
Theory of Microwave Remote Sensing of Vegetation Effects, SoOp and Rough Soil Surface Backscattering

Abstract
:1. Introduction
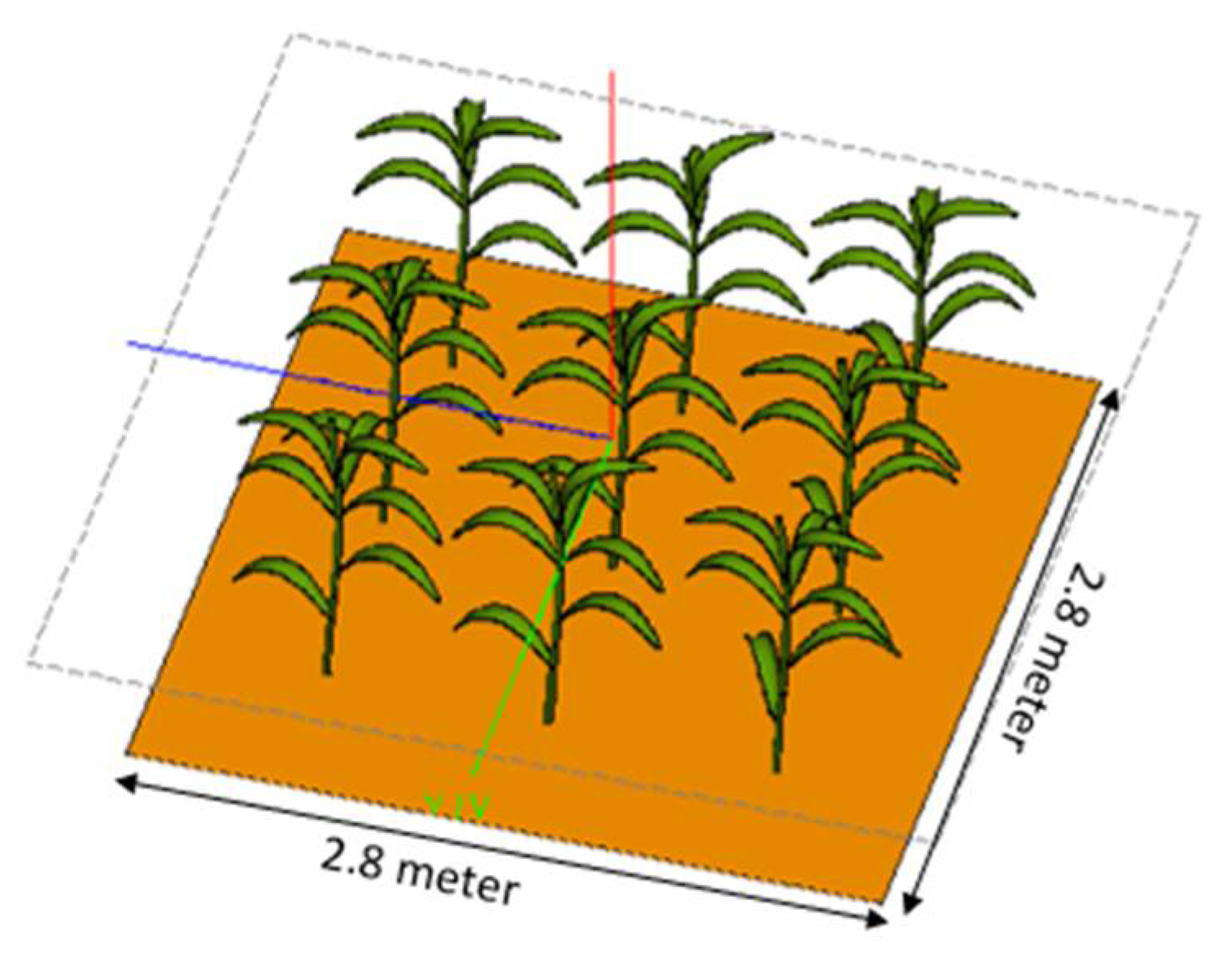
2. Vegetation and Forest Effects in Microwave Remote Sensing of Soil Moisture
2.1. T Matrix of a Plant or a Tree
2.2. Wave Multiple Scattering Theory (W-MST)
2.3. Final Fields
2.3.1. Outside the Enclosing Cylinders
2.3.2. Inside the Enclosing Cylinders
2.4. Rotation and Efficient Use of Re-usable T Matrices
2.5. Computational Efficiency of the Hybrid Method for Statistical Moments of Fields
2.6. Calculations and Validation of T Matrices of A Single Corn Plant Using Commercial Software
2.7. Numerical Results of Hybrid Method of Vegetation Field and Forests
3. Signals of Opportunity
3.1. GNSS-R and SoOp Introduction
3.2. Coherent and Incoherent Models
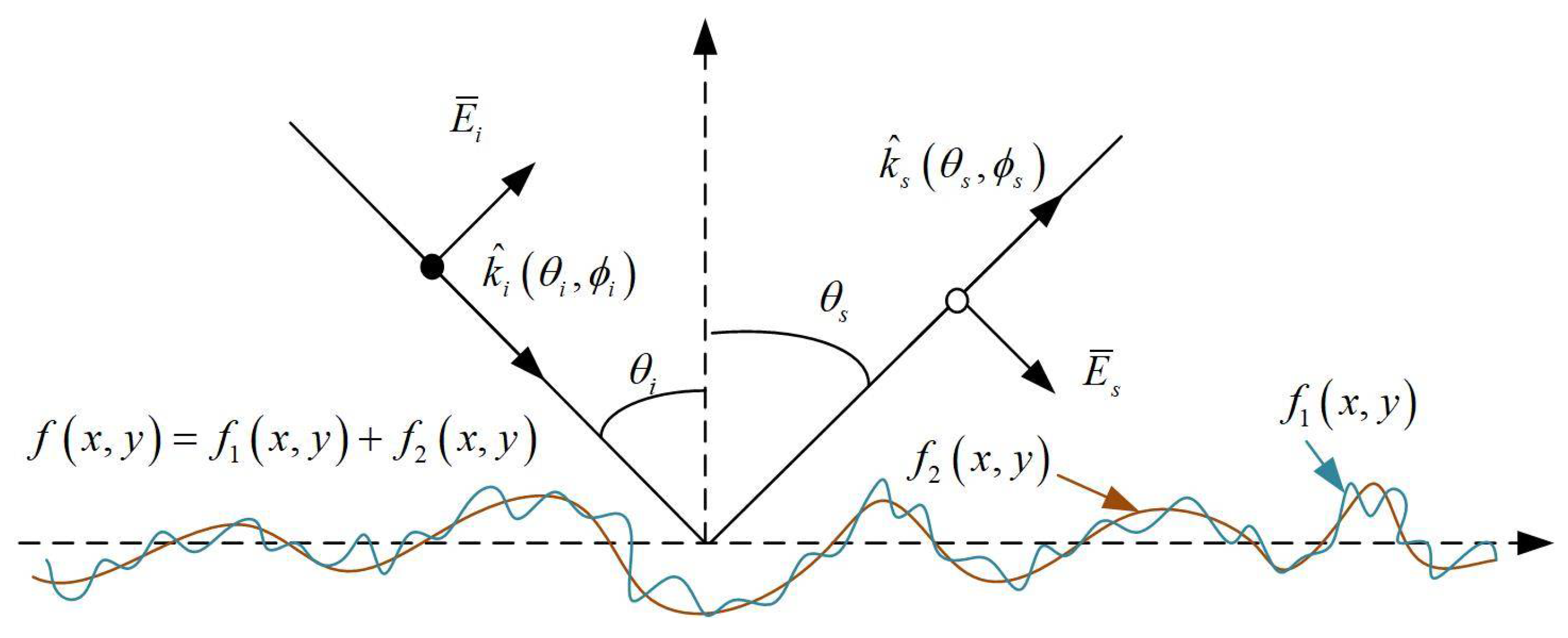
3.3. Geometric Descriptions of SoOp: Topography and Rough Surface
3.4. Numerical Kirchhoff Approach (NKA)
3.5. Analytical Kirchhoff Solutions (AKS)
3.5.1. Multiple DEM Patches
3.5.2. Mean Field
3.5.3. Covariance of Fields
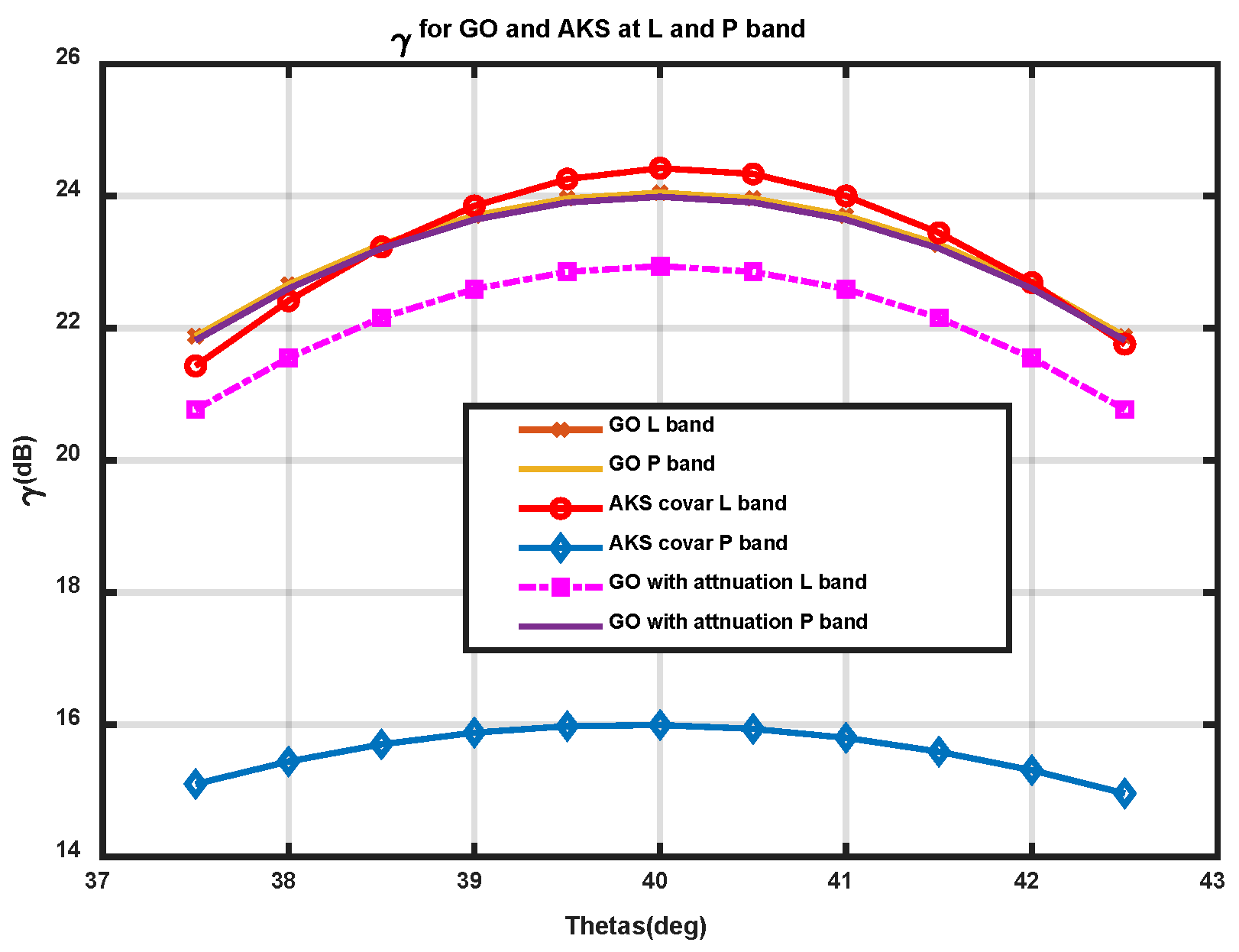
3.6. Two Geometric Optics Approaches
3.7. Numerical Results for L-Band and P-Band
3.8. L-Band: Track-Wise Comparison of DDM with CYGNSS Data
4. Rough Surface
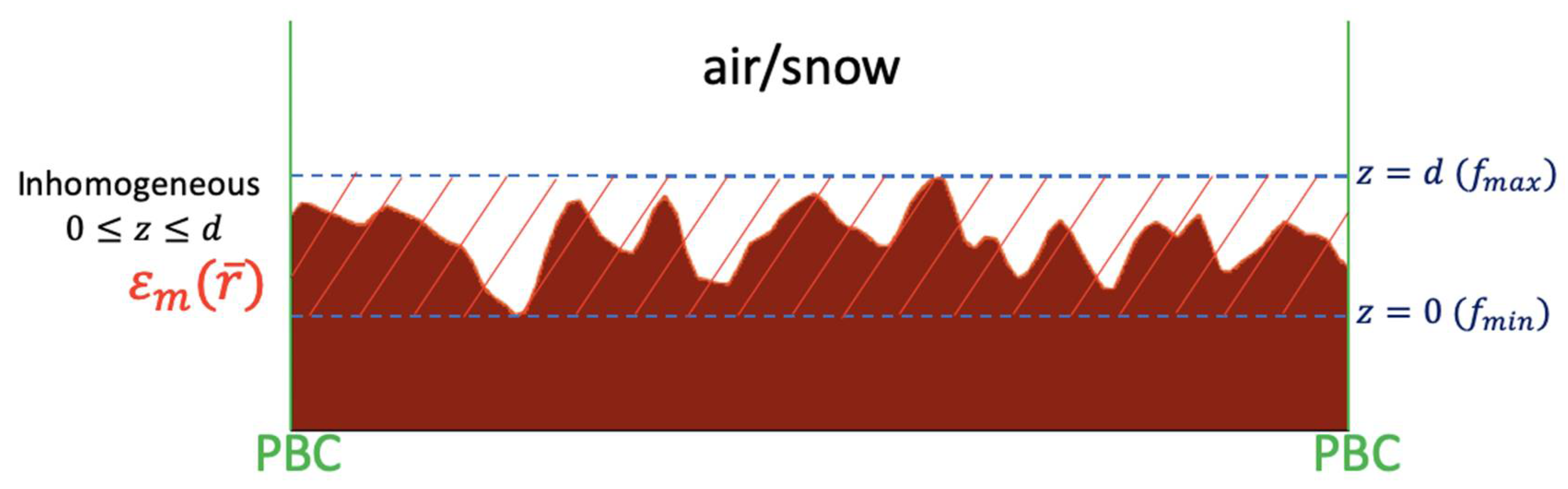
4.1. Formulation of VIE Using Periodic Boundary Conditions and Periodic Half Space Dyadic Green’s Function
4.2. Modeling and Estimation of the Roughness
4.3. The Frequency and Roughness Responses of the Backscattering from the Rough Surface
4.4. Using the Retrieved rms Height from UAVSAR L-Band Data to Simulate Backscattering at X- and Ku-Bands
Interaction of Radar Waves with the Ground Surface Beneath the Snowpack
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Huang, H.; Tsang, L.; Colliander, A.; Yueh, S.H. Propagation of Waves in Randomly Distributed Cylinders Using Three-Dimensional Vector Cylindrical Wave Expansions in Foldy–Lax Equations. IEEE J. Multiscale Multiphysics Comput. Tech. 2019, 4, 214–226. [Google Scholar] [CrossRef]
- Huang, H.; Tsang, L.; Colliander, A.; Shah, R.; Xu, X.; Yueh, S. Multiple scattering of waves by complex objects using hybrid method of t-matrix and foldy-lax equations using vector spherical waves and vector spheroidal waves. Prog. Electromagn. Res. 2020, 168, 87–111. [Google Scholar] [CrossRef]
- Gu, W.; Tsang, L.; Colliander, A.; Yueh, S.H. Wave Propagation in Vegetation Field Using a Hybrid Method. IEEE Trans. Antennas Propag. 2021, 69, 6752–6761. [Google Scholar] [CrossRef]
- Gu, W.; Tsang, L.; Colliander, A.; Yueh, S.H. Multifrequency Full-Wave Simulations of Vegetation Using a Hybrid Method. IEEE Trans. Microw. Theory Tech. 2021, 70, 275–285. [Google Scholar] [CrossRef]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Rosello, J. Spaceborne GNSS-Reflectometry on TechDemoSat-1: Early Mission Operations and Exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Ruf, C.; Unwin, M.; Dickinson, J.; Rose, R.; Rose, D.; Vincent, M.; Lyons, A. CYGNSS: Enabling the Future of Hurricane Prediction [Remote Sensing Satellites]. IEEE Geosci. Remote Sens. Mag. 2013, 1, 52–67. [Google Scholar] [CrossRef]
