1. Introduction
The automatic identification system is a key innovation in navigation safety, implemented from 2002 to 2008. The aim of the system implementation was to streamline the ship movement observation, which was earlier conducted by radar with an Automatic Radar Plotting Aid (ARPA). Communication in the AIS system is effected between ships, coastal and satellite infrastructure (AIS-SAT), and navigation aids (ATON). The information transfer between AIS transponders is effected wirelessly in the VHF band. Information from devices (parts of the navigation equipment on a ship or an unmanned vehicle) is the source of the digital data exchange. These devices include a positioning system receiver, a gyrocompass, and a rate-of-turn (ROT) indicator, required in ships with a gross capacity in excess of 50,000 tons. All of the devices are connected with a wire with an AIS transponder, which is responsible for the accumulation of data and transmission of compressed data via a digital radio connection with the Time Division Multiple Access (TDMA) technique.
AIS has some flaws, just like any other system. One issue is the limitation of the availability of service provided by the AIS system, manifesting as the occurrence of incomplete data from navigation equipment. According to the Technical Recommendation for the AIS system—ITU-R.M-1371—issued by the International Telecommunication Union (ITU), incomplete data are acceptable when input data are not sent to the AIS transponder. Incomplete data were marked with the “default” parameter. Such incomplete data in an AIS message result in the absence of complete information on a vessel equipped with an AIS transponder for the system users receiving AIS data over the radio. Availability of the AIS system is also important for recording voyage data by the voyage data recorder (VDR). AIS information is one of the types of data recorded by the system. In the event of a shipping failure, when the VDR is damaged and with its working AIS transponder, it is possible to recover the voyage data of a vessel in distress based on AIS data recorded by the VDR of a vessel situated at a distance not greater than the AIS radio range.
Exploitation parameters of navigation systems are crucial. Navigation system performance is measured through the following indicators: accuracy, availability, continuity, and integrity [
1,
2]. Reliability [
3], as well as characteristics of reliability origin, such as availability [
4] and continuity [
5] considered with regard to different levels of radio navigational systems structures, seem to be one of the major directions to be investigated in the field of navigation. In general, the quality status of a modern navigation system is described by a set of characteristics derived from uniformly evaluated parameters, which should enable the unambiguous system benchmark.
The issue of proper operation of the AIS has been addressed by the International Maritime Organization (IMO) and the International Association of Lighthouse Authorities (IALA). Concerning enhancing safety, this produced a new “e-Navigation” concept, which was intended to ensure the availability, continuity, and reliability of data from the AIS service. Moreover, there are multiple studies published by scientists in research institutions and technical universities on the AIS availability and reliability. A review of the AIS service availability testing methods was presented in [
6], whereas the current AIS availability status is presented in [
7].
The findings of studies on the initial period of the AIS system operation are found in [
8,
9,
10]. The beginning of AIS (before 2014) marked a period of poor AIS data quality, which has been, for example, noted in the study published by [
11]. It indicated the inconsistencies of data, e.g., vague or incorrect AIS entries for destinations. Felski and Jaskolski [
12] discussed the completeness and integrity of AIS data in collision avoidance with data from 2006 to 2007 and 2010 to 2012. The findings suggested a high level of dynamic data integrity of AIS.
The research results indicate the unavailability of the AIS service concerning the occurrence of incomplete data at the AIS system implementation stage. A high percentage of incomplete data on the heading (HDG) and rate of turn (ROT) can also be observed. The frequency of the occurrence of incomplete data for the other dynamic parameters: course over ground (COG), speed over ground (SOG), and geographic coordinates is much lower. This is particularly noticeable in sea areas, except in anchoring areas and harbors. Research teams of the German Cosmonautics and Aeronautics Agency (DLR) and Naval Academy (PNA) in Gdynia conducted a joint study to analyze the AIS service availability as the daily frequency of incomplete AIS data occurrence in the Bay of Gdańsk [
9].
