
Real-Time Imaging Processing of Squint Spaceborne SAR with High-Resolution Based on Nonuniform PRI Design



Abstract
:
1. Introduction
2. Range Model and Problem Formulation
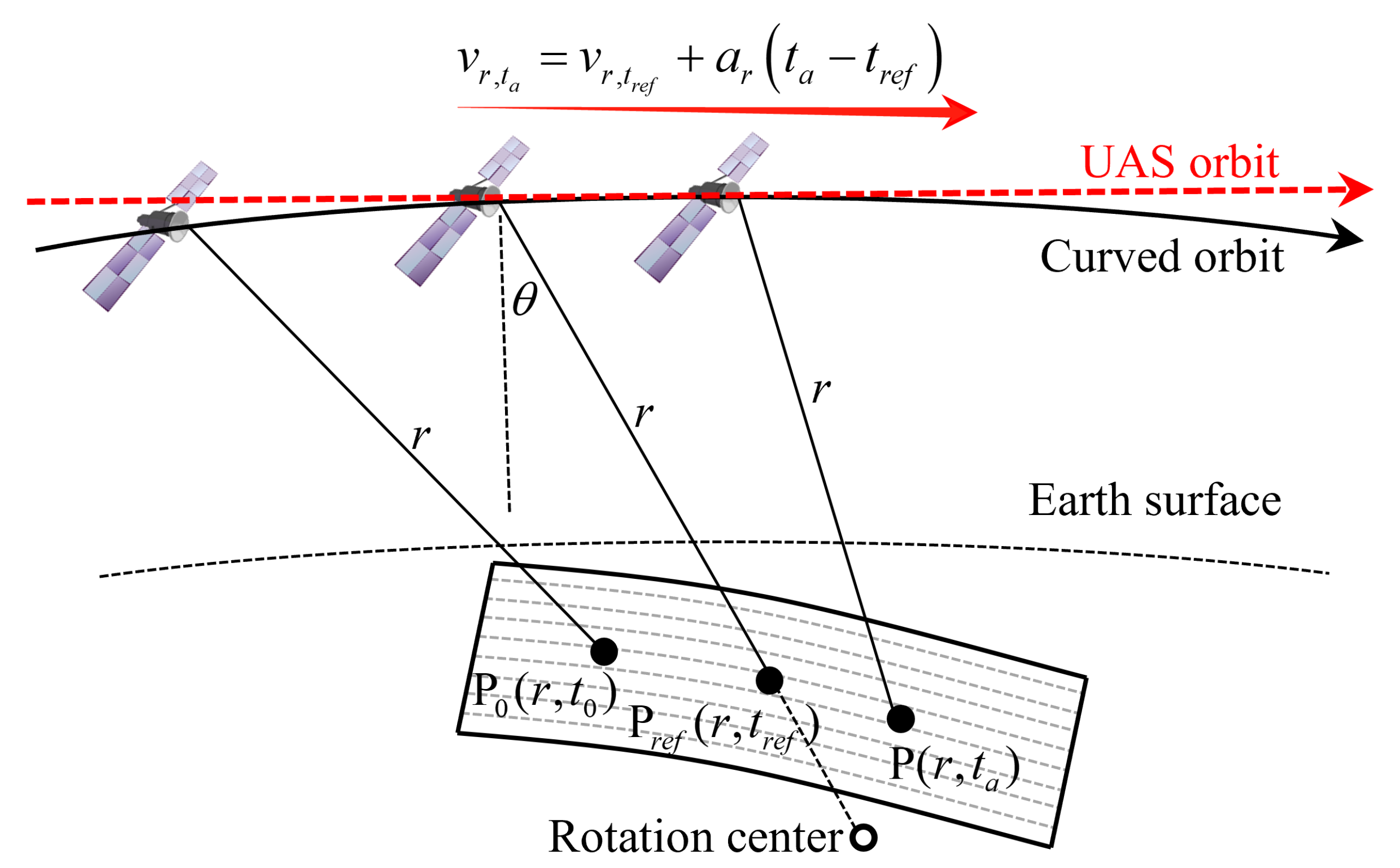
2.1. Range Model
2.2. Problem Formulation
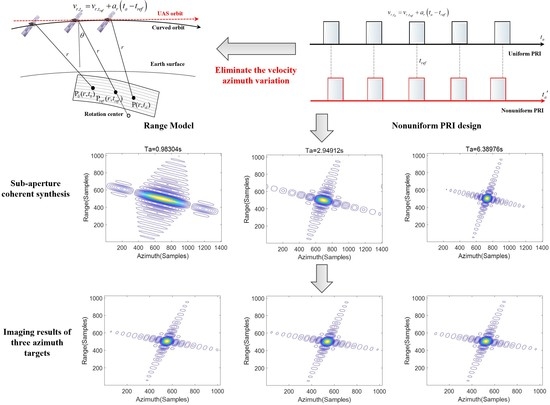
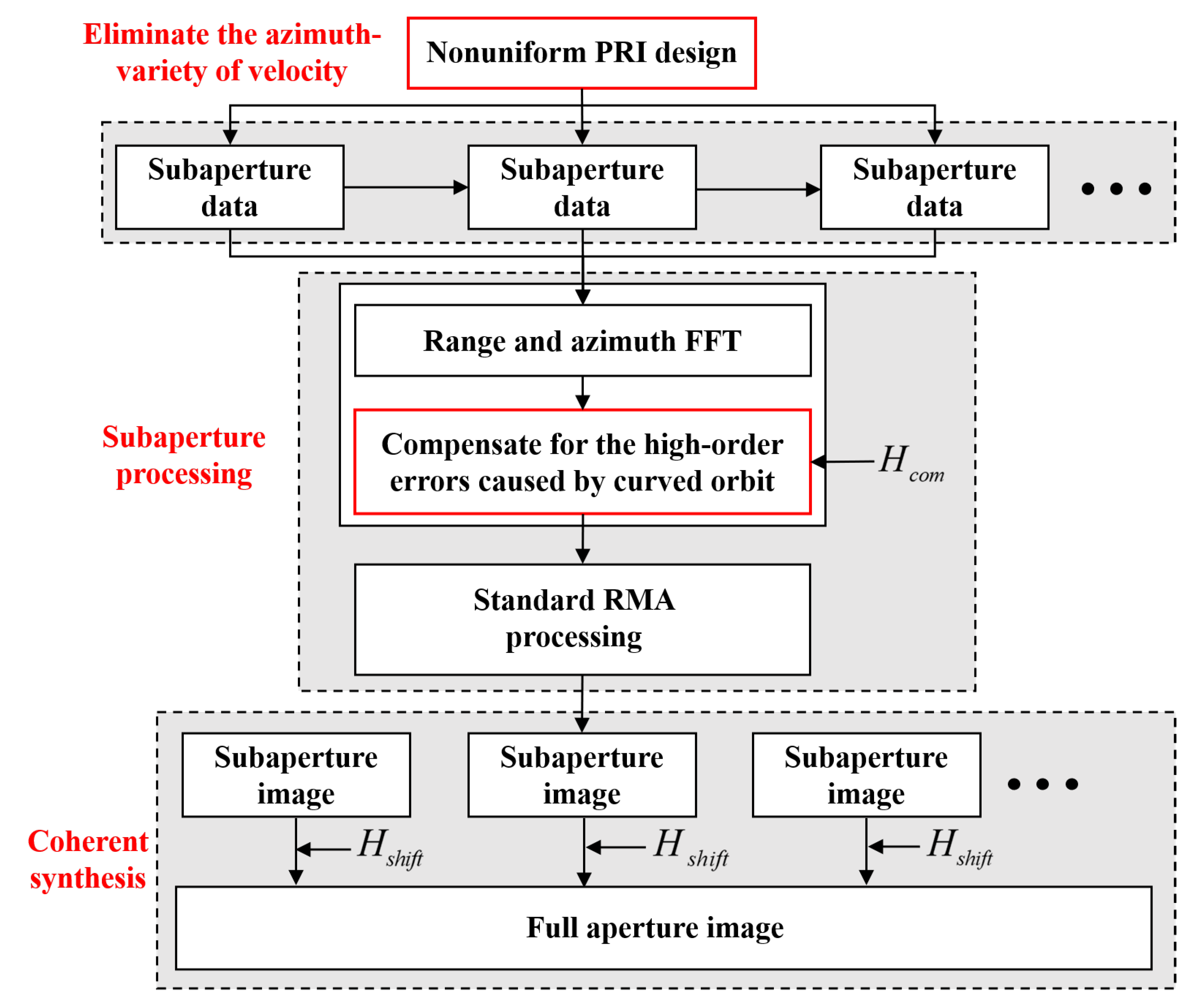
3. Real-Time Imaging Processing Based on Nonuniform PRI Design
3.1. Nonuniform PRI Design
3.2. Subaperture Imaging
3.3. Coherent Synthesis of Subaperture Image
4. Verification by Simulated Results
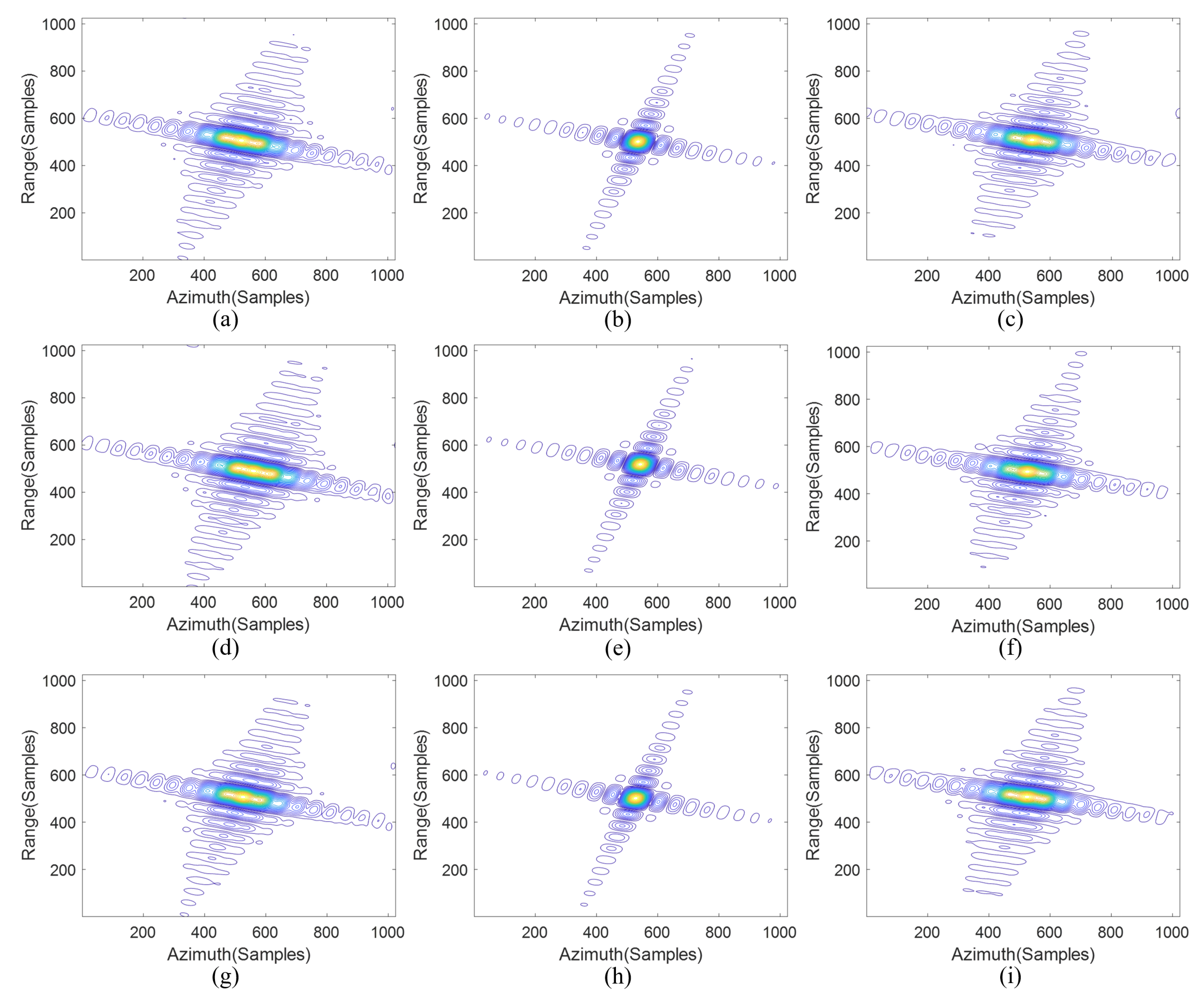
4.1. Verification of Subaperture Coherent Synthesis
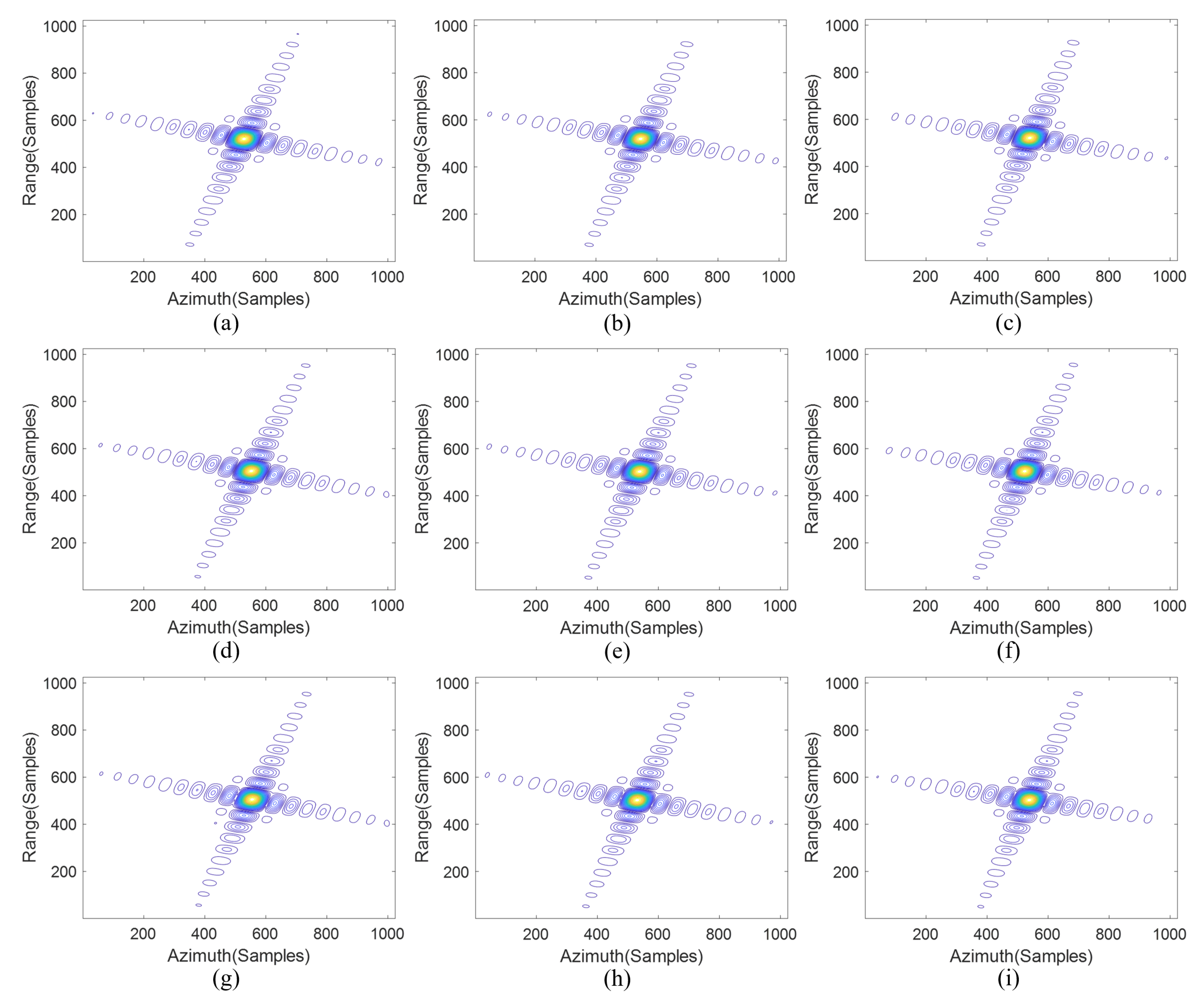
4.2. Verification of Full Scene Image
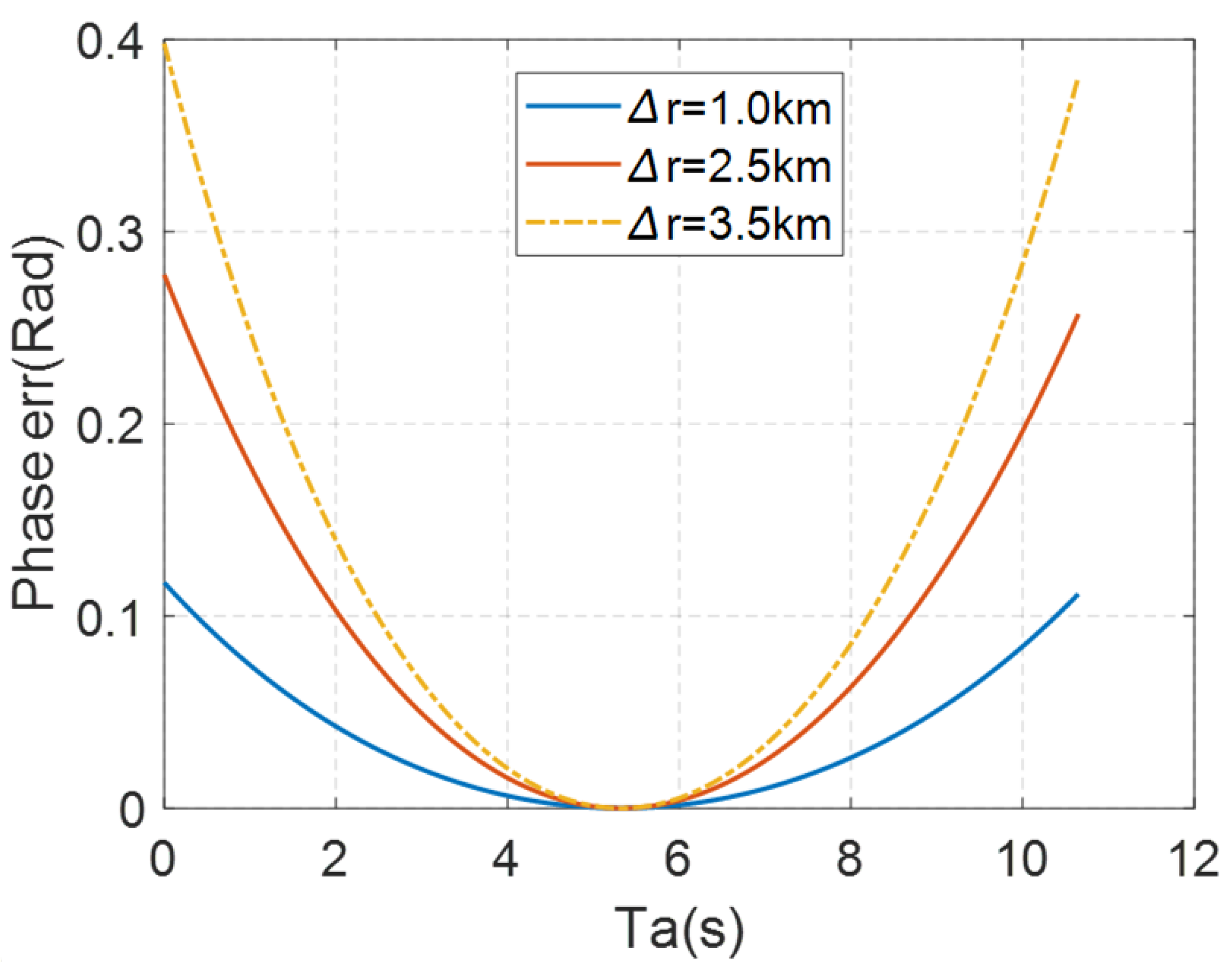
4.3. Quantification of Approximation Influence for High-Order Terms
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kazuo, O. Recent Trend and Advance of Synthetic Aperture Radar with Selected Topics. Remote Sens. 2013, 5, 716–807. [Google Scholar]