- Kim, H.; Lakshmi, V. Use of Cyclone Global Navigation Satellite System (CyGNSS) Observations for Estimation of Soil Moisture. Geophys. Res. Lett. 2018, 45, 8272–8282. [Google Scholar] [CrossRef] [Green Version]
- Chew, C.C.; Small, E.E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef] [Green Version]
- Clarizia, M.P.; Pierdicca, N.; Costantini, F.; Floury, N. Analysis of CYGNSS Data for Soil Moisture Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2227–2235. [Google Scholar] [CrossRef]
- Shah, R.; Xu, X.; Yueh, S.; Chae, C.S.; Elder, K.; Starr, B.; Kim, Y. Remote Sensing of Snow Water Equivalent Using P-Band Coherent Reflection. IEEE Geosci. Remote Sens. Lett. 2017, 14, 309–313. [Google Scholar] [CrossRef]
- Yueh, S.H.; Shah, R.; Xu, X.; Stiles, B.; Bosch-Lluis, X. A Satellite Synthetic Aperture Radar Concept Using P-Band Signals of Opportunity. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2796–2816. [Google Scholar] [CrossRef]
- Gu, W.; Xu, H.; Tsang, L. A numerical kirchhoff simulator for gnss-r land applications. Prog. Electromagn. Res. 2019, 164, 119–133. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Tsang, L.; Xu, H. A physical patch model for gnss-r land applications. Prog. Electromagn. Res. 2019, 165, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Zhu, J.; Tsang, L.; Kim, A.S.B. A fine scale partially coherent patch model including topographical effects for gnss-r ddm simulations. Prog. Electromagn. Res. 2021, 170, 97–128. [Google Scholar] [CrossRef]
- Ren, B.; Zhu, J.; Tsang, L.; Xu, A.H. Analytical Kirchhoff Solutions (Aks) and Numerical Kirchhoff Approach (Nka) for First-Principle Calculations of Coherent Waves and Incoherent Waves at P Band and L Band in Signals of Opportunity (Soop). Prog. Electromagn. Res. 2021, 171, 35–73. [Google Scholar] [CrossRef]
- Tsang, L.; Durand, M.; Derksen, C.; Barros, A.P.; Kang, D.H.; Lievens, H.; Marshall, H.P.; Zhu, J.; Johnson, J.; King, J.; et al. Review Article: Global Monitoring of Snow Water Equivalent Using High Frequency Radar Remote Sensing. The Cryosphere 2022. accepted. [Google Scholar] [CrossRef]
- Rott, H.; Yueh, S.H.; Cline, D.W.; Duguay, C.; Essery, R.; Haas, C.; Hélière, F.; Kern, M.; Macelloni, G.; Malnes, E.; et al. Cold Regions Hydrology High-Resolution Observatory for Snow and Cold Land Processes. Proc. IEEE 2010, 98, 752–765. [Google Scholar] [CrossRef] [Green Version]
- Lemmetyinen, J.; Derksen, C.; Rott, H.; Macelloni, G.; King, J.; Schneebeli, M.; Wiesmann, A.; Leppänen, L.; Kontu, A.; Pulliainen, J. Retrieval of Effective Correlation Length and Snow Water Equivalent from Radar and Passive Microwave Measurements. Remote Sens. 2018, 10, 170. [Google Scholar] [CrossRef] [Green Version]
