
A Newly Developed Tool for the Post-Processing of GPR Time-Slices in A GIS Environment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Developing a Plug-In to Automate GPR Time-Slices Postprocessing in QGIS
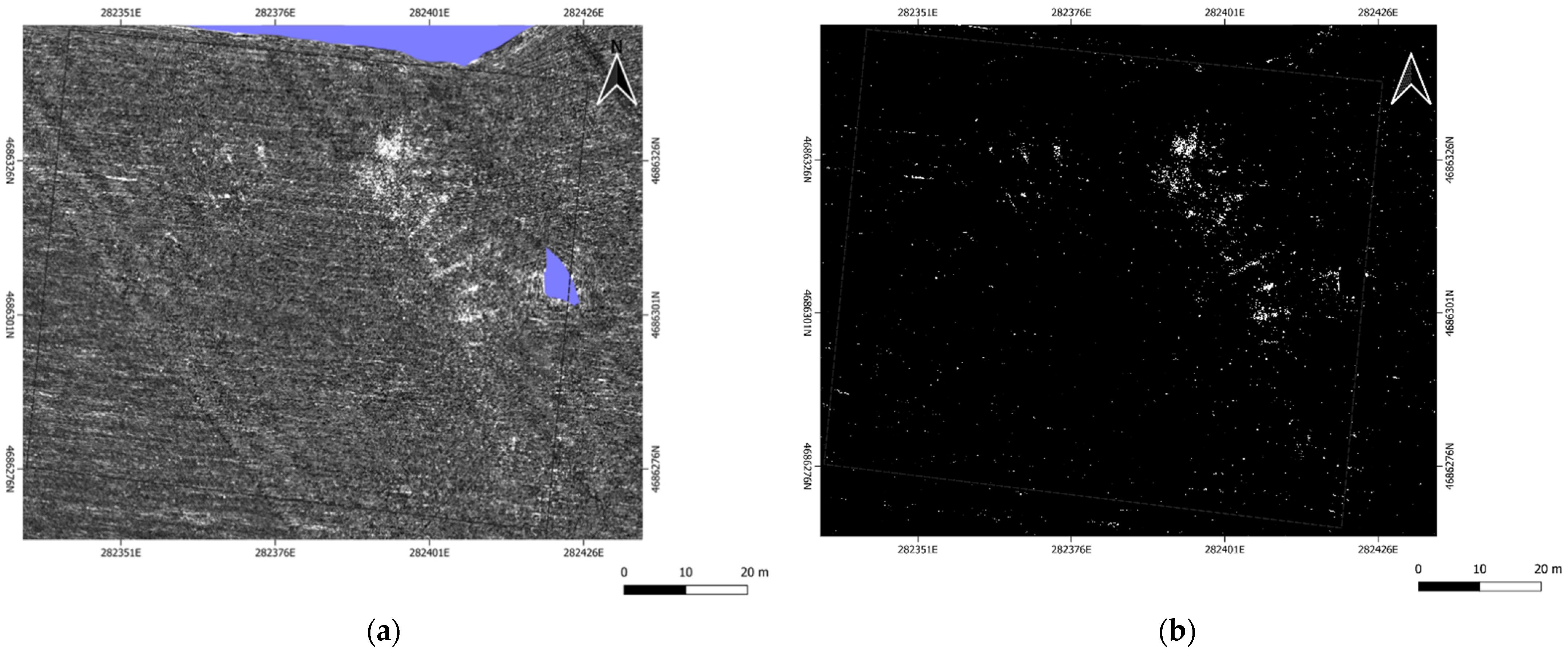
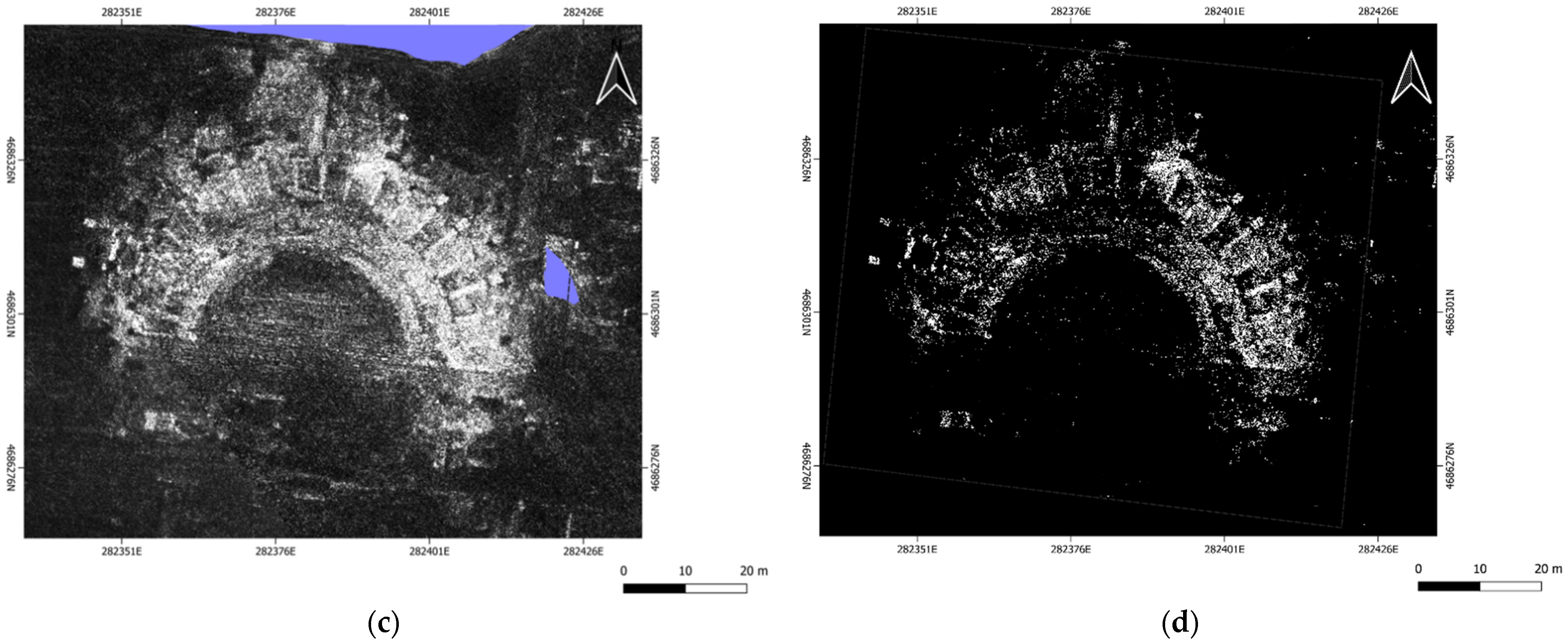
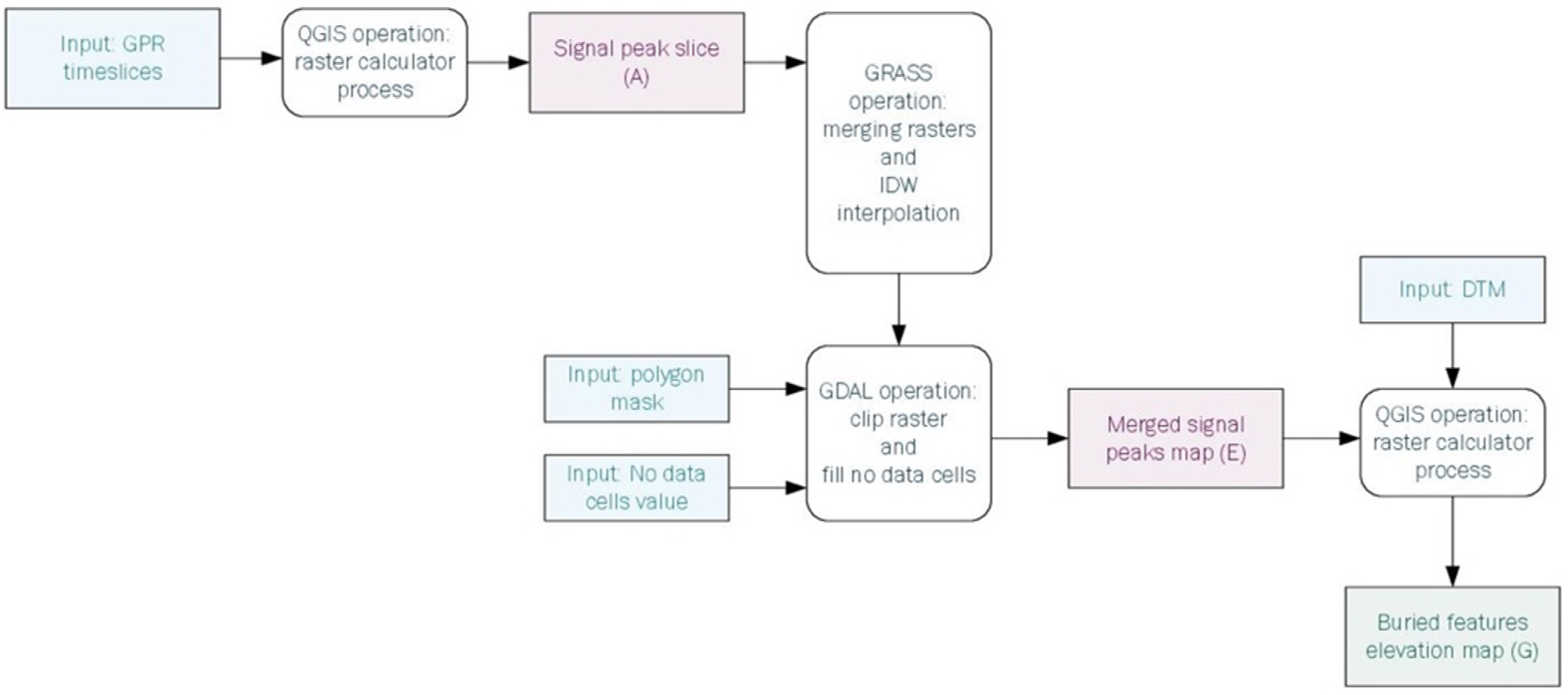
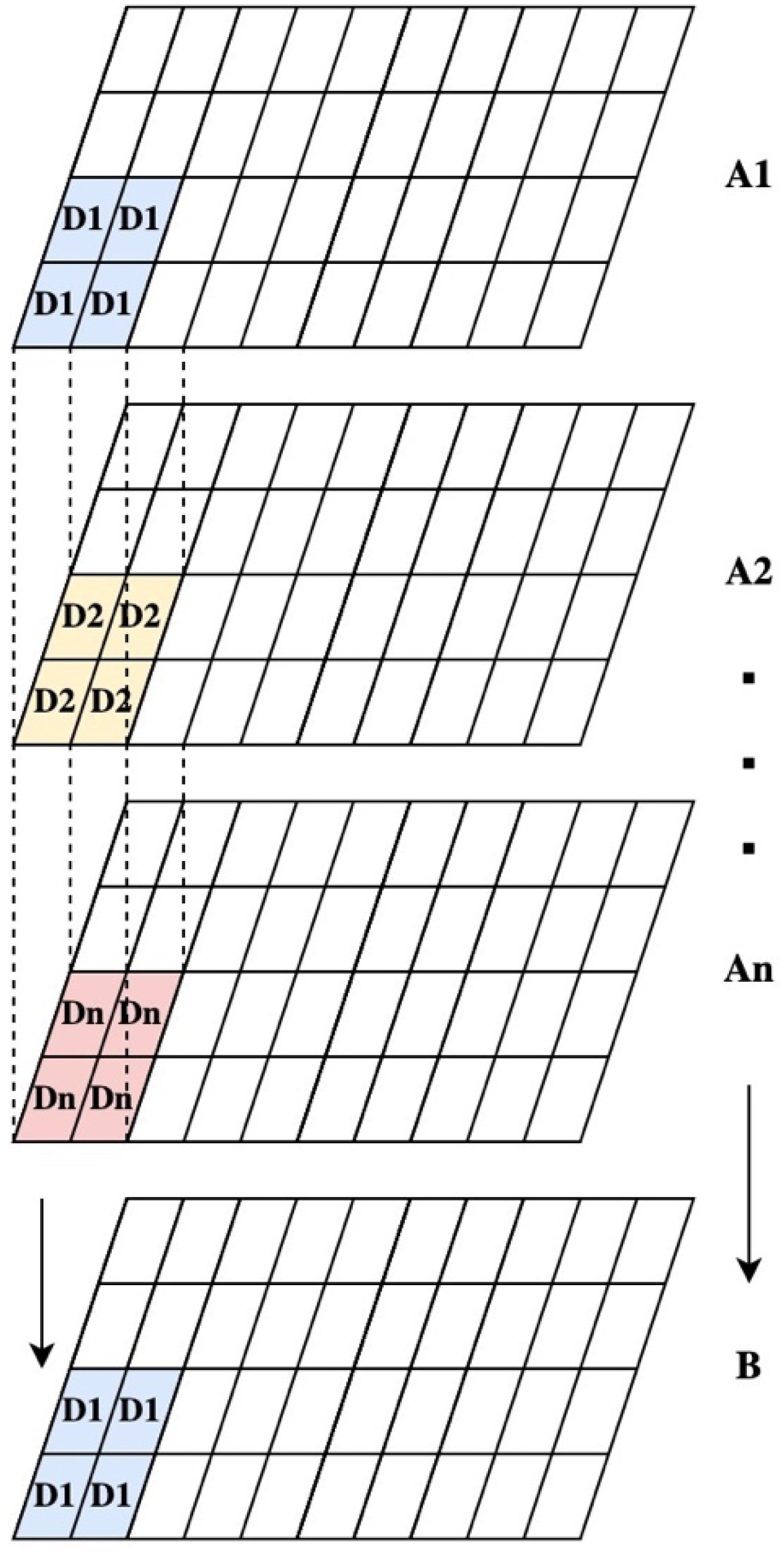
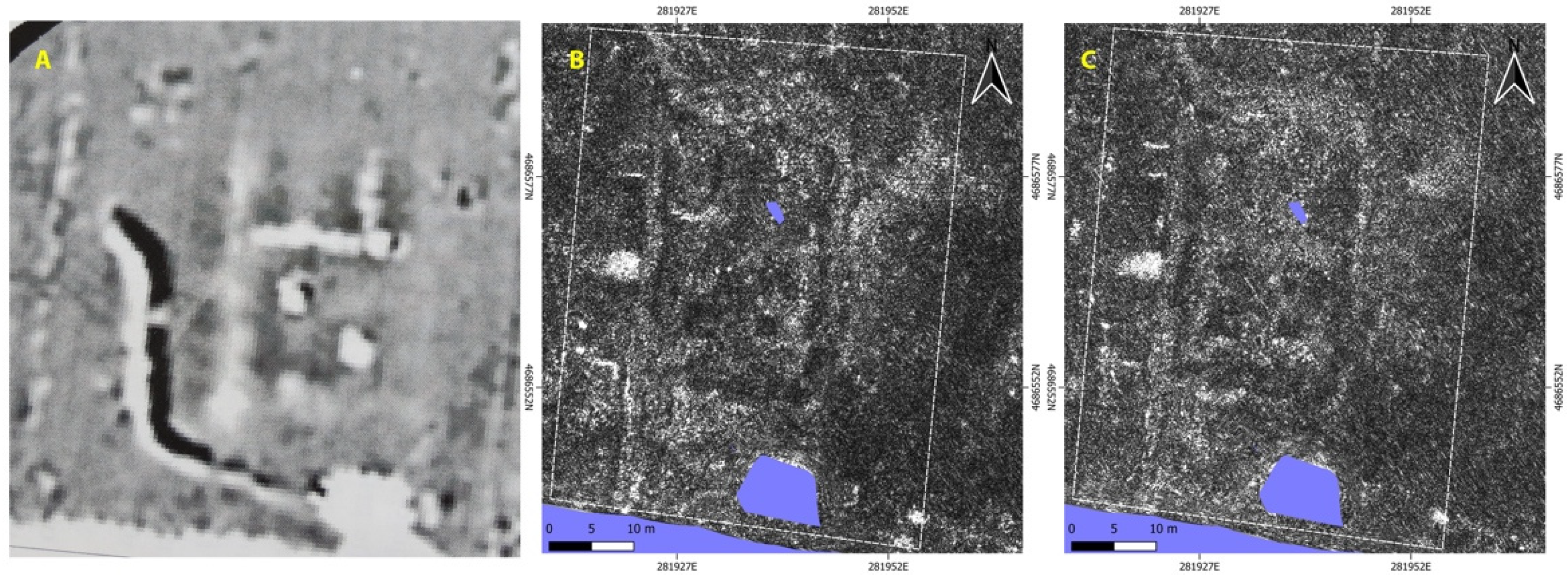
- Select in each raster (GeoTIFF) image of the time-slice the pixel value, or a group of values, in a raster band, corresponding to the signal intensity peak as expressed in the