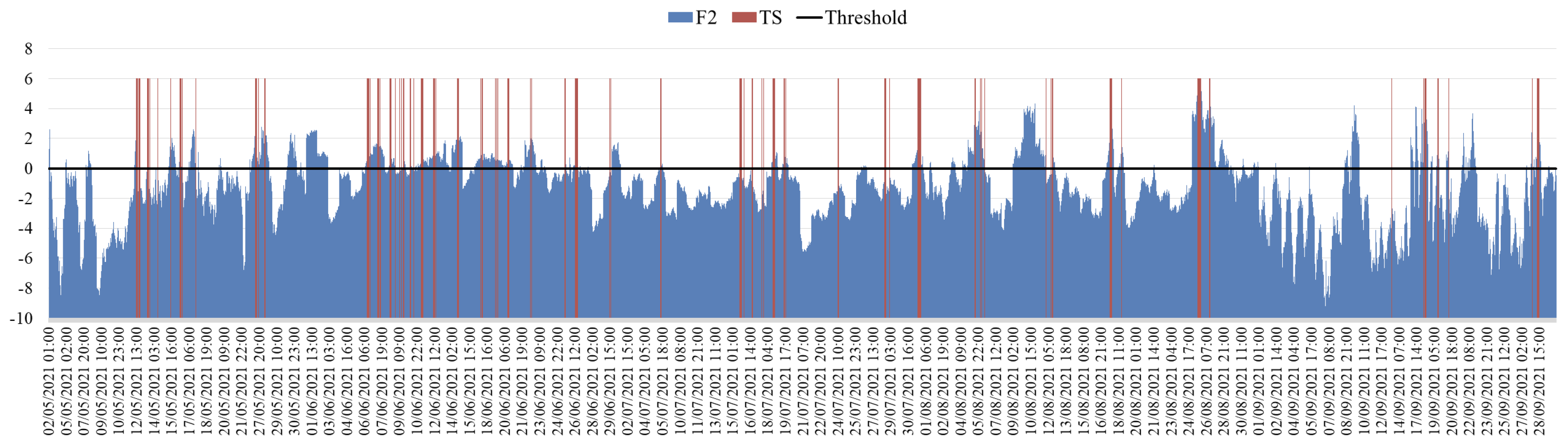
3.3. Thunderstorm Classification Function for Sofia Plana
3.4. Case Study—Hail storm 28–29 August 2021
3.4.1. IWV and Radar Reflectivity
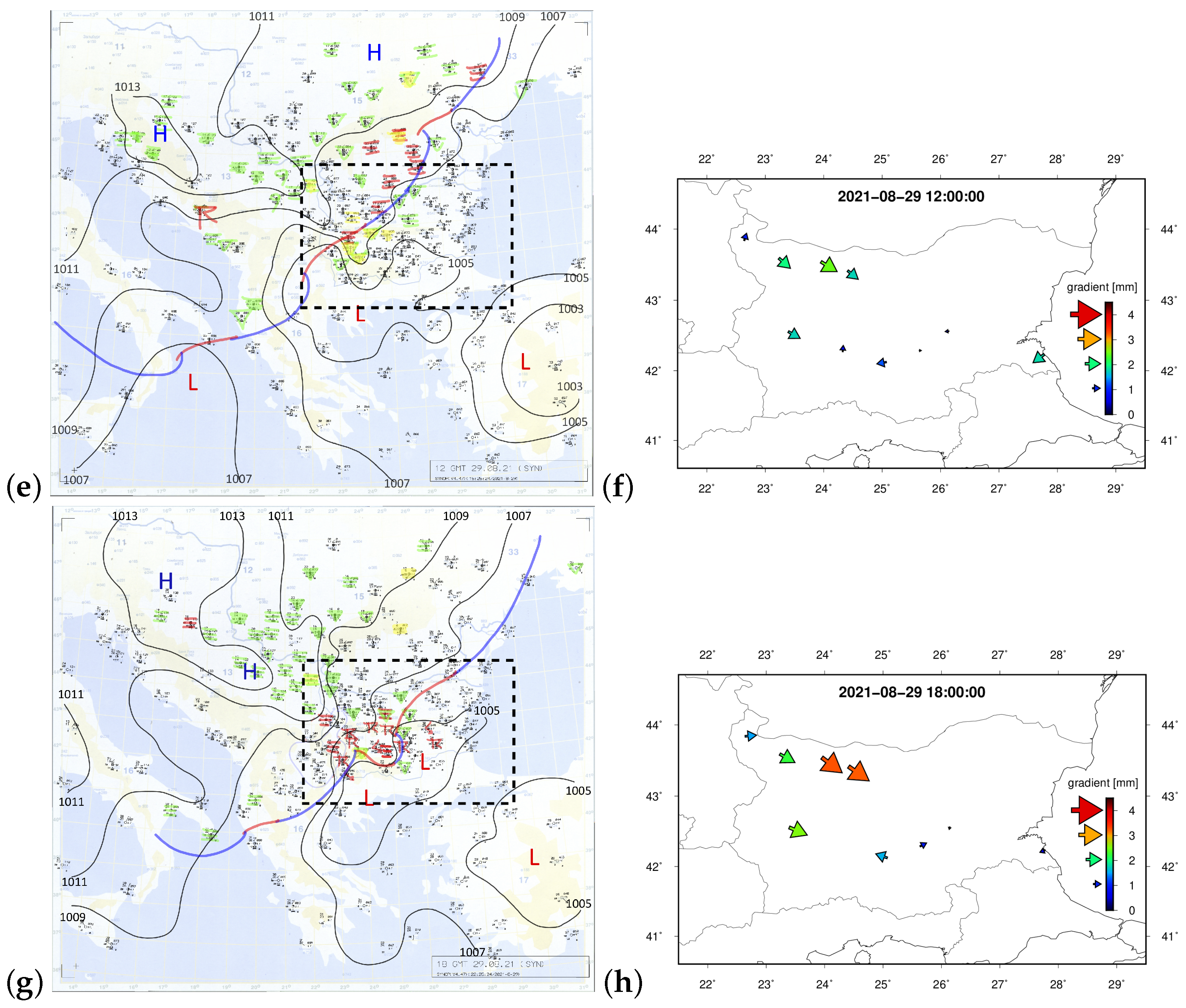
3.4.2. ZTD Gradients: 28–29 August
3.5. Storm Demo Web Portal 20–31 August 2021
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- WMO. Guidelines for Nowcasting Techniques; Technical Report; World Meteorological Organization: Geneva, Switzerland, 2017; ISBN 978-92-63-11198-2. [Google Scholar]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Teunissen, P.J. Carrier phase integer ambiguity resolution. In Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017; pp. 661–685. [Google Scholar]
- Caissy, M.; Agrotis, L.; Weber, G.; Hernandez-Pajares, M.; Hugentobler, U. Innovation: Comming Soon: The International GNSS Real-Time Service. GPS World 2012, 23, 52. [Google Scholar]
- Douša, J.; Václavovic, P.; Zhao, L.; Kačmařík, M. New Adaptable All-in-One Strategy for Estimating Advanced Tropospheric Parameters and Using Real-Time Orbits and Clocks. Remote Sens. 2018, 10, 232. [Google Scholar] [CrossRef]
- Douša, J.; Dick, G.; Kačmařík, M.; Brožková, R.; Zus, F.; Brenot, H.; Stoycheva, A.; Möller, G.; Kaplon, J. Benchmark campaign and case study episode in central Europe for development and assessment of advanced GNSS tropospheric models and products. Atmos. Meas. Tech. 2016, 9, 2989–3008. [Google Scholar] [CrossRef]
- Václavovic, P.; Douš, J.; Györi, G. G-Nut software library - state of development and first results. Acta Geodynynamica Geomater. 2013, 10, 431–436. [Google Scholar] [CrossRef]
- Douša, J.; Bennitt, G. Estimation and evaluation of hourly updated global GPS Zenith Total Delays over ten months. GPS Solut. 2013, 17, 453–464. [Google Scholar] [CrossRef]
- Bocheva, L.; Dimitrova, T.; Penchev, R.; Gospodinov, I.; Simeonov, P. Severe convective supercell outbreak over western Bulgaria on July 8, 2014. Idojárás 2018, 122, 177–203. [Google Scholar] [CrossRef]
