
Investigating the Shallow-Water Bathymetric Capability of Zhuhai-1 Spaceborne Hyperspectral Images Based on ICESat-2 Data and Empirical Approaches: A Case Study in the South China Sea

Abstract
:1. Introduction
2. Materials and Methods
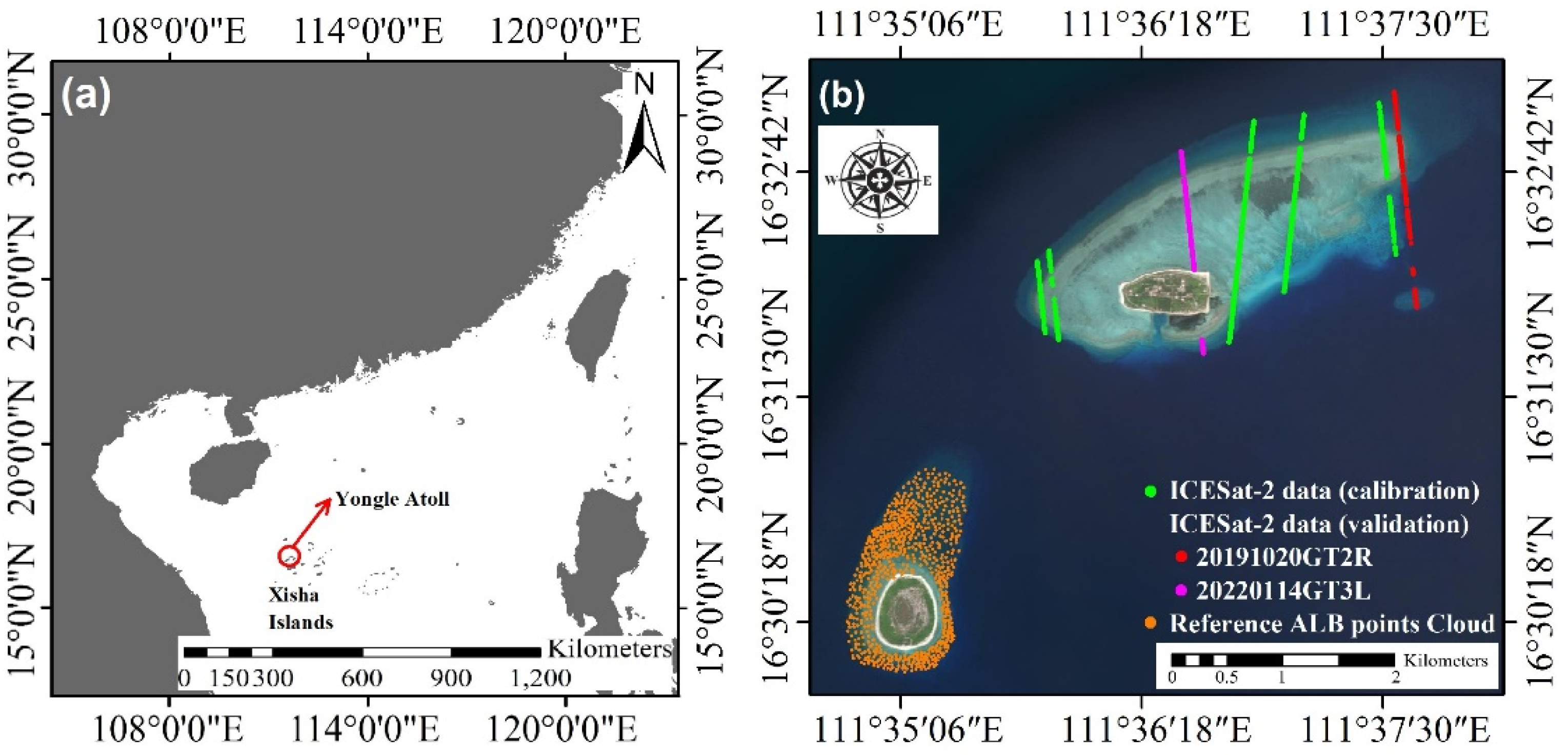
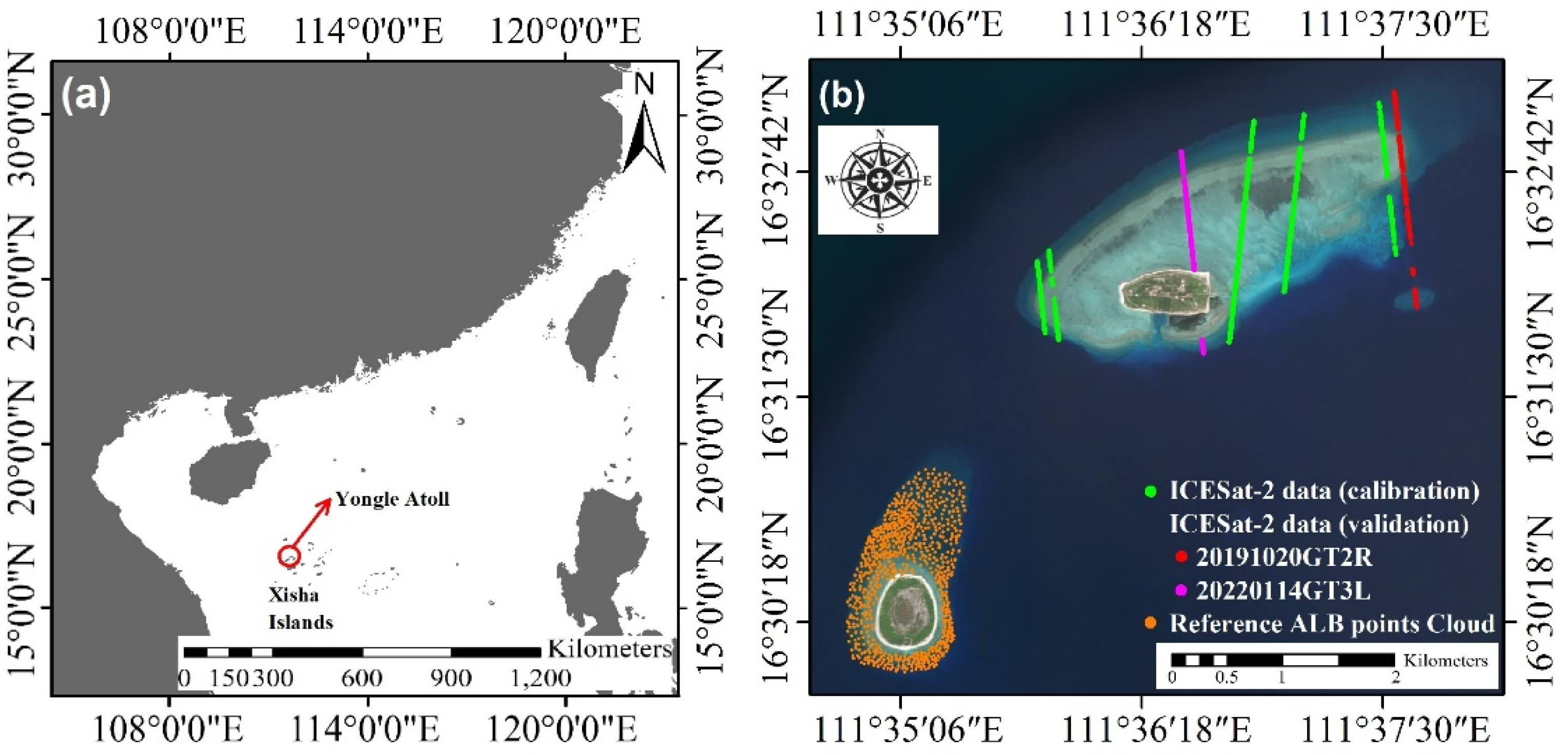
2.1. Study Area
2.2. ICESat-2 ATL03 Dataset
2.3. Spaceborne Images and Reference ALB Data
2.4. Satellite-Derived Bathymetry Models
2.5. Data Pre-Processing
2.6. Evaluation of the Performances of the SDB Models
3. Results
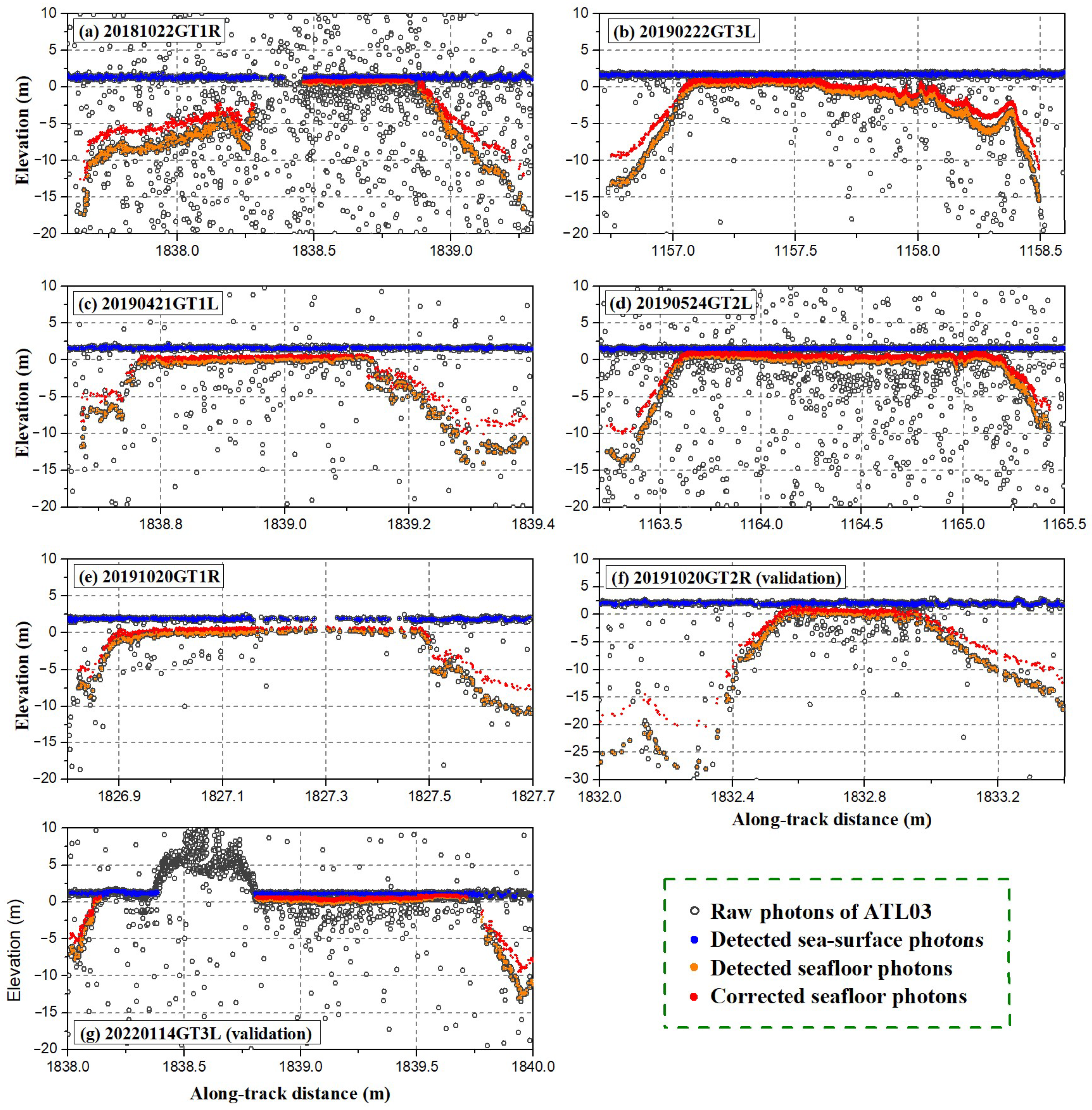
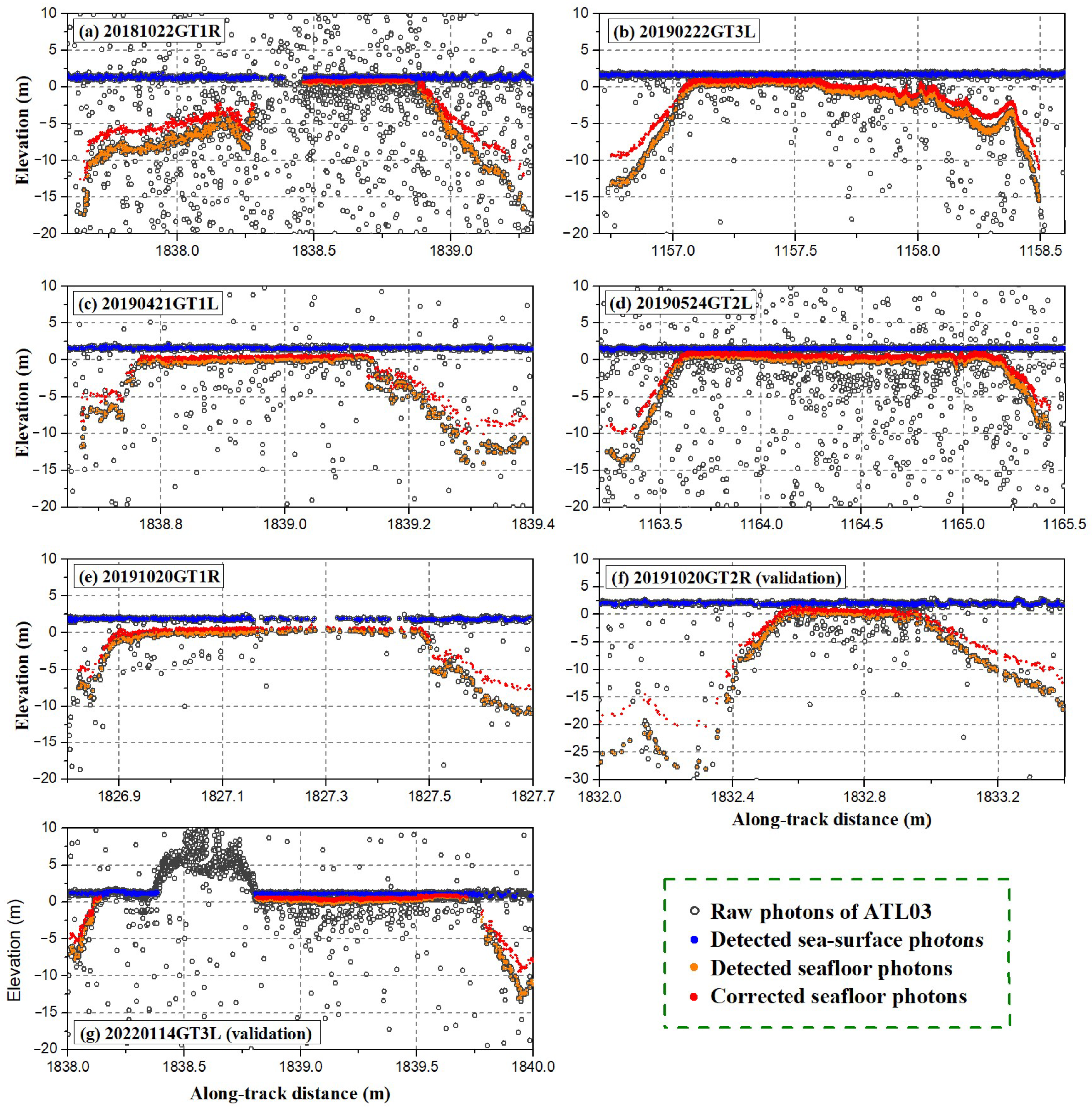
3.1. Signal Photon Detection and Bathymetry of ATL03
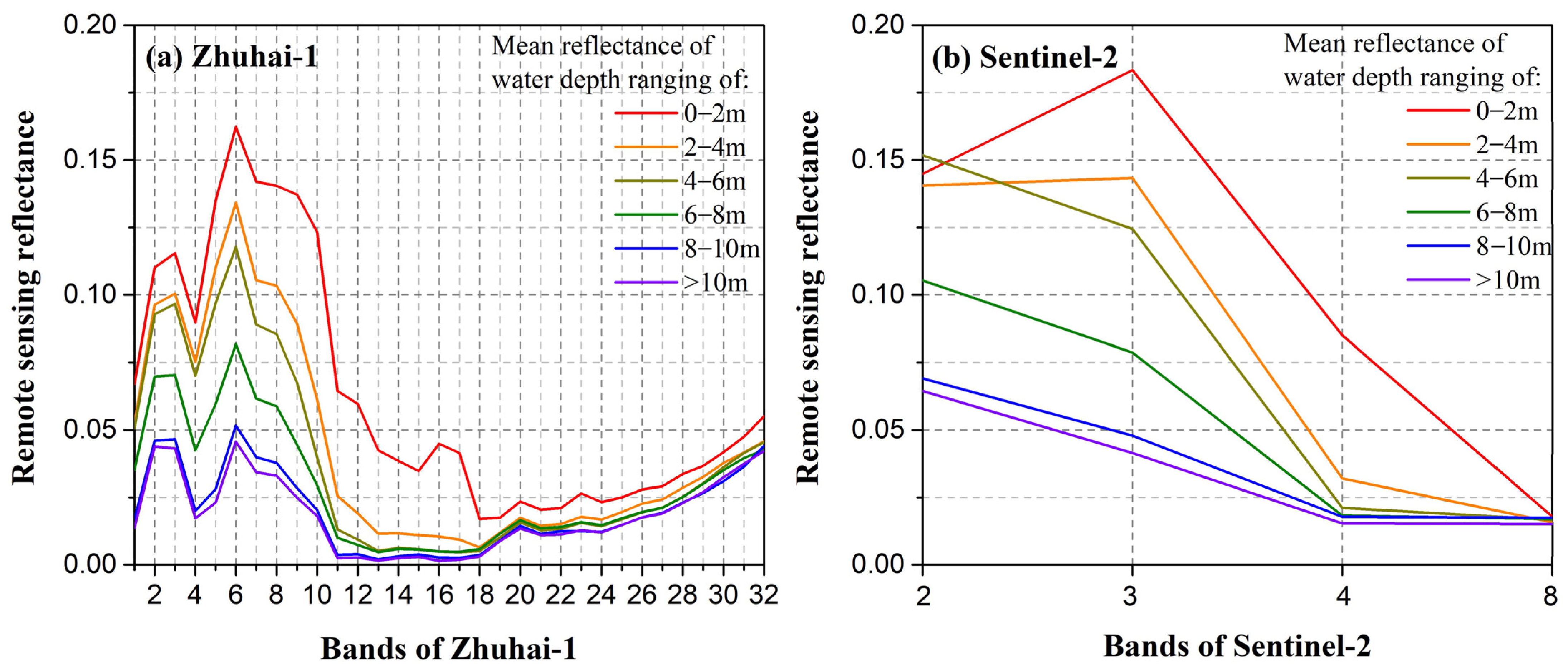
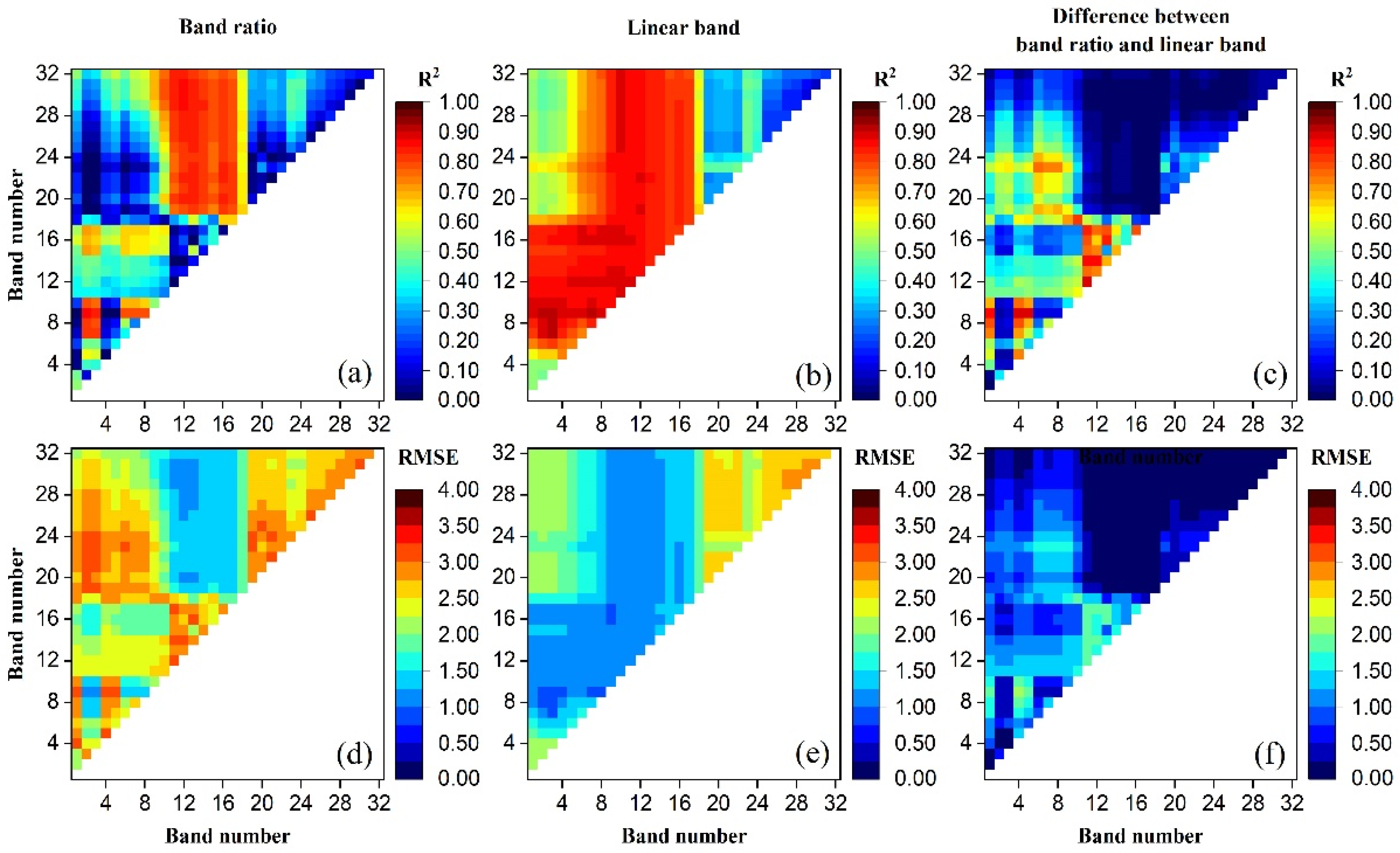
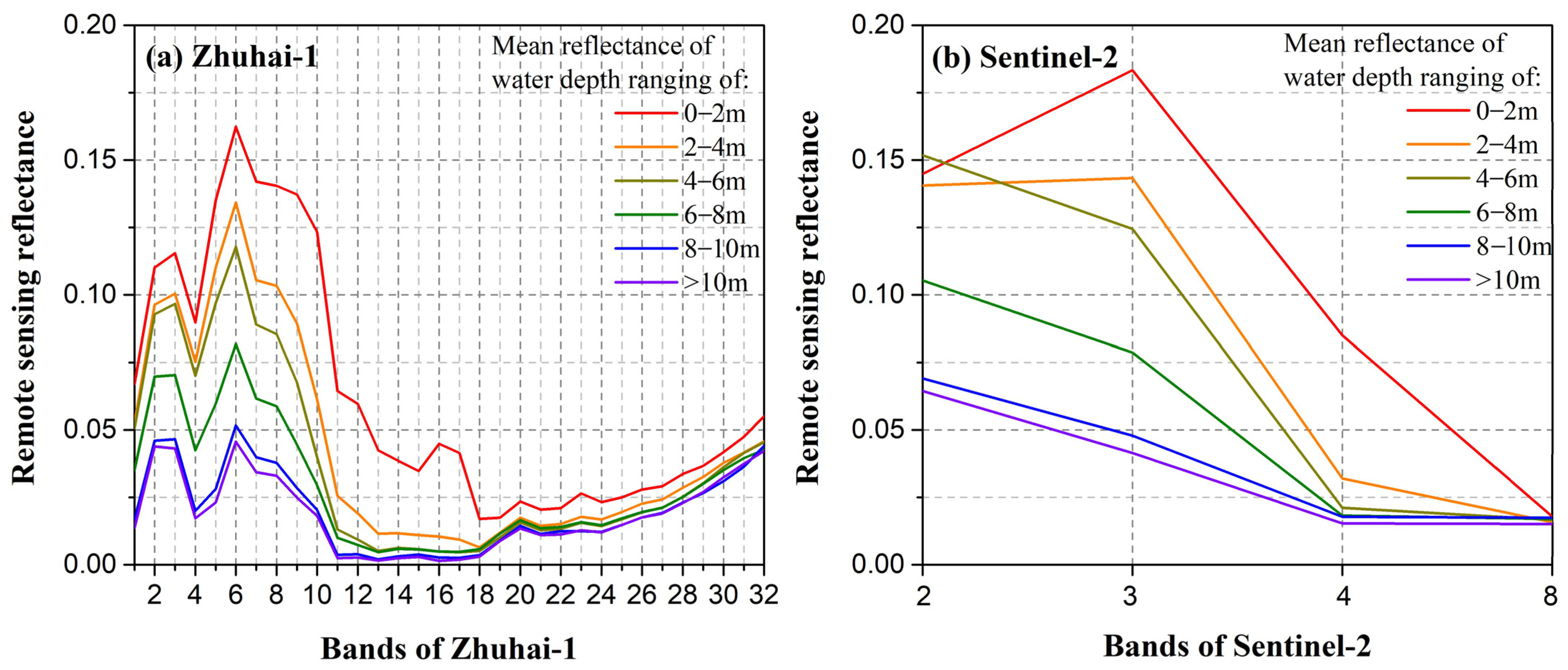
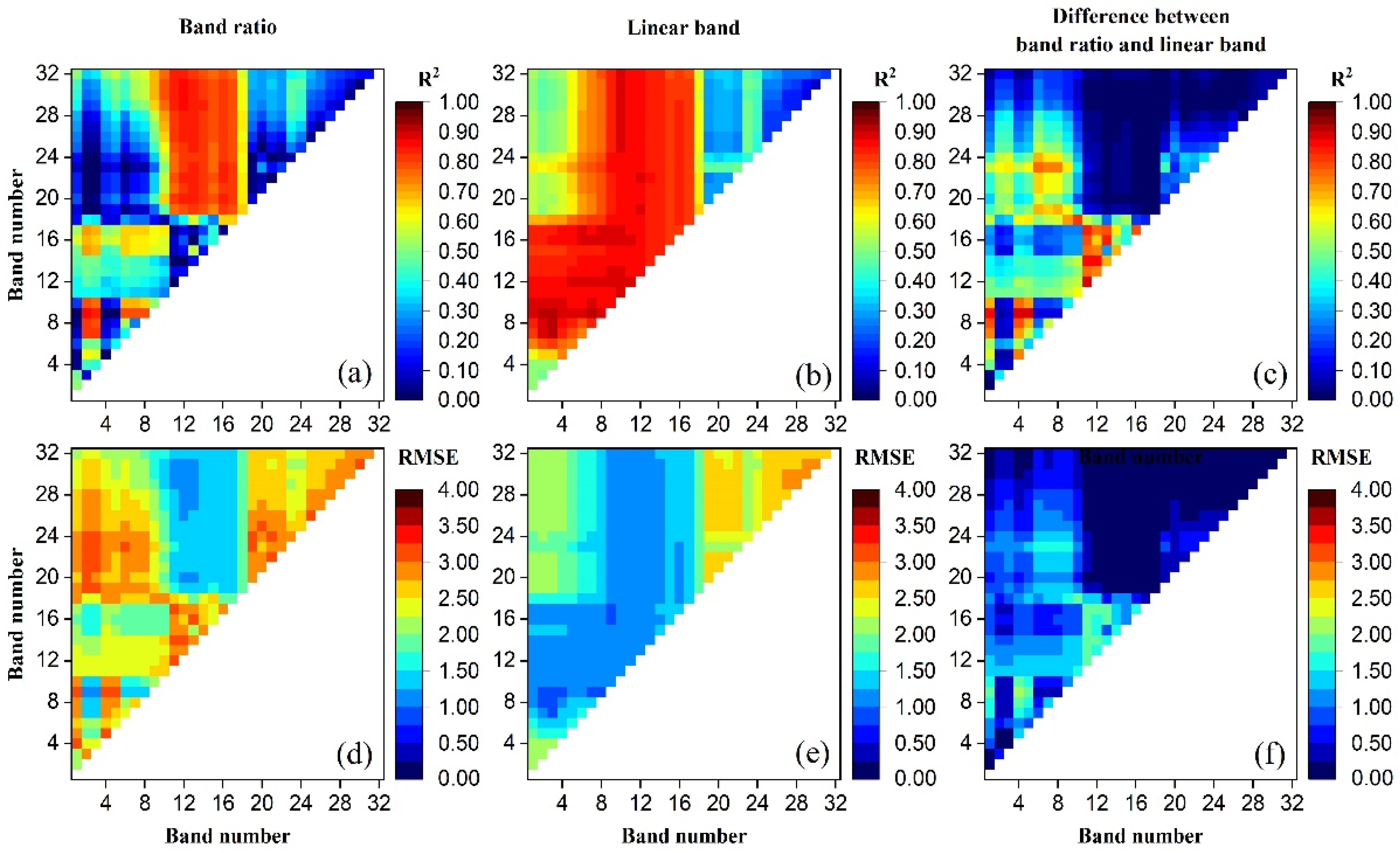
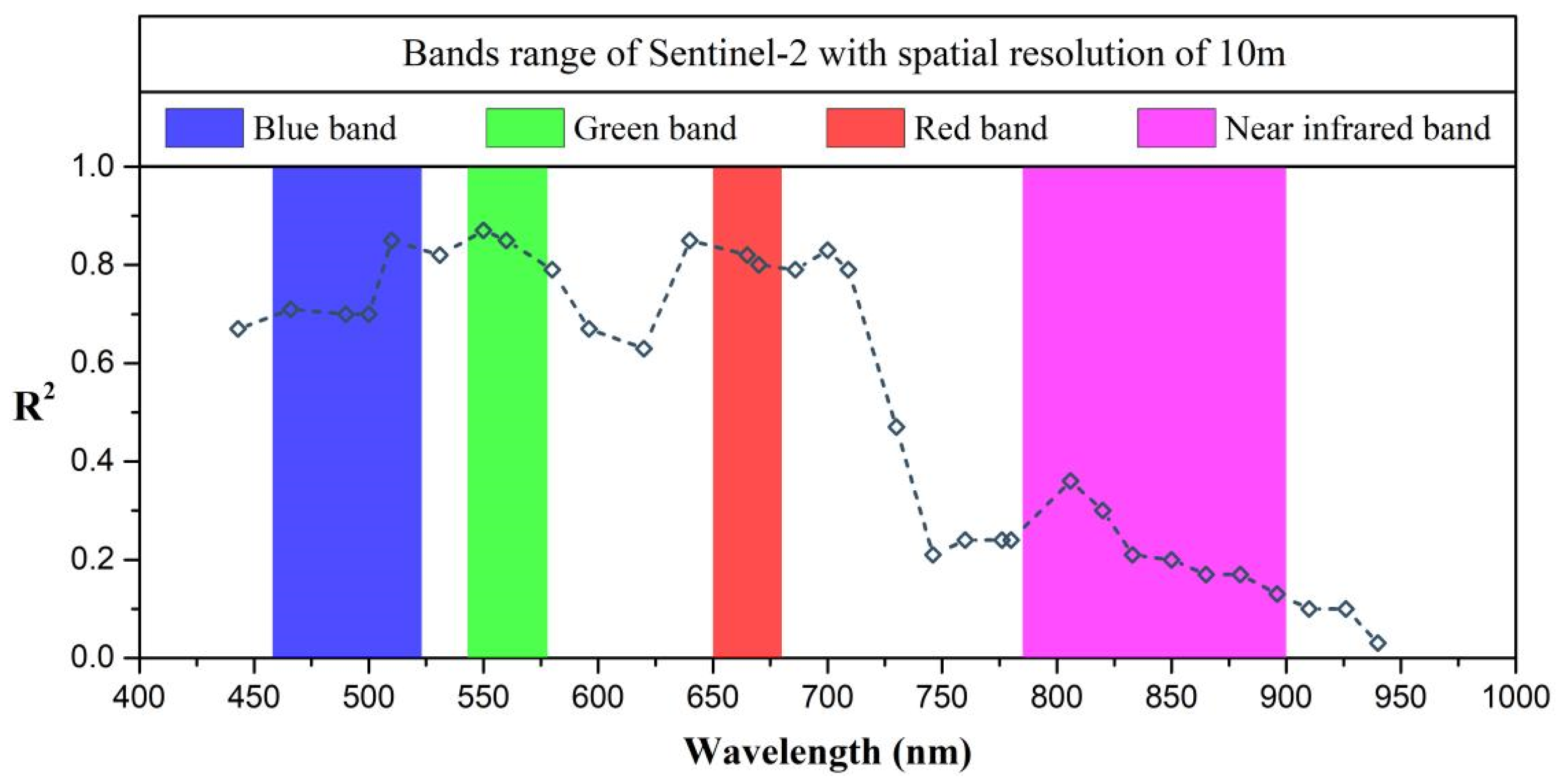
3.2. Band Selection for Zhuhai-1 Bathymetry
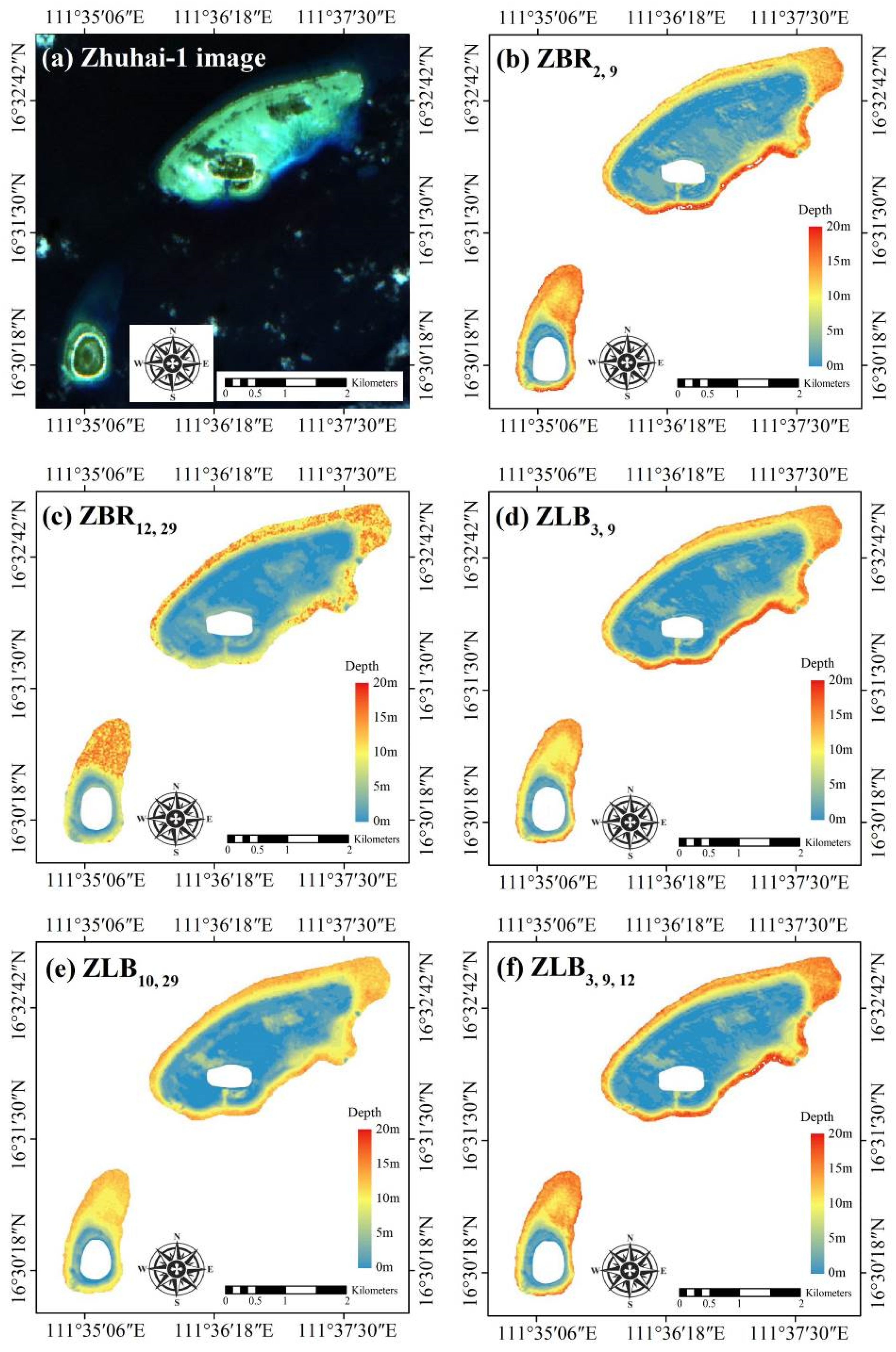
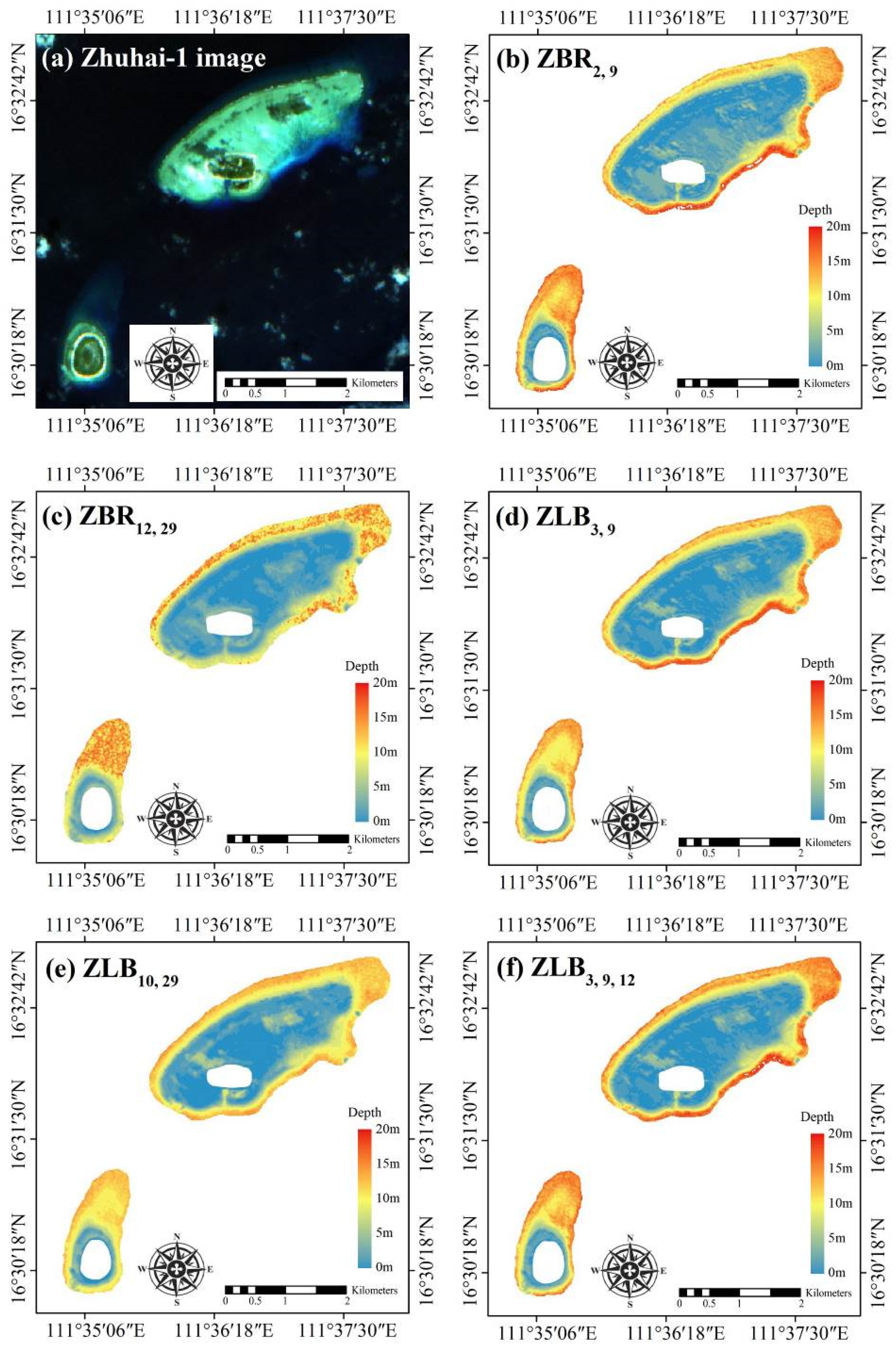
3.3. Calibration of the SDB Models and Bathymetric Mapping
3.4. Validation and Error Analysis of the SDB Models
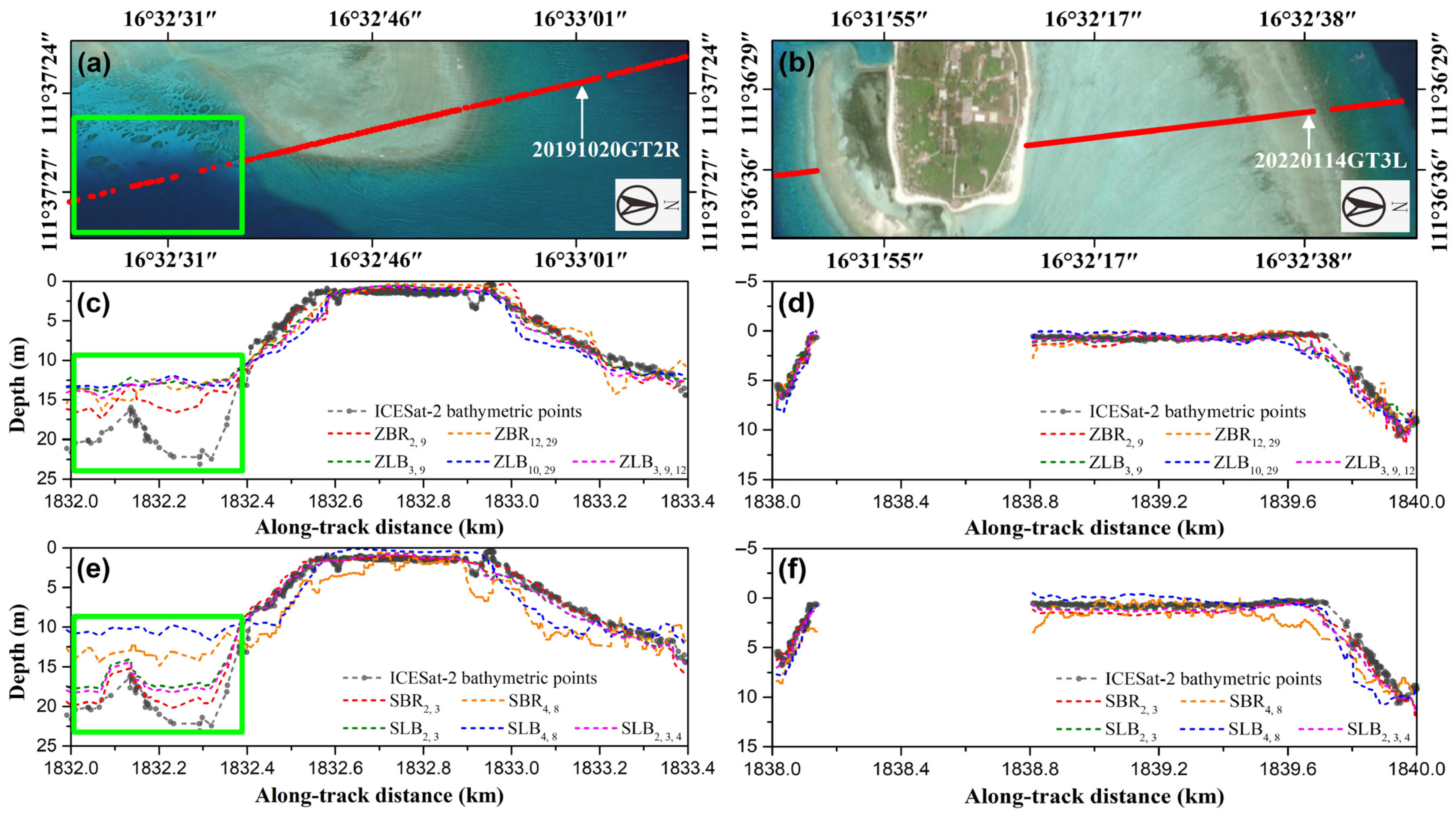
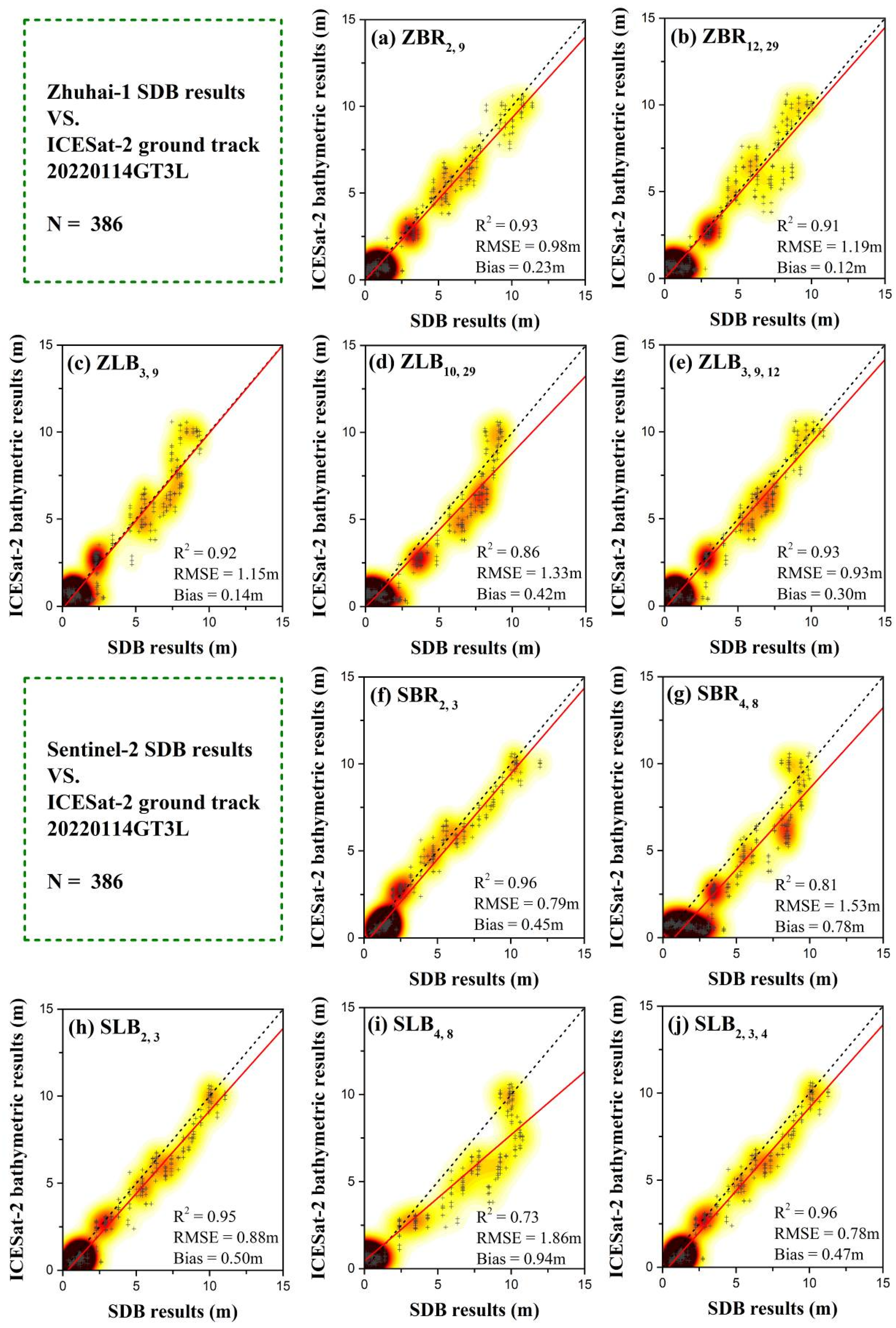
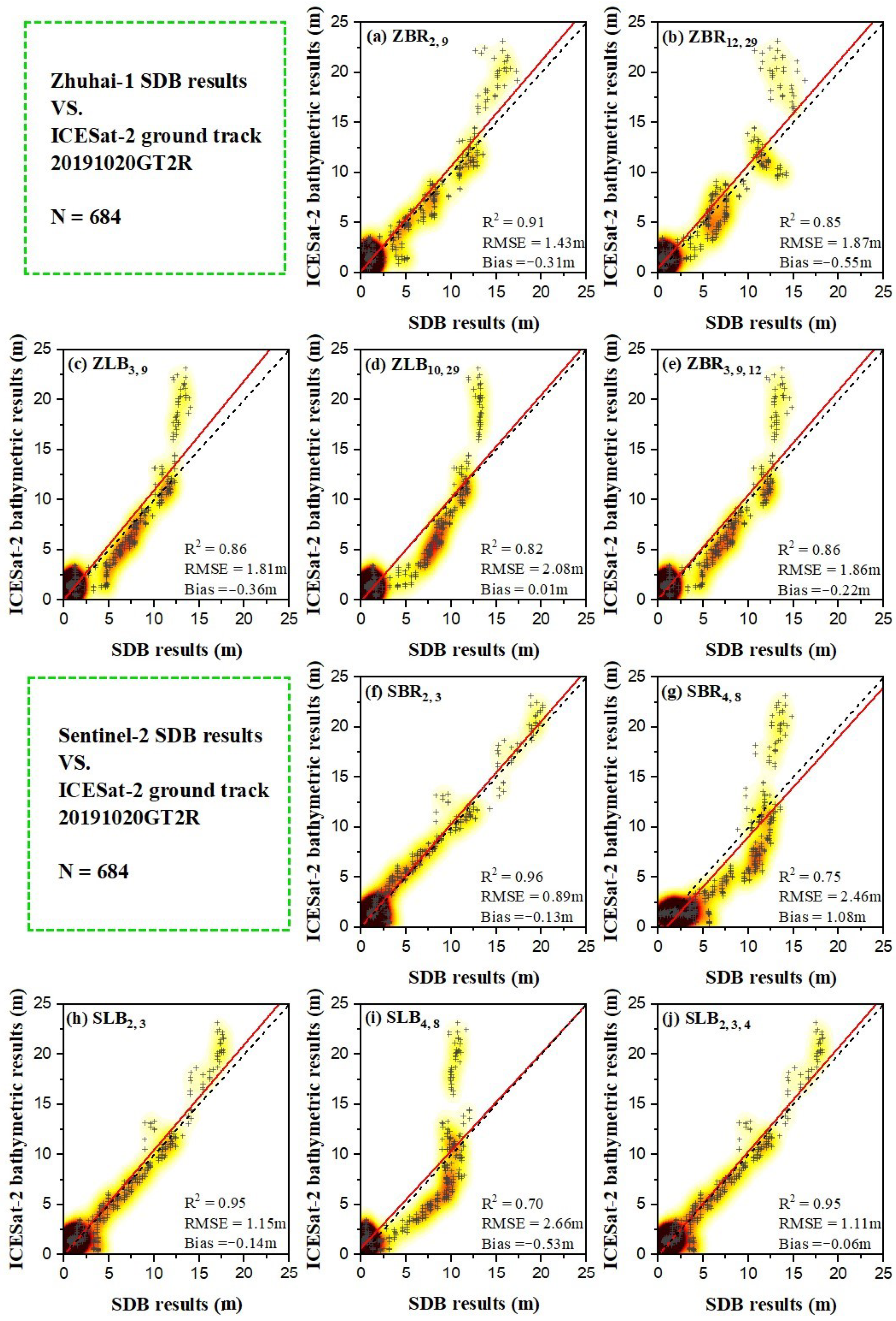
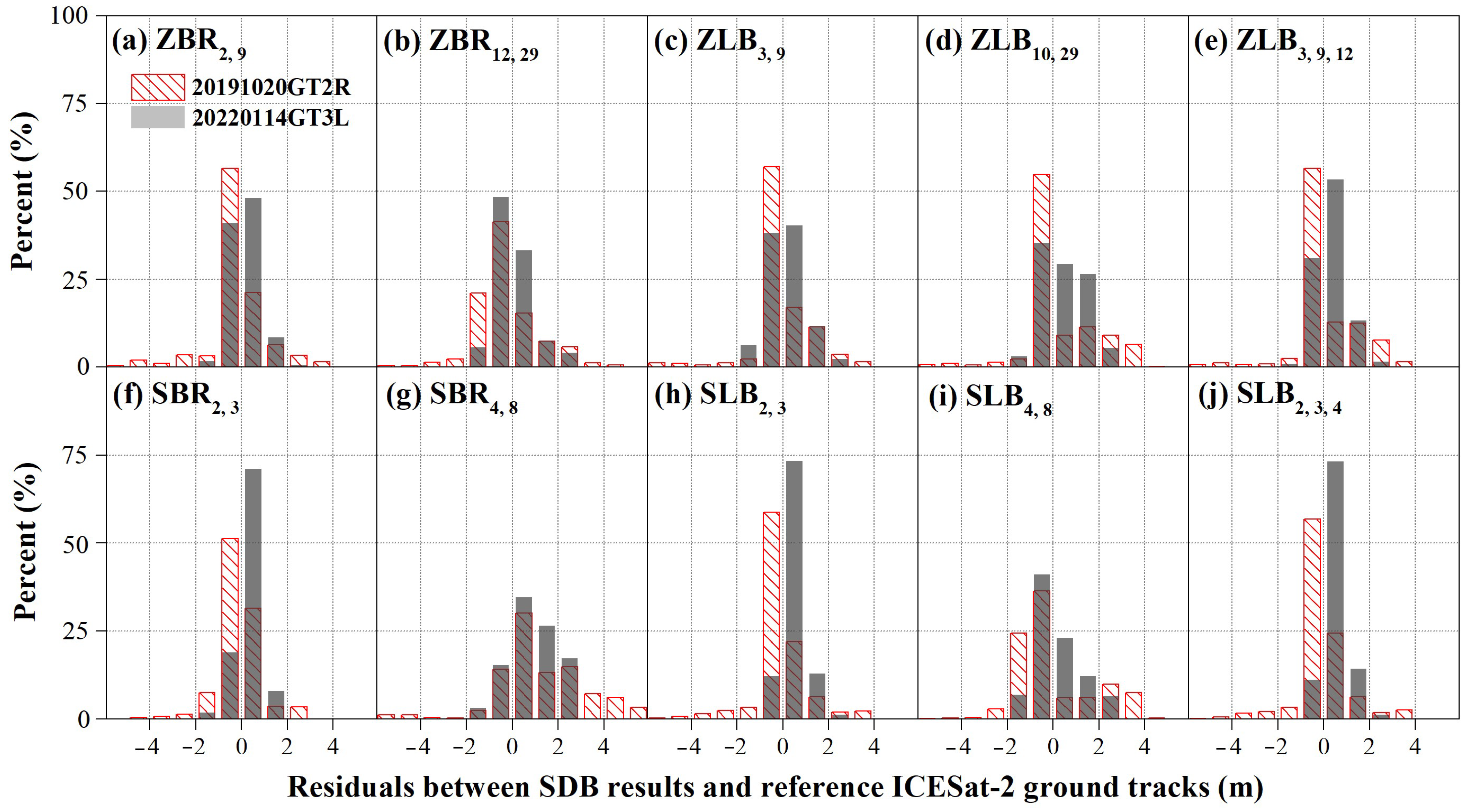
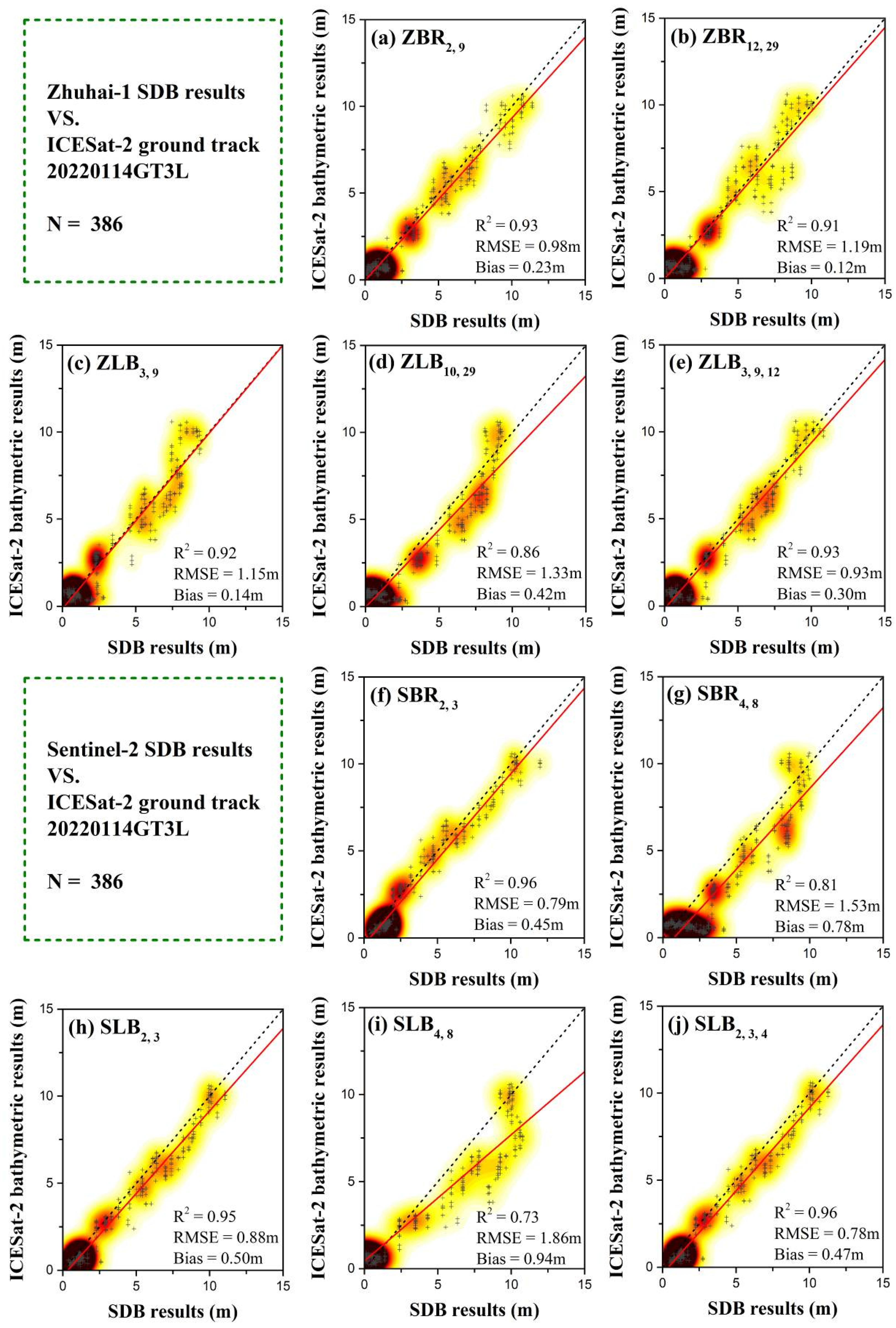
3.4.1. Validation Using ATL03 Ground Tracks
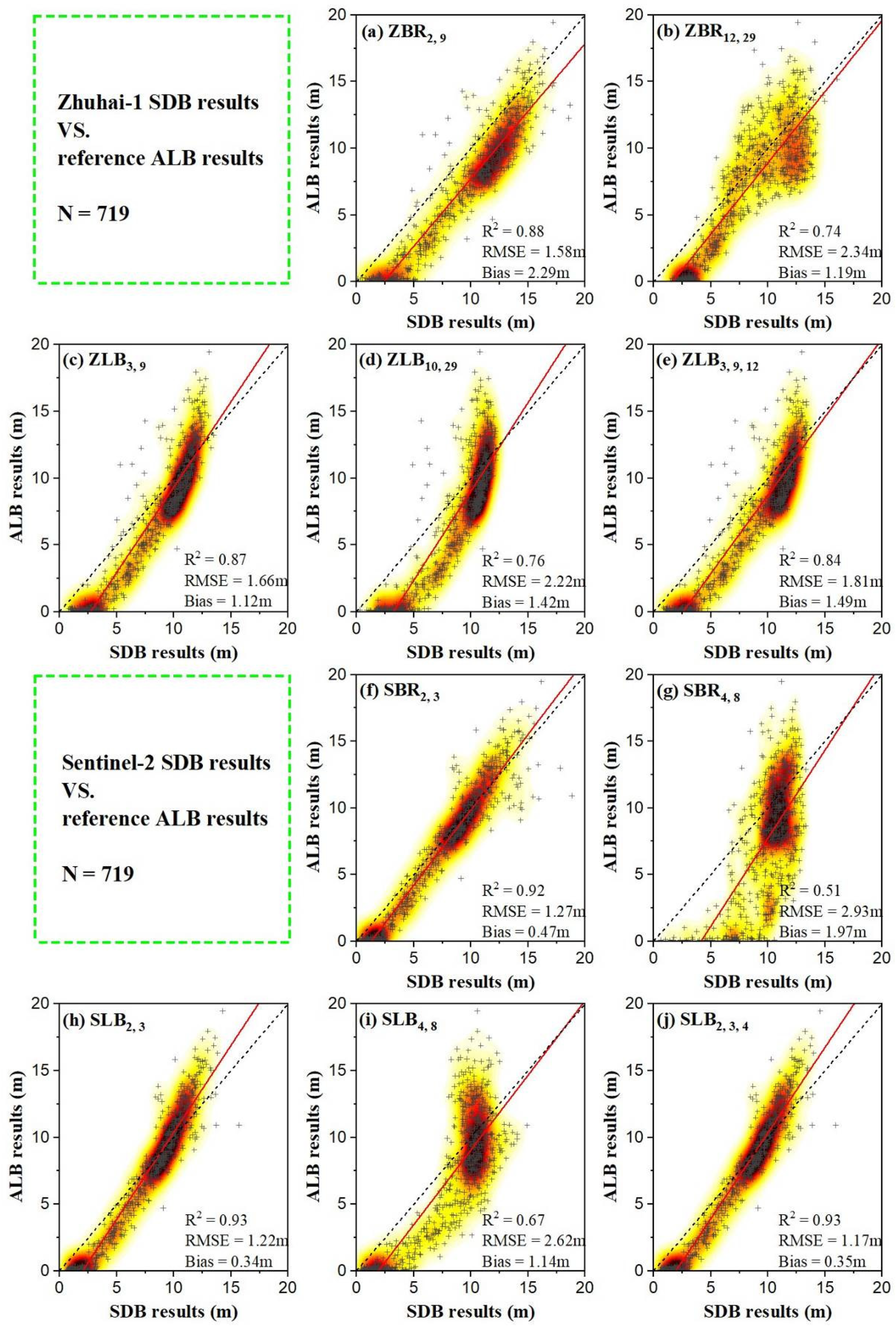
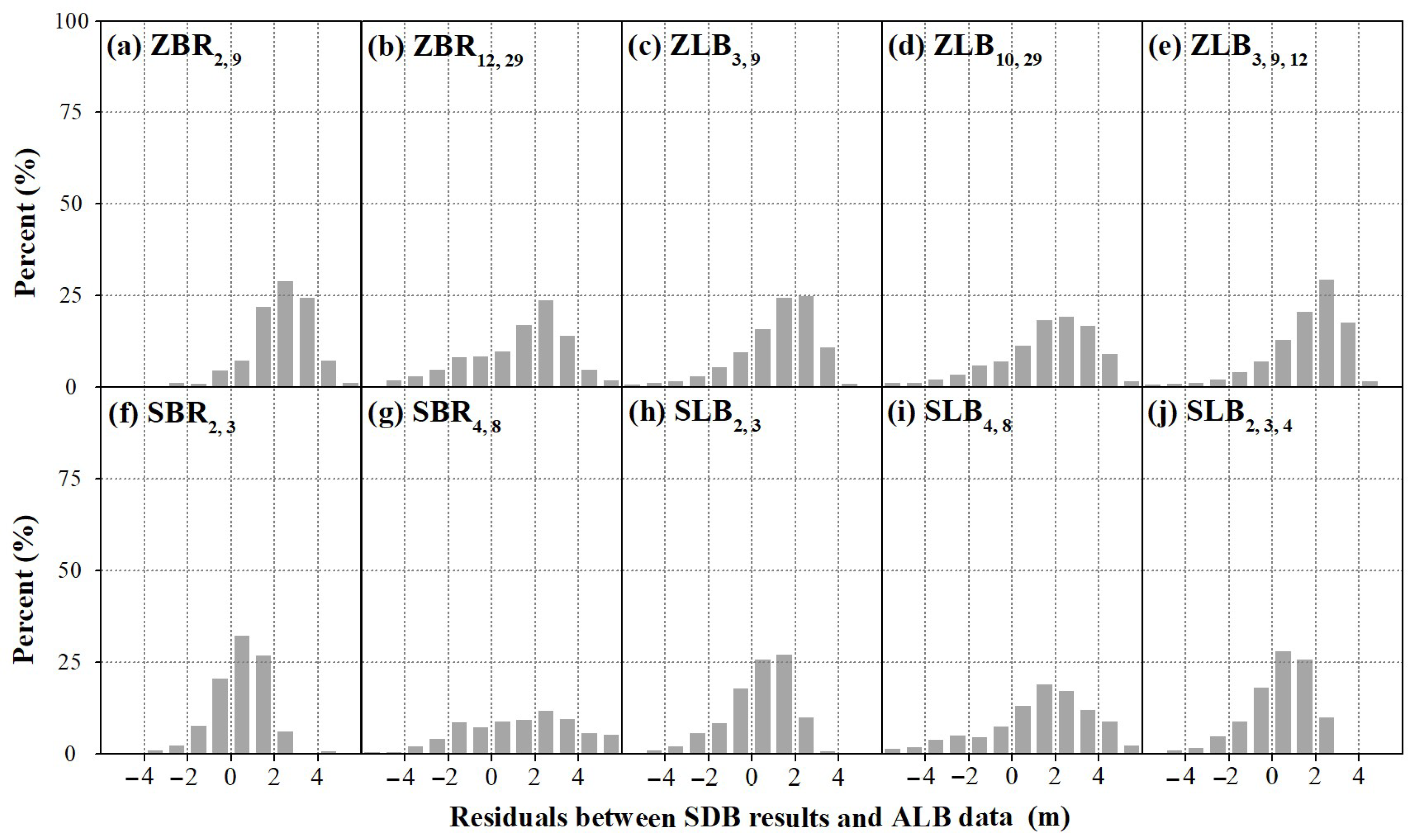
3.4.2. Validation Using ALB Data
4. Discussion
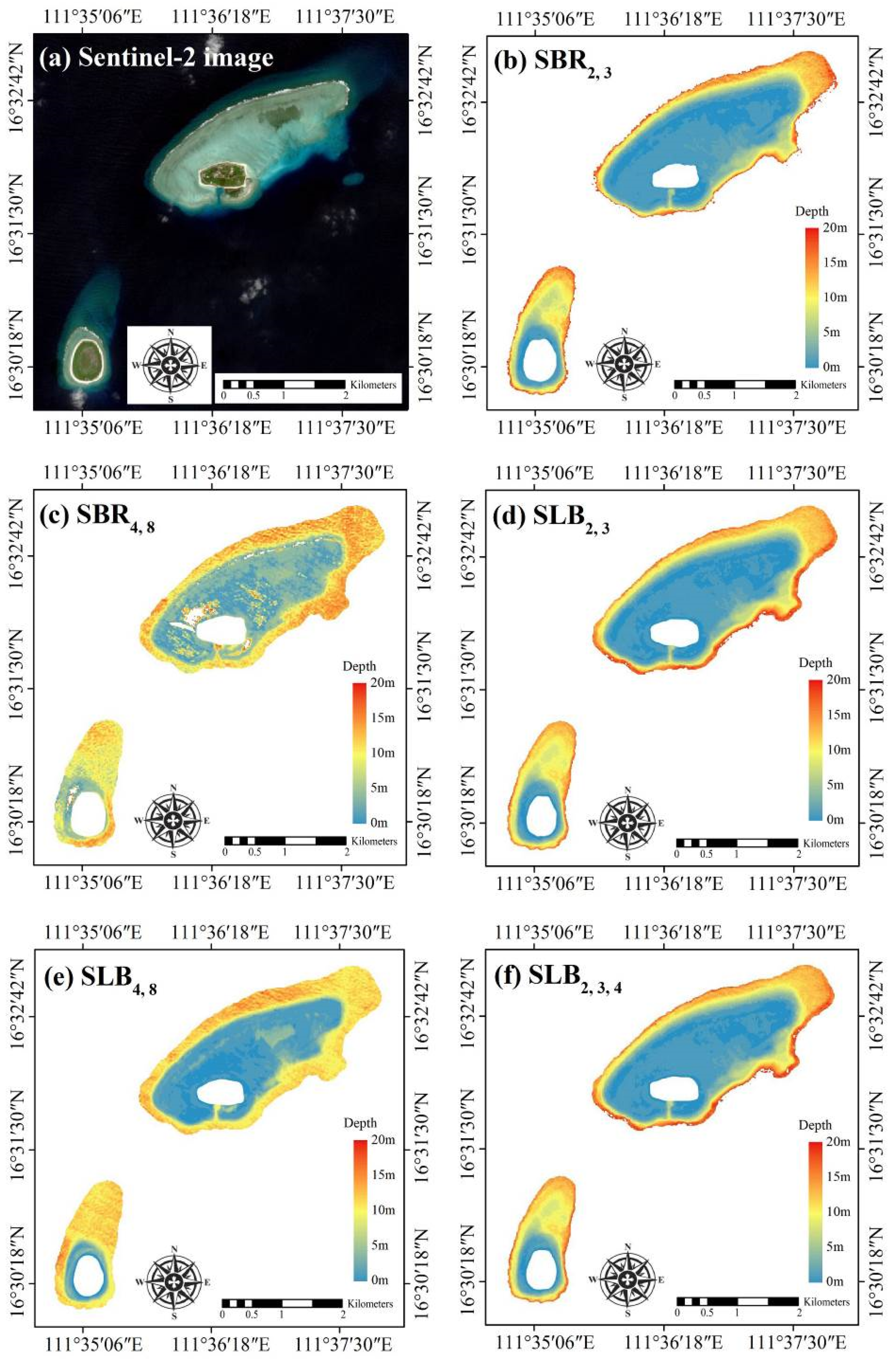
4.1. Comparison of Bathymetric Capability between Zhuhai-1 and Sentinel-2
4.2. SDB Error Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, W.; Xu, N.; Ma, Y.; Yang, B.; Zhang, Z.; Wang, X.H.; Li, S. A maximum bathymetric depth model to simulate satellite photon-counting lidar performance. ISPRS J. Photogramm. Remote Sens. 2021, 174, 182–197. [Google Scholar] [CrossRef]
- Nicholls, R.J.; Cazenave, A. Sea-level rise and its impact on coastal zones. Science 2010, 328, 1517–1520. [Google Scholar] [CrossRef] [PubMed]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote sensing of shallow waters–A 50 year retrospective and future directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Westfeld, P.; Maas, H.G.; Richter, K.; Weiß, R. Analysis and correction of ocean wave pattern induced systematic coordinate errors in airborne LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2017, 128, 314–325. [Google Scholar] [CrossRef]
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Shang, X.; Zhao, J.; Zhang, H. Obtaining high-resolution seabed topography and surface details by co-registration of side-scan sonar and multibeam echo sounder images. Remote Sens. 2019, 11, 1496. [Google Scholar] [CrossRef] [Green Version]
- Allouis, T.; Bailly, J.S.; Pastol, Y.; Le Roux, C. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Processes Landf. J. Br. Geomorphol. Res. Group 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating satellite-derived bathymetry (SDB) with the google earth engine and sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef] [Green Version]
