1. Introduction
Pasture is one of the most important land uses globally, occupying approximately 25% of total ice-free land and 67% of agricultural land [
1]. Pastures host about 1.43 billion cattle and 1.87 billion sheep and goats [
2], supporting the livelihoods of millions of people around the world [
3]; at the same time, they are major contributors of greenhouse gas emissions to the atmosphere [
4,
5,
6]. When trees and shrubs are present in pasture areas, these ecosystems are classified as silvopastoral systems (SPS) [
7], which are known for having a positive effect on the farm economy [
8], biodiversity [
9], and carbon stocks [
10,
11,
12]. Additionally, SPS present an opportunity to contribute to climate-change-mitigation goals at national level, through carbon sequestration. For example, 59 developing countries have included agroforestry systems as a strategy for climate change mitigation in their Nationally Determined Contributions (NDCs) to climate-change mitigation [
13].
However, information about the extent and characteristics of SPS is limited to plot measurements in local studies; there is a lack of information covering larger areas, which makes it difficult to include the contribution of SPS to climate-change mitigation in national reports [
13]. Tree species, density, height, and diameter at breast height are the most common measurements used to describe SPS and estimate aboveground carbon stocks and sequestration potential [
14] using non-destructive methods [
15]. The measurements traditionally follow methodologies for forest assessments, and it is common to find a variety of plot sizes and shapes [
16]. Regardless of the plot characteristics, SPS studies often cover small portions of farms or few farms, probably due to the high costs of surveying, as in other ecological surveys [
17], which makes it difficult to gather enough evidence to understand SPS composition at larger spatial extents and over successive time periods. Since SPSs are actively managed by farmers, on-farm practices have a direct influence on trees’ density and spatial arrangement over variable periods of time; hence, an accurate assessment of SPS characteristics is necessary to improve the understanding of these systems’ contribution to climate-change mitigation.
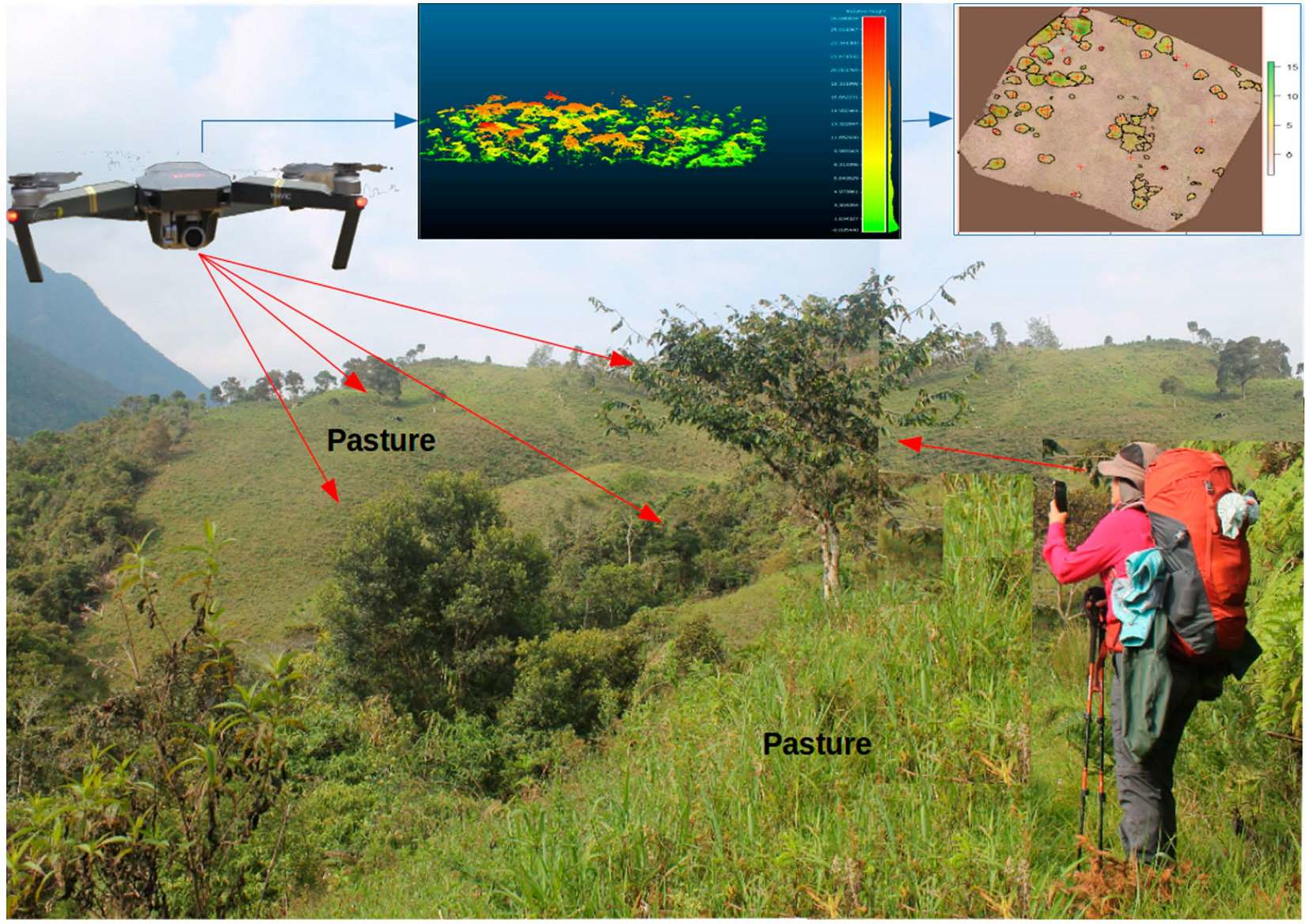
The performance of surveys by small unoccupied aerial systems (UASs) can be an alternative approach to overcome constraints relating to spatial and temporal scales, especially in developing countries, where research funds can be a limiting factor [
18]. The use of UASs for aerial surveys in ecological studies has been demonstrated to: (a) be a good option in study areas with difficult access [
19], (b) reduce the time and labor used in traditional surveys [
20], (c) cover larger areas [
21], and (d) allow high temporal resolution [
22]. Information generated from UAS surveys depends on the type of sensors used (RGB, NIR (near infrared), thermal, or LiDAR). Most commercial UASs have an integrated RGB camera as a default option, which makes them feasible, inexpensive, and practical options for aerial surveys in developing countries. Although LiDAR and NIR sensors provide a broader range of information with which to assess forest canopy characteristics, the development of open-source photogrammetry software and algorithms in recent years has made it possible to extract information from RGB sensors to assess forest characteristics (such as tree height and crown diameter), with results similar to those obtained from LiDAR surveys [
23], with considerably lower costs. Several studies using UASs to assess forest characteristics have been published [
24,
25,
26,
27,
28], but few have focused on the potential for studying SPS [
29,
30]. The use of photogrammetry to assess tree characteristics on SPS follows the same principles as in forested areas. The main difference between forest and pasture-dominated areas is the extent of the canopy gaps, which, by definition, are considerably larger in pasture areas, thus improving ground-truth detection and digital-terrain-model (DTM) creation using structure-from-motion (SfM) workflows [
27]. The accuracy of tree-characteristics estimates depends on terrain conditions, and remains a challenge in areas with steep slopes [
31]; however, even in even terrain, the accuracy depends on the tree stands’ density and the methods used to calculate their characteristics [
30].