With additional GPS satellites launched in 2014, the AIS data availability is slightly improved. However, there is still a debate on the correctness of static data in AIS as they are manually input. Lensu and Goerlandt [
13] stated that the AIS stream is vulnerable and may contain considerably erroneous data. Therefore, it should be crossly checked against other information apart from just the checksum, which suggests an idea of the elaboration of some algorithms of data verifications. In that period, nobody was interested in taking GPS errors into account, which are the source of serious problems nowadays.
This study is motivated by the constantly growing problem of spoofing and jamming GPS systems, which has been observed over recent years. This can generate the absence of AIS transmission from the ships or transmissions of wrong data, which are not coherent with the other data. These problems create difficulties for ships’ watch officers and troubles in practices of services such as Vessel Traffic Services or Government Agencies such as the Coast Guard etc. A similar issue characterizes analyzing data transmitted via Satellite AIS when gaps between received messages are in hours [
14].
The AIS service availability as a feature applicable to determining data age and determining moments of AIS proper operation and failures based on incomplete navigation parameters requires verification and a critical approach to earlier studies. Therefore, the following thesis was put forward:
The frequency of incomplete data occurrence can be determined within any time interval, which can be defined by the time to repair (TTR), by indexing data streams based on the MMSI, which are responsible for the service’s limited availability status.
The results of the MTTR (Mean Time to Repair) tests for five navigation parameters can be presented in the frequency domain by applying the fast Fourier transform (FFT).
This paper aims to develop an AIS availability model based on an estimate of the MTTR for 261 tests of 21,600 s—6 h—each. This issue refers to short-term operation system characteristics, as opposed to the methodology presented in [
9,
15], where the limiting value of the service availability was determined based on 56 week-long measurement sessions—recording data in the years 2006–2007, 2010–2012 by Polish Naval Academy (PNA) in Gdynia. The research approach shown in chapter 2 was proposed to estimate the AIS service availability. The application of spectral analysis for the duration of the AIS system downtime and presentation of MTTR in the frequency domain is a new study approach in the theory of navigation system reliability, which has not yet been presented.
2. Materials and Methods
2.1. Preliminary Assumptions for Testing Data Stream Availability in the AIS Service
Dynamic information in the AIS system is contained in position reports, i.e., messages No. 1, 2, and 3 when class A transponders are installed in SOLAS cargo ships. A stream of dynamic data present in position reports is indexed with the Maritime Mobile Service Identity (MMSI). If incomplete data appear in an AIS message in a single data stream indexed with MMSI, then the ITU-R.M.1371 system technical specification recommends that these data should be marked with default values. Default values are used when the actual navigation parameters are unavailable. The system technical specification [
16] recommends that the default values listed in
Table 1 should be used if the data are incomplete.
If incomplete data provided in
Table 1 appear in an AIS message, the AIS service availability should be regarded as restricted by a single, incomplete data stream indexed with the MMSI. Each object equipped with a class A AIS transporter sends position reports indexed with the MMSI at an interval of 2 to 180 s and will be regarded as an independent data stream. The number of data streams will be defined by the number of vessels equipped with a class A AIS transponder being within range of an AIS radio receiver coupled with a data recorder. Streams of dynamic data, indexed with the MMSI, which may contain incomplete dynamic data, were used to estimate the AIS service availability. The presence of incomplete data substantially extends the data age, which has a significant impact on the AIS service availability and increases the time to repair (TTR), which, together with streams of data indexed with MMSI, will be used to determine the mean time to repair (MTTR) and the AIS service availability index A(t).
2.2. AIS Service Availability Based on Dynamic Data Age
A failure of the navigation system can be regarded as a state when the system does not fulfill the assumed requirements as intended. This means that a system failure can be regarded as a state resulting from damage to its internal or external elements, such as damage to the radio connection (a high noise-to-signal ratio). A service failure is a state in which the data age can be equivalent to the occurrence of incomplete data in AIS position reports indexed with the MMSI. This system state can be called TTR (Time To Repair) [
17]. According to [
18], mean TTR can be applied to estimate the service availability. The availability can be estimated using the availability coefficient
A, which is the ratio of the mean time when the system is available and the whole time is taken into account for the service.
where:
—mean time between failures;
—mean time to repair.
