Author Contributions
Conceptualization, N.Z., B.C., Y.B., A.B., P.A., T.G., R.P. and O.C.; methodology, N.Z., B.C., E.H. and P.-A.H.; software, N.Z., B.C., E.H., P.A., T.G. and R.P.; validation, N.Z., B.C., Y.B., A.B., P.A., T.G., R.P., I.D. and O.C.; formal analysis, N.Z., B.C., P.A., T.G. and R.P.; investigation, N.Z., P.-A.H., N.M. and C.B.; resources, N.Z., B.C., V.L., C.B., T.G. and R.P.; data curation, N.Z., B.C., V.L., P.A., T.G. and R.P.; writing—original draft preparation, N.Z., B.C., V.L., E.H., P.A., T.G. and R.P.; writing—review and editing, N.Z., B.C., Y.B., A.B., P.A., T.G., R.P. and O.C.; visualization, N.Z., B.C., V.L., E.H., P.A., T.G. and R.P.; supervision, N.Z., B.C., T.G., R.P. and O.C.; project administration, N.Z.; funding acquisition, N.Z. and A.B. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Output signal P of a cold atom accelerometer. One measurement corresponds to several possible acceleration values , . This ambiguity can be resolved thanks to hybridization with a classical accelerometer. Here, and .
Figure 1.
Output signal P of a cold atom accelerometer. One measurement corresponds to several possible acceleration values , . This ambiguity can be resolved thanks to hybridization with a classical accelerometer. Here, and .
Figure 2.
Typical atom interferometer sequence. After cooling and trapping the atoms, the interferometer is realized with a total duration time . The phase at the output of the interferometer is measured during the subsequent detection phase. The measurement is given with a cycling time . The atomic instrument is only sensitive to acceleration during the interferometer period.
Figure 2.
Typical atom interferometer sequence. After cooling and trapping the atoms, the interferometer is realized with a total duration time . The phase at the output of the interferometer is measured during the subsequent detection phase. The measurement is given with a cycling time . The atomic instrument is only sensitive to acceleration during the interferometer period.
Figure 3.
(a) Principle of the servo-control loop for one accelerometer’s axis. (b) Configuration of the electrodes around the proof-mass for the six-degree-of-freedom control.
Figure 3.
(a) Principle of the servo-control loop for one accelerometer’s axis. (b) Configuration of the electrodes around the proof-mass for the six-degree-of-freedom control.
Figure 4.
Noise performance specifications on the ultra-sensitive axis (USA) of the EAs used in CHAMP, GRACE-FO, GOCE, and foreseen for NGGM.
Figure 4.
Noise performance specifications on the ultra-sensitive axis (USA) of the EAs used in CHAMP, GRACE-FO, GOCE, and foreseen for NGGM.
Figure 5.
Illustration of a GRACE-type (
left) and a Bender-type (
right) flight formation. This figure is extracted from [
66].
Figure 5.
Illustration of a GRACE-type (
left) and a Bender-type (
right) flight formation. This figure is extracted from [
66].
Figure 6.
ASD of the EA/CAI hybridization scenario and a regular EA assuming a noise slope and corner frequencies (cf) of 0.3 mHz (a), 1 mHz (b), and 3 mHz (c). The dotted line depicts the spectrum common to the respective hybridization scenario and the stand-alone EA. Vertical dashed grey lines represent the maximal contributing observation frequency to spherical harmonic coefficients of the given degree. The thick dashed grey line represents the laser ranging interferometer noise in terms of range accelerations.
Figure 6.
ASD of the EA/CAI hybridization scenario and a regular EA assuming a noise slope and corner frequencies (cf) of 0.3 mHz (a), 1 mHz (b), and 3 mHz (c). The dotted line depicts the spectrum common to the respective hybridization scenario and the stand-alone EA. Vertical dashed grey lines represent the maximal contributing observation frequency to spherical harmonic coefficients of the given degree. The thick dashed grey line represents the laser ranging interferometer noise in terms of range accelerations.
Figure 7.
Scheme of the hybrid lab prototype comprising a cold atom gravimeter and an electrostatic accelerometer. In this configuration, the proof-mass of the EA acts as the retro-reflecting Raman mirror, the reference mirror for the CAI measurement.
Figure 7.
