
Optimizing Local Alignment along the Seamline for Parallax-Tolerant Orthoimage Mosaicking




Abstract
:
1. Introduction
2. Related Work
2.1. Optimal Seamline Detection
2.2. Image Warping Methods
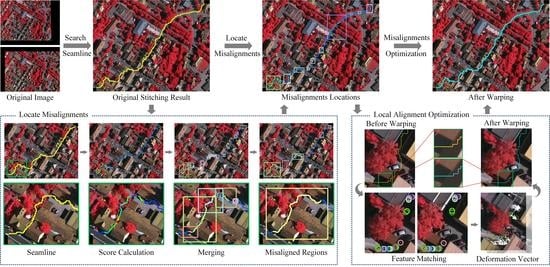
3. The Proposed Local Alignment Optimization Approach
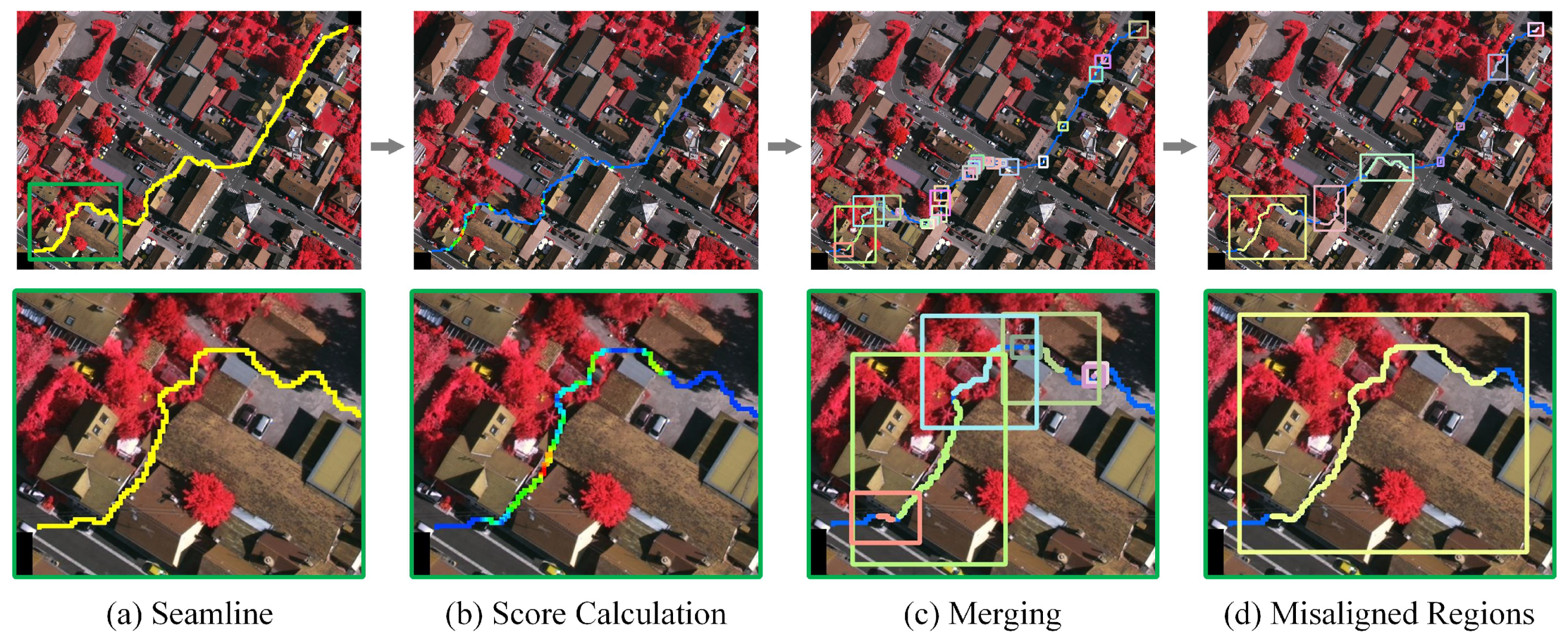
