
A Nyström-Based Low-Complexity Algorithm with Improved Effective Array Aperture for Coherent DOA Estimation in Monostatic MIMO Radar


Abstract
1. Introduction
2. Monostatic MIMO Radar Echo Model
3. The Proposed Algorithm
3.1. Reduced Dimension Transformation for Direction Vector of MIMO Radar
3.2. Virtual Array Aperture Expansion
3.3. Approximate Signal Subspace Estimation
3.4. Decorrelation Processing
3.5. Coherent DOA Estimation
4. Complexity Analysis
5. Simulation Results
5.1. Demonstration of Equivalent Eigenvalues
5.2. Effectiveness of Estimation
5.3. RMSE Performance
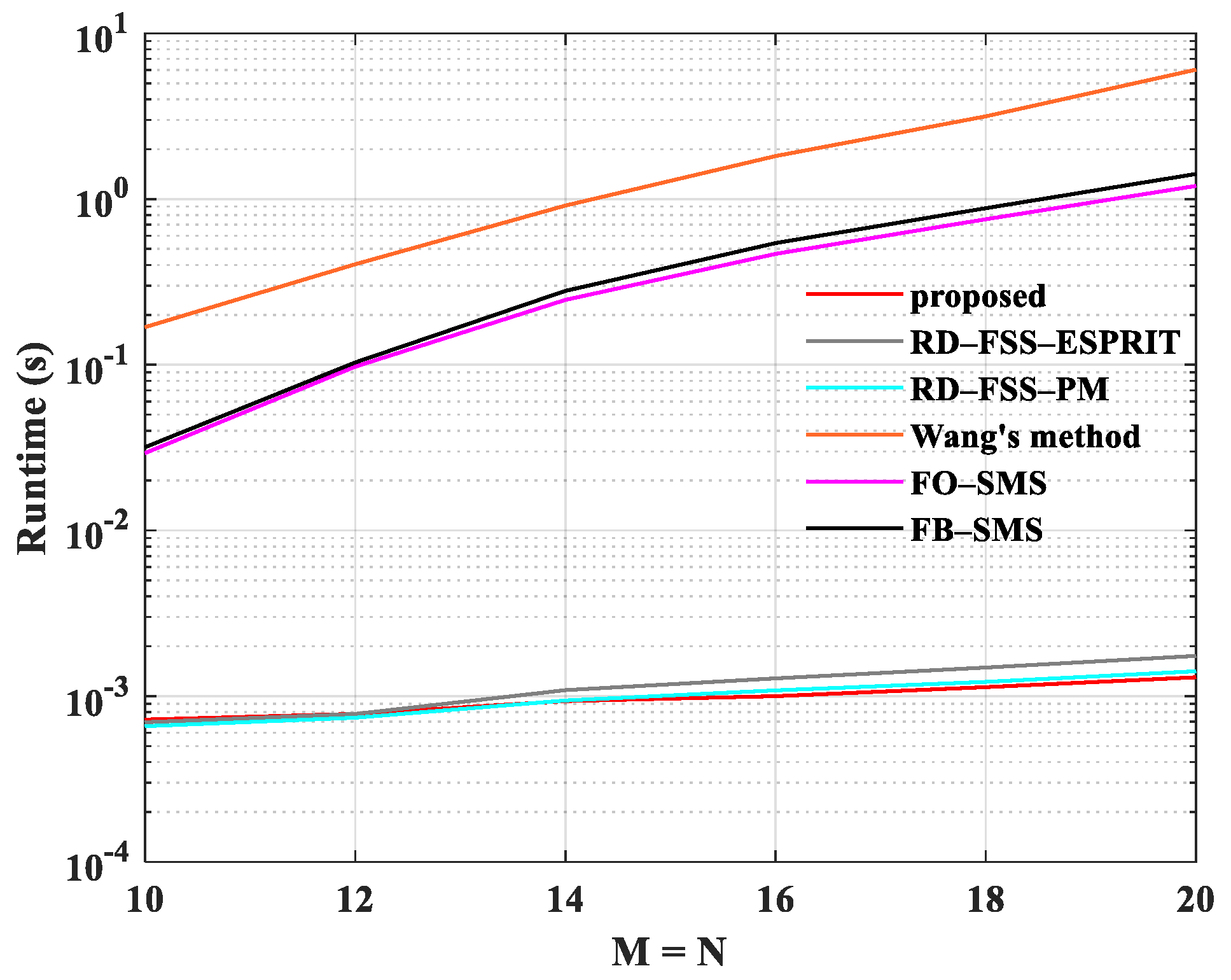
5.4. Runtime Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R.A. MIMO Radar: An Idea Whose Time Has Come. In Proceedings of the 2004 IEEE Radar Conference, Philadelphia, PA, USA, 29 April 2004; pp. 71–78. [Google Scholar]
- Li, J.; Stoica, P.; Xu, L.; Roberts, W. On parameter identifiability of MIMO radar. IEEE Signal Process. Lett. 2007, 14, 968–971. [Google Scholar]
- Li, J.; Stoica, P. MIMO radar with colocated antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Haimovich, A.; Blum, R.; Cimini, L. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Zhai, H.; Meng, X.T.; Yan, F.G. Overview on the target angle estimation technologies for MIMO radar. Radar Sci. Technol. 2021, 19, 144–151. [Google Scholar]
- Yan, H.D.; Li, J.; Liao, G.S. Multitarget identification and localization using bistatic MIMO radar systems. EURASIP J. Adv. Signal Process. 2007, 2008, 283483. [Google Scholar] [CrossRef]
- Zhang, X.F.; Xu, L.Y.; Xu, L.; Xu, D.Z. Direction of departure (DOD) and direction of arrival (DOA) estimation in MIMO radar with reduced-dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1161–1163. [Google Scholar] [CrossRef]
- Jinli, C.; Hong, G.; Weimin, S. Angle estimation using ESPRIT without pairing in MIMO radar. Electron. Lett. 2008, 44, 1422–1423. [Google Scholar] [CrossRef]
- Duofang, C.; Baixiao, C.; Guodong, Q. Angle estimation using ESPRIT in MIMO radar. Electron. Lett. 2008, 44, 770–771. [Google Scholar] [CrossRef]
- Qin, G.D.; Bao, D.; Liu, G.G.; Li, P. Cross-correlation matrix Root-MUSIC algorithm for bistatic multiple-input multiple-output radar. Sci. China Inf. Sci. 2015, 58, 1–10. [Google Scholar] [CrossRef][Green Version]
- Li, J.F.; Zhang, X.F. Unitary subspace-based method for angle estimation in bistatic MIMO radar. Circuits Syst. Signal Process. 2014, 33, 501–513. [Google Scholar] [CrossRef]