- Eugenio, F.; Marcello, J.; Martin, J. High-resolution maps of bathymetry and benthic habitats in shallow-water environments using multispectral remote sensing imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3539–3549. [Google Scholar] [CrossRef]
- Manessa, M.D.M.; Kanno, A.; Sagawa, T.; Sekine, M.; Nurdin, N. Simulation-based investigation of the generality of Lyzenga’s multispectral bathymetry formula in Case-1 coral reef water. Estuar. Coast. Shelf Sci. 2018, 200, 81–90. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. Retrieval of nearshore bathymetry from Sentinel-2A and 2B satellites in South Florida coastal waters. Estuar. Coast. Shelf Sci. 2019, 226, 106277. [Google Scholar] [CrossRef]
- Casal, G.; Hedley, J.D.; Monteys, X.; Harris, P.; Cahalane, C.; McCarthy, T. Satellite-derived bathymetry in optically complex waters using a model inversion approach and Sentinel-2 data. Estuar. Coast. Shelf Sci. 2020, 241, 106814. [Google Scholar] [CrossRef]
- Casal, G.; Harris, P.; Monteys, X.; Hedley, J.; Cahalane, C.; McCarthy, T. Understanding satellite-derived bathymetry using Sentinel 2 imagery and spatial prediction models. GIScience Remote Sens. 2020, 57, 271–286. [Google Scholar] [CrossRef]
- Manessa, M.D.M.; Kanno, A.; Sekine, M.; Haidar, M.; Yamamoto, K.; Imai, T.; Higuchi, T. Satellite-derived bathymetry using random forest algorithm and worldview-2 Imagery. Geoplan. J. Geomat. Plan 2016, 3, 117–126. [Google Scholar] [CrossRef] [Green Version]
- Pacheco, A.; Horta, J.; Loureiro, C.; Ferreira, Ó. Retrieval of nearshore bathymetry from Landsat 8 images: A tool for coastal monitoring in shallow waters. Remote Sens. Environ. 2015, 159, 102–116. [Google Scholar] [CrossRef] [Green Version]
- Adler-Golden, S.M.; Acharya, P.K.; Berk, A.; Matthew, M.W.; Gorodetzky, D. Remote bathymetry of the littoral zone from AVIRIS, LASH, and QuickBird imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 337–347. [Google Scholar] [CrossRef]
- Yunus, A.P.; Dou, J.; Song, X.; Avtar, R. Improved bathymetric mapping of coastal and lake environments using Sentinel-2 and Landsat-8 images. Sensors 2019, 19, 2788. [Google Scholar] [CrossRef] [Green Version]
- Cahalane, C.; Magee, A.; Monteys, X.; Casal, G.; Hanafin, J.; Harris, P. A comparison of Landsat 8, RapidEye and Pleiades products for improving empirical predictions of satellite-derived bathymetry. Remote Sens. Environ. 2019, 233, 111414. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Lyzenga, D.R.; Malinas, N.P.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48 Pt 2, 547–556. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Smith, B.; Fricker, H.A.; Holschuh, N.; Gardner, A.S.; Adusumilli, S.; Brunt, K.M.; Csatho, B.; Harbeck, K.; Huth, A.; Neumann, T.; et al. Land ice height-retrieval algorithm for NASA’s ICESat-2 photon-counting laser altimeter. Remote Sens. Environ. 