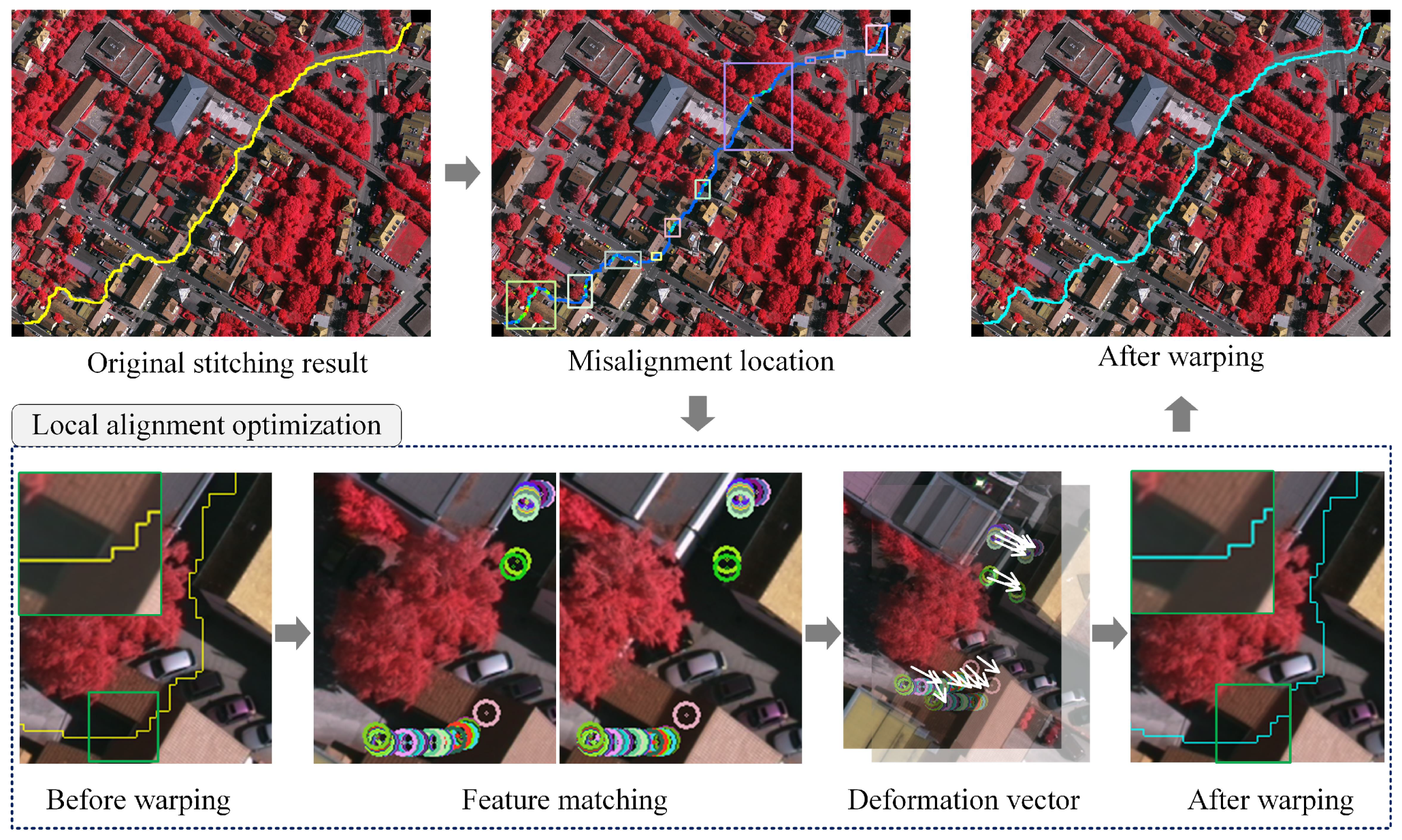
3.1. Misalignment Location
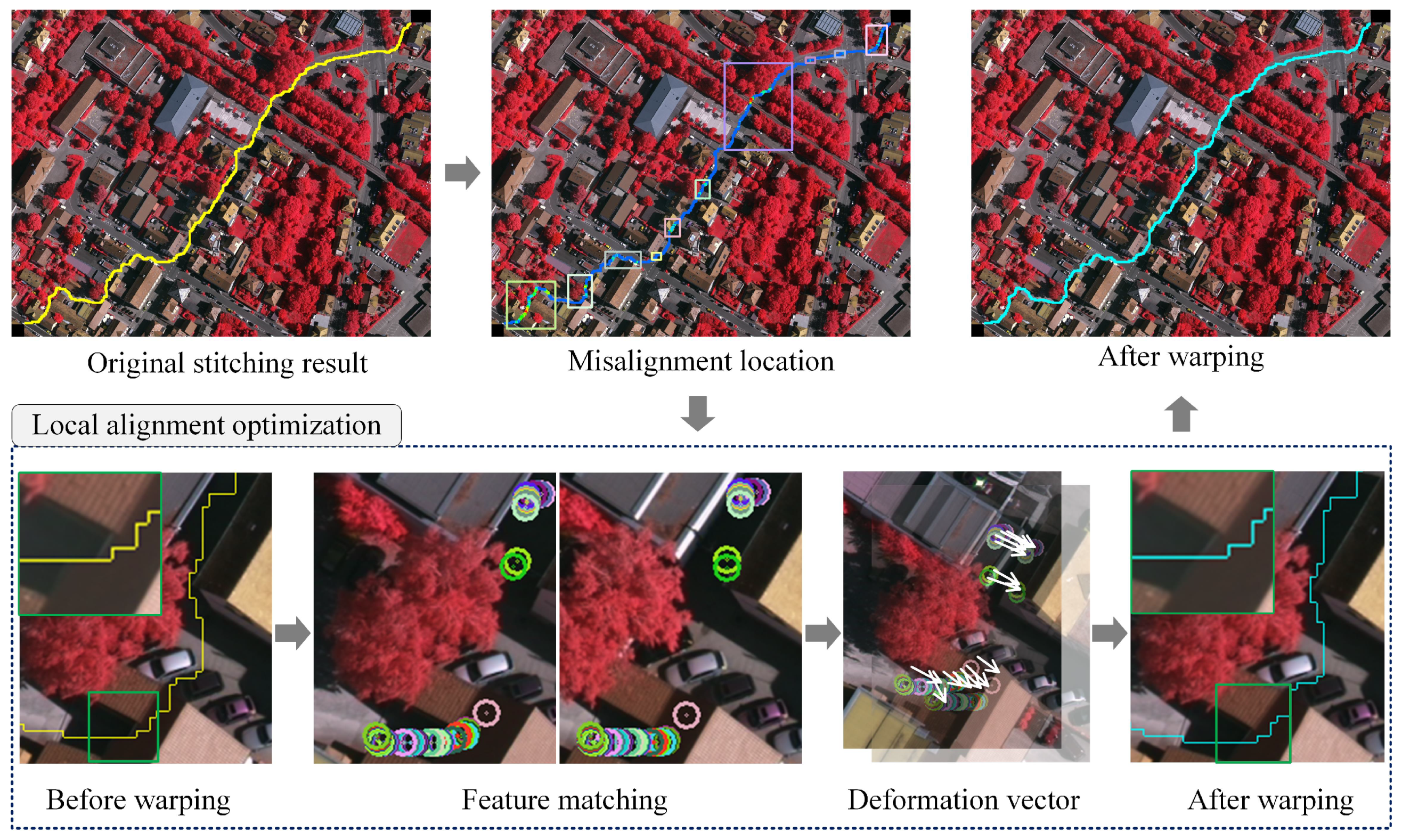
3.2. Local Alignment Optimization
3.2.1. Feature Matching
3.2.2. Deformation Map