If one considers the navigation structure of the system as an object that performs the set tasks in time, then the process of the system exploitation consists of the alternating periods of the object worthiness,
understood as periods of proper operation and periods of unworthiness
η1,
η2,
η3, …
ηn, understood as periods of repair (renewal). Moments
are called moments of the system failure, whereas moments
are called moments of the system repair [
9]. It was assumed that time periods
and
are independent, positive random variables with a known probability distribution. The state of operation is assigned to binary 1. The state of failure is assigned to binary 0. The state of failure 0 means the extended age of dynamic data resulting from the reception of incomplete data in a position report. The service available for each navigation parameter HDG, ROT, POS, COG, and SOG is determined by the TTR for each stream of data indexed with MMSI. This can be used as the basis for determining the MTTR for each navigation parameter indexed separately with the MMSI. A set
of data streams can be used as the basis for determining the MTTR for five navigation parameters—the main components of position reports. The age of data for recorded navigation parameters is the interval between successive received position reports. The navigation parameter under examination: HDG, ROT, SOG, or COG, contains complete data [
16] consistent with those in
Table 2.
A graphic presentation of the AIS service availability [
19] for a single navigation parameter
p = 1 and for
streams of data indexed with the MMSI is shown in
Figure 1.
where:
Tn—operation time,
ηn—downtime,
X(t)—stochastic process,
t′r—moments of system failure,
t″r—moments of system repair.
Values of
MTBF for a single navigation parameter (
p) and a single data stream (
m) indexed with the
MMSI are calculated from the following equation:
The
MTTR will be calculated from the following formula:
Assuming that, at any moment, the AIS system structure should involve the presence of
independent streams of data indexed by the
MMSI, then
of the system will be:
where:
—mean time to repair for streams of data indexed by the MMSI for the selected navigation parameter.
The MTTR and MTBF can be equated with the expected downtime and the expected time between system failures,
E()—expected value of the state of operation,
E()—expected value of the state of failure.
In this case, the service availability is determined from the formula:
Moreover, the service availability can be determined as the probability of events from the formula:
The AIS system availability can refer to the interval of successively received navigation parameters p contained in messages indexed by the MMSI in the system operation area. Availability is represented by its boundary value, defined as the availability coefficient—
A, calculated from the formula:
where:
is the service availability parameter determined by the expected value of the random variable
T, called the mean time between service failures.
2.3. AIS Service Availability Structure—Defining the Study Object
The AIS service availability structure can be defined by employing the interval between two successively received position reports (message No. 1), i.e., the age of data indexed with the MMSI. Data indexed with the MMSI as a single data stream are used to determine the TTR at any time. The MTTR is determined with the age of incomplete data as an expected downtime calculated for
data streams for
navigation parameters. This will decide on the status in which the object is at any time
. A reliability model as a two-state stochastic process
,
, is adopted for two-state objects in the reliability state. It was assumed originally that
would be a binary representation of the process availability.
where:
—two-state stochastic process;
State X(t) = 1 means that the age of dynamic data of the navigation parameter p indexed by the MMSI at time t is smaller than or equal to 10 s if the speed was greater than or equal to 3 knots, or smaller than or equal to 180 s if the speed was less than 3 knots. For a 6-h interval = 21,600 s, E() ≥ 20,520 s. The system is in the state of operation (worthiness).
State X(t) = 0 means that the age of dynamic data for navigation parameters indexed with the MMSI at time t is greater than 10 s if the speed was greater than or equal to 3 knots or greater than 180 s if the speed was smaller than 3 knots. For a 6-h interval = 21,600 s, E() > 1080 s. The system is in a state of failure (unworthiness).
The proposed structure of the service availability based on the TTR quantization process in 6-h samples allows for classifying the system service to a specific state of availability. The sampling time referring to the service state takes into account a previous test, which demonstrated a low frequency of occurrence of incomplete dynamic data (
Figure 2).