Scheme of the hybrid lab prototype comprising a cold atom gravimeter and an electrostatic accelerometer. In this configuration, the proof-mass of the EA acts as the retro-reflecting Raman mirror, the reference mirror for the CAI measurement.
Figure 8.
Representation of the experimental setup ((a) side view and (b) top view) used to study rotation impact on the CAI and to demonstrate rotation compensation through EA proof-mass actuation. The dimensions are not to scale. The distance between PZT A–PZT B and PZT B–PZT C is 56 cm.
Figure 8.
Representation of the experimental setup ((a) side view and (b) top view) used to study rotation impact on the CAI and to demonstrate rotation compensation through EA proof-mass actuation. The dimensions are not to scale. The distance between PZT A–PZT B and PZT B–PZT C is 56 cm.
Figure 9.
Global view of the software simulator for the in-orbit operation of the hybrid accelerometer.
Figure 9.
Global view of the software simulator for the in-orbit operation of the hybrid accelerometer.
Figure 10.
Global structure of the hybridization algorithm.
Figure 10.
Global structure of the hybridization algorithm.
Figure 11.
Degree RMS of residual coefficients for a GRACE-type mission under consideration of the static gravity field signal and a hybrid accelerometer with a EA noise slope for an EA corner frequency (a) of 0.3 mHz (left), (b) of 1 mHz (center), and (c) of 3 mHz (right). The respective formal errors are shown as dashed lines of the corresponding color.
Figure 11.
Degree RMS of residual coefficients for a GRACE-type mission under consideration of the static gravity field signal and a hybrid accelerometer with a EA noise slope for an EA corner frequency (a) of 0.3 mHz (left), (b) of 1 mHz (center), and (c) of 3 mHz (right). The respective formal errors are shown as dashed lines of the corresponding color.
Figure 12.
Degree RMS of residual coefficients for a Bender-type mission under consideration of the static gravity field signal and a hybrid accelerometer with a EA noise slope for an EA corner frequency (a) of 0.3 mHz, (b) of 1 mHz, and (c) of 3 mHz. The respective formal errors are shown as dashed lines of the corresponding color.
Figure 12.
Degree RMS of residual coefficients for a Bender-type mission under consideration of the static gravity field signal and a hybrid accelerometer with a EA noise slope for an EA corner frequency (a) of 0.3 mHz, (b) of 1 mHz, and (c) of 3 mHz. The respective formal errors are shown as dashed lines of the corresponding color.
Figure 13.
Relative improvement of the formal errors for Case 3 (a) and Case 4 (b) towards the EA scenario for a GRACE-type mission under consideration of the static gravity field signal and a hybrid accelerometer with a EA noise slope, as well as an EA corner frequency of 1 mHz. Global geoid height errors are shown for EA-only (c), Case 3 (a’), and Case 4 (b’).
Figure 13.
Relative improvement of the formal errors for Case 3 (a) and Case 4 (b) towards the EA scenario for a GRACE-type mission under consideration of the static gravity field signal and a hybrid accelerometer with a EA noise slope, as well as an EA corner frequency of 1 mHz. Global geoid height errors are shown for EA-only (c), Case 3 (a’), and Case 4 (b’).
Figure 14.
Drag signal model at a 361 km altitude, extrapolated from [
71].
Figure 14.
Drag signal model at a 361 km altitude, extrapolated from [
71].
Figure 15.
Retrieval error with scale factor and instrument noise contributors, considering a stand-alone EA (a) and the corresponding LOS projection (b).
Figure 15.
Retrieval error with scale factor and instrument noise contributors, considering a stand-alone EA (a) and the corresponding LOS projection (b).
Figure 16.
Retrieval error contributors with scale factor and instrument noise contributors, considering a Case 2 1D-hybridized instrument (a) and the corresponding LOS projection (b).
Figure 16.
Retrieval error contributors with scale factor and instrument noise contributors, considering a Case 2 1D-hybridized instrument (a) and the corresponding LOS projection (b).
Figure 17.
ASD acceleration noise for the EA (black curve), the cold atom gravimeter (blue curve), and the EA corrected by the CAI through a hybridization algorithm (red curve). The interrogation time of the CAI was set to ms to highlight the interest of hybridization and reproducing qualitatively the noise assumptions treated in the numerical gravity simulations. Note that, at a high frequency ( Hz), the red curve is completely superimposed on the black one.