- King, J.; Derksen, C.; Toose, P.; Langlois, A.; Larsen, C.; Lemmetyinen, J.; Marsh, P.; Montpetit, B.; Roy, A.; Rutter, N.; et al. The influence of snow microstructure on dual-frequency radar measurements in a tundra environment. Remote Sens. Environ. 2018, 215, 242–254. [Google Scholar] [CrossRef]
- Xiong, C.; Shi, J.; Pan, J.; Xu, H.; Che, T.; Zhao, T.; Ren, Y.; Geng, D.; Jiang, K.; Feng, P. Time Series X- and Ku-Band Ground-Based Synthetic Aperture Radar Observation of Snow-Covered Soil and Its Electromagnetic Modeling. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–13. [Google Scholar] [CrossRef]
- Tan, S.; Chang, W.; Tsang, L.; Lemmetyinen, J.; Proksch, M. Modeling Both Active and Passive Microwave Remote Sensing of Snow Using Dense Media Radiative Transfer (DMRT) Theory with Multiple Scattering and Backscattering Enhancement. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4418–4430. [Google Scholar] [CrossRef]
- Tsang, L.; Tan, S.; Xiong, C.; Shi, J. 4.05—Optical and Microwave Modeling of Snow. In Comprehensive Remote Sensing; Liang, S., Ed.; Elsevier: Oxford, UK, 2018; pp. 85–138. ISBN 978-0-12-803221-3. [Google Scholar]
- Zhu, J.; Tan, S.; King, J.; Derksen, C.; Lemmetyinen, J.; Tsang, L. Forward and Inverse Radar Modeling of Terrestrial Snow Using SnowSAR Data. IEEE Trans. Geosci. Remote Sens. 2018, 56, 7122–7132. [Google Scholar] [CrossRef]
- Huang, S.; Tsang, L.; Njoku, E.G.; Chan, K.S. Backscattering Coefficients, Coherent Reflectivities, and Emissivities of Randomly Rough Soil Surfaces at L-Band for SMAP Applications Based on Numerical Solutions of Maxwell Equations in Three-Dimensional Simulations. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2557–2568. [Google Scholar] [CrossRef]
- Huang, S.; Tsang, L. Electromagnetic Scattering of Randomly Rough Soil Surfaces Based on Numerical Solutions of Maxwell Equations in Three-Dimensional Simulations Using a Hybrid UV/PBTG/SMCG Method. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4025–4035. [Google Scholar] [CrossRef]
- Liao, T.-H.; Tsang, L.; Huang, S.; Niamsuwan, N.; Jaruwatanadilok, S.; Kim, S.-B.; Ren, H.; Chen, K.-L. Copolarized and Cross-Polarized Backscattering from Random Rough Soil Surfaces from L-Band to Ku-Band Using Numerical Solutions of Maxwell’s Equations with Near-Field Precondition. IEEE Trans. Geosci. Remote Sens. 2015, 54, 651–662. [Google Scholar] [CrossRef]
- Tsang, L.; Kong, J.A.; Ding, K.-H. Scattering of Electromagnetic Waves: Theories and Applications; John Wiley & Sons, Inc.: New York, NY, USA, 2000; Volume 1, ISBN 978-0-471-22428-0. [Google Scholar]
- Kim, S.-B.; Moghaddam, M.; Tsang, L.; Burgin, M.; Xu, X.; Njoku, E.G. Models of L-Band Radar Backscattering Coefficients Over Global Terrain for Soil Moisture Retrieval. IEEE Trans. Geosci. Remote Sens. 2013, 52, 1381–1396. [Google Scholar] [CrossRef]
- Huang, H.; Liao, T.-H.; Kim, S.B.; Xu, X.; Tsang, L.; Jackson, T.J.; Yueh, A.S. L-Band radar scattering and soil moisture retrieval of wheat, canola and pasture fields for smap active algorithms. Prog. Electromagn. Res. 2021, 170, 129–152. [Google Scholar] [CrossRef]