When studying trees in agricultural landscapes, either as agroforestry or silvopastoral systems, the detection of individual trees becomes a key part of the analysis as, with the usual low tree density, it is important to recognize every individual. Methods to detect trees can rely on local maxima methods [
24,
25], object-based classification [
32], or, as shown more recently, using neural networks with RGB imagery [
33]. Nevertheless, it can still be considered a challenge, especially in developing regions, where some methods, such as object-based classification, are mainly performed by paid software, while local-maxima methods have mostly been applied using LiDAR-derived data. Nonetheless, UAS surveys represent an opportunity to study SPS and address other issues that have not been studied enough, such as spatial arrangements at larger spatial extents. While more sophisticated hardware may provide more accurate results, we used inexpensive and readily available hardware to test whether the method could be used in developing countries, where resources are more limited. In this study, we propose an approach that combines field-level techniques (plot measurements) with remote-sensing information (UAS photogrammetry) to study SPS characteristics. The overall aim of the study was to assess the suitability of UAS surveys to estimate aboveground biomass on SPS. To achieve this, we: (1) compared the best parameter combination for point-cloud processing and classification, by evaluating the canopy-height-model differences against field measurements; (2) assessed the performance of individual tree detection derived from canopy-height models vs. visual identification in ortho-mosaic images; and (3) assessed the tree spatial arrangements and distribution of SPS.
3. Results
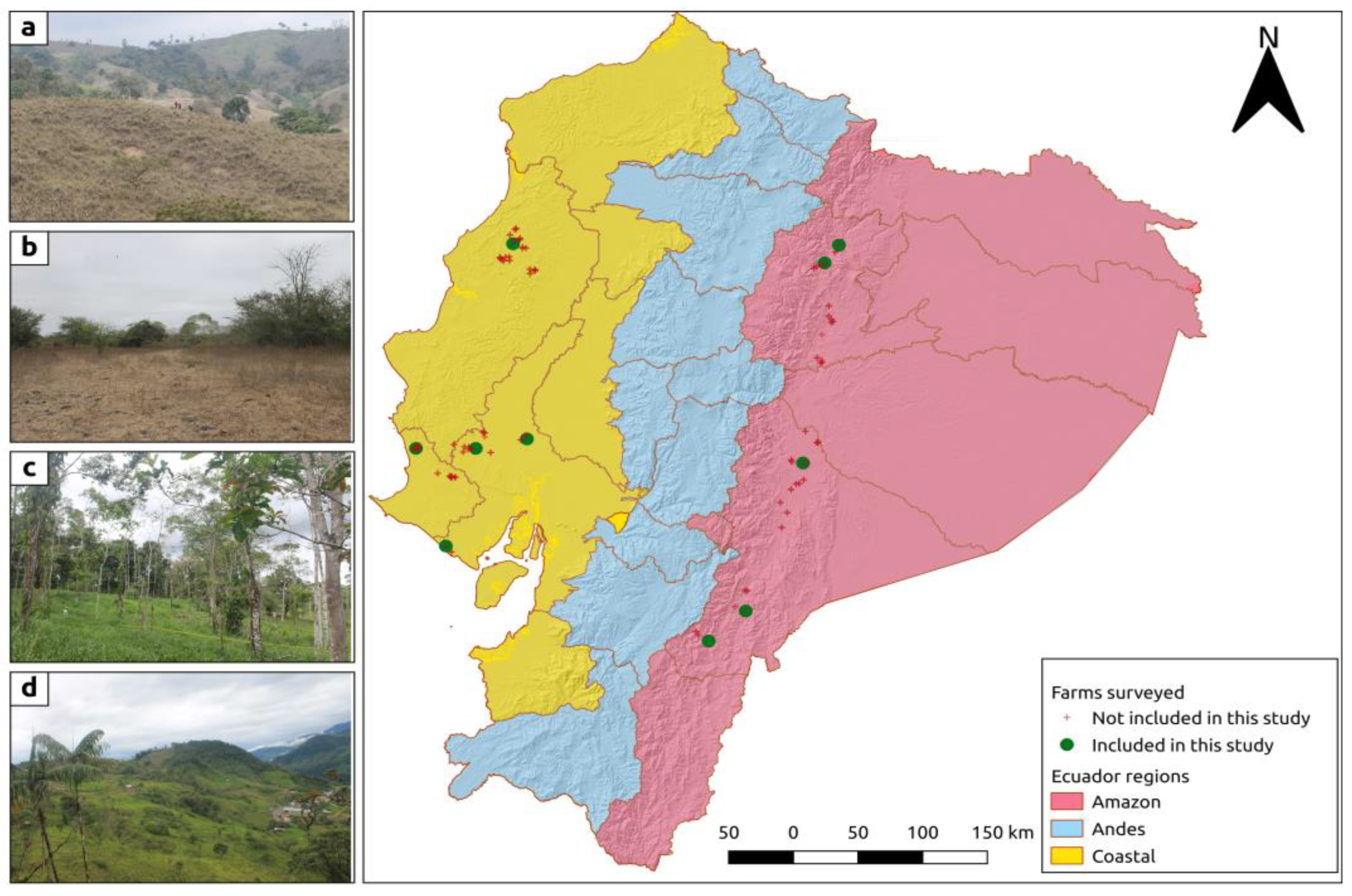
3.1. Site Characteristics and Tree Inventory Results
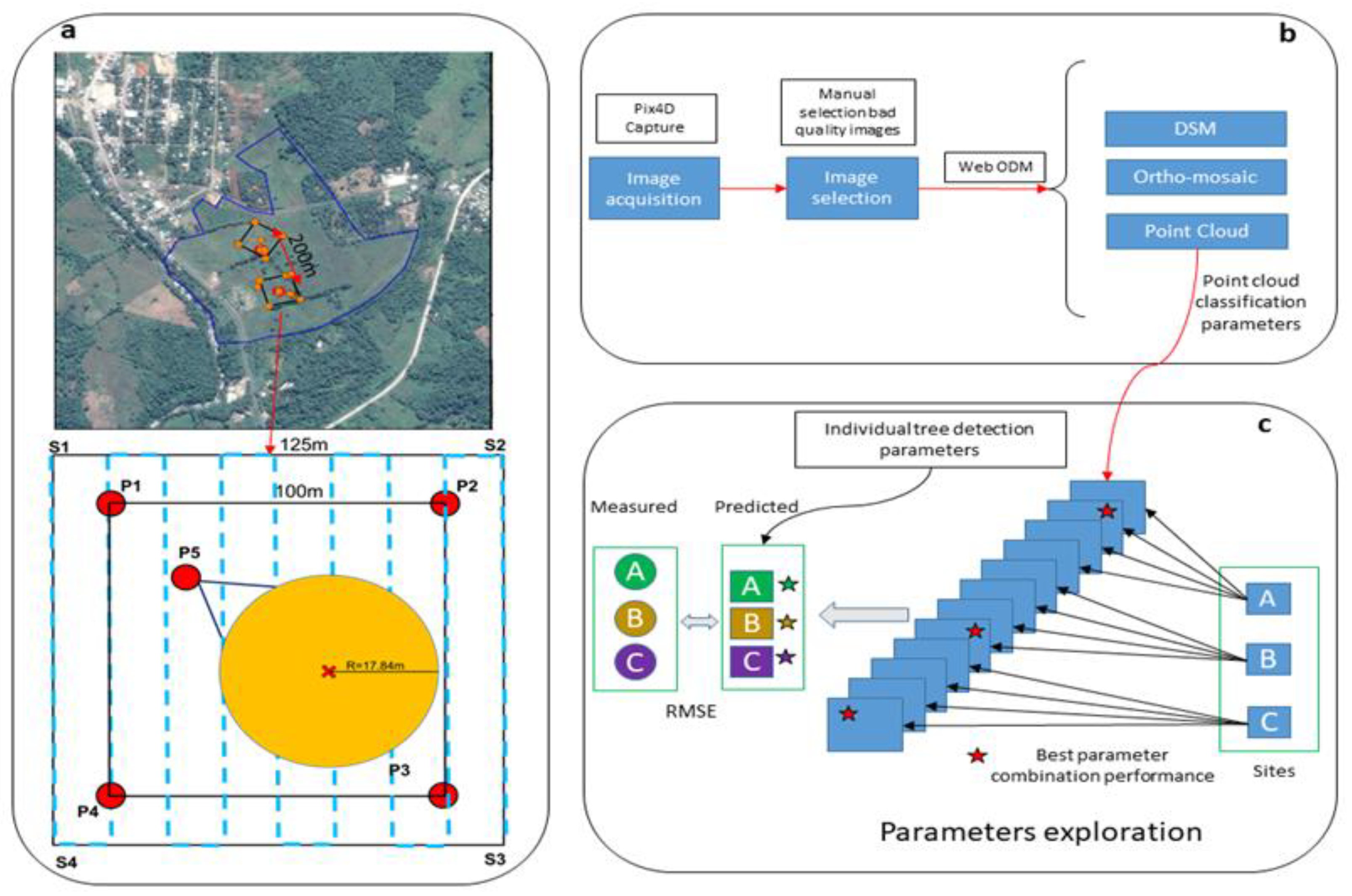