raster image resulting from the processing of GPR raw data after values have been clipped [29]. This operation creates a new raster image, containing only the pixels selected in the original time-slice, while eliminating all the remaining pixels, considered irrelevant.
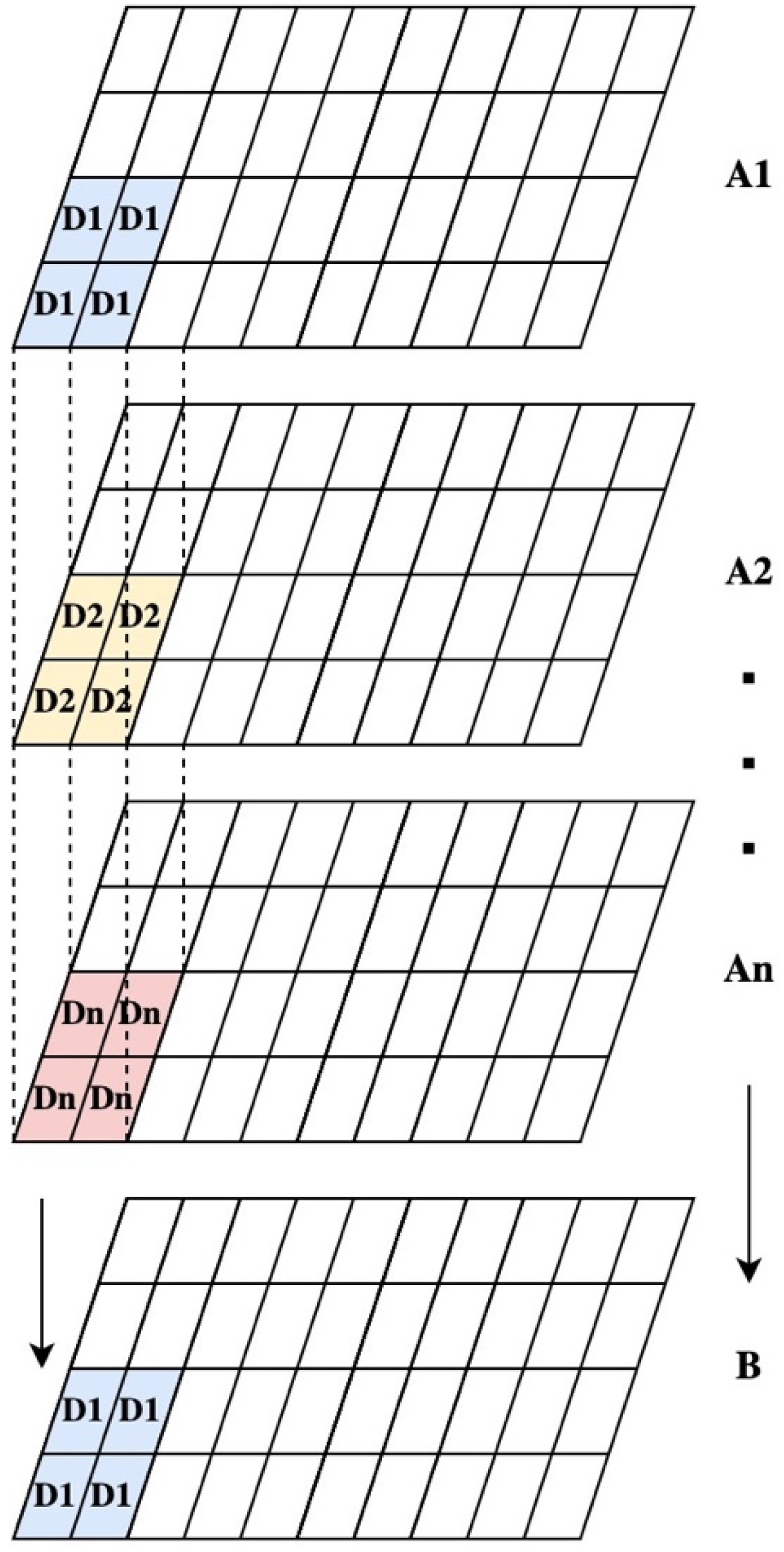
- In each new raster image produced in step 1, assign to the pixels the value of the estimated depth of the original time-slice. The result of this second step is a new raster image (that will be referred to as ‘signal peak slice’) where all pixels own the same depth value (Figure 1).