- Tsang, L.; Ishimaru, A. Backscattering enhancement of random discrete scatterers. J. Opt. Soc. Am. A 1984, 1, 836–839. [Google Scholar] [CrossRef]
- Lang, R.H.; Khadr, N. Effects of Backscattering Enhancement on Soil Moisture Sensitivity. In Proceedings of the IGARSS ’92 International Geoscience and Remote Sensing Symposium, Houston, TX, USA, 26–29 May 1992; Volume 2, pp. 916–919. [Google Scholar]
- Liao, T.-H.; Kim, S.-B.; Tan, S.; Tsang, L.; Su, C.; Jackson, T.J. Multiple Scattering Effects with Cyclical Correction in Active Remote Sensing of Vegetated Surface Using Vector Radiative Transfer Theory. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1414–1429. [Google Scholar] [CrossRef]
- Huang, H.; Tsang, L.; Njoku, E.G.; Colliander, A.; Liao, T.-H.; Ding, K.-H. Propagation and Scattering by a Layer of Randomly Distributed Dielectric Cylinders Using Monte Carlo Simulations of 3D Maxwell Equations with Applications in Microwave Interactions with Vegetation. IEEE Access 2017, 5, 11985–12003. [Google Scholar] [CrossRef]
- Jing, C.; Niu, X.; Duan, C.; Lu, F.; Di, G.; Yang, X. Sea Surface Wind Speed Retrieval from the First Chinese GNSS-R Mission: Technique and Preliminary Results. Remote Sens. 2019, 11, 3013. [Google Scholar] [CrossRef] [Green Version]
- Clarizia, M.P.; Ruf, C.S. Wind Speed Retrieval Algorithm for the Cyclone Global Navigation Satellite System (CYGNSS) Mission. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4419–4432. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martín-Neira, M. First spaceborne phase altimetry over sea ice using TechDemoSat-1 GNSS-R signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Nghiem, S.V.; Zuffada, C.; Shah, R.; Chew, C.; Lowe, S.T.; Mannucci, A.J.; Cardellach, E.; Brakenridge, G.; Geller, G.; Rosenqvist, A. Wetland monitoring with Global Navigation Satellite System reflectometry. Earth Space Sci. 2016, 4, 16–39. [Google Scholar] [CrossRef]
- Tsang, L.; Kong, J.A. Scattering of Electromagnetic Waves: Advanced Topics; John Wiley & Sons, Inc.: New York, NY, USA, 2001; Volume 3, ISBN 978-0-471-22427-3. [Google Scholar]
- Zavorotny, V.; Voronovich, A. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef] [Green Version]
- Campbell, J.D.; Melebari, A.; Moghaddam, M. Modeling the Effects of Topography on Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1740–1751. [Google Scholar] [CrossRef]
- Campbell, J.D.; Akbar, R.; Azemati, A.; Bringer, A.; Comite, D.; Dente, L.; Gleason, S.T.; Guerriero, L.; Hodges, E.; Johnson, J.T.; et al. Intercomparison of Models for CYGNSS Delay-Doppler Maps at a Validation Site in the San Luis Valley of Colorado. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 2001–2004. [Google Scholar]
- Thompson, D.; Elfouhaily, T.; Garrison, J. An improved geometrical optics model for bistatic GPS scattering from the ocean surface. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2810–2821. [Google Scholar] [CrossRef]