2019, 233, 111352. [Google Scholar] [CrossRef] [Green Version]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Forfinski-Sarkozi, N.A.; Parrish, C.E. Analysis of MABEL bathymetry in Keweenaw Bay and implications for ICESat-2 ATLAS. Remote Sens. 2016, 8, 772. [Google Scholar] [CrossRef] [Green Version]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS bathymetry and analysis of ATLAS’s bathymetric mapping performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef] [Green Version]
- Albright, A.; Glennie, C. Nearshore bathymetry from fusion of Sentinel-2 and ICESat-2 observations. IEEE Geosci. Remote Sens. Lett. 2020, 18, 900–904. [Google Scholar] [CrossRef]
- Chen, Y.; Le, Y.; Zhang, D.; Wang, Y.; Qiu, Z.; Wang, L. A photon-counting LiDAR bathymetric method based on adaptive variable ellipse filtering. Remote Sens. Environ. 2021, 256, 112326. [Google Scholar] [CrossRef]
- Giardino, C.; Brando, V.E.; Gege, P.; Pinnel, N.; Hochberg, E.; Knaeps, E.; Reusen, I.; Doerffer, R.; Bresciani, M.; Braga, F.; et al. Imaging spectrometry of inland and coastal waters: State of the art, achievements and perspectives. Surv. Geophys. 2019, 40, 401–429. [Google Scholar] [CrossRef] [Green Version]
- Casal, G.; Kutser, T.; Domínguez-Gómez, J.A.; Sánchez-Carnero, N.; Freire, J. Assessment of the hyperspectral sensor CASI-2 for macroalgal discrimination on the Ría de Vigo coast (NW Spain) using field spectroscopy and modelled spectral libraries. Cont. Shelf Res. 2013, 55, 129–140. [Google Scholar] [CrossRef]
- Kutser, T.; Dekker, A.G.; Skirving, W. Modeling spectral discrimination of Great Barrier Reef benthic communities by remote sensing instruments. Limnol. Oceanogr. 2003, 48 Pt 2, 497–510. [Google Scholar] [CrossRef] [Green Version]
- McIntyre, M.L.; Naar, D.F.; Carder, K.L.; Donahue, B.T.; Mallinson, D.J. Coastal bathymetry from hyperspectral remote sensing data: Comparisons with high resolution multibeam bathymetry. Mar. Geophys. Res. 2006, 27, 129–136. [Google Scholar] [CrossRef]
- Dekker, A.G.; Phinn, S.R.; Anstee, J.; Bissett, P.; Brando, V.E.; Casey, B.; Fearns, P.; Hedley, J.; Klonowski, W.; Lee, Z.P.; et al. Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments. Limnol. Oceanogr. Methods 2011, 9, 396–425. [Google Scholar] [CrossRef] [Green Version]
- Alevizos, E. A Combined Machine Learning and Residual Analysis Approach for Improved Retrieval of Shallow Bathymetry from Hyperspectral Imagery and Sparse Ground Truth Data. Remote Sens. 2020, 12, 3489. [Google Scholar] [CrossRef]
- Ma, S.; Tao, Z.; Yang, X.; Yu, Y.; Zhou, X.; Li, Z. Bathymetry Retrieval from Hyperspectral Remote Sensing Data in Optical-Shallow Water. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1205–1212. [Google Scholar] [CrossRef]
- Ungar, S.G.; Pearlman, J.S.; Mendenhall, J.A.; Reuter, D. Overview of the earth observing one (EO-1) mission. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1149–1159. [Google Scholar] [CrossRef]