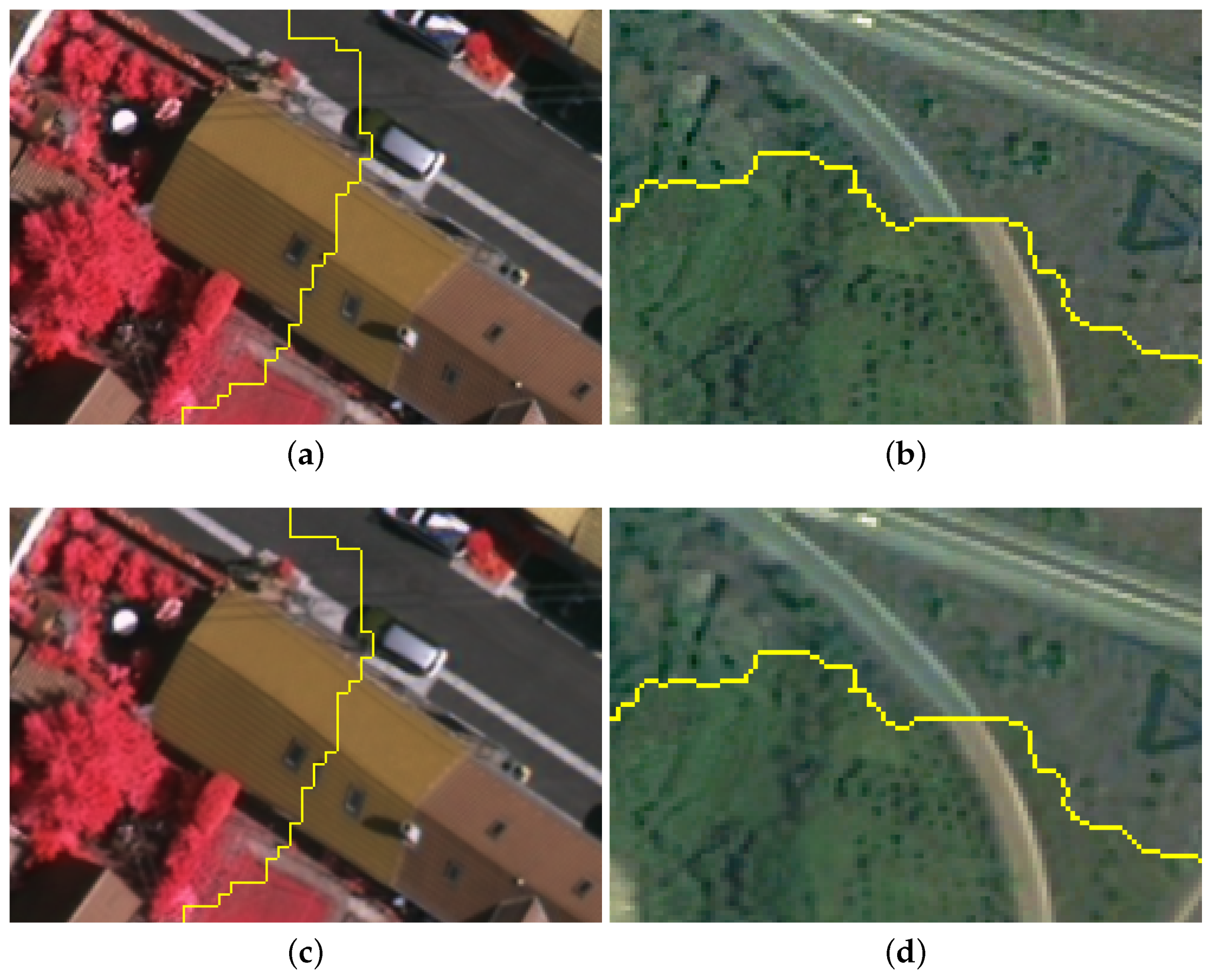
4. Experimental Results and Discussion
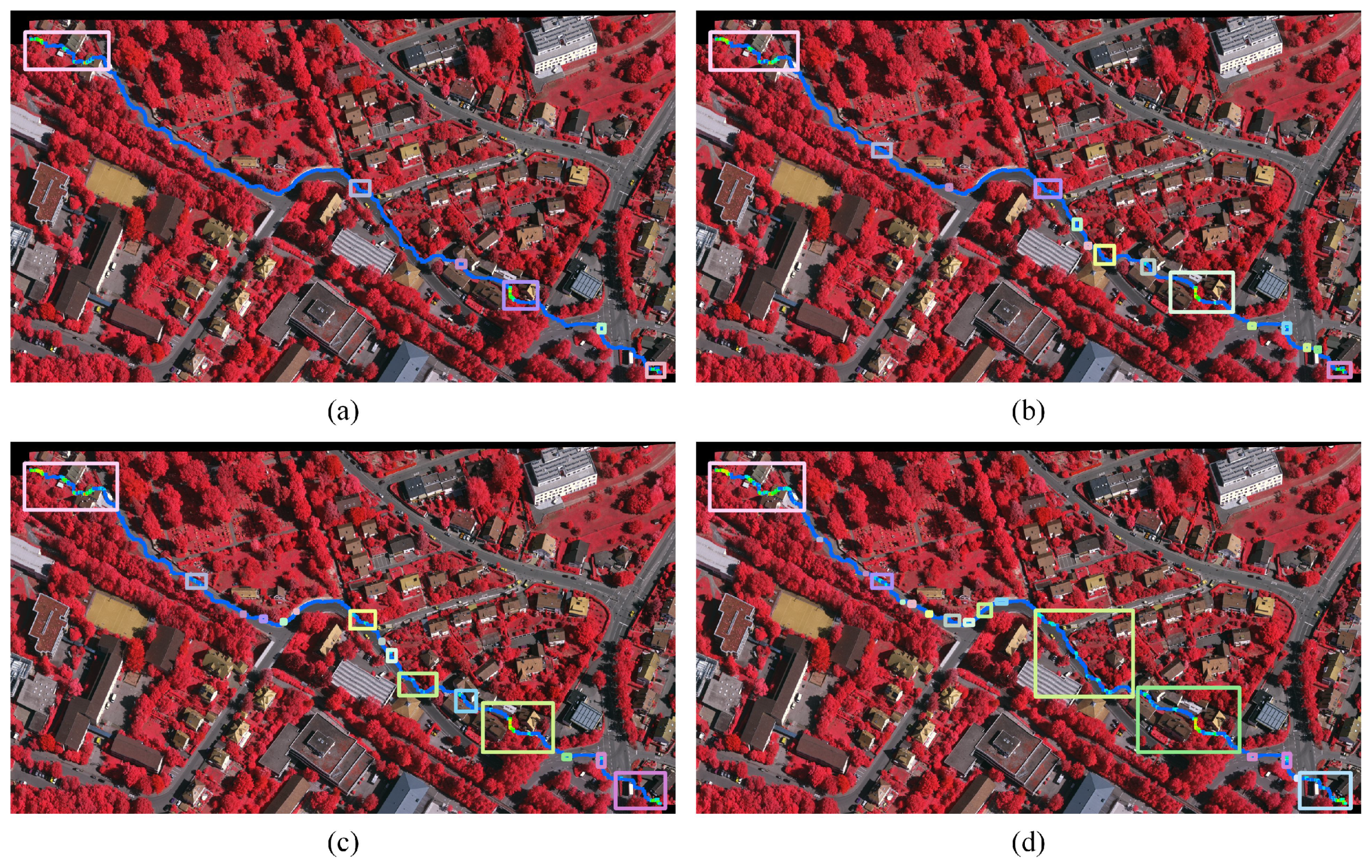
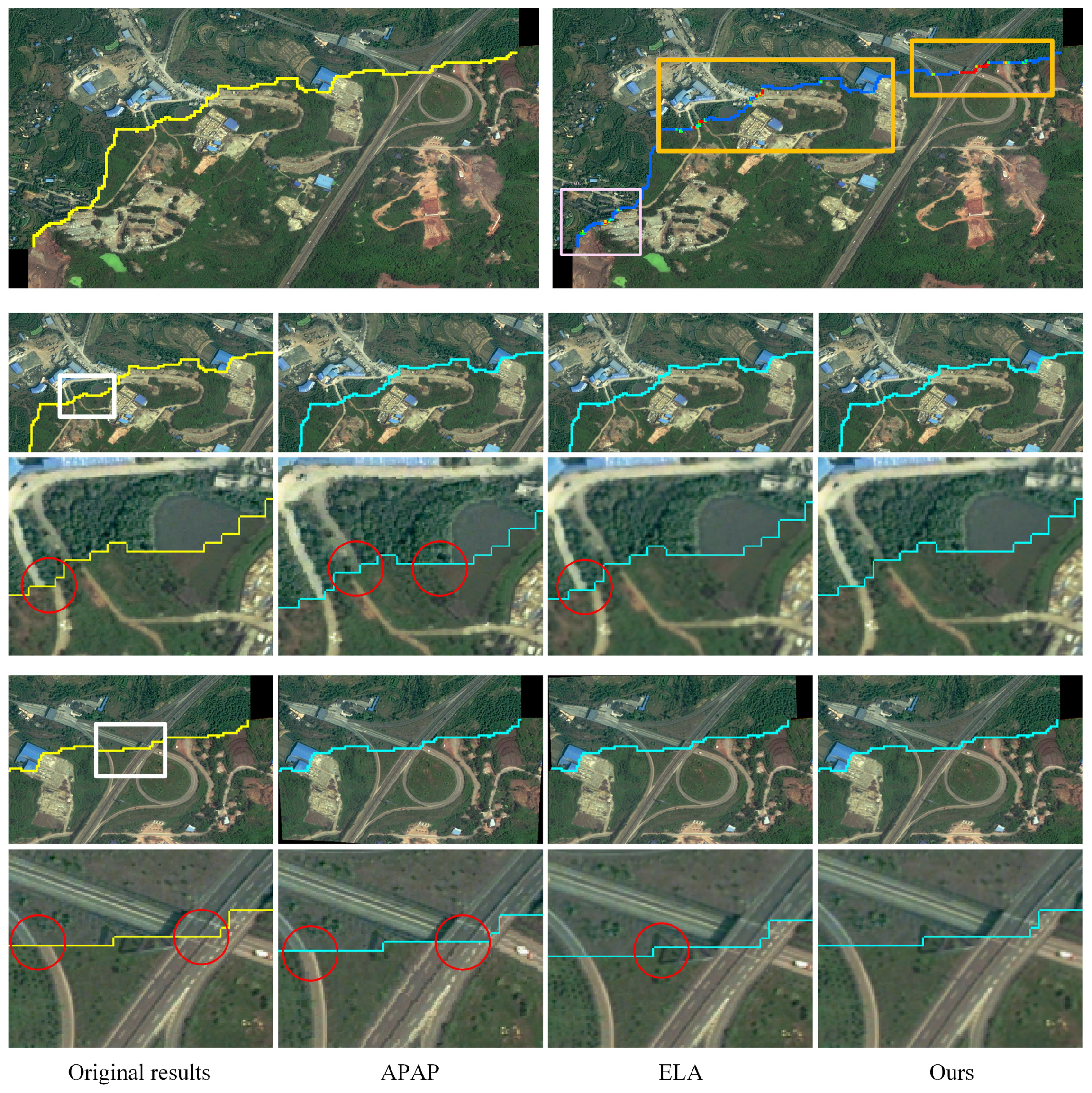