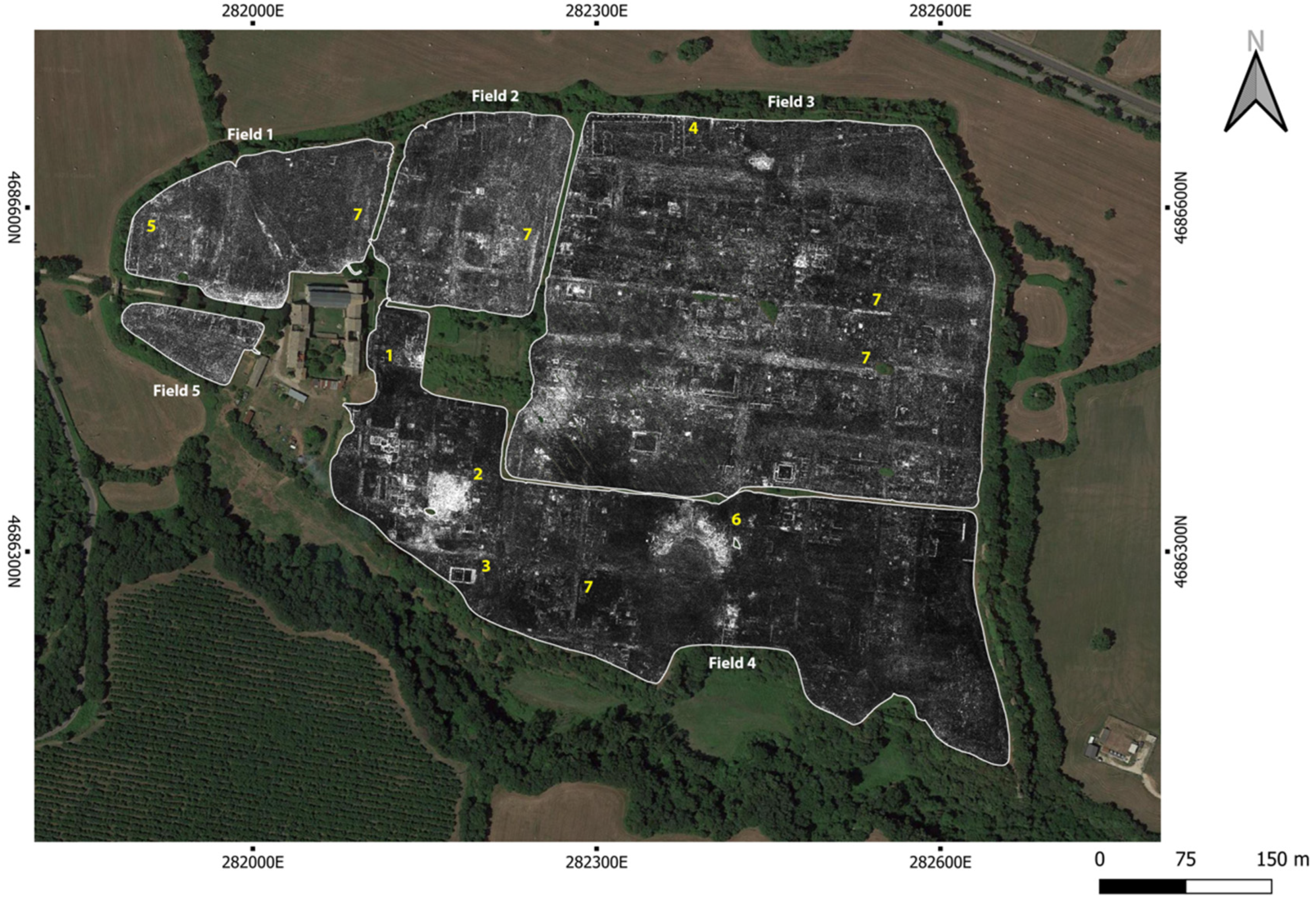
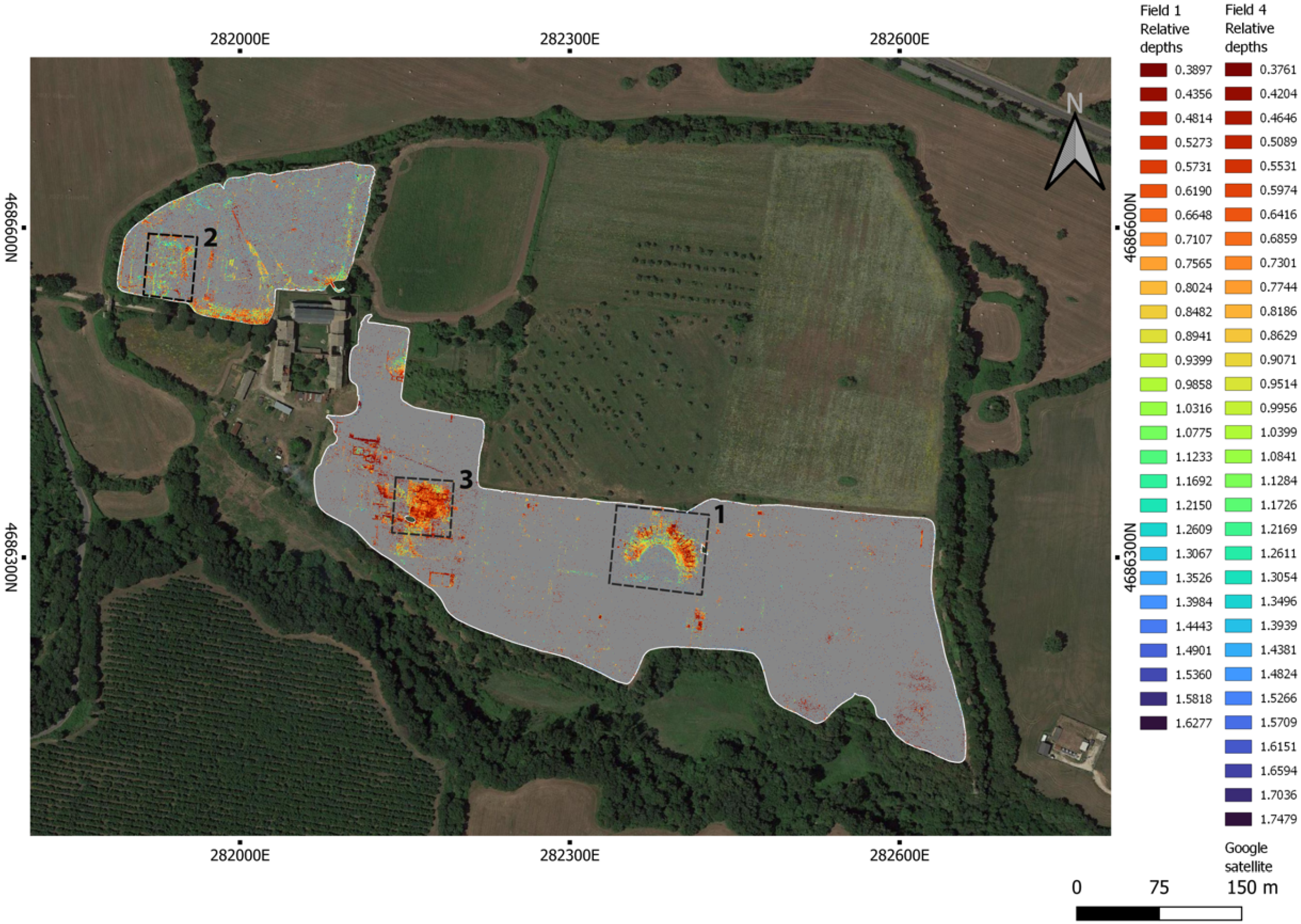
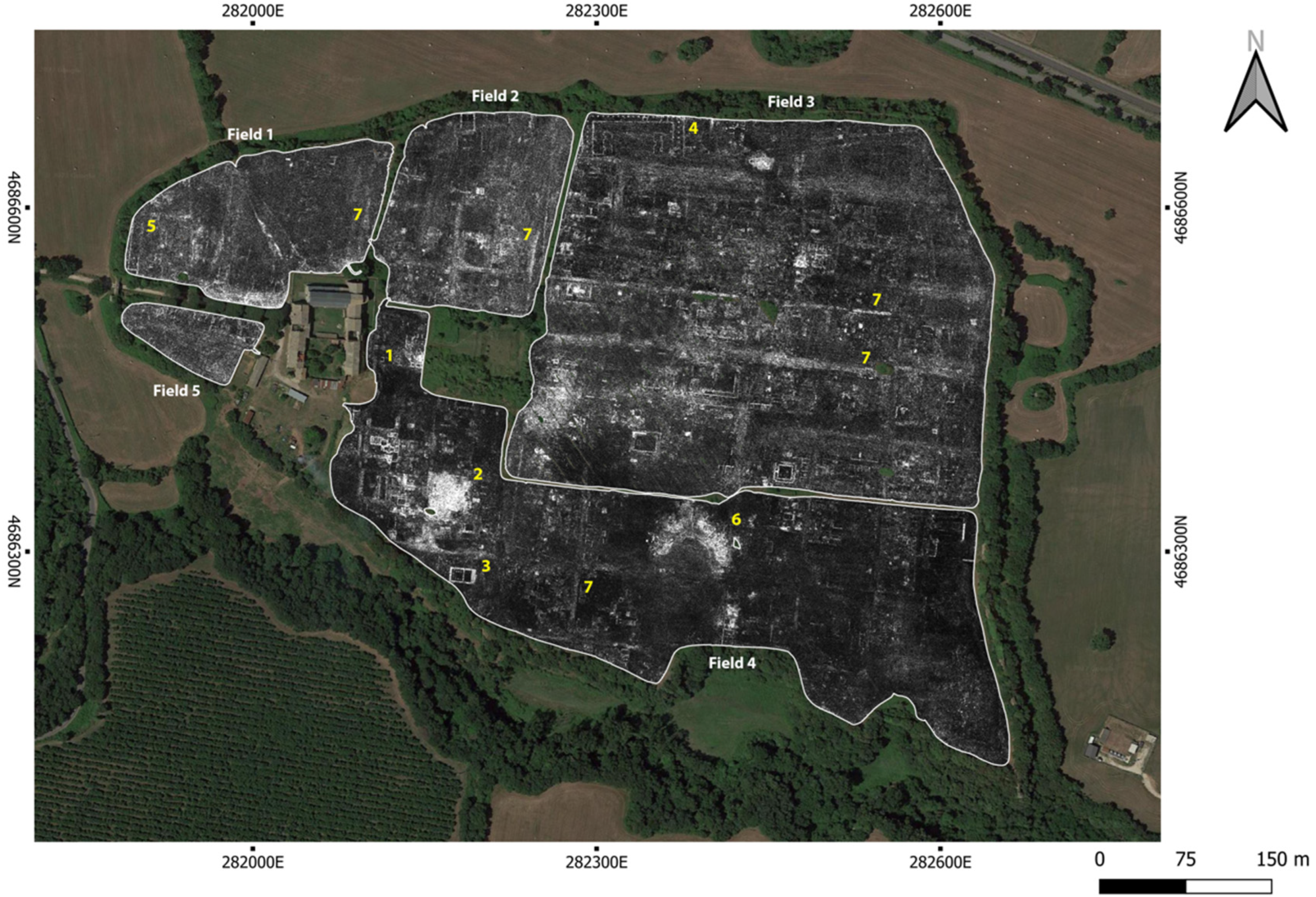
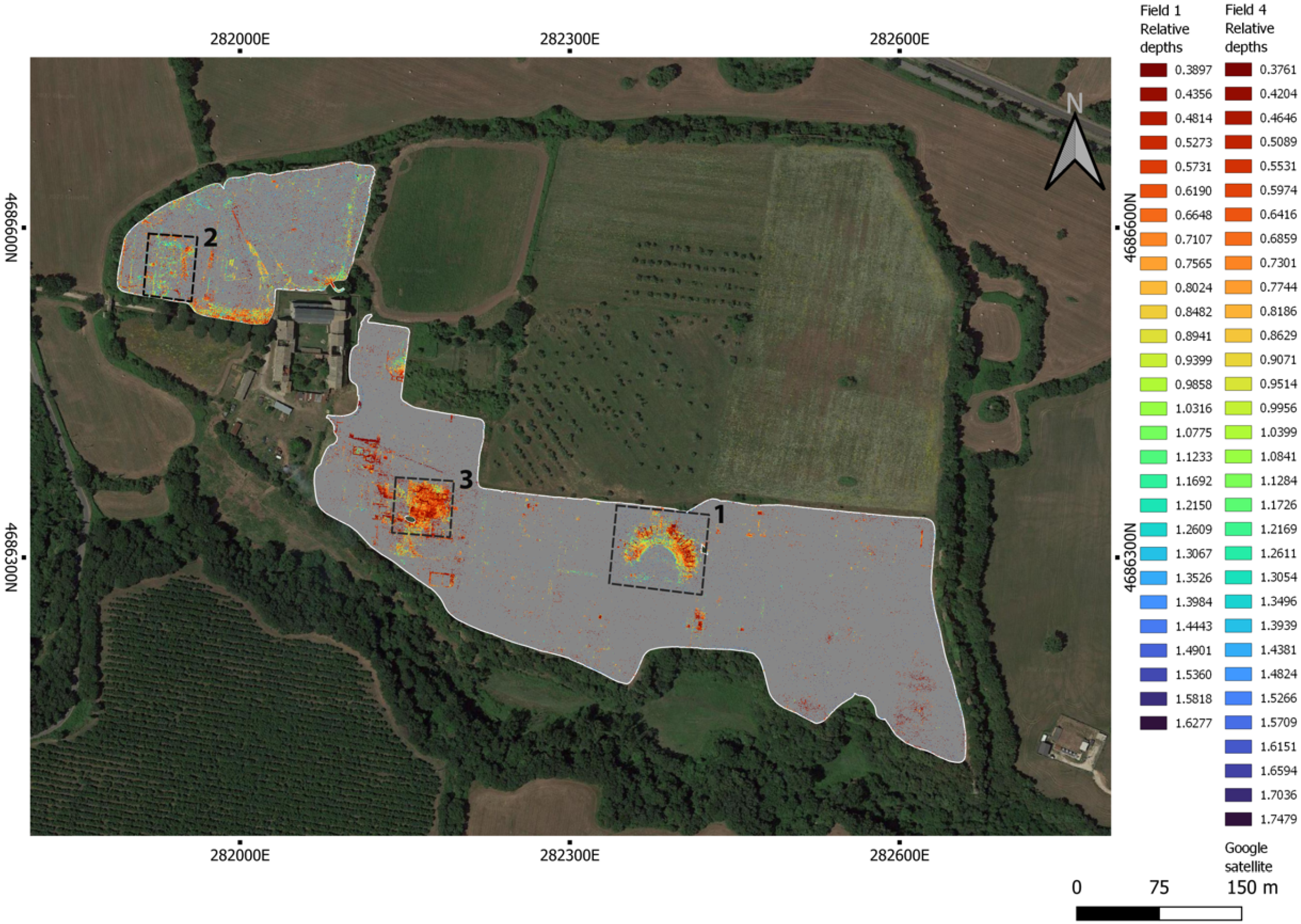
2.2. Case Study and Dataset
3. Results
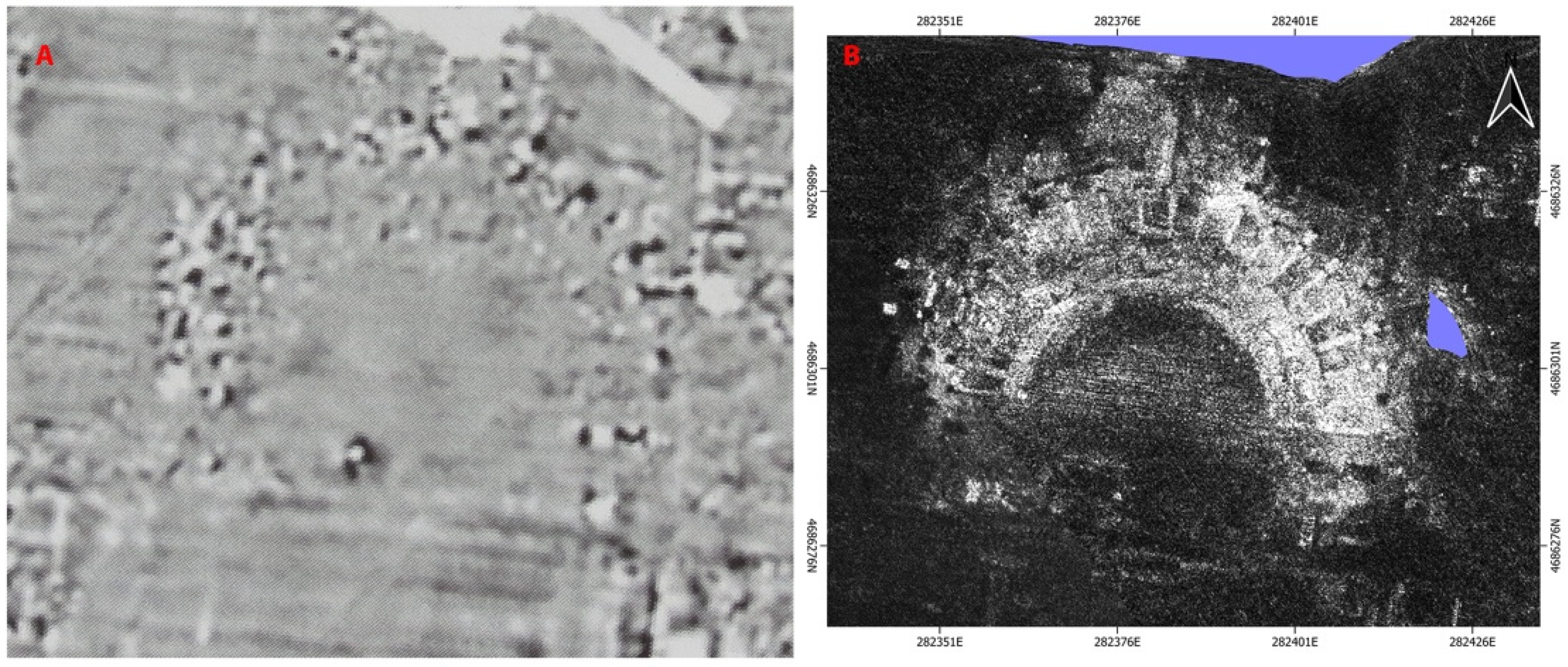
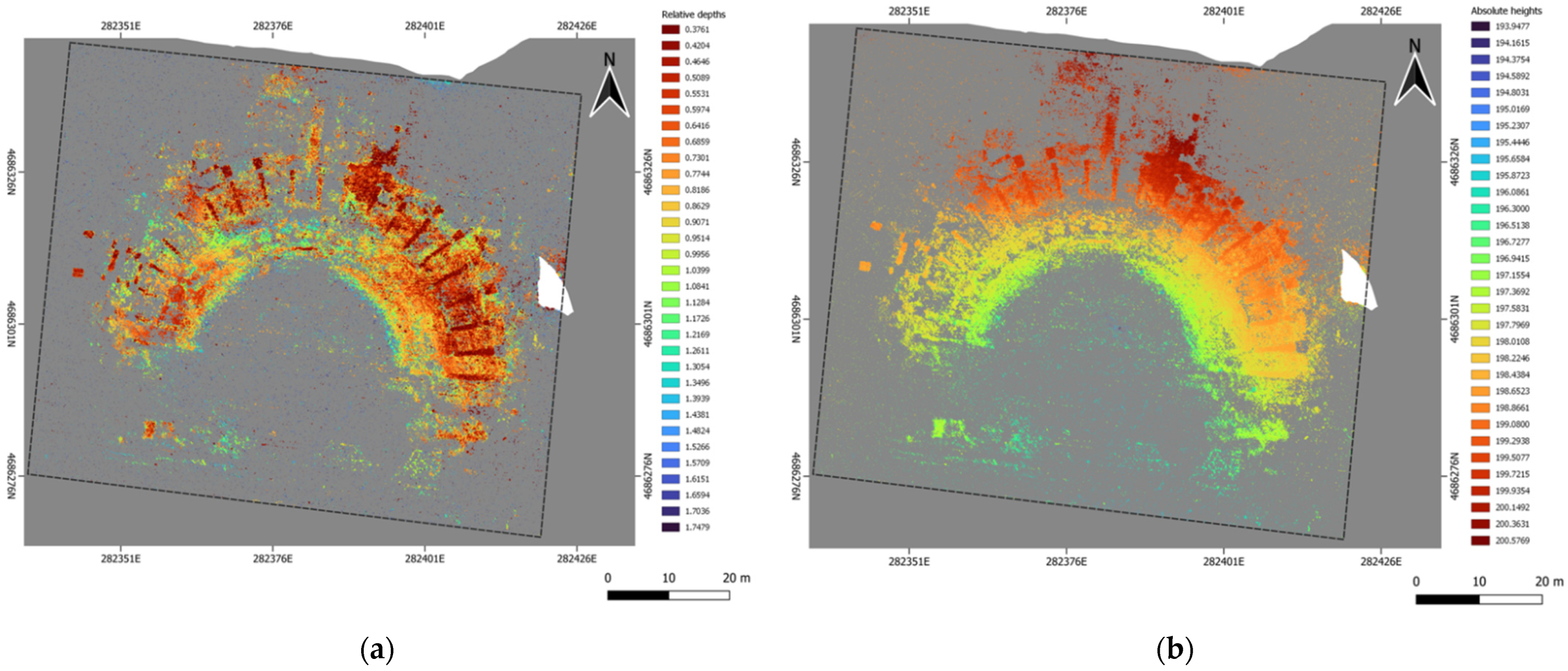
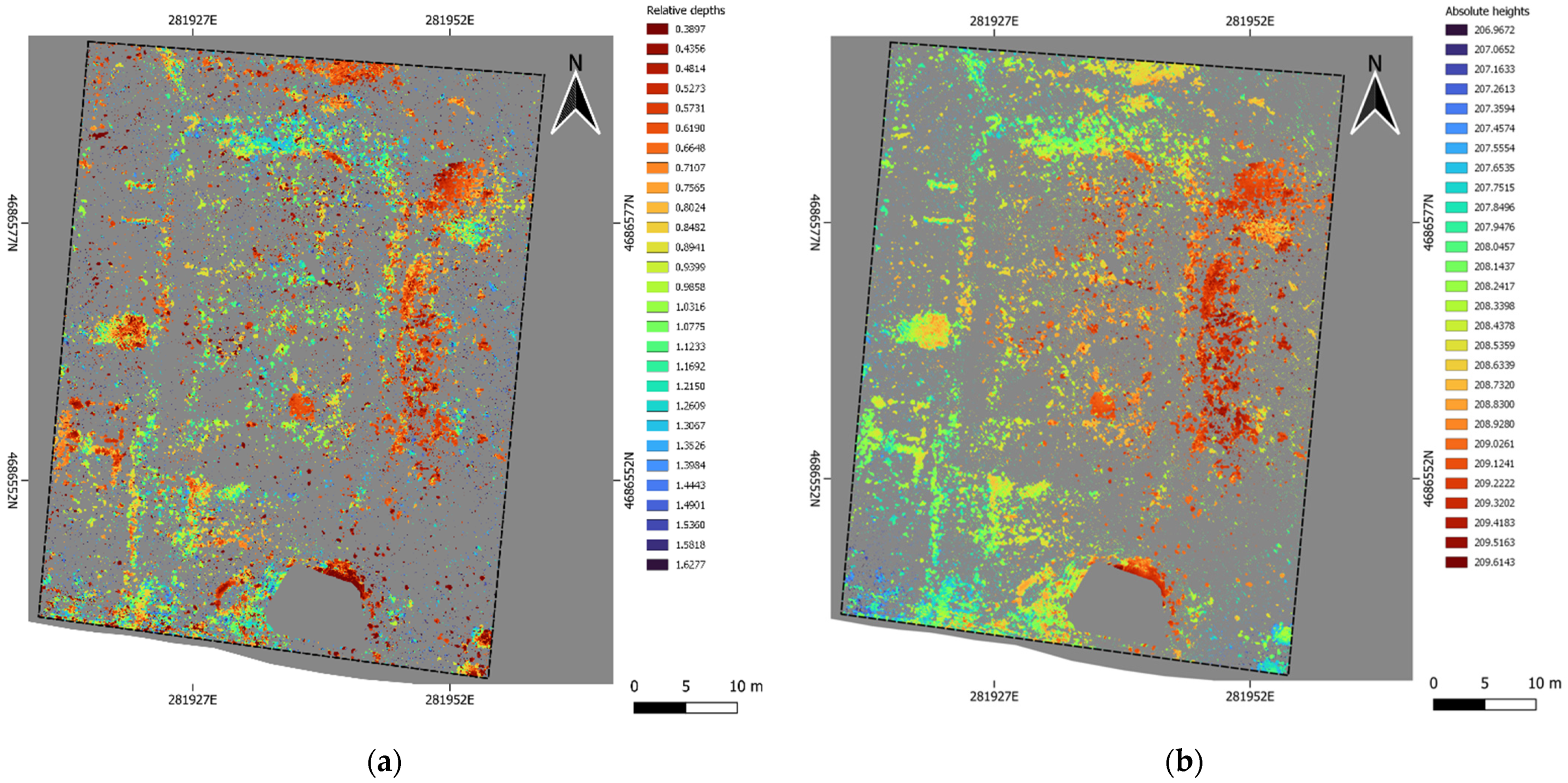
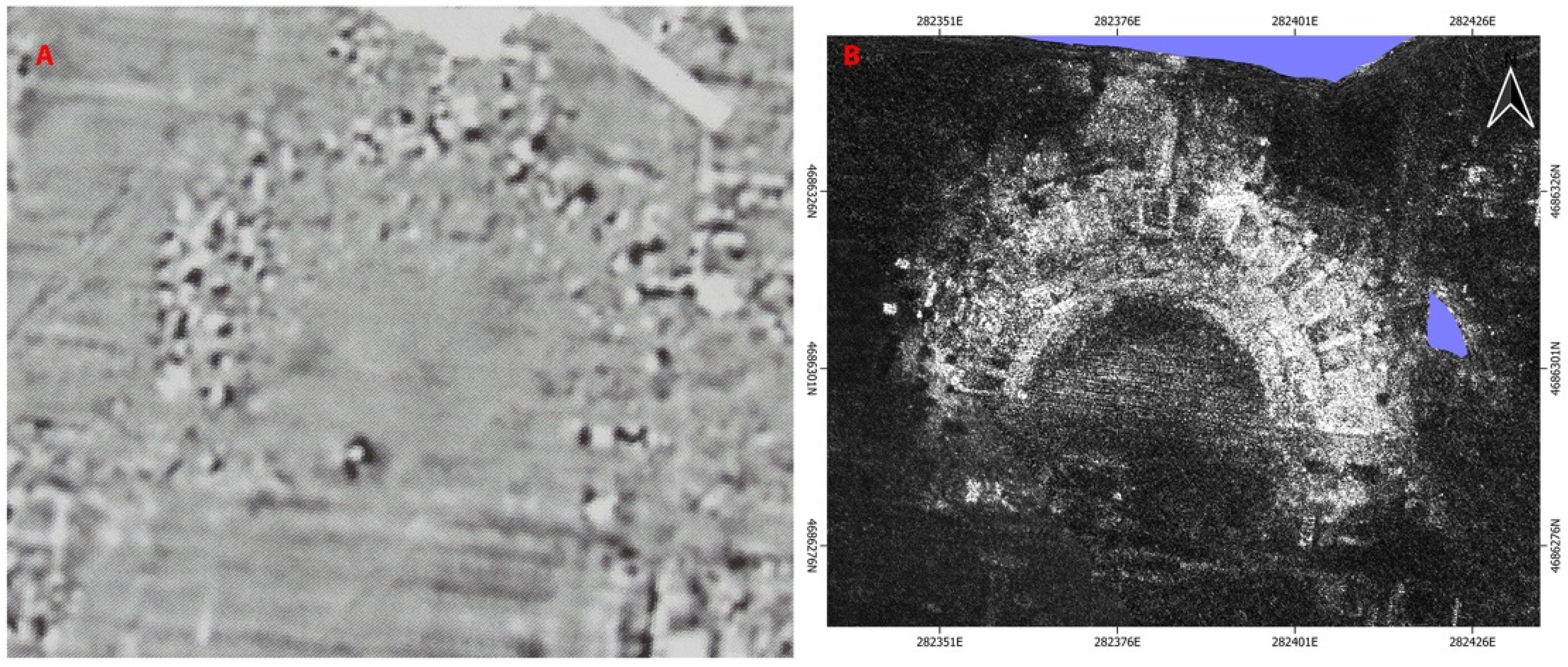
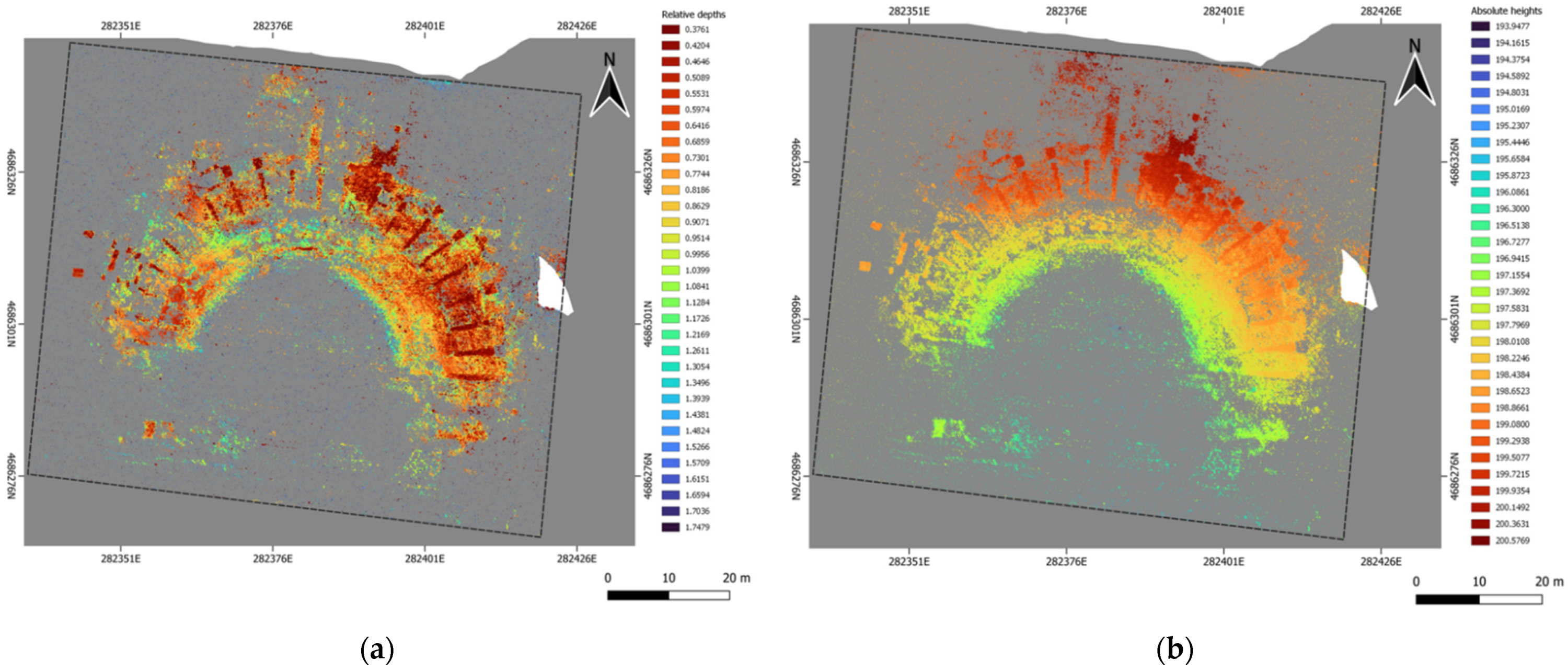
3.1. The Theater
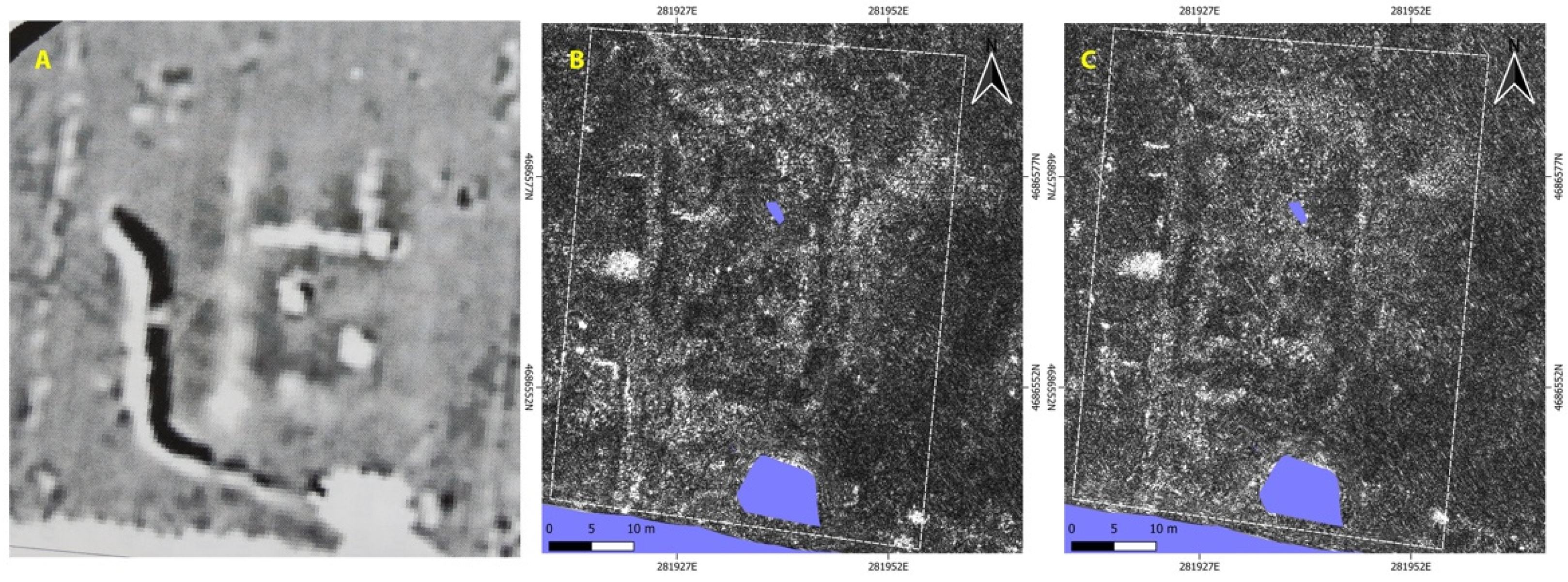
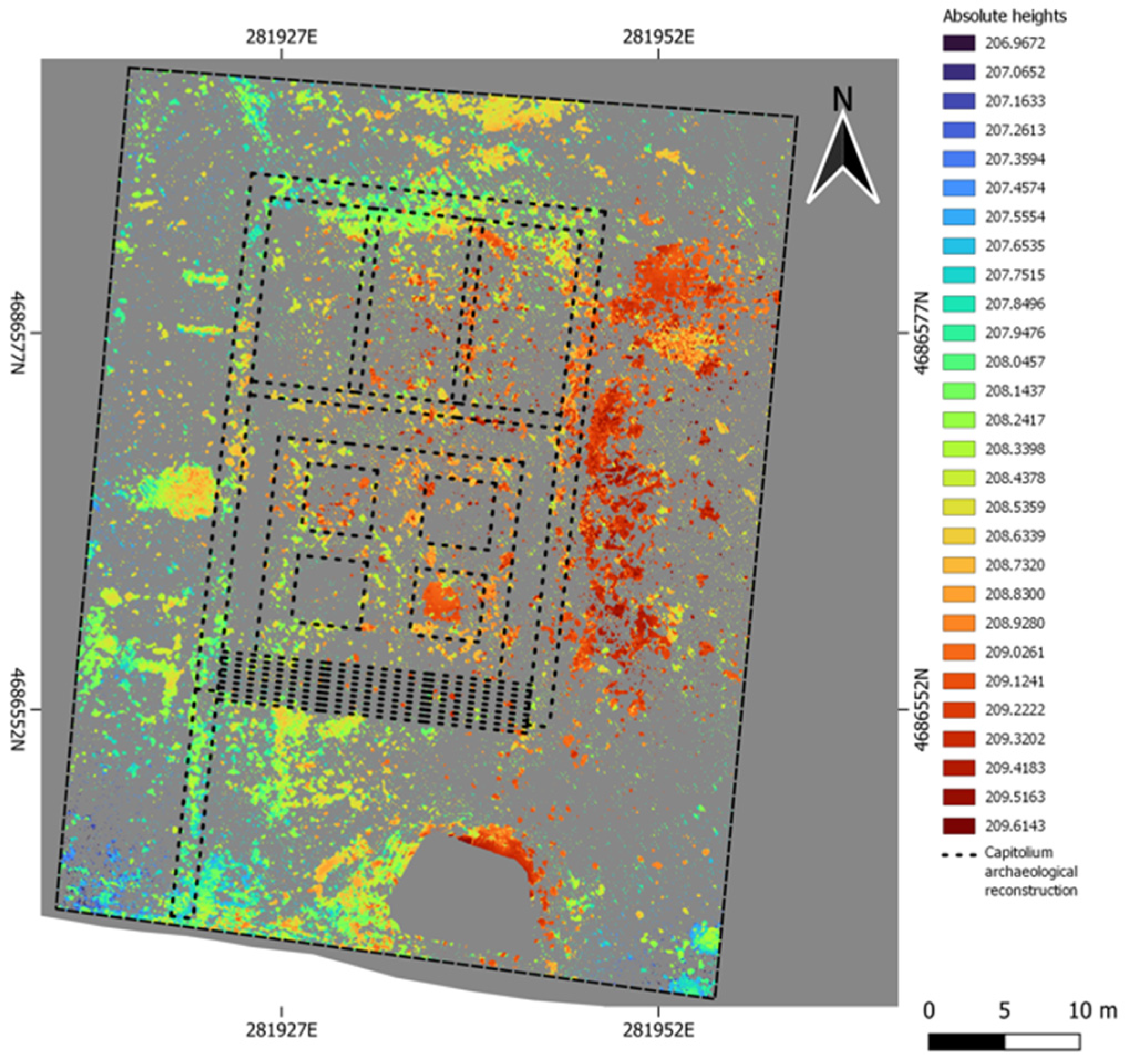
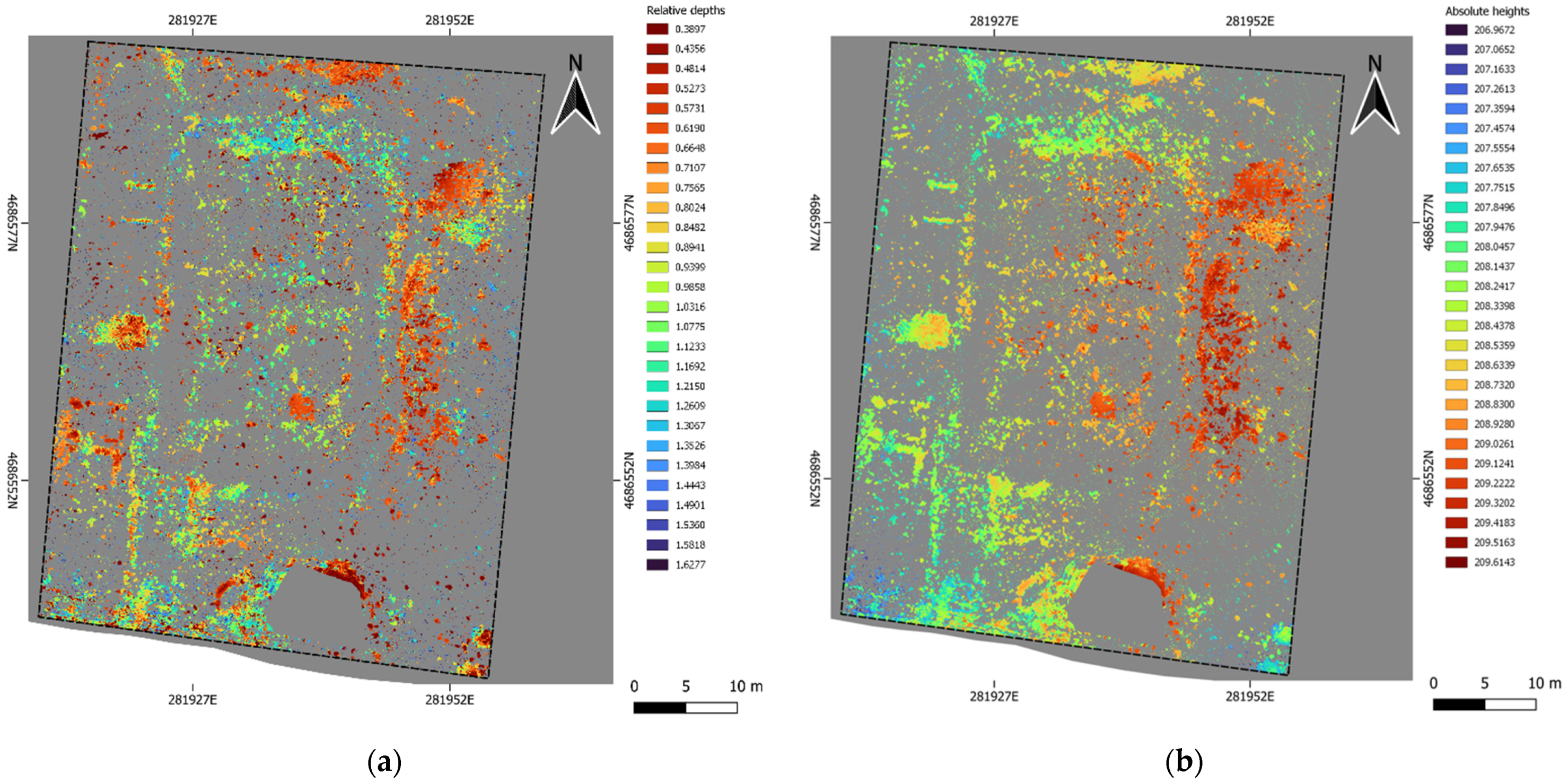
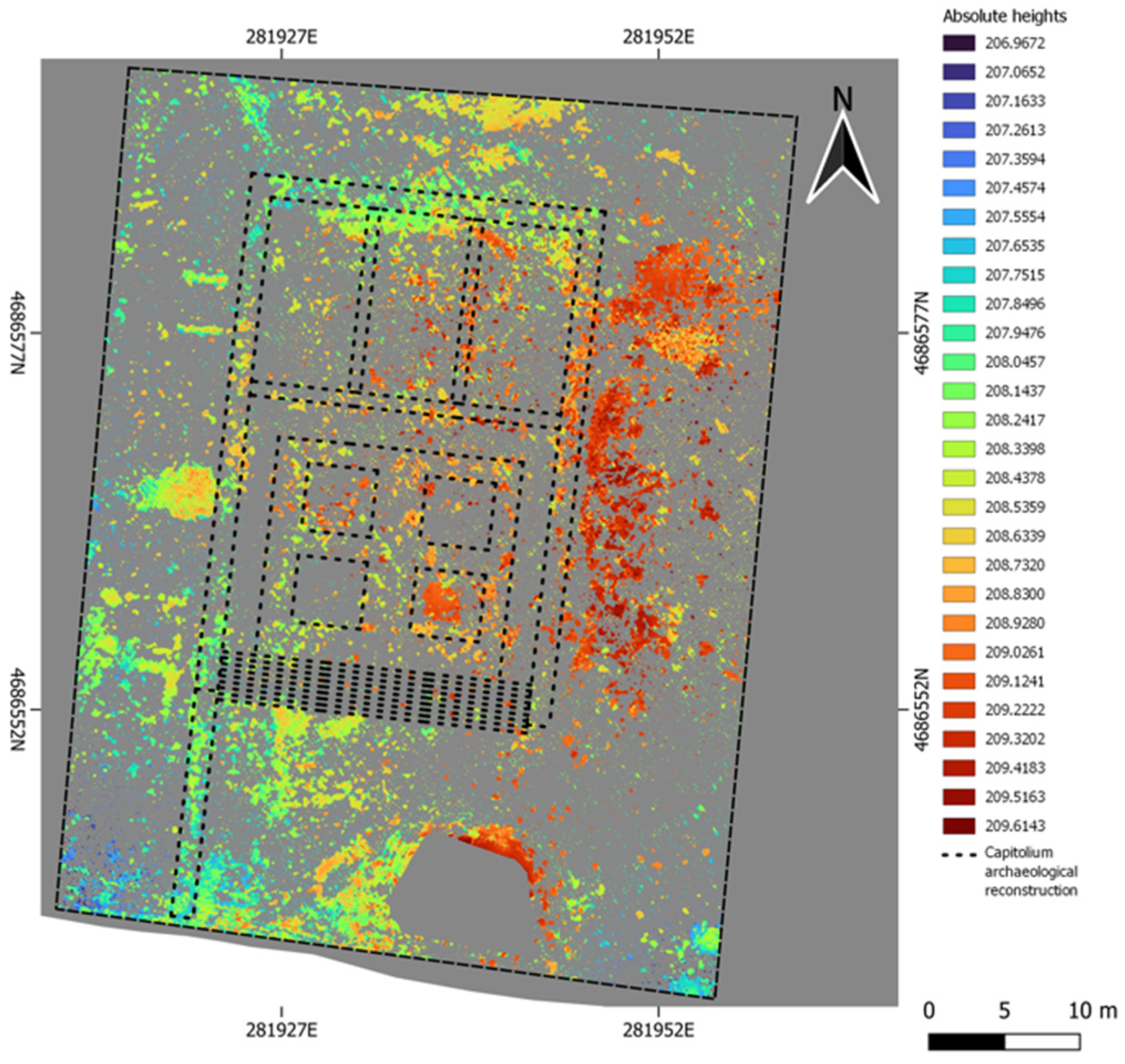
3.2. The “Capitolium”
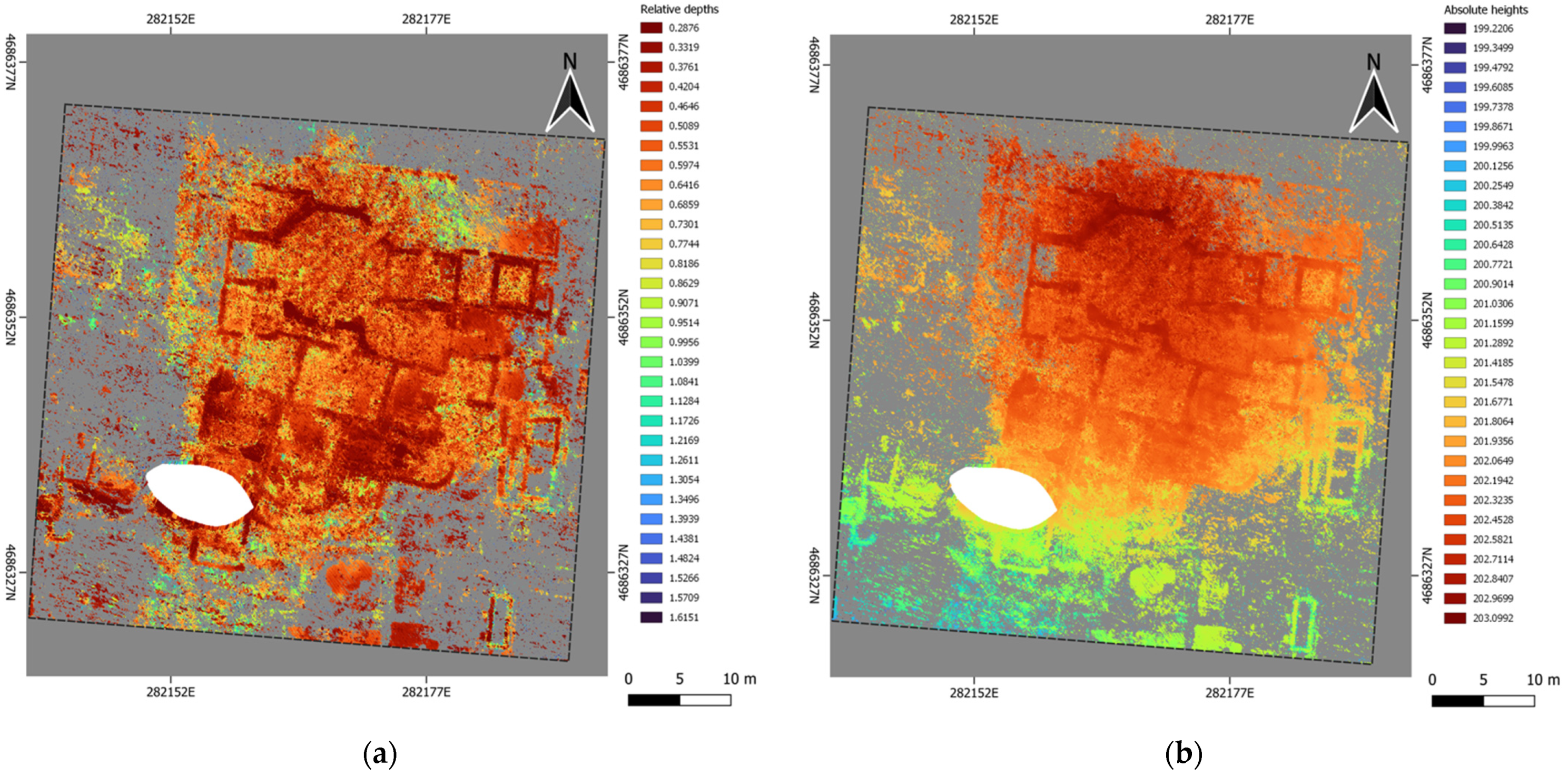
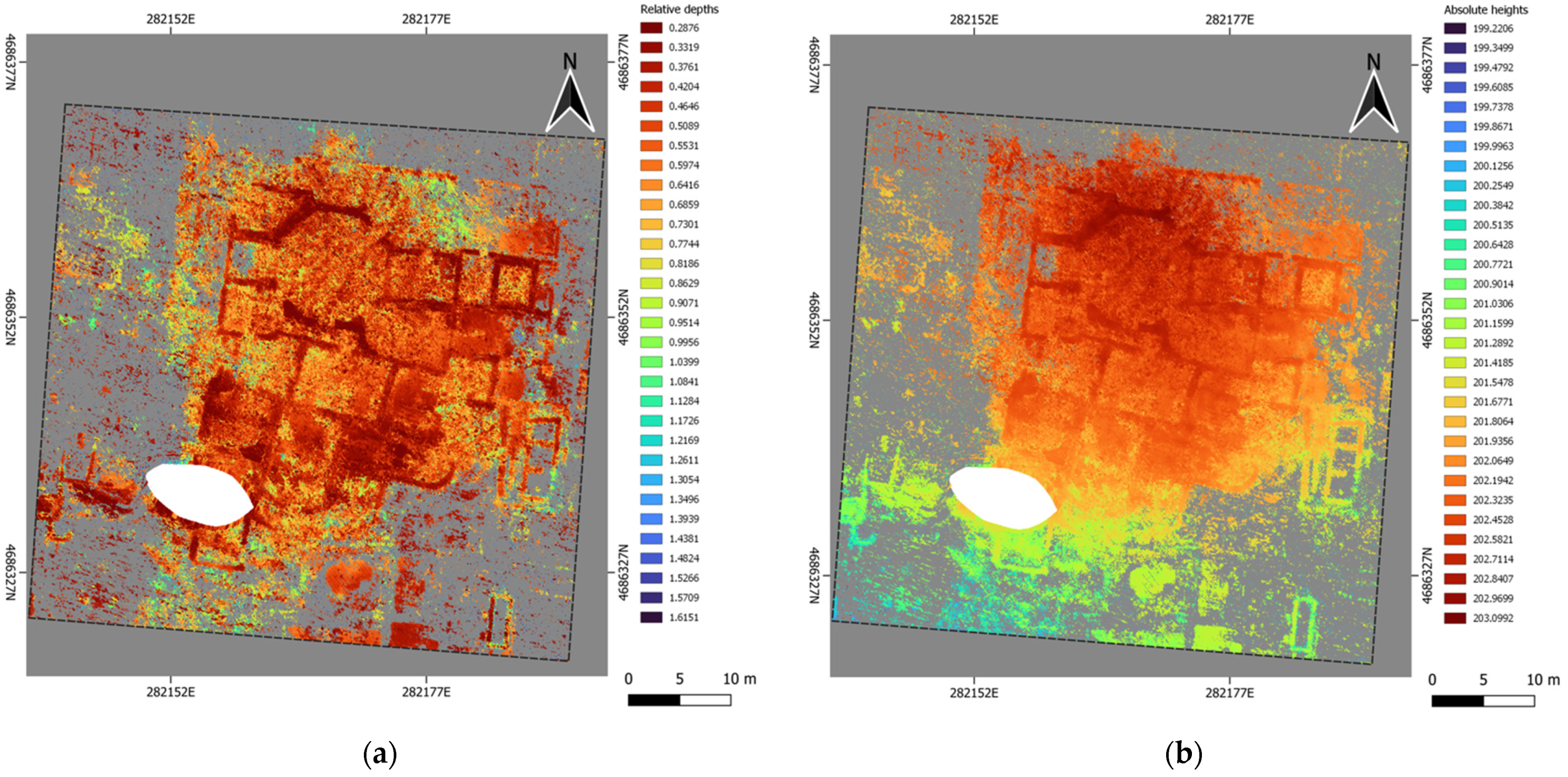
3.3. The Bath Complex
4. Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Conyers, L.B.; Goodman, D. Ground Penetrating Radar. In An Introduction for Archaeology; AltaMira Press: Walnut Creek, CA, USA; London, UK; New Delhi, India, 1997; ISBN 978-0761989288. [Google Scholar]
- Conyers, L.B. Ground-Penetrating Radar for Archaeology, 3rd ed.; Rowman and Littlefield: Lantham, MD, USA, 2013; ISBN 978-0759123489. [Google Scholar]
- Goodman, D.; Piro, S. GPR Remote Sensing in Archaeology; Springer: Heidelberg, Germany; New York, NY, USA; Dordrecht, The Netherlands; London, UK, 2013; ISBN 978-3-642-31857-3. [Google Scholar]
- Conyers, L.B. Ground-Penetrating Radar and Magnetometry for Buried Landscape Analysis; Springer: Heidelberg, Germany; New York, NY, USA; Dordrecht, The Netherlands; London, UK, 2018; ISBN 978-3-319-70890-4. [Google Scholar]