- Guerova, G.; Dimitrova, T.; Georgiev, S. Thunderstorm Classification Functions Based on Instability Indices and GNSS IWV for the Sofia Plain. Remote Sens. 2019, 11, 2988. [Google Scholar] [CrossRef]
- Guerova, G.; Jones, J.; Douša, J.; Dick, G.; de Haan, S.; Pottiaux, E.; Bock, O.; Pacione, R.; Elgered, G.; Vedel, H.; et al. Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe. Atmos. Meas. Tech. 2016, 9, 5385–5406. [Google Scholar] [CrossRef]
- Kačmařík, M.; Douša, J.; Zus, F.; Václavovic, P.; Balidakis, K.; Dick, G.; Wickert, J. Sensitivity of GNSS tropospheric gradients to processing options. Ann. Geophys. Discuss. 2018, 2018, 1–19. [Google Scholar] [CrossRef]
- Kačmařík, M.; Douša, J.; Dick, G.; Zus, F.; Brenot, H.; Möller, G.; Pottiaux, E.; Kapłon, J.; Hordyniec, P.; Václavovic, P.; et al. Inter-technique validation of tropospheric slant total delays. Atmos. Meas. Tech. 2017, 10, 2183–2208. [Google Scholar] [CrossRef]
- Václavovic, P.; Douš, J. Backward smoothing for precise GNSS applications. Adv. Space Res. 2015, 56, 1627–1634. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric Correction for the Troposphere and Stratosphere in Radio Ranging of Satellites. Geophys. Monogr. 1972, 15, 247–252. [Google Scholar]
- Boehm, J.; Heinkelmann, R.; Schuh, H. Short note: A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, 4. [Google Scholar] [CrossRef]
- Chen, G.; Herring, T. Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J. Geophys. Res. Solid Earth 1997, 102, 20489–20502. [Google Scholar] [CrossRef]
- Petite, G.; Luzum, B. IERS Conventions; Technical Report; IERS Technical Notes; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean. Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Huang, X.Y.; Wang, W.; Powers, J. A Description of the Advanced Research WRF Version 3; NCAR: Boulder, CO, USA, 2008; Available online: https://opensky.ucar.edu/islandora/object/technotes:500 (accessed on 6 December 2016).