Figure 17.
ASD acceleration noise for the EA (black curve), the cold atom gravimeter (blue curve), and the EA corrected by the CAI through a hybridization algorithm (red curve). The interrogation time of the CAI was set to ms to highlight the interest of hybridization and reproducing qualitatively the noise assumptions treated in the numerical gravity simulations. Note that, at a high frequency ( Hz), the red curve is completely superimposed on the black one.
Figure 18.
EA’s PM rotation and impact on CAI’s contrast. (a) Proof-mass angle measurement during the interferometer phase delimited by the three laser pulse detected thanks to a photodiode (red signal). The rotation excitation is made at 10.87 Hz with an amplitude of 106 rad p-p. Two excitation phases are represented, 0 rad (black) and rad (blue). The excitation phase is defined relative to the first Raman laser pulse of the CAI. The dashed yellow lines are sine-fitting functions. (b) Evolution of the atomic contrast according to the excitation phase for a 10.87 Hz sine excitation of amplitude 106 rad p-p. The experimental data are represented in black dots with error bars. The red dashed line results from a calculation of contrast loss using as inputs the same experimental excitation parameters. The interrogation time of the CAI is ms.
Figure 18.
EA’s PM rotation and impact on CAI’s contrast. (a) Proof-mass angle measurement during the interferometer phase delimited by the three laser pulse detected thanks to a photodiode (red signal). The rotation excitation is made at 10.87 Hz with an amplitude of 106 rad p-p. Two excitation phases are represented, 0 rad (black) and rad (blue). The excitation phase is defined relative to the first Raman laser pulse of the CAI. The dashed yellow lines are sine-fitting functions. (b) Evolution of the atomic contrast according to the excitation phase for a 10.87 Hz sine excitation of amplitude 106 rad p-p. The experimental data are represented in black dots with error bars. The red dashed line results from a calculation of contrast loss using as inputs the same experimental excitation parameters. The interrogation time of the CAI is ms.
Figure 19.
Contrast loss due to platform excitation with a sine actuation at 8.1 Hz around the Z axis. The angular velocity of the platform is measured thanks to a gyroscope. The red dashed line represents a Gaussian fit, in agreement with the expected contrast decrease. The interrogation time of the CAI is ms.
Figure 19.
Contrast loss due to platform excitation with a sine actuation at 8.1 Hz around the Z axis. The angular velocity of the platform is measured thanks to a gyroscope. The red dashed line represents a Gaussian fit, in agreement with the expected contrast decrease. The interrogation time of the CAI is ms.
Figure 20.
(a) Active rotation compensation impact on the CAI contrast for a platform excitation at 5.435 Hz. The variation of the CAI contrast is reported according to the gain amplitude of the compensation signal. (b) PM angular velocity amplitude (left axis) and angular amplitude (right axis) according to the compensation gain. For 0 gain, the proof-mass is not moved and the CAI contrast loss is only due to platform rotation. For a gain of 2.6 (×2000), the CAI contrast is retrieved at a maximum of ≈85%. For a gain of 5.3(×2000), the atomic contrast returns to a value similar to that obtained with only the platform excited and the PM motionless.
Figure 20.
(a) Active rotation compensation impact on the CAI contrast for a platform excitation at 5.435 Hz. The variation of the CAI contrast is reported according to the gain amplitude of the compensation signal. (b) PM angular velocity amplitude (left axis) and angular amplitude (right axis) according to the compensation gain. For 0 gain, the proof-mass is not moved and the CAI contrast loss is only due to platform rotation. For a gain of 2.6 (×2000), the CAI contrast is retrieved at a maximum of ≈85%. For a gain of 5.3(×2000), the atomic contrast returns to a value similar to that obtained with only the platform excited and the PM motionless.
Figure 21.
ASD of noise for the EA HybridSTAR given for the three axis in case of a non-rotating proof-mass.
Figure 21.
ASD of noise for the EA HybridSTAR given for the three axis in case of a non-rotating proof-mass.
Figure 22.
ASD of the acceleration noise, for the electrostatic accelerometer in black, the atom interferometer in blue, and the resulting combination in red. These data are provided by the developed hybrid instrument simulator.
Figure 22.