- Wang, W.; Wang, X.P.; Li, X.; Song, H.R. DOA estimation for monostatic MIMO radar based on unitary root-MUSIC. Int. J. Electron. 2013, 100, 1499–1509. [Google Scholar] [CrossRef]
- Tang, B.; Tang, J.; Zhang, Y.; Zheng, Z. Maximum likelihood estimation of DOD and DOA for bistatic MIMO radar. Signal Process. 2013, 93, 1349–1357. [Google Scholar] [CrossRef]
- Liu, B.Y.; Gui, G.; Matsushita, S.Y.; Xu, L. Adaptive filtering algorithm for direction-of-arrival (DOA) estimation with small snapshots. Digit. Signal Process. 2019, 94, 84–95. [Google Scholar] [CrossRef]
- Chen, H.Y.; Ahmad, F.; Vorobyov, S.; Porikli, F. Tensor decompositions in wireless communications and MIMO radar. IEEE J. Sel. Top. Signal Process. 2021, 15, 438–453. [Google Scholar] [CrossRef]
- Liu, T.; Wen, F.; Zhang, L.; Wang, K. Off-grid DOA estimation for colocated MIMO radar via reduced-complexity sparse Bayesian learning. IEEE Access 2019, 7, 99907–99916. [Google Scholar] [CrossRef]
- Zhang, X.F.; Wu, H.L.; Li, J.F.; Xu, D.Z. Computationally efficient DOD and DOA estimation for bistatic MIMO radar with propagator method. Int. J. Electron. 2012, 99, 1207–1221. [Google Scholar] [CrossRef]
- Shen, C.; Dong, F.; Wen, F.Q.; Gong, Z.H.; Zhang, K. An improved propagator estimator for DOA estimation in monostatic MIMO radar in the presence of imperfect waveforms. IEEE Access 2019, 7, 148771–148778. [Google Scholar] [CrossRef]
- Gong, J.; Guo, Y.D.; Wan, Q. An improved spatial difference smoothing method based on multistage wiener filtering. Math. Probl. Eng. 2019, 2019, 8515606. [Google Scholar] [CrossRef]
- Li, J.F.; Jiang, D.F. Performance analysis of propagator-based ESPRIT for direction of arrival estimation. IET Signal Process. 2018, 12, 481–486. [Google Scholar] [CrossRef]
- Fowlkes, C.; Belongie, S.; Chung, F.; Malik, J. Spectral grouping using the Nystrom method. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 214–225. [Google Scholar] [CrossRef]
- Qian, C.; Huang, L.; So, H.C. Computationally efficient ESPRIT algorithm for direction-of-arrival estimation based on Nyström method. Signal Process. 2014, 94, 74–80. [Google Scholar] [CrossRef]
- Veerendra, D. A new approach to achieve a trade-off between direction-of-arrival estimation performance and computational complexity. IEEE Commun. Lett. 2021, 25, 1183–1186. [Google Scholar]
- Drineas, P.; Mahoney, M.W. On the Nyström method for approximating a Gram matrix for improved kernel-based learning. J. Mach. Learn. Res. 2005, 6, 2153–2175. [Google Scholar]