The circular plot installation (0.1 ha) and tree measurements on the pasture areas each took 2–5 h, depending on the number of trees, using teams of four people. For the UAS survey, a team of two people and 45–60 min were needed for every 1.56-hectare plot. Since the surveys were performed on areas that farmers use for cattle grazing, open areas covered with grass species were dominant. The terrain slopes varied between the plots, but, in general, irregular terrains with slopes ≥ 20% were found in the Amazon region (plots A1, A2, A3, and A5), whilst in the coastal region, the slopes ranged between 4 and 16% in four plots; only in plot C4 was this value above 20% (
Appendix B). In total, 58 trees were surveyed, with a minimum of 1 and a maximum of 17 trees per plot. The tree heights ranged from 2.4 to 21 m, and the crown diameters ranged from 2.5 to 15.6 m.
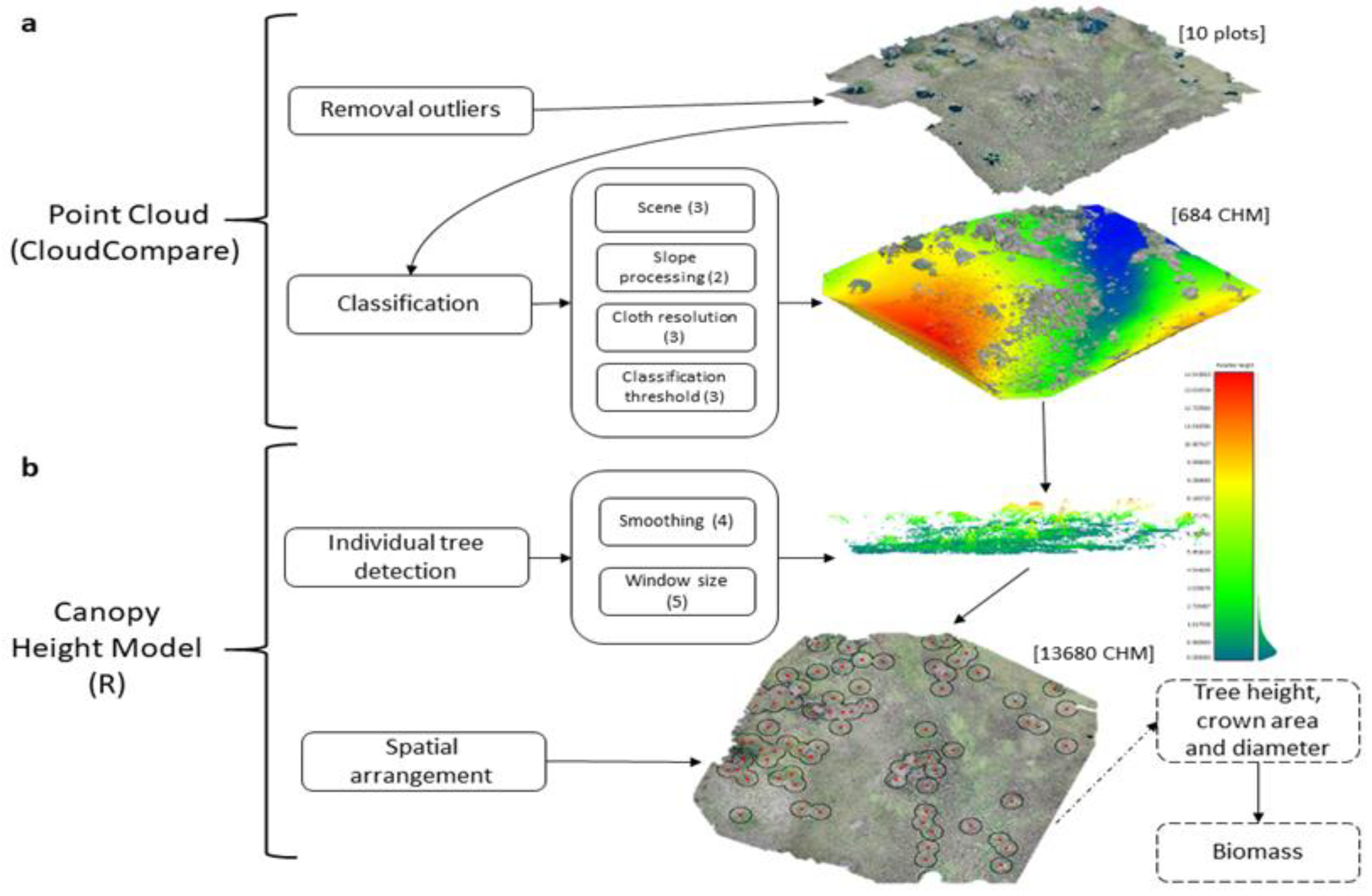
3.2. Cloud-Point Creation
The differences in the point-cloud building settings had an impact on the processing time, point-cloud size, and percentage of discarded points, with par1 settings using more processing time, displaying smaller point-cloud sizes and removing fewer points than the def characteristics (SI2). The processing time for all the plots was 12:02:22 h under default characteristics, 16:49:56 h for par1 settings, and 34:16:45 h for high-resolution settings. For the point-cloud size, the par1 point cloud had, on average, 4,281,057 fewer points than the default characteristics, whilst the high resolution had 32,430,874 more points. The percentage of points identified as outliers and removed varied from 0.32, 0.059, and 0.20% for the default, par1, and high-resolution settings, respectively. Due to the processing time needed for the high resolution, the next steps considered only the def and par1 outputs. From the def and par1 settings, 13,680 outputs with individual tree detection were generated. Of these, only 5078 detected an exact number of trees inside the circular-plot validation, making them suitable for assessing differences among measured values. Due to the differences in site characteristics, the point-cloud classification and individual tree-detection parameter combination were expected to vary between plots, but also to show similarities in plots with similar characteristics. The similarities between the plots are discussed in the Discussion section.