The preliminary plan assumed an estimation of availability at one-minute intervals. Due to a high level of dynamic data service availability, a further study was carried out with a 6-h interval.
2.4. AIS Dynamic Data Received from Class A Devices
A single navigation message sends five navigation parameters, which can be recorded as a vector
.
where:
—HDG—heading,
—ROT—rate of turn,
—COG—course over ground,
—SOG—speed over ground,
—POS—latitude and longitude (WGS-84).
Dynamic data are indexed according to the MMSI number assigned to each AIS device. Therefore, the function structure of the received AIS dynamic messages
has the following form:
where:
—the index which defines the number of data streams marked with the MMSI number.
Assuming that the navigation parameters for vector
are independent, the probability of receiving incomplete data can be described with the following equation:
where:
—probability of the system service being in the state of 0—state of unworthiness,
—probability of the system service being in the state of 1—state of worthiness,
—probability of receiving complete data in a position report message,
—probability of receiving incomplete data in a position report message.
Reception of the navigation parameter
p of set
P in m data streams of set M, indexed with the MMSI, can be defined by the data set
.
Therefore, the reception of information from set
for
p = {1…
P} of navigation parameter from
data streams have the following form:
Assuming that the number of navigation parameters under examination is p = 5, the service availability will be determined separately for each parameter, based on data from m streams indexed with the MMSI with a 6-h interval.
Data from the AIS position reports indexed with the MMSI were used to determine the expected downtime E(
) in each stream for each of the navigation parameters of vector
. The AIS service availability for a single stream of dynamic data indexed with the MMSI is shown in
Figure 3.
A graphic presentation of the process of damaging the structure defined as
is shown in
Figure 4.
The TTR for a single navigation parameter determined for m streams of data indexed with the MMSI was used to estimate the MTTR at a defined time t, and the state of the system S {0,1} was determined.
For each navigation parameter, it is possible to determine the frequency of the service failures. This can be done by performing the spectral analysis of TTR in the frequency domain. An analysis of downtime changes in the frequency domain can be shown using the FFT [
20].
This is a process in which the function under study is split into parts. This operation develops the Fourier transformation, which shows a unit impact of divided frequencies on the function under analysis. The transformation is responsible for changing the temporal signal form into frequency characteristics. The operator then receives the periodical and frequency properties of the fragment under study. Therefore, the tool is the basis for analyzing and processing the observed functions. Signal analysis methods in the frequency domain are called frequency or spectral methods. They enable one to more easily characterize the signal parameters compared to temporal methods.
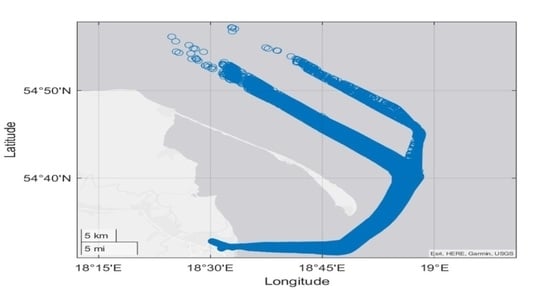
2.5. Apparatus for AIS Dynamic Data Recording
AIS service availability for
p = (1…5) of navigation parameters and
m = (1…
M) of data streams indexed with the MMSI was tested in the Bay of Gdańsk area (
Figure 5).
The recorded data for 251 6-h samples were obtained from a ship anchored in the Gdynia harbor. The AIS transmitting/receiving antenna was placed at an altitude of 14 m above sea level. The data were recorded between 0900–1500 h from 3 January 2020, 0900 CET to 4 January 2021, 1500 CET. After encapsulation, the recorded data were recorded in database files and subsequently, based on the SQL language, queries were entered into the database to filter out the data and to present the filtration results. The TTR determination was based on data from the database with the IB Expert application. The TTR spectral analysis in the frequency domain was performed with the MATLAB application. The data processing algorithm taking into account the registration process, encapsulation, determination of service availability, and spectrum analysis in the frequency domain is presented in
Figure 6.