- Kutser, T.; Miller, I.; Jupp, D.L.B. Mapping coral reef benthic substrates using hyperspectral space-borne images and spectral libraries. Estuar. Coast. Shelf Sci. 2006, 70, 449–460. [Google Scholar] [CrossRef]
- Davies, W.H.; North, P.R.J. Synergistic angular and spectral estimation of aerosol properties using CHRIS/PROBA-1 and simulated Sentinel-3 data. Atmos. Meas. Tech. 2015, 8, 1719–1731. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, L.; Zhang, H.; Han, X.; Zhang, L. Spatial–Temporal Wetland Landcover Changes of Poyang Lake Derived from Landsat and HJ-1A/B Data in the Dry Season from 1973–2019. Remote Sens. 2020, 12, 1595. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, J.; Zhang, L.; Zhang, G.; Li, X.; Wu, J. Geometric processing and accuracy verification of Zhuhai-1 hyperspectral satellites. Remote Sens. 2019, 11, 996. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.N.; Sun, D.X.; Hu, X.N.; Ye, X.; Li, Y.D.; Liu, S.F.; Cao, K.Q.; Chai, M.Y.; Zhou, W.Y.N.; Zhang, J.; et al. The advanced hyperspectral imager: Aboard China’s gaoFen-5 satellite. IEEE Geosci. Remote Sens. Mag. 2019, 7, 23–32. [Google Scholar] [CrossRef]
- Mzid, N.; Castaldi, F.; Tolomio, M.; Pascucci, S.; Casa, R.; Pignatti, S. Evaluation of Agricultural Bare Soil Properties Retrieval from Landsat 8, Sentinel-2 and PRISMA Satellite Data. Remote Sens. 2022, 14, 714. [Google Scholar] [CrossRef]
- Operation Manual of Preprocessing for Zhuhai-1 Hyperspectral Data V1.2; Zhuhai Orbita Aerospace Technology Co., Ltd.: Zhuhai, China, 2021.
- Collin, A.; Cottin, A.; Long, B.; Kuus, P.; Clarke, J.H.; Archambault, P.; Sohn, G.; Miller, J. Statistical classification methodology of SHOALS 3000 backscatter to mapping coastal benthic habitats. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 3178–3181. [Google Scholar]
- Peeri, S.; Gardner, J.V.; Ward, L.G.; Morrison, J.R. The seafloor: A key factor in lidar bottom detection. IEEE Trans. Geosci. Remote Sens. 2010, 49, 1150–1157. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, Z.; Le, Y.; Qiu, Z.; Chen, G.; Wang, L. Refraction correction and coordinate displacement compensation in nearshore bathymetry using ICESat-2 lidar data and remote-sensing images. Opt. Express 2021, 29, 2411–2430. [Google Scholar] [CrossRef] [PubMed]
- Anderson, G.P.; Felde, G.W.; Hoke, M.L.; Ratkowski, A.J.; Cooley, T.M.; Chetwynd, J.H., Jr.; Gardner, J.A.; Adler-Golden, S.M.; Matthew, M.W.; Berk, A.; et al. MODTRAN4-based atmospheric correction algorithm: FLAASH (fast line-of-sight atmospheric analysis of spectral hypercubes). In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 1–5 April 2002; Volume 4725. [Google Scholar]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Lsola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Mayer, B.; Kylling, A. Technical note: The libRadtran software package for radiative transfer calculations—Description and examples of use. Atmos. Chem. Phys. 2005, 5, 1855–1877. [Google Scholar] [CrossRef] [Green Version]