- Bringer, A.; Johnson, J.T.; Toth, C.; Ruf, C.; Moghaddam, M. Studies of Terrain Surface Roughness and Its Effect on GNSS-R Systems Using Airborne Lidar Measurements. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 2016–2019. [Google Scholar]
- Rodriguez, E.; Morris, C.S.; Belz, J.E.; Chapin, E.; Martin, J.; Daffer, W.; Hensley, S. An Assessment of the SRTM Topographic Products; Technical Report JPL D-31639; JPL: Pasadena, CA, USA, 2005. [Google Scholar]
- Zhu, J.; Tsang, L.; Liao, T.-H. Scattering from Random Rough Surfaces at X and Ku Band for Global Remote Sensing of Ter-restrial Snow. In Proceedings of the 2021 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (APS/URSI), Singapore, 10–16 July 2021; pp. 1115–1116. [Google Scholar]
- Zhu, J. Surface and Volume Scattering Model in Microwave Remote Sensing of Snow and Soil Moisture. Ph.D. Thesis, Department of EECS, University of Michigan, Ann Arbor, MI, USA, December 2021. [Google Scholar]
- Ishimaru, A. Wave Propagation and Scattering in Random Media; Multiple Scattering, Turbulence, Rough Surfaces, and Remote Sensing; Academic Press: Cambridge, MA, USA, 1978; ISBN 978-0-12-374702-0. [Google Scholar]
- Chen, K.S.; Wu, T.D.; Tsang, L.; Li, Q.; Shi, J.C.; Fung, A.K. Emission of rough surfaces calculated by the integral equation method with comparison to three-dimensional moment method simulations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 90–101. [Google Scholar] [CrossRef]
- Voronovich, A. Small-slope approximation for electromagnetic wave scattering at a rough interface of two dielectric half-spaces. Waves Random Media 1994, 4, 337–367. [Google Scholar] [CrossRef]
- Elfouhaily, T.M.; Johnson, J.T. The Reduced Local Curvature Approximation for Rough Surface Scattering. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 1354–1357. [Google Scholar]
- Kim, S.-B.; Van Zyl, J.J.; Johnson, J.T.; Moghaddam, M.; Tsang, L.; Colliander, A.; Dunbar, R.S.; Jackson, T.J.; Jaruwatanadilok, S.; West, R.; et al. Surface Soil Moisture Retrieval Using the L-Band Synthetic Aperture Radar Onboard the Soil Moisture Active–Passive Satellite and Evaluation at Core Validation Sites. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1897–1914. [Google Scholar] [CrossRef] [PubMed]
- Ulaby, F.T.; Batlivala, P.P.; Dobson, M.C. Microwave Backscatter Dependence on Surface Roughness, Soil Moisture, and Soil Texture: Part I-Bare Soil. IEEE Trans. Geosci. Electron. 1978, 16, 286–295. [Google Scholar] [CrossRef]
- Kay, B.D. Soil Structure and Organic Carbon: A Review. In Soil Processes and the Carbon Cycle; CRC Press: Boca Raton, FL, USA, 1997; ISBN 978-0-203-73927-3. [Google Scholar]
- Ulaby, F.T.; Long, D.G. Microwave Radar and Radiometric Remote Sensing; The University of Michigan Press: Ann Arbor, MI, USA, 2014; ISBN 978-0-472-11935-6. [Google Scholar]
- Kim, S.-B.; Tsang, L.; Johnson, J.T.; Huang, S.; van Zyl, J.J.; Njoku, E.G. Soil Moisture Retrieval Using Time-Series Radar Observations Over Bare Surfaces. IEEE Trans. Geosci. Remote Sens. 2011, 50, 1853–1863. [Google Scholar] [CrossRef]