2.6. Spectral Analysis of the Signal in the Frequency Domain
Prior to starting a spectral analysis of the signal in the frequency domain, MTTR needs to be determined in the first place in accordance with the following relationship (3), (4).
Based on the data processed in this manner, a spectral analysis in the frequency domain for MTTR oscillations was conducted.
For the MTTR oscillations assessment, a spectral analysis method was proposed, i.e., a frequency analysis known as the Fourier Transform. It derived its name from the research process based on determining the frequency of the elements contained in the temporal TTR of the function. Fourier transform describes a signal in the frequency or pulsation domain.
If signal
can be represented by the inverse form of Fourier transform according to the following relationship:
where:
—Fourier transform of the signal
—exponential form of the harmonic wave
Fourier transform of signal
is determined according to the following relationship [
11]:
In contrast to the continuous signal
, MTTR is determined by a discrete signal
. The sampling period for signals of this type is provided by the following relationship [
11]:
where:
i = 0…N − 1.
The mathematical form of the signal is then provided by the following relationship [
11]:
where:
—initial amplitude value;
—signal harmonic component amplitude;
—pulsation of the main signal harmonic component, where r = 1;
—signal harmonic component phase.
Pulsation of the main harmonic signal components, where
r =
is provided with the following relationship [
11]:
The notation (19) of the signal gives the information on what part of the distribution have the particular components in the form of harmonic signals for amplitudes , phases and initial amplitude . The notation is true for odd . For even , has to be in the range of .
The relationship existed between the evenness of the samples. The mathematical notations were presented in odd elements mathematical apparatus.
3. Results
Based on the recorded and processed data, 17,292,899 records and 9408 streams of data indexed with the MMSI, and moments of proper operation and failure of the AIS service were determined. Mean: 66,256 records were received, as well as M = 57 data streams for each sample at 6-h intervals of the AIS device operation. The test was limited to position reports from class A devices in the area delineated by the square with the following coordinates of apices: 54°25′ N 018°28′ E, 54°50′ N 019°00′ E. If an object stayed within this sector for less than 6 h, to calculate the service available from the stream of data indexed with the MMSI, a reference was made to the total time of the object staying within the sector under study, which should not be longer than that declared in the study. The time to repair the AIS service for 6-h intervals for five navigation parameters is shown in
Figure 7.
The mean time between failures is the expected downtime of the AIS service for each p navigation parameter. The calculated TTR is the necessary value for calculating the AIS service availability for the p navigation parameter. The MTTR for COG, and SOG, do not exceed 1000 s for 21,600-s (6-h) samples. The MTTR does not exceed 600 s for POS (geographic longitude and latitude). The highest values were observed in the initial process of AIS data recording. This also applies to the other parameters, i.e., ROT and HDG. However, the minimum TTR = 480 s for HDG and TTR = 360 s for ROT was observed. The maximum TTR for the last two parameters, i.e., ROT and HDG, is 3.5 times higher than for the other parameters. The AIS system service reaches a low unreliability level for the navigation parameters COG, SOG, and POS after 1000 h of recording compared to the initial period of measurement campaigns. This effect was not observed for the HDG or ROT parameter, where the service unreliability is at a constant level.
The frequency of an MTTR result in 6-h samples was presented with the FFT.
Figure 8.
The amplitude spectrum in the frequency domain for COG, POS, and SOG contains frequent changes in MTTR. These navigation parameters are generated by on-deck positioning system receivers, where their reliability is affected by the GPS/GNSS service availability. Interferences in the pseudorandom code transmission between a satellite and the ship restrict the GPS/GNSS service availability while at the same time increasing the TTR for the three navigation parameters of the AIS system. Errors resulting from random interferences of the GPS also compromise the AIS service quality. Harmonics with the maximum amplitude from 45 to 95 s of MTTR are present for low frequencies in the range of (0.001; 0.003 MHz). These values indicate a low occurrence frequency for the data age typical of the main harmonic of the navigation parameter under consideration, i.e., SOG, COG, and POS. Large amplitude oscillations of 10 to 180 s were observed for the navigation parameters: HDG and ROT. The maximum MTTR exceeds 1100; 1300 s, respectively. Outlying values for the main harmonics can be filtered out with a low-cut filter with a finite impulse response (FIR) [
21].