ASD of the acceleration noise, for the electrostatic accelerometer in black, the atom interferometer in blue, and the resulting combination in red. These data are provided by the developed hybrid instrument simulator.
Figure 23.
Interferometric signal when using a fixed CAI reference mirror (yellow) and when using the electrostatic proof-mass, acting as the reference mirror, to compensate for the satellite rotation (purple). The simulation is performed with a simulated atomic cloud of 100 atoms, a standard deviation of the atomic velocities of 2.5 mm/s, of the initial atomic positions of 2 mm, and an interrogation time of s.
Figure 23.
Interferometric signal when using a fixed CAI reference mirror (yellow) and when using the electrostatic proof-mass, acting as the reference mirror, to compensate for the satellite rotation (purple). The simulation is performed with a simulated atomic cloud of 100 atoms, a standard deviation of the atomic velocities of 2.5 mm/s, of the initial atomic positions of 2 mm, and an interrogation time of s.
Figure 24.
Control of the electrostatic proof-mass angular position during an interferometric cycle. The angular velocity to be compensated between (first CAI laser pulse) and (last CAI laser pulse) is represented in red.
Figure 24.
Control of the electrostatic proof-mass angular position during an interferometric cycle. The angular velocity to be compensated between (first CAI laser pulse) and (last CAI laser pulse) is represented in red.
Figure 25.
HybridSTAR accelerometer noise performance obtained with the hybrid instrument simulator. The EA’s proof-mass is rotated around the Y axis for satellite rotation compensation. The noise along the radial axis Z is slightly degraded due to this functionality.
Figure 25.
HybridSTAR accelerometer noise performance obtained with the hybrid instrument simulator. The EA’s proof-mass is rotated around the Y axis for satellite rotation compensation. The noise along the radial axis Z is slightly degraded due to this functionality.
Figure 26.
(a) Dependence of the acceleration sensitivity according to the interrogation time T. The dashed red line shows the sensitivity decrease, scaling as . (b) Dependence of the number of detected atoms according to the interrogation time T.
Figure 26.
(a) Dependence of the acceleration sensitivity according to the interrogation time T. The dashed red line shows the sensitivity decrease, scaling as . (b) Dependence of the number of detected atoms according to the interrogation time T.
Figure 27.
Contrast loss due to the different rotation terms for a satellite in orbit.