- Mironov, V.; Dobson, M.; Kaupp, V.; Komarov, S.; Kleshchenko, V. Generalized refractive mixing dielectric model for moist soils. IEEE Trans. Geosci. Remote Sens. 2004, 42, 773–785. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Dielectric properties of soils in the 0.3–1.3-GHz range. IEEE Trans. Geosci. Remote Sens. 1995, 33, 803–807. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. An empirical model and an inversion technique for radar scattering from bare soil surfaces. IEEE Trans. Geosci. Remote Sens. 1992, 30, 370–381. [Google Scholar] [CrossRef]
- Lawrence, H.; Demontoux, F.; Wigneron, J.-P.; Paillou, P.; Wu, T.-D.; Kerr, Y.H. Evaluation of a Numerical Modeling Approach Based on the Finite-Element Method for Calculating the Rough Surface Scattering and Emission of a Soil Layer. IEEE Geosci. Remote Sens. Lett. 2011, 8, 953–957. [Google Scholar] [CrossRef]
- Mrnka, M. Random Gaussian Rough Surfaces for Full-Wave Electromagnetic Simulations. In Proceedings of the 2017 Conference on Microwave Techniques (COMITE), Brno, Czech Republic, 20–21 April 2017; pp. 1–4. [Google Scholar]
- Wei, Y.-W.; Wang, C.-F.; Kee, C.Y.; Chia, T.-T. An Accurate Model for the Efficient Simulation of Electromagnetic Scattering from an Object Above a Rough Surface with Infinite Extent. IEEE Trans. Antennas Propag. 2020, 69, 1040–1051. [Google Scholar] [CrossRef]
- Duan, X.; Moghaddam, M. Bistatic Vector 3-D Scattering from Layered Rough Surfaces Using Stabilized Extended Boundary Condition Method. IEEE Trans. Geosci. Remote Sens. 2012, 51, 2722–2733. [Google Scholar] [CrossRef]
- Chen, K.-S.; Tsang, L.; Chen, K.-L.; Liao, T.H.; Lee, J.-S. Polarimetric Simulations of SAR at L-Band Over Bare Soil Using Scattering Matrices of Random Rough Surfaces from Numerical Three-Dimensional Solutions of Maxwell Equations. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7048–7058. [Google Scholar] [CrossRef]
- Tan, S.; Xiong, C.; Xu, X.; Tsang, L. Uniaxial Effective Permittivity of Anisotropic Bicontinuous Random Media Using NMM3D. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1168–1172. [Google Scholar] [CrossRef]
- Kim, S.; Van Zyl, J.; Dunbar, R.S.; Njoku, E.G.; Johnson, J.T.; Moghaddam, M.; Tsang, L. SMAP L3 Radar Global Daily 3 km EASE-Grid Soil Moisture, Version 3; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2016. [Google Scholar] [CrossRef]
- Tan, S.; Zhu, J.; Tsang, L.; Nghiem, S.V. Microwave Signatures of Snow Cover Using Numerical Maxwell Equations Based on Discrete Dipole Approximation in Bicontinuous Media and Half-Space Dyadic Green’s Function. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4686–4702. [Google Scholar] [CrossRef]
- Tan, S. Multiple Volume Scattering in Random Media and Periodic Structures with Applications in Microwave Remote Sensing and Wave Functional Materials. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2016. [Google Scholar]