- Wang, X.P.; Huang, M.X.; Cao, C.J.; Li, H. Angle estimation noncircular source MIMO radar via unitary Nystrom method. Lect. Notes Electr. Eng. 2019, 463, 339–346. [Google Scholar]
- Liu, B.B.; Xue, T.; Xu, C.; Liu, Y.J. Computationally efficient unitary ESPRIT algorithm in bistatic MIMO radar. Math. Probl. Eng. 2021, 2021, 5584688. [Google Scholar] [CrossRef]
- Ye, Z.F.; Luo, D.W.; Wei, J.Q.; Xu, X. Review for coherent DOA estimation technique. J. Data Acquis. Process. 2017, 32, 258–265. [Google Scholar]
- Pan, J.J.; Sun, M.; Wang, Y.D.; Zhang, X.F. An enhanced spatial smoothing technique with ESPRIT algorithm for direction of arrival estimation in coherent scenarios. IEEE Trans. Signal Process. 2020, 68, 3635–3643. [Google Scholar] [CrossRef]
- Li, C.C.; Liao, G.S.; Zhu, S.Q.; Wu, S.Y. An ESPRIT-like algorithm for coherent DOA estimation based on data matrix decomposition in MIMO radar. Signal Process. 2011, 91, 1803–1811. [Google Scholar] [CrossRef]
- Zhang, F.; Jin, A.S.; Hu, Y. Two-dimensional DOA estimation of MIMO radar coherent source based on Toeplitz matrix set reconstruction. Secur. Commun. Netw. 2021, 2021, 6631196. [Google Scholar] [CrossRef]
- Zheng, Z.D.; Zhang, J.Y.; Wang, T. Coherent angle estimation based on Hankel matrix construction in bistatic MIMO radar. Int. J. Electron. 2013, 100, 190–195. [Google Scholar] [CrossRef]
- Tabrikian, J.; Bekkerman, I. Transmission Diversity Smoothing for Multi-Target Localization. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 23 March 2005; Volume 4, pp. IV-1041–IV-1044. [Google Scholar]
- Cao, R.Z.; Zhang, X.F. Joint angle and Doppler frequency estimation of coherent targets in monostatic MIMO radar. Int. J. Electron. 2015, 102, 792–814. [Google Scholar] [CrossRef]
- Cao, R.Z.; Zhang, X.F. Computation efficient joint angle and doppler frequency estimation of coherent targets in monostatic MIMO radar. J. Data Acquis. Process. 2018, 33, 826–836. [Google Scholar]
- Zhang, W.; Liu, W.; Wang, J.; Wu, S.L. Joint transmission and reception diversity smoothing for direction finding of coherent targets in MIMO radar. IEEE J. Sel. Top. Signal Process. 2014, 8, 115–124. [Google Scholar] [CrossRef]
- Wang, X.P.; Wang, W.; Ma, Y.H.; Wang, J.X. Joint DOD and DOA estimation for MIMO radar with lower snapshots. J. Harbin Eng. Univ. 2014, 35, 1129–1134. [Google Scholar]
- Hong, S.; Wan, X.R.; Ke, H.Y. Spatial difference smoothing for coherent sources location in MIMO radar. Signal Process. 2015, 109, 69–83. [Google Scholar] [CrossRef]