- Guerova, G.; Dimitrova, T.; Vassileva, K.; Slavchev, M.; Stoev, K.; Georgiev, S. BalkanMed real time severe weather service: Progress and prospects in Bulgaria. Adv. Space Res. 2020, 66, 2844–2853. [Google Scholar] [CrossRef]
- Guerova, G.; Simeonov, T.; Yordanova, N. The Sofia University Atmospheric Data Archive (SUADA). Atmos. Meas. Tech. 2014, 7, 2683–2694. [Google Scholar] [CrossRef]
- Davis, J.; Herring, T.; Shapiro, I.; Rogers, A.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS Meteorology: Remote Sensing of Atmospheric Water Vapour Using the Global Positioning System. J. Geophys. Res. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Thayer, G.D. An improved equation for the radio refractive index of air. Radio Sci. 1974, 9, 803–807. [Google Scholar] [CrossRef]
- Sissenwine, N.; Dubin, M.; Wexler, H. The U.S. Standard Atmosphere, 1962. J. Geophys. Res. 1962, 67, 3627–3630. [Google Scholar] [CrossRef]
- NIMH. Monthly Hydrometeorological Bulletin; Technical Report; NIMH: Sofia, Bulgaria, August 2021; ISSN 2815-2743. [Google Scholar]
- Benevides, P.; Catalao, J.; Miranda, P. On the inclusion of GPS precipitable water vapour in the nowcasting of rainfall. Nat. Hazards Earth Syst. Sci. 2015, 15, 2605–2616. [Google Scholar] [CrossRef]
- Łoś, M.; Smolak, K.; Guerova, G.; Rohm, W. GNSS-based machine learning storm nowcasting. Remote Sens. 2020, 12, 2536. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processing Strategy | Real-Time Solution | Reference Solution |
|---|---|---|
| Data sampling rate | 10 s | 30 s |
| ZTD product latency | 15 min (maximum) | 15 days (minimum) |
| Station coordinates | Estimated continuously | Estimated day by day |
| Satellite orbits and clocks | IGS real-time | IGS finals |
| Processing mode | Continuous forward filter | Day-to-day forward filter and backward smoother |
| Processing method | Precise Point Positioning | |
| Parameter estimator | Square root filter | |
| GNSS observations | Undifferenced code+phase IF observations | |
| Observation weighing | 1/sin(elevation), code = 100 * phase | |
| Elevation angle cut-off | 7 degrees | |
| ZTD sampling rate | 5 min | |
| Receiver clocks | Estimated continuously with a white noise | |
| Satellite clocks | Introduced consistently to precise orbits | |
| Phase ambiguities | Float values estimated simultaneously to ZTDs | |
| Ionosphere | The first order eliminated in IF combination | |
| A priori troposphere | Saastamoinen hydrostatic model [15] supported with the atmospheric pressure from the GPT model [16] | |
| Estimated troposphere | ZWD and horizontal gradients estimated using random walks of 3.0 and 0.3 mm/sqrt(hour), respectively | |
| Mapping function | GMF hydrostatic and wet mapping function [17], and gradient mapping function [18] | |
| Antenna phase center | Receiver/satellite IGS14 antenna type offsets and variations | |
| Solid earth tides | IERS2010 model [19] | |
| Ocean tide loading | FES2004 model [20] | |
| Station Name | 28 August 2021 | 29 August 2021 |
|---|---|---|
| Gelemenovo | 0.62 | 0.34 |
| Popovitsa | 0.56 | 0.14 |
| Petrovo | 1.04 | 0.53 |
| Staro selo | 0.63 | 0.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerova, G.; Douša, J.; Dimitrova, T.; Stoycheva, A.; Václavovic, P.; Penov, N. GNSS Storm Nowcasting Demonstrator for Bulgaria. Remote Sens. 2022, 14, 3746. https://doi.org/10.3390/rs14153746
Guerova G, Douša J, Dimitrova T, Stoycheva A, Václavovic P, Penov N. GNSS Storm Nowcasting Demonstrator for Bulgaria. Remote Sensing. 2022; 14(15):3746. https://doi.org/10.3390/rs14153746
Chicago/Turabian StyleGuerova, Guergana, Jan Douša, Tsvetelina Dimitrova, Anastasiya Stoycheva, Pavel Václavovic, and Nikolay Penov. 2022. "GNSS Storm Nowcasting Demonstrator for Bulgaria" Remote Sensing 14, no. 15: 3746. https://doi.org/10.3390/rs14153746
APA StyleGuerova, G., Douša, J., Dimitrova, T., Stoycheva, A., Václavovic, P., & Penov, N. (2022). GNSS Storm Nowcasting Demonstrator for Bulgaria. Remote Sensing, 14(15), 3746. https://doi.org/10.3390/rs14153746