- Matsumoto, K.; Takanezawa, T.; Ooe, M. Ocean tide models developed by assimilating TOPEX/POSEIDON altimeter data into hydrodynamical model: A global model and a regional model around Japan. J. Oceanogr. 2000, 56, 567–581. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, Q.; Tu, R.; Liu, Z. Determination of ocean tide loading displacement by GPS PPP with priori information constraint of NAO99b global ocean tide model. Mar. Geod. 2018, 41, 159–176. [Google Scholar] [CrossRef]
- Collin, A.; Etienne, S.; Feunteun, E. VHR coastal bathymetry using WorldView-3: Colour versus learner. Remote Sens. Lett. 2017, 8, 1072–1081. [Google Scholar] [CrossRef]
- Xie, C.; Chen, P.; Pan, D.; Zhong, C.; Zhang, Z. Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery. Remote Sens. 2021, 13, 4303. [Google Scholar] [CrossRef]
- Hedley, J.D.; Roelfsema, C.; Brando, V.; Giardino, C.; Kutser, T.; Phinn, S.; Mumby, P.J.; Barrilero, O.; Laporte, J.; Koetz, B. Coral reef applications of Sentinel-2: Coverage, characteristics, bathymetry and benthic mapping with comparison to Landsat 8. Remote Sens. Environ. 2018, 216, 598–614. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. On the use of Sentinel-2 satellites and lidar surveys for the change detection of shallow bathymetry: The case study of North Carolina inlets. Coast. Eng. 2021, 169, 103936. [Google Scholar] [CrossRef]
- Diesing, M.; Green, S.L.; Stephens, D.; Lark, R.M.; Stewart, H.A.; Dove, D. Mapping seabed sediments: Comparison of manual, geostatistical, object-based image analysis and machine learning approaches. Cont. Shelf Res. 2014, 84, 107–119. [Google Scholar] [CrossRef] [Green Version]
- Vahtmäe, E.; Kutser, T. Airborne mapping of shallow water bathymetry in the optically complex waters of the Baltic Sea. J. Appl. Remote Sens. 2016, 10, 025012. [Google Scholar] [CrossRef]
- Monteys, X.; Harris, P.; Caloca, S.; Cahalane, C. Spatial prediction of coastal bathymetry based on multispectral satellite imagery and multibeam data. Remote Sens. 2015, 7, 13782–13806. [Google Scholar] [CrossRef] [Green Version]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and robust removal of sun glint for mapping shallow-water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Chen, B.; Yang, Y.; Xu, D.; Huang, E. A dual band algorithm for shallow water depth retrieval from high spatial resolution imagery with no ground truth. ISPRS J. Photogramm. Remote Sens. 2019, 151, 1–13. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ATL03 Dataset | Time (Local) | Track Used | Geodetic Coordinate Distribution |
|---|---|---|---|
| 20181022 | 15:38 | GT1R | 111.626°E, 16.532°N−111.624°E, 16.553°N |
| 20190222 | 21:51 | GT3L | 111.618°E, 16.552°N−111.616°E, 16.533°N |
| 20190421 | 06:58 * | GT1L | 111.597°E, 16.530°N−111.596°E, 16.537°N |
| 20190524 | 17:31 | GT2L | 111.614°E, 16.549°N−111.612°E, 16.529°N |
| 20191020 | 22:17 | GT1R | 111.598°E, 16.529°N−111.597°E, 16.537°N |