- Tsang, L.; Kong, J.A.; Ding, K.-H.; Ao, C.O. Scattering of Electromagnetic Waves: Numerical Simulations; John Wiley & Sons, Inc.: New York, NY, USA, 2001; Volume 2, ISBN 978-0-471-22430-3. [Google Scholar]
- Wu, T.-D.; Chen, K.-S.; Shi, J.C.; Lee, H.-W.; Fung, A.K. A Study of an AIEM Model for Bistatic Scattering from Randomly Rough Surfaces. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2584–2598. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CEM Method | Hybrid Method | Comments | |
|---|---|---|---|
| Full Wave | Entire problem of Np number of plants | Single plant is an object. T matrix is obtained for the plant | Each plant is an object In RT: each leaf is an object. Each branch is an object |
| Field Solutions | N = number of unknowns in field solutions, in millions | Multiple scattering of Np plants Np moderate number, e.g., 100 | NA |
| Reusable | Not reusable, solve N field unknowns for each realization | T matrices of a few plants plus azimuthal α rotations, reused for (i) configurations, random, quasi-periodic (ii) realizations (iii) future use | T matrices put on shelves for future use T matrices Portable |
| Iteration Solution of Each Realization | large number of iterations (e.g., conjugate gradient) for large number of N field unknowns to reach convergence of “exact” field solution | Iterate Foldy–Lax to obtain multiple scattering order solutions, second order, fourth order, tenth order, even orders of solutions | Significant wave iterations within a plant which are included in T matrix of a plant, less wave interactions between plants For vegetation fields and forests, no more than 10 multiple orders of solutions |
| Averaging over Realizations to Calculate Statistical Moments | Averaging “exact” solutions over Nr realizations | Averaging Nr realizations after second order, fourth order, sixth order, until statistical moments converge | Averaged second order solutions, fourth-order solutions, are analogous to analytical random media theory SPM in rough surfaces and iterative solutions of radiative transfer equation |
| 2° | 2 | 5 | 95.18° | 6 | 13 |
| 7.18° | 2 | 5 | 100.35° | 5 | 11 |
| 12.35° | 2 | 5 | 105.53° | 5 | 11 |
| 17.53° | 2 | 5 | 110.71° | 5 | 11 |
| 22.71° | 3 | 7 | 115.88° | 5 | 11 |
| 27.88° | 4 | 9 | 121.06° | 4 | 9 |
| 33.06° | 4 | 9 | 126.24° | 4 | 9 |
| 38.24° | 4 | 9 | 131.41° | 4 | 9 |
| 43.41° | 4 | 9 | 136.59° | 4 | 9 |
| 48.59° | 4 | 9 | 141.76° | 4 | 9 |
| 53.76° | 4 | 9 | 146.94° | 4 | 9 |
| 58.94° | 4 | 9 | 152.12° | 4 | 9 |
| 64.12° | 5 | 11 | 157.29° | 3 | 7 |
| 69.29° | 5 | 11 | 162.47° | 2 | 5 |
| 74.47° | 5 | 11 | 167.65° | 2 | 5 |
| 79.65° | 5 | 11 | 172.82° | 2 | 5 |
| 84.82° | 6 | 13 | 178° | 2 | 5 |
| 90° | 6 | 13 |
| RTE/DBA | Hybrid Method | |
|---|---|---|
| Transmission | 0.35 | 0.66 |
| Radar Backscattering with 40 Degrees Incident Angle | GNSS-R Observation Close to Specular Direction | |
|---|---|---|
| Scattering | Large angle from specular | Small angle from specular |