- Conyers, L.B.; Martínez, A. Georadar Aplicado en Geotecnia y Arqueología; GeoMantis: Monterrey, Mexico, 2021; ISBN 978-1-63972-317-1. [Google Scholar]
- Pérez, G.V.; Caselles, J.O.; Clapés, J.; Osorio, R.; Martínez, G.; Canas, J.A. Integrated near- surface geophysical survey of the Cathedral of Mallorca. J. Archaeol. Sci. 2009, 36, 1289–1299. [Google Scholar] [CrossRef]
- Gabellone, F.G.; Leucci, G.; Masini, N.; Persico, R.; Quarta, G.; Grasso, F. Nondestructive prospecting and virtual reconstruction of the chapel of the Holy Spirit in Lecce, Italy. Near Surface Geophys. 2013, 11, 231–238. [Google Scholar] [CrossRef]
- Lampropoulos, K.C.; Moropoulou, A.; Korres, M. Ground penetrating radar prospection of the construction phases of the Holy Aedicula of the Church of the Holy Sepulchre, in correlation with architectural analysis. Constr. Build. Mater. 2017, 155, 307–322. [Google Scholar] [CrossRef]
- Benedetto, A.; Pajewski, L. (Eds.) Civil Engineering Applications of Ground Penetrating Radar. In Springer Transactions in Civil and Environmental Engineering; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Solla, M.; Pérez-Gracia, V.P.; Fontul, S. A review of GPR application on transport infrastructures: Troubleshooting and best practices. Rem. Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Li, S.; Gu, X.; Xu, X.; Xu, D.; Zhang, T.; Liu, Z.; Dong, Q. Detection of concealed cracks from ground penetrating radar images based on deep learning algorithm. Construct. Build. Mater. 2021, 273, 121949. [Google Scholar] [CrossRef]