Figure 27.
Contrast loss due to the different rotation terms for a satellite in orbit.
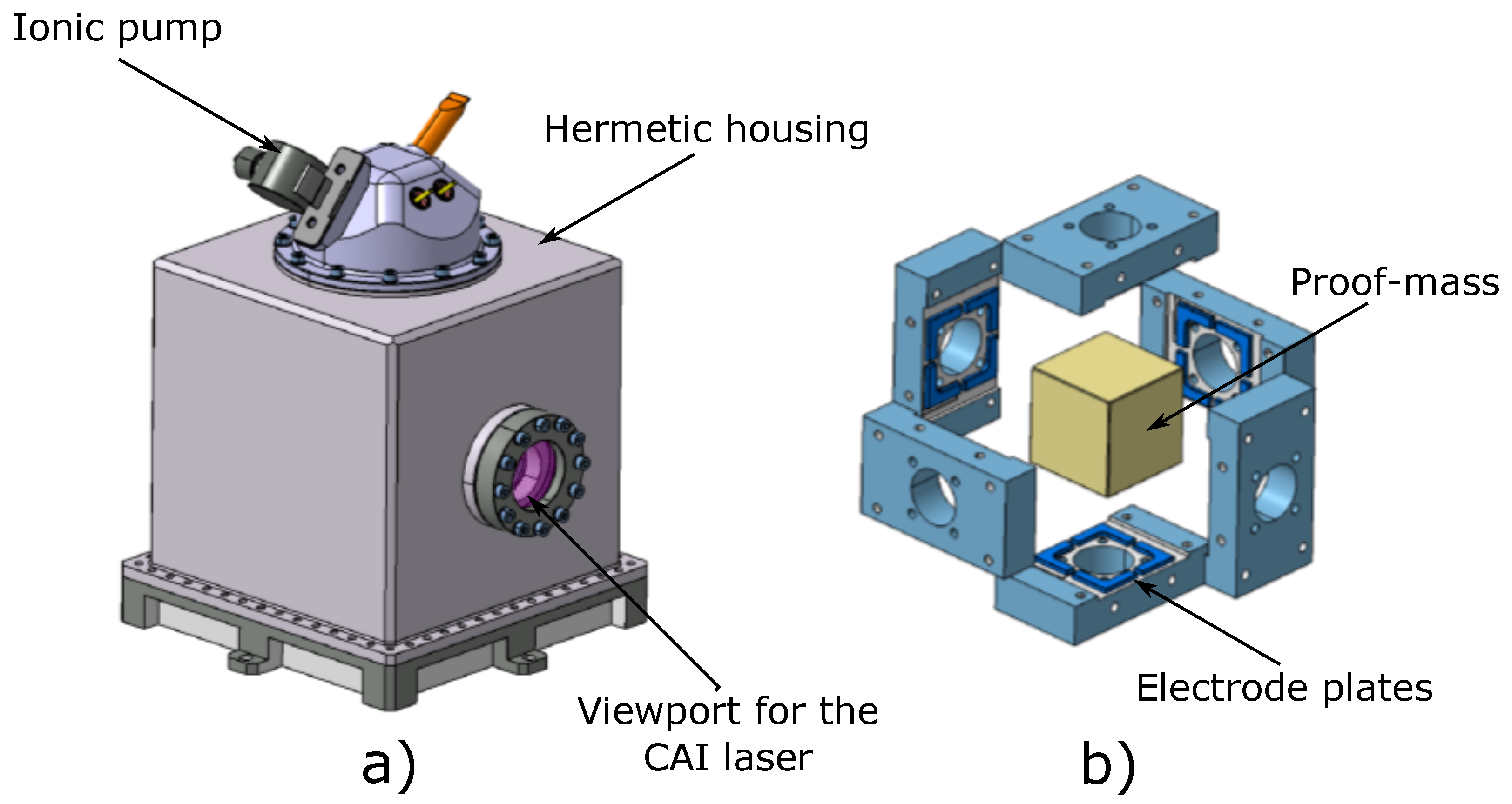
Figure 28.
(a) HybridSTAR electrostatic accelerometer. (b) HybridSTAR electrode plates with the cubic proof-mass.
Figure 28.
(a) HybridSTAR electrostatic accelerometer. (b) HybridSTAR electrode plates with the cubic proof-mass.
Figure 29.
(a) HybridSTAR accelerometer performance on the along-track and cross-track axis. (b) HybridSTAR accelerometer performance on the radial axis.
Figure 29.
(a) HybridSTAR accelerometer performance on the along-track and cross-track axis. (b) HybridSTAR accelerometer performance on the radial axis.
Figure 30.
(a) Global hybrid instrument architecture. (b) Exploded view of the hybrid architecture.
Figure 30.
(a) Global hybrid instrument architecture. (b) Exploded view of the hybrid architecture.
Figure 31.
Temporal sequence describing the intermittent mode. The standard mode (up) allows acceleration measurements each . In the intermittent mode (bottom), the measurements are now only each . In this example, we take . In between, the CAI is put in low power consumption mode (standby mode) allowing lowering the average electrical power consumption.
Figure 31.
Temporal sequence describing the intermittent mode. The standard mode (up) allows acceleration measurements each . In the intermittent mode (bottom), the measurements are now only each . In this example, we take . In between, the CAI is put in low power consumption mode (standby mode) allowing lowering the average electrical power consumption.
Figure 32.
Evolution of the CAI noise (QPN) due to intermittent operation for an interrogation time s and a cycling time s in standard mode. The orange, purple, and green curves correspond, respectively, to an effective measurement cycling time of 6 s (), 42 s (), and 402 s ().
Figure 32.
Evolution of the CAI noise (QPN) due to intermittent operation for an interrogation time s and a cycling time s in standard mode. The orange, purple, and green curves correspond, respectively, to an effective measurement cycling time of 6 s (), 42 s (), and 402 s ().
Table 1.
Main characteristics of the last flying space EAs in CHAMP, GOCE, and GRACE-FO and the foreseen EAs for NGGM, the future ESA mission. For CHAMP, the mass and power consumption do not take into account the interface and control unit (ICU). USA and LSA stand, respectively, for ultra-sensitive axis and less-sensitive axis. For instance, in GRACE-FO, the USAs are the along-track and radial axes and the LSA is the cross-track axis.