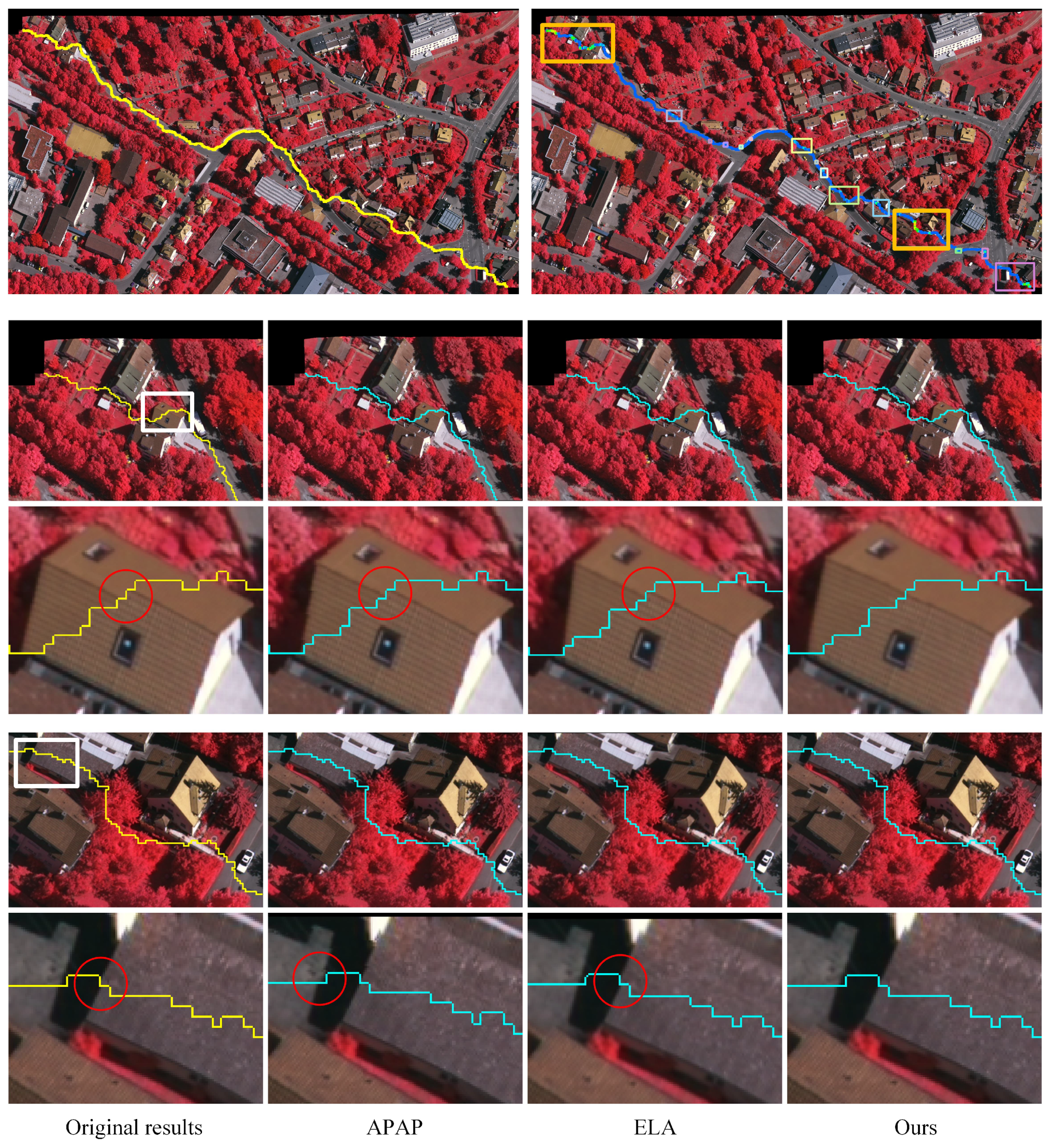
4.1. Qualitative Evaluation
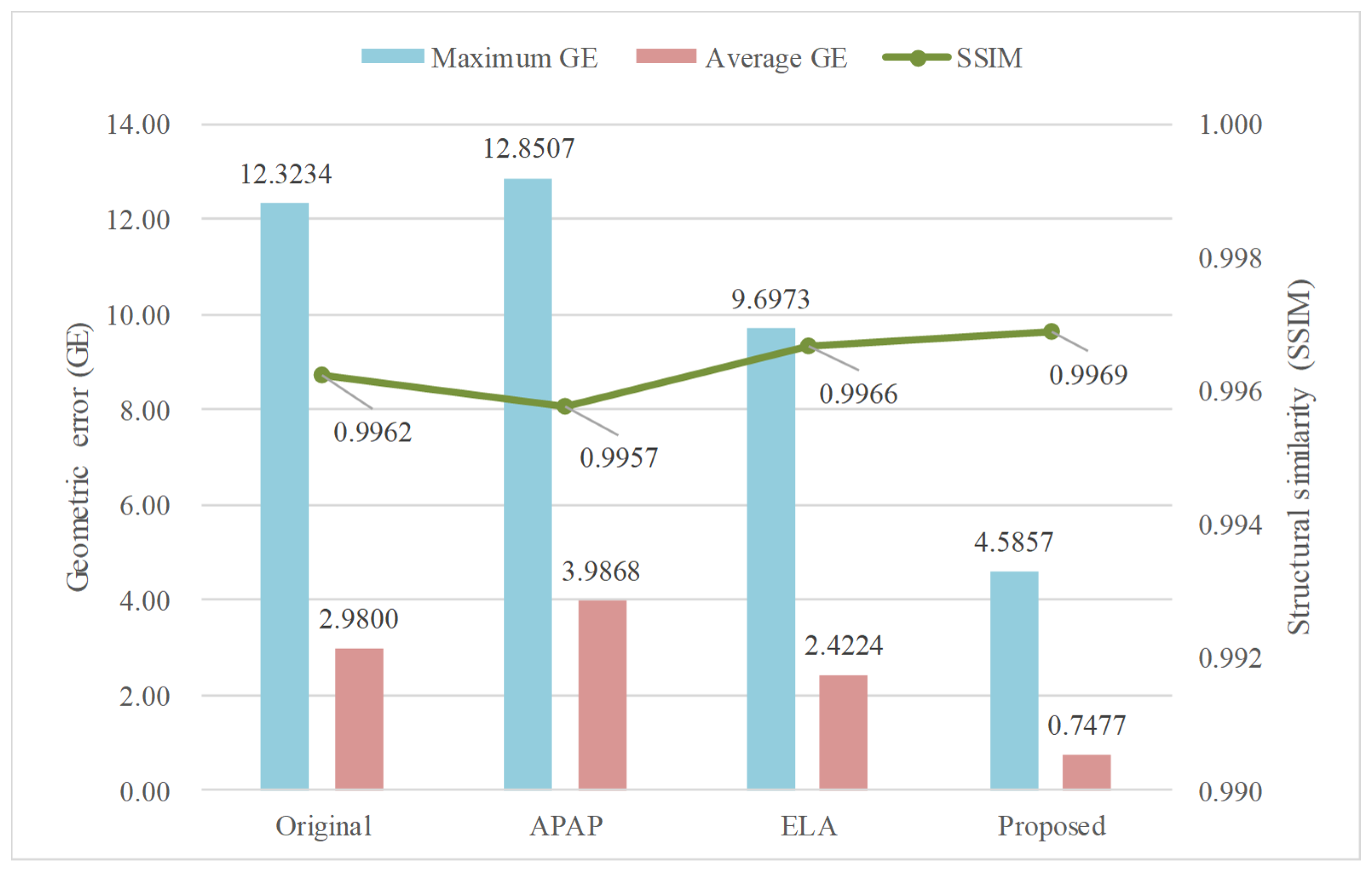
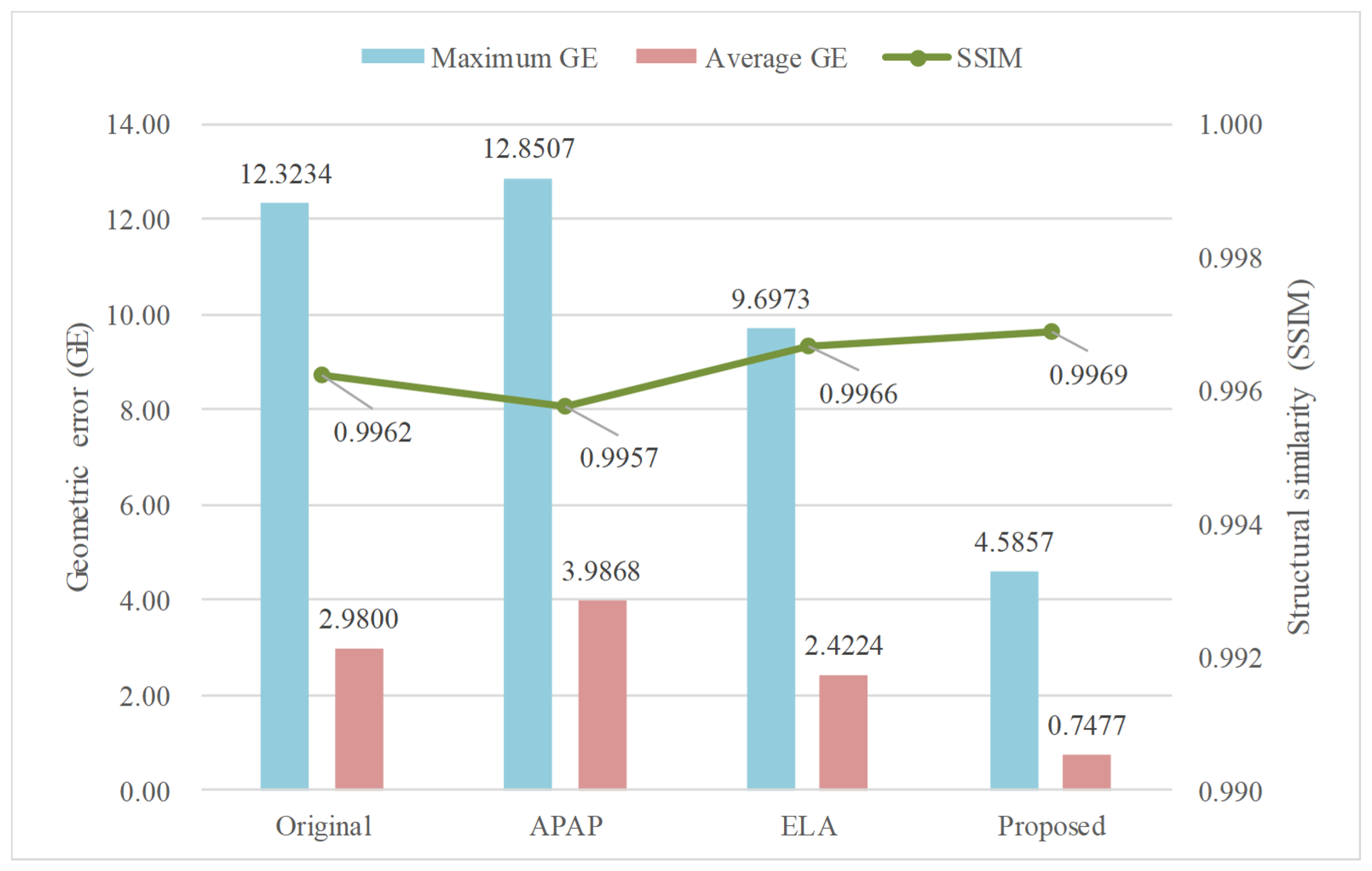
4.2. Quantitative Evaluation
5. Conclusions
- We propose a similarity measure-based method for local misalignment location, which makes it possible to process local regions independently.