- Rasol, M.; Pais, J.C.; Pérez-Gracia, V.; Solla, M.; Fernandes, F.M.; Fontul, S.; Ayala-Cabrera, D.; Schmidt, F.; Assadollahi, H. GPR monitoring for road transport infrastructure: A systematic review and machine learning insights. Construct. Build. Mater. 2022, 324, 126686. [Google Scholar] [CrossRef]
- Wunderlich, T. MultichannelGPR—A New MATLAB-Tool for the Processing of GPR Data. ArcheoSciences 2021, 45, 279–283. [Google Scholar] [CrossRef]
- Nuzzo, L.; Leucci, G.; Negri, S.; Carrozzo, M.T.; Quarta, T. Application of 3D visualization techniques in the analysis of GPR data for archaeology. Ann. Geophys. 2002, 45, 321–337. [Google Scholar] [CrossRef]
- Leckebusch, J.; Weibel, A.; Bühler, F. Semi-automatic feature extraction from GPR data for archaeology. Near Surf. Geophys. 2008, 6, 75–84. [Google Scholar] [CrossRef]
- Küçükdemirci, M.; Sarris, A. Deep learning based automated analysis of archaeo-geophysical images. Archaeol. Prospect. 2020, 27, 107–118. [Google Scholar] [CrossRef]
- Verdonck, L.; Launaro, A.; Vermeulen, F.; Millett, M. Ground-penetrating radar survey at Falerii Novi: A new approach to the study of Roman cities. Antiquity 2020, 94, 705–723. [Google Scholar] [CrossRef]
- Bornik, A.; Neubauer, W. 3D Visualization Techniques for Analysis and Archaeological Interpretation of GPR Data. Remote Sens. 2022, 14, 1709. [Google Scholar] [CrossRef]
- Watters, M.S. Geovisualization: An Example from the Catholme Ceremonial Complex. Archaeol. Prospect. 2006, 13, 282–290. [Google Scholar] [CrossRef]
- Deiana, R.; Bonetto, J.; Mazzariol, A. Integrated Electrical Resistivity Tomography and Ground Penetrating Radar Measurements Applied to Tomb Detection. Surv. Geophys 2018, 39, 1081–1105. [Google Scholar] [CrossRef]