- Shi, J.P.; Hu, G.P.; Zhang, X.F.; Jin, S.S. Smoothing matrix set-based MIMO radar coherent source localization. Int. J. Electron. 2018, 105, 1345–1357. [Google Scholar] [CrossRef]
- Xenaki, A.; Gerstoft, P.; Mosegaard, K. Compressive beamforming. J. Acoust. Soc. Am. 2014, 136, 260–271. [Google Scholar] [CrossRef]
- Wen, F.Q.; Zhang, Z.J.; Zhang, G.; Zhang, Y.; Wang, X.H.; Zhang, X.Y. A tensor-based covariance differencing method for direction estimation in bistatic MIMO radar with unknown spatial colored noise. IEEE Access 2017, 5, 18451–18458. [Google Scholar] [CrossRef]
- Thakre, A.; Haardt, M.; Giridhar, K. Single snapshot spatial smoothing with improved effective array aperture. IEEE Signal Process. Lett. 2009, 16, 505–508. [Google Scholar] [CrossRef]
- Liu, H.M.; Yang, X.J.; Wang, R.; Jin, W.; Jin, W.M. Transmit/Receive spatial smoothing with improved effective array aperture for angle and mutual coupling estimation in bistatic MIMO Radar. Int. J. Antennas Propag. 2016, 2016, 6271648. [Google Scholar] [CrossRef]
- Ma, T.; Du, J.; Qiao, L.Y. A Low-Complexity DOA Estimation Algorithm Based on Nyström Method for Mixed Signals. In Proceedings of the 2021 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 17–19 August 2021. [Google Scholar]
- Xu, L.Q.; Li, Y. Low-complexity root-MUSIC algorithm for angle estimation in monostatic MIMO radar. Syst. Eng. Electron. 2017, 39, 2434–2440. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Computation load |
|---|---|
| Wang’s method | |
| RD-FSS-ESPRIT | |
| RD-FSS-PM | |
| FO-SMS/FB-SMS | |
| Proposed |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, T.; Du, J.; Shao, H. A Nyström-Based Low-Complexity Algorithm with Improved Effective Array Aperture for Coherent DOA Estimation in Monostatic MIMO Radar. Remote Sens. 2022, 14, 2646. https://doi.org/10.3390/rs14112646
Ma T, Du J, Shao H. A Nyström-Based Low-Complexity Algorithm with Improved Effective Array Aperture for Coherent DOA Estimation in Monostatic MIMO Radar. Remote Sensing. 2022; 14(11):2646. https://doi.org/10.3390/rs14112646
Chicago/Turabian StyleMa, Teng, Jiang Du, and Huaizong Shao. 2022. "A Nyström-Based Low-Complexity Algorithm with Improved Effective Array Aperture for Coherent DOA Estimation in Monostatic MIMO Radar" Remote Sensing 14, no. 11: 2646. https://doi.org/10.3390/rs14112646
APA StyleMa, T., Du, J., & Shao, H. (2022). A Nyström-Based Low-Complexity Algorithm with Improved Effective Array Aperture for Coherent DOA Estimation in Monostatic MIMO Radar. Remote Sensing, 14(11), 2646. https://doi.org/10.3390/rs14112646