3.3. Canopy-Height-Model Validation
For the calculation of the biomass from the field measurements, in which the correct measurement of the tree parameters resulted in more robust estimations, the tree parameters obtained from the UAS surveys needed to be validated against field measurements to prove their usefulness on biomass estimations. The tree heights and crown diameters were compared against the field measurements to identify possible sources of error in the final biomass estimates.
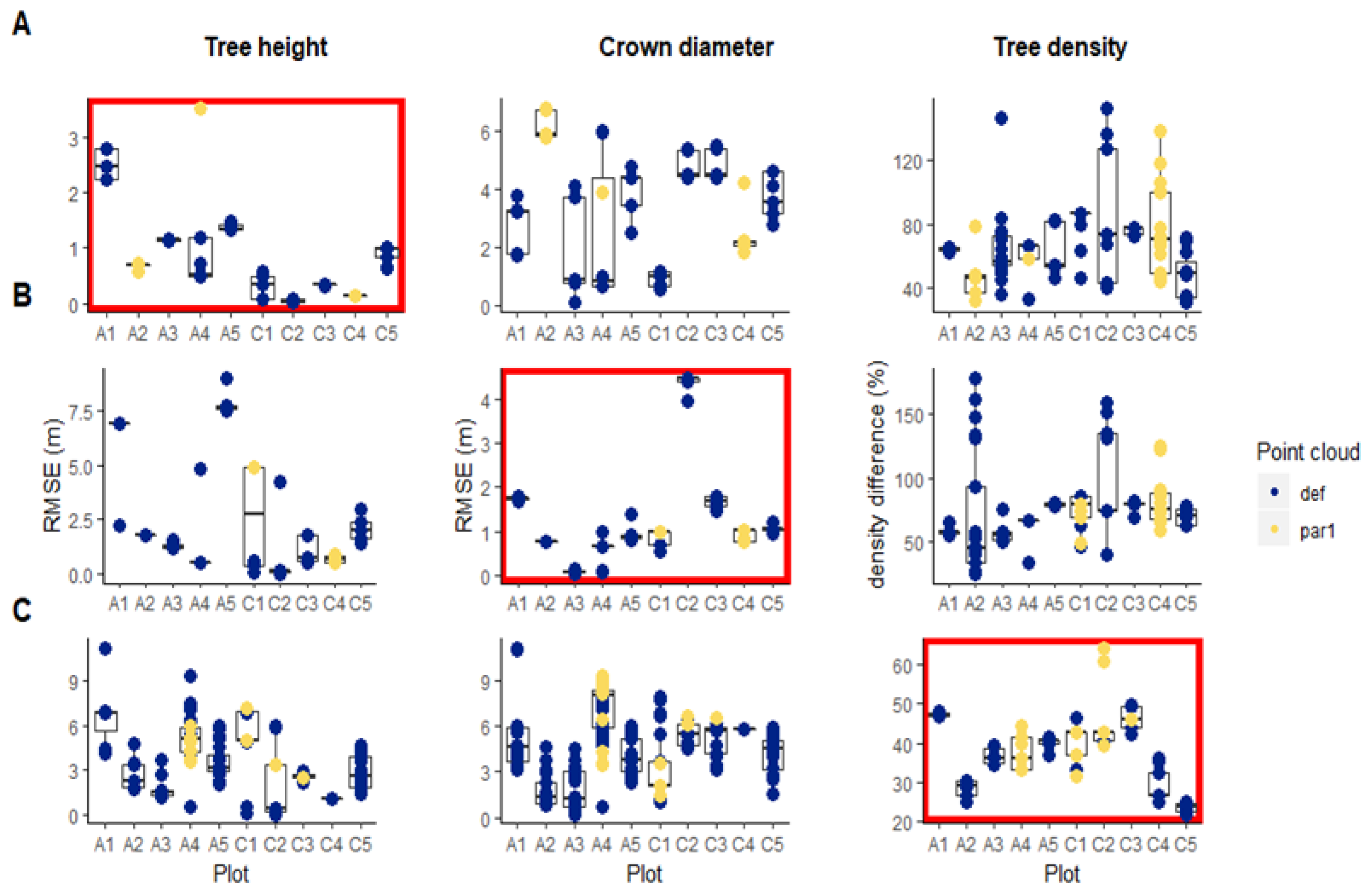
3.3.1. Tree-Height Differences
The RMSEs of the best models ranged from 0.49 to 3.53 m and 0.01 to 1.01 m in the Amazon and the Coastal regions, respectively (
Figure 5a). The point-cloud-building, classification, and individual tree-detection parameters did not significantly influence the estimates of tree height when analyzed separately. The relative frequencies for each parameter level for the tree height sand crown diameters are presented in
Table 2. The point-cloud building specifications (ODM) resulted in high agreement (>0.75) in all the plots, with 80% of the plots showing lower RMSE under the def settings in the Web Open Drone Map software, whilst in the plots A2 and C4, the best results were found using the par1 specifications. With the point-cloud classification parameters, only the cloth resolution (CLR) and classification threshold (CTR) presented a high agreement in more than 50% of the plots, with a CLR size of 1 for 70% of the plots and CTR of 0.2 for 50% of the plots. Meanwhile, for the scene and slope processing parameters, medium agreement within plots was found in 50% and 60% of the plots, respectively. The flat scenes performed better for the plots in the Coastal region, whereas the steep slope and relief scenes were predominant in the plots located in the Amazon region. In 60% of the farms, the tree heights were estimated better without slope processing, whilst a cloth resolution size of 1 and a classification threshold of 0.2 were the most common settings for at least 50% of the plots. The parameters for individual tree detection reached strong agreement in 40% of the farms for window-filter size, and medium agreement in 50% of the farms for smoothing-window size. Only window-filter sizes 1 and 5 presented strong agreement, and the smoothing-window process presented strong agreement at sizes 0, 3, and 5.
3.3.2. Crown Diameter Differences
The RMSEs for the best models ranged from 0.04 to 1.77 m and from 0.53 to 4.47 m for the Amazon and Coastal regions, respectively (
Figure 5B). Similarly to the height estimation, the ODM parameter presented strong agreement in 90% of the plots, among which default characteristics for point-cloud building were present in 80% (
Table 3). For the point-cloud-classification parameters, scene resulted in high agreement in 40% of the farms, whilst the other 60% reached only medium agreement. The steep slope was the most common scene for the plots in the Amazon region and flat was the most common for the Coastal region. Avoiding slope processing presented the best results in 70% of the farms, with strong agreement in 50% of them. Cloth-resolution sizes of 0.2 and 1 were present in 40 and 50% of the plots, respectively, and showed strong agreement in only three plots. The classification threshold reached strong agreement in 50% of the plots, with a size of 1 present in 40% of the plots, followed by 0.5 in 30% of plots, and 0.2 in only two plots. The window-filter size resulted in strong agreement in only one plot and medium agreement in one, but with a size of 5. The smoothing process resulted in agreement in 50% of the plots, with size 5 present in 30% of the plots, and size 3 in 20%.