- Kelly, T.B.; Angel, M.N.; O’Connor, D.E.; Huff, C.C.; Morris, L.E.; Wach, G.D. A novel approach to 3D modelling ground-penetrating radar (GPR) data—A case study of a cemetery and applications for criminal investigation. Forensic Sci. Int. 2021, 325, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Ogden, J.; Strutt, K.; Keay, S.; Earl, G.; Kay, S. Geophysical prospection at Portus: An evaluation of an integrated approach to interpreting subsurface archaeological features. In Proceedings of the 37th Computer Applications to Archaeology Conference (CAA 2009), Williamsburg, VA, USA, 22–26 March 2009; Frischer, B., Webb, C.J., Koller, D., Eds.; Colonial Williamsburg Foundation: Williamsburg, VA, USA, 2010; pp. 1–17. [Google Scholar]
- De Angeli, S.; Battistin, F.; Serpetti, M.; Di Iorio, A.; Moresi, F.V. The RESEARCH project, Soil-related hazards and archaeological heritage in the challenge of Climate Change. In Proceedings of the Florence Heri-Tech 2020, the Future of Heritage Science and Technologies, IOP Conference Series, Materials Science and Engineering, Online, 14–16 October 2020. [Google Scholar] [CrossRef]
- De Angeli, S.; Battistin, F.; Moresi, F.V.; Fayad, P.; Serpetti, M. Valutazione integrata delle dinamiche di rischio di erosione del suolo in presenza di depositi archeologici. II metodo proposto dal progetto RESEARCH (REmote SEnsing techniques for ARCHaeology). In ARCHEOFOSS XIV 2020; Bogdani, J., Montalbano, R., Rosati, P., Eds.; Archeopress: Oxford, UK, 2021; pp. 13–23. ISBN 978-1-80327-125-5. [Google Scholar]