- We propose a local alignment optimization method based on semi-global matching, which can effectively eliminate geometric misalignment on the seamline.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pan, J.; Wang, M.; Li, D.; Li, J. Automatic generation of seamline network using area Voronoi diagrams with overlap. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1737–1744. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, X. A coarse-to-fine weakly supervised learning method for green plastic cover segmentation using high-resolution remote sensing images. ISPRS J. Photogramm. Remote Sens. 2022, 188, 157–176. [Google Scholar] [CrossRef]
- Meng, Y.; Chen, S.; Liu, Y.; Li, L.; Zhang, Z.; Ke, T.; Hu, X. Unsupervised building extraction from multimodal aerial data based on accurate vegetation removal and image feature consistency constraint. Remote Sens. 2022, 14, 1912. [Google Scholar] [CrossRef]
- Jiang, Q.; Fang, S.; Peng, Y.; Gong, Y.; Zhu, R.; Wu, X.; Ma, Y.; Duan, B.; Liu, J. UAV-based biomass estimation for rice-combining spectral, TIN-based structural and meteorological features. Remote Sens. 2019, 11, 890. [Google Scholar] [CrossRef] [Green Version]
- Tran, D.Q.; Park, M.; Jung, D.; Park, S. Damage-map estimation using UAV images and deep learning algorithms for disaster management system. Remote Sens. 2020, 12, 4169. [Google Scholar] [CrossRef]
- Li, X.; Feng, R.; Guan, X.; Shen, H.; Zhang, L. Remote sensing image mosaicking: Achievements and challenges. IEEE Geosci. Remote Sens. Mag. 2019, 7, 8–22. [Google Scholar] [CrossRef]
- Pandey, A.; Pati, U.C. Image mosaicing: A deeper insight. Image Vis. Comput. 2019, 89, 236–257. [Google Scholar] [CrossRef]
- Pan, J.; Wang, M.; Li, D.; Li, J. A network-based radiometric equalization approach for digital aerial orthoimages. IEEE Geosci. Remote Sens. Lett. 2010, 7, 401–405. [Google Scholar] [CrossRef]
- Li, J.; Hu, Q.; Ai, M. Optimal illumination and color consistency for optical remote-sensing image mosaicking. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1943–1947. [Google Scholar] [CrossRef]
- Xia, M.; Yao, J.; Gao, Z. A closed-form solution for multi-view color correction with gradient preservation. ISPRS J. Photogramm. Remote Sens. 2019, 157, 188–200. [Google Scholar] [CrossRef]
- Liu, K.; Ke, T.; Tao, P.; He, J.; Xi, K.; Yang, K. Robust radiometric normalization of multitemporal satellite images via block adjustment without master images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6029–6043. [Google Scholar] [CrossRef]
- Li, L.; Li, Y.; Xia, M.; Li, Y.; Yao, J.; Wang, B. Grid model-based global color correction for multiple image mosaicking. IEEE Geosci. Remote Sens. Lett. 2020, 18, 2006–2010. [Google Scholar] [CrossRef]
- Li, Y.; Yin, H.; Yao, J.; Wang, H.; Li, L. A unified probabilistic framework of robust and efficient color consistency correction for multiple images. ISPRS J. Photogramm. Remote Sens. 2022, 190, 1–24. [Google Scholar] [CrossRef]
- Pérez, P.; Gangnet, M.; Blake, A. Poisson image editing. ACM Trans. Graph. 2003, 22, 313–318. [Google Scholar] [CrossRef]
- Fang, F.; Wang, T.; Fang, Y.; Zhang, G. Fast color blending for seamless image stitching. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1115–1119. [Google Scholar] [CrossRef]
- Lin, K.; Jiang, N.; Cheong, L.F.; Do, M.; Lu, J. Seagull: Seam-guided local alignment for parallax-tolerant image stitching. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 370–385. [Google Scholar]
- Kerschner, M. Seamline detection in colour orthoimage mosaicking by use of twin snakes. ISPRS J. Photogramm. Remote Sens. 2001, 56, 53–64. [Google Scholar] [CrossRef]
- Yu, L.; Holden, E.J.; Dentith, M.C.; Zhang, H. Towards the automatic selection of optimal seam line locations when merging optical remote-sensing images. Int. J. Remote Sens. 2012, 33, 1000–1014. [Google Scholar] [CrossRef]
- Li, L.; Yao, J.; Lu, X.; Tu, J.; Shan, J. Optimal seamline detection for multiple image mosaicking via graph cuts. ISPRS J. Photogramm. Remote Sens. 2016, 113, 1–16. [Google Scholar] [CrossRef]
- Wang, M.; Yuan, S.; Pan, J.; Fang, L.; Zhou, Q.; Yang, G. Seamline determination for high resolution orthoimage mosaicking using watershed segmentation. Photogramm. Eng. Remote Sens. 2016, 82, 121–133. [Google Scholar] [CrossRef]
- Pang, S.; Sun, M.; Hu, X.; Zhang, Z. SGM-based seamline determination for urban orthophoto mosaicking. ISPRS J. Photogramm. Remote Sens. 2016, 112, 1–12. [Google Scholar] [CrossRef]
- Chen, Q.; Sun, M.; Hu, X.; Zhang, Z. Automatic seamline network generation for urban orthophoto mosaicking with the use of a digital surface model. Remote Sens. 2014, 6, 12334–12359. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Cao, W.; Xin, X.; Shao, Q.; Brolly, M.; Xiao, J.; Wan, Y.; Zhang, Y. Using vector building maps to aid in generating seams for low-attitude aerial orthoimage mosaicking: Advantages in avoiding the crossing of buildings. ISPRS J. Photogramm. Remote Sens. 2017, 125, 207–224. [Google Scholar] [CrossRef]
- Zheng, M.; Xiong, X.; Zhu, J. A novel orthoimage mosaic method using a weighted A* algorithm—Implementation and evaluation. ISPRS J. Photogramm. Remote Sens. 2018, 138, 30–46. [Google Scholar] [CrossRef]
- Yuan, S.; Yang, K.; Li, X.; Cai, H. Automatic seamline determination for urban image mosaicking based on road probability map from the D-LinkNet neural network. Sensors 2020, 20, 1832. [Google Scholar] [CrossRef] [Green Version]