3.4. Tree-Density Assessment
The tree-density differences ranged from 25 to 48% and from 21.85 to 64.28% in the Amazon and Coastal regions, respectively (
Figure 5C). The point-cloud-building specifications showed strong agreement in 70% of the plots for the default characteristics, and medium agreement was found for three plots, with one def and two par1 characteristics (
Table 4). For the cloud-classification parameters, scene resulted in strong agreement in 40% of the plots, with two flat and two s.slop; meanwhile, 50% of the farms resulted in medium agreement, with three plots with a relief scene, and one with a flat and steep slope. For the slope processing, medium agreement was found in 80% of the plots, with 50% of the plots resulting in better tree-density estimates with slope processing and the other 50% without it. Cloth resolution resulted in strong agreement in 50% of the plots, whilst the other 30% showed medium agreement, and 20% showed low agreement. The classification threshold resulted in medium agreement for 50% of the plots, and strong agreement was found in only one plot. The most common cloth-resolution size was 0.5 (3 plots), followed by 0.2, and 1, with one plot each. Strong agreement was absent in the window-size-filter parameter, while medium agreement was found only in four plots, with size 2 present in three of them. No-smoothing showed medium and strong agreement in two plots.
Using the best models for tree height, crown diameter, and tree density, the average relative frequency was calculated for an ideal combination of parameters that could help to improve the estimations. The relative-frequency values were averaged for every parameter level. The apparent optimum model combination showed a strong agreement for default point-cloud building on 70% of the plots, whilst in the other 30%, there was medium agreement, with one plot with par1 settings. The point-cloud classification parameters gave medium agreement for scene (70% of plots), slope processing (90% of plots), and cloth resolution (60% of the plots). For the tree-detection parameters, the window-size filter resulted in low agreement for 90% of the plots and medium agreement for one plot. The smoothing-processing window resulted in medium agreement for 50% of the plots and low agreement for the other 50%.