The MTTR and MTBF were determined for p navigation parameters, and m data streams were subsequently used to determine the service availability for each navigation parameter. Following the TTR quantization, the system service was categorized into a specific state from the X(t) set (
Figure 9).
Detailed results of the service quantization for p navigation parameters, with an indication of the total number of transitions between the service states are shown in
Table 3.
Assuming that the system structure element failures are independent, the probability of receiving incomplete data in a position report message for
p navigation parameters and m data streams is:
Therefore, the probability of complete data reception for
p navigation parameters and
m data streams is:
Therefore, the probability of complete data reception for
p navigation parameters and
m data streams is equivalent to the probability that the system is in state 1—worthiness:
4. Discussion
An examination of the AIS system availability confirms the thesis: The frequency of incomplete data occurrence can be determined within any time interval, which can be defined by the TTR. Data streams can be indexed based on MMSI for five navigation parameters. The service availability was examined based on dynamic data referring to moments when incomplete data for navigation parameters were received: HDG, SOG, COG, POS, and ROT. The service availability test results were preceded by an analysis of the MTTR amplitude spectrum in the frequency domain. To this end, FFT was applied. The test results confirmed high service availability for the navigation parameter originating from the GPS/GNSS receiver. Large MTTR oscillations were observed for HDG and ROT parameters, originating mainly from a gyrocompass. Therefore, the data age becomes particularly important, especially since AIS information is applied in the watchkeeping officer’s decision-making support systems, such as ARPA or a portable pilotage support system. The greater the ship velocity, the more important the data topicality.
In reference to the service availability data for 2006, 2008, 2010, and 2011 in the Bay of Gdańsk, the service remains available at the level of 2010 and 2011. The “lines” and “ships” criteria were adopted in the study at the stage of the AIS system implementation on the Polish coast. The “lines” criterion concerned the number of lines with incomplete data for p parameters of dynamic and static information. The “ships” criterion concerned the streams of data indexed with the MMSI with incomplete data for p parameters of dynamic and static information. The results of tests based on the data age for p navigation parameters and m data streams are similar to the results for the “lines” criterion for 2010 and 2011 [
15]. The high intensity of transitions between states presented based on the ROT and HDG data of 2020 arises from short intervals between samples. This is unlike modeling the service available at the system implementation stage, where the AIS system state is quantized based on a one-week sample. The main objective of the study was to apply the FFT to examine the frequency of the occurrence of the service failure determined by MTTR. This objective was accomplished by determining the MTTR amplitude characteristics for five navigation parameters in the frequency domain. The sampling frequency of 1/21,600 Hz was the recording time for a single sample—6 h. Moments of the service failure and MTTR for m data streams and p navigation parameters were determined for each sample. The spectral analysis of MTTR shows the frequency of MTTR occurrence from a sample for 261 6-h samples. The method of MTTR presentation in the frequency domain provides a better picture of the expected MTTR than the results presented in the time domain. Assuming that damage done to the AIS service structure is independent, the AIS service availability was determined, which gives a general insight into the availability of the navigation parameters contained in position reports from class A devices. Unavailability of the AIS service upon the system implementation and incomplete data for p navigation parameters and m data streams is a common phenomenon. The conclusions from independent studies of the AIS service availability are similar. The navigation parameters provided from vessels within the operation range of the vessel’s own AIS system are incomplete, making the vessel state vectors unreliable. To restrict the occurrence of incomplete HDG and ROT data, it is worth connecting the AIS transponder to a gyrocompass and using an independent rate of turn (ROT) measuring device also connected directly to the AIS transponder. Therefore, the information in the position report generated by GPS/GNSS receivers is available, while those whose emission source is a gyrocompass limit the availability of the AIS service.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}