| 22:17 | GT2R (Validation) | 111.628°E, 16.530°N−111.625°E, 16.552°N | |
| 20220114 | 07:20 * | GT3L (Validation) | 111.608°E, 16.547°N−111.610°E, 16.526°N |
| Zhuhai-1 | Sentinel-2A | |||||||
|---|---|---|---|---|---|---|---|---|
| Band | Wavelength (nm) | Resolution (m) | Band | Wavelength (nm) | Resolution (m) | Band | Wavelength (nm) | Resolution (m) |
| 1 | 440–446 | 10 | 17 | 708–710 | 10 | 1 | 433–453 | 60 |
| 2 | 462–469 | 10 | 18 | 729–731 | 10 | 2 | 458–523 | 10 |
| 3 | 486–494 | 10 | 19 | 745–747 | 10 | 3 | 543–578 | 10 |
| 4 | 496–504 | 10 | 20 | 759–761 | 10 | 4 | 650–680 | 10 |
| 5 | 505–514 | 10 | 21 | 775–777 | 10 | 5 | 698–713 | 20 |
| 6 | 526–535 | 10 | 22 | 779–781 | 10 | 6 | 733–748 | 20 |
| 7 | 545–555 | 10 | 23 | 805–807 | 10 | 7 | 773–793 | 20 |
| 8 | 554–565 | 10 | 24 | 819–821 | 10 | 8 | 785–900 | 10 |
| 9 | 574–585 | 10 | 25 | 832–834 | 10 | 9 | 935–955 | 60 |
| 10 | 590–602 | 10 | 26 | 849–851 | 10 | 10 | 1360–1390 | 60 |
| 11 | 619–621 | 10 | 27 | 863–866 | 10 | 11 | 1565–1655 | 20 |
| 12 | 639–641 | 10 | 28 | 878–881 | 10 | 12 | 2100–2280 | 20 |
| 13 | 664–666 | 10 | 29 | 894–897 | 10 | |||
| 14 | 669–671 | 10 | 30 | 908–912 | 10 | |||
| 15 | 685–687 | 10 | 31 | 923–930 | 10 | |||
| 16 | 699–701 | 10 | 32 | 937–944 | 10 | |||
| Ground Track | Number of Detected Sea-Surface Photons | Number of Detected Bottom Photons | Maximum Water Depth after Correction (m) |
|---|---|---|---|
| 20181022GT1R | 2891 | 2027 | 13.61 |
| 20190222GT3L | 4922 | 3658 | 14.89 |
| 20190421GT1L | 1166 | 881 | 11.70 |
| 20190524GT2L | 4170 | 2514 | 12.01 |
| 20191020GT1R | 941 | 568 | 9.64 |
| 20191020GT2R | 880 | 795 | 23.58 |
| 20220114GT3L | 5336 | 3534 | 10.61 |
| Calibration Data | Tidal Height (m) | Images | Tidal Height (m) | Validation Data | Tidal Height (m) |
|---|---|---|---|---|---|
| 20181022GT1R | −0.3020 | Zhuhai-1 | 0.2515 | 20191020GT2R | 0.3392 |
| 20190222GT3L | 0.1755 | Sentinel-2 | −0.1634 | 20220114GT3L | −0.4327 |
| 20190421GT1L | 0.0372 | ALB data | 0.8168 | ||
| 20190524GT2L | 0.1135 | ||||
| 20191020GT1R | 0.3392 |
| Satellite | Bands | Models | Abbreviation of Models | R2 | RMSE (m) | Equation |
|---|---|---|---|---|---|---|
| Zhuhai-1 | 2 (B) 9 (G) | Band ratio | ZBR2, 9 | 0.90 | 0.94 | |
| 12 (R) 29 (NI) | Band ratio | ZBR12, 29 | 0.93 | 0.81 | ||
| 3 (B) 9 (G) | Linear band | ZLB3, 9 | 0.92 | 0.86 | ||
| 10 (R) 29 (NI) | Linear band | ZLB10, 29 | 0.88 | 1.07 | ||
| 3 (B) 9 (G) 12 (R) | Linear band | ZLB3, 9, 12 | 0.92 | 0.85 | ||
| Sentinel-2 | 2 (B) 3 (G) | Band ratio | SBR2, 3 | 0.91 | 0.89 | |
| 4 (R) 8 (NI) | Band ratio | SBR4, 8 | 0.73 | 1.53 | ||
| 2 (B) 3 (G) | Linear band | SLB2, 3 | 0.96 | 0.57 | ||
| 4 (R) 8 (NI) | Linear band | SLB4, 8 | 0.81 | 1.31 | ||
| 2 (B) 3 (G) 4 (R) | Linear band | SLB2, 3, 4 | 0.96 | 0.56 |
| Ground Tracks for Validation | SDB Models | Parameters (m) | Intervals of Water Depth (m) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| [0, 2] | [2, 4] | [4, 6] | [6, 8] | [8, 10] | [10, 12] | [12, 14] | [>14] | |||