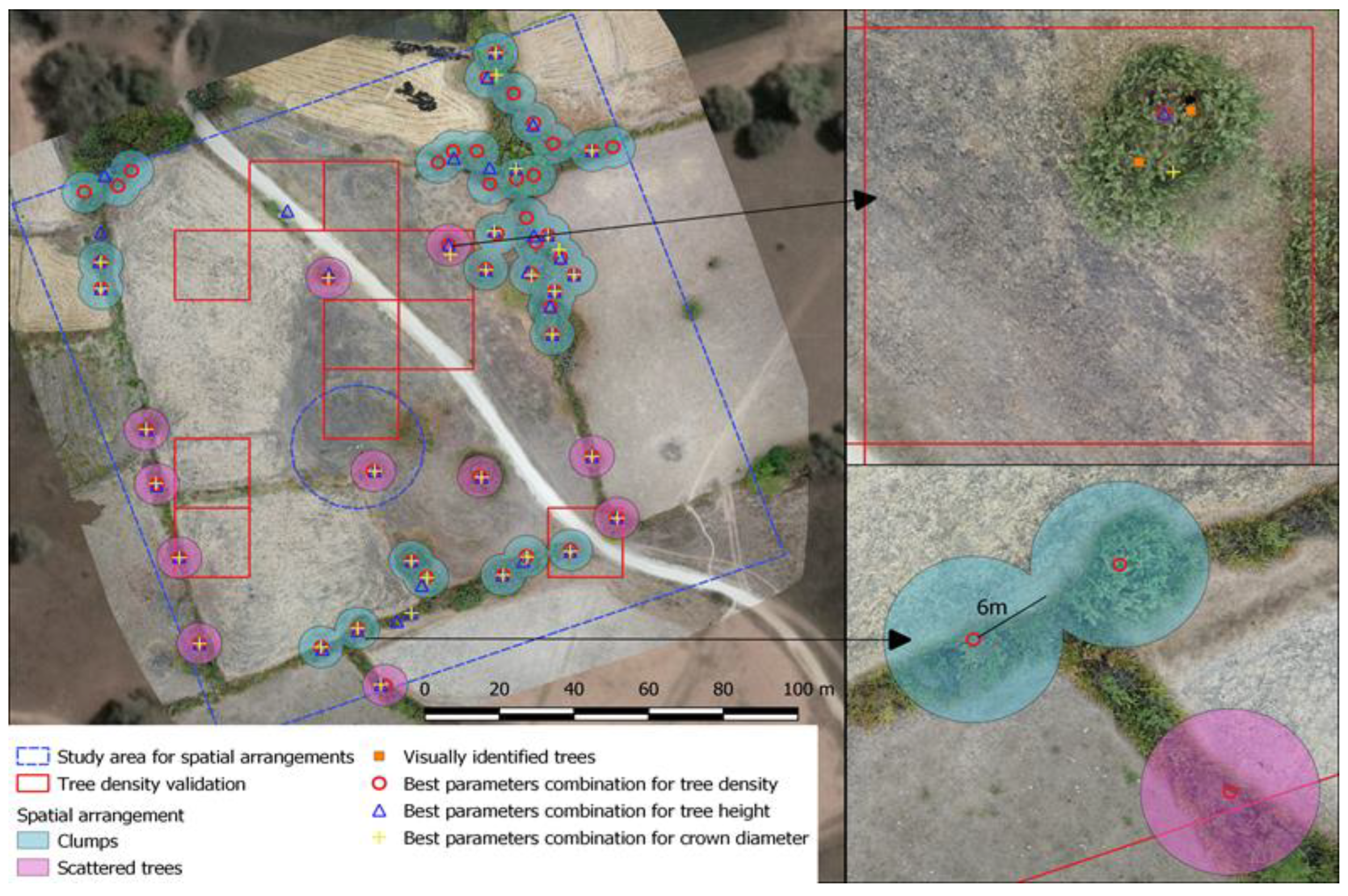
3.5. Spatial Arrangements
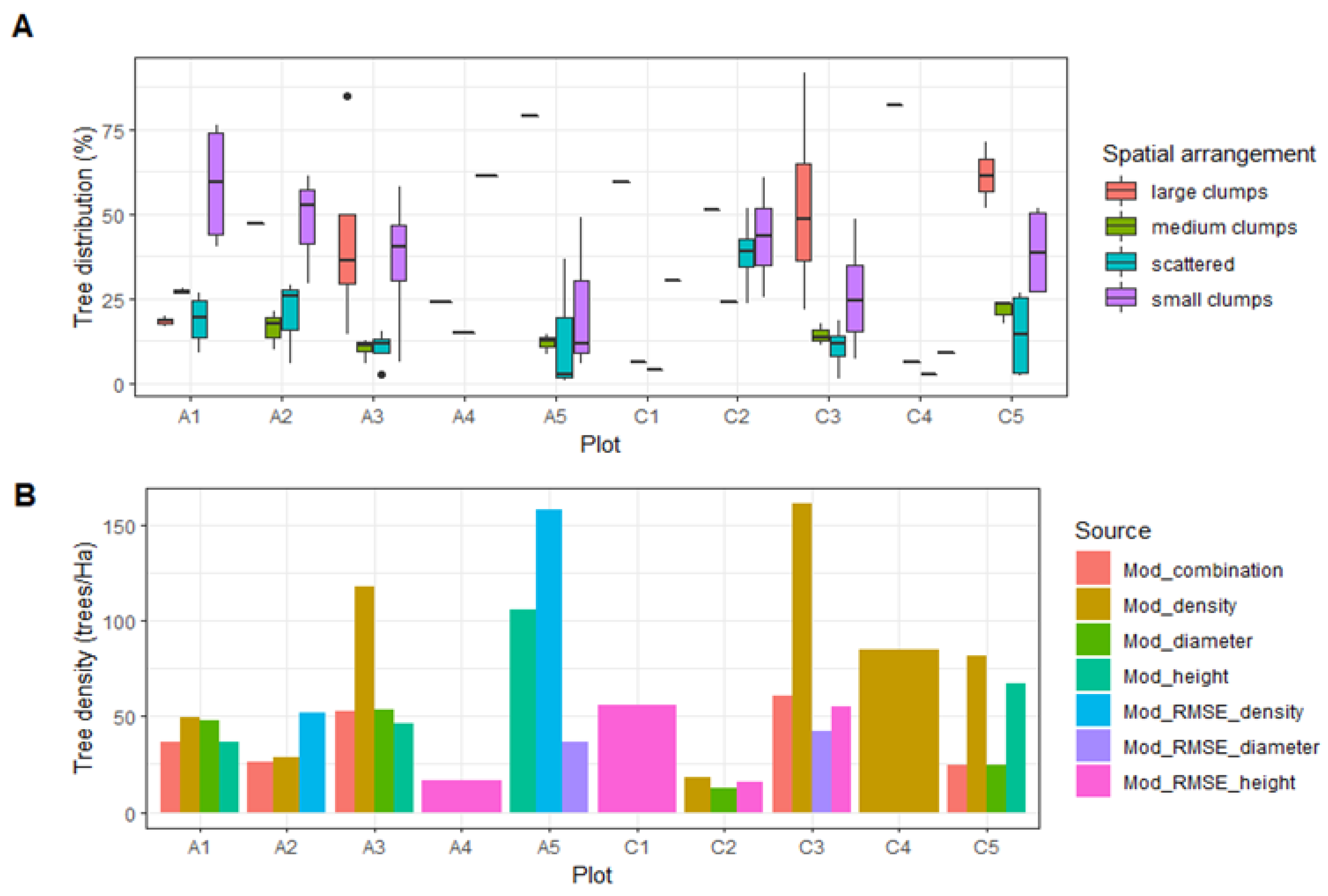
The methodology proved to be useful for identifying the spatial arrangements of trees in livestock landscapes. Although the number of individual trees detected was influenced by a combination of parameters (
Figure 6B), the average tree distribution for was used to determine the spatial arrangement. On the plots located in the Amazon region, with the exception of A5, the majority of the trees were grouped in small clumps, whilst in the plots located on the Coastal region, the majority of the trees were grouped in large clumps, as seen in
Figure 6A. On plot A5, most of the trees were grouped in large clumps. The number of trees identified in the square plots varied depending on the parameter-combination selection criteria; in plots A1, A3, C2, C3, and C5, the parameter-combination selection that focused on tree-density validation resulted in a higher number of trees, whilst in plots A2 and A5, the parameter combination that showed the lowest RMSE for tree density identified a higher number of trees in comparison with the other parameter-combination criteria. For plots A4, C1, and C4, only one parameter-combination criterion identified the exact number of trees inside the circular plots.
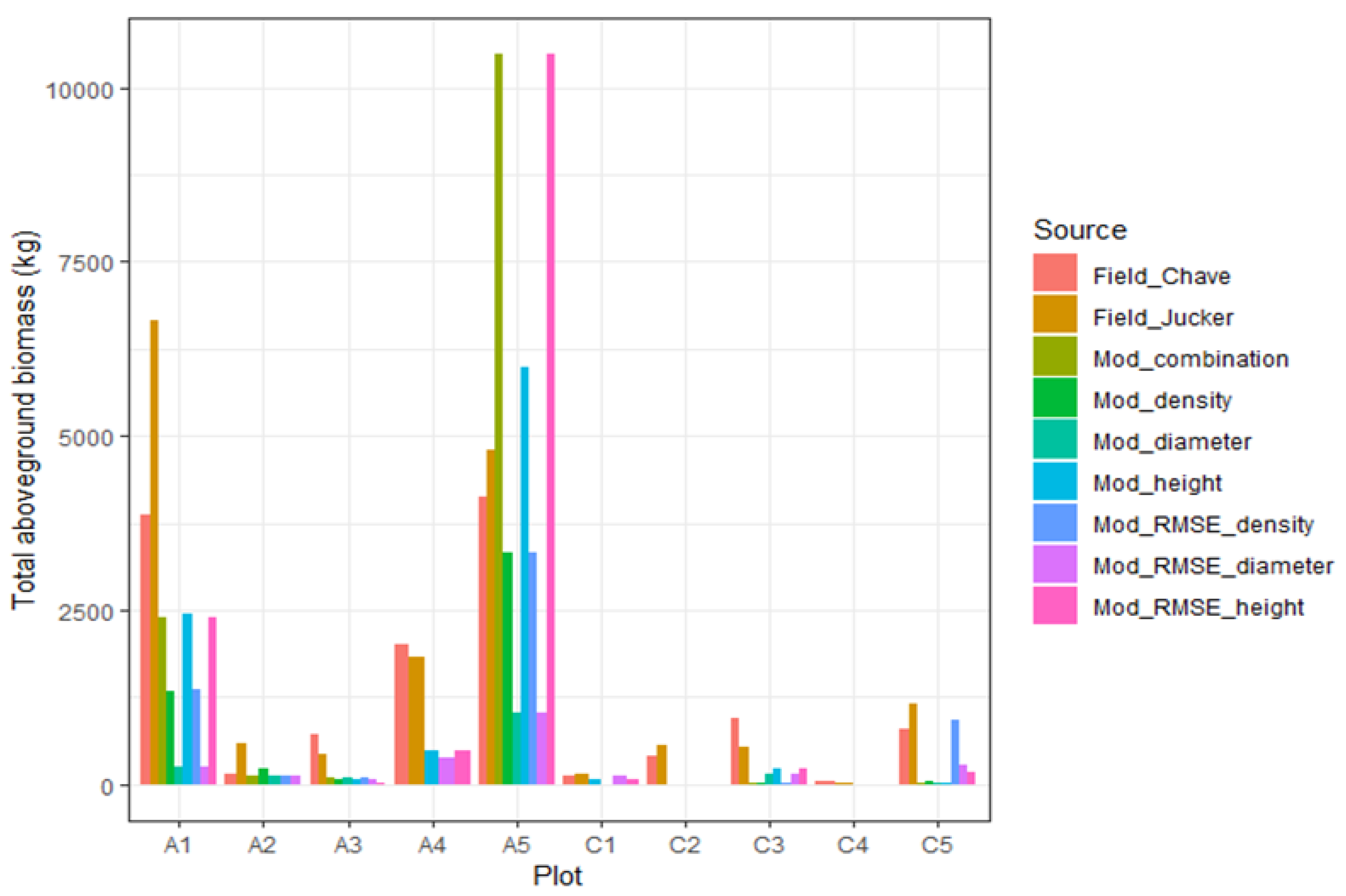
3.6. Biomass Estimation
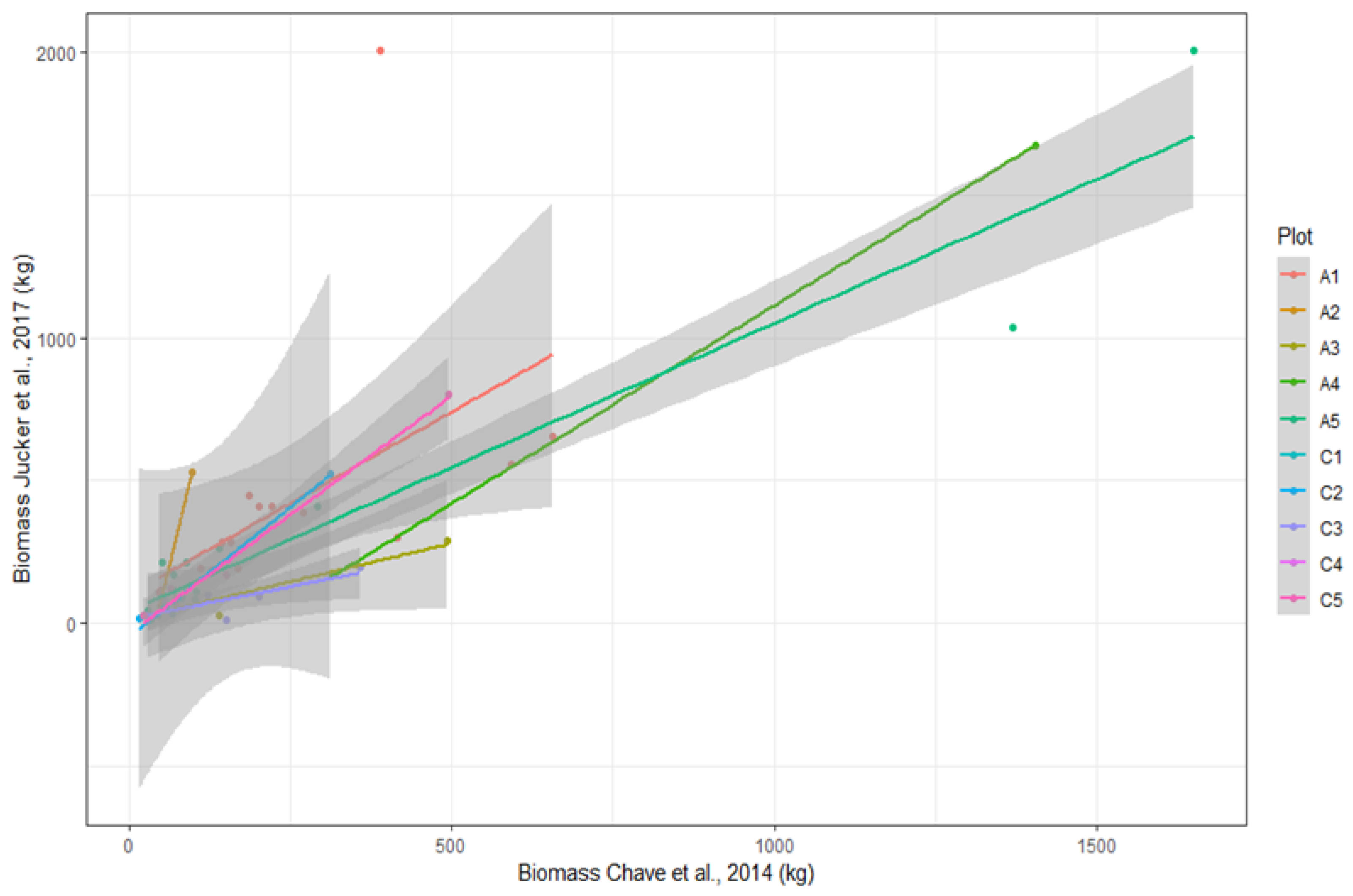
With information obtained from the field measurements, the difference in biomass estimates as the result of the equation selection was compared. The biomass calculated using Equation (3) showed higher mean values compared with Equation (2) in seven plots (
Figure 7), although the standard deviations showed similar values. The average biomass estimated with Equation (3) presented higher values in plots A1, A2, A4, A5, C2, and C5, whilst in A3, C3, and C4, the Equation (2) estimates were higher.
When comparing the biomass estimates from the field measurements against those obtained from the UAS survey, the results and best parameter combinations varied according to the plot. This was expected, since the performance and reliability of UAS surveys is greatly influenced by the site conditions; consequently, the point-cloud classification and individual tree-detection parameters varied between the sites.