- De Angeli, S.; Serpetti, M.; Fayad, P.; Battistin, F. An Open-Source Approach for the Vulnerability Assessment of Archaeological Deposits Using Gpr Data in Qgis Environment. In Proceedings of the CAA2021, Digital Crossroads, Online, 14–18 June 2021. [Google Scholar]
- QGIS Geographic Information System. QGIS Association. 2022. Available online: http://www.qgis.org (accessed on 12 May 2022).
- QGIS 3.22. Geographic Information System Developers Manual. QGIS Association. 2022. Available online: https://docs.qgis.org/3.22/en/docs/developers_guide/index.html (accessed on 12 May 2022).
- Millett, M.; Verdonck, L.; Leone, N.; Launaro, A. Beneath the surface of Roman Republican cities (dataset). Archaeol. Data Serv. 2019, 59–61. [Google Scholar] [CrossRef]
- Schmidt, A.; Ernenwein, E. Guide to Good Practice: Geophysical Data in Archaeology, 2nd ed.; Archaeology Data Service; Available online: https://guides.archaeologydataservice.ac.uk/g2gp/Geophysics_Toc (accessed on 14 May 2022).
- GRASS-PROJECT. Geographic Resource Analysis Support System. 2013. Available online: https://grass.osgeo.org (accessed on 12 May 2022).
- GDAL-SOFTWARE-SUITE. Geospatial Data Abstraction Library. 2013. Available online: https://gdal.org (accessed on 12 May 2022).
- Prokhorenko, V.; Ivashchuk, V.; Korsun, S.; Musiyachenko, S.; Borodavka, V. Topographic correction of GPR profile based on odometer and inclinometer data. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 425–429. [Google Scholar] [CrossRef]
- Zhang, D.; Zhong, R.; Li, J.; Zeng, F. Topographic Correction of GPR Profiles Based on Laser Data. In Proceedings of the 35th International Symposium on Remote Sensing of Environment (ISRSE35), Beijing, China, 22–26 April 2013; Volume 17, p. 012251. [Google Scholar] [CrossRef]