- Brown, M.; Lowe, D.G. Automatic panoramic image stitching using invariant features. Int. J. Comput. Vis. 2007, 74, 59–73. [Google Scholar] [CrossRef] [Green Version]
- Zaragoza, J.; Chin, T.J.; Tran, Q.; Brown, M.; Suter, D. As-Projective-As-Possible Image Stitching with Moving DLT. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1285–1298. [Google Scholar]
- Chang, C.H.; Sato, Y.; Chuang, Y.Y. Shape-preserving half-projective warps for image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3254–3261. [Google Scholar]
- Gao, J.; Li, Y.; Chin, T.J.; Brown, M.S. Seam-driven image stitching. In Eurographics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 45–48. [Google Scholar]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef]
- Mozaffari, M.H.; Tay, L.L. One-dimensional active contour models for Raman spectrum baseline correction. arXiv 2021, arXiv:2104.12839. [Google Scholar]
- Mozaffari, M.H.; Tay, L.L. Overfitting one-dimensional convolutional neural networks for Raman spectra identification. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2022, 272, 120961. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Boykov, Y.; Veksler, O.; Zabih, R. Fast approximate energy minimization via graph cuts. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1222–1239. [Google Scholar] [CrossRef] [Green Version]
- Dai, Q.; Fang, F.; Li, J.; Zhang, G.; Zhou, A. Edge-guided composition network for image stitching. Pattern Recognit. 2021, 118, 108019. [Google Scholar] [CrossRef]
- Li, L.; Yao, J.; Liu, Y.; Yuan, W.; Shi, S.; Yuan, S. Optimal seamline detection for orthoimage mosaicking by combining deep convolutional neural network and graph cuts. Remote Sens. 2017, 9, 701. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Kim, S.J.; Brown, M.S. Constructing image panoramas using dual-homography warping. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 49–56. [Google Scholar]
- Lin, W.Y.; Liu, S.; Matsushita, Y.; Ng, T.T.; Cheong, L.F. Smoothly varying affine stitching. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 345–352. [Google Scholar]
- Li, J.; Wang, Z.; Lai, S.; Zhai, Y.; Zhang, M. Parallax-tolerant image stitching based on robust elastic warping. IEEE Trans. Multimed. 2017, 20, 1672–1687. [Google Scholar] [CrossRef]
- Lin, C.C.; Pankanti, S.U.; Natesan Ramamurthy, K.; Aravkin, A.Y. Adaptive as-natural-as-possible image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1155–1163. [Google Scholar]
- Zhang, F.; Liu, F. Parallax-tolerant image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3262–3269. [Google Scholar]
- Liu, F.; Gleicher, M.; Jin, H.; Agarwala, A. Content-preserving warps for 3D video stabilization. ACM Trans. Graph. 2009, 28, 1–9. [Google Scholar]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. Deep image homography estimation. arXiv 2016, arXiv:1606.03798. [Google Scholar]
- Zhang, J.; Wang, C.; Liu, S.; Jia, L.; Ye, N.; Wang, J.; Zhou, J.; Sun, J. Content-aware unsupervised deep homography estimation. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2020; pp. 653–669. [Google Scholar]
- Nie, L.; Lin, C.; Liao, K.; Zhao, Y. Learning edge-preserved image stitching from large-baseline deep homography. arXiv 2020, arXiv:2012.06194. [Google Scholar]
- Nie, L.; Lin, C.; Liao, K.; Liu, S.; Zhao, Y. Unsupervised deep image stitching: Reconstructing stitched features to images. IEEE Trans. Image Process. 2021, 30, 6184–6197. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and PATTERN recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Li, L.; Yao, J.; Xie, R.; Xia, M.; Zhang, W. A unified framework for street-view panorama stitching. Sensors 2016, 17, 1. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spatial Resolution | Spectral Bands | Descriptions | |
|---|---|---|---|
| AERIAL-1 | 0.1 m | IR-R-G | Small-sized buildings; many surrounding trees |
| AERIAL-2 | 0.2 m | R-G-B | Medium-sized buildings; dense residential area |
| SATELLITE-1 | 1 m | R-G-B | Suburb district; high speed road; woodland |
| Region Id | Seamline Length (pixel) | Buffer Width (pixel) | Time for SGM (s) | Time for Warping (s) |
|---|---|---|---|---|
| AERIAL-1 (a) | 940 | 450 | 1.011 | 11.829 |
| AERIAL-1 (b) | 738 | 60 | 0.776 | 0.507 |
| AERIAL-2 (a) | 823 | 600 | 0.588 | 11.061 |
| AERIAL-2 (b) | 552 | 390 | 0.525 | 4.896 |
| SATELLITE-1 (a) | 711 | 270 | 0.261 | 4.166 |
| SATELLITE-1 (b) | 314 | 420 | 0.133 | 3.756 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, H.; Li, Y.; Shi, J.; Jiang, J.; Li, L.; Yao, J. Optimizing Local Alignment along the Seamline for Parallax-Tolerant Orthoimage Mosaicking. Remote Sens. 2022, 14, 3271. https://doi.org/10.3390/rs14143271
Yin H, Li Y, Shi J, Jiang J, Li L, Yao J. Optimizing Local Alignment along the Seamline for Parallax-Tolerant Orthoimage Mosaicking. Remote Sensing. 2022; 14(14):3271. https://doi.org/10.3390/rs14143271
Chicago/Turabian StyleYin, Hongche, Yunmeng Li, Junfeng Shi, Jiaqin Jiang, Li Li, and Jian Yao. 2022. "Optimizing Local Alignment along the Seamline for Parallax-Tolerant Orthoimage Mosaicking" Remote Sensing 14, no. 14: 3271. https://doi.org/10.3390/rs14143271
APA StyleYin, H., Li, Y., Shi, J., Jiang, J., Li, L., & Yao, J. (2022). Optimizing Local Alignment along the Seamline for Parallax-Tolerant Orthoimage Mosaicking. Remote Sensing, 14(14), 3271. https://doi.org/10.3390/rs14143271