The sum of the biomass per plot allows us to compare the differences between parameter combinations and biomass obtained from measured values. When comparing against biomass estimated using Equation (2), the best estimates of biomass for plots A2 (average combination), A5 (lowest RMSE for tree density), C1 (crown diameter), and C5 (tree density) were 127.96, 3324.99, 131.28, and 929.09 kg, respectively, with these values differing from the measured values by less than 25% (
Figure 8). In these plots, the biomass estimated using Equation (2) was lower than that estimated with Equation (3). In plot A1, with the parameter combination for tree height, a biomass estimate of 2446.34 kg was obtained, which was 36% lower than that estimated using Equation (2). In plots A3, A4, C2, C3, and C4, the biomass values estimated from the UAS imagery were 88.46, 490.40, 2.26, 219.76, and 0.028289 kg, respectively. These values differed by more than 75% from the values estimated from the measured tree characteristics on the field using Equation (2). The parameter combination used in these plots was crown diameter (A3, C2), the lowest RMSE for tree height (A4, C3), and tree density (C4).
When comparing the biomass estimates derived from the UAS metrics against those obtained using the measured values and Equation (3), for plots A5, C1, and C5, the parameter combination for tree height, the lowest RMSE for crown diameter, and the lowest RMSE for tree density resulted in differences of less than 25% compared to the measured values. For the rest of the plots, the differences were greater than 50%.
4. Discussion
Traditionally, the study of trees on pasture areas has been performed using measurement plots, the results from which are then extrapolated to the entire pasture area on the studied farms or region. At larger scales, other approaches have used tree coverage information (in terms of percentage), which are superimposed onto the pasture categories on land-cover maps [
50]. While both approaches have improved the understanding of the contribution of trees on pasture areas to carbon budgets, neither adequately captures the heterogeneity within and between farms or landscapes. The use of UASs can be used to complement traditional field measurements and, possibly, to provide an intermediate step between ground- and satellite-based remote sensing.