- Keay, S.J.; Millett, M.; Poppy, S.; Robinson, J.; Taylor, J.; Terrenato, N. Falerii Novi: A new survey of the walled area. Pap. Br. Sch. Rome 2000, 68, 1–93. [Google Scholar] [CrossRef]
- OpenDroneMap. A command line toolkit to generate maps, point clouds, 3D models and DEMs from drone, balloon or kite images. OpenDroneMap/ODM GitHub Page. 2020. Available online: https://github.com/OpenDroneMap/ODM (accessed on 14 May 2022).
- Di Stefano Manzella, I. Falerii Novi Negli Scavi Degli Anni 1821–1830; L’Erma Di Bretschneider: Roma, Italy, 1979; Volume 1821–1830, pp. 1–188. ISBN 9788870622508. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Angeli, S.; Serpetti, M.; Battistin, F. A Newly Developed Tool for the Post-Processing of GPR Time-Slices in A GIS Environment. Remote Sens. 2022, 14, 3459. https://doi.org/10.3390/rs14143459
De Angeli S, Serpetti M, Battistin F. A Newly Developed Tool for the Post-Processing of GPR Time-Slices in A GIS Environment. Remote Sensing. 2022; 14(14):3459. https://doi.org/10.3390/rs14143459
Chicago/Turabian StyleDe Angeli, Stefano, Matteo Serpetti, and Fabiana Battistin. 2022. "A Newly Developed Tool for the Post-Processing of GPR Time-Slices in A GIS Environment" Remote Sensing 14, no. 14: 3459. https://doi.org/10.3390/rs14143459
APA StyleDe Angeli, S., Serpetti, M., & Battistin, F. (2022). A Newly Developed Tool for the Post-Processing of GPR Time-Slices in A GIS Environment. Remote Sensing, 14(14), 3459. https://doi.org/10.3390/rs14143459