Table 1.
Main characteristics of the last flying space EAs in CHAMP, GOCE, and GRACE-FO and the foreseen EAs for NGGM, the future ESA mission. For CHAMP, the mass and power consumption do not take into account the interface and control unit (ICU). USA and LSA stand, respectively, for ultra-sensitive axis and less-sensitive axis. For instance, in GRACE-FO, the USAs are the along-track and radial axes and the LSA is the cross-track axis.
| EA | Space Missions |
|---|
| Characteristics | CHAMP | GOCE | GRACE-FO | NGGM |
| PM mass (g) | 72 | 320 | 72 | 507 |
| GAP USA (m) | 75 | 299 | 175 | 300 |
| GAP LSA (m) | 60 | 32 | 60 | 300 |
| Meas. range USA [m·s] | | | | |
| Meas. range LSA [m·s] | | | | |
| Noise floor USA [m·s
·Hz] | | | | |
| Noise floor LSA [m·s·Hz] | | | | |
| Total Mass [kg] (w. elec.) | 10 (w/o ICU) | 9 | 11 | 15 |
| Total Elec. Cons. [W] | 2 (w/o ICU) | 9 | 11 | 15 |
| Total Volume [L] | 13 (w/o ICU) | 11 | 14 | 16 |
Table 2.
Accelerometer parameters for simulations.
Table 2.
Accelerometer parameters for simulations.
| Parameter | Value | Unit |
|---|
| CAI Noise level | Case 1 | 4 | m·
s·Hz |
| Case 2 | 1 × |
| Case 3 | 1 × |
| Case 4 | 1 × |
| EA corner frequency | | 0.3 | mHz |
| | 1 |
| | 3 |
| EA low-frequency noise slope | | | - |
| | |
| | |
Table 3.
CAI parameters for scale factor uncertainty estimations. refers to the uncertainty on the parameter i.
Table 3.
CAI parameters for scale factor uncertainty estimations. refers to the uncertainty on the parameter i.
| Parameters | m | = 50 s | s | |
|---|
| Uncertainty | | ns | ns | |
Table 4.
Estimation of main errors coming from the coupling of the atomic source kinematics with the satellite rotation and the Earth gravity gradient. The estimations with rotation compensation are given considering a satellite rotation compensation with a residual at a level of 100 nrad/s.
Table 4.
Estimation of main errors coming from the coupling of the atomic source kinematics with the satellite rotation and the Earth gravity gradient. The estimations with rotation compensation are given considering a satellite rotation compensation with a residual at a level of 100 nrad/s.
| | Acc. Stab. | Acc. Stab. | Acc. Stab |
|---|
| Inertial Terms | without rot. Comp. | with rot. Comp. | with rot. Comp. |
|---|
| | | Around Y | Around Y and Z |
|---|
| | | | |
| | | |
| | | |
| | | |
| | | |
| | | |
| | |
| | |
Table 5.
Assumptions on CAI atomic source parameters and satellite rotation parameters. refers to the amplitude of variation impacting parameter i.
Table 5.
Assumptions on CAI atomic source parameters and satellite rotation parameters. refers to the amplitude of variation impacting parameter i.
| | mrad/s | mrad/s (max) |
| m | 1 mm/s | rad·s (max, all axes) |
Table 6.
Size, weight, and power budget for the hybrid instrument. Note that the CAI budget for the electronics, laser, and microwave system was extrapolated by taking into account the PHARAO’s flight model budget [
87,
88].
Table 6.
Size, weight, and power budget for the hybrid instrument. Note that the CAI budget for the electronics, laser, and microwave system was extrapolated by taking into account the PHARAO’s flight model budget [
87,
88].
| | Physics Package | Electronics/Laser/MW | Whole Instrument |
|---|
| | Size | Weight | Size | Weight | Power | Size | Weight | Power |
|---|
| EA | 7 L | 6 kg | 9 L | 6 kg | 45 W | 16 L | 12 kg | 45 W |
| CAI | 36 L | 24 kg | 57 L | 39 kg | 100 W | 93 L | 63 kg | 100 W |
| Hybrid | 43 L | 30 kg | 66 L | 45 kg | 145 W | 109 L | 75 kg | 145 W |


 ,
, 


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}