In the past, only a few studies explored the use of UASs for the study of tree characteristics in livestock landscapes [
29,
30]. In this paper, a new methodology is proposed for using UAS surveys for the assessment of woody vegetation in silvopastoral systems. The methodology relies mainly on open-source (OS) software, making it more accessible in developing countries, where research funding can be scarce [
18,
51]. Although commercial software dominates the field, an increasing number of studies use open source software [
52,
53,
54,
55]. In terms of the processing steps required, in general, increasing the resolution of the photogrammetric analysis resulted in an increase in total processing time of 04:47:34 h from the def to the par1 and 22:14:23 h from the def to the hres settings. Although the proportion of removed points was lower under par1 and high resolution, the best results were found under default characteristics (
Table 4 and
Table 5), making it unnecessary to invest more time, since no improvement could be obtained in the desired outputs. When assessing the performance of different photogrammetry OS software, the authors of [
55] found that WODM default settings performed better in comparison with other OS software, but were less accurate than commercial settings. The plots included in this study differed in tree density and terrain characteristics (
Appendix B), which ultimately had an effect on the ability to correctly identify tree characteristics and biomass estimates (
Figure 8). For example, in plot C4, field measurements recorded only one tree 3.1 m in height, probably causing a low point density in the point cloud and, subsequently, an inability to identify it from the UAV survey data.
4.1. Tree Parameters and Biomass Estimation
Most of the work using UAS for the study of forest characteristics relies either on high-resolution DTM from LiDAR surveys [
26,
56] or high-accuracy GPS [
28,
57] to calculate CHM from DTM. This approach relies entirely on the performance of point-cloud-classification algorithms to correctly differentiate ground from non-ground structures. The authors of [
23] tested the use of UAS-independent metrics to predict forest-growing stocks in flat forest areas in Norway and Italy. Their findings suggest that it is possible to rely only on UAS-DTM-independent metrics to estimate ground-stand volume, with RMSE values similar to those obtained when using a high-resolution DTM. Site conditions, such as terrain slope and tree cover, have an influence on point-cloud-classification performance, although the authors of [
30] suggest that tree coverage is more important for accurate DTM creation. In this study, three of the four plots that had a RMSE between 1.14 and 2.5 m (≥10% relative RMSE) were located in areas with a slope of between 20 and 29°. With the exception of plot A1, the results of this research include lower RMSE values than those reported by the authors of [
28] (1.45 m), who used high-accuracy GPS in a study on restoration areas with terrain slopes between 15 and 30° in Costa Rica, and the values reported by [
26,
56] on forest areas with closed canopies in Japan and Sumatra, respectively. The error associated with tree-height estimation is also influenced by the height of the studied trees; the authors of [
29] reported an RMSE of 3.8 m in trees with heights equal to or lower than 1 m, with a consistent decrease until 1.5 m for trees 2 m in height, and a 0.9-meter RMSE for trees with a height of 8 m. Since this study only considered trees with heights equal to or above 2 m, with the exception of plot A1, the results showed a similar performance. When analyzing the performance of UAS-derived CHM models in estimating crown diameter, the worst performance was found for plot C2, with an average RMSE of 4.43 m, followed by plots A1, C3, and C5, with 1.74, 1.66, and 1.05 m, respectively. In the rest of the plots, the RMSE values varied between 0.1 and 1 m. The authors of [
58] reported RMSE values of 0.73 m for crown width derived from photogrammetry analysis in a eucalyptus plantation in Australia.
Most allometric equations use tree height and DBH as the main parameters to estimate tree biomass [
45]. Nevertheless, it is difficult to obtain DBH from traditional UAS surveys. Whilst previous work has assessed the suitability of using UAS for a full reconstruction of trees [
53], this could require different flying parameters, requiring more time and making the UAS survey less efficient. The authors of [
48] proposed a specific equation for using remote-sensing data in tropical forests, which was proven to result in more reliable biomass estimates when compared with field measurements [
48]. Although several papers have reported a relationship between crown width and DBH [
48,
55], this relationship might be different in trees in agricultural landscapes, because growing conditions differ from those in natural forests, and/or because management practices, such as pruning and foraging, modify crown development. Hence, the crown–DBH relationship was altered, which may have exerted an impact on the final biomass estimates. For example, the authors of [
30] reported a low R2 for equations using crown diameter as a predictor of DBH on
Tectona grandis trees in SPS in Costa Rica. Although biomass estimates present differences in comparison to biomass estimates derived from field measurements, by assessing the error magnitude, these estimates can be useful for reporting carbon stocks in SPS at larger spatial extents.
4.2. Tree-Density Assessment
The preliminary tests of the method for individual tree detection showed that smaller window sizes produced more trees per plot, in some cases splitting large trees into several small trees. Since the nature of this work was exploratory, the range of the detected trees varied across the parameter combinations. Nevertheless, the relative frequency values presented medium agreement for only four plots, with window sizes of 5 for plot A1 and window sizes of 2 for plots A5, C3, and C5. The results suggest that while window size can be an important predictor for correct tree-density assessment, the point-cloud-building and classification parameters played a larger role in the tree-density estimation. The authors of [
29] reported that the proportion of trees found was dependent on the tree height, with trees with heights below 4 m displaying identification rates below 75%, which increased to 90% for trees taller than 4 m. The authors of [
24], using a watershed algorithm, identified 93.8% of the trees in areas with a density of 150 to 325 trees/ha. Due to the quantity of output from the parameter combination (13,680), these results did not consider omission and commission errors separately for every plot; instead, these errors were integrated into a comprehensible and easy-to-calculate index, which represents the percentage difference with visually identified trees, independent of the number of trees in each subplot.
4.3. Spatial Arrangement Assessment
Spatial arrangements have been identified from field measurements by other authors [
59], but the problems with these are the same as those reported for tree measurements, i.e., the elevated costs associated with identifying all of the arrangements. One of the negative effects of trees in pastures, as perceived by farmers [
60], is the shades that trees cause, and their detrimental effect on grass biomass production [
61]. UAS surveys in livestock landscapes could allow areas with excess shade to be identified and, further, allow the distribution of trees to be improved, mitigating the negative effects and increasing the positive effects. The methodology proved useful for identifying tree arrangements on pasture areas, although, in this study, we only classified the arrangements into four categories. Analyzing the clump characteristics (length and width) can improve the classification and contribute to the inference of the functionality of spatial arrangements, depending on their locations on farms.
5. Conclusions
The methodology described in this study provides a tractable and economical approach to studying the presence of trees, as well as their arrangements, spatial distributions, and individual characteristics (such as height and crown diameter) in livestock landscapes, which can be used to estimate ecosystem services, such as carbon storage. Point-cloud classification remains a challenge for improved DTM generation, especially in areas with highly irregular terrain. In this study, tree species were identified with field observations at circular plot level, but this information was not considered at UAS survey level. Thus, the biomass estimates used a generic equation for the entire plot. Accounting for all the species at landscape level includes the same problems as measuring trees at that spatial extent. To overcome this difficulty, one option is the use of orthomosaics for species identification [
33,
62]. Although uncertainty over UAS-derived biomass estimates is still high, the possibility of allocating those estimates spatially, across spatial arrangements and landscapes, can be seen as an improvement in understanding the factors influencing carbon stocks in livestock or agricultural landscapes. The generation of orthomosaics from UAS surveys can also be useful for communicating the importance of tree presence in livestock landscapes to farmers and other stakeholders. The visual assessment of the lack/abundance of trees in the landscape might open up opportunities for reflection and discussion about the role of trees on farms.
A methodology that is suitable for use in developing countries was proposed. It is acknowledged that the use of RTK/PPKGPS, NDVI, or LiDAR sensors may lead to an improvement in the results, but high-quality science should also be affordable as shown using the methods described in this paper, and made more accessible to developing regions, where a lack of resources limits the availability of more sophisticated and expensive sensors and commercial tools.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