- Tao, M.; Su, J.; Huang, Y.; Wang, L. Mitigation of Radio Frequency Interference in Synthetic Aperture Radar Data: Current Status and Future Trends. Remote Sens. 2019, 11, 2438. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Chen, J.; Xing, M.; Yu, H.; Liang, B.; Peng, J.; Sun, G.-C. Motion Compensation/Autofocus in Airborne Synthetic Aperture Radar: A Review. IEEE Geosci. Remote Sens. Mag. 2022, 10, 185–206. [Google Scholar] [CrossRef]
- Jin, Y.; Chen, J.; Xia, X.G.; Liang, B.; Xing, M. Ultrahigh-Resolution Autofocusing for Squint Airborne SAR Based on Cascaded MD-PGA. IEEE Geosci. Remote Sens. Lett. 2021, 99, 1–5. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A Satellite Formation for High-Resolution SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Li, Z.; Liu, Y.; Peng, J.; Mills, J. A New Processing Chain for Real-Time Ground-Based SAR (RT-GBSAR) Deformation Monitoring. Remote Sens. 2019, 11, 2437. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.C.; Liu, Y.; Xiang, J.; Liu, W.; Chen, J. Spaceborne Synthetic Aperture Radar Imaging Algorithms: An Overview. IEEE Geosci. Remote Sens. Mag. 2021, 10, 161–184. [Google Scholar] [CrossRef]