| 20191020GT2R | ZBR2, 9 | RMSE | 0.81 | 1.57 | 1.22 | 0.95 | 1.18 | 1.24 | 1.02 | 4.69 |
| bias | −0.21 | −0.74 | 0.61 | 0.50 | 0.40 | 1.06 | −0.53 | −4.33 | ||
| ZBR12, 29 | RMSE | 0.88 | 1.89 | 1.56 | 1.04 | 1.70 | 1.40 | 2.03 | 6.32 | |
| bias | −0.59 | 0.21 | 1.29 | −0.27 | 1.01 | 0.88 | −1.80 | −5.69 | ||
| ZLB3, 9 | RMSE | 0.85 | 1.56 | 1.58 | 0.92 | 0.83 | 0.66 | 1.74 | 6.6 | |
| bias | −0.33 | 0.44 | 1.52 | 0.82 | 0.67 | 0.45 | −1.46 | −6.32 | ||
| ZLB10, 29 | RMSE | 0.75 | 2.53 | 2.86 | 1.76 | 1.38 | 0.69 | 1.65 | 6.51 | |
| bias | −0.18 | 1.43 | 2.84 | 1.69 | 1.35 | 0.48 | −1.47 | −6.15 | ||
| ZLB3, 9, 12 | RMSE | 0.84 | 1.72 | 1.87 | 1.15 | 1.47 | 1.22 | 1.32 | 6.28 | |
| bias | −0.32 | 0.54 | 1.78 | 1.03 | 1.20 | 1.10 | −0.94 | −5.93 | ||
| SBR2, 3 | RMSE | 0.68 | 0.83 | 0.97 | 0.71 | 0.54 | 1.17 | 2.81 | 3.6 | |
| bias | 0.09 | −0.62 | −0.75 | −0.35 | 0.16 | 0.54 | −1.41 | −3.11 | ||
| SBR4, 8 | RMSE | 1.61 | 2.27 | 3.42 | 3.32 | 2.41 | 1.32 | 1.73 | 6.35 | |
| bias | 0.84 | 2.09 | 3.23 | 3.25 | 2.20 | 0.86 | −1.04 | −6.10 | ||
| SLB2, 3 | RMSE | 0.91 | 0.88 | 0.71 | 0.81 | 0.87 | 0.96 | 2.3 | 4.08 | |
| bias | −0.07 | −0.01 | 0.21 | 0.55 | 0.79 | 0.54 | −1.53 | −4.79 | ||
| SLB4, 8 | RMSE | 1.03 | 2.37 | 3.15 | 2.9 | 1.26 | 1.08 | 2.95 | 7.45 | |
| bias | −0.73 | 0.89 | 3.11 | 2.83 | 1.10 | −0.81 | −2.80 | −7.37 | ||
| SLB2, 3, 4 | RMSE | 0.93 | 0.79 | 0.71 | 0.78 | 0.94 | 1.08 | 2.24 | 3.65 | |
| bias | 0.01 | −0.03 | 0.07 | 0.49 | 0.86 | 0.72 | −1.35 | −3.32 | ||
| 20220114GT3L | ZBR2, 9 | RMSE | 0.71 | 0.86 | 1.05 | 1.16 | 1.21 | 1.05 | - | - |
| bias | 0.14 | 0.32 | 0.41 | 0.20 | 0.67 | 0.04 | - | - | ||
| ZBR12, 29 | RMSE | 0.80 | 1.06 | 1.63 | 1.50 | 0.90 | 1.44 | - | - | |
| bias | 0.09 | 0.42 | 0.75 | −0.13 | −0.54 | −1.01 | - | - | ||
| ZLB3, 9 | RMSE | 0.64 | 0.82 | 1.07 | 0.89 | 1.16 | 1.73 | - | - | |
| bias | 0.23 | −0.13 | 0.68 | 0.30 | −0.92 | −1.59 | - | - | ||
| ZLB10, 29 | RMSE | 1.04 | 1.22 | 1.47 | 1.29 | 1.56 | 2.13 | - | - | |
| bias | 0.05 | 1.09 | 1.60 | 1.14 | −0.37 | −1.33 | - | - | ||
| ZLB3, 9, 12 | RMSE | 0.80 | 0.85 | 1.31 | 0.95 | 0.60 | 1.07 | - | - | |
| bias | 0.20 | 0.32 | 0.93 | 0.46 | 0.08 | −0.48 | - | - | ||
| SBR2, 3 | RMSE | 0.91 | 0.69 | 0.87 | 1.13 | 1.18 | 1.22 | - | - | |
| bias | 0.66 | −0.19 | 0.07 | 0.38 | 0.81 | 0.54 | - | - | ||
| SBR4, 8 | RMSE | 1.62 | 1.56 | 2.15 | 1.82 | 1.02 | 1.69 | - | - | |
| bias | 0.95 | 1.16 | 1.65 | 1.48 | 0.10 | −1.36 | - | - | ||
| SLB2, 3 | RMSE | 0.72 | 0.88 | 1.22 | 1.26 | 0.99 | 0.76 | - | - | |
| bias | 0.43 | 0.31 | 0.81 | 0.84 | 0.66 | 0.09 | - | - | ||
| SLB4, 8 | RMSE | 0.89 | 1.9 | 2.4 | 2.53 | 1.29 | 0.74 | - | - | |
| bias | −0.40 | 1.12 | 1.99 | 2.18 | 0.82 | −0.44 | - | - | ||
| SLB2, 3, 4 | RMSE | 0.79 | 0.84 | 1.18 | 1.25 | 1.09 | 0.84 | - | - | |
| bias | 0.51 | 0.25 | 0.74 | 0.81 | 0.76 | 0.23 | - | - | ||