| Kirchhoff integral | Not Valid as Kirchhoff predicts VV is comparable to HH | Accurate near specular direction |
| Roughness | Microwave roughness Topography have small effects | Topography strong influence +microwave roughness |
| Mean field intensity/Covariance of field | Covariance of fields only | Mean field intensity and Covariance of fields |
| Gamma/sigma0 | −25 dB to 0 dB | Much Larger values 10 dB to 30 dB |
| Models | Numerical Kirchhoff Approach (NKA) [13] | Analytical Kirchhoff Solution (AKS) [16] |
|---|---|---|
| Discretization | 2 cm | 30-m DEM patch |
| Monte Carlo simulations | Monte Carlo Speckle fluctuations | Analytical No Monte Carlo No fluctuations |
| CPU time for one DDM pixel of 15 km | Intensive 1 week for one DMM | Fast 1 h for one DDM f1 and f2 constant |
| Validation | Accurate benchmark based on brute force calculations | Validated by NKA |
| DEM Coarse f3 | Planar with slope, deterministic | Planar with slope, deterministic |
| Fine scale f2: random | Monte Carlo average | Analytical average |
| Microwave f1: random | Monte Carlo average | Analytical average |
| Combining roughness | combined dividing line not needed | |
| Spectrum W(k) | Can directly use W(k) | Can directly use W(k) |
| Histogram statistics of amplitude and phase | Yes | No |
| Scales | |||
|---|---|---|---|
| Correlation Function | |||
| Spectrum |
| Longitude | ||
|---|---|---|
| <−105.90 | 125 | / |
| −105.86 | 69 | 0.0599 |
| −105.83 | 53 | 0.0785 |
| −105.79 | 52 | 0.0797 |
| −105.76 | 50 | 0.0837 |
| −105.73 | 61 | 0.0679 |
| −105.69 | 83 | 0.0503 |
| −105.66 | 74 | 0.0569 |
| −105.62 | 93 | 0.0448 |
| −105.59 | 126 | 0.0331 |
| >−105.56 | 125 | / |
| L Band (1.26 GHz) | S Band (2.5 GHz) | C Band (5.4 GHz) | X Band (9.6 GHz) | Low Ku Band (13.6 GHz) | High Ku Band (17.2 GHz) | |
|---|---|---|---|---|---|---|
| kh, air/soil interface | 1.32 | 2.62 | 5.66 | 10.06 | 14.25 | 18.02 |
| kh, snow/soil interface | 1.58 | 3.14 | 6.79 | 12.07 | 17.10 | 21.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsang, L.; Liao, T.-H.; Gao, R.; Xu, H.; Gu, W.; Zhu, J. Theory of Microwave Remote Sensing of Vegetation Effects, SoOp and Rough Soil Surface Backscattering. Remote Sens. 2022, 14, 3640. https://doi.org/10.3390/rs14153640
Tsang L, Liao T-H, Gao R, Xu H, Gu W, Zhu J. Theory of Microwave Remote Sensing of Vegetation Effects, SoOp and Rough Soil Surface Backscattering. Remote Sensing. 2022; 14(15):3640. https://doi.org/10.3390/rs14153640
Chicago/Turabian StyleTsang, Leung, Tien-Hao Liao, Ruoxing Gao, Haokui Xu, Weihui Gu, and Jiyue Zhu. 2022. "Theory of Microwave Remote Sensing of Vegetation Effects, SoOp and Rough Soil Surface Backscattering" Remote Sensing 14, no. 15: 3640. https://doi.org/10.3390/rs14153640
APA StyleTsang, L., Liao, T.-H., Gao, R., Xu, H., Gu, W., & Zhu, J. (2022). Theory of Microwave Remote Sensing of Vegetation Effects, SoOp and Rough Soil Surface Backscattering. Remote Sensing, 14(15), 3640. https://doi.org/10.3390/rs14153640