- Raman, B.S.; Moreira, A.; Spielbauer, R.; Franceschetti, G. Real-Time Synthetic Aperture Radar (SAR) Processing for Large Squint Angles; International Society for Optics and Photonics: Rome, Italy, 1994; pp. 2–8. [Google Scholar]
- Jia, G.; Buchroithner, M.; Chang, W.; Li, X. Simplified Real-Time Imaging Flow for High-Resolution FMCW SAR. Remote Sens. 2013, 12, 973–977. [Google Scholar]
- Moreira, A. Real-time synthetic aperture radar (SAR) processing with a new subaperture approach. IEEE Trans. Geosci. Remote Sens. 1992, 30, 714–722. [Google Scholar] [CrossRef]
- Sun, G.C.; Liu, Y.; Xing, M.; Wang, S.; Guo, L.; Yang, J. A Real-Time Imaging Algorithm Based on Sub-Aperture CS-Dechirp for GF3-SAR Data. Sensors 2018, 18, 2562. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Zhang, J.; Jin, Y.; Yu, H.; Yang, D.G. Real-Time Processing of Spaceborne SAR Data with Nonlinear Trajectory Based on Variable PRF. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, J.; Liang, B.; Yang, D. A General Method of Series Reversion for Synthetic Aperture Radar Imaging. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Hu, C. An Improved CS Algorithm Based on the Curved Trajectory in Geosynchronous SAR. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 5, 795–808. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, G.C.; Yang, C.; Yang, J.; Xing, M.; Bao, Z. Processing of Very High Resolution Spaceborne Sliding Spotlight SAR Data Using Velocity Scaling. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1505–1518. [Google Scholar] [CrossRef]
- Wei, X.; Deng, Y.; Huang, P.; Wang, R. Full-Aperture SAR Data Focusing in the Spaceborne Squinted Sliding-Spotlight Mode. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4596–4607. [Google Scholar] [CrossRef]
- Lanari, R.; Zoffoli, S.; Sansosti, E.; Fornaro, G.; Serafino, F. New approach for hybrid strip-map/spotlight SAR data focusing. Radar Sonar Navig. IEE Proc. 2001, 148, 363–372. [Google Scholar] [CrossRef]
- He, F.; Chen, Q.; Dong, Z.; Sun, Z. Processing of Ultrahigh-Resolution Spaceborne Sliding Spotlight SAR Data on Curved Orbit. IEEE Trans. Aeros. Electron. Syst. 2013, 49, 819–839. [Google Scholar] [CrossRef]
- Wang, P.; Liu, W.; Chen, J.; Niu, M.; Yang, W. A High-Order Imaging Algorithm for High-Resolution Spaceborne SAR Based on a Modified Equivalent Squint Range Model. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1225–1235. [Google Scholar] [CrossRef] [Green Version]
- Prats-Iraola, P. On the Processing of Very High Resolution Spaceborne SAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6003–6016. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.C.; Wu, Y.; Yang, J.; Xing, M.; Bao, Z. Full-Aperture Focusing of Very High Resolution Spaceborne-Squinted Sliding Spotlight SAR Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3309–3321. [Google Scholar] [CrossRef]
- Eldhuset, K. A new fourth-order processing algorithm for spaceborne SAR. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 824–835. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Zhao, B.; Han, X.; Wang, R.; Song, H.; Deng, Y. A Novel High-Order Range Model and Imaging Approach for High-Resolution LEO SAR. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3473–3485. [Google Scholar] [CrossRef]