| SDB Models | Parameters (m) | Intervals of Water Depth (m) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| [0, 2] | [2, 4] | [4, 6] | [6, 8] | [8, 10] | [10, 12] | [12, 14] | [>14] | ||
| ZBR2, 9 | RMSE | 2.34 | 2.70 | 2.51 | 2.65 | 2.50 | 1.98 | 1.50 | 1.14 |
| bias | 2.25 | 2.62 | 2.43 | 2.61 | 2.48 | 1.71 | 0.64 | −0.87 | |
| ZBR12, 29 | RMSE | 2.56 | 2.41 | 2.08 | 3.00 | 2.64 | 1.79 | 2.25 | 3.77 |
| bias | 2.49 | 2.32 | 1.84 | 2.03 | 1.65 | 0.13 | −1.62 | −3.51 | |
| ZLB3, 9 | RMSE | 2.54 | 2.89 | 2.49 | 1.96 | 1.43 | 0.95 | 1.68 | 3.68 |
| bias | 2.39 | 2.78 | 2.28 | 1.78 | 1.21 | 0.08 | −1.49 | −3.64 | |
| ZLB10, 29 | RMSE | 3.29 | 3.90 | 3.46 | 2.51 | 1.72 | 0.99 | 2.07 | 4.79 |
| bias | 3.08 | 3.79 | 3.32 | 2.35 | 1.47 | −0.02 | −1.96 | −4.72 | |
| ZLB3, 9, 12 | RMSE | 2.54 | 3.01 | 2.78 | 2.60 | 2.08 | 1.27 | 1.49 | 3.50 |
| bias | 2.39 | 2.90 | 2.57 | 2.34 | 1.81 | 0.63 | −1.03 | −3.34 | |
| SBR2, 3 | RMSE | 1.39 | 1.43 | 1.15 | 0.81 | 0.95 | 1.46 | 1.70 | 2.22 |
| bias | 1.29 | 1.33 | 0.85 | 0.49 | 0.38 | 0.04 | −1.08 | −2.14 | |
| SBR4, 8 | RMSE | 4.49 | 5.46 | 5.16 | 3.54 | 2.19 | 1.08 | 1.83 | 4.27 |
| bias | 4.10 | 5.24 | 4.86 | 3.25 | 1.72 | −0.19 | −1.72 | −4.10 | |
| SLB2, 3 | RMSE | 1.74 | 1.90 | 1.48 | 0.91 | 0.61 | 1.01 | 2.00 | 3.27 |
| bias | 1.63 | 1.82 | 1.29 | 0.71 | 0.24 | −0.59 | −1.95 | −3.35 | |
| SLB4, 8 | RMSE | 2.37 | 3.88 | 4.05 | 2.86 | 1.90 | 1.22 | 2.74 | 5.35 |
| bias | 2.03 | 3.68 | 3.83 | 2.63 | 1.56 | −0.29 | −2.72 | −5.34 | |
| SLB2, 3, 4 | RMSE | 1.72 | 1.79 | 1.38 | 0.86 | 0.62 | 1.01 | 1.90 | 3.07 |
| bias | 1.61 | 1.71 | 1.17 | 0.66 | 0.24 | −0.51 | −1.82 | −3.14 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, Y.; Hu, M.; Chen, Y.; Yan, Q.; Zhang, D.; Li, S.; Zhang, X.; Wang, L. Investigating the Shallow-Water Bathymetric Capability of Zhuhai-1 Spaceborne Hyperspectral Images Based on ICESat-2 Data and Empirical Approaches: A Case Study in the South China Sea. Remote Sens. 2022, 14, 3406. https://doi.org/10.3390/rs14143406
Le Y, Hu M, Chen Y, Yan Q, Zhang D, Li S, Zhang X, Wang L. Investigating the Shallow-Water Bathymetric Capability of Zhuhai-1 Spaceborne Hyperspectral Images Based on ICESat-2 Data and Empirical Approaches: A Case Study in the South China Sea. Remote Sensing. 2022; 14(14):3406. https://doi.org/10.3390/rs14143406
Chicago/Turabian StyleLe, Yuan, Mengzhi Hu, Yifu Chen, Qian Yan, Dongfang Zhang, Shuai Li, Xiaohan Zhang, and Lizhe Wang. 2022. "Investigating the Shallow-Water Bathymetric Capability of Zhuhai-1 Spaceborne Hyperspectral Images Based on ICESat-2 Data and Empirical Approaches: A Case Study in the South China Sea" Remote Sensing 14, no. 14: 3406. https://doi.org/10.3390/rs14143406
APA StyleLe, Y., Hu, M., Chen, Y., Yan, Q., Zhang, D., Li, S., Zhang, X., & Wang, L. (2022). Investigating the Shallow-Water Bathymetric Capability of Zhuhai-1 Spaceborne Hyperspectral Images Based on ICESat-2 Data and Empirical Approaches: A Case Study in the South China Sea. Remote Sensing, 14(14), 3406. https://doi.org/10.3390/rs14143406