- Yi, T.; He, Z.; He, F.; Dong, Z.; Manqing, W. Generalized Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Imaging. Sensors 2017, 17, 2568. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, C.; He, M. A Generalized Chirp-Scaling Algorithm for Geosynchronous Orbit SAR Staring Observations. Sensors 2017, 17, 1058. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, G.; Xing, M.; Zhang, L.; Bao, Z. Robust Autofocusing Approach for Highly Squinted SAR Imagery Using the Extended Wavenumber Algorithm. Sensors 2013, 51, 5031–5046. [Google Scholar]
- Yang, J.; Sun, G.; Xing, M.; Xia, X.; Liang, Y.; Bao, Z. Squinted TOPS SAR Imaging Based on Modified Range Migration Algorithm and Spectral Analysis. IEEE Geosci. Remote Sens. Lett. 2017, 11, 1707–1711. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Orbit height | 514 km |
| Semi-major axis | 6885 km |
| Orbit eccentricity | 0.0011 |
| Argument of perigee | 97.44 |
| Ascending node | 260 |
| Orbit inclination | 97.44 |
| Parameters | Value |
|---|---|
| Carrrier frequency | 9.65 GHz |
| Chirp bandwidth | 500 MHz |
| Working mode | Sliding spotlight |
| Squint angle | 15 |
| Observation time | 10.6496 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Y.; Liang, B.; Chen, J.; Xiong, Y.; Xiong, M. Real-Time Imaging Processing of Squint Spaceborne SAR with High-Resolution Based on Nonuniform PRI Design. Remote Sens. 2022, 14, 3725. https://doi.org/10.3390/rs14153725
Jin Y, Liang B, Chen J, Xiong Y, Xiong M. Real-Time Imaging Processing of Squint Spaceborne SAR with High-Resolution Based on Nonuniform PRI Design. Remote Sensing. 2022; 14(15):3725. https://doi.org/10.3390/rs14153725
Chicago/Turabian StyleJin, Yanghao, Buge Liang, Jianlai Chen, Yi Xiong, and Mingyao Xiong. 2022. "Real-Time Imaging Processing of Squint Spaceborne SAR with High-Resolution Based on Nonuniform PRI Design" Remote Sensing 14, no. 15: 3725. https://doi.org/10.3390/rs14153725
APA StyleJin, Y., Liang, B., Chen, J., Xiong, Y., & Xiong, M. (2022). Real-Time Imaging Processing of Squint Spaceborne SAR with High-Resolution Based on Nonuniform PRI Design. Remote Sensing, 14(15), 3725. https://doi.org/10